En esta nueva entrada veremos el concepto de relación, para lo cual es necesario tener fresco el concepto de producto cartesiano. Así mismo, definiremos nuevos conjuntos a partir de una relación, como lo son el dominio, la imagen de una relación, la imagen de un conjunto bajo una relación y el concepto de relación inversa. Concluiremos esta entrada definiendo a la imagen inversa de un conjunto bajo una relación.
Relación
Definición. Sean $A$ y $B$ conjuntos. Una relación $R$ de $A$ en $B$ es un subconjunto de $A\times B$. A $A$ le llamamos el dominio de la relación y a $B$ el codominio.
Si $A=B$ diremos que $R$ es una relación en $A$.
Ejemplo 1.
Sea $A=\set{\emptyset,\set{\emptyset}}$ y $B=\set{\emptyset, \set{\set{\emptyset}}}$ y definimos $R$ como:
Dado que $A\times B=\set{(\emptyset,\emptyset), (\emptyset, \set{\set{\emptyset}}), (\set{\emptyset}, \emptyset), (\set{\emptyset}, \set{\set{\emptyset}})}$ y $R\subseteq A\times B$ decimos que $R$ es una relación de $A$ en $B$.
$\square$
Ejemplo 2.
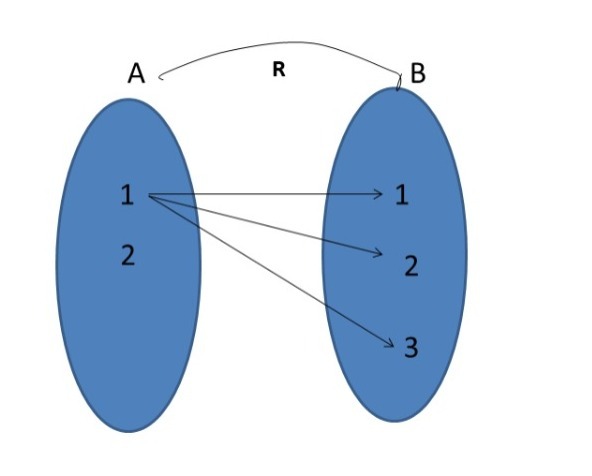
Sea $A=\set{1,2}$ y $B=\set{1,2,3}$. Definimos $S=\set{(1,1), (1,2), (1,3)}$. Tenemos que $S$ es una relación de $A$ en $B$. En efecto, esto sucede pues $S=\set{(1,1), (1,2), (1,3)}\subseteq A\times B$, ya que $A\times B=\set{(1,1), (1,2), (1,3), (2,1), (2,2), (2,3)}$.
Podemos representar a $S$ mediante el siguiente diagrama. Del lado izquierdo hemos puesto al dominio $A$. Del lado derecho al codominio $B$. Para cada pareja $(a,b)$ de la relación, hemos puesto una flecha de $a$ a $b$.
$\square$
Definición. Si $(x,y)\in R$ con $R$ relación, decimos que $x$ está relacionado con $y$ mediante $R$ (o simplemente que $x$ está relacionado con $y$ si por el contexto es claro quién es $y$) y lo denotaremos como $xRy$.
Si retomamos el Ejemplo 1 podemos decir que $\emptyset R\emptyset$ y $\emptyset R\set{\set{\emptyset}}$.
A partir del Ejemplo 2 podemos decir que $1S1$, $1S2$ y $1S3$.
Relaciones relevantes
A continuación hablaremos de algunos ejemplos de relaciones que nos serán de utilidad más adelante.
Relación vacía. Si $R=\emptyset$, entonces $R$ será llamada la relación vacía. Esto tiene sentido pues $\emptyset\subseteq A\times B$ para cualesquiera $A$ y $B$ conjuntos.
Relación identidad. Sea $A$ un conjunto cualquiera. Definimos la relación identidad en $A$ como: $$Id_{A}=\set{(a,a):a\in A}.$$ Notamos que $Id_{A}\subseteq A\times A$ pues para cualquier $(x,y)\in Id_{A}$ se tiene que $x=y$ con $x,y\in A$, lo que significa que $(x,y)\in A\times A$.
Relación de pertenencia. Sea $A$ un conjunto. Definimos a la relación de pertenencia en $A$ como el siguiente conjunto: $$\in_{A}=\set{(a,b): a\in A,\ b\in A,\ a\in b}.$$
Relación de contención. Sea $A$ un conjunto. Definimos a la relación de contención en $A$ como el siguiente conjunto: $$\subseteq_{A}=\set{(a,b): a\in A,\ b\in A,\ a\subseteq b}.$$
Dominio de una relación
Ya que hemos definido el concepto de relación de $A$ en $B$, a continuación definiremos al dominio de una relación.
Definición. Sea $R$ una relación de $A$ en $B$. Definimos el dominio de la relación como:
Sean $A=B=\set{1,2}$. Definimos $R=\set{(1,2), (1,1), (2,2)}\subseteq A\times B$. Tenemos que $\text{dom}(R)=\set{1,2}$ pues para $1\in A$ existe, digamos, $1\in B$ tal que $(1,1)\in R$ y para $2\in A$ existe $2\in B$ tal que $(2,2)\in R$.
$\square$
Imagen de una relación
A continuación vamos a definir lo análogo al dominio activo, pero para el codominio. Le daremos un nombre al subconjunto de elementos del codominio que sí participan en la relación.
Definición. Sea $R$ una relación de $A$ en $B$. Definimos la imagen de $R$ como el conjunto
Sean $A=B=\set{1,2}$. Definimos $R=\set{(1,2), (2,2)}\subseteq A\times B$.
Tenemos que $\text{im}(R)=\set{2}$ pues para $2\in B$ existe, digamos $2\in A$ tal que $(2,2)\in R$. Sin embargo, $1\not \in \text{im}(R)$ pues $R$ no tiene ninguna pareja de la forma $(x,1)$ con $x\in A$.
$\square$
Imagen de un conjunto bajo una relación
A veces queremos preguntarnos por los elementos del codominio que participan en la relación, pero sólamente con ciertos elementos del dominio. La siguiente definición establece esto.
Definición. Sea $R$ una relación de $A$ en $B$. Sea $C\subseteq A$. Definimos a la imagen de $C$ bajo $R$ como el el conjunto
$R[C]=\set{y\in B: \exists x\in C (xRy)}$.
Ejemplo.
Sean $A=\set{1,2}$ y $B=\set{1,2,3,4}$ conjuntos. Sea $R=\set{(1,1), (1,3), (2,1), (2,2), (2,4)}$, la cual es una relación de $A$ en $B$. Tomemos $C=\set{1}\subseteq A$. Tenemos que
Para cerrar esta entrada, introduciremos un concepto más: el de relación inversa.
Definición. Sean $A$ y $B$ conjuntos. Sea $R$ una relación de $A$ en $B$. Definimos la relación inversa de $R$ como la relación $R^{-1}$ de $B$ en $A$ definida como sigue:
$R^{-1}=\set{(b,a): (a,b)\in R}$.
Notemos que la relación inversa intercambia el orden de las entradas de las parejas ordenadas que son elementos de la relación $R$.
Ejemplo.
Sea $A=\set{\emptyset}$ y $B=\set{\emptyset, \set{\emptyset}}$ y definimos $R$ como:
En efecto, como $(\emptyset, \emptyset)\in R$ tendremos que $(\emptyset, \emptyset)\in R^{-1}$ y como $(\set{\emptyset}, \emptyset)\in R$ tendremos que $(\emptyset, \set{\emptyset})\in R^{-1}$.
$\square$
Proposición. Sea $R$ una relación. Se cumple que $(R^{-1})^{-1}=R$.
Definición. Sea $R$ una relación de $A$ en $B$. Sea $C\subseteq B$. Definimos a la imagen inversa de $C$ bajo $R$ como el el conjunto
$R^{-1}[C]=\set{x\in A: \exists y\in C (xRy)}$.
Ejemplo.
Sean $A=\set{1,2}$ y $B=\set{1,2,3,4}$ conjuntos. Si $R=\set{(1,1), (1,3), (2,1), (2,2), (2,4)}$ es una relación de $A$ en $B$, entonces $R^{-1}=\{(1,1), (1,2), (2,2), (3,1), (4,2)\}$. Tomemos $C=\set{1}\subseteq B$. Tenemos que
La siguiente lista de ejercicios te permitira reforzar los conceptos de relación, dominio activo e imagen.
Si $R$ es la relación vacía, encuentra el dominio y la imagen de $R$.
Para $R$ es la relación identidad de $A$, encuentra el dominio y la imagen de $R$.
Sea $R=\set{(1,2), (3,4)}$ una relación de $A=\set{1,2,3}$ en $B=\set{1,2,3,4}$. Encuentra el dominio y la imagen de $R$. Además, escribe al conjunto $R^{-1}$.
Si $R$ es la relación identidad de $A$, describe quién es $R^{-1}$.
Más adelante…
En la siguiente entrada continuaremos con el tema de relaciones. Esta vez trataremos el tema de composición de relaciones. Definiremos a la composición de relaciones como una relación que se construye a partir de al menos dos relaciones cuyos dominios y codominios tienen ciertas propiedades en común.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
Profundiza lo suficiente en cualquier cosay encontrarás las matemáticas. – Dean Schlicter
Introducción
En la entrada anterior comenzamos a desarrollar formalmente la teoría cualitativa de las ecuaciones diferenciales, en particular estudiamos algunos sistemas lineales y no lineales autónomos planos, es decir, con dos ecuaciones diferenciales.
Ahora sabemos cómo obtener un bosquejo del campo vectorial asociado al sistema y dibujar algunas trayectorias de forma tangente a los vectores, esto sin siquiera conocer explícitamente las soluciones del sistema. También sabemos identificar los puntos de equilibrio de un sistema y clasificarlos como estables, asintóticamente estables o inestables. Según sea la naturaleza del punto de equilibrio tendremos más información sobre las soluciones del sistema, al menos de forma cualitativa.
En esta entrada haremos un análisis más detallado sobre las trayectorias que se forman en el plano fase y que representan soluciones particulares del sistema. Veremos, además, una forma relativamente sencilla de obtener las trayectorias sin apoyarnos del campo vectorial asociado y es ¡resolviendo una ecuación de primer orden!.
Trayectorias de un sistema autónomo
Recordemos que los sistemas que estamos estudiando son de la forma
Hasta ahora en el plano fase hemos trazado trayectorias descritas por las soluciones de un sistema autónomo guiándonos por el campo vectorial asociado. En esta ocasión desarrollaremos otro método para obtenerlas y es resolviendo una ecuación de primer orden.
Supongamos que
$$Y(t) = (x(t), y(t)) \label{2} \tag{2}$$
es una solución del sistema (\ref{1}) que no permanece constante en el tiempo, es decir, que no se trata de una solución de equilibrio y además la derivada $\dfrac{dx}{dt}$ es distinta de cero en $t = t_{0}$, entonces en un entorno del punto $x_{1} = x(t_{0})$ se verifica que
En el caso en el que $\dfrac{dx}{dt}$ sea cero para todo $t$, se tendrá que verificar que $\dfrac{dy}{dt}$ no siempre sea nula, por lo que la trayectoria de esa solución verifica, análogamente, la ecuación diferencial
En cualquier caso, las trayectorias se podrán determinar resolviendo una ecuación diferencial de primer orden.
Más adelante veremos algunos ejemplos.
Propiedades cualitativas de las trayectorias
Las propiedades cualitativas de las trayectorias nos permiten obtener información sobre el comportamiento de las soluciones. Algunas de las propiedades más importantes se enuncian a continuación.
Cada trayectoria del plano fase representa infinitas soluciones del sistema autónomo.
Teorema: Supongamos que $Y(t) = (x(t), y(t))$ es solución del sistema (\ref{1}), entonces para cada $c \in \mathbb{R}$ se tiene que $$\hat{Y}(t) = (\hat{x}(t), \hat{y}(t)) = (x(t + c), y(t + c)) = Y(t + c) \label{5} \tag{5}$$ es otra solución de (\ref{1}).
Demostración: Sea $Y(t) = (x(t), y(t))$ una solución de (\ref{1}), entonces se cumple que
Por lo tanto, la función $\hat{Y}(t) = Y(t + c)$ es otra solución del sistema.
$\square$
Este teorema es valido para cada $c \in \mathbb{R}$ lo que muestra que cada una de las trayectorias del plano fase puede representar infinitas soluciones del sistema.
Por ejemplo, una solución del sistema
\begin{align*} x^{\prime} &= y \\ y^{\prime} &= 2xy \end{align*}
también son solución del mismo sistema y ambas trazan la misma trayectoria en el plano fase, sin embargo no coinciden en el mismo punto al momento de evaluar en $t = t_{0}$.
Para el caso lineal se puede verificar explícitamente el teorema anterior.
Sea $\mathbf{Y}^{\prime} = \mathbf{AY}$ un sistema lineal, sabemos que toda solución $\mathbf{Y}(t)$ de esta ecuación es de la forma
para cualesquiera valores de $t$ y $c$. Sea el vector constante $\mathbf{C} = e^{\mathbf{A}c}\mathbf{K}$, entonces la solución anterior se puede escribir como
$$\mathbf{Y}(t + c) = e^{\mathbf{A}t} \mathbf{C} \label{11} \tag{11}$$
Por lo tanto, $\mathbf{Y}(t + c)$ es también una solución de $\mathbf{Y}^{\prime} = \mathbf{AY}$.
Una observación más es que el teorema anterior no es válido si la función $F$ depende explícitamente de $t$. Supongamos que $Y(t)$ es una solución de la ecuación diferencial no autónoma
por consiguiente, la función $Y(t + c)$ satisface la ecuación diferencial
$$Y^{\prime} = F(t + c, Y) \label{14} \tag{14}$$
y tal ecuación es diferente de la ecuación no autónoma (\ref{12}).
Existencia y unicidad de las trayectorias.
Teorema: Supongamos que cada una de las funciones $F_{1}(x, y)$ y $F_{2}(x, y)$ de un sistema autónomo plano (\ref{1}) tiene derivadas parciales continuas con respecto a $x$ y $y$, entonces existe una única trayectoria a través de cada punto $Y_{0} = (x_{0}, y_{0})$ en el plano fase.
En particular, si las trayectorias de dos soluciones $Y = \phi(t)$ y $Y = \psi(t)$ tienen un punto común, entonces deben ser idénticas.
Demostración: Sea $Y_{0} = (x_{0}, y_{0})$ un punto cualquiera en el espacio fase y sea $Y = \phi(t)$ la solución del problema de valores iniciales
La trayectoria de esta solución pasa por el punto $Y_{0}$, de manera que existe al menos una trayectoria a través de cada punto $Y_{0}$, esto muestra la existencia. Supongamos ahora que la trayectoria de alguna otra solución $Y = \psi(t)$ también pasa por el punto $Y_{0}$, esto significa que existe $t_{0} \neq 0$, tal que $\psi(t_{0}) = Y_{0}$. Por el teorema anterior se tiene que la función
$$Y = \psi(t + t_{0})$$
es también una solución del sistema. Notemos que $\psi(t + t_{0})$ y $\phi(t)$ tienen el mismo valor en $t = 0$, tal valor es
Dadas las hipótesis del teorema y el resultado (\ref{16}) estamos en condiciones de aplicar el teorema de existencia y unicidad de los sistemas de ecuaciones diferenciales, por este teorema se tiene que $\psi(t + t_{0})$ es igual a $\phi(t)$ para todo $t \in \mathbb{R}$. Esto implica que las trayectorias de $\phi(t)$ y $\psi(t)$ son idénticas quedando demostrada la unicidad de las trayectorias.
$\square$
Observemos que si $\hat{Y}_{0}$ es un punto de la trayectoria de $\phi(t)$, es decir, $\hat{Y}_{0} = \phi(t_{1})$ para alguna $t_{1}$, entonces $\hat{Y}_{0}$ está también en la trayectoria de $\psi(t)$, ya que
Recíprocamente, si $\hat{Y}_{0}$ es un punto de la trayectoria de $\psi(t)$, es decir, existe $t_{2}$, tal que $\psi (t_{2}) = \hat{Y}_{0}$, entonces $ \hat{Y}_{0} $ está también en la trayectoria de $\phi (t)$, ya que
En la entrada anterior vimos que los puntos de equilibrio estables se caracterizan por que las trayectorias cercanas a dicho punto nunca llegan a él, dichas curvas solían ser cerradas, veremos a continuación que las curvas cerradas son periódicas.
Las trayectorias cerradas corresponden a soluciones periódicas.
Teorema: Sea $Y = \phi(t)$ una solución del sistema autónomo plano (\ref{1}). Si $$\phi(t_{0} + T) = \phi (t_{0}) \label{19} \tag{19}$$ para alguna $t_{0}$ y $T > 0$, entonces para todo $t \in \mathbb{R}$ $$\phi(t + T) = \phi(t) \label{20} \tag{20}$$ Es decir, si una solución $Y = \phi(t)$ de (\ref{1}) regresa a su valor inicial después de un tiempo $T > 0$, entonces debe ser periódica con periodo $T$.
Demostración: Sea $Y = \phi(t)$ una solución de (\ref{1}) y supongamos que
$$\phi(t_{0} + T) = \phi(t_{0})$$
para algún par de números $t_{0}$ y $T$. Por el primer teorema, la función
$$\psi(t) = \phi (t + T)$$
es también una solución de (\ref{1}) que coincide con $\phi(t)$ en el tiempo $t = t_{0}$. Por el teorema de existencia y unicidad de los sistemas de ecuaciones diferenciales se satisface que $\psi(t) = \phi(t + T)$ es idénticamente igual a $\phi(t)$, por lo tanto
$$\phi(t + T) = \phi(t)$$
$\square$
Explícitamente vemos que si $(x(t), y(t))$ es una solución del sistema (\ref{1}), que en dos instantes $t_{0}$ y $t_{0} + T$ toma el mismo valor, entonces
Vemos que $(x, y) = (0, 0)$ es un punto de equilibrio y todo punto de la circunferencia
$$x^{2} + y^{2} = 1$$
es también un punto de equilibrio.
Ahora podemos determinar las trayectorias del sistema analíticamente resolviendo una ecuación diferencial de primer orden, de acuerdo a (\ref{3}) dicha ecuación es
\begin{align*} y dy &= -xdx \\ \int y dy &= -\int x dx \\ \dfrac{y^{2}}{2} &= -\dfrac{x^{2}}{2} + k \\ x^{2} + y^{2} &= c^{2} \end{align*}
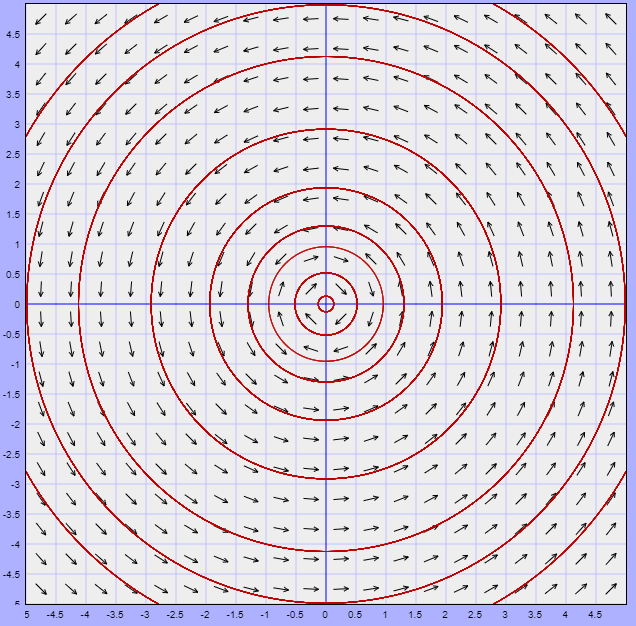
En donde $c^{2}$ engloba todas las constantes. Notamos que las trayectorias corresponden a circunferencias concéntricas de radio $c$, tal que $c\neq 1$. El plano fase se ve de la siguiente forma.
Plano fase del sistema.
Efectivamente las trayectorias son circunferencias concéntricas lo que significa que son periódicas ya que cada cierto tiempo $T$ vuelven al mismo punto de inicio $t_{0}$, sin embargo al no conocer explícitamente las soluciones $x(t)$ y $y(t)$ no no es posible determinar el valor del periodo $T$.
Notemos también que las trayectorias para $c < 1$ giran en la dirección de las manecillas del reloj, mientras que las trayectorias para $c > 1$ giran en la dirección opuesta. Es claro que todos los puntos de equilibrio son estables ya que ninguna trayectoria tiende a ellos, pero las que están cerca a ellos permanecen cerca para todo $t \in \mathbb{R}$.
$\square$
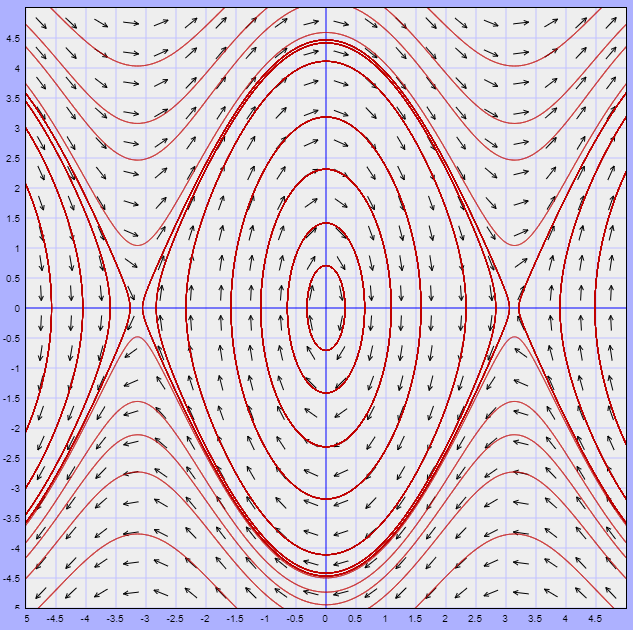
Ejemplo: Mostrar que las soluciones de la siguiente ecuación diferencial de segundo orden son periódicas.
$$\dfrac{d^{2}z}{dt^{2}} + z + z^{5} = 0$$
Solución: Lo primero que haremos será escribir la ecuación de segundo orden en un sistema de dos ecuaciones de primer orden. Sean
$$x = z \hspace{1cm} y \hspace{1cm} y = \dfrac{dx}{dt} = \dfrac{dz}{dt}$$
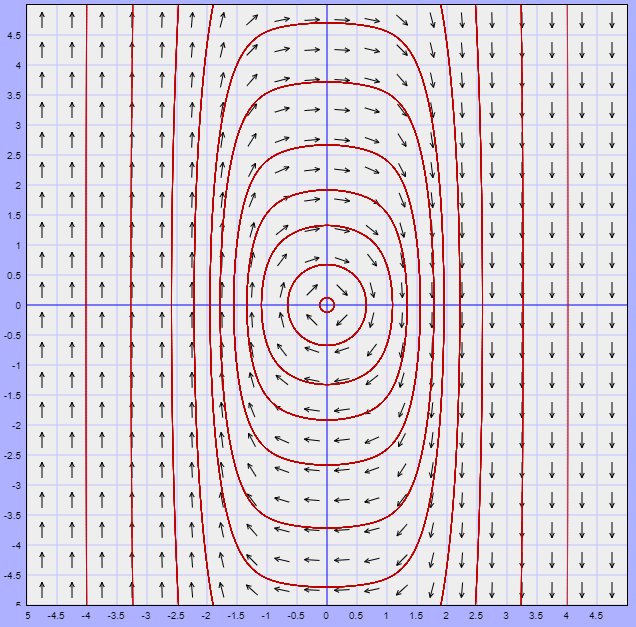
Esta ecuación define una curva cerrada para cada valor de $c$ en el plano $XY$ y como el único punto de equilibrio es el origen, entonces toda solución es periódica. El plano fase se ve de la siguiente forma.
Plano fase del sistema.
Gráficamente observamos que efectivamente las soluciones son periódicas, sin embargo no es posible calcular el periodo de ninguna solución particular.
$\square$
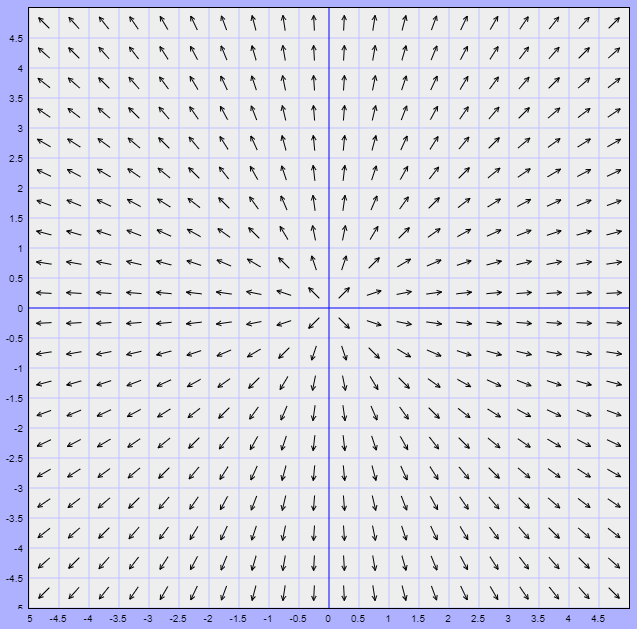
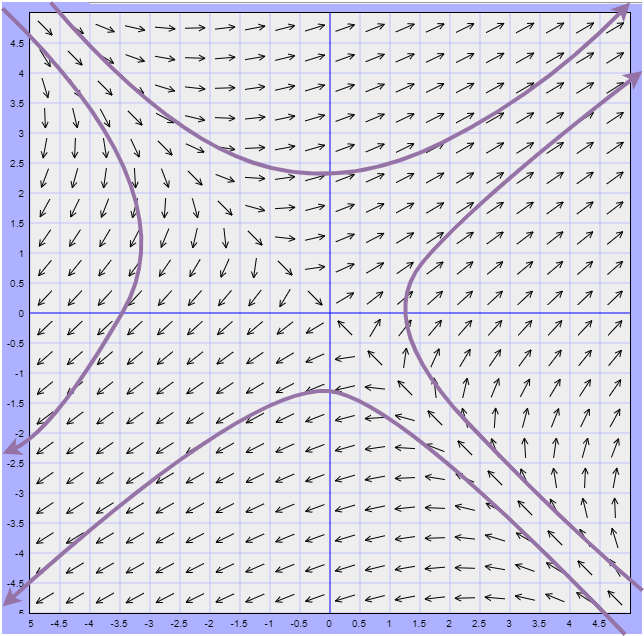
Ejemplo: Demostrar cualitativamente que las soluciones $Y(t) = (x(t), y(t))$ del sistema
que comienzan en el primer cuadrante $(x > 0, y> 0)$ deben permanecer en él para todo $t \in \mathbb{R}$.
Solución: Este es un ejemplo que nos muestra que no siempre puede ser sencillo obtener las trayectorias resolviendo una ecuación de primer orden, en este caso la ecuación a resolver sería
$$\dfrac{dy}{dx} = \dfrac{-1+xy + \cos(y)}{x^{2} + y \sin(x)}$$
Sin embargo, el ejercicio nos pide demostrarlo cualitativamente. La función vectorial $F$ es
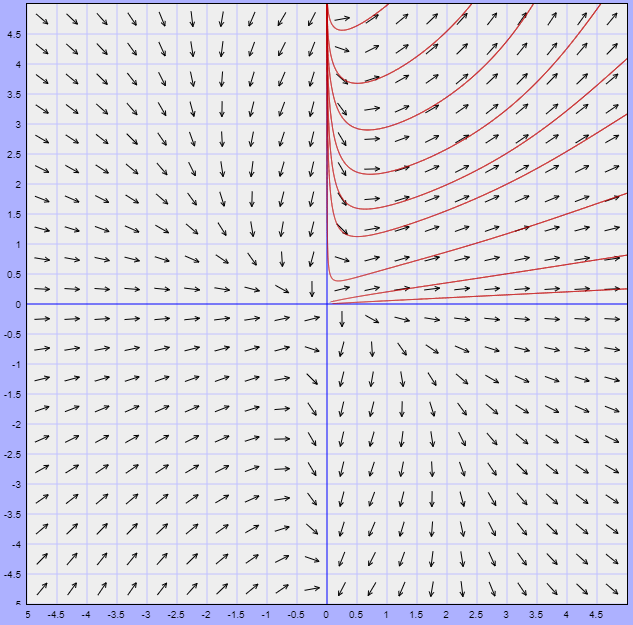
$$F(x, y) = (x^{2} + y \sin(x), -1+xy + \cos(y))$$
El plano fase con el campo vectorial asociado y las trayectorias sobre el primer cuadrante se ilustra a continuación.
Plano fase del sistema.
Al menos geométricamente logramos observar que todas las trayectorias que comienzan en el primer cuadrante permanecen en él para todo $t \in \mathbb{R}$, esto significa que las soluciones siempre permanecerán positivas para $x > 0$ y $y > 0$.
$\square$
Para concluir estudiemos el movimiento de un péndulo como ejemplo.
en donde $l$ es la longitud del hilo del péndulo, $\theta$ el ángulo que forma el hilo con la vertical y $g$ la aceleración de la gravedad.
Péndulo simple.
Analizar el movimiento del péndulo.
Solución: Primero comprendamos el fenómeno. Estamos considerando un péndulo simple en el cual si desplazamos la partícula desde la posición de equilibrio hasta que el hilo forme un ángulo $\theta$ con la vertical, y luego la soltamos partiendo del reposo, el péndulo oscilará en un plano bajo la acción de la gravedad. Las oscilaciones tendrán lugar entre las posiciones extremas $\theta$ y $-\theta$, simétricas respecto a la vertical, a lo largo de un arco de circunferencia cuyo radio es la longitud $l$ del hilo.
Comencemos por escribir la ecuación del péndulo en una sistema de dos ecuaciones de primer orden. Sean
$$x = \theta \hspace{1cm} y \hspace{1cm} y = \dfrac{d \theta}{dt} = \dfrac{dx}{dy}$$
\begin{align*} \dfrac{dx}{dt} &= y \\ \dfrac{dy}{dt} &= -\dfrac{g}{l} \sin(x) \end{align*}
La función vectorial $F$ es
$$F(x, y) = \left( y, -\dfrac{g}{l} \sin(x) \right)$$
Los puntos de equilibrio son los puntos tal que
\begin{align*} y &= 0 \\ -\dfrac{g}{l} \sin(x) &= 0 \end{align*}
De la primer ecuación tenemos $y = 0$ y de la segunda notamos que para que $\sin(x) = 0$ se debe cumplir que $x = k \pi$ con $k$ una constante entera, por tanto el sistema tiene infinitos puntos de equilibrio y son de la forma $(k\pi ,0)$ con $k\in \mathbb{Z}$.
Consideremos los puntos de equilibrio $(0,0)$ y $(\pi ,0)$. El primer punto indica que
$$x = \theta = 0 \hspace{1cm} y \hspace{1cm} y = \dfrac{d \theta}{dt} = 0$$
En este caso el péndulo se encuentra en reposo en la posición de equilibrio y no hay desplazamiento ya que la velocidad es nula.
En el caso del segundo punto crítico se tiene que
$$x = \theta = \pi \hspace{1cm} y \hspace{1cm} y = \dfrac{d \theta}{dt} = 0$$
Por tanto, el ángulo de desplazamiento es $\pi$, y la velocidad nuevamente es nula. En cualquiera de estas dos situaciones el péndulo continuará así indefinidamente. Sin embargo, estos dos puntos de equilibrio son diferentes. Cuando nos encontramos en la situación de equilibrio $(0,0)$, ante cualquier pequeño cambio de la situación (cambio de posición o de velocidad), el sistema presentará pequeñas oscilaciones, mientras que cuando nos encontramos en la situación de equilibrio $(\pi, 0)$, estos pequeños cambios harán que el sistema presente una notable desviación. Estas características indican que el punto de equilibrio $(0, 0)$ es estable, mientras que el punto de equilibrio $(\pi, 0)$ es inestable.
A continuación se muestra el plano fase del sistema en el cual podemos observar las trayectorias para distintas soluciones particulares $(x(t), y(t))$ y lo que sucede alrededor de los puntos de equilibrio.
Plano fase del péndulo simple.
El plano fase muestra geométricamente que las soluciones para valores de $x = \theta$ pequeños el movimiento es periódico y deja de serlo conforme nos acercamos a los puntos de equilibrio $(-\pi, 0)$ o $(\pi, 0)$. Esto tiene sentido, pues la ecuación del péndulo (\ref{22}) no corresponde a un movimiento armónico simple debido a la presencia de la función seno, sin embargo para oscilaciones de pequeña amplitud en los que el ángulo es suficientemente pequeño se puede hacer la aproximación $\sin(\theta) \approx \theta$, en este caso la ecuación del péndulo se reduce a
$$l \dfrac{d^{2} \theta}{dt^{2}} + g \theta = 0 \label{23} \tag{23}$$
la cual corresponde a una ecuación de movimiento armónico simple refiriéndose al movimiento angular en lugar del movimiento rectilíneo.
La solución de la ecuación (\ref{23}) es
$$\theta = A \sin(\omega t + \phi) \label{24} \tag{24}$$
y $A$ y $\phi$ son constantes correspondientes a la amplitud angular y a la fase inicial del movimiento, respectivamente y son determinadas por las condiciones iniciales.
$\square$
Con esto concluimos esta entrada.
En las próximas entradas revisaremos nuevamente los sistemas lineales homogéneos y el método de valores y vectores propios para hacer un análisis desde una perspectiva cualitativa.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Para las demostraciones cualitativas puedes usar la herramienta que hemos estado utilizando.
Demostrar cualitativamente que todas las soluciones $Y(t) = (x(t), y(t))$ del sistema
$x^{\prime} = y(e^{x} -1)$ $y^{\prime} = x + e^{y}$
que comienzan en el semiplano derecho $(x > 0)$ deben permanecer en él para todo $t \in \mathbb{R}$.
Demostrar cualitativamente que todas las soluciones $Y(t) = (x(t), y(t))$ del sistema
En la unidad anterior desarrollamos el método de valores y vectores propios para resolver sistemas lineales homogéneos, vimos que existen distintos casos de acuerdo al valor que tomen los valores propios y el método de resolución para cada caso es relativamente distinto. En las siguientes entradas estudiaremos nuevamente estos sistemas con la adición de que ahora estudiaremos el tipo de trayectorias que genera cada sistema en el plano fase y veremos la dependencia que tienen éstas con el valor que tomen los valores propios.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Si hay un Dios, es un gran matemático. – Paul Dirac
Introducción
En la entrada anterior realizamos un desarrollo geométrico y un tanto cualitativo de un sistema de dos ecuaciones diferenciales lineales de primer orden homogéneas con coeficientes constantes con el fin de introducirnos a la teoría cualitativa de las ecuaciones diferenciales. En dicha entrada justificamos la razón por la que estudiaremos principalmente los sistemas compuestos por dos ecuaciones de primer orden.
En esta entrada presentaremos formalmente la teoría cualitativa y geométrica de los sistemas tanto lineales como no lineales compuestos por dos ecuaciones diferenciales de primer orden.
Teoría cualitativa
A lo largo del curso nos hemos centrado en el problema de obtener soluciones, hemos desarrollado una serie de métodos de resolución de ciertos tipos de ecuaciones diferenciales y sistemas lineales. Lo que haremos ahora es dar otro enfoque al estudio de las ecuaciones diferenciales planteándonos obtener información cualitativa sobre el comportamiento de las soluciones.
Hemos visto que, a medida que aumenta la complejidad de las ecuaciones diferenciales, o los sistemas lineales, mayor es la dificultad que tenemos para obtener soluciones. Existen incluso ecuaciones que no se sabe cómo se resuelven o ecuaciones en las que obtener su solución es bastante costoso, por lo que una alternativa será hacer un análisis cualitativo, pues muchas veces bastará conocer el comportamiento de las soluciones.
Recordemos que, además de hacer un análisis cualitativo, estamos interesados en hacer un análisis geométrico, así que centraremos nuestra atención en los sistemas de dos ecuaciones diferenciales ya que, como vimos en la entrada anterior, tenemos la oportunidad de hacer gráficas en dos dimensiones, es decir, podremos visualizar sin ningún problema el plano fase.
Sistemas autónomos
En la entrada anterior vimos la importancia de que el sistema no dependa explícitamente de la variable independiente $t$ para poder hacer nuestro desarrollo geométrico. Este tipo de sistemas tienen un nombre particular.
Definición: Un sistema autónomo plano es un sistema de dos ecuaciones diferenciales de la forma \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \label{1} \tag{1} \end{align*} En donde las funciones $F_{1}$ y $F_{2}$ son continuas y con derivadas parciales de primer orden continuas en todo el plano.
El sistema se denomina autónomo debido a que la variable independiente $t$ no aparece explícitamente en las ecuaciones del sistema. Las condiciones de $F_{1}$ y $F_{2}$ garantizan la existencia y unicidad de la solución definida $\forall$ $t \in \mathbb{R}$ del problema de valores iniciales
Entonces el sistema autónomo (\ref{5}) se puede escribir como
$$Y^{\prime} = F(x, y) \label{8} \tag{8}$$
Por su puesto, si se define la matriz de coeficientes
$$\mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \label{9} \tag{9}$$
entonces el sistema lineal (\ref{5}) se puede escribir como
$$\begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \label{10} \tag{10}$$
Notación: Hemos visto que no necesariamente haremos uso de la notación vectorial como en la unidad anterior, así que con fines de notación usaremos letras en negrita cuando trabajemos con vectores (o matrices) y letras sin negrita cuando no usemos la notación vectorial a pesar de indicar lo mismo. Por ejemplo, la solución de un sistema en notación vectorial la escribiremos como
mientras que la misma solución sin notación vectorial como
$$Y(t) = (x(t), y(t))$$
Está última notación nos será de utilidad para representar coordenadas en el plano $\mathbb{R}^{2}$.
Algunas definiciones
Las siguientes definiciones son generales, para cualquier sistema autónomo de dos ecuaciones diferenciales de primer orden.
Las soluciones de un sistema autónomo reciben un nombre especial.
Definición: Las variables dependientes $x(t)$ y $y(t)$, que son solución de un sistema autónomo plano (\ref{1}), se llaman variables de estado del sistema.
En la entrada anterior ya trabajamos con el plano fase, definámoslo formalmente.
Definición: El plano formado por los pares de valores $(x, y)$ se llama plano fase.
Definición: Una curva $$C = [x(t), y(t)] \label{12} \tag{12}$$ en el plano $XY$ o plano fase está definida por el par de funciones $x(t)$ y $y(t)$ que son solución del sistema lineal (\ref{1}).
Cada punto de la curva $C$ determina el estado del sistema en un instante $t$ correspondiente a una condición inicial determinada.
Definición: Al conjunto de curvas $C = [x(t), y(t)]$ en el plano fase se les llama trayectorias u órbitas.
En la entrada anterior vimos que en cada punto $(x, y)$ de una curva solución, el vector
$$F(x, y) = (F_{1}(x, y), F_{2}(x, y))$$
es un vector tangente a dicha curva en cada punto $(x, y)$. El conjunto de vectores tangentes recibe un nombre.
Definición: Al conjunto de vectores $F(x, y)$ tangentes a las trayectorias se le denomina campo de direcciones o campo vectorial del sistema.
Con estas definiciones podemos decir que el plano fase es una representación geométrica de todas las trayectorias de un sistema dinámico en el plano, donde cada curva representa una condición inicial diferente. Entendemos por sistema dinámico al sistema cuyo estado evoluciona con el tiempo.
Como ejemplo visualicemos el campo vectorial de dos sistemas de ecuaciones diferenciales sencillos usando la herramienta que ya conocemos.
Ejemplo: Visualizar el campo vectorial del sistema lineal
\begin{align*} x^{\prime} &= x \\ y^{\prime} &= y \end{align*}
Solución: La función vectorial es
$$F(x, y) = (x, y)$$
El campo vectorial en el plano fase se ilustra a continuación.
Campo vectorial $F(x, y) = (x, y)$.
Los vectores del campo vectorial siempre señalan directamente alejándose del origen.
$\square$
Ejemplo: Visualizar el campo vectorial del sistema lineal
En este caso los vectores del campo vectorial apuntan directamente hacia el origen.
$\square$
Como el campo vectorial es tangente a las soluciones del sistema, entonces en los dos ejemplos anteriores deducimos que las soluciones son rectas con distintas pendientes para cada solución particular.
En la herramienta que utilizamos se puede dar clic sobre el campo vectorial para trazar distintas soluciones. Inténtalo con los ejemplos anteriores.
Puntos de equilibrio
Por sí solo el campo vectorial de un sistema ya nos da información sobre el comportamiento que presentan las trayectorias sin siquiera conocer explícitamente las soluciones del sistema, sin embargo en cada plano fase existe al menos un punto particular sobre el cual dependerá casi por completo el comportamiento de las soluciones, dichos puntos se conocen como puntos de equilibrio.
Definición: El punto $$Y_{0} = (x_{0}, y_{0})$$ tal que, $$F(x_{0}, y_{0}) = (0, 0)$$ se dice que es un punto crítico o punto de equilibrio del sistema.
Como ejemplo determinemos los puntos de equilibrio de dos sistemas de ecuaciones diferenciales.
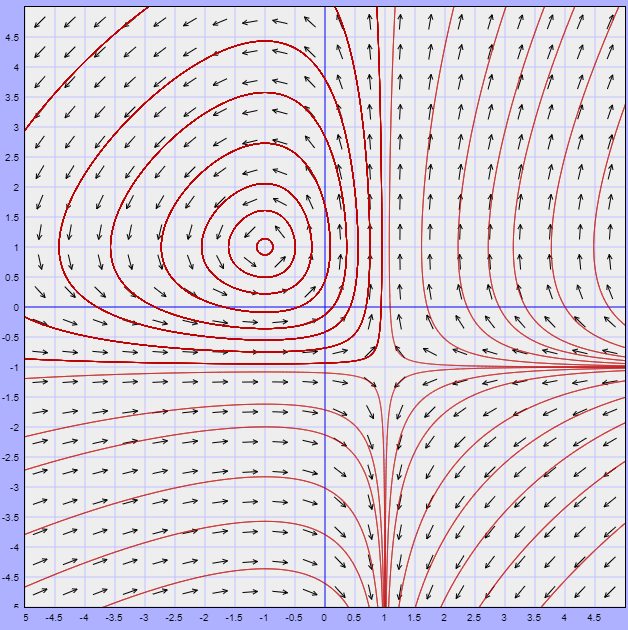
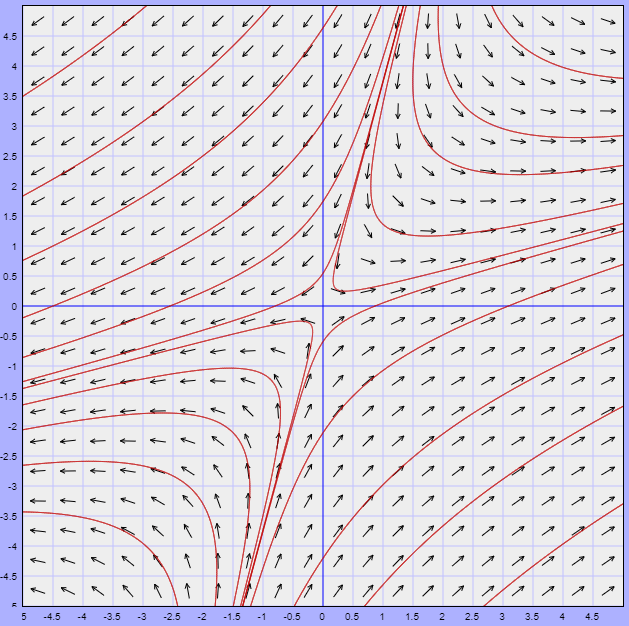
Ejemplo: Hallar los puntos de equilibrio del siguiente sistema de ecuaciones diferenciales y visualizar que ocurre alrededor de ellos.
Hemos encontrado dos puntos de equilibrio. Veamos cómo se ve el campo vectorial del sistema y que forma tienen las soluciones alrededor de estos puntos.
Plano fase: Campo vectorial, puntos de equilibrio y trayectorias del sistema.
Recordemos que la dirección de las trayectorias está definida por la dirección del campo vectorial. En el plano fase observamos que alrededor del punto de equilibrio $(-1, 1)$ las soluciones son trayectorias cerradas que giran en torno a dicho punto, mientras que alrededor del punto de equilibrio $(1, -1)$ las trayectorias tienden a acercarse a dicho punto, pero cuando se aproximan a él inmediatamente se alejan.
$\square$
Más adelante caracterizaremos a los puntos de equilibrio de acuerdo al tipo de comportamiento que tienen las trayectorias alrededor de él. Por ahora notemos estas características. Veamos un ejemplo más.
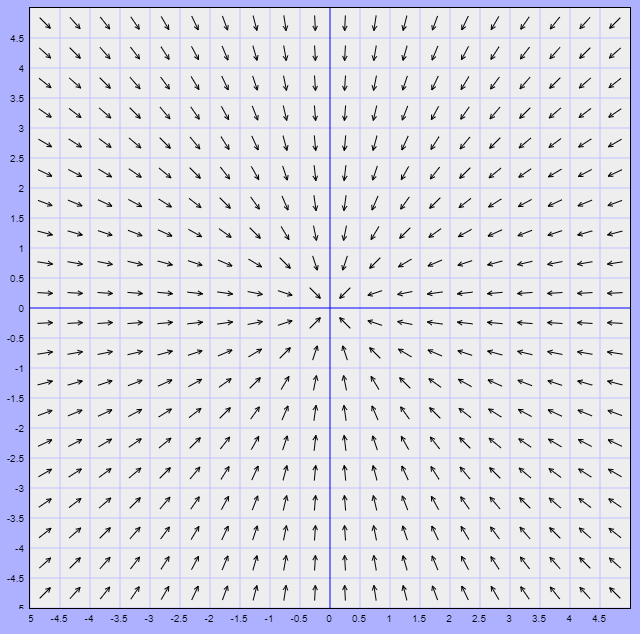
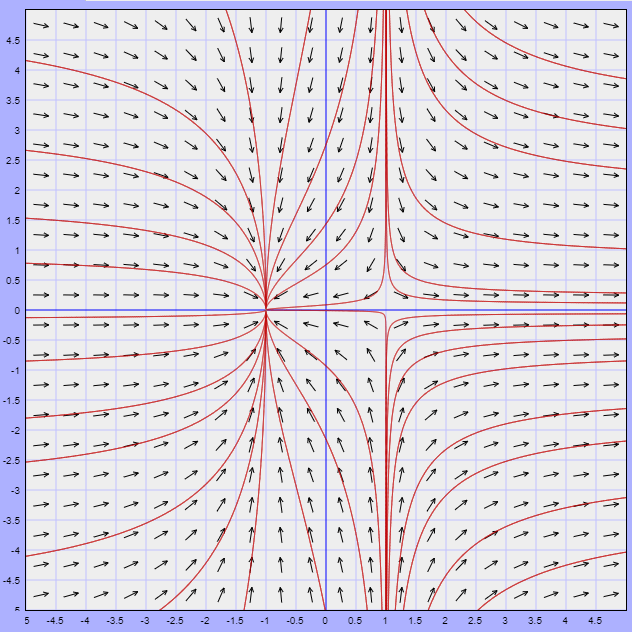
Ejemplo: Hallar los puntos de equilibrio del siguiente sistema de ecuaciones diferenciales y visualizar que ocurre alrededor de ellos.
De la segunda ecuación obtenemos inmediatamente que $y_{0} = 0$ y de la primer ecuación obtenemos que $x^{2}_{0}= 1$. Por lo tanto, los puntos de equilibrio son
Plano fase: Campo vectorial, puntos de equilibrio y trayectorias del sistema.
En esta ocasión observamos que las trayectorias tienden hacía el punto de equilibrio $(-1, 0)$, mientras que alrededor del punto de equilibrio $(1, 0)$ las trayectorias tienden a alejarse de él.
$\square$
Con estos dos ejemplos observamos tres cualidades de las trayectorias alrededor de los puntos de equilibrio. El primero de ellos es que hay trayectorias cerradas que permanecen cerca de un punto de equilibrio, pero que nunca llegan a él, por otro lado, hay trayectorias que tienden directamente hacía a un punto de equilibrio y finalmente hay puntos de equilibrio en los que las trayectorias tienden a alejarse de él. A esto se le conoce como estabilidad de los puntos de equilibrio y lo estudiaremos más adelante en esta entrada.
Un hecho importante es que los sistemas de los dos ejemplos anteriores son sistemas no lineales y ya comenzamos a caracterizar y visualizar el comportamiento de las soluciones a pesar de no conocer ningún método para obtener las soluciones explícitamente, de ahí la importancia de este análisis cualitativo.
Cabe mencionar que resolver sistemas no lineales puede ser muy complejo, al menos para un primer curso de ecuaciones diferenciales, es por ello que dedicamos la unidad anterior al caso exclusivamente lineal.
Por otro lado, es claro que cada punto del plano fase, o bien es un punto de equilibrio, o bien pasa por él una única trayectoria. Existe un resultado importante que nos permite saber cuando el único punto de equilibrio de un sistema lineal es el origen.
Teorema: Si $\mathbf{A}$ es una matriz con determinante distinto de cero $\left( \left | \mathbf{A} \right |\neq 0 \right)$, entonces el único punto de equilibrio para el sistema lineal ${\mathbf{Y}}’ = \mathbf{AY}$ es el origen.
Demostración: Consideremos el sistema lineal ${\mathbf{Y}}’ = \mathbf{AY}$ cuya matriz de coeficientes es (\ref{9}), entonces podemos escribir al sistema lineal como
$$\begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$
Sabemos que un punto $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio del sistema si el campo vectorial en $Y_{0}$ es cero, es decir, si
$$F(x_{0}, y_{0}) = (0, 0)$$
Sabemos, por otro lado, que el sistema lineal también se puede escribir en términos de la función vectorial $F$ como
Es claro que $(x_{0}, y_{0}) = (0, 0)$ es una solución de las ecuaciones (\ref{18}). Por tanto, $Y_{0} = (0, 0)$ es un punto de equilibrio y la función constante
$$Y(t) = (0, 0) \label{19} \tag{19}$$
para toda $t \in \mathbb{R}$ es una solución del sistema lineal. Ahora veamos si existe otra solución que no sea la trivial.
Cualesquiera puntos de equilibrio $(x_{0}, y_{0}) \neq (0, 0)$ deben también satisfacer el sistema (\ref{18}). Para encontrarlos supongamos por ahora que $a\neq 0$, de la primer ecuación se obtiene que
$$y_{0} = 0 \hspace{1cm} o \hspace{1cm} ad -bc =0$$
Si $y_{0} = 0$, entonces $x_{0} = 0$ y de nuevo obtenemos la solución trivial. Por tanto, un sistema lineal tiene puntos de equilibrio no triviales sólo si
$$ad -bc = 0$$
es decir si el determinante de $\mathbf{A}$ es igual a cero. Esto significa que si $|\mathbf{A}| \neq 0$, entonces el único punto de equilibrio del sistema lineal es el origen.
$\square$
Una observación importante en la demostración es que el cálculo que hicimos no depende de los valores de los coeficientes $a, b, c$ y $d$, sólo de la condición $a \neq 0$, por tanto ¡todo sistema lineal tiene un punto de equilibrio en el origen!.
Estabilidad de puntos de equilibrio
Veíamos que hay tres cualidades de las trayectorias alrededor de puntos de equilibrio. De acuerdo al comportamiento que tengan las trayectorias alrededor de los puntos de equilibrio éstos recibirán un nombre.
Definición: Dado un sistema autónomo, el punto $(x_{0}, y_{0})$ es un punto de equilibrio estable si $\forall$ $\varepsilon > 0$, $\exists$ $\delta > 0$, tal que si $(x(t), y(t))$ es una solución del sistema y $$\left \| (x(t_{0}), y(t_{0})) -(x_{0}, y_{0}) \right \| < \delta \label{22} \tag{22}$$ entonces, $\forall$ $t \geq t_{0}$ $$\left \| (x(t), y(t)) -(x_{0}, y_{0}) \right \| < \varepsilon \label{23} \tag{23}$$
Lo que esta definición nos dice es que si una trayectoria está cerca del punto de equilibrio $(x_{0}, y_{0})$, entonces se mantendrá cerca de él para $t_{0} \leq t \rightarrow \infty$.
Definición: Dado un sistema autónomo, el punto $(x_{0}, y_{0})$ es un punto de equilibrio asintóticamente estable si $\exists$ $\delta > 0$, tal que $$\left \| (x(t_{0}), y(t_{0})) -(x_{0}, y_{0}) \right \| < \delta$$ entonces, cuando $t \rightarrow \infty$, se tiene que $$(x(t), y(t)) \rightarrow (x_{0}, y_{0})$$
Es este caso las trayectorias cercanas al punto de equilibrio $(x_{0}, y_{0})$ no sólo se mantendrán cerca de dicho punto, sino que tenderán a él para $t_{0} \leq t \rightarrow \infty$.
Definición: Dado un sistema autónomo, el punto $(x_{0}, y_{0})$ es un punto de equilibrio inestable si no es un punto de equilibrio estable.
Contrario a un punto de equilibrio estable, si las trayectorias están cerca del punto de equilibrio $(x_{0}, y_{0})$, entonces se alejarán de él para $t_{0} \leq t \rightarrow \infty$.
Las definiciones anteriores son aplicables a cualquier punto de equilibrio $(x_{0}, y_{0})$, sin embargo las definiciones se vuelven más intuitivas si el punto de equilibrio sobre el que se trabaja es el origen $(x_{0}, y_{0}) = (0, 0)$ del plano $XY$ o plano fase.
Supongamos que el punto de equilibrio del sistema (\ref{1}) es el origen y que está aislado, esto es que existe un entorno donde no hay otro punto de equilibrio. Notemos que el hecho de que el punto de equilibrio sea el origen no supone ningún tipo de restricción ya que se puede hacer el cambio de variable
\begin{align*} \hat{x} &= x -x_{0} \\ \hat{y} &= y -y_{0} \label{24} \tag{24} \end{align*}
cuyo punto de equilibrio es el punto $(0, 0)$. En estas condiciones definimos de manera más intuitiva la estabilidad de un punto de equilibrio.
Definición: Se dice que el punto de equilibrio $(0, 0)$ del sistema (\ref{1}) es estable si para todo número $R > 0$ existe algún $r > 0$, $r \leq R$, tal que cada trayectoria que está dentro del circulo $$x^{2} + y^{2} = r^{2}$$ en algún momento $t_{0}$ permanezca dentro del circulo $$x^{2} + y^{2} = R^{2}$$ para todos los $t > t_{0}$.
Definición: Se dice que el punto de equilibrio $(0, 0)$ del sistema (\ref{1}) es asintóticamente estable cuando es estable y existe algún número $r_{0} > 0$, tal que toda trayectoria que está dentro del circulo $$x^{2} + y^{2} = r^{2}_{0}$$ en algún momento $t_{0}$, se aproxime al origen cuando $t \rightarrow \infty$.
Definición: Se dice que el punto de equilibrio $(0, 0)$ del sistema (\ref{1}) es inestable cuando no es estable.
Realicemos algunos ejemplos de manera gráfica.
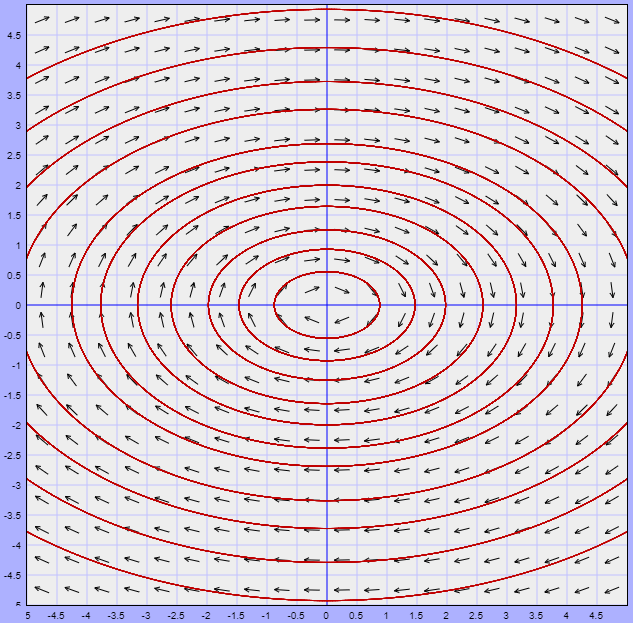
Ejemplo: Definir el tipo de punto de equilibrio del siguiente sistema visualizando el comportamiento de las trayectorias alrededor de dicho punto.
Solución: Es claro que el punto de equilibrio es el origen ya que si $x = 0$ y $y = 0$, entonces
$$F(0, 0) = (0, 0)$$
El campo vectorial y algunas trayectorias del sistema se muestran a continuación.
Plano fase del sistema.
Observamos que las trayectorias son cerradas, lo que significa que todas las que están cerca del punto de equilibrio permanecerán cerca de él, pero nunca llegarán a él conforme $t \rightarrow \infty$. De acuerdo a las definiciones anteriores, el punto de equilibrio corresponde a un punto estable. Veremos más adelante que este tipo de trayectorias corresponden a soluciones periódicas.
$\square$
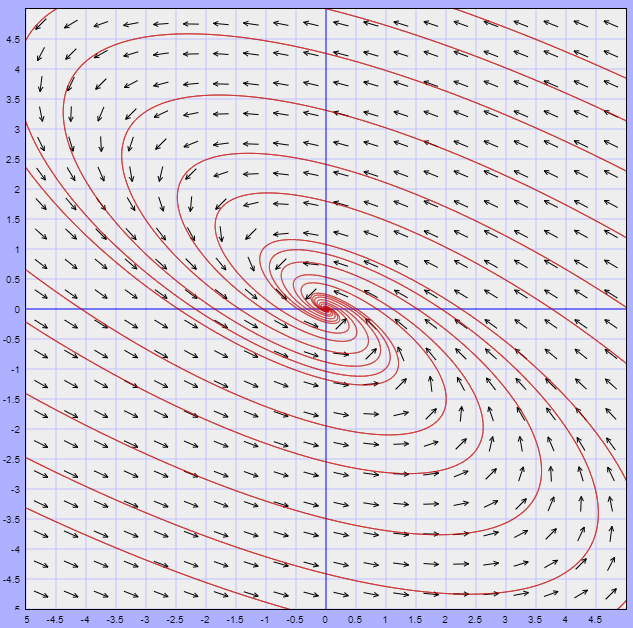
Ejemplo: Definir el tipo de punto de equilibrio del siguiente sistema visualizando el comportamiento de las trayectorias alrededor de dicho punto.
Solución: Como el sistema es lineal podemos aplicar el teorema visto para verificar que el único punto de equilibrio del sistemas es el origen. La matriz de coeficientes es
Como $|A| \neq 0$, entonces el único punto de equilibrio es el origen.
El plano fase del sistema se ilustra a continuación.
Plano fase del sistema.
Es este caso se logra observar que las trayectorias cerca del punto de equilibrio tienden a él conforme $t \rightarrow \infty$, lo que lo define como un punto de equilibrio asintóticamente estable.
$\square$
Veamos un último ejemplo.
Ejemplo: Definir el tipo de punto de equilibrio del siguiente sistema visualizando el comportamiento de las trayectorias alrededor de dicho punto.
Solución: Nuevamente se puede verificar que el único punto de equilibrio del sistema es el origen. Observemos el plano fase.
Plano fase del sistema.
En este caso se observa que cerca del punto de equilibrio las trayectorias se alejan de él, por lo que dicho punto es un punto inestable.
$\square$
Al menos geométricamente ya somos capaces de identificar el tipo de comportamiento que tienen las trayectorias alrededor de los puntos de equilibrio según su clasificación.
Más adelante resolveremos algunos sistemas lineales y haremos este mismo análisis desde una perspectiva analítica analizando las soluciones que obtengamos. Más aún, veremos que de acuerdo al valor de los eigenvalores del sistema será el tipo de punto de equilibrio que tendrá dicho sistema. Pero antes de ello, en la siguiente entrada estudiemos algunas propiedades cualitativas de las trayectorias.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Visualizar el campo vectorial y algunas trayectorias de los siguientes sistemas. ¿Tienen puntos de equilibrio?.
Determinar los puntos de equilibrio de los siguientes sistemas y clasificarlos como estables, asintóticamente estables o inestables. Visualizar el campo vectorial y algunas trayectorias.
Analizar el comportamiento de las curvas solución del siguiente sistema.
$x^{\prime} = 3/y$ $y^{\prime} = 2/x$
¿Qué se puede observar?. ¿Hay puntos de equilibrio?.
Más adelante…
Conforme avanzamos nos damos cuenta que es posible describir cualitativamente las soluciones de un sistema tanto lineal como no lineal compuesto por dos ecuaciones diferenciales de primer orden homogéneas con coeficientes contantes, esto tiene la enorme ventaja de que ya no es necesario conocer explícitamente las soluciones del sistema para poder trabajar.
Continuando con nuestro desarrollo cualitativo, en la siguiente entrada estudiaremos algunas propiedades de las trayectorias en el plano fase.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
No hay rama de la matemática, por lo abstracta que sea, que no pueda aplicarse algún día a los fenómenos del mundo real. – Lobachevski
Introducción
¡Bienvenidos a la cuarta y última unidad del curso de Ecuaciones Diferenciales I!.
En esta unidad estudiaremos a las ecuaciones diferenciales ordinarias desde una perspectiva cualitativa y geométrica. En particular, estudiaremos las propiedades cualitativas de los sistemas de ecuaciones diferenciales de primer orden que vimos en la unidad anterior y, como sabemos, las ecuaciones de orden superior se pueden reducir a sistemas de ecuaciones de primer orden, lo que significa que en nuestro estudio también estaremos revisando las propiedades cualitativas de algunas de las ecuaciones vistas en la unidad 2.
La teoría cualitativa ya no es nueva para nosotros, pues en la primera unidad estudiamos desde esta perspectiva a las ecuaciones de primer orden. Recordemos que una ecuación diferencial de primer orden se puede ver, en su forma normal, como
En esta última ecuación la variable independiente no aparece explícitamente.
Sobre la ecuación (\ref{1}) definimos los conceptos de elementos lineales, campo de pendientes, curvas integrales e isóclinas y sobre la ecuación (\ref{2}) definimos conceptos como puntos de equilibrio o puntos críticos, esquema de fases, líneas de fase, así como atractores, repulsores y nodos. Muchos de estos conceptos los generalizaremos a los sistemas lineales, además de algunos otros conceptos nuevos que definiremos.
En esta entrada daremos una introducción intuitiva al análisis cualitativo y geométrico de los sistemas lineales y a partir de la siguiente entrada comenzaremos a formalizar la teoría.
Sistemas lineales
Recordemos que un sistema de ecuaciones diferenciales de primer orden es de la forma
En esta unidad estudiaremos a detalle la propiedades cualitativas de los sistemas lineales compuestos por dos ecuaciones diferenciales de primer orden homogéneas con coeficientes constantes por muchas razones, las cuales comentaremos al final de la entrada. Dicho sistema lo podemos escribir de la siguiente forma.
Esta es una nueva forma de ver un sistema lineal, sin embargo nuestro interés está en hacer un análisis cualitativo y geométrico, así que es conveniente ver a la ecuación (\ref{11}) como una función de varias variables definida en un dominio $U$.
Observemos que el sistema lineal (\ref{6}) no depende explícitamente de la variable $t$, por lo que podemos escribir
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{12} \tag{12} \end{align*}
Y ahora podemos escribir
$$F_{1}(x, y) = ax + by \hspace{1cm} y \hspace{1cm} F_{2}(x, y) = cx + dy \label{13} \tag{13}$$
Es claro que $F_{1}: \mathbb{R}^{2} \rightarrow \mathbb{R}$ y $F_{2}: \mathbb{R}^{2} \rightarrow \mathbb{R}$, es decir las funciones $F_{1}$ y $F_{2}$ son funciones de dos variables cuyo dominio está formado por puntos con $2$ coordenadas y la función asocia a cada punto un número real determinado. La gráfica de estas funciones está en $\mathbb{R}^{3}$. Ahora bien, se puede definir la función
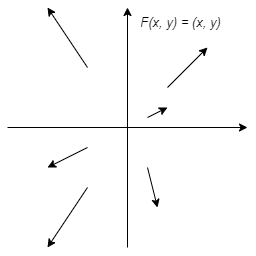
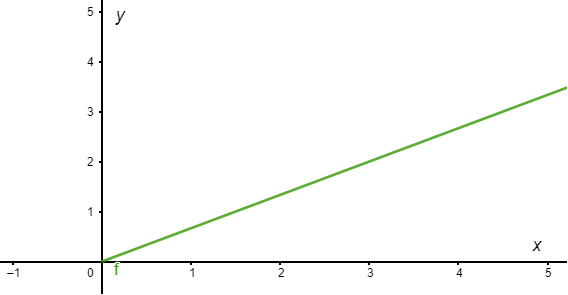
En este caso $F: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}$, así que ya no podemos visualizar su gráfica, sin embargo existe una técnica en la que en un mismo plano a cada elemento $(x, y) \in \mathbb{R}^{2}$ lo dibujamos como un punto y a $F(x, y)$ como un vector colocado sobre ese punto $(x, y)$. Por ejemplo, la función
$$F(x, y) = (x, y)$$
se puede visualizar como
Bosquejo de la función $F(x, y) = (x, y)$.
Este tipo de bosquejos es lo que conocemos como campos vectoriales.
Finalmente consideremos las soluciones del sistema lineal (\ref{12}). En este caso lo que obtendremos al resolver el sistema serán dos funciones $x(t)$ y $y(t)$ definidas como $x: \mathbb{R} \rightarrow \mathbb{R}$ y $y: \mathbb{R} \rightarrow \mathbb{R}$. Lo que deseamos es graficar de alguna manera estas dos funciones en el mismo plano en el que se bosqueja el campo vectorial $F(x, y)$, para hacerlo definimos la función
$$f(t) = (x(t), y(t)) \label{15} \tag{15}$$
Vemos que $f: \mathbb{R}^{2} \rightarrow \mathbb{R}$, es decir, dado un valor para $t$ las soluciones $x(t)$ y $y(t)$ toman un valor particular que sirven como entrada de la función $f$ y ésta devuelve un sólo valor.
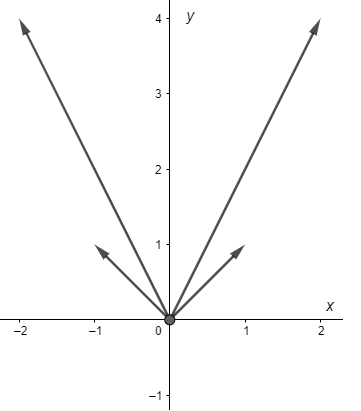
Para tener una visualización de $f$ consideremos como ejemplo la función
$$f(t) = (t, t^{2})$$
con $t \in [-2, 2]$, es decir,
$$x(t) = t \hspace{1cm} y \hspace{1cm} y(t) = t^{2}$$
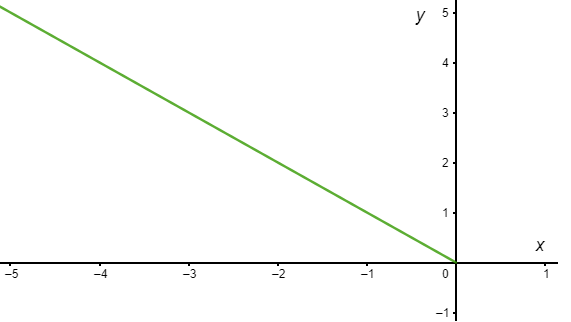
Para visualizar estos datos lo que vamos a hacer es dibujar vectores que parten del origen hacía las coordenadas $(x(t), y(t))$ obtenidas, tal como se muestra en la siguiente figura.
Vectores correspondientes a $f(t)$ para $t = -2, -1, 1, 2$.
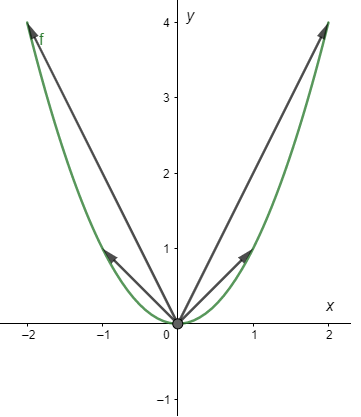
$f(t)$ será la curva que trazará la punta del vector a medida que $t$ tiene distintos valores. Siguiendo con el mismo ejemplo $f(t) = (t, t^{2})$ para $t \in [-2, 2]$, la curva que traza $f$ se ve de la siguiente forma.
Curva de la función $f(t) = (t, t^{2})$ para $t \in [-2, 2]$.
Observemos que $f(t) = (t, t^{2})$ no es más que la parametrización de la parábola $y(x) = x^{2}$ en el intervalo $[-2, 2]$. Es por ello que diremos que $f(t)$ es una función paramétrica.
Recordemos que un sistema de ecuaciones paramétricas permite representar una curva o superficie en el plano o en el espacio mediante una variable $t$ llamada parámetro que recorre un intervalo de números reales, considerando cada coordenada de un punto como una función dependiente del parámetro.
Concluiremos esta entrada con un ejemplo para visualizar cómo es que esta nueva forma de ver el problema de resolver un sistema lineal nos ayudará a obtener información cualitativa del mismo.
Análisis cualitativo y geométrico
Ejemplo: Hacer un análisis cualitativo y geométrico del siguiente sistema lineal homogéneo.
Hasta aquí es hasta donde hemos llegado con lo visto en la unidad anterior, ahora veamos el comportamiento de estas soluciones geométricamente.
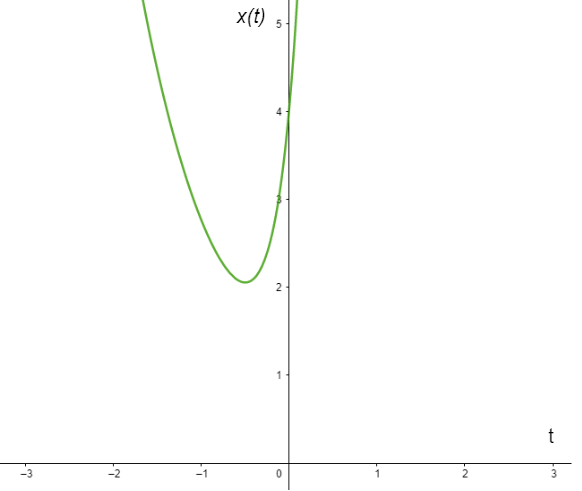
Obtuvimos dos funciones, cada una de ellas depende de la variable $t$ de forma que la primer función la podemos graficar en el plano $XT$, mientras que la segunda en el plano $YT$.
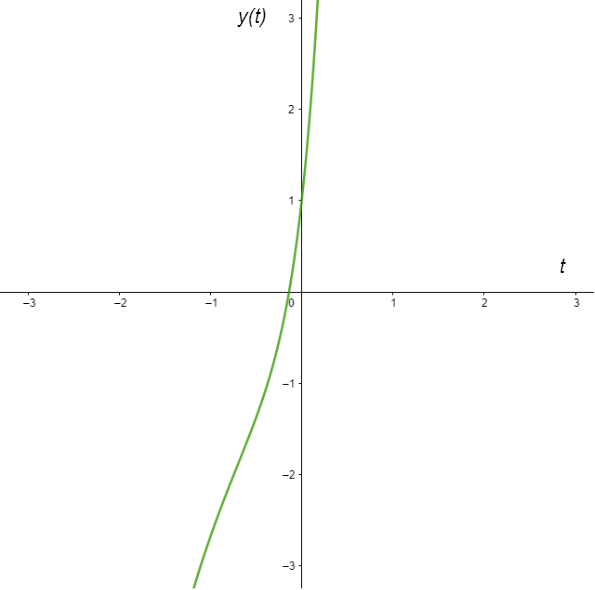
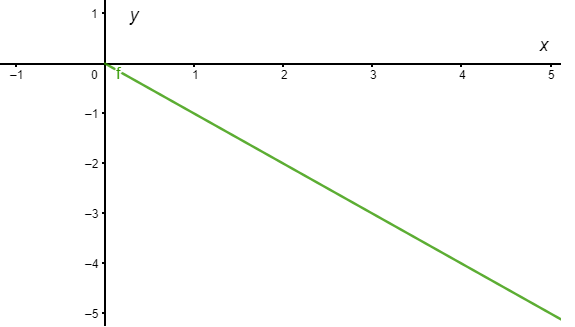
La gráfica de $x(t)$ para $c_{1} = c_{2} = 1$ se ve de la siguiente forma.
Función $ x(t) = e^{-t} + 3 e^{4t}$ en el plano $XT$.
Por otro lado, la gráfica de $y(t)$ para $c_{1} = c_{2} = 1$ se ve de la siguiente forma.
Función $y(t) = -e^{-t} + 2e^{4t}$ en el plano $YT$.
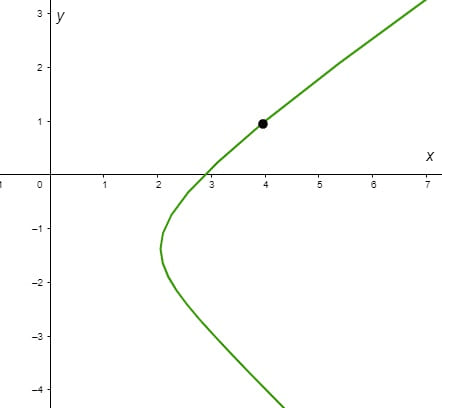
De acuerdo a (\ref{15}), la función paramétrica es
Grafiquemos en el plano $XY$ la trayectoria de esta función.
Trayectoria en el plano $XY$ o plano fase.
Como ejemplo, si $t = 0$, entonces $x(0) = 4$ y $y(0) = 1$, tal coordenada $(4, 1)$ corresponde al punto mostrado en el plano $XY$, así la trayectoria se forma por el conjunto de puntos $(x(t), y(t))$ correspondientes a cada valor $t \in \mathbb{R}$.
Las tres gráficas anteriores corresponden a la solución particular en la que $c_{1} = c_{2} = 1$, así cada solución particular producirá tres curvas distintas en tres planos distintos.
Nos centraremos especialmente en el plano $XY$ o también llamado plano fase. Cada una de las curvas que se pueden formar en el plano fase correspondientes a valores específicos de $c_{1}$ y $c_{2}$ se llama trayectoria.
En el siguiente plano fase se muestra un conjunto de trayectorias definidas por (\ref{21}) para distintos valores de $c_{1}$ y $c_{2}$.
Distintas trayectorias en el plano fase.
Al conjunto de trayectorias representativas en el plano fase se llama diagrama fase.
Consideremos las soluciones independientes (\ref{18}).
El vector propio $\hat{\mathbf{K}}_{2}$ se encuentra junto con $y = \dfrac{2}{3}x$ en el primer cuadrante y $\hat{\mathbf{K}}_{1}$ se encuentra junto con $y =-x$ en el segundo cuadrante.
Notamos que en el plano fase las trayectorias tienen flechas que indican dirección. Para saber la dirección de las trayectorias nos apoyaremos en el campo vectorial asociado.
Definamos las funciones $F_{1}$ y $F_{2}$ de acuerdo a (\ref{13}).
$$F_{1}(x, y) = 2x + 3y, \hspace{1cm} y \hspace{1cm} F_{2}(x, y) = 2x + y \label{27} \tag{27}$$
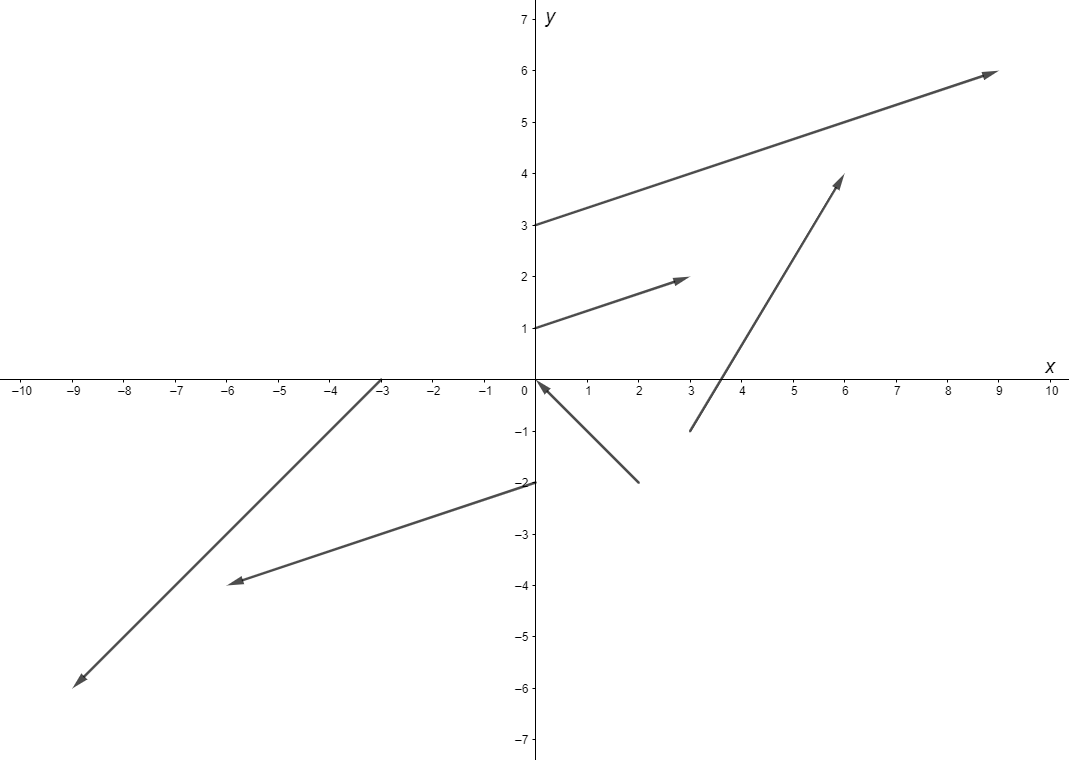
El campo vectorial será descrito por esta función. Como vimos al inicio de la entrada, para cada punto $(x, y)$ del plano fase anclaremos un vector cuya punta termina en la coordenada dada por la suma vectorial $(x, y) + F(x, y)$. Por ejemplo si $x = 0$ y $y = 1$, entonces nos situaremos en la coordenada $(0, 1)$ del plano fase, evaluando en la función $F(x, y)$ se obtiene el punto $F(0, 1) = (3, 1)$, entonces la punta del vector que parte de $(0, 1)$ terminará en la coordenada $(0, 1) + (3, 1) = (3, 2)$.
Como ejemplo dibujemos los vectores correspondientes a las siguientes evaluaciones.
Como se puede notar, si dibujáramos todos los vectores para cada punto $(x, y)$ tendríamos un desastre de vectores, todos de distintos tamaños atravesándose entre sí y no habría forma de observar el patrón que esconde el campo vectorial. Para solucionar este problema existe la convención de escalar todos los vectores a un mismo tamaño, por su puesto esto ya no representa correctamente al campo vectorial, pero sí que es de mucha ayuda visualmente y se convierte en sólo una representación del campo vectorial.
En nuestro ejemplo la función
$$F(x, y) = (2x + 3y, 2x + y)$$
se representa por el siguiente campo vectorial.
Representación del campo vectorial generado por $F(x, y) = (2x + 3y, 2x + y)$.
Cómo $F(x, y) = (x^{\prime}, y^{\prime})$, entonces los vectores del campo vectorial deben ser tangentes a las trayectorias formadas por la función paramétrica $f(t) = (x(t), y(t))$. Concluimos entonces que las soluciones del sistema lineal serán trayectorias cuyos vectores del campo vectorial son tangentes a dichas trayectorias.
Campo vectorial y algunas trayectorias del sistema lineal.
Una característica observable del campo vectorial es que los vectores tienden a alejarse del origen, veremos más adelante que el origen no sólo es una solución constante $x = 0$, $y = 0$ (solución trivial) de todo sistema lineal homogéneo de $2$ ecuaciones lineales, sino que también es un punto importante en el estudio cualitativo de dichos sistemas.
Si pensamos en términos físicos, las puntas de flecha de cada trayectoria en el tiempo $t$ se mueven conforme aumenta el tiempo. Si imaginamos que el tiempo va de $-\infty$ a $\infty$, entonces examinando la solución
muestra que una trayectoria o partícula en movimiento comienza asintótica a una de las semirrectas definidas por $\mathbf{Y}_{1}$ o $ -\mathbf{Y}_{1}$ (ya que $e^{4t}$ es despreciable para $t \rightarrow -\infty$) y termina asintótica a una de las semirrectas definidas por $\mathbf{Y}_{2}$ o $ -\mathbf{Y}_{2}$ (ya que $e^{-t}$ es despreciable para $t \rightarrow \infty$).
El plano fase obtenido representa un diagrama de fase que es característico de todos los sistemas lineales homogéneos de $2 \times 2$ con valores propios reales de signos opuestos.
$\square$
Hemos concluido con el ejemplo. Lo que nos muestra este ejemplo es que es posible hacer un desarrollo geométrico sobre un sistema lineal, sin embargo esto sólo es posible si es un sistema con dos ecuaciones, ya que si aumenta el número de ecuaciones también aumentará el número de dimensiones y ya no seremos capaz de obtener gráficas. Es posible extender el plano fase a tres dimensiones (espacio fase para un sistema lineal con $3$ ecuaciones), pero nos limitaremos sólo a los sistemas de $2$ ecuaciones para hacer más sencilla la tarea. También es importante mencionar que podremos hacer este análisis siempre y cuando los coeficientes sean constantes y las ecuaciones no dependan explícitamente de la variable independiente $t$.
Con este método geométrico será posible estudiar el comportamiento de las soluciones sin la necesidad de resolver el sistema, incluso con este método podremos estudiar sistemas no lineales para los cuales aún no conocemos algún método para resolverlos.
Finalmente veremos que las propiedades del plano fase quedarán determinadas por los valores propios del sistema, de manera que en las siguientes entradas haremos un análisis para cada una de las posibilidades que existen, tales posibilidades son:
Valores propios reales y distintos:
$\lambda_{1} < \lambda_{2} < 0$.
$\lambda_{1} > \lambda_{2} > 0$.
$\lambda_{1} < 0$ y $\lambda_{2} > 0$ (como en nuestro ejemplo).
Valores propios complejos:
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha = 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$.
Valores propios repetidos:
$\lambda_{1} = \lambda_{2} < 0$.
$\lambda_{1} = \lambda_{2} > 0$.
Valores propios nulos:
$\lambda_{1} = 0$ y $\lambda_{2} < 0$.
$\lambda_{1} = 0$ y $\lambda_{2} > 0$.
$\lambda_{1} = \lambda_{2} = 0$.
En las próximas entradas estudiaremos a detalle cada uno de estos casos.
En este enlace se tiene acceso a una excelente herramienta para visualizar el plano fase de sistemas lineales de dos ecuaciones homogéneas con coeficientes constantes y en este enlace se puede visualizar el campo vectorial asociado, además de algunas trayectorias del sistema dando clic sobre el campo vectorial.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
En la unidad anterior resolviste de tarea moral los siguientes sistemas lineales. En este caso realiza un desarrollo geométrico como lo hicimos en esta entrada e intenta describir el comportamiento de las soluciones en el plano fase. Dibuja a mano algunos vectores del campo vectorial y algunas trayectorias sobre el mismo plano fase, posteriormente verifica tu resultado visualizando el espacio fase y el campo vectorial usando los enlaces proporcionados anteriormente.
¿Qué características distintas identificas entre los planos fase de cada uno de los sistemas anteriores?.
Más adelante…
Esta entrada nos ha servido de introducción al estudio geométrico y cualitativo de los sistemas lineales. En la siguiente entrada formalizaremos lo que vimos en esta entrada para posteriormente hacer un análisis más detallado sobre los distintos tipos de sistemas tanto lineales como no lineales que se puedan presentar.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada veremos otras de las propiedades del producto cartesiano. Estas propiedades hacen referencia al comportamiento del producto cartesiano con respecto a las operaciones que definimos antes: unión, intersección, diferencia y diferencia simétrica.
Producto cartesiano y unión
Las siguientes dos proposiciones verifican que el producto cartesiano se distribuye sobre la unión.
Proposición. Para $A,B,C$ conjuntos se cumple que $(A\cup B)\times C=(A\times C)\cup (B\times C)$.
Demostración.
Se tiene que $(x,y)\in (A\cup B)\times C$ si y sólo si $x\in A\cup B$ y $y\in C$ si y sólo si $(x\in A$ o $x\in B)$ y $y\in C$ si y sólo si $(x\in A$ y $y\in C)$ o $(x\in B$ y $y\in C)$ si y sólo si $(x,y)\in A\times C$ o $(x,y)\in B\times C$ si y sólo si $(x, y)\in (A\times C)\cup (B\times C)$.
$\square$
Proposición. Para $A,B,C$ conjuntos se cumple que $A\times (B\cup C)=(A\times B)\cup (A\times C)$.
Demostración.
Se tiene que $(x,y)\in A\times (B\cup C)$ si y sólo si $x\in A$ y $y\in B\cup C$ si y sólo si $x\in A$ y $(y\in B$ o $y\in C)$ si y sólo si $(x\in A$ y $y\in B)$ o $(x\in A$ y $y\in C)$ si y sólo si $(x,y)\in A\times B$ o $(x,y)\in A\times C$ si y sólo si $(x, y)\in (A\times B)\cup (A\times C)$.
$\square$
Proposición. Para cualesquiera $A, B, C, D$ conjuntos no vacíos ocurre que $(A\times C)\cup (B\times D)\subseteq (A\cup B)\times (C\cup D)$.
Demostración.
Sean $A, B, C, D$ conjuntos no vacíos. Tomemos $(x,y)\in (A\times C)\cup (B\times D)$ arbitrario, entonces $(x,y)\in A\times C$ o $(x,y)\in B\times D$.
Si $(x, y)\in A\times C$, entonces $x\in A$ y $y\in C$. Luego, como $A\subseteq A\cup B$ y $C\subseteq C\cup D$ se sigue que $x\in A\cup B$ y $y\in C\cup D$. Así, $(x,y)\in (A\cup B)\times (C\cup D)$.
Si $(x, y)\in B\times D$, entonces $x\in B$ y $y\in D$. Luego, como $B\subseteq A\cup B$ y $D\subseteq C\cup D$ se sigue que $x\in A\cup B$ y $y\in C\cup D$. Así, $(x,y)\in (A\cup B)\times (C\cup D)$.
$\square$
Producto cartesiano e intersección
Con la siguientes dos demostraciones podremos ver que el producto cartesiano se distribuye sobre la intersección.
Proposición. Para $A,B,C$ conjuntos se cumple que $(A\cap B)\times C=(A\times C)\cap (B\times C)$.
Demostración.
Se tiene que $(x,y)\in (A\cap B)\times C$ si y sólo si $x\in A\cap B$ y $y\in C$ si y sólo si $(x\in A$ y $x\in B)$ y $y\in C$ si y sólo si $(x\in A$ y $y\in C)$ y $(x\in B$ y $y\in C)$ si y sólo si $(x,y)\in A\times C$ y $(x,y)\in B\times C$ si y sólo si $(x, y)\in (A\times C)\cap (B\times C)$.
$\square$
Proposición. Para $A,B,C$ conjuntos se cumple que $A\times (B\cap C)=(A\times B)\cap (A\times C)$.
Demostración.
Se tiene que $(x,y)\in A\times (B\cap C)$ si y sólo si $x\in A$ y $y\in B\cap C$ si y sólo si $x\in A$ y $(y\in B$ y $y\in C)$ si y sólo si $(x\in A$ y $y\in B)$ y $(x\in A$ y $y\in C)$ si y sólo si $(x,y)\in A\times B$ y $(x,y)\in A\times C$ si y sólo si $(x, y)\in (A\times B)\cap (A\times C)$.
$\square$
Proposición. Para cualesquiera $A, B, C, D$ conjuntos no vacíos ocurre que $(A\times C)\cap (B\times D)= (A\cap B)\times (C\cap D)$.
Demostración.
Sean $A, B, C, D$ conjuntos no vacíos. Tenemos que: $(x,y)\in (A\times C)\cap (B\times D)$ si y sólo si $(x,y)\in A\times C$ y $(x,y)\in B\times D$ si y sólo si $(x\in A$ y $y\in C)$ y $(x\in B$ y $y\in D)$ si y sólo si $(x\in A$ y $x\in B)$ y $(y\in C$ y $y\in D)$ si y sólo si $x\in A\cap B$ y $y\in C\times D$ si y sólo si $(x,y)\in (A\cap B)\times (C\cap D)$.
$\square$
Producto cartesiano y diferencia
Con los siguientes resultados probamos que el producto cartesiano se distribuye sobre la diferencia.
Proposición. Sean $A, B, C$ conjuntos no vacíos. Se tiene que $A\times (B\setminus C)= (A\times B)\setminus (A\times C)$.
Demostración.
Se tiene que $(x,y)\in A\times (B\setminus C)$ si y sólo si $x\in A$ y $y\in B\setminus C$ si y sólo si $x\in A$ y ($y\in B$ y $y\notin C$) si y sólo si $(x\in A$ y $y\in B)$ y $(x\in A$ y $y\notin C)$ si y sólo si $(x,y)\in A\times B$ y $(x,y)\notin A\times C$ si y sólo si $(x,y)\in (A\times B)\setminus (A\times C)$.
$\square$
Proposición. Para $A,B,C$ conjuntos se cumple que $(A\setminus B)\times C=(A\times C)\setminus (B\times C)$.
Demostración.
Se tiene que $(x,y)\in (A\setminus B)\times C$ si y sólo si $x\in A\setminus B$ y $y\in C$ si y sólo si $(x\in A$ y $x\notin B)$ y $y\in C$ si y sólo si $(x\in A$ y $y\in C)$ y $(x\notin B$ y $y\in C)$ si y sólo si $(x,y)\in A\times C$ y $(x,y)\notin B\times C$ si y sólo si $(x, y)\in (A\times C)\setminus (B\times C)$.
$\square$
Producto cartesiano y diferencia simétrica
La siguiente proposición demuestra que el producto cartesiano distribuye a la diferencia simétrica. Como ya demostramos propiedades de cómo interactúa el producto cartesiano con la unión, intersección y diferencia, podremos dar una demostración muy breve usando álgebra de conjuntos.
Proposición. Sean $A, B, C$ conjuntos. Se tiene que $A\times (B\triangle C)= (A\times B)\triangle (A\times C)$.
Demostración. Procedemos por álgebra de conjuntos:
Muestra que $(X\times Y)\setminus (B\times C)=((X\setminus B)\times Y)\cup(X\times (Y\setminus C))$.
Demuestra que $(A\triangle B)\times C=(A\times C)\triangle (B\times C)$.
Más adelante…
En la siguiente entrada definiremos qué es una relación. Para ello utilizaremos el concepto de producto cartesiano y pareja ordenada. Resultará que una relación es un subconjunto de un producto cartesiano, por lo que es importante que comprendas bien el concepto de producto cartesiano que hemos visto en las últimas dos entradas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»