En las últimas entradas hemos estudiado algunas ecuaciones diferenciales no lineales de primer orden y hemos revisado algunos métodos para resolver este tipo de ecuaciones. En esta ocasión veremos dos tipos de ecuaciones no lineales, que mediante un cambio de variable apropiado pueden convertirse en una ecuación lineal, las cuales ya sabemos resolverlas. Nos referimos a las ecuaciones de Bernoulli y Riccati, que deben su nombre a Jakob Bernoulli (1655-1705) y Jacopo Francesco Riccati (1676-1754).
Ecuación de Bernoulli
En el video resolveremos la ecuación de Bernoulli en su forma general y posteriormente revisaremos un ejemplo de este tipo de ecuaciones.
Ecuación de Riccati
Resolvemos la ecuación de Riccati en su forma general haciendo un cambio de variable que lleva a una ecuación lineal de primer orden. Luego, resolvemos un ejemplo de una ecuación de Riccati.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Encuentra la expresión general para la solución $y(t)$ a la ecuación de Bernoulli $$\frac{dy}{dt}+p(t)y=q(t)y^{n}.$$
Resuelve la ecuación de Bernoulli $$\frac{dy}{dt}-\frac{1}{3t}y=e^{t}y^{4}$$.
Verifica que la ecuación logística $$\frac{dP}{dt}=k(1-\frac{P}{N})P$$ es una ecuación tipo Bernoulli y resuélvela.
Verifica que $y_{1}(t)=t$ es una solución particular a la siguiente ecuación de Riccati y encuentra su solución general: $$\frac{dy}{dt}=1+t^{2}-2ty+y^{2}.$$
Las ecuaciones de Bernoulli y Riccati se pueden relacionar mediante un cambio de variable. Sea $y_{1}(t)$ una solución particular a la ecuación de Riccati. Haz el cambio de variable $y(t)=y_{1}(t)+v(t)$ y transforma la ecuación de Riccati en una ecuación de Bernoulli.
Más adelante
Hemos terminado el análisis de diversos tipos de ecuaciones no lineales de primer orden. Es tiempo de justificar toda la teoría que desarrollamos mediante el teorema de existencia y unicidad, como lo hicimos con las ecuaciones lineales de primer orden.
Existen diversas versiones de este teorema; nosotros demostraremos el teorema de existencia y unicidad de Picard para ecuaciones de primer orden. Demostrarlo no es tan sencillo como para el caso lineal, por lo que tendremos que desarrollar algunas herramientas extra que iremos presentando a lo largo de la siguiente entrada, junto con la demostración del teorema de existencia y unicidad de Picard.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
¿Cómo es posible un error en las matemáticas?. – Henri Poincare
Introducción
Continuando con la descripción cualitativa de las ecuaciones diferenciales, en esta entrada estudiaremos las ecuaciones diferenciales en las que la función razón no depende explícitamente de la variable independiente $x$.
En la entrada anterior vimos una propiedad geométrica interesante de las ecuaciones diferenciales de la forma
$$\dfrac{dy}{dx} = f(y) \label{1} \tag{1}$$
dicha propiedad es que los elementos lineales en dos puntos distintos del plano $XY$, pero con la misma coordenada $y$, tienen la misma pendiente, esta propiedad tiene interesantes consecuencias y las estudiaremos en esta entrada.
Ecuaciones de primer orden autónomas
Definición: Una ecuación diferencial ordinaria en la que no aparece explícitamente la variable independiente $$F(y, y^{\prime}) = 0 \label{2} \tag{2}$$ se llama autónoma.
Una ecuación autónoma en su forma normal se ve como (\ref{1}).
La ecuación diferencial
$$\dfrac{dy}{dx} = 1 + 2y$$
es una ecuación diferencial autónoma, mientras que la ecuación
$$\dfrac{dy}{dx} = 2xy$$
es una ecuación no autónoma ya que la función razón
$$f(x, y) = 2xy$$
sí depende de la variable independiente $x$.
Hay muchos procesos físicos que son modelados con ecuaciones diferenciales autónomas donde la variable independiente puede ser por ejemplo el tiempo $t$, en estos casos dichos procesos no cambiarían en el tiempo.
Puntos críticos
En la ecuación diferencial autónoma (\ref{1}) las raíces de la función razón son de especial importancia.
Definición: Un número real $k$ es un punto crítico de la ecuación diferencial autónoma (\ref{1}) si es una raíz de la función razón $f$ igualada a cero, es decir, si $f(k) = 0$.
Un punto crítico también es llamado punto de equilibrio o punto estacionario.
Definición: Una solución constante $y(x) = k$ de la ecuación diferencial autónoma (\ref{1}) se llama solución de equilibrio.
Con estas dos definiciones podemos observar que si $k$ es un punto crítico de la ecuación (\ref{1}), entonces $y(x) = k$ es una solución constante de la ecuación diferencial autónoma.
Esquema de fases
En la entrada anterior vimos que una propiedad geométrica de las ecuaciones autónomas es que los elementos lineales son paralelos a lo largo de líneas horizontales en el plano $XY$, esto quiere decir que si conocemos el campo de pendientes a lo largo de una sola línea vertical $x = x_{0}$, entonces lo conocemos para todo el plano $XY$. Esta propiedad nos permite, en lugar de dibujar todo el plano, dibujar una sola línea que contiene la misma información. Esta línea se llama línea fase para la ecuación autónoma.
Definición: La línea fase de una ecuación diferencial autónoma es un diagrama en forma de línea recta que contiene la información del comportamiento de las soluciones de la ecuación diferencial.
Para ver cómo obtener los puntos críticos, soluciones de equilibrio y líneas fase realicemos el siguiente ejemplo con una ecuación logística.
Ejemplo: Obtener los puntos críticos, soluciones de equilibrio y línea fase de la siguiente ecuación diferencial autónoma.
Solución: Para obtener las soluciones de equilibrio y los puntos críticos igualamos la función razón a cero.
$$f(y) = y(\alpha -\beta y) = 0$$
La ecuación se satisface si $y = 0$ o $\alpha -\beta y = 0$, es decir, si
$$y(x) = 0 \hspace{1cm} o \hspace{1cm} y(x) = \dfrac{\alpha}{\beta}$$
Estas funciones corresponden a las soluciones de equilibrio de la ecuación diferencial y los puntos críticos no son más que las constantes $k_{1} = 0$ y $k_{2} = \dfrac{\alpha}{\beta} > 0$.
Para esbozar la línea fase comencemos por colocar dos puntos sobre una línea vertical, dichos puntos corresponden a los puntos críticos obtenidos.
Puntos críticos en la línea fase.
La línea fase es paralela al eje $Y$, o bien puede ser el mismo eje $Y$.
En este caso los puntos críticos dividen a la línea fase en tres intervalos:
Por definición los puntos críticos son los valores en los que
$$\dfrac{dy}{dx} = f(k) = 0$$
esto significa que la pendiente de los elementos lineales en los puntos críticos debe ser cero, mientras que por encima y por debajo de los puntos críticos la pendiente tiene que ser distinta de cero, así que puede haber elementos lineales con pendiente negativa o pendiente positiva.
Veamos en cada uno de los intervalos de nuestro ejemplo que signo tiene la pendiente de los elementos lineales, como se trata de un diagrama unidimensional dicho valor lo representaremos con flechas sobre la línea fase, si la pendiente es positiva colocaremos una flecha apuntando hacia arriba y si es una pendiente negativa colocaremos una flecha apuntando hacia abajo.
Para ver si la pendiente es positiva o negativa estudiemos el signo de la función razón (que es equivalente al signo de la derivada $\dfrac{dy}{dx}$) en cada uno de los intervalos. Comencemos con el intervalo $(-\infty, 0)$, en este caso $-\infty < y < 0$.
\begin{align*} y &< 0 \\ \beta y &< 0 \\ -\beta y &> 0 \\ -\beta y + \alpha > \alpha &> 0 \\ f(y) = y(\alpha -\beta y) &< 0 \\ \dfrac{dy}{dx} &< 0 \end{align*}
Este análisis nos indica que la pendiente de los elementos lineales en el intervalo $(-\infty, 0)$ es negativa.
Haciendo un análisis similar en los intervalos $\left( 0, \dfrac{\alpha}{\beta} \right)$ y $\left(\dfrac{\alpha}{\beta}, \infty \right)$ obtenemos los siguientes resultados:
En $(-\infty, 0)$ $\hspace{0.2cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) < 0$ $\Rightarrow$ La pendiente es negativa
En $\left( 0, \dfrac{\alpha}{\beta} \right)$ $\hspace{0.2cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) > 0$ $\Rightarrow$ La pendiente es positiva.
En $\left( \dfrac{\alpha}{\beta}, \infty \right)$ $\hspace{0.05cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) < 0$ $\Rightarrow$ La pendiente es negativa.
Como mencionamos antes, en el intervalo $(-\infty, 0)$ de la línea fase colocaremos una flecha apuntando hacia abajo debido a que la pendiente es negativa. En el intervalo $\left( 0, \dfrac{\alpha}{\beta} \right)$ colocaremos una flecha apuntando hacia arriba ya que la pendiente es positiva y finalmente en el intervalo $\left(\dfrac{\alpha}{\beta}, \infty \right)$ colocaremos nuevamente una flecha hacia abajo debido a que la pendiente vuelve a ser negativa. La línea fase de la ecuación diferencial dada se muestra en la siguiente figura.
Línea fase de la ecuación $\dfrac{dy}{dx} = y(\alpha-\beta y)$.
Como caso particular consideremos la ecuación diferencial autónoma
$$\dfrac{dy}{dx} = y(6 -3y)$$
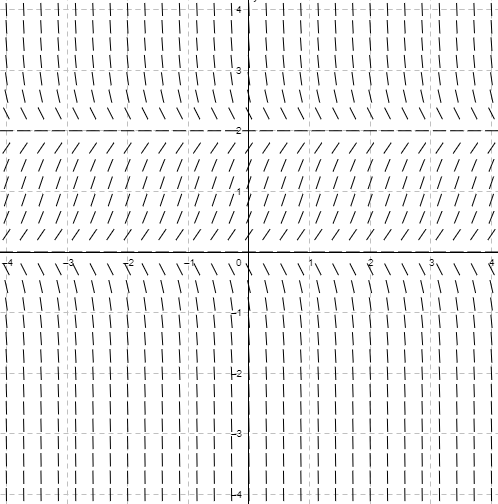
Las soluciones de equilibrio son $y(x) = 0$ y $y(x) = \dfrac{\alpha}{\beta} = \dfrac{6}{3} = 2$. A continuación se muestra el campo de pendientes de esta ecuación.
Campo de pendientes de la ecuación diferencial $\dfrac{dy}{dx} = y(6 -3y)$.
Notamos que, en efecto, el valor de la pendiente de los elementos lineales en las soluciones de equilibrio es cero, por encima de $y(x) = 2$ y por debajo de $y(x) = 0$ la pendiente es negativa y entre las soluciones de equilibrio la pendiente de los elementos lineales es positiva, tal como lo mostramos en la línea fase del caso general.
$\square$
Como podemos ver, la línea fase es una gran herramienta que nos permite analizar el comportamiento de las soluciones de una ecuación diferencial autónoma gracias a que las pendientes de los elementos lineales en líneas horizontales del plano $XY$ son siempre iguales.
Con el ejemplo en mente ahora podemos establecer los pasos necesarios para dibujar una línea fase de una ecuación diferencial autónoma.
Comenzamos por dibujar una línea vertical paralela al eje $Y$ para cualquier valor de $x$.
Determinamos las soluciones de equilibrio y los puntos críticos, marcamos los puntos críticos sobre la línea vertical.
Determinamos los intervalos de $y$ en los que $f(y) > 0$ y dibujamos flechas apuntando hacia arriba en esos intervalos.
Determinamos los intervalos de $y$ en los que $f(y) < 0$ y dibujamos flechas apuntando hacia abajo en esos intervalos.
Las líneas fase nos permiten obtener una aproximación cualitativa de las curvas solución de una ecuación diferencial autónoma.
Nota: En ocasiones se usan de forma indistinta los términos puntos críticos y soluciones de equilibrio, sin embargo podemos pensar a un punto crítico como el punto $c = k$ que se coloca en la línea fase, mientras que una solución de equilibrio $y(x) = k$ como la gráfica en el plano $XY$ de una función constante para toda $x$. Cuando estamos analizando líneas fase puede ser que al punto crítico también se le llame solución de equilibrio y es correcto debido a que la línea fase representa al eje de la variable dependiente $y$ para cualquier valor de la variable independiente $x$. Lo importante es que tengamos presente las definiciones de punto crítico y de solución de equilibrio que establecimos al inicio para evitar confusiones.
Ahora veamos que nos dice esta descripción cualitativa acerca de la forma de una curva solución de una ecuación diferencial autónoma.
Curvas solución de una ecuación diferencial autónoma
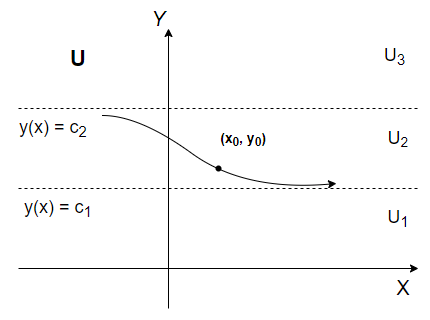
En la ecuación diferencial autónoma (\ref{1}) la función $f$ es independiente de la variable $x$, esto nos permite suponer que $f$ está definida en $x \in (-\infty, \infty)$, o en $x \in [0, \infty)$. Consideremos una región $U$ en el plano $XY$ en el que se cumple el teorema de existencia y unicidad de una solución, por este teorema sabemos que existe una solución que pasa por el punto $(x_{0}, y_{0})$. En la región $U$ supongamos que una ecuación diferencial autónoma tiene dos puntos críticos $c_{1}$ y $c_{2}$ tales que $c_{1} < c_{2}$. Las gráficas de las soluciones
$$y(x) = c_{1} \hspace{1cm } y \hspace{1cm} y(x) = c_{2}$$
son rectas horizontales que dividen a la región $U$ en tres regiones: $U_{1}, U_{2}$ y $U_{3}$, esto se puede visualizar en la siguiente figura.
Subregiones $U_{1}, U_{2}$ y $U_{3}$ de $U$.
Con estas condiciones podemos establecer las siguientes propiedades.
Si el punto $(x_{0}, y_{0})$ está en alguna subregión $U_{i}$, $i = 1, 2, 3$ y $y(x)$ es una solución cuya curva solución pasa por $(x_{0}, y_{0})$, entonces $y(x)$ debe permanecer en esa subregión $U_{i}$ para toda $x$.
Esto indica que una solución $y(x)$ no puede cruzar la grafica de una solución de equilibrio $y(x) = c$. Para argumentar este hecho consideremos a $k$ como un punto crítico de una ecuación diferencial autónoma tal que $f(k) = 0$, considerando que $f(y)$ es continua, si las soluciones $y(x)$ son cercanas a $k$, entonces el valor de $f$ debe ser pequeño, esto nos indica que las soluciones se están desplazando lentamente cuando están próximas a los puntos críticos, dicho de otra manera, una solución que se acerca a un punto crítico cuando $x$ crece (o decrece) se mueve cada vez más lento al acercarse a éste. Por el teorema de existencia y unicidad, una solución que se acerca a un punto crítico nunca llega realmente a él, es decir, la solución de equilibrio se vuelve una asíntota para todas las soluciones $y(x)$ que se aproximan al punto crítico.
En la figura anterior, por ejemplo, la curva $y(x)$ que pasa por el punto $(x_{0}, y_{0})$ debe mantenerse dentro de $U_{2}$ para toda $x$, $y(x)$ está acotada por arriba con $c_{2}$ y por abajo con $c_{1}$, esto es, $c_{1} < y(x) < c_{2}$.
Otra propiedad es la siguiente.
Por continuidad de la función $f$, debe ser $f(y) > 0$ o $f(y) < 0$ para toda $x$ en una subregión $U_{i}$, $i = 1, 2, 3$.
Vimos anteriormente que el signo de la pendiente se mantiene igual dentro de toda la región limitada por los puntos críticos, esto nos permite deducir que una curva solución $y(x)$ no puede oscilar o tener extremos relativos (máximos o mínimos) dentro de una misma región. Esto lo podemos describir con la siguiente propiedad.
Debido a que $\dfrac{dy}{dx} = f(y(x))$ es positiva o negativa en una subregión $U_{i}$, $i = 1, 2, 3$, una solución $y(x)$ es estrictamente monótona, por lo tanto no puede oscilar ni tener extremos relativos.
Ahora que conocemos estas propiedades podemos establecer una más que se puede deducir de las anteriores. Basándonos en el caso general de la imagen anterior podemos decir lo siguiente.
Si $y(x)$ es una solución dentro de la región $U_{1}$, entonces está acotada por arriba con el punto crítico $c_{1}$, esto es, $\forall$ $x$ en el intervalo $$y(x) < c_{1}$$ Esto indica que la curva solución $y(x)$ debe tender a la gráfica de la solución de equilibrio $y(x) = c_{1}$ a medida que $x \rightarrow \infty$ o $x \rightarrow -\infty$. Por otro lado, una solución $y(x)$ que este en la región $U_{2}$ está acotada por abajo con $c_{1}$ y arriba con $c_{2}$, esto es, $\forall$ $x$ en el intervalo $$c_{1} < y(x) < c_{2}$$ Entonces la curva solución $y(x)$ debe tender a las gráficas de las soluciones de equilibrio $y(x) = c_{1}$ y $y(x) = c_{2}$ conforme $x \rightarrow \infty$ en una y $x \rightarrow -\infty$ en la otra. Finalmente, si la solución está en la region $U_{3}$ entonces está acotada por abajo con $c_{2}$, es decir, $\forall$ $x$ $$y(x) > c_{2}$$ En este caso la grafica $y(x)$ debe tender a la gráfica de la solución de equilibrio $y(x) = c_{2}$ conforme $x \rightarrow \infty$ o $x \rightarrow -\infty$.
Veamos la importancia de estas propiedades en un ejemplo.
Modelo logístico de la población
En esta entrada ya estudiamos como ejemplo la ecuación logística (\ref{3}), usemos los resultados obtenidos para resolver de manera cualitativa el problema del modelo logístico de la población visto en la entrada anterior. El modelo que establecimos fue
$$\dfrac{dP}{dt} = k \left(1 -\dfrac{P}{N}\right) P \label{4} \tag{4}$$
Este modelo corresponde a una ecuación diferencial autónoma.
$$\dfrac{dP}{dt} = f(P) \label{5} \tag{5}$$
así que las curvas solución las podemos describir con la teoría que hemos construido en esta entrada.
El problema que analizábamos era el crecimiento de la población en función de su entorno y los recursos limitados a los que están sujetos. Resolvamos la ecuación diferencial de manera cualitativa aplicando lo que hemos aprendido hasta ahora e interpretemos los resultados.
Comencemos por determinar las soluciones de equilibrio y los puntos críticos, para ello igualemos la ecuación a cero.
$$\dfrac{dP}{dt} = k \left(1 -\dfrac{P}{N}\right) P = 0$$
Esta relación se satisface si
$$kP = 0 \hspace{1cm} o \hspace{1cm} 1 -\dfrac{P}{N} = 0$$
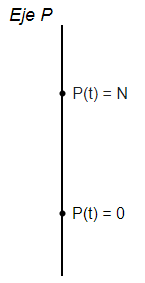
Es decir, si $P = 0$ o $P = N$. Por lo tanto, los puntos críticos son $c_{1} = 0$ y $c_{2} = N$, mientras que las soluciones de equilibrio son $P(t) = 0$ y $P(t) = N$.
Coloquemos los puntos críticos sobre la línea fase.
Puntos críticos en la línea fase.
Los puntos críticos definen tres intervalos para $P$, estos son
$$(-\infty, 0), \hspace{1cm} (0, N) \hspace{1cm} y \hspace{1cm} (N, \infty)$$
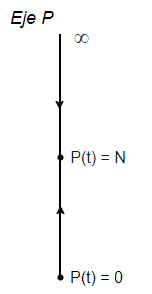
Sin embargo, como se trata de un problema real es claro que no tiene sentido que la variable población $P(t)$ sea negativa (no hay individuos negativos), así mismo no hay tiempos negativos por lo que $t > 0$, por lo tanto en este problema sólo consideraremos los intervalos $(0, N)$ y $(N, \infty)$ para $P$, así como $0 < t < \infty$.
Del caso general (\ref{3}) deducimos que en el intervalo $(0, N)$ las pendientes son positivas, así que la función $P(t)$ será creciente en dicho intervalo y en $(N, \infty)$ las pendientes son negativas, por tanto la función $P(t)$ será decreciente. La línea fase final queda de la siguiente manera.
Línea fase del modelo logístico.
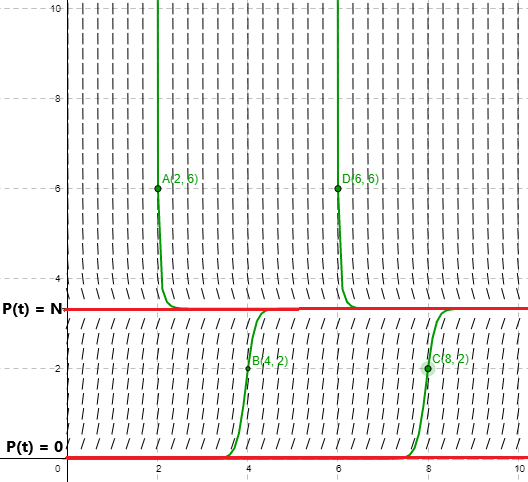
Un ejemplo de como se ve el campo de pendientes, las soluciones de equilibrio y algunas curvas solución de la ecuación logística (\ref{4}) se muestra en la siguiente figura.
Campo de pendientes de la ecuación logística (4) para valores particulares de $k$ y $N$.
De este gráfico notamos que las curvas solución cumplen con las hipótesis que establecimos al plantear el modelo, dichas hipótesis eran
Si la población es pequeña $(P(t) < N)$, la tasa de crecimiento de la población es proporcional a su tamaño.
Si la población es demasiado grande para ser soportada por su entorno y recursos $(P(t) > N)$, la población disminuirá, en este caso la tasa de crecimiento será negativa.
Las soluciones de equilibrio $P(t) = 0$ y $P(t) = N$ tienen sentido, pues si la población es cero permanecerá en cero indefinidamente y si la población es exactamente la asociada con la capacidad de soporte, entonces no crecerá ni disminuirá.
Es así que a partir de la línea fase y el campo de pendientes de una ecuación diferencial autónoma podemos esbozar varias curvas solución con distintas condiciones iniciales. En este ejemplo la única información que necesitamos es el hecho de que $P = 0$ y $P = N$ son soluciones de equilibrio, $P(t)$ crece si $0 < P < N$ y disminuye si $P > N$ o $P < 0$. Los valores exactos de $P(t)$ en cualquier tiempo dado $t$ dependerán de los valores $P(0)$, $k$ y $N$.
$\square$
Clasificación de puntos de equilibrio
Como vimos, alrededor de un punto crítico las soluciones pueden tener distintos comportamientos. Básicamente hay tres tipos de comportamiento que $y(x)$ puede tener alrededor de un punto crítico y en base a estos comportamientos podemos clasificarlos.
Supongamos que $y(x) = y_{0}$ es una solución de equilibrio de la ecuación diferencial autónoma (\ref{1}), los tres tipos de comportamiento que $y(x)$ puede tener alrededor del punto crítico $y_{0}$ son:
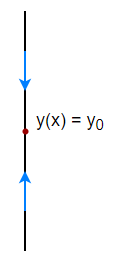
Caso 1: Por arriba de $y_{0}$ la función $y(x)$ es decreciente y por debajo de $y_{0}$ la función $y(x)$ es creciente, en este caso decimos que el punto crítico es un atractor.
$y_{0}$ es un atractor.
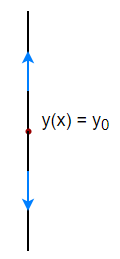
Caso 2: Por arriba de $y_{0}$ la función $y(x)$ es creciente y por debajo de $y_{0}$ la función $y(x)$ es decreciente, en este caso decimos que el punto crítico es un repulsor.
$y_{0}$ es un repulsor.
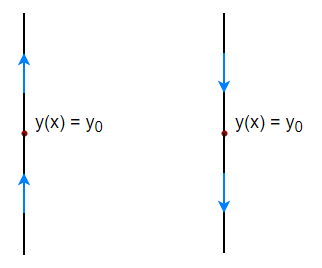
Caso 3: Tanto por arriba y por abajo de $y_{0}$ la función $y(x)$ es creciente o decreciente, en este caso decimos que el punto crítico es un nodo o punto semiestable.
$y_{0}$ es un nodo o punto semiestable.
En resumen, sea $y(x)$ solución de una ecuación diferencial autónoma (\ref{1}).
Si $f(y_{0}) = 0$, entonces $y_{0}$ es un punto crítico y $y(x) = y_{0}$ es la solución de equilibrio para toda $x$.
Si $f(y_{0}) > 0$, entonces $y(x)$ es creciente para toda $x$ y $y(x) \rightarrow \infty$, cuando $x$ incrementa, o bien $y(x)$ tiende al primer punto de equilibrio mayor que $y_{0}$.
Si $f(y_{0}) < 0$, entonces $y(x)$ es decreciente para toda $x$ y $y(x) \rightarrow -\infty$, cuando $x$ incrementa, o bien $y(x)$ tiende al primer punto de equilibrio menor que $y_{0}$.
Importante mencionar que esto también es valido para $x$ negativas. Cuando $x$ decrece podemos encontrar resultados similares.
Si $f(y_{0}) > 0$, entonces $y(x) \rightarrow -\infty$ o al siguiente punto de equilibrio menor conforme $x$ aumenta en valores negativos.
Si $f(y_{0}) < 0$, entonces $y(x) \rightarrow \infty$ o al siguiente punto de equilibrio mayor conforme $x$ aumenta en valores negativos.
Un caso especial
Consideremos la ecuación diferencial autónoma
$$\dfrac{dy}{dx} = \dfrac{1}{1 -y}$$
Intentemos esbozar la línea fase. Por definición, los puntos críticos son los valores para los que $f(y) = 0$, sin embargo en este caso $f(y)$ no puede ser cero.
Notemos que si $y > 1$, entonces $f(y) < 0$ y si $y < 1$, entonces $f(y) > 0$, pero si $y = 1$, $f(y)$ no esta definida. En este caso decimos que la línea fase tiene un agujero en $y =1$ y lo denotamos como un circulo vacío.
Agujero en la línea fase.
Las soluciones $y(x)$ de la ecuación tienden hacia $y = 1$ cuando $x$ aumenta.
Concluyamos esta entrada con el enunciado de un teorema importante.
Teorema de linearización
Existe un teorema conocido como teorema de linearización que nos ayuda a determinar el tipo de puntos críticos de una ecuación diferencial autónoma (\ref{1}), de acuerdo al comportamiento que tiene la función $f(y)$. El enunciado de este teorema es el siguiente.
Teorema: Sea $y_{0}$ un punto crítico de la ecuación diferencial autónoma (\ref{1}), donde $f$ es una función continua y diferenciable, entonces:
Si $f^{\prime}(y_{0}) < 0$, entonces $y_{0}$ es un atractor.
Si $f^{\prime}(y_{0}) > 0$, entonces $y_{0}$ es repulsor.
Si $f^{\prime}(y_{0}) = 0$ o si $f^{\prime}(y_{0})$ no existe, entonces no podemos concluir nada sobre $y_{0}$.
La demostración a este teorema la podemos encontrar en la sección de videos.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Para las siguientes ecuaciones diferenciales, esbozar las líneas fase y clasificar a los puntos críticos como atractores, repulsores o nodos según sea el caso.
$\dfrac{dy}{dx} = 3y(1 -y)$
$\dfrac{dv}{du} = \dfrac{1}{v -2}$
$\dfrac{dy}{dt} = \cos(y)$
$\dfrac{dw}{dt} = w^{2} -6w -16$
Para cada condición inicial dada, describir cualitativamente el comportamiento a largo plazo de las soluciones de la ecuación diferencial
$\dfrac{dy}{dx} = y^{2} -4y + 2$
con condición inicial
$y(0) = 0$
$y(0) = 10$
$y(3) = 1$
Más adelante…
En estas dos últimas entradas hemos estudiado a las ecuaciones diferenciales ordinarias de primer orden desde una perspectiva cualitativa, esto nos ha permitido esbozar las curvas solución y encontrar propiedades interesantes sin siquiera conocer la forma explicita de la solución. En particular, las ecuaciones diferenciales autónomas presentan propiedades interesantes que son útiles para analizar modelos que describen algún fenómeno real.
Ha llegado el momento de estudiar los distintos métodos de resolución de las ecuaciones diferenciales ordinarias de primer orden. Comenzaremos con un método sencillo que funciona sólo para ecuaciones diferenciales lineales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En la primera entrada del curso definimos algunos objetos importantes que nos permitirán desarrollar la teoría. Es importante mencionar que para poder empezar a construir una teoría, se tienen que suponer algunas propiedades como ciertas. A este tipo de propiedades que se aceptan a priori les llamamos axiomas.
En Lógica Matemática se requiere que los axiomas de una teoría tengan las siguientes tres características:
$i)$ ser completos, esto quiere decir que a partir de ellos todas las proposiciones referentes a objetos de la teoría puedan ser demostradas, $ii)$ que sean independientes, es decir, que ninguno de ellos pueda ser demostrado a partir de los demás, $iii)$ que sean consistentes, es decir, que no se contradigan.
Postulados de Euclides
Euclides fue un matemático griego que vivió alrededor del año 300 AC. En su obra reunió los conocimientos fundamentales que los matemáticos griegos habían desarrollado hasta ese momento y los expuso de manera ordenada. Sus demostraciones geométricas se basaban en el método deductivo, lo que garantizaba la validez de sus afirmaciones.
Euclides comenzó su obra definiendo los objetos con los que iba a trabajar, después estableció las reglas generales con que esos objetos se relacionaban es decir los postulados y a continuación enuncio propiedades generales sobre la igualdad de magnitudes llamadas nociones comunes. Cabe destacar que los axiomas de Euclides no cumplen con la condición de ser completos, sin embargo, a partir de ellos se puede construir gran parte de la teoría geométrica que hoy se estudia.
Para hablar del quinto postulado necesitamos presentar un concepto nuevo.
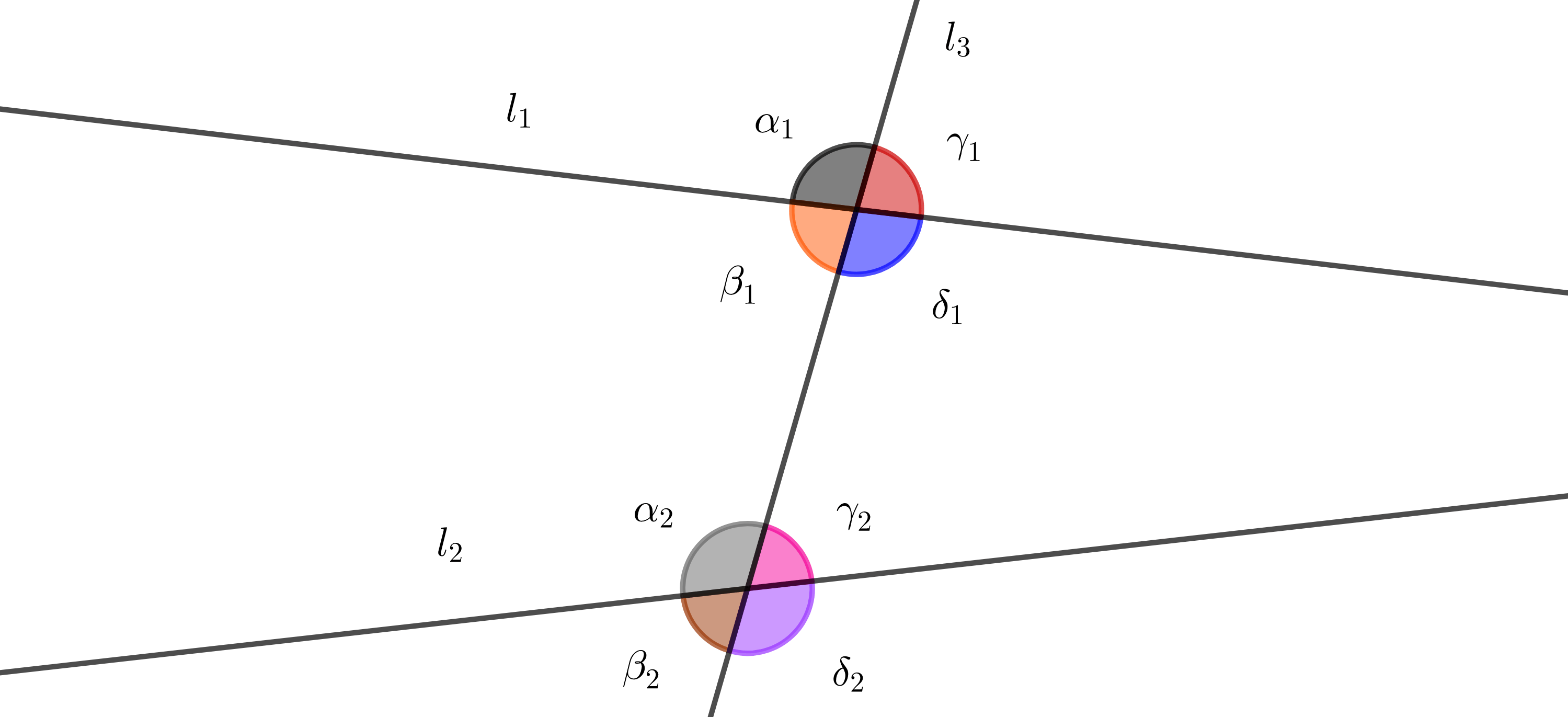
Definición. Consideremos $l_{1}$, $l_{2}$ y $l_{3}$ tres rectas distintas y tal que $l_{3}$ interseca a las primeras dos, entonces decimos que $l_{3}$ es transversal a $l_{1}$ y a $l_{2}$.
En estas condiciones se forman 8 ángulos (figura 1), decimos que $\alpha_{2}$, $\beta_{1}$, $\delta_{1}$ y $\gamma_{2}$ son ángulos internos.
Las parejas de ángulos ($\alpha_{1}$, $\alpha_{2}$), ($\beta_{1}$, $\beta_{2}$), ($\delta_{1}$, $\delta_{2}$) y ($\gamma_{1}$, $\gamma_{2}$) se llaman ángulos correspondientes, y las parejas de ángulos ($\beta_{1}$, $\gamma_{2}$) y ($\delta_{1}$, $\alpha_{2}$) son ángulos alternos internos.
Figura 1
A continuación enunciamos los cinco postulados de Euclides.
$i)$ Por dos puntos siempre es posible trazar una recta.
$ii)$ Es posible prolongar una recta tanto como se quiera en cualquiera de sus dos direcciones.
$iii)$ Cualquier punto del plano y segmento pueden ser usados como centro y radio, respectivamente de un círculo.
$iv)$ Todos los ángulos rectos son iguales.
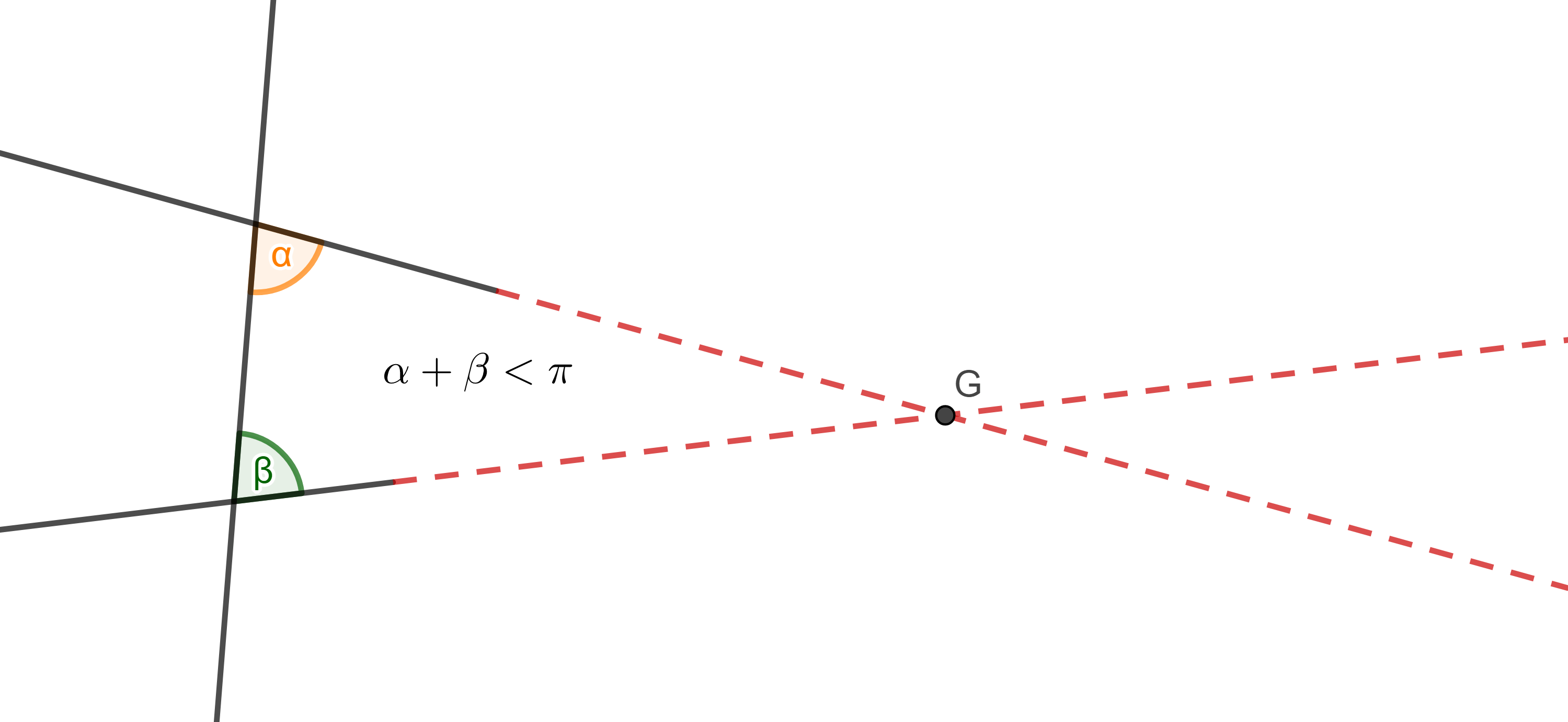
$v)$ Si por dos rectas pasa una transversal tal que, de alguno de los lados de la transversal, la suma de los ángulos interiores es menor a dos ángulos rectos, entonces si las dos rectas se prolongan lo suficientemente del lado en que dicha suma es menor a 2 ángulos rectos, las rectas se intersecan.
Figura 2
Nociones comunes
Las nociones comunes que enunció Euclides también son axiomas que se refieren al manejo de magnitudes del mismo tipo.
$i)$ Cosas que sean iguales a una tercera son iguales entre sí. Si $a = c$ y $c = b$ entonces $a = b$.
$ii)$ Si a cosas iguales se añaden cosas iguales las resultantes son iguales. Si $a = b$ entonces $a + c = b + c$.
$iii)$ Si de cosas iguales se substraen cosas iguales las resultantes son iguales. Si $a = b$ entonces $a – c = b – c$.
$iv)$ Cosas que coinciden una con otra son iguales entre sí. Esto se refiere, por ejemplo, a la superposición de objetos, es decir, si al superponer dos objetos estos coinciden, entonces tendrán las mismas magnitudes.
$v)$ El todo es mayor que cualquiera de sus partes. Si $a$ y $b$ son positivos y $c = a + b$ entonces $c > a$ y $c > b$.
Hay otras nociones que también usamos frecuentemente, por ejemplo, las primeras tres nociones se preservan si usamos desigualdades.
$vi)$ Si $a > c$ y $c > b$ entonces $a > b$.
$vii)$ Si $a > b$ entonces $a + c > b + c$.
$viii)$ Si $a > b$ entonces $a – c > b – c$.
En las últimas tres nociones, podemos cambiar el mayor que ($>$) por menor que ($<$), mayor igual que ($\geq$) o menor igual que ($\leq$).
$ix)$ Tricotomía. Para $a$ y $b$ magnitudes del mismo tipo ocurre uno y solo uno de los siguientes casos: $a = b$, $a < b$, $b < a$.
El quinto postulado y sus consecuencias
Como podemos apreciar, los primeros cuatro postulados son aseveraciones intuitivas mientras que el quinto está enunciado de una forma que parece establecer condiciones a partir de las cuales ocurre algo, esto causo mucha controversia por más de dos mil años, pues aparenta ser una proposición que debe ser demostrada.
Hubo numerosos intentos por demostrar el quinto postulado conocido como axioma de las paralelas. Como resultado se encontraron varias equivalencias, se llegó a la conclusión de que no era posible demostrar el quinto postulado a partir de los cuatro primeros y que además era posible aceptar otros axiomas como ciertos en lugar del quinto, lo que dio origen a las geometrías no euclidianas.
Proposición. El quinto postulado de Euclides es equivalente a la afirmación los ángulos alternos internos entre paralelas son iguales.
Demostración: Seguiremos el método de reducción al absurdo. La idea es suponer que dada una hipótesis no se cumple la tesis de la proposición y a partir de ahí tenemos que encontrar algún tipo de contradicción a algo que sabemos que si es cierto.
Primero asumimos como cierto el quinto postulado y debemos mostrar que dadas dos rectas paralelas y una transversal a ella los ángulos alternos internos son iguales.
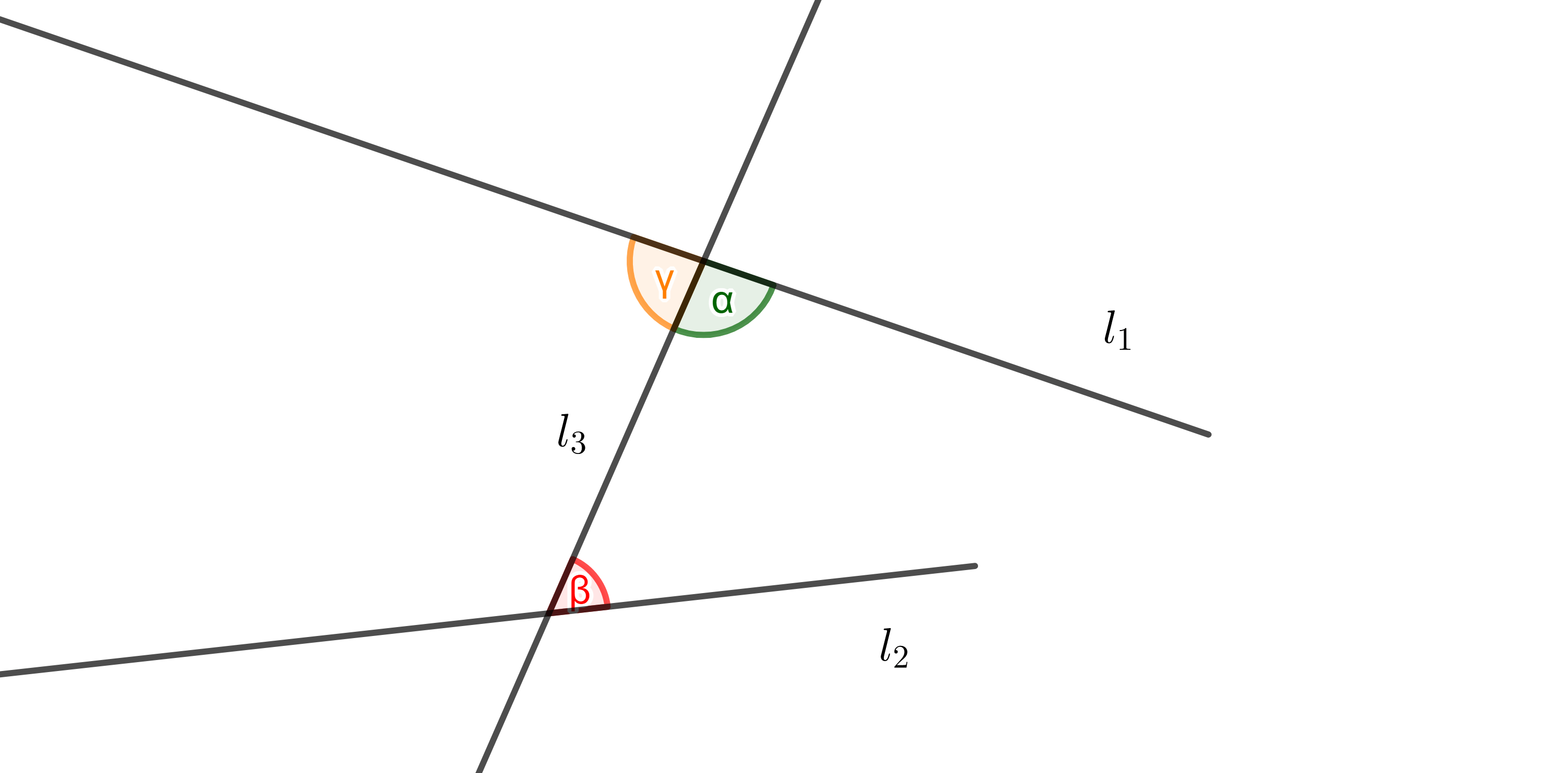
Sean $l_{1}$ y $l_{2}$ las rectas paralelas y $l_{3}$ la transversal a ellas y supongamos que los ángulos alternos internos $\alpha$ y $\beta$ no son iguales, entonces por tricotomía uno es mayor que el otro.
Figura 3
Sin pérdida de generalidad supongamos que $\beta > \alpha$, podemos sumar a ambos lados de la desigualdad $\gamma$, el ángulo suplementario de $\beta$, entonces $\pi = \beta + \gamma > \alpha + \gamma$ $\Rightarrow$ $\pi > \alpha + \gamma$.
Entonces por el quinto axioma de Euclides las rectas se cortan, lo cual es una contradicción al hecho de que las rectas son paralelas. Así, nuestra suposición de que los ángulos alternos internos eran diferentes es errónea, y por lo tanto, los ángulos alternos internos son iguales $\alpha = \beta$.
$\blacksquare$
Ahora tomemos por cierto que los ángulos alternos internos entre paralelas son iguales y mostremos que si de un lado de una transversal que corta a dos rectas la suma de los ángulos internos es menor que dos ángulos rectos entonces dichas rectas se cortan en algún punto.
Demostración. Sea $l_{3}$, transversal a $l_{1}$ y $l_{2}$ y tal que la suma de los ángulos $\alpha + \beta < \pi$, supongamos que las rectas $l_{1}$ y $l_{2}$ son paralelas, por hipótesis sabemos que los ángulos alternos internos son iguales, $\beta = \gamma$.
Figura 4
Pero $\gamma$ y $\alpha$ son suplementarios , entonces $\pi = \alpha + \gamma = \alpha + \beta$.
Lo que es una contradicción pues nuestra hipótesis era que la suma de los ángulos era menor que dos ángulos rectos. Por lo tanto, las rectas se cortarán en algún punto.
$\blacksquare$
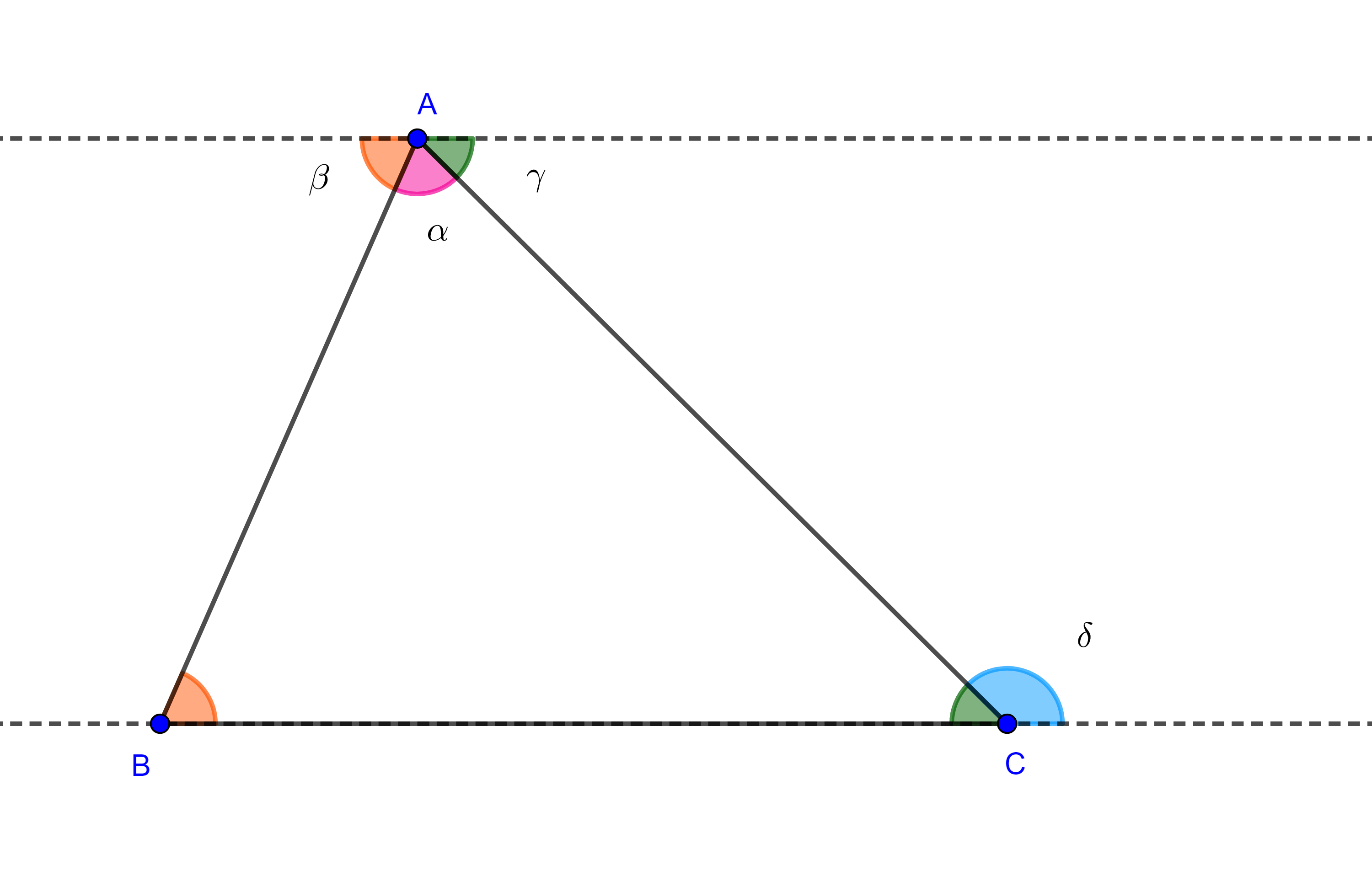
Teorema. La suma de los ángulos internos de todo triángulo es igual a dos ángulos rectos, además un ángulo exterior de un triángulo es igual a la suma de los ángulos internos no adyacentes a el.
Demostración. Sea $\triangle ABC$ un triángulo, y sea $\angle BAC = \alpha$. Consideremos la recta paralela a $BC$ que pasa por $A$.
Figura 5
Entonces por la proposición anterior, $\angle CBA = \beta$ y $\angle ACB = \gamma$ (figura 5), pues son ángulos alternos internos entre paralelas.
Por lo tanto, $\angle BAC + \angle CBA + \angle ACB = \alpha + \beta + \gamma = \pi$.
Por otra parte, sea $\delta$ el ángulo exterior en $C$, entonces $\gamma$ y $\delta$ son ángulos suplementarios, así que $\gamma + \delta = \pi = \alpha + \beta + \gamma$ $\Leftrightarrow \delta = \alpha + \beta = \angle BAC + \angle CBA$.
$\blacksquare$
Más adelante…
En la siguiente entrada hablaremos de las transformaciones rígidas y estudiaremos los criterios de congruencia una herramienta muy útil en geometría.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Prueba que los ángulos correspondientes entre paralelas son iguales entre sí.
Dados una recta y un punto fuera de ella muestra que la paralela a la recta dada por el punto dado es única.
Sea $l_{3}$ transversal a $l_{1}$ y $l_{2}$ muestra que si los ángulos alternos internos son iguales entonces $l_{1}$ y $l_{2}$ son paralelas.
$i)$ Muestra que dos rectas que son paralelas a una tercera son paralelas entre si. $ii)$ Muestra que dos rectas que son perpendiculares a una tercera son paralelas entre si.
$i)$ Dados una recta y un punto fuera de ella muestra que la perpendicular a la recta dada por el punto dado es única. $ii)$ Dados una recta y un punto en ella muestra que la perpendicular a la recta dada por el punto dado es única.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En entradas anteriores hemos definido las rectas en formas distintas y hemos realizado algunos ejercicios. El siguiente paso en nuestro curso es definir la noción de paralelismo y su relación con la intersección de rectas. Buscamos esto ya que no hay que olvidar que uno de nuestros objetivos más importantes es ver que desde nuestro modelo analítico podemos recuperar los postulados euclideanos.
Comenzaremos enunciando las nociones básicas de paralelismo. Luego hablaremos de intersección de rectas. De manera intuitiva, podemos imaginar que el punto de intersección de dos rectas es aquel que cumple con la ecuación de cada una al mismo tiempo ; esta idea será nuestra guía para desarrollar la teoría. Una vez que hayamos razonado este tema, volveremos para concluir la parte de paralelismo.
Paralelismo
Comencemos con la siguiente definición.
Definición. Dos rectas $l_1$ y $l_2$ $\in \mathbb{R}^2$ son paralelas si o bien son la misma, o bien no se intersectan, esto es que
$l_1 \cap l_2 = \emptyset,$
en donde $\emptyset$ denota al conjunto vacío. En símbolos, escribiremos $l_1 \parallel l_2$.
También es posible dar una definición de paralelismo para vectores.
Definición. Dados dos vectores $u,v \in \mathbb{R}^2$ distintos de $0$, decimos que $u$ es paralelo a $v$ si existe un número real $t$ tal que
$u=tv$
En símbolos, escribiremos $u \parallel v$.
Estas nociones parecen distintas, sin embargo hay un resultado crucial que las conecta: dos rectas serán paralelas si y sólo si al escribirlas en forma paramétrica tenemos que sus vectores dirección son paralelos. Aún no tenemos la teoría suficiente para demostrar este resultado por completo, pero ya podemos demostrar una parte.
Lema. Tomemos dos rectas con las siguientes expresiones en forma paramétrica:
$l=\{ p+rq : r \in \mathbb{R} \}$ y $m= \{ u+sv : r \in \mathbb{R} \}.$
Si $q$ y $v$ son paralelos, entonces las rectas son paralelas.
Demostración. Comencemos suponiendo que los vectores son paralelos por lo que debemos demostrar que $l\cap m =\emptyset$.
Si $q$ y $v$ son paralelos, entonces existe un $t \in \mathbb{R}$ tal que $q=tv$. Supongamos que la intersección de $l$ y $m$ es no vacía. Para ver que son paralelas debemos probar entonces que son la misma. Un punto en ambas nos daría la igualdad $$u+sv=p+rq$$ para algunos valores de $s$ y $r$.
Recordemos que por hipótesis $q=tv$, por lo que al sustituir este valor en la igualdad anterior tenemos $$u+sv=p+r(tv),$$ de donde $$u-p=rtv-sv.$$
Afortunadamente, ya sabemos como resolver sistemas de ecuaciones. En este caso en especial, podemos multiplicar la ecuación $a$ por $-2$ para obtener $10=-2s+14r$ y sumar este resultado a la ecuación $b$:
En este punto, debemos solucionar el sistema de ecuaciones de manera general, para lo cual multiplicaremos $(a)$ por $q_2$ y $(b)$ opr $q_1$ y restaremos las expresiones resultantes
\begin{align*} rq_1q_2-sv_1q_2&=u_1q_2-p_1q_2 \\ rq_2q_1-sv_2q_1&=u_2q_1-p_2q_1\\ \hline sv_2q_1-sv_1q_2&=u_1q_2-p_1q_2-u_2q_1+p_2q_1 \end{align*} A partir de esta última expresión podemos despejar el parámetro $s$ para obtener
Notemos que $s$ se puede indefinir si $v_2q_1-v_1q_2=0$, esto es que
$v_2q_1=v_1q_2$
pero la única manera de que esto suceda es si $l_1 \parallel l_2$, que no es el caso que estamos tratando. Por lo tanto, el sistema siempre tiene solución. Así, el punto de intersección $w$ está dado por
Es posible encontrar el punto $w$ al encontrar el valor del parámetro $r$ y es de manera análoga a lo que acabamos de realizar.
Recapitulemos ligeramente lo que acaba de pasar, pues acabamos de demostrar la parte faltante del lema enunciado en la sección de paralelismo. Por lo descrito arriba, resulta que si las rectas son paralelas, entonces no hay un punto de intersección, esto es que el sistema de ecuaciones no tiene solución, pero esto pasa solamente si los vectores son paralelos.
$\square$
Podemos enunciar esto último como el lema que es el «regreso» del lema de la sección anterior.
Lema. Si los vectores directores de dos rectas en su forma paramétrica no son paralelos, entonces las rectas se intersectan en un único punto.
El quinto postulado
Concluyamos esta entrada con la demostración del quinto postulado.
Teorema. Dada una recta $l \in \mathbb{R}^2$ y un punto $P$ fuera de ella, siempre existe una única recta $m$ que pasa por $P$ y es paralela a $l$.
Demostración. Escribamos a la recta $l$ en forma paramétrica:
$l=\{ U+rV : r \in \mathbb{R} \}.$
Proponemos a la recta
$m=\{ P+rV : r \in \mathbb{R} \}.$
como una recta que pasa por $P$ y es paralela a $l$. Por como $m$ está definida, esta recta cumple que pasa por $P$ (tomando $r=0$). Además, sabemos que $1\dot V=V$, por lo que (por definición de vectores paralelos) $V$ es paralelo a $V$ y esto implica que $m$ es paralela a $l$ (por el lema).
De esta manera, logramos construir una recta por $P$ y paralela a $l$.
Para demostrar la unicidad, supongamos que hay otra recta $m’$ paralela a $l$ y que pasa por $P$. Como $m’$ es paralela a $l$ y $l$ es paralela a $m$, tenemos que $m’$ es paralela a $m$ (ver Tarea Moral). Dos rectas son paralelas o bien si no se intersectan, o bien si son iguales. Como $m’$ y $m$ tienen ambas al punto $P$ debe sucede lo segundo, es decir, que sean iguales.
$\square$
Más adelante…
En esta entrada tratamos la intersección de rectas en su forma paramétrica. Conforme avancemos en el curso, hablaremos de las rectas en otras formas a partir de las cuales también nos será posible encontrar su intersección. Hasta ahora hemos demostrado los postulados 1, 3 y 5. Necesitamos algunas definiciones y teoría adicional para poder demostrar los postulados 2 y 4.
Tarea moral
Demuestra que «ser paralela a» es una relación de equivalencia entre rectas. Demuestra que «ser paralelo a» es una relación de equivalencia entre vectores.
En el desarrollo general para encontrar la intersección de dos rectas, existe un caso en el que el sistema de ecuaciones no tiene solución, esto es cuando $v_2q_1-v_1q_2=0$. Justifica porqué este caso no es posible a partir de las hipótesis dadas.
Encuentra el parámetro $r$ en la sección antes mencionada, para encontrar a $w$ en términos de la otra recta.
Encuentra las intersecciones de cada pareja de las siguientes las rectas
$l_1=\{ (3,2)+t(2,0) : t \in \mathbb{R} \}$
$l_2=\{ (5,1)+s(-4,3) : s \in \mathbb{R} \}$
$l_3=\{ (-6,-1)+r(0,-7) : r \in \mathbb{R} \}$
Prueba que las rectas $l=\{(-1,5)+t(4,-2) : t \in \mathbb{R}\}$ y $m=\{ (0,2)+s(-20,10) : s \in \mathbb{R} \}$ son paralelas.
En la entrada anterior estudiamos la triangularización de matrices, que consistía en llevar matrices a una forma triangular superior. En esta fortaleceremos esta idea, y buscaremos maneras de llevar una matriz a una matriz diagonal: a este proceso se le conoce como diagonalizar.
Matrices y transformaciones diagonalizables
A lo largo de esta sección fijamos $F$ un campo. Todos los espacios vectoriales se asumirán de dimensión finita.
Definición. Una matriz $A\in M_n(F)$ es llamada diagonalizable si es similar a una matriz diagonal en $M_n(F)$.
Una transformación lineal $T:V\to V$ sobre un espacio vectorial $V$ se llama diagonalizable si existe una base de $V$ tal que la matriz de $T$ respecto a esa base sea diagonal.
Es decir una matriz $A\in M_n(F)$ es diagonalizable si y sólo si podemos escribir
\begin{align*} A=PDP^{-1} \end{align*}
para alguna matriz invertible $P\in M_n(F)$ y una matriz diagonal $D=[d_{ij}]\in M_n(F)$. Nota que la definición implica que cualquier matriz similar a una matriz diagonalizable es a su vez diagonalizable. De misma manera, una transformación lineal es diagonalizable si su representación esdiagonalizable respecto a cualquier base (aunque no será necesariamente diagonal en cualquier base).
Damos la siguiente caracterización de transformaciones diagonalizables.
Teorema. Una transformación lineal $T:V\to V$ es diagonalizable si y sólo si $V$ tiene una base compuesta por eigenvectores de $T$.
Demostración. Supongamos que $T$ es diagonalizable. Por tanto existe una base $v_1,\dots, v_n$ de $V$ tal que la matriz asociada a $T$ en esta base es diagonal. Si $(a_{ii})_{i=1}^{n}$ son las entradas diagonales de $A$, entonces por definición $T(v_{i})=a_{ii} v_i$ para todo $i=1,\dots, n$. Luego $v_1,\dots, v_n$ es una base de $V$ compuesta por eigenvectores de $T$.
Conversamente, supongamos que $T$ tiene una base $v_1,\dots, v_n$ compuesta por eigenvectores de $T$. Si $T(v_i)=d_i v_i$ entonces la matriz respecto a $v_1,\dots, v_n$ de $T$ es diagonal con entradas $d_i$.
$\square$
Primeras propiedades
Tenemos dos observaciones inmediatas.
Observación. El teorema nos proporciona una manera de diagonalizar explícitamente una matriz. Si $A\in M_n(F)$ es diagonalizable, entonces encontramos una base de $V=F^n$ formada por eigenvectores y los acomodamos como columnas de una matriz $P$. Entonces $P^{-1}AP=D$ es diagonal y $A=PDP^{-1}$.
Observación. Supongamos que $A$ es diagonalizable y que $A=PDP^{-1}$ para alguna matriz diagonal $D$ y una matriz invertible $P$.
El polinomio característico de $A$ y de $D$ es el mismo, puesto que son matrices similares. De esto deducimos que \begin{align*} \prod_{i=1}^{n}(X-d_{ii})=\chi_{A}(X). \end{align*} En particular, los eigenvalores de $A$ son las entradas diagonales de $D$ (contados con multiplicidad).
Sea $\lambda\in F$ un eigenvalor de $A$. Entonces la multiplicidad algebraica es igual al número de índices $i=1,\dots, n$ tales que $d_{ii}=\lambda$ (esto por el inciso anterior). Por otro lado, la dimensión geométrica de $\lambda$ como eigenvalor de $A$ o $D$ es la misma puesto que la asignación $X\mapsto P^{-1}X$ induce un isomorfismo entre $\ker(\lambda I_n-A)$ y $\ker(\lambda I_n-D)$. Pero además la multiplicidad geométrica de $\lambda$ como eigenvalor de $D$ también coincide con el número de índices $i=1,\dots, n$ tales que $\lambda_{ii}=n$, ya que el sistema $DX=\lambda X$ es equivalente a $(d_{ii}-\lambda )x_i=0$. Concluimos que en una matriz diagonalizable, la multiplicidad algebraíca y la multiplicidad geométrica coinciden.
Un par de problemas
A continuación resolvemos un par de problemas: el primero sirve para aplicar lo que hemos visto hasta ahora, y el segundo nos será útil más adelante.
Solución. Supongamos que $A$ es diagonalizable y escribamos $A=PDP^{-1}$ con $P$ invertible y $D$ diagonal. Como $A$ es triangular superior con entradas diagonales iguales a $1$, deducimos que $1$ es el único eigenvalor de $A$. Por la observación anterior tenemos que las entradas diagonales de $D$ son $1$, por tanto $D=I_n$. Pero entonces $A=PI_nP^{-1}=I_n$ una contradicción si $a\neq 0$.
$\square$
El siguiente problema es más técnico, y nos servirá para demostrar uno de los teoremas fundamentales que caracteriza a las matrices diagonalizables.
Problema 2. Sea $k>1$ y sean $P_1,\dots, P_k$ polinomios primos relativos dos a dos. Si $P=P_1\cdot P_2\cdots P_k$ es su producto y $Q_i=\frac{P}{P_i}$, demuestra que los $Q_1,\dots, Q_k$ son primos relativos (es decir, no existe un polinomio que los divida a todos simultáneamente).
Solución. Supongamos que existe un polinomio $Q$ irreducible que divide a todos los $Q_i$. Puesto que $Q\mid Q_1=P_2\cdots P_k$ deducimos que $Q$ divide a $P_j$ para algún $j\in \{2,\dots, k\}$. Pero como $Q$ divide también a $Q_j$, esto quiere decir que $Q$ divide a $P_i$ para algún $i\neq j$, lo que contradice que los $P_i$ son primos relativos dos a dos.
$\square$
Un teorema de descomposición
Terminamos esta entrada con un teorema algo técnico que será de mucha utilidad en la próxima entrada, cuando caractericemos a las matrices diagonalizables.
Teorema. Sea $T$ una transformación lineal de algún espacio $V$ en si mismo (no necesariamente de dimensión finita). Entonces para cualesquiera polinomios $P_1,\dots, P_k\in F[X]$ primos relativos dos a dos se cumple que
Demostración. Consideramos a los polinomios $Q_i=\frac{P}{P_i}$ como en el problema anterior. Como son primos relativos, el teorema de Bezout nos dice que existen polinomios $R_1,\dots, R_k$ tales que
Como $P_i$ divide a $P$, se sigue que $\ker P_i(T)\subset \ker P(T)$ para todo $i\in \{1,\dots, k\}$. Por otro lado si $x\in \ker P(T)$ y escribimos $x_i=(Q_i R_i)(T)(x)$, la relación anterior nos dice que
\begin{align*} x=x_1+\dots+x_k \end{align*}
Más aún $P_i(T)(x_i)=(P_i Q_i R_i)(T)(x)$ y $P_iQ_i R_i$ es un múltiplo de $P$. Dado que $x\in \ker P(T)\subset \ker(P_i Q_i R_i)(T)$, se sigue que $x_i\in \ker P_i(T)$, y como $x=x_1+\dots +x_k$ concluimos que
Pero $Q_1(T)(x_2)=\dots= Q_1(T)(x_k)=0$ dado que $Q_1$ es un múltiplo de $P_2,\dots, P_k$ y $P_2(T)(x_2)=\dots=P_k(T)(x_k)=0$. Entonces $Q_1(T)(x)=0$ y similarmente $Q_j(T)(x_j)=0$ para $j\in \{1,\dots, k\}$. Pero entonces
y similarmente se demuestra que $x_2=\dots =x_k=0$. Queda demostrado el teorema.
$\square$
Más adelante…
En la próxima entrada usaremos lo demostrado en esta entrada para dar una caracterización de las matrices diagonalizables, como hicimos con las matrices triangularizables.
Tarea moral
Estos ejercicios no forman parte de la evaluación del curso, pero son útiles para practicar los conceptos vistos en esta entrada.
Sea $V$ un espacio vectorial de dimensión finita y $T:V\to V$ lineal. Demuestra que si $T$ es diagonalizable, entonces $T^2$ también lo es y además $\ker T=\ker T^2$.
Sean $A,B\in M_n(F)$ dos matrices tales que $A$ es invertible y $AB$ es diagonalizable. Demuestra que $BA$ también lo es.
Sea $A\in M_n(\mathbb{C})$ tal que existe $d>0$ con $A^{d}=I_n$. Demuestra que $A$ es diagonalizable.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»