¡Bienvenidos al curso de Ecuaciones Diferenciales I!
Hola, mi nombre es Omar y te doy la bienvenida al curso de Ecuaciones Diferenciales I el cual escribí como parte del proyecto PAPIME PE104522 Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM, cuyo objetivo principal es:
Comenzar un enfoque unificado y articulado para crear cursos completos, de acceso libre, gratuitos y de calidad, para la impartición y el autoaprendizaje de asignaturas de los primeros semestres de la Licenciatura en Matemáticas de la Facultad de Ciencias de la UNAM.
En este proyecto colaboran académicos y estudiantes de la Facultad de Ciencias de la UNAM, en particular, me ha tocado ser tu instructor en este curso escrito. Con este proyecto buscamos brindar a las nuevas generaciones de científicos alternativas de estudio en los temas relacionados con matemáticas, y no sólo eso, este material esta pensado para que sea utilizado por cualquier persona que quiera adquirir conocimientos en matemáticas a nivel universitario, en este caso particular, en ecuaciones diferenciales. Así mismo, se plantea fomentar una cultura de educación a distancia para que más profesores creen material de calidad y lo pongan a disposición del público en general, de manera gratuita y libre.
Este curso ha sido elaborado en base al temario oficial de la materia de Ecuaciones Diferenciales I impartido en la Facultad de Ciencias de la UNAM.
El curso de Ecuaciones Diferenciales I es una materia obligatoria para estudiantes de las licenciaturas en Actuaría, Matemáticas, Matemáticas Aplicadas, Física y Física Biomédica, todas ellas impartidas en la Facultad de Ciencias de la UNAM.
Esta materia es impartida en cuarto semestre, de manera que se considera que cuentas con conocimientos matemáticos sólidos de los tres semestres anteriores, particularmente de las materias de Calculo Integral y Diferencial I, II y III, además de materias como Geometría Analítica, Álgebra Superior I y II, Álgebra Lineal I y, aunque no es totalmente indispensable, Álgebra Lineal II y Calculo Integral y Diferencial IV (éstas últimas suelen llevarse de forma simultánea con Ecuaciones Diferenciales).
Sin embargo, es importante aclarar que este curso es un primer acercamiento a las ecuaciones diferenciales, lo que significa que partiremos de lo más básico y esencial de tal manera que el aprendizaje sea gradual, adecuado y confortante. Además, ha sido diseñado con un sentido propedéutico, pues se han tomado en cuenta una serie de consideraciones didácticas que hacen de la lectura más agradable, enriquecedora e integradora.
A lo largo de las clases notarás que las entradas cuentan con una presentación y diseño particular. En cada una de ellas hay una introducción al tema, una serie de definiciones precedidas por una motivación, la teoría matemática se construye a profundidad y con formalidad y posteriormente se pone en práctica dicha teoría a través de una serie de ejemplos resueltos paso a paso. Finalmente encontrarás una breve conclusión del tema y una motivación hacía el siguiente, así como una series de ejercicios que puedes realizar de forma optativa en los que pondrás a prueba tus conocimientos adquiridos.
Como complemento a este curso escrito, mi compañero Eduardo Vera ha elaborado una serie de videos en los que se desarrolla gran parte de la teoría que veremos en este curso escrito, si bien los temas en su mayoría son los mismos, el enfoque que se da en cada curso varía, además de que hay algunos temas que sólo encontrarás en la sección de videos o en la sección de notas, así que llevarlos de forma simultánea vuelve más enriquecedor el aprendizaje, sin embargo basta tomar sólo el curso escrito o sólo el curso audiovisual para conocer todo lo relacionado a la materia.
A los largo de las clases encontrarás hipervínculos que redirigen a la entrada anterior, a la posterior, a la página principal del curso y a los videos del tema correspondiente, así como a definiciones, teoremas o ejemplos anteriores, ya sea dentro del mismo curso o de un curso distinto dentro del blog, que requieran ser recordados, permitiendo una fluida conectividad en todo momento del curso.
Finalmente, en este curso se han incluido temas que presentan un mayor desarrollo matemático con el propósito de dar un fundamento teórico a los distintos métodos de resolución de las diferentes ecuaciones diferenciales que presentaremos a lo largo del curso, dichos temas están a disposición del estudiante, pero pueden considerarse opcionales para aquellos estudiantes que no requieran de un profundo conocimiento teórico en sus carreras, esto de ninguna manera interrumpirá el flujo de aprendizaje del curso. Si eres de la licenciatura de Matemáticas sí recomienda revisarlos.
Sin más, espero que disfrutes del curso, adquieras los conocimientos aquí planteados y avances en tu carrera ya sea como estudiante de la Facultad de Ciencias o como estudiante de algunas otras licenciaturas en las que las ecuaciones diferenciales son fundamentales o incluso como estudiante autodidacta interesado en aprender matemáticas.
Si en algún momento algo no queda lo suficiente claro siéntete libre de preguntar en los comentaros del blog, yo, así como otros estudiantes, estaremos atentos y procuraremos responder tus dudas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Una de las cosas más impresionantes sobre las matemáticas es que la gente que la practicano están normalmente interesadas en su aplicación,porque las matemáticasen si mismas son una forma de hermoso arte. – Danica McKellar
Introducción
¡Hemos llegado a la última entrada del curso!
Concluiremos esta unidad con la introducción a un importante teorema de la teoría cualitativa de las ecuaciones diferenciales. El teorema de Poincaré – Bendixson.
La demostración a este teorema suele ser compleja y requiere de definiciones y resultados previos, algunos de ellos sobre topología elemental. En este curso sólo enunciaremos este teorema en una versión simplificada de manera que podamos aplicarlo a los sistemas no lineales de dos ecuaciones diferénciales, por esta razón es que este teorema también se conoce como teorema de Poincaré – Bendixson en el plano.
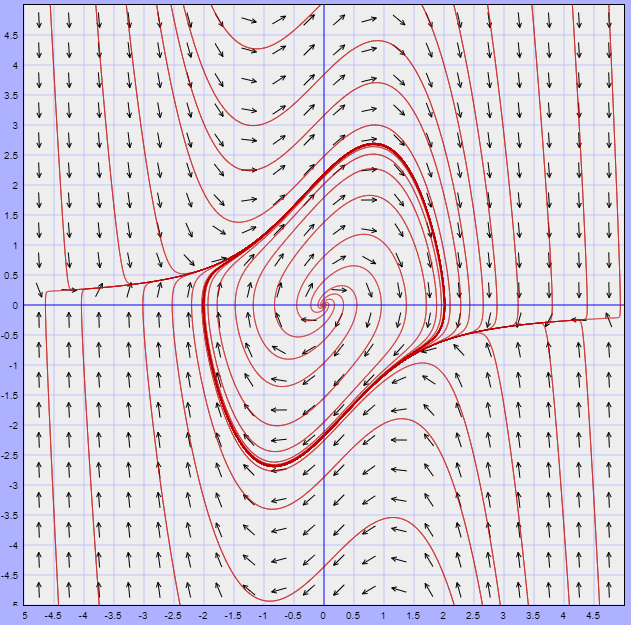
En la entrada sobre linearización visualizamos el plano fase del sistema
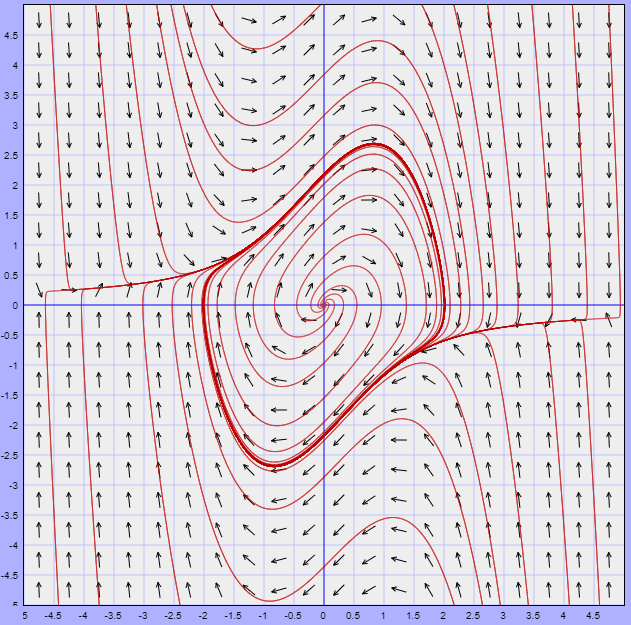
Para el caso en el que $\mu = 1$. Dicho plano fase fue el siguiente.
Plano fase del sistema.
El sistema (\ref{1}) en realidad se deduce de la ecuación diferencial de segundo orden
$$\dfrac{d^{2}y}{dt^2} + \mu(y^{2} -1) \dfrac{dy}{dt}+ y = 0 \label{2} \tag{2}$$
la cual lleva por nombre ecuación de Van der Pol y representa el movimiento de un oscilador con amortiguamiento no lineal.
Lo que podemos observar del plano fase es que existe una trayectoria límite (resaltada en rojo) que de alguna manera divide al plano fase en secciones. Si nos concentramos en la trayectoria periódica formada, entonces podemos hablar de la zona interior y la zona exterior a dicha trayectoria y lo que observamos es que por fuera de ella todas las trayectorias tienden a la trayectoria periódica, mientras que dentro de ella todas se alejan del origen para aproximarse, de igual manera, a la trayectoria límite.
Esto es lo que se conoce como un ciclo límite y lo presentan algunos sistemas no lineales. El teorema de Poincaré – Bendixson nos dará las condiciones necesarias para asegurar que un sistema no lineal presenta ciclos límites.
Antes de continuar haremos un breve paréntesis para recordar un par de resultados importantes de las coordenadas polares que nos servirán para hacer más sencillos los cálculos de los ejemplos que realicemos más adelante.
Coordenadas polares
Las coordenadas cartesianas se relacionan con las polares a través de las siguientes relaciones.
\begin{align*} x &= r \cos(\theta) \\ y &= r \sin(\theta) \label{3} \tag{3} \end{align*}
Es sencillo hacer notar que el único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$.
Utilizando las relaciones (\ref{5}) y (\ref{6}) podemos transformar el sistema en coordenadas polares. Comencemos por obtener la ecuación diferencial para $r$, para ello sustituyamos $x^{\prime}$ y $y^{\prime}$ del sistema (\ref{7}) en la ecuación (\ref{5}).
Este sistema esta desacoplado, de manera que podemos resolver cada ecuación por separado para obtener las funciones $r(t)$ y $\theta(t)$ explícitamente.
Comencemos con la ecuación de $r^{\prime}$. Dicha ecuación es separable.
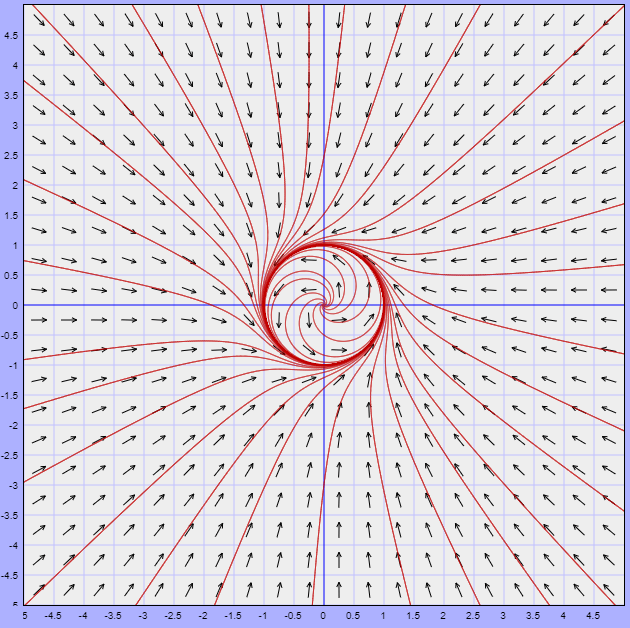
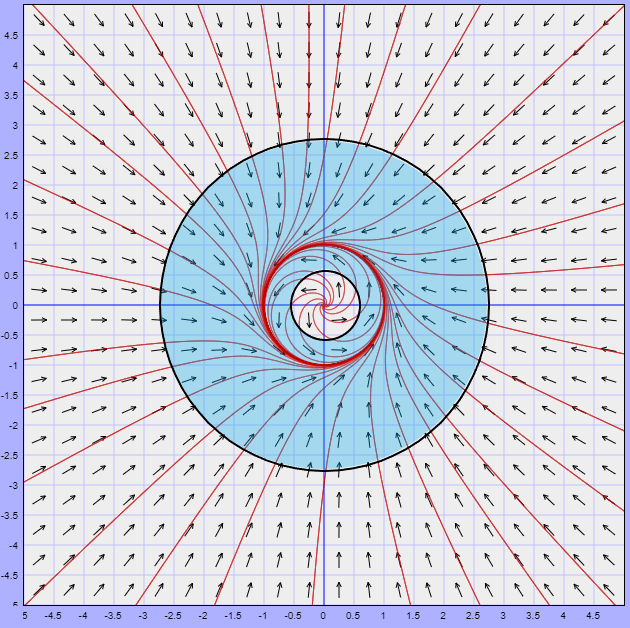
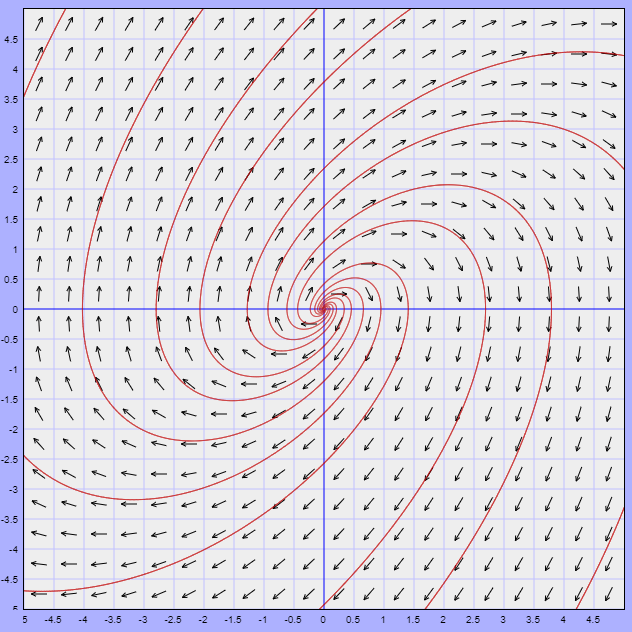
Lo que obtenemos es una curva cerrada o ciclo límite correspondiente a una trayectoria periódica para $r = 1$ y todas las demás trayectorias se acercan en espiral desde el exterior y el interior cuando $t \rightarrow \infty$, tal como se muestra en la siguiente figura.
Plano fase del sistema.
Nota: Este plano fase está definido con las trayectorias dadas por (\ref{15}), es decir, corresponde al plano $XY$.
Lo que hemos hecho es probar que el sistema no lineal (\ref{7}) tiene una trayectoria periódica, pero lo hemos hecho resolviendo el sistema explícitamente. Sin embargo, no siempre será sencillo resolver las ecuaciones involucradas, desearíamos de alguna manera saber si un sistema no lineal tiene o no trayectorias periódicas, pero sin conocer las soluciones explícitas. ¡Esto es posible con ayuda del teorema de Poincaré – Bendixson!.
La definición formal de ciclo límite es la siguiente.
Definición: Se dice que una curva cerrada es un ciclo límite de un sistema no lineal (\ref{19}) si existen trayectorias que describen espirales que se acercan o alejan de ella.
Definición: Se dice que un ciclo límite es estable si todas las órbitas de (\ref{19}) que pasan suficientemente cerca de la curva cerrada describen espirales que tienden finalmente hacia ella. En caso contrario, se dice que es inestable.
En el ejemplo visto es claro que se trata de un ciclo límite estable.
En este caso, para que sean claras las siguientes definiciones, detonaremos a una solución del sistema (\ref{19}) como $Y(t; x, y)$ indicando que tanto $x$ como $y$ dependen de la variable $t$.
Definición: Un punto $Y_{0} = (x_{0}, y_{0})$ que pertenece a $\mathbb{R}^{2}$ (plano fase) se dice que es un punto $\omega -$límite (omega límite) de la trayectoria $Y(t; x, y)$ del sistema (\ref{19}) si existe una sucesión $t_{n} \rightarrow \infty$, tal que $$\lim_{n \to \infty} Y(t_{n}; x, y) = Y_{0} \label{20} \tag{20}$$
Definición: Un punto $Y_{0} = (x_{0}, y_{0})$ que pertenece a $\mathbb{R}^{2}$ (plano fase) se dice que es un punto $\alpha -$límite (alfa límite) de la trayectoria $Y(t; x, y)$ del sistema (\ref{19}) si existe una sucesión $t_{n} \rightarrow -\infty$, tal que $$\lim_{n \to \infty} Y(t_{n}; x, y) = Y_{0} \label{21} \tag{21}$$
Definición: El conjunto de todos los puntos $\omega -$límite de una trayectoria $Y(t; x, y)$ se le llama conjunto $\omega -$límite de $Y$ y se denota como $\omega(Y)$.
Definición: El conjunto de todos los puntos $\alpha -$límite de una trayectoria $Y(t; x, y)$ se le llama conjunto $\alpha -$límite de $Y$ y se denota como $\alpha(Y)$.
Definición: El conjunto de todos los puntos limite de $Y(t; x, y)$, $\alpha(Y) \cup \omega(Y)$, es el conjunto límite de $Y(t; x, y)$.
Ejemplo: Un sistema lineal cuyo punto de equilibrio es nodo atractor
Nodo atractor
tiene como punto $\omega -$límite al punto $Y_{0} = (0, 0)$, ya que cualquier trayectoria $Y(t_{n}; x, y)$ tiende a dicho punto para $t_{n} \rightarrow \infty$. Mas aún, el conjunto $\omega -$límite es $\omega(Y) = \{ (0, 0) \}$.
$\square$
Los conjuntos $\alpha -$límite y $\omega -$límite se pueden describir como el lugar geométrico donde nace y muere la trayectoria de la solución de un sistema dinámico dado.
En el primer ejemplo visto anteriormente obtuvimos una trayectoria periódica definida por la circunferencia $x^{2} + y^{2} = 1$, o bien $r = 1$. De acuerdo al plano fase, dicha circunferencia es un conjunto $\omega -$límite tanto para las trayectorias $Y(t; x, y)$ fuera de la circunferencia unitaria $(r > 0)$ como para las trayectorias $Y(t; x, y)$, dentro de la circunferencia unitaria $(r < 1)$.
Definición: Un conjunto $U$ en el plano es positivamente invariante si para todo punto $(x, y) \in U$, $Y(t; x, y) \in U$ para todo $t \geq 0$.
Definición: Un conjunto $U$ en el plano es negativamente invariante si para todo punto $(x, y) \in U$, $Y(t; x, y) \in U$ para todo $t \leq 0$.
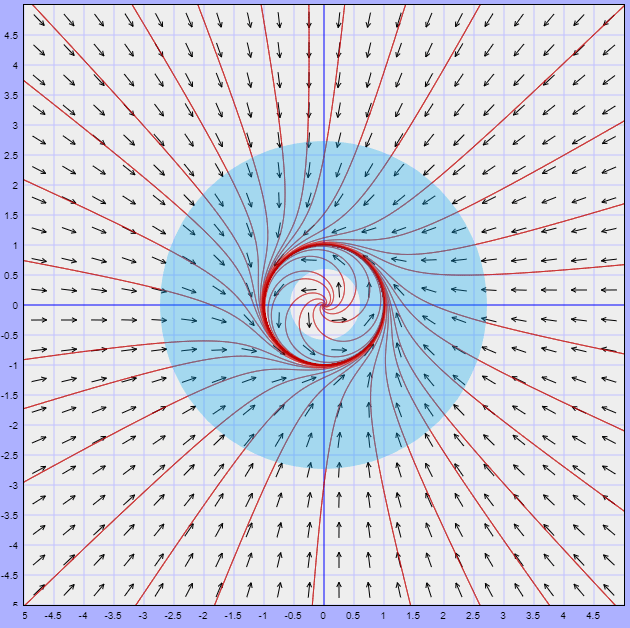
Observando nuevamente el plano fase del sistema del ejemplo desarrollado, es posible encontrar un región por fuera de la circunferencia unitaria en la que las trayectorias se comiencen a trazar a partir de $t = 0$. Lo mismo se puede hacer en una región dentro de la circunferencia unitaria, de manera que dicha circunferencia quede completamente contenida en la unión de ambas regiones. Esto lo sabemos de los resultados (\ref{17}) y (\ref{18}).
Conjunto positivamente invariante.
Dicha unión de conjuntos corresponde al conjunto $U \subset \mathbb{R}^{2}$, en este caso, positivamente invariante ya que para todo punto $(x, y) \in U$ las trayectorias $Y(t; x, y) \in U$ para todo $t \geq 0$.
Ahora conocemos los conceptos básicos que nos permitirán comprender el teorema de Poincaré – Bendixson. Cabe mencionar que existen varias formas de enunciar este teorema dependiendo incluso de la profundidad teórica que se este tratando, sin embargo el resultado siempre será el mismo. Lo que haremos en este curso será enunciar el teorema de Poincaré-Bendixson de una forma un poco intuitiva, posteriormente lo enunciaremos nuevamente de forma formal y como corolarios de este teorema enunciaremos dos resultados importantes que incluso se pueden encontrar como enunciados del mismo teorema de Poincaré – Bendixson.
Comenzamos por enunciar el teorema de Poincaré – Bendixson de forma intuitiva.
Teorema: Sean $\varphi_{1}$ y $\varphi_{2}$ dos curvas cerradas en el plano fase del sistema no lineal \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \end{align*} con $\varphi_{2}$ en el interior de $\varphi_{1}$. Entonces si en cada punto de la curva $\varphi_{1}$ el vector está dirigido hacia el interior de $\varphi_{1}$ y en cada punto de la curva $\varphi_{2}$ el vector está dirigido hacia el exterior de $\varphi_{2}$, entonces se puede afirmar que al menos existe un ciclo límite comprendido entre $\varphi_{1}$ y $\varphi_{2}$.
Si recurrimos una vez más a nuestro ejemplo, podemos tomar la curva $\varphi_{1}$ como la frontera exterior del conjunto $U$, mientras que la curva $\varphi_{2}$ como la frontera interior del mismo conjunto.
Curvas que definen al conjunto positivamente invariante.
Lo que observamos es que el campo vectorial sobre los puntos de la curva $\varphi_{1}$ está dirigido hacia el interior de dicha curva, mientras que el campo vectorial sobre los puntos de la curva $\varphi_{2}$ está dirigido hacia el exterior. Es decir, en ambos casos el campo vectorial incide a la región positivamente invariante $U$ y sabemos que efectivamente hay una un ciclo límite comprendido entre ambas trayectorias.
Enunciemos ahora el teorema de Poincaré – Bendixson de manera más formal.
Teorema: Sea $Y(t; x, y)$ una solución del sistema no lineal \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \end{align*} que permanece en una región acotada del plano que no contiene puntos de equilibrio del sistema. Entonces su trayectoria debe describir una espiral que se aproxima a una curva cerrada simple, la cual a su vez es la trayectoria de una solución periódica del sistema no lineal.
En esta entrada no demostraremos el teorema de Poincaré – Bendixson, sin embargo, en la sección de videos se ha hecho un enorme esfuerzo por desarrollar con detalle la teoría previa para su demostración, así como la demostración del teorema. Se recomienda visitar la entrada.
Antes de realizar algunos ejemplos enunciemos dos resultados importantes que se deducen del teorema de Poincaré – Bendixson.
Corolario: Un conjunto cerrado, acotado y no vacío $U \subset \mathbb{R}^{2}$, que es positivamente invariante (o negativamente invariante) contiene una trayectoria periódica o un punto de equilibrio.
Corolario: Si una solución $Y(t; x, y)$ de un sistema no lineal (\ref{19}) entra a una región cerrada y acotada $U \subset \mathbb{R}^{2}$ y no sale, y además la región no contiene puntos de equilibrio, entonces $Y(t; x, y)$ se aproxima a una trayectoria periódica. En particular, la región contiene una trayectoria periódica.
Concluiremos esta entrada realizando algunos ejemplos en los que apliquemos el teorema de Poincaré – Bendixson, así como ambos corolarios para determinar que los sistemas no lineales estudiados presentan soluciones periódicas.
Ejemplo: Demostrar que el siguiente sistema no lineal tiene una trayectoria periódica.
\begin{align*} x^{\prime} &= x -y -\left( x^{2} + \dfrac{3}{2}y^{2} \right)x \\ y^{\prime} &= x + y -\left( x^{2} + \dfrac{1}{2}y^{2} \right)y \end{align*}
Solución: Por su puesto que intentar resolver el sistema para conocer explícitamente a la trayectoria periódica puede ser muy complicado, incluso si conociéramos métodos de resolución. Para poder aplicar el teorema de Poincaré – Bendixson lo que haremos será encontrar una región $U \subset \mathbb{R}^{2}$ que sea positivamente (o negativamente) invariante y que no contenga puntos de equilibrio del sistema.
Como ejercicio moral muestra que el único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$. Esto nos indica que la región $U$ no debe contener al origen.
Nuevamente usemos coordenadas polares con la intención de hallar el intervalo en el que $r$ puede estar comprendido y cuyos valores extremos definan la región $U$ que buscamos.
Sustituyamos $x^{\prime}$ y $y^{\prime}$ del sistema no lineal en la ecuación (\ref{5}).
\begin{align*} r r^{\prime} &= x \left[ x -y -\left( x^{2} + \dfrac{3}{2}y^{2} \right) x \right] + y \left[ x + y -\left( x^{2} + \dfrac{1}{2}y^{2} \right) y \right] \\ &= x^{2} + y^{2} -x^{4} -\dfrac{1}{2}y^{4} -\dfrac{5}{2}x^{2}y^{2} \\ &= (x^{2} + y^{2}) -(x^{4} +2x^{2}y^{2} + y^{4}) + \dfrac{1}{2}y^{4} -\dfrac{1}{2}x^{2}y^{2} \\ &= r^{2} -r^{4} + \dfrac{1}{2}y^{2}(y^{2} -x^{2}) \end{align*}
En el siguiente procedimiento haremos uso de las identidades trigonométricas
Para encontrar la región $U$ que contenga a la trayectoria periódica se debe hacer $r^{\prime} = 0$, debido a que tal región debe ser tangente a la trayectoria periódica en algún punto en el cual $r^{\prime} = 0$, entonces
es un conjunto positivamente invariante. Esto quiere decir que para cualquier punto que se tome en el conjunto $U$, la trayectoria por este punto permanecerá en tal conjunto.
Como el punto de equilibrio $(0, 0)$ no pertenece a $U$, entonces por el teorema de Poincaré – Bendixson se concluye que existe una trayectoria periódica contenida en $U$.
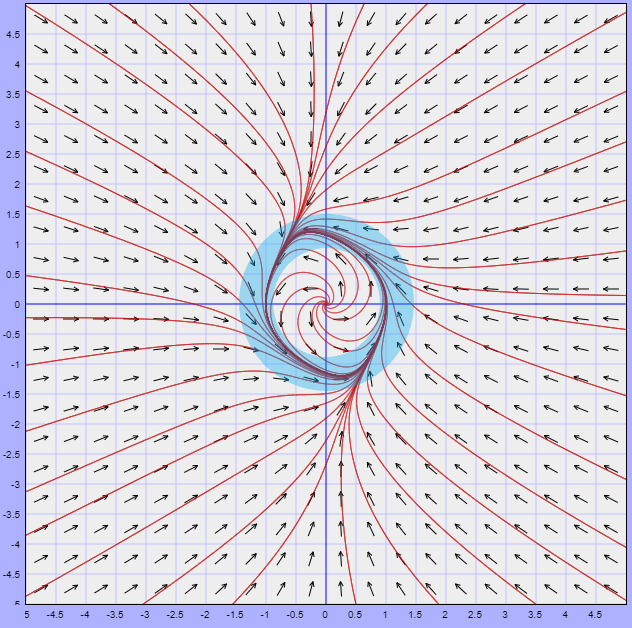
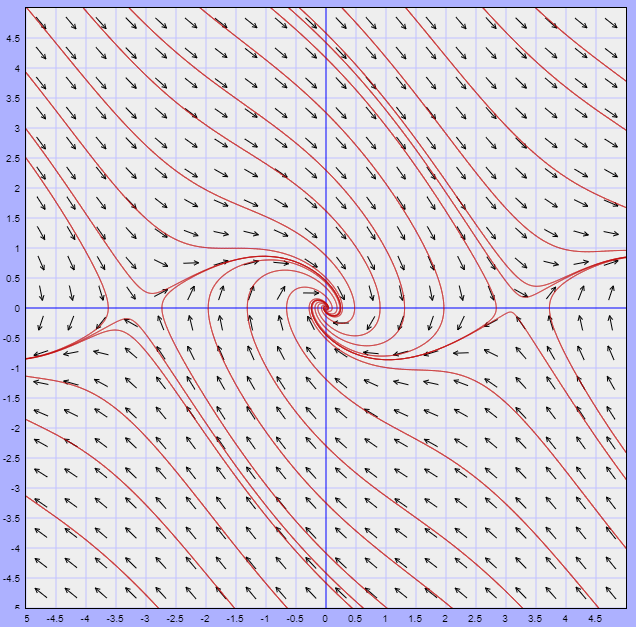
El plano fase del sistema no lineal, indicando la región $U$, se muestra a continuación.
Plano fase del sistema indicando la región positivamente invariante.
En la figura observamos que efectivamente la región $U$ contiene un conjunto límite correspondiente a una trayectoria periódica del sistema no lineal.
$\square$
Realicemos un ejemplo más.
Ejemplo: Mostrar que el siguiente sistema no lineal tiene por lo menos una trayectoria periódica.
Solución: El punto $Y_{0} = (0, 0)$ es el único punto de equilibrio del sistema. Debemos construir una región $U$ en la cual se pueda aplicar el Teorema de Poincaré – Bendixson.
Esta desigualdad nos define la región $U$. Notemos que $r^{\prime} > 0$ para $x^{2} + y^{2} < \dfrac{1}{2}$. En este caso, cualquier trayectoria por el punto
es positivamente invariante. Es decir, para cualquier punto que se tome en el conjunto $U$, la trayectoria por dicho punto permanecerá allí para $t \geq 0$. Como el origen no esta contenido en la región $U$, entonces es posible aplicar el Teorema de Poincaré – Bendixson mostrando así que existe al menos una órbita periódica en dicha región.
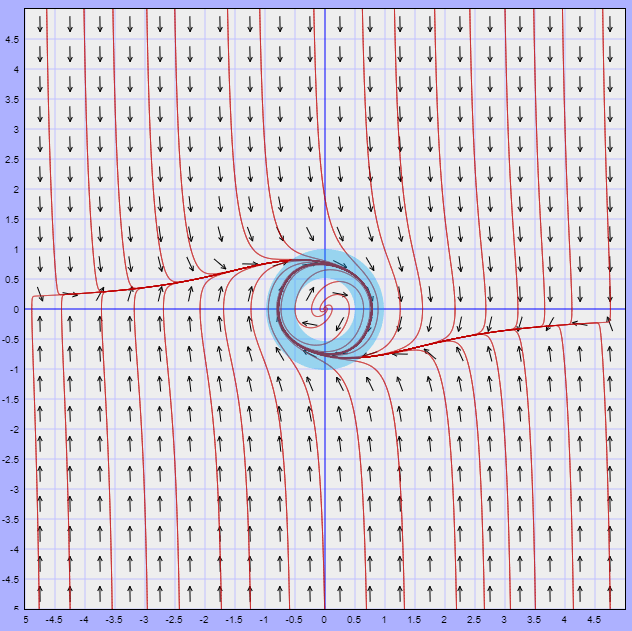
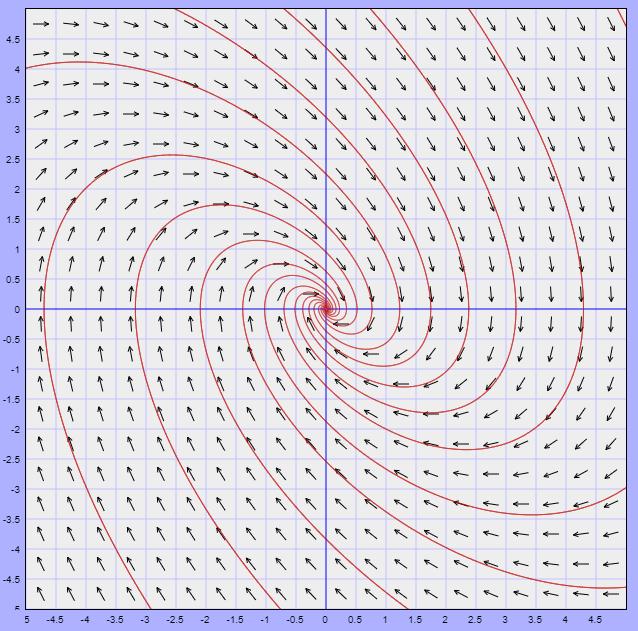
El plano fase del sistema, indicando la región $U$, es el siguiente.
Plano fase del sistema indicando la región positivamente invariante.
Efectivamente existe una trayectoria periódica contenida en la región $U$.
$\square$
Concluyamos con un último ejemplo.
Ejemplo: Mostrar que el siguiente sistema no lineal tiene por lo menos una trayectoria periódica.
Solución: El único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$. Determinemos la región $U$ en la que podamos aplicar el teorema de Poincaré – Bendixson.
Sustituyamos las ecuaciones $x^{\prime}$ y $y^{\prime}$ del sistema en la ecuación (\ref{5}).
Este importante resultado nos indica que la región $U$ se puede dividir en dos regiones en las que una de ellas será positivamente invariante y la otra negativamente invariante, dichas regiones son.
Es claro que $U_{1}$ es un conjunto negativamente invariante y $U_{2}$ un conjunto positivamente invariante.
Como ninguna de ambas regiones contiene al punto de equilibrio, entonces podemos aplicar el teorema de Poincaré – Bendixson sobre cada una de las regiones deduciendo que en cada una de ellas existe una trayectoria periódica que corresponden a soluciones periódicas del sistema no lineal.
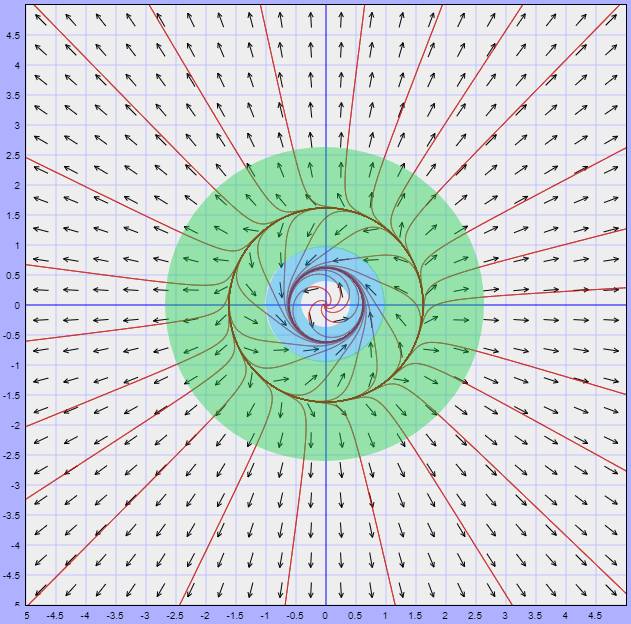
El plano fase del sistema, indicando ambas regiones, es el siguiente.
Plano fase del sistema indicando ambas regiones invariantes.
En este ejemplo mostramos que el sistema no lineal tiene dos trayectorias periódicas como solución.
$\square$
Felicidades, ¡Hemos concluido el curso!
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Mostrar que los siguientes sistemas no lineales tienen por lo menos un trayectoria periódica. Verifica tu resultado visualizando el plano fase del sistema.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Algún matemático dijo que el verdadero placer no reside en el descubrimiento de la verdad, sino en su búsqueda. – Tolstoy
Introducción
Hemos comenzado con el estudio cualitativo de los sistemas no lineales. Hasta este momento sólo somos capaces de predecir el comportamiento de las soluciones de un sistema no lineal alrededor de los puntos de equilibrio. Vimos que para hacerlo debemos encontrar el sistema lineal cuyas soluciones mejor se aproximen a las del sistema no lineal, a tal proceso se le conoce como linearización.
Nuestro propósito es esbozar de manera general el plano fase de un sistema no lineal, o al menos describir las trayectorias en zonas lejanas a los puntos de equilibrio.
En esta entrada veremos como hacer una descripción más general del plano fase a través de un método geométrico.
Nulclinas
Definición: Dado el sistema de ecuaciones diferenciales no lineales \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \label{1} \tag{1} \end{align*}Se define la nulclina $x$ como el conjunto de puntos $(x, y)$, tales que $F_{1}(x, y) = 0$. De forma similar, se define la nulclina $y$ como el conjunto de puntos $(x, y)$, tales que $F_{2}(x, y) = 0$
Una observación de la definición anterior es que las nulclinas corresponden a las curvas de nivel de las funciones $F_{1}$ y $F_{2}$
\begin{align*} F_{1}(x, y) &= c \\ F_{2}(x, y) &= c \label{2} \tag{2} \end{align*}
en el caso en el que $c = 0$.
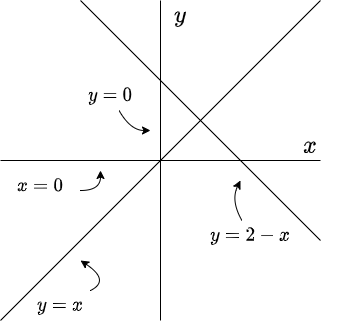
Ejemplo: Determinar las nulclinas del siguiente sistema no lineal.
Para obtener la nulclina $x$ (o nulclinas $x$) hacemos $F_{1}(x, y) = 0$, es decir
$$x(2 -x -y) = 0$$
de donde $x = 0$ o $2 -x -y = 0$. Una primer nulclina $x$ corresponde al eje $y$ del plano fase ya que $x = 0$. De la segunda expresión se obtiene la función $y(x) =2 -x$, la cual corresponde a una recta con pendiente negativa. Dicha recta es una segunda nulclina $x$.
Para obtener las nulclinas $y$ hacemos $F_{2}(x, y) = 0$, es decir,
$$y(y -x) = 0$$
de donde $y = 0$ o $y -x = 0$. En este caso una nulclina $y$ corresponde al eje $x$ del plano fase ya que $y = 0$, mientras que la segunda nulclina corresponde a la recta definida por la función $y(x) =x$.
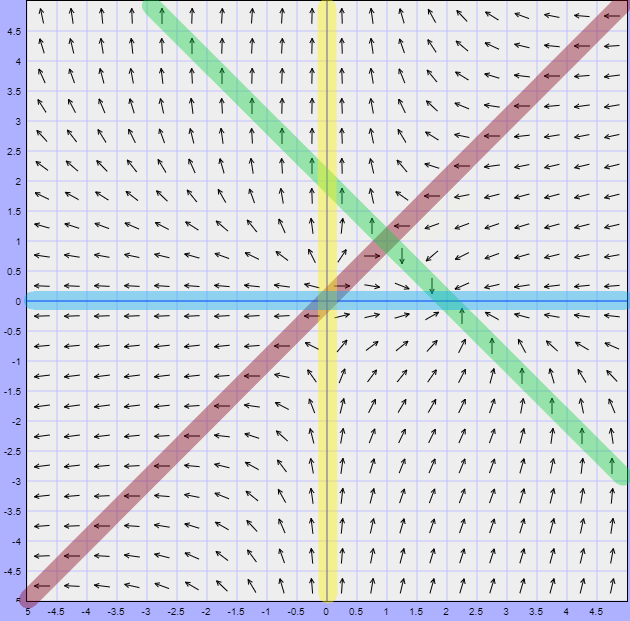
Por lo tanto, las rectas $x = 0$ (eje $y$), $y = 0$ (eje $x$), $y(x) =x$ y $y(x) =2 -x$ son las nulclinas del sistema no lineal. A continuación se muestran las nulclinas en el plano fase (o plano $XY$).
Nulclinas del sistema.
$\square$
¿Y de qué nos sirven las nulclinas?. Consideremos la función vectorial
De acuerdo a la definición de nulclinas notamos enseguida que, en general, el campo vectorial sobre una nulclina siempre será vertical (apuntará hacia arriba o hacia abajo) o será horizontal (apuntará hacia la izquierda o a la derecha) dependiendo de qué componente de la función vectorial (\ref{3}) sea cero.
Supongamos que los puntos $(x_{0}, y_{0})$ pertenecen a la nulclina $x$, entonces, por definición, se cumple
en este caso el campo vectorial en el punto $(x_{0}, y_{0})$ será vertical ya que no hay componente horizontal y apuntará hacia arriba si $F_{2}(x_{0}, y_{0}) > 0$ o hacia abajo si $F_{2}(x_{0}, y_{0}) < 0$.
De forma similar, si los puntos $(x_{0}, y_{0})$ pertenecen a la nulclina $y$, entonces se cumple
es decir, el campo vectorial será horizontal a lo largo de la nulclina $y$. Apuntará a la izquierda si $F_{1}(x_{0}, y_{0}) < 0$ o a la derecha si $F_{2}(x_{0}, y_{0}) > 0$.
Notemos otro hecho importante. Por definición, un punto de equilibrio satisface que
Eso significa que existe un punto $(x_{0}, y_{0})$ que esta tanto en la nulclina $x$ como en la nulclina $y$, en otras palabras, las intersecciones entre nulclinas corresponden a los puntos de equilibrio del sistema no lineal.
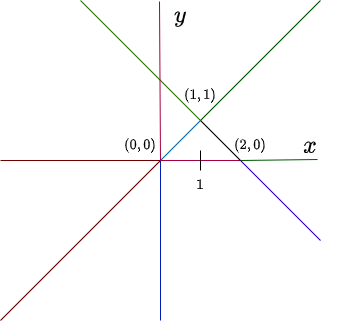
Ejemplo: Determinar los puntos de equilibrio así como la dirección del campo vectorial sobre las nulclinas del sistema no lineal del ejemplo anterior.
De la primer ecuación tenemos $x = 0$ o $2 -x -y = 0$, de la segunda relación se obtiene $y = 2 -x$. Por otro lado, de la segunda ecuación tenemos $y = 0$ o $y -x = 0$. Sustituyendo $x = 0$, entonces $y = 0$, por lo tanto, un punto de equilibrio es el origen $Y_{0} = (0, 0)$.
Si sustituimos $y = 2-x$ en $y -x = 0$ se tiene
$$(2 -x) -x = 2 -2x = 0$$
de donde $x = 1$, así $y = 2 -1 =1$, por tanto, otro punto de equilibrio es $Y_{1} = (1, 1)$.
Finalmente si $y = 0$, entonces $x = 2$, así el punto $Y_{2} = (2, 0)$ es otro punto de equilibrio.
Recordemos que las nulclinas del sistema están definidas por las rectas $x = 0$, $y = 0$, $y = x$ y $y = 2 -x$. Verifica que los puntos de equilibrio
efectivamente corresponden a los puntos de intersección entre las nulclinas del sistema.
¿Por qué el punto $(0, 2)$ no es un punto de equilibrio si es también la intersección de dos nulclinas?.
Ahora veamos que dirección tiene el campo vectorial sobre cada nulclina.
Lo primero que debemos notar es que cada nulclina está definida en intervalos.
Distintos intervalos para las nulclinas.
El eje $y$ (nulclina $x = 0$) se debe estudiar en los intervalos $y \in (-\infty, 0), (0, \infty)$.
El eje $x$ (nulclina $y = 0$) se debe estudiar en los intervalos $x \in (-\infty, 0), (0, 2), (2, \infty)$.
La nulclina definida por $y(x) = x$ se debe estudiar en los intervalos en los que $x \in (-\infty, 0), (0, 1), (1, \infty)$.
Finalmente, la nulclina definida por $y(x) = 2 -x$ se debe estudiar en los intervalos $x \in (-\infty, 1), (1, 2), (2, \infty)$.
Determinemos la dirección de los vectores en cada intervalo de cada nulclina apoyándonos de la función vectorial
$$F(x, y) = (x(2 -x -y), y(y -x))$$
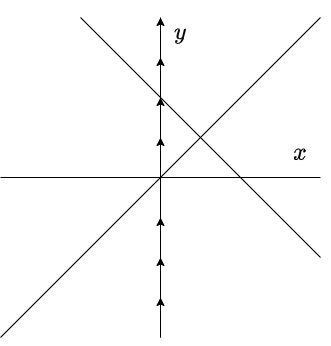
Comencemos por la nulclina $x$ definida por $x = 0$. Si $x = 0$, entonces
$$F(0, y) = (0, y^{2})$$
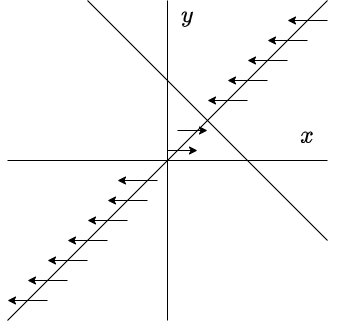
como $y^{2} > 0$ en todo momento, es decir para $y \in (-\infty, 0)$ y $y \in (0, \infty)$, entonces el campo vectorial sera vertical apuntando hacia arriba.
Dirección del campo vectorial sobre la nulclina definida por $x = 0$.
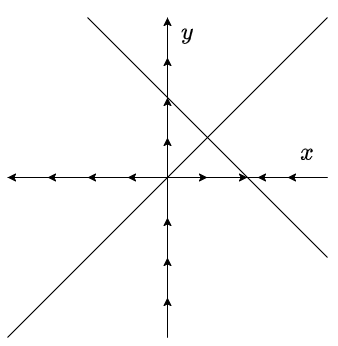
Para el caso de la nulclina $y$ definida por $y = 0$, se tiene
$$F(x, 0) = (2x -x^{2}, 0)$$
Comencemos con $x \in (-\infty, 0)$. Si $x < 0$, entonces $2x < 0$ y claro está que $-x^{2} < 0$, por tanto, en dicho intervalo $2x -x^{2} < 0$, esto significa que el campo vectorial será horizontal señalando hacia la izquierda.
Si $x \in (0, 2)$, entonces $x > 0$, o bien $2x > 0$ y $-x^{2} < 0$, es sencillo notar que dentro del intervalo que estamos considerando se cumple que $2x -x^{2} > 0$, por tanto, el campo apuntará a la derecha
Finamente, si $x \in (2, \infty)$, es claro que $2x -x^{2} < 0$, así que el campo volverá a apuntar hacia la izquierda.
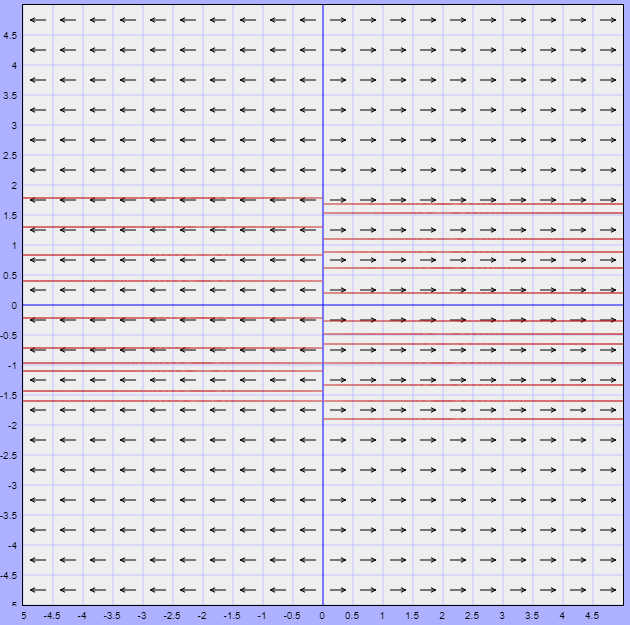
Campo vectorial sobre las nulclinas definidas por $y = 0$ y $x = 0$.
Consideremos ahora la nulclina $y$ definida por $y = x$, en este caso el campo vectorial esta dado por
$$F(y, y) = (2y -2y^{2}, 0)$$
o bien,
$$F(x, x) = (2x -2x^{2}, 0)$$
En el intervalo $x \in (-\infty, 0)$, se cumple que $x < 0$, $2x < 0$ y claro es que $-2x^{2} < 0$, así en dicho intervalo $2x -2x^{2} < 0$, por lo tanto, el campo vectorial es horizontal y apunta hacia la izquierda.
Si $x \in (0,1)$, entonces $2x -2x^{2} > 0$, el campo apuntará a la derecha y finalmente volverá a apuntar a la izquierda para $x \in (1, \infty )$, ya que $2x -2x^{2} < 0$.
Campo vectorial sobre la nulclina definida por $y(x) = x$.
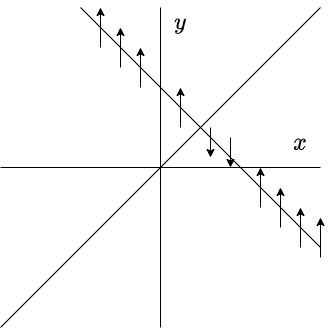
Finalmente, para la nulclina $x$ definida por $y = 2 -x$, se tiene
$$F(x, 2 -x) = (0, 2x^{2} -6x + 4)$$
Es posible verificar que si $x \in (-\infty, 1)$, entonces
$$2x^{2} -6x + 4 > 0$$
Si $x \in (1, 2)$, entonces
$$2x^{2} -6x + 4 < 0$$
y si $x \in (2, \infty)$ se cumple que
$$2x^{2} -6 + 4 > 0$$
Por lo tanto, el campo vectorial apuntará hacia arriba, luego hacia abajo y después nuevamente hacia arriba, respectivamente.
Campo vectorial sobre la nulclina definida por $y(x) = 2 -x$.
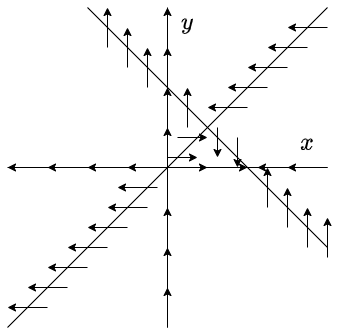
Por lo tanto, el campo vectorial sobre cada nulclina se ve de la siguiente forma.
Campo vectorial sobre las nulclinas del sistema.
$\square$
Recordemos que el campo vectorial es tangente a las trayectorias del sistema y la dirección indica la evolución de dichas trayectorias conforme $t \rightarrow \infty$, de manera que ahora tenemos una idea, aunque puede ser un poco vaga, de como se puede ir viendo el plano fase del sistema.
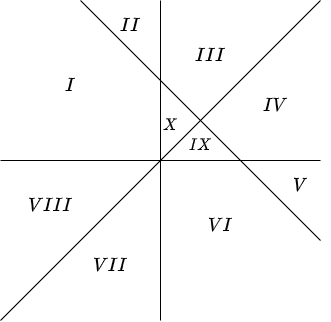
Una última observación que hacemos es que las curvas que representan a las nulclinas dividen al plano en varias regiones. En el ejemplo anterior se forman 10 regiones distintas las cuales se muestran en la siguiente figura.
Regiones limitadas por las nulclinas del sistema no lineal estudiado.
Esto nos permitirá esbozar el campo vectorial sobre cada región y con ello podremos trazar trayectorias obteniendo así una representación más general del plano fase de un sistema no lineal.
Ejemplo: Intentar esbozar el plano fase del sistema no lineal estudiado.
Solución: Hasta este momento conocemos los puntos de equilibrio del sistema, las nulclinas y la dirección del campo vectorial sobre cada una de ellas.
Lo que se puede hacer es determinar un vector aleatorio sobre cada una de las regiones limitadas por las nulclinas del sistema y en base a él aproximar una solución apoyándose también de los vectores ubicados sobre las nulclinas. En el segundo video de la sección de videos de este curso puedes encontrar el desarrollo de este método.
Debido a que a nosotros nos resulta más difícil dibujar algunas trayectorias, lo que haremos es utilizar nuestra herramienta de costumbre para visualizar el campo vectorial del sistema.
Campo vectorial del sistema no lineal indicando las nulclinas.
En esta figura visualizamos el campo vectorial del sistema, así como sobre las nulclinas.
Lo primero que se puede hacer es linealizar el sistema con respecto a cada uno de los puntos de equilibrio. Recordemos que la función vectorial $F$ es
Por lo tanto, los sistemas lineales que se aproximan a la descripción de las trayectorias del sistema no lineal alrededor de los puntos de equilibrio son:
Plano fase del sistema linealizado en el punto de equilibrio $Y_{2} = (2, 0)$.
Con el conocimiento de la forma de las trayectorias alrededor de los puntos de equilibrio y con la dirección del campo vectorial sobre algunos puntos del plano fase, entre ellos sobre las nulclinas, es que podemos esbozar completamente el plano fase del sistema no lineal.
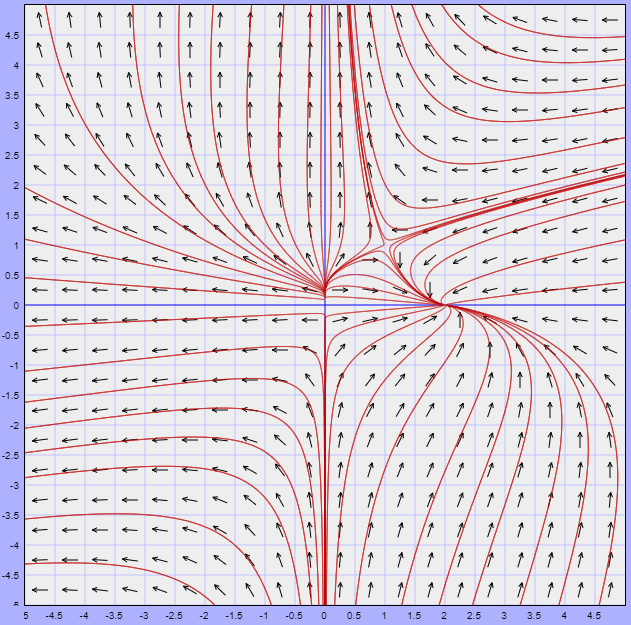
En este caso, el plano fase correspondiente al sistema no lineal estudiado es
Plano fase y campo vectorial del sistema.
El flujo de las trayectorias es algo que ya intuíamos al considerar toda la información que estuvimos desarrollando sobre el sistema a lo largo de la entrada.
$\square$
Con esto concluimos el estudio cualitativo de algunos sistemas no lineales sencillos.
En la siguiente entrada estudiaremos un comportamiento interesante que presentan las trayectorias de algunos sistemas no lineales y cuya descripción se establece en el conocido teorema de Poincaré – Bendixon.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Hacer un bosquejo del plano fase de los siguientes sistemas no lineales siguiendo el método desarrollado a lo largo de la unidad. (Recuerda que el propósito es esbozar el plano fase a mano, una vez que concluyas puede comparar tu resultado con el obtenido usando una computadora.)
¿Qué se observa de este sistema no lineal?. ¿Hay alguna dificultad en esbozar el plano fase?.
Más adelante…
Ahora somos capaces de hacer un estudio cualitativo de algunos sistemas no lineales, sin embargo existen situaciones en las que un sistema no lineal presenta un comportamiento interesante en el que las trayectorias tienden a una curva cerrada conocida como ciclo límite. En la siguiente y última entrada del curso estudiaremos la descripción de estos sistemas y enunciaremos el teorema de Poincaré – Bendixson en el plano.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
La educación en matemáticas es mucho más complicada que lo que esperabas, incluso si esperabas que es más complicada que lo que esperabas. – Edward Griffith Begle
Introducción
Nos acercamos al final de este curso. Para concluir estudiaremos un último tema que tiene que ver con los sistemas autónomos de ecuaciones diferenciales no lineales.
Resolver de forma analítica sistemas de ecuaciones diferenciales no lineales puede ser una tarea sumamente complicada y en algunos casos hasta imposible, es por ello que en muchas ocasiones se opta por resolverlos con métodos numéricos. En este curso no veremos métodos numéricos y mucho menos métodos analíticos para resolver sistemas de ecuaciones diferenciales no lineales debido a que requerimos de más teoría que queda fuera de este primer curso de ecuaciones diferenciales. Pero lo que si podemos hacer es un análisis cualitativo como lo hemos estado haciendo en esta unidad.
Recordemos que el espacio fase de un sistema de ecuaciones diferenciales aporta la suficiente información como para conocer de forma completa el comportamiento de los soluciones a diferentes tiempos, incluso esta información puede ser suficiente para describir el fenómeno que estemos estudiando sin la necesidad de conocer explícitamente las soluciones del sistema.
En esta y las próximas entradas comenzaremos a desarrollar métodos cualitativos que nos permitirán construir el espacio fase de sistemas no lineales y por tanto conocer el comportamiento de sus soluciones a diferentes tiempos y diferentes condiciones iniciales.
En estos momentos ya conocemos métodos analíticos y geométricos que nos permiten entender completamente a los sistemas lineales, es posible combinar estos métodos con algunas otras técnicas cualitativas adicionales para describir a los sistemas no lineales. Comenzaremos desarrollando el método de linealización, el cual nos mostrará cómo es que puede aproximarse un sistema no lineal a un punto de equilibrio por medio de un sistema lineal.
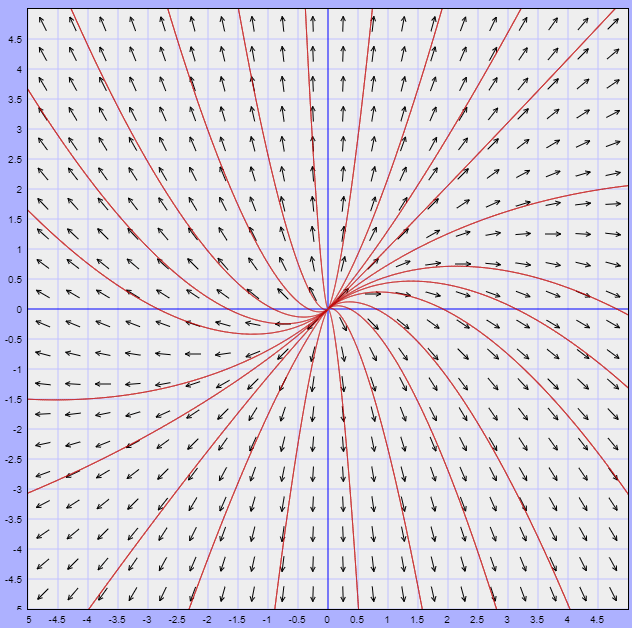
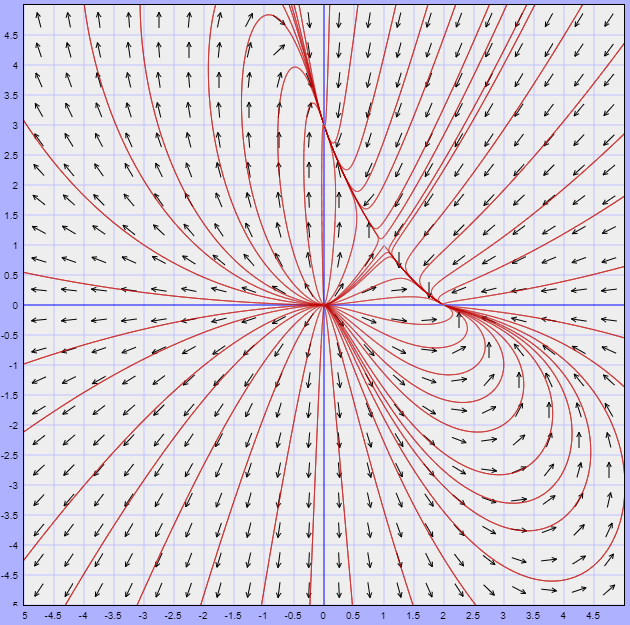
Enseguida podemos darnos cuenta de que el único punto de equilibrio del sistema es el origen. Usando la herramienta que hemos estado utilizando a lo largo de esta unidad podemos visualizar el plano fase del sistema acompañado del campo vectorial asociado.
Plano fase del sistema no lineal (1).
Las trayectorias en general no muestran un comportamiento parecido a alguno de los sistemas estudiados en las entradas anteriores y claro que debe ser así, ya que en este caso se trata de un sistema no lineal. Sin embargo, se puede notar que alrededor del punto de equilibrio, es decir del origen, si hay un comportamiento que nos parece familiar, pues se trata de una espiral que se aleja del origen (parecido a foco inestable).
Lo que haremos será aproximar el sistema (\ref{1}) con un sistema que sea mucho más fácil de analizar. Observemos que el término que hace que el sistema no sea lineal es $x^{2}y$ en la ecuación para $y^{\prime}$. Si $x$ y $y$ son pequeñas (cercanas al punto de equilibrio), entonces el término $x^{2}y$ es aún mucho más pequeño, de manera que para valores pequeños de $x$ y de $y$ es posible aproximar el sistema (\ref{1}) en un sistema lineal en el que no aparece el término $x^{2}y$, dicho sistema es
\begin{align*} x^{\prime} &= y \\ y^{\prime} &= -x + y \label{2} \tag{2} \end{align*}
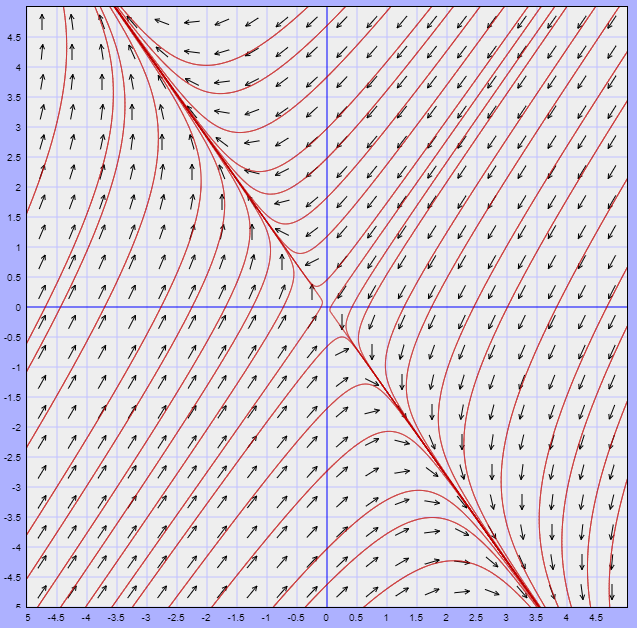
Ambos sistemas deben ser muy similares en una vecindad muy próxima al punto de equilibrio, en este caso en el origen. Veamos el plano fase del sistema lineal (\ref{2}).
Plano fase del sistema lineal (2).
Si observamos con cuidado ambos planos fase vemos que efectivamente son muy similares alrededor del origen, ya que ambos corresponden a espirales que se alejan del origen.
El plano fase del sistema (\ref{2}) corresponde a un sistema con valores propios complejos. Prueba que efectivamente los valores propios son
$$\lambda_{1} = \dfrac{1 + i \sqrt{3}}{2} \hspace{1cm} y \hspace{1cm} \lambda_{2} = \dfrac{1 -i \sqrt{3}}{2}$$
Como son complejos con parte real positiva, sabemos que las soluciones del sistema lineal se mueven en espiral alejándose del origen.
Lo que hemos hecho se conoce como linealización del punto de equilibrio. Cerca del punto de equilibrio aproximamos el sistema no lineal por medio de un sistema lineal apropiado. Para condiciones iniciales cerca del punto de equilibrio las soluciones del sistema no lineal y de la aproximación lineal permanecen cercanas entre sí, por lo menos en algún intervalo.
El sistema no lineal (\ref{1}) se conoce como ecuación de Van der Pol y más adelante volveremos a él.
Veamos cómo sería hacer una linealización de un sistema no polinomial. Consideremos el sistema no lineal
$$\lambda_{1} = \dfrac{-1 + i \sqrt{3}}{2} \hspace{1cm} y \hspace{1cm} \lambda_{2} = \dfrac{-1 -i \sqrt{3}}{2}$$
Como estos números son complejos con parte real negativa, esperamos que el correspondiente punto de equilibrio para el sistema no lineal sea un foco estable.
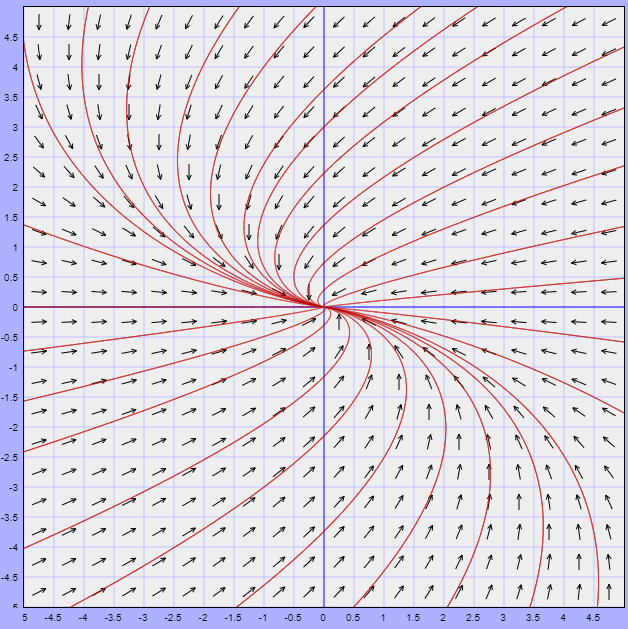
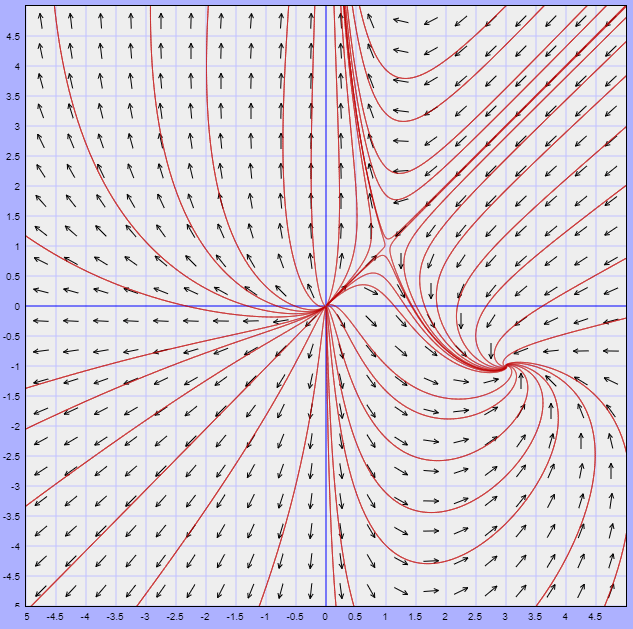
A continuación se muestra el plano fase del sistema no lineal (\ref{3}) y posteriormente el plano fase del sistema linealizado (\ref{6}) y observemos en ambos el comportamiento de las trayectorias alrededor del punto de equilibrio $Y_{0} = (0, 0)$.
Plano fase del sistema (3).Plano fase del sistema (6).
Efectivamente, en ambos planos fase alrededor del origen presentan el mismo comportamiento correspondiente a un foco estable.
El proceso de linealización puede ser directo independientemente del sistema no lineal que tengamos, pero debemos apoyarnos de una herramienta del cálculo diferencial conocida como matriz Jacobiana.
Linealización de los puntos de equilibrio
Consideremos el siguiente sistema autónomo no lineal.
Supongamos que $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio de este sistema (no necesariamente el origen). Queremos entender qué sucede con las soluciones cerca de $Y_{0}$, es decir, linealizar el sistema cerca de $Y_{0}$. Introducimos nuevas variables.
\begin{align*} u &= x -x_{0} \\ v &= y -y_{0} \label{8} \tag{8} \end{align*}
Lo que hacen estas variables es mover el punto de equilibrio al origen. Si $x$ y $y$ están cerca del punto de equilibrio $(x_{0}, y_{0})$, entonces $u$ y $v$ tienden a $0$.
Como los números $x_{0}$ y $y_{0}$ son constantes y además
$$x = u + x_{0} \hspace{1cm} y \hspace{1cm} y = v + y_{0}$$
entonces el sistema (\ref{7}) escrito en términos de $u$ y $v$ es
ya que $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio, esto nos muestra que hemos movido el punto de equilibrio al origen en el plano $UV$.
Lo que haremos a continuación es apoyarnos de algunos resultados del curso de Cálculo III. Necesitamos eliminar los términos de orden superior o no lineales del sistema (\ref{9}). Como esas expresiones pueden incluir funciones exponenciales, logarítmicas y trigonométricas, no siempre es claro cuáles son los términos lineales. En este caso es necesario estudiar a $F_{1}$ y $F_{2}$ con más atención.
De cálculo sabemos que es posible estudiar una función analizando su mejor aproximación lineal, la cual está dada por el plano tangente para funciones de dos variables, es decir
El lado derecho es la ecuación para el plano tangente a la gráfica de $F_{1}$ en $Y_{0} = (x_{0}, y_{0})$. Recordemos que la expresión (\ref{10}) es también la aproximación polinomial de primer grado de Taylor para $F_{1}$.
Podemos, entonces, reescribir el sistema (\ref{9}) como
Donde $\vartheta_{F_{1}}$ y $\vartheta_{F_{2}}$ son los términos que forman la diferencia entre el plano tangente y las funciones $F_{1}$ y $F_{2}$, respectivamente, y son precisamente los términos que deseamos ignorar al formar la aproximación lineal del sistema.
Como $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio, entonces
Por lo tanto, el sistema linealizado en el punto de equilibrio $Y_{0} = (x_{0},y_{0})$ es
$$\begin{pmatrix} u^{\prime} \\ v^{\prime} \end{pmatrix} = \mathbf{J} \begin{pmatrix} u \\ v \end{pmatrix} \label{15} \tag{15}$$
Una observación importante de este proceso es que para crear el sistema linealizado sólo es necesario conocer las derivadas parciales de las componentes $F_{1}$ y $F_{2}$ del campo vectorial en el punto de equilibrio $Y_{0}$, no es necesario hacer el cambio de variable moviendo el punto de equilibrio al origen. Más adelante veremos ejemplos para mostrar este hecho.
Clasificación de los puntos de equilibrio
El método de linealización tiene como propósito usar un sistema lineal para predecir el comportamiento de las soluciones de un sistema no lineal cerca de un punto de equilibrio. En una vecindad de dicho punto, las soluciones de los sistemas lineales y no lineales están cercanas entre sí, por lo menos en un intervalo corto. Para la mayor parte de los sistemas, la información ganada al estudiar la linearización es suficiente para determinar el comportamiento a largo plazo de las soluciones del sistema no lineal cerca del punto de equilibrio.
Esta vez no seremos explícitos, pero es posible hacer una clasificación de los puntos de equilibrio en base a los valores propios de la matriz Jacobiana (\ref{14}).
Si todos los valores propios de $\mathbf{J}$ son números reales negativos o números complejos con parte real negativa, entonces $(u, v) = (0, 0)$ es un nodo atractor para el sistema lineal y todas las soluciones se acercan a $(u, v) = (0, 0)$ cuando $t \rightarrow \infty$. Para el sistema no lineal, las soluciones que empiezan cerca del punto de equilibrio $(x, y) = (x_{0}, y_{0})$ se acercan a éste cuando $t \rightarrow \infty$. Por tanto, decimos que $(x_{0}, y_{0})$ es un nodo atractor. Si los valores propios son complejos, entonces $(x_{0}, y_{0})$ es un foco estable.
De modo similar, si $\mathbf{J}$ sólo tiene valores propios positivos o complejos con parte real positiva, entonces las soluciones con condiciones iniciales cerca del punto de equilibrio $(x_{0}, y_{0})$ tienden a alejarse de éste cuando $t$ crece. Decimos entonces que para un sistema no lineal el punto $(x_{0}, y_{0})$ es una nodo repulsor. Si los valores propios son complejos, entonces $(x_{0}, y_{0})$ es un foco inestable.
Si $\mathbf{J}$ tiene un valor propio positivo y uno negativo, entonces el punto de equilibrio $(x_{0}, y_{0})$ es un punto silla.
Es importante mencionar que esta clasificación de los puntos de equilibrio para los sistemas no lineales no nos dice nada acerca del comportamiento de las soluciones con posiciones iniciales lejanas del punto de equilibrio $(x_{0}, y_{0})$.
Para concluir con esta entrada realicemos algunos ejemplos.
Ejemplo: Linealizar el siguiente sistema no lineal.
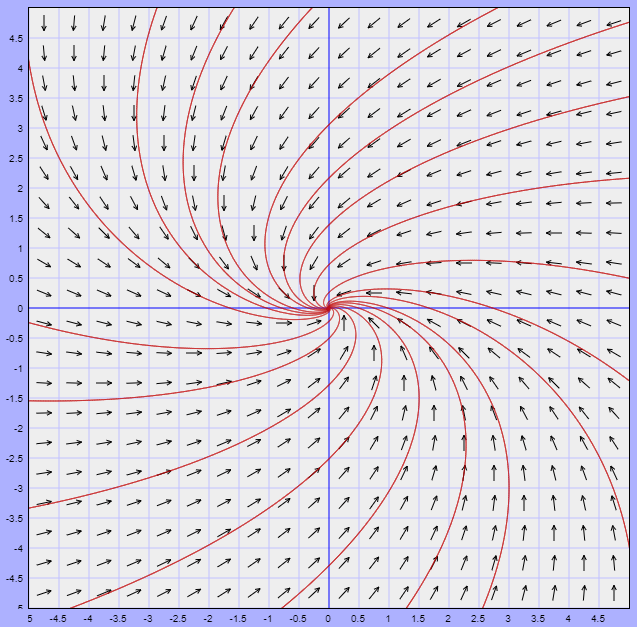
Solución: Comencemos por observar el plano fase de este sistema no lineal.
Plano fase del sistema no lineal.
Nota: Cuando estudiamos las propiedades cualitativas de las trayectorias vimos que es posible esbozar el plano fase de un sistema no lineal si resolvemos la ecuación diferencial
pero no siempre obtendremos una ecuación sencilla de resolver. En general, aún no sabemos cómo esbozar el plano fase de un sistema no lineal, lo ideal es que nosotros lo pudiéramos hacer a mano. Por ahora sólo nos estaremos apoyando de un programa que nos permite obtenerlo, más adelante veremos cómo esbozarlo no sólo cerca de los puntos de equilibrio.
Continuemos con el ejemplo. Del plano fase podemos observar que los puntos de equilibrio son
No es necesario hacer algún tipo de cambio de variable, directamente podemos determinar la matriz Jacobiana para obtener una expresión similar a (\ref{15}). Calculemos las derivadas parciales de $F_{1}(x, y)$ y $F_{2}(x, y)$.
De la primer ecuación obtenemos que $x = 0$ y $2 -x -y = 0$, de este segundo resultado vemos que $x = 2 -y$, sustituyamos ambos valores en la segunda ecuación.
Para $x =0$ obtenemos $3y =0$, de donde $y =0$. Por lo tanto, el origen es un punto de equilibrio.
Para $x =2 -y$, tenemos
$$-(2 -y) + 3y -2(2 -y)y =y^{2} -1 = 0$$
De donde $y_{1} = 1$ y $y_{2} = -1$, sustituyendo ambas raíces en $x = 2 -y$, se tiene
Plano fase del sistema linealizado en el punto de equilibrio $Y_{0} = (3, -1)$.
Por su puesto que se puede aplicar todo lo que sabemos sobre sistemas lineales, podemos determinar los valores propios y los vectores propios para obtener las soluciones generales, podemos también determinar la traza, el determinante, el discriminante y determinar la estabilidad de los puntos de equilibrio, etcétera.
Lo que estamos obteniendo es una descripción local del comportamiento de las soluciones del sistema no lineal alrededor de los puntos de equilibrio.
Una aclaración importante es que los planos fase de los sistemas lineales obtenidos están siendo graficados en el plano $UV$, es por ello que cada uno se encuentra centrado en el origen, en el origen de dicho plano.
$\square$
Finalicemos esta entrada con un ejemplo de especies en competencia.
Un modelo de especies en competencia
El sistema Volterra – Lotka es un conocido sistema para especies en competencia y es de la forma
donde $x$ y $y$ son mayores o igual a cero y los parámetros $A -F$ son siempre positivos.
Consideremos un ejemplo particular del sistema Volterra – Lotka. Sean $x$ y $y$ las poblaciones de dos especies que compiten por recursos, un incremento en cualquier especie tiene un efecto adverso sobre la razón de crecimiento de la otra. El modelo es el siguiente.
Para un valor dado de $x$, si $y$ se incrementa entonces el término $-xy$ ocasiona que $x^{\prime}$ decrezca. De forma similar, para un valor dado de $y$, si $x$ crece entonces $-2xy$ provoca que $y^{\prime}$ disminuya. Un aumento en la población de cualquiera de las especies ocasiona una disminución en la razón de crecimiento de la otra.
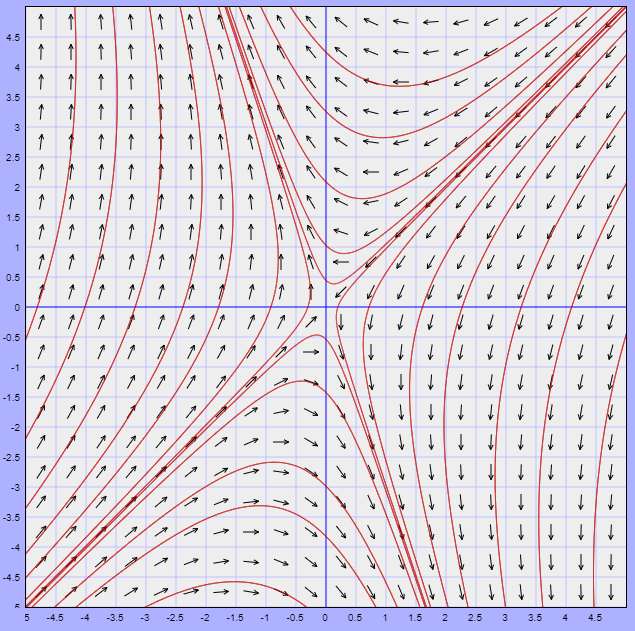
El plano fase del sistema no lineal es
Plano fase del sistema de especies en competencia.
Nota: El plano fase se ilustra para $x$ y $y$ en $\mathbb{R}$, sin embargo, recordemos que el sistema Volterra – Lotka sólo esta definido en el primer cuadrante en el que $x, y \geq 0$, esto debido a que no existen poblaciones negativas. Se puede observar que los cuatro puntos de equilibrio del sistema si pertenecen al primer cuadrante. Sólo consideraremos esta zona.
Consideremos el punto de equilibrio $Y_{3} = (1,1)$, el cual nos indica que es posible para las dos especies coexistir en equilibrio (como las flores y las abejas que se ayudan a sobrevivir y prosperar mutuamente).
Linealizamos el sistema alrededor del punto de equilibrio $Y_{3} = (1, 1)$, para ello evaluemos en la matriz Jacobiana.
como uno es positivo y otro negativo concluimos que el punto de equilibrio es un punto silla. El plano fase del sistema lineal es
Plano fase linealizado alrededor del punto de equilibrio $Y_{3} = (1, 1)$.
Sólo hay dos trayectorias que tienden hacia el punto de equilibrio $Y_{3} = (1, 1)$ cuando $t$ crece, de modo que bajo cualquier perturbación en las condiciones iniciales provocará que una especie domine sobre la otra, sin embargo, este modelo de especies es muy simplificado que no esperamos ver soluciones que conduzcan al punto de equilibrio $(1, 1)$ en la naturaleza.
De tarea moral linealiza el sistema para el resto de puntos de equilibrio.
$\square$
Ahora sabemos como estudiar las soluciones de un sistema no lineal alrededor de sus puntos de equilibrio, esto sólo nos dará información local, de manera que no es suficiente si lo que queremos es describir las soluciones para tiempos grandes. En la siguiente entrada veremos una técnica que nos permite describir las soluciones lejos de los puntos de equilibrio.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Considerar los siguientes tres sistemas no lineales:
$x^{\prime} = 2x + y$ $y^{\prime} = -y + x^{2}$
$x^{\prime} = 2x + y$ $y^{\prime} = y + x^{2}$
$x^{\prime} = 2x + y$ $y^{\prime} = -y -x^{2}$
Los tres sistemas tienen un punto de equilibrio en $(0,0)$. ¿Cuáles dos sistemas tienen planos fase similares cerca de $(0,0)$?. Justificar la respuesta.
Considerar los siguientes tres sistemas no lineales:
Los tres sistemas tienen un punto de equilibrio en $(0,0)$. ¿Cuáles son los dos sistemas que tienen planos fase similares cerca de $(0,0)$?. Justificar la respuesta.
Dado el siguiente sistema no lineal:
$x^{\prime} = -2x + y$ $y^{\prime} = -y + x^{2}$
Encontrar el sistema linealizado para el punto de equilibrio $(0, 0)$.
Clasificar el punto de equilibrio.
Esbozar el plano fase para el sistema no lineal cerca del origen $(0, 0)$.
Repetir los puntos anteriores para el punto de equilibrio $(2, 4)$.
Para el modelo de población de especies en competencia
Linealizar el sistema con respecto al punto de equilibrio $(0, 0)$.
Visualizar el plano fase del sistema linealizado.
¿Los planos fase de ambos sistemas alrededor del punto de equilibrio $(0, 0)$ son similares?. ¿Qué puede estar sucediendo?.
Más adelante…
Una propiedad interesante del campo vectorial
$$F(x, y) = (F_{1}(x, y), F_{2}(x, y))$$
es que en un punto el vector $F$ puede ser totalmente vertical si la componente $F_{1}$ es cero, o bien puede ser totalmente horizontal se la componente $F_{2}$ es cero. Esta propiedad resultará sumamente útil a la hora de estudiar las trayectorias de un sistema no lineal lejos de un punto de equilibrio.
Al conjunto de puntos en los que alguna de las componentes de la función vectorial $F$ es cero se les denomina nulclinas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Las matemáticas son la creación más poderosa y bella del espíritu humano. – Stefan Banach
Introducción
Con esta entrada culminaremos el estudio de los sistemas lineales. En la unidad 3 hicimos un estudio analítico y en esta unidad un estudio cualitativo, aunque reducido a un sistema compuesto por dos ecuaciones, esto con el fin de hacer al mismo tiempo un estudio geométrico en el plano.
A continuación presentamos un breve resumen de los visto en las entradas anteriores.
Clasificación de los planos fase y los puntos de equilibrio
El sistema que estudiamos todo este tiempo fue
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{1} \tag{1} \end{align*}
Este sistema lo podemos escribir en forma matricial como
$$\begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \label{2} \tag{2}$$
Si
$$\mathbf{Y}^{\prime} = \begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix}, \hspace{1cm} \mathbf{Y} = \begin{pmatrix} x \\ y \end{pmatrix} \hspace{1cm} y \hspace{1cm} \mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$$
Vimos que la naturaleza y estabilidad del punto de equilibrio quedó caracterizada por los valores propios de la matriz $\mathbf{A}$ del sistema.
El único punto de equilibrio de los sistemas lineales es el origen $Y_{0} = (0, 0)$, siempre que el determinante de $\mathbf{A}$ sea distinto de cero. En la entrada anterior teníamos que $|\mathbf{A}| = 0$, es por ello que obtuvimos infinitos puntos de equilibrio y es que el hecho de que tengamos valores propios nulos es un caso especial y poco común.
En el caso en el que no hay valores propios nulos, sabemos que en función del comportamiento de las trayectorias en relación con el punto de equilibrio aislado $Y_{0} = (0, 0)$, este punto se denominará: nodo, punto silla, centro, foco, atractor o repulsor. Recordemos cuando se da cada caso.
El punto de equilibrio es un nodo.
Este caso ocurre cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y del mismo signo.
Si $\lambda_{1} < \lambda_{2} < 0$, entonces todas las trayectorias se acercan al origen, de manera que el punto de equilibrio es un nodo atractor y será asintóticamente estable.
Nodo atractor.
Si $\lambda_{1} > \lambda_{2} > 0$, entonces todas las trayectorias se alejan del origen, por tanto, el punto de equilibrio es un nodo repulsor y será inestable.
Nodo repulsor.
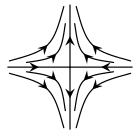
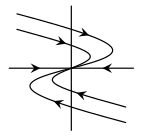
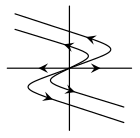
El punto crítico es un punto silla.
Este caso se presenta cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y de distinto signo.
Si $\lambda_{1} < 0$ y $\lambda_{2} > 0$ ocurre que dos trayectorias rectas se acercan al origen y otras dos trayectorias rectas se separan de él, mientras que el resto de trayectorias al pasar cerca del origen inmediatamente se alejan de él. Esto nos permite concluir que todo punto silla es inestable.
Punto silla.
El punto crítico es un centro.
Este caso se presenta cuando los valores propios son imaginarios puros.
Si $\lambda_{1} = i \beta$ y $\lambda_{2} = -i \beta$, entonces las trayectorias serán curvas cerradas que rodean al origen, en general tienen forma de elipses, de modo que ninguna trayectoria tiende a él cuando $t \rightarrow + \infty $ o $t \rightarrow -\infty $, esto hace que el punto de equilibrio sea estable, pero no asintóticamente estable.
Centro.
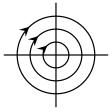
El punto crítico es un foco.
En este caso los valores propios son complejos conjugados y tienen parte real no nula.
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se acercan al origen, es por ello que el punto de equilibrio es asintóticamente estable.
Foco estable.
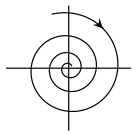
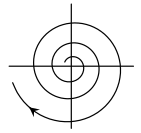
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se separan del origen, es por ello que el punto de equilibrio es inestable.
Foco inestable.
El punto crítico es un atractor o un repulsor.
Este caso se presenta cuando un sistema lineal tiene valores propios reales, del mismo signo, pero además iguales.
Si $\lambda_{1} = \lambda_{2} < 0$, entonces las trayectorias tienden hacia el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un atractor y es asintóticamente estable.
Atractor.
Si $\lambda_{1} = \lambda_{2} > 0$, entonces las trayectorias se alejan el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un repulsor y es inestable.
Repulsor.
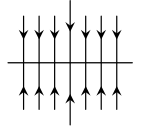
Los puntos críticos son una recta.
En este caso particular hay infinitos puntos de equilibrio, todos sobre una recta y ocurre cuando uno o ambos valores propios son cero.
Líneas de puntos fijos inestables.
Líneas de puntos fijos estables.
Como podemos ver, las características de las trayectorias y de los puntos de equilibrio en el plano fase quedan determinadas por los valores propios de la matriz de coeficientes $\mathbf{A}$. Sin embargo, estas características también se pueden describir en términos de la traza $T$ y del determinante $D$ de la matriz de coeficientes $A$, veamos como es esto.
La traza y el determinante de la matriz de coeficientes
Consideremos la matriz de coeficientes
$$\mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \label{4} \tag{4}$$
Sabemos que la traza de una matriz se define como la suma de los elementos de la diagonal principal de dicha matriz. En nuestro caso, la traza de $\mathbf{A}$ es
$$T = Tr(\mathbf{A}) = a + d \label{5} \tag{5}$$
Por otro lado, el determinante de la matriz $\mathbf{A}$ es
$$D = |\mathbf{A}| = ad -bc \label{6} \tag{6}$$
Consideremos la ecuación característica de $\mathbf{A}$.
$$|\mathbf{A} -\lambda \mathbf{I}| = \begin{vmatrix} a -\lambda & b \\ c & d -\lambda \end{vmatrix} = 0 \label{7} \tag{7}$$
El polinomio característico es
$$P(\lambda) = (a -\lambda)(d -\lambda) -bc = \lambda^{2} -(a + d) \lambda + (ad -bc) \label{8} \tag{8}$$
Si sustituimos las ecuaciones (\ref{5}) y (\ref{6}) en la ecuación característica se tiene
$$\lambda^{2} -T \lambda + D = 0 \label{9} \tag{9}$$
Hemos logrado escribir a los valores propios de $\mathbf{A}$ en términos de la traza y del determinante de la misma matriz $\mathbf{A}$.
De tarea moral, usando (\ref{10}) calcula explícitamente las operaciones $(\lambda_{1} + \lambda_{2})$ y $(\lambda_{1} \cdot \lambda_{2})$ y verifica que se satisfacen las siguientes relaciones importantes.
Es decir, la traza y el determinante de $\mathbf{A}$ también se pueden escribir en términos de los valores propios de $\mathbf{A}$.
El análisis cualitativo que hemos hecho a lo largo de las últimas entradas ha sido en función de los valores propios, recordemos que las posibilidades son
Valores propios reales y distintos:
$\lambda_{1} < \lambda_{2} < 0$.
$\lambda_{1} > \lambda_{2} > 0$.
$\lambda_{1} < 0$ y $\lambda_{2} > 0$.
Valores propios complejos:
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha = 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$.
Valores propios repetidos:
$\lambda_{1} = \lambda_{2} < 0$.
$\lambda_{1} = \lambda_{2} > 0$.
Valores propios nulos
$\lambda_{1} = 0$ y $\lambda_{2} < 0$.
$\lambda_{1} = 0$ y $\lambda_{2} > 0$.
$\lambda_{1} = \lambda_{2} = 0$.
Sin embargo, ahora podemos analizar cada caso pero en función de los valores de la traza $T$ y el determinante $D$ de $\mathbf{A}$, ya que inmediatamente podemos notar de (\ref{10}) que los valores propios de $\mathbf{A}$ son complejos si $T^{2} -4D < 0$, son repetidos si $T^{2} -4D = 0$, y son reales y distintos si $T^{2} -4D > 0$.
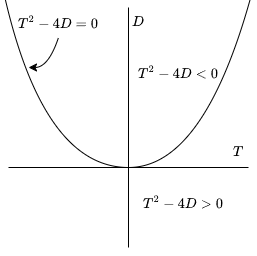
El plano Traza – Determinante
Comenzaremos a hacer un nuevo bosquejo para los sistemas lineales examinando el conocido plano traza – determinante. El eje $T$ corresponderá a la línea horizontal y representa a la traza, mientras que el eje $D$ corresponderá a la vertical y representa al determinante. En este plano la curva
$$T^{2} -4D = 0$$
o su equivalente,
$$D(T) = \dfrac{T^{2}}{4} \label{13} \tag{13}$$
es una parábola con concavidad hacia arriba. Arriba de ésta encontramos $T^{2} -4D < 0$, y abajo de ella $T^{2} -4D > 0$, tal como se muestra en la siguiente figura.
Plano traza – determinante.
Para usar este plano, calculamos primero $T$ y $D$ para una matriz $\mathbf{A}$ dada y luego localizamos el punto $(T, D)$ en el plano. De forma inmediata podremos visualizar si los valores propios son reales, repetidos o complejos, dependiendo de la posición de $(T, D)$ respecto a la parábola.
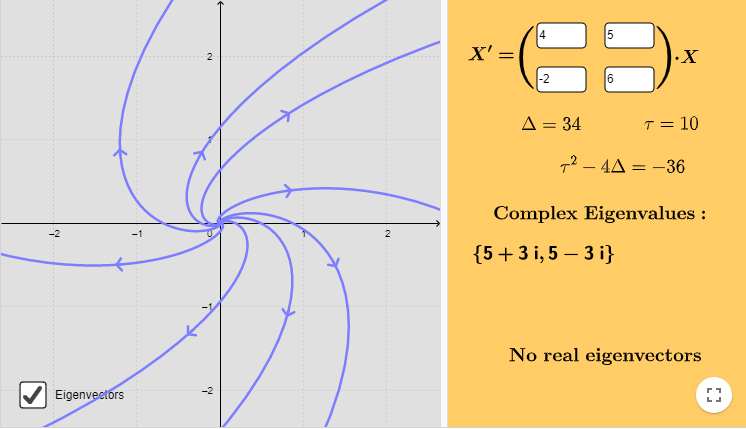
Ejemplo: Determinar el tipo de valores propios que tiene el siguiente sistema lineal.
Como $T^{2} -4D < 0$, entonces inmediatamente concluimos que los valores propios son complejos conjugados. Ahora bien, aún no sabemos si se trata de un centro o algún tipo de espiral, pero por el momento no nos preocupemos por ello.
Sólo con el fin de conocer el tipo de soluciones que tiene el sistema, su plano fase es el siguiente.
Plano fase del sistema.
Las trayectorias del sistema corresponden a espirales y el punto de equilibrio es un foco inestable. Observa que la figura ya nos da los valores de la traza, el determinante y el discriminante, aunque con una notación distinta.
Ahora puedes regresar a visualizar los planos fase de todos los ejemplos que hicimos en las 4 entradas anteriores y poner más atención en los valores de la traza y el determinante.
$\square$
Por su puesto que podemos hacer mucho más en el plano traza – determinante. Por ejemplo, desearíamos no sólo saber si los valores propios de $\mathbf{A}$ son complejos, repetidos o reales, sino que también conocer si tienen parte real nula o distinta de cero o si son reales positivos, negativos o de distinto signo, etcétera.
A continuación haremos un análisis más detallado sobre las raíces (\ref{10}) y veremos que tipo de información nos proporciona sobre los sistemas lineales.
Recordemos que los valores propios de $\mathbf{A}$, en términos de la traza y el determinante de $\mathbf{A}$ son
Atendiendo a los diferentes valores de $T$ y $D$, se tiene:
Si $T^{2} -4D < 0$, entonces los valores propios $\lambda_{1}$ y $\lambda_{2}$ son complejos conjugados con parte real igual a $T /2$. Se tienen los siguientes casos:
Los valores propios son imaginarios puros si $T = 0$ (centro y estabilidad).
Los valores propios tienen parte real negativa cuando $T < 0$ (foco y estabilidad asintótica).
Los valores propios tienen parte real positiva cuando $T > 0$ (foco e inestabilidad).
Si consideramos el plano traza – determinante y denotamos por $O$ al origen podremos asegurar que por encima de la parábola $T^{2} -4D = 0$ se tiene:
En el eje $OD$ se presentan los centros y hay estabilidad.
A la izquierda del eje $OD$ se presentan los focos y hay estabilidad asintótica.
A la derecha del eje $OD$ también se presentan focos, pero hay inestabilidad.
Si $D < 0$, entonces se tiene $T^{2} -4D > T^{2}$. En este caso los valores propios son reales y de distinto signo, lo que significa que se presentarán puntos silla e inestabilidad. En el plano traza – determinante los encontraremos por debajo del eje $T$.
Si $D > 0$ y $T^{2} -4D \geq 0$, entonces los valores propios son reales y tienen el mismo signo que $T$. Los casos posibles son:
Si $T < 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y negativos (atractor y estabilidad asintótica).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y negativos (nodo atractor y estabilidad asintótica).
Si $T > 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y positivos (repulsor e inestabilidad).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y positivos (nodo repulsor e inestabilidad).
Si $D = 0$, entonces uno o ambos valores propios son cero. Los siguientes casos se obtienen directamente de (\ref{11}) y (\ref{12}).
Si $T = 0$ (origen), entonces ambos valores propios son cero (recta de puntos de equilibrio y trayectorias paralelas a dicha recta).
Si $T > 0$, entonces un valor propio es cero y el otro es positivo (recta de puntos de equilibrio inestables y trayectorias rectas que se alejan de la recta de puntos de equilibrio).
Si $T < 0$, entonces un valor propio es cero y el otro es negativo (recta de puntos de equilibrio asintóticamente estables y trayectorias rectas que tienden a la recta de puntos de equilibrio).
¡Todo lo que hemos aprendido sobre sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales de primer orden con coeficientes constantes, incluyendo todas las características anteriores, se resume en el siguiente diagrama!.
Plano traza – determinante con todas las posibilidades de planos fase.
Veamos un ejemplo.
Ejemplo: Caracterizar el siguiente sistema lineal.
Como $T > 0$, $D > 0$ y $T^{2} -4D = 0$, vamos al punto 3 y deducimos que el sistema lineal tiene valores propios iguales y positivos. De acuerdo a las ecuaciones (\ref{11}) y (\ref{12}) se tiene el siguiente sistema.
\begin{align*} T &= 2 = \lambda_{1} + \lambda_{2} \\ D &= 1 = \lambda_{1}\lambda_{2} \end{align*}
De la primer ecuación obtenemos $\lambda_{1} = 2 -\lambda_{2}$, sustituyendo en la segunda ecuación se tiene
La única raíz es $\lambda_{2} = 1$, sustituyendo en cualquier ecuación del sistema obtenemos que $\lambda_{1} = 1$. Por lo tanto, el único valor propio de la matriz $\mathbf{A}$ es $\lambda = 1$ (iguales y positivos, tal como lo habíamos deducido).
Si vamos al plano traza – determinante, como $T > 0$ y $D > 0$, entonces estamos en el primer cuadrante, pero además $T^{2} -4D = 0$, así que estamos situados sobre la parábola del primer cuadrante, exactamente en el punto $(T, D) = (2, 1)$, esto nos permite concluir que el plano fase del sistema corresponde a repulsor.
El plano fase del sistema es el siguiente.
Plano fase del sistema.
Efectivamente se trata de un repulsor.
$\square$
Debido a que cada punto del plano traza – determinante representa un plano fase distinto, el plano traza – determinante es un ejemplo de lo que se conoce como plano paramétrico.
El plano paramétrico
El plano traza – determinante es un ejemplo de un plano paramétrico. Los elementos de la matriz $\mathbf{A}$ son parámetros que se pueden ajustar, cuando esos elementos cambian, la traza y el determinante de la matriz también se modifican y el punto $(T, D)$ se mueve en el plano paramétrico. Cuando este punto entra en las diversas regiones del plano traza – determinante, debemos imaginar que los retratos fase asociados también experimentan transformaciones.
El plano traza – determinante es un esquema de clasificación del comportamiento de todas las posibles soluciones de sistemas lineales.
En este enlace se tiene acceso a una herramienta visual del plano paramétrico. En él se puede mover el punto $(T, D)$ a lo largo de las diferentes regiones del plano traza – determinante a la vez que visualizamos el tipo de planos fase que se generan. ¡Pruébalo y diviértete!
Con esto concluimos el estudio de los sistemas lineales. Cabe mencionar que el plano traza – determinante no da una información completa sobre el sistema lineal tratado.
Por ejemplo, a lo largo de la parábola $T^{2} -4D = 0$ tenemos valores propios repetidos, pero no podemos determinar si tenemos uno o varios vectores propios linealmente independientes. para saberlo es preciso calcularlos.
De modo similar, no podemos determinar la dirección en que las soluciones se mueven alrededor del origen si $T^{2}-4D < 0$. Por ejemplo, las dos matrices
tienen traza $T = 0$ y determinante $D = 1$, pero las soluciones del sistema $\mathbf{Y}^{\prime} = \mathbf{AY}$ se mueven alrededor del origen en el sentido de las manecillas del reloj, mientras que las soluciones de $\mathbf{Y}^{\prime} = \mathbf{BY}$ viajan en el sentido opuesto.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Hacer un análisis cualitativo de los siguientes sistemas lineales apoyándose de la traza y el determinante de la matriz de coeficientes $\mathbf{A}$, así como del plano traza – determinante. Es decir, de acuerdo al valor de la traza $T$, el determinante $D$ y el discriminante $T^{2} -4D$, determinar que tipo de valores propios tiene el sistema, así como el tipo de plano fase y estabilidad del punto de equilibrio.
Estamos cerca de concluir el curso. En las próximas entradas estudiaremos de manera cualitativa a los sistemas no lineales compuestos por dos ecuaciones diferenciales de primer orden.
En particular, en la siguiente entrada veremos que alrededor de un punto de equilibrio de un sistema no lineal las trayectorias son muy parecidas a las de un sistema lineal lo que nos permitirá observar el comportamiento que tienen las soluciones del sistema no lineal, al menos cerca de un punto de equilibrio.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»