En esta entrada conoceremos una nueva operación que se puede aplicar a matrices: la traza. Esta operación a primera vista parece bastante sencilla, pero no por eso es menos importante; en futuros cursos conocerás cómo se relaciona estrechamente con otros conceptos matemáticos y sus aplicaciones.
Traza
Definimos la traza de una matriz cuadrada como la suma de los elementos de su diagonal. Es importante destacar que únicament ele aplicaremos la operación de traza a matrices cuadradas pues más adelante las propiedades que nos interesarán requieren de esta condición.
La traza cumple un par de propiedades importantes con respecto a otras operaciones que definimos anteriormente. Para la prueba de estas propiedades consideraremos matrices de tamaño $2 \times 2$, pero fácilmente podrás probarlo para cualquier otro tamaño de matrices cuadradas.
Problema. ¿Para qué matrices de $2 \times 2$ se tiene que $\operatorname{tr}(A^2) = (\operatorname{tr}(A))^2$?
Solución. Consideremos la matriz de $2 \times 2$ \[ \begin{pmatrix} a & b \\ c & d \end{pmatrix}. \]
Calculamos \[ \operatorname{tr}(A^2) = \operatorname{tr} \begin{pmatrix} a^2 + bc & ab + bd \\ ac + cd & bc + d^2 \end{pmatrix} = (a^2+bc)+(bc+d^2) = a^2 + 2bc + d^2 \] y \[ (\operatorname{tr}(A))^2 = (a + d)^2 = a^2 + 2ad + d^2. \]
Entonces, notamos que \[ \operatorname{tr}(A^2) = (\operatorname{tr}(A))^2 \] si y sólo si \[ a^2 + 2bc + d^2 = a^2 + 2ad + d^2, \] lo cual se cumple si y sólo si \[ bc = ad. \]
Entonces, las matrices de $2\times 2$ que cumplen que $\operatorname{tr}(A^2) = (\operatorname{tr}(A))^2$ son aquellas de la forma $\begin{pmatrix} a & b \\ c & d \end{pmatrix}$ tales que $bc = ad$. ¿Podrías dar un ejemplo de una matriz que cumpla esto?
$\square$
Nota. El hecho de que la matriz $A$ anterior cumpla que $bc = ad$ equivale a que $ac – bd = 0$, y esto equivale, como verás en la siguiente entrada, a que “el determinante de $A$ sea cero”.
Más adelante…
En esta entrada aprendimos la definición de traza y vimos algunas de sus propiedades.
Además, en el problema 2, mencionamos un concepto que hasta ahora no hemos visto. En la siguiente entrada conoceremos una de las operaciones más importantes que se pueden aplicar a matrices cuadradas: el determinante.
Demuestra que $\text{tr}(AB)=\text{tr}(BA)$ para matrices $A$ y $B$ de $3\times 3$. Intenta también hacerlo para matrices de $n\times n$.
Determina si el siguiente enunciado es verdadero o falso. Si $A$ y $B$ son matrices de $2\times 2$ tales que $\text{tr}(A)=\text{tr}(B)$ y $\text{tr}(A^2)=\text{tr}(B^2)$, entonces $A=B$.
¿Será cierto que la traza es multiplicativa? Es decir, ¿para cualesquiera matrices $A$ y $B$ se cumple que $\text{tr}(AB)=\text{tr}(A)\text{tr}(B)$?
Sea $A$ una matriz de $2\times 2$. Demuestra que $\text{tr}(AA^T)$ siempre es un número real mayor o igual que cero. ¿Es cierto esto mismo si la matriz es de $3\times 3$? ¿Es cierto siempre que $\text{tr}(A^2)$ es un número mayor o igual a cero?
Hemos estudiado varias clases importantes de matrices y transformaciones lineales: diagonales, triangulares superiores, simétricas, ortogonales, normales, etc. Es momento de aprender sobre otro tipo fundamental de matrices y transformaciones lineales: las transformaciones nilpotentes. Nos hemos encontrado con estas matrices ocasionalmente a lo largo del primer curso de álgebra lineal y de éste. Ahora las trataremos de manera más sistemática.
Matrices y transformaciones nilpotentes
En la última unidad estuvimos trabajando únicamente en $\mathbb{R}$ o en $\mathbb{C}$. Los resultados que presentaremos a continuación son válidos para espacios vectoriales sobre cualquier campo $F$.
Definición. Sea $A$ una matriz en $M_n(F)$. Diremos que $A$ es nilpotente si $A^m = O_n$ para algún entero positivo $m$. Al menor entero positivo $m$ para el cual suceda esto le llamamos el índice de $A$.
Ejemplo 1. La matriz $A=\begin{pmatrix} 3 & -9\\ 1 & -3\end{pmatrix}$ es nilpotente. En efecto, tenemos que $A^2=\begin{pmatrix} 0 & 0 \\ 0 & 0 \end{pmatrix}$. Como $A^1\neq 0$, entonces el índice de $A$ es igual a dos.
$\triangle$
Tenemos una definición correspondiente para transformaciones lineales.
Definición. Sea $V$ un espacio vectorial sobre un campo $F$ y sea $T: V \to V$ una transformación lineal. Diremos que que $T$ es nilpotente si $T^m$ es la transformación lineal cero para algún entero positivo $m$. Al menor entero positivo $m$ para el cual suceda esto le llamamos el índice de $T$.
Recuerda que por definición $T^m$ es la transformación $T$ compuesta consigo misma $m$ veces.
Ejemplo 2. Si estamos trabajando en el espacio $V=\mathbb{R}_n[x]$ de polinomios reales de grado a lo más $n$, entonces la transformación derivada $D:V\to V$ para la cual $D(p)=p’$ es una transformación lineal nilpotente. En efecto, tras aplicarla $n+1$ veces a cualquier polinomio de grado a lo más $n$ obtenemos al polinomio $0$. Su índice es exactamente $n+1$ pues derivar $n$ veces no anula al polinomio $x^n$ de $V$.
Si estuviéramos trabajando en el espacio vectorial $\mathbb{R}[x]$ de todos los polinomios reales, entonces la transformación derivada ya no sería nilpotente. En efecto, para cualquier $m$ siempre existe un polinomio tal que al derivarlo $m$ veces no se anula.
$\triangle$
Bloques de Jordan de eigenvalor cero
Hay una familia importante de matrices nilpotentes.
Definición. Sea $F$ un campo. El bloque de Jordan de eigenvalor $0$ y tamaño $k$ es la matriz $J_{0,k}$ en $M_k(F)$ cuyas entradas son todas cero, a excepción de las que están inmediatamente arriba de la diagonal superior, las cuales son unos. En símbolos, $J_{0,k}=[a_{ij}]$ con $$a_{ij}=\begin{cases} 1 & \text{si $j=i+1$}\\ 0 & \text{en otro caso.} \end{cases}$$
También podemos expresarlo de la siguiente manera:
De esta manera, hay una potencia de $ J_{0,4}$ que se hace igual a cero. Como la mínima potencia es $4$, entonces $ J_{0,4} $ es nilpotente de índice $4$. Observa cómo la diagonal de unos «se va recorriendo hacia arriba a la derecha».
$\triangle$
Todos los bloques de Jordan son nilpotentes
El siguiente resultado generaliza el ejemplo anterior y nos da una mejor demostración, interpretando a la matriz como transformación lineal.
Teorema. La matriz $J_{0,k}$ es nilpotente de índice $k$.
En otras palabras, la matriz $J_{0,k}$ «recorre» las entradas del vector hacia arriba «empujando» con ceros desde abajo. Al hacer esto $k$ veces, claramente llegamos al vector $0$, así, $J_{0,k}^k$ está asociada a la transformación lineal cero y por lo tanto es la matriz $O_k$. Y $J_{0,k}^{k-1}$ no es la matriz cero pues al aplicarla en $e_k$, el $k$-ésimo vector de la base canónica de $F^k$ tenemos por las mismas ideas de arriba que $J_{0,k}^{k-1}e_n=e_1$.
$\square$
Una caracterización de matrices y transformaciones nilpotentes
El siguiente resultado nos da algunas equivalencias para que una transformación sea nilpotente.
Proposición. Sea $A\in M_n(F)$ una matriz. Todo lo siguiente es equivalente:
$A$ es nilpotente.
El polinomio mínimo de $A$ es de la forma $\mu_A(X)=X^k$.
El polinomio característico de $A$ es $\chi_A(X)=X^n$.
Demostración. $1)\Rightarrow 2).$ Si $A$ es nilpotente, entonces hay un entero $m$ tal que $A^m=O_n$. Entonces, el polinomio $p(X)=X^m$ anula a la matriz $A$. Pero el polinomio mínimo divide a cualquier polinomio que anule a $A$, entonces $\mu_A(X)|X^m$, de donde $\mu_A(X)$ debe ser también de la forma $X^k$. De hecho, no puede suceder que $k<m$ pues en dicho caso como el polinomio mínimo anula a la matriz, tendríamos que $A^k=O_n$, pero esto es imposible pues $m$ es el menor entero tal que $A^m=O_n$. Así, en este caso $k$ es justo el índice de $A$.
$2) \Rightarrow 3).$ Supongamos que el polinomio mínimo de $A$ es de la forma $\mu_A(X)=X^k$. Como el polinomio mínimo anula a la matriz tenemos que $A^k=O_n$. Tomemos un escalar $\lambda$ en $F$ fijo. Tenemos que:
Del lado izquierdo tenemos $\det(\lambda^k I_n)=\lambda^{nk}$. Del lado derecho tenemos $\chi_A(\lambda)$ multiplicado por otra expresión polinomial en $\lambda$, digamos $P(\lambda)$. Como esto se vale para todo escalar $\lambda$, se vale polinomialmente que $X^{nk}=\chi_A(X)P(X)$. Así, $\chi_A(X)|X^{nk}$ y como el polinomio característico es de grado exactamente $n$, obtenemos que $\chi_A(X)=X^n$.
$3) \Rightarrow 1).$ Si el polinomio característico de $A$ es $\chi_A(X)=X^n$, entonces por el teorema de Cayley-Hamilton tenemos que $A^n=O_n$, de donde $A$ es nilpotente.
$\square$
Como consecuencia del teorema anterior, obtenemos los siguientes resultados.
Corolario. Si $A$ es una matriz nilpotente en $M_n(F)$, entonces $A^n=O_n$ y por lo tanto el índice de $A$ es menor o igual a $n$. Análogamente, si $T:V\to V$ es nilpotente y $\dim(V)=n$, entonces el índice de $T$ es menor o igual a $n$.
Corolario. Si $A$ es una matriz nilpotente en $M_n(F)$, entonces su traza, su determinante y cualquier eigenvalor son todos iguales a cero.
Más adelante…
En esta entrada definimos a las matrices y transformaciones nilpotentes. También enunciamos algunas de sus propiedades. En la siguiente entrada enunciaremos nuestra primer versión del teorema de Jordan, en donde nos enfocaremos únicamente en lo que nos dice para las matrices nilpotentes. Esto servirá más adelante como uno de los peldaños que usaremos para demostrar el teorema de Jordan en general.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Encuentra una matriz nilpotente de índice $2$ en $M_7(\mathbb{R})$. En general, para cualquier entero positivo $n$ y cualquier entero $k$ con $1\leq k \leq n$, da una forma de construir una matriz nilpotente de índice $n$ en $M_n(\mathbb{R})$.
Encuentra una matriz con determinante cero y que no sea una matriz nilpotente. Encuentra una matriz con traza cero y que no sea una matriz nilpotente.
Sea $V$ un espacio vectorial de dimensión finita $n$. Demuestra que las siguientes afirmaciones son equivalentes:
Una transformación $T:V\to V$ es nilpotente de índice $k$.
Alguna forma matricial de $T$ es nilpotente de índice $k$.
Todas las formas matriciales de $T$ son nilpotentes de índice $k$.
$T^n$ es la transformación lineal $0$.
Demuestra los dos corolarios al final de la entrada. Como sugerencia para el segundo, recuerda que la traza, determinante y los eigenvalores de una matriz están muy relacionados con su polinomio característico.
Prueba que la única matriz nilpotente diagonalizable en $M_n(F)$ es $O_n$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
Las matemáticas son la creación más poderosa y bella del espíritu humano. – Stefan Banach
Introducción
Con esta entrada culminaremos el estudio de los sistemas lineales. En la unidad 3 hicimos un estudio analítico y en esta unidad un estudio cualitativo, aunque reducido a un sistema compuesto por dos ecuaciones, esto con el fin de hacer al mismo tiempo un estudio geométrico en el plano.
A continuación presentamos un breve resumen de los visto en las entradas anteriores.
Clasificación de los planos fase y los puntos de equilibrio
El sistema que estudiamos todo este tiempo fue
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{1} \tag{1} \end{align*}
Este sistema lo podemos escribir en forma matricial como
$$\begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \label{2} \tag{2}$$
Si
$$\mathbf{Y}^{\prime} = \begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix}, \hspace{1cm} \mathbf{Y} = \begin{pmatrix} x \\ y \end{pmatrix} \hspace{1cm} y \hspace{1cm} \mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$$
Vimos que la naturaleza y estabilidad del punto de equilibrio quedó caracterizada por los valores propios de la matriz $\mathbf{A}$ del sistema.
El único punto de equilibrio de los sistemas lineales es el origen $Y_{0} = (0, 0)$, siempre que el determinante de $\mathbf{A}$ sea distinto de cero. En la entrada anterior teníamos que $|\mathbf{A}| = 0$, es por ello que obtuvimos infinitos puntos de equilibrio y es que el hecho de que tengamos valores propios nulos es un caso especial y poco común.
En el caso en el que no hay valores propios nulos, sabemos que en función del comportamiento de las trayectorias en relación con el punto de equilibrio aislado $Y_{0} = (0, 0)$, este punto se denominará: nodo, punto silla, centro, foco, atractor o repulsor. Recordemos cuando se da cada caso.
El punto de equilibrio es un nodo.
Este caso ocurre cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y del mismo signo.
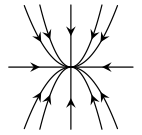
Si $\lambda_{1} < \lambda_{2} < 0$, entonces todas las trayectorias se acercan al origen, de manera que el punto de equilibrio es un nodo atractor y será asintóticamente estable.
Nodo atractor.
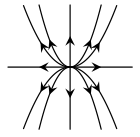
Si $\lambda_{1} > \lambda_{2} > 0$, entonces todas las trayectorias se alejan del origen, por tanto, el punto de equilibrio es un nodo repulsor y será inestable.
Nodo repulsor.
El punto crítico es un punto silla.
Este caso se presenta cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y de distinto signo.
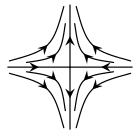
Si $\lambda_{1} < 0$ y $\lambda_{2} > 0$ ocurre que dos trayectorias rectas se acercan al origen y otras dos trayectorias rectas se separan de él, mientras que el resto de trayectorias al pasar cerca del origen inmediatamente se alejan de él. Esto nos permite concluir que todo punto silla es inestable.
Punto silla.
El punto crítico es un centro.
Este caso se presenta cuando los valores propios son imaginarios puros.
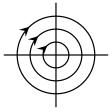
Si $\lambda_{1} = i \beta$ y $\lambda_{2} = -i \beta$, entonces las trayectorias serán curvas cerradas que rodean al origen, en general tienen forma de elipses, de modo que ninguna trayectoria tiende a él cuando $t \rightarrow + \infty $ o $t \rightarrow -\infty $, esto hace que el punto de equilibrio sea estable, pero no asintóticamente estable.
Centro.
El punto crítico es un foco.
En este caso los valores propios son complejos conjugados y tienen parte real no nula.
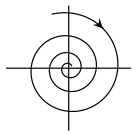
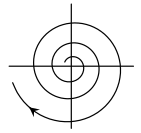
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se acercan al origen, es por ello que el punto de equilibrio es asintóticamente estable.
Foco estable.
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se separan del origen, es por ello que el punto de equilibrio es inestable.
Foco inestable.
El punto crítico es un atractor o un repulsor.
Este caso se presenta cuando un sistema lineal tiene valores propios reales, del mismo signo, pero además iguales.
Si $\lambda_{1} = \lambda_{2} < 0$, entonces las trayectorias tienden hacia el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un atractor y es asintóticamente estable.
Atractor.
Si $\lambda_{1} = \lambda_{2} > 0$, entonces las trayectorias se alejan el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un repulsor y es inestable.
Repulsor.
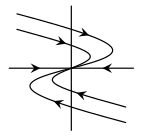
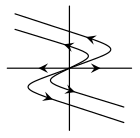
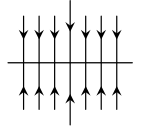
Los puntos críticos son una recta.
En este caso particular hay infinitos puntos de equilibrio, todos sobre una recta y ocurre cuando uno o ambos valores propios son cero.
Líneas de puntos fijos inestables.
Líneas de puntos fijos estables.
Como podemos ver, las características de las trayectorias y de los puntos de equilibrio en el plano fase quedan determinadas por los valores propios de la matriz de coeficientes $\mathbf{A}$. Sin embargo, estas características también se pueden describir en términos de la traza $T$ y del determinante $D$ de la matriz de coeficientes $A$, veamos como es esto.
La traza y el determinante de la matriz de coeficientes
Consideremos la matriz de coeficientes
$$\mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \label{4} \tag{4}$$
Sabemos que la traza de una matriz se define como la suma de los elementos de la diagonal principal de dicha matriz. En nuestro caso, la traza de $\mathbf{A}$ es
$$T = Tr(\mathbf{A}) = a + d \label{5} \tag{5}$$
Por otro lado, el determinante de la matriz $\mathbf{A}$ es
$$D = |\mathbf{A}| = ad -bc \label{6} \tag{6}$$
Consideremos la ecuación característica de $\mathbf{A}$.
$$|\mathbf{A} -\lambda \mathbf{I}| = \begin{vmatrix} a -\lambda & b \\ c & d -\lambda \end{vmatrix} = 0 \label{7} \tag{7}$$
El polinomio característico es
$$P(\lambda) = (a -\lambda)(d -\lambda) -bc = \lambda^{2} -(a + d) \lambda + (ad -bc) \label{8} \tag{8}$$
Si sustituimos las ecuaciones (\ref{5}) y (\ref{6}) en la ecuación característica se tiene
$$\lambda^{2} -T \lambda + D = 0 \label{9} \tag{9}$$
Hemos logrado escribir a los valores propios de $\mathbf{A}$ en términos de la traza y del determinante de la misma matriz $\mathbf{A}$.
De tarea moral, usando (\ref{10}) calcula explícitamente las operaciones $(\lambda_{1} + \lambda_{2})$ y $(\lambda_{1} \cdot \lambda_{2})$ y verifica que se satisfacen las siguientes relaciones importantes.
Es decir, la traza y el determinante de $\mathbf{A}$ también se pueden escribir en términos de los valores propios de $\mathbf{A}$.
El análisis cualitativo que hemos hecho a lo largo de las últimas entradas ha sido en función de los valores propios, recordemos que las posibilidades son
Valores propios reales y distintos:
$\lambda_{1} < \lambda_{2} < 0$.
$\lambda_{1} > \lambda_{2} > 0$.
$\lambda_{1} < 0$ y $\lambda_{2} > 0$.
Valores propios complejos:
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha = 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$.
Valores propios repetidos:
$\lambda_{1} = \lambda_{2} < 0$.
$\lambda_{1} = \lambda_{2} > 0$.
Valores propios nulos
$\lambda_{1} = 0$ y $\lambda_{2} < 0$.
$\lambda_{1} = 0$ y $\lambda_{2} > 0$.
$\lambda_{1} = \lambda_{2} = 0$.
Sin embargo, ahora podemos analizar cada caso pero en función de los valores de la traza $T$ y el determinante $D$ de $\mathbf{A}$, ya que inmediatamente podemos notar de (\ref{10}) que los valores propios de $\mathbf{A}$ son complejos si $T^{2} -4D < 0$, son repetidos si $T^{2} -4D = 0$, y son reales y distintos si $T^{2} -4D > 0$.
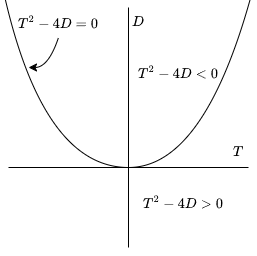
El plano Traza – Determinante
Comenzaremos a hacer un nuevo bosquejo para los sistemas lineales examinando el conocido plano traza – determinante. El eje $T$ corresponderá a la línea horizontal y representa a la traza, mientras que el eje $D$ corresponderá a la vertical y representa al determinante. En este plano la curva
$$T^{2} -4D = 0$$
o su equivalente,
$$D(T) = \dfrac{T^{2}}{4} \label{13} \tag{13}$$
es una parábola con concavidad hacia arriba. Arriba de ésta encontramos $T^{2} -4D < 0$, y abajo de ella $T^{2} -4D > 0$, tal como se muestra en la siguiente figura.
Plano traza – determinante.
Para usar este plano, calculamos primero $T$ y $D$ para una matriz $\mathbf{A}$ dada y luego localizamos el punto $(T, D)$ en el plano. De forma inmediata podremos visualizar si los valores propios son reales, repetidos o complejos, dependiendo de la posición de $(T, D)$ respecto a la parábola.
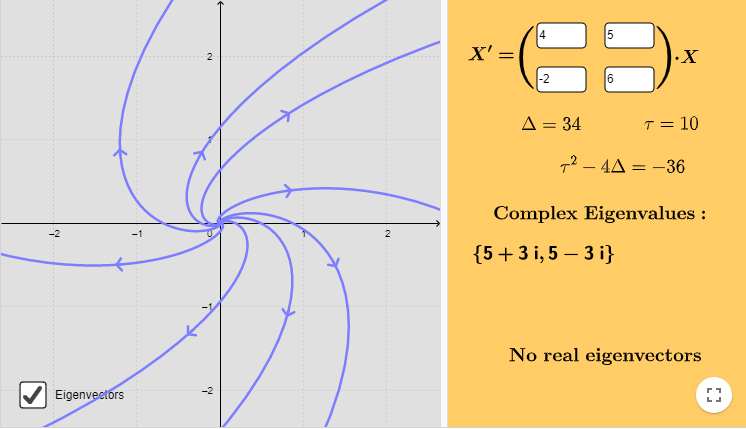
Ejemplo: Determinar el tipo de valores propios que tiene el siguiente sistema lineal.
Como $T^{2} -4D < 0$, entonces inmediatamente concluimos que los valores propios son complejos conjugados. Ahora bien, aún no sabemos si se trata de un centro o algún tipo de espiral, pero por el momento no nos preocupemos por ello.
Sólo con el fin de conocer el tipo de soluciones que tiene el sistema, su plano fase es el siguiente.
Plano fase del sistema.
Las trayectorias del sistema corresponden a espirales y el punto de equilibrio es un foco inestable. Observa que la figura ya nos da los valores de la traza, el determinante y el discriminante, aunque con una notación distinta.
Ahora puedes regresar a visualizar los planos fase de todos los ejemplos que hicimos en las 4 entradas anteriores y poner más atención en los valores de la traza y el determinante.
$\square$
Por su puesto que podemos hacer mucho más en el plano traza – determinante. Por ejemplo, desearíamos no sólo saber si los valores propios de $\mathbf{A}$ son complejos, repetidos o reales, sino que también conocer si tienen parte real nula o distinta de cero o si son reales positivos, negativos o de distinto signo, etcétera.
A continuación haremos un análisis más detallado sobre las raíces (\ref{10}) y veremos que tipo de información nos proporciona sobre los sistemas lineales.
Recordemos que los valores propios de $\mathbf{A}$, en términos de la traza y el determinante de $\mathbf{A}$ son
Atendiendo a los diferentes valores de $T$ y $D$, se tiene:
Si $T^{2} -4D < 0$, entonces los valores propios $\lambda_{1}$ y $\lambda_{2}$ son complejos conjugados con parte real igual a $T /2$. Se tienen los siguientes casos:
Los valores propios son imaginarios puros si $T = 0$ (centro y estabilidad).
Los valores propios tienen parte real negativa cuando $T < 0$ (foco y estabilidad asintótica).
Los valores propios tienen parte real positiva cuando $T > 0$ (foco e inestabilidad).
Si consideramos el plano traza – determinante y denotamos por $O$ al origen podremos asegurar que por encima de la parábola $T^{2} -4D = 0$ se tiene:
En el eje $OD$ se presentan los centros y hay estabilidad.
A la izquierda del eje $OD$ se presentan los focos y hay estabilidad asintótica.
A la derecha del eje $OD$ también se presentan focos, pero hay inestabilidad.
Si $D < 0$, entonces se tiene $T^{2} -4D > T^{2}$. En este caso los valores propios son reales y de distinto signo, lo que significa que se presentarán puntos silla e inestabilidad. En el plano traza – determinante los encontraremos por debajo del eje $T$.
Si $D > 0$ y $T^{2} -4D \geq 0$, entonces los valores propios son reales y tienen el mismo signo que $T$. Los casos posibles son:
Si $T < 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y negativos (atractor y estabilidad asintótica).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y negativos (nodo atractor y estabilidad asintótica).
Si $T > 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y positivos (repulsor e inestabilidad).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y positivos (nodo repulsor e inestabilidad).
Si $D = 0$, entonces uno o ambos valores propios son cero. Los siguientes casos se obtienen directamente de (\ref{11}) y (\ref{12}).
Si $T = 0$ (origen), entonces ambos valores propios son cero (recta de puntos de equilibrio y trayectorias paralelas a dicha recta).
Si $T > 0$, entonces un valor propio es cero y el otro es positivo (recta de puntos de equilibrio inestables y trayectorias rectas que se alejan de la recta de puntos de equilibrio).
Si $T < 0$, entonces un valor propio es cero y el otro es negativo (recta de puntos de equilibrio asintóticamente estables y trayectorias rectas que tienden a la recta de puntos de equilibrio).
¡Todo lo que hemos aprendido sobre sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales de primer orden con coeficientes constantes, incluyendo todas las características anteriores, se resume en el siguiente diagrama!.
Plano traza – determinante con todas las posibilidades de planos fase.
Veamos un ejemplo.
Ejemplo: Caracterizar el siguiente sistema lineal.
Como $T > 0$, $D > 0$ y $T^{2} -4D = 0$, vamos al punto 3 y deducimos que el sistema lineal tiene valores propios iguales y positivos. De acuerdo a las ecuaciones (\ref{11}) y (\ref{12}) se tiene el siguiente sistema.
\begin{align*} T &= 2 = \lambda_{1} + \lambda_{2} \\ D &= 1 = \lambda_{1}\lambda_{2} \end{align*}
De la primer ecuación obtenemos $\lambda_{1} = 2 -\lambda_{2}$, sustituyendo en la segunda ecuación se tiene
La única raíz es $\lambda_{2} = 1$, sustituyendo en cualquier ecuación del sistema obtenemos que $\lambda_{1} = 1$. Por lo tanto, el único valor propio de la matriz $\mathbf{A}$ es $\lambda = 1$ (iguales y positivos, tal como lo habíamos deducido).
Si vamos al plano traza – determinante, como $T > 0$ y $D > 0$, entonces estamos en el primer cuadrante, pero además $T^{2} -4D = 0$, así que estamos situados sobre la parábola del primer cuadrante, exactamente en el punto $(T, D) = (2, 1)$, esto nos permite concluir que el plano fase del sistema corresponde a repulsor.
El plano fase del sistema es el siguiente.
Plano fase del sistema.
Efectivamente se trata de un repulsor.
$\square$
Debido a que cada punto del plano traza – determinante representa un plano fase distinto, el plano traza – determinante es un ejemplo de lo que se conoce como plano paramétrico.
El plano paramétrico
El plano traza – determinante es un ejemplo de un plano paramétrico. Los elementos de la matriz $\mathbf{A}$ son parámetros que se pueden ajustar, cuando esos elementos cambian, la traza y el determinante de la matriz también se modifican y el punto $(T, D)$ se mueve en el plano paramétrico. Cuando este punto entra en las diversas regiones del plano traza – determinante, debemos imaginar que los retratos fase asociados también experimentan transformaciones.
El plano traza – determinante es un esquema de clasificación del comportamiento de todas las posibles soluciones de sistemas lineales.
En este enlace se tiene acceso a una herramienta visual del plano paramétrico. En él se puede mover el punto $(T, D)$ a lo largo de las diferentes regiones del plano traza – determinante a la vez que visualizamos el tipo de planos fase que se generan. ¡Pruébalo y diviértete!
Con esto concluimos el estudio de los sistemas lineales. Cabe mencionar que el plano traza – determinante no da una información completa sobre el sistema lineal tratado.
Por ejemplo, a lo largo de la parábola $T^{2} -4D = 0$ tenemos valores propios repetidos, pero no podemos determinar si tenemos uno o varios vectores propios linealmente independientes. para saberlo es preciso calcularlos.
De modo similar, no podemos determinar la dirección en que las soluciones se mueven alrededor del origen si $T^{2}-4D < 0$. Por ejemplo, las dos matrices
tienen traza $T = 0$ y determinante $D = 1$, pero las soluciones del sistema $\mathbf{Y}^{\prime} = \mathbf{AY}$ se mueven alrededor del origen en el sentido de las manecillas del reloj, mientras que las soluciones de $\mathbf{Y}^{\prime} = \mathbf{BY}$ viajan en el sentido opuesto.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Hacer un análisis cualitativo de los siguientes sistemas lineales apoyándose de la traza y el determinante de la matriz de coeficientes $\mathbf{A}$, así como del plano traza – determinante. Es decir, de acuerdo al valor de la traza $T$, el determinante $D$ y el discriminante $T^{2} -4D$, determinar que tipo de valores propios tiene el sistema, así como el tipo de plano fase y estabilidad del punto de equilibrio.
Estamos cerca de concluir el curso. En las próximas entradas estudiaremos de manera cualitativa a los sistemas no lineales compuestos por dos ecuaciones diferenciales de primer orden.
En particular, en la siguiente entrada veremos que alrededor de un punto de equilibrio de un sistema no lineal las trayectorias son muy parecidas a las de un sistema lineal lo que nos permitirá observar el comportamiento que tienen las soluciones del sistema no lineal, al menos cerca de un punto de equilibrio.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada continuamos con el estudio de eigenvalores y eigenvectores de matrices y trasformaciones lineales. Para ello, estudiaremos más a profundidad el polinomio característico.
Como recordatorio, en una entrada pasada demostramos que si $A$ es una matriz en $M_n(F)$, entonces la expresión $\det (\lambda I_n – A)$ es un polinomio en $\lambda$ de grado $n$ con coeficientes en $F$. A partir de ello, definimos el polinomio característico de $A$ como $$\chi_A(\lambda)=\det(\lambda I_n – A).$$
En esta entrada probaremos algunas propiedades importantes del polinomio característico de matrices. Además, hablaremos de la multiplicidad algebraica de los eigenvalores. Finalmente enunciaremos sin demostración dos teoremas fundamentales en álgebra lineal: el teorema de caracterización de matrices diagonalizables y el teorema de Cayley-Hamilton.
Las raíces del polinomio característico son los eigenvalores
Ya vimos que las raíces del polinomio característico son los eigenvalores. Pero hay que tener cuidado. Deben ser las raíces que estén en el campo en el cual la matriz esté definida. Veamos un ejemplo más.
Problema. Encuentra el polinomio característico y los eigenvalores de la matriz \begin{align*} \begin{pmatrix} 0&1&0&0\\ 2&0&-1&0\\ 0& 7 & 0 & 6\\ 0 & 0 & 3 & 0 \end{pmatrix}. \end{align*}
Solución. Debemos encontrar las raíces del polinomio dado por el siguiente determinante: \begin{align*} \begin{vmatrix} \lambda&-1&0&0\\ -2&\lambda&1&0\\ 0& -7 & \lambda & -6\\ 0 & 0 & -3 & \lambda \end{vmatrix}. \end{align*}
Haciendo expansión de Laplace en la primer columna, tenemos que este determinante es igual a
Para calcular los determinantes de cada una de las matrices de $3\times 3$ podemos aplicar la fórmula por diagonales para obtener: \begin{align*} \lambda\begin{vmatrix} \lambda&1&0\\ -7 & \lambda & -6\\ 0 & -3 & \lambda \end{vmatrix}&= \lambda(\lambda^3-18\lambda+7\lambda)\\ &=\lambda(\lambda^3-11\lambda)\\ &=\lambda^4-11\lambda^2 \end{align*}
Concluimos que el polinomio característico es \begin{align*} \lambda^4-13\lambda^2+36&=(\lambda^2-4)(\lambda^2-9)\\ &=(\lambda+2)(\lambda-2)(\lambda+3)(\lambda-3). \end{align*}
De esta factorización, las raíces del polinomio (y por lo tanto los eigenvalores que buscamos) son $-2,2,-3,3$.
Si quisiéramos encontrar un eigenvector para, por ejemplo, el eigenvalor $-2$, tenemos que encontrar una solución no trivial al sistema lineal de ecuaciones homogéneo $$(-2I_n-A)X=0.$$
$\triangle$
Propiedades del polinomio característico
Veamos ahora algunas propiedades importantes del polinomio característico. El primer resultado habla del polinomio característico de matrices triangulares superiores. Un resultado análogo se cumple para matrices inferiores, y su enunciado y demostración quedan como tarea moral.
Proposición. Si $A=[a_{ij}]$ es una matriz triangular superior en $M_n(F)$, entonces su polinomio característico es $$\chi_A(\lambda)=\prod_{i=1}^n (\lambda-a_{ii}).$$
Demostración. Como $A$ es triangular superior, entonces $\lambda I_n -A$ también, y sus entradas diagonales son precisamente $\lambda-a_{ii}$ para $i=1,\ldots,n$. Como el determinante de una matriz triangular es el producto de sus entradas en la diagonal, tenemos que $$\chi_A(\lambda)=\prod_{i=1}^n (\lambda-a_{ii}).$$
$\square$
Como el polinomio característico es un determinante, podemos aprovechar otras propiedades de determinantes para obtener otros resultados.
Proposición. Una matriz y su transpuesta tienen el mismo polinomio característico.
Demostración. Sea $A$ una matriz en $M_n(F)$. Una matriz y su transpuesta tienen el mismo determinante. Además, transponer es una transformación lineal. De este modo: \begin{align*} \chi_A(\lambda)&=\det(\lambda I_n – A)\\ &=\det({^t(\lambda I_n-A)})\\ &=\det(\lambda({^tI_n})-{^tA})\\ &=\det(\lambda I_n – {^tA})\\ &=\chi_{^tA}(\lambda). \end{align*}
$\square$
Ya antes habíamos mostrado que matrices similares tienen los mismos eigenvalores, pero que dos polinomios tengan las mismas raíces no necesariamente implica que sean iguales. Por ejemplo, los polinomios $$(x-1)^2(x+1) \quad \text{y} \quad (x+1)^2(x-1)$$ tienen las mismas raíces, pero no son iguales.
De esta forma, el siguiente resultado es más fuerte de lo que ya habíamos demostrado antes.
Proposición. Sean $A$ y $P$ matrices en $M_n(F)$ con $P$ invertible. Entonces $A$ y $P^{-1}AP$ tienen el mismo polinomio característico.
Demostración. El resultado se sigue de la siguiente cadena de igualdades, en donde usamos que $\det(P)\det(P^{-1})=1$ y que el determinante es multiplicativo:
Ten cuidado. El determinante es multiplicativo, pero el polinomio característico no es multiplicativo. Esto es evidente por el siguiente argumento. Si $A$ y $B$ son matrices en $M_n(F)$, entonces $\chi_A(\lambda)$ y $\chi_B(\lambda)$ son cada uno polinomios de grado $n$, así que su producto es un polinomio de grado $2n$, que por lo tanto no puede ser igual al polinomio característico $\chi_{AB}(\lambda)$ pues este es de grado $n$. Así mismo, $\chi_{A^2}(\lambda)$ no es $\chi_{A}(\lambda)^2$.
Una última propiedad que nos interesa es mostrar que el determinante de una matriz y su traza aparecen en los coeficientes del polinomio característico.
Teorema. Sea $A$ una matriz en $M_n(F)$ y $\chi_A(\lambda)$ su polinomio característico. Entonces $\chi_{A}(\lambda)$ es de la forma $$\lambda^n-(\text{tr} A) \lambda^{n-1}+\ldots+(-1)^n \det A.$$
Demostración. Tenemos que mostrar tres cosas:
El polinomio $\chi_{A}$ es mónico, es decir, tiene coeficiente principal $1$,
que el coeficiente del término de grado $n-1$ es $-\text{tr} A$ y
el coeficiente libre es $(-1)^n \det A$.
El coeficiente libre de un polinomio es su evaluación en cero. Usando la homogeneidad del determinante, dicho coeficiente es: \begin{align*} \chi_A(0)&=\det(0\cdot I_n-A)\\ &=\det(-A)\\ &=(-1)^n\det(A). \end{align*}
Esto muestra el tercer punto.
Para el coeficiente del término de grado $n-1$ y el coeficiente principal analicemos con más detalle la fórmula del determinante \begin{align*} \begin{vmatrix} \lambda – a_{11} & -a_{12} & \ldots & -a_{1n}\\ -a_{21} & \lambda – a_{22} & \ldots & -a_{1n}\\ \vdots & & \ddots & \\ -a_{n1} & -a_{n2} & \ldots & \lambda – a_{nn} \end{vmatrix} \end{align*} en términos de permutaciones.
Como discutimos anteriormente, la única forma de obtener un término de grado $n$ es cuando elegimos a la permutación identidad. Pero esto también es cierto para términos de grado $n-1$, pues si no elegimos a la identidad, entonces la permutación elige por lo menos dos entradas fuera de la diagonal, y entonces el grado del producto de entradas correspondiente es a lo más $n-2$.
De este modo, los únicos términos de grado $n$ y $n-1$ vienen del producto $$(\lambda-a_{11})\cdot\ldots\cdot(\lambda-a_{nn}).$$
El único término de grado $n$ viene de elegir $\lambda$ en todos los factores, y se obtiene el sumando $\lambda^n$, lo cual muestra que el polinomio es mónico.
Los únicos términos de grado $n-1$ se obtienen de elegir $\lambda$ en $n-1$ factores y un término del estilo $-a_{ii}$. Al considerar todas las opciones, el término de grado $n-1$ es $$-(a_{11}+a_{22}+\ldots+a_{nn})\lambda^{n-1}=-(\text{tr} A) \lambda^{n-1},$$ que era lo último que debíamos mostrar.
$\square$
Ejemplo. El teorema anterior muestra que si $A$ es una matriz en $M_2(F)$, es decir, de $2\times 2$, entonces $$\chi_A(\lambda)=\lambda^2 – (\text{tr}A) \lambda +\det A.$$ De manera explícita en términos de las entradas tendríamos entonces que si $A=\begin{pmatrix} a & b \\ c & d \end{pmatrix}$, entonces su polinomio característico es $$\lambda^2-(a+d)\lambda+(ad-bc).$$
Como ejemplo, si $A=\begin{pmatrix} 5 & 2 \\ -8 & -3 \end{pmatrix}$, entonces su polinomio característico es $$\lambda^2 -2\lambda +1=(\lambda-1)^2.$$ Su único eigenvalor sería entonces $1$.
$\triangle$
Suma y producto de eigenvalores de matrices complejas
A veces queremos referirnos al conjunto de todos los eigenvalores de una matriz.
Definición. Para $A$ una matriz en $M_n(F)$, el espectro de $A$ es el conjunto de eigenvalores de $A$. Lo denotamos por $\text{spec} (A)$
Tenemos una definición análoga para el espectro de una transformación lineal. Esa definición da un poco de intuición de por qué los teoremas de diagonalización de matrices se llaman teoremas espectrales. La siguiente definición habla de un sentido en el cual un eigenvalor «se repite».
Definición. Sea $A$ una matriz en $M_n(F)$ y $\lambda$ un eigenvalor de $A$. La multiplicidad algebraica de $\lambda$ es el mayor entero $m_{\lambda}$ tal que $(x-\lambda)^{m_\lambda}$ divide a $\chi_A(x)$.
Cuando estamos en $\mathbb{C}$, por el teorema fundamental del álgebra todo polinomio de grado $n$ se puede factorizar en exactamente $n$ términos lineales. Además, los polinomios característicos son mónicos. De este modo, si tenemos una matriz $A$ en $M_n(\mathbb{C})$, su polinomio característico se puede factorizar como sigue:
en donde $\lambda_1,\ldots,\lambda_n$ son eigenvalores de $A$, no necesariamente distintos, pero en donde cada eigenvalor aparece en tantos términos como su multiplicidad algebraica.
Desarrollando parcialmente el producto del lado derecho, tenemos que el coeficiente de $\lambda^{n-1}$ es $$-(\lambda_1+\ldots+\lambda_n)$$ y que el coeficiente libre es $$(-1)^n\lambda_1\cdot\ldots\cdot\lambda_n.$$ Combinando este resultado con el de la sección anterior y agrupando eigenvalores por multiplicidad, se demuestra el siguiente resultado importante. Los detalles de la demostración quedan como tarea moral.
Teorema. Sea $A$ una matriz en $M_n(\mathbb{C})$
La traza $A$ es igual a la suma de los eigenvalores, contando multiplicidades algebraicas, es decir: $$\text{tr} A = \sum_{\lambda \in \text{spec}(A)} m_{\lambda} \lambda.$$
El determinante de $A$ es igual al producto de los eigenvalores, contando multiplicidades algebraicas, es decir: $$\det A = \prod_{\lambda \in \text{spec} (A)} \lambda^{m_{\lambda}}.$$
Veamos un problema en donde se usa este teorema.
Problema. Sea $A$ una matriz en $M_n(\mathbb{C})$ tal que $A^2-4A+3I_n=0$. Muestra que el determinante de $A$ es una potencia de $3$.
Solución. Sea $\lambda$ un eigenvalor de $A$ y $v$ un eigenvector para $\lambda$. Tenemos que $$A^2v=A(\lambda v) = \lambda(Av)=\lambda^2 v.$$ De esta forma, tendríamos que \begin{align*} 0&=(A^2-4A+3I_n)v\\ &=(\lambda^2 v – 4\lambda v + 3 v)\\ &=(\lambda^2-4\lambda+3) v. \end{align*}
Como $v$ no es el vector $0$, debe suceder que $\lambda^2-4\lambda+3=0$. Como $\lambda^2-4\lambda+3 = (\lambda-3)(\lambda-1)$, entonces $\lambda=1$ ó $\lambda=3$. Con esto concluimos que los únicos posibles eigenvectores de $A$ son $1$ y $3$.
Como $A$ es una matriz en $\mathbb{C}$, tenemos entonces que su polinomio característico es de la forma $(x-1)^a(x-3)^b$ con $a$ y $b$ enteros no negativos tales que $a+b=n$. Pero entonces por el teorema de producto de eigenvalores, tenemos que el determinante es $1^a\cdot 3^b=3^b$, con lo que queda demostrado que es una potencia de $3$.
$\square$
Dos teoremas fundamentales de álgebra lineal (opcional)
Tenemos todo lo necesario para enunciar dos resultados de álgebra lineal. Sin embargo, las demostraciones de estos resultados requieren de más teoría, y se ven en un siguiente curso. No los demostraremos ni los usaremos en el resto de este curso, pero te pueden servir para anticipar el tipo de resultados que verás al continuar tu formación en álgebra lineal.
El primer resultado fundamental es una caracterización de las matrices que pueden diagonalizarse. Para ello necesitamos una definición adicional. Hay otro sentido en el cual un eigenvalor $\lambda$ de una matriz $A$ puede repetirse.
Definición. Sea $A$ una matriz en $M_n(F)$ y $\lambda$ un eigenvalor de $A$. La multiplicidad geométrica de $\lambda$ es la dimensión del kernel de la matriz $\lambda I_n -A$ pensada como transformación lineal.
En estos términos, el primer teorema al que nos referimos queda enunciado como sigue.
Teorema. Una matriz $A$ en $M_n(F)$ es diagonalizable si y sólo si su polinomio característico $\chi_A(\lambda)$ se puede factorizar en términos lineales en $F[\lambda]$ y además, para cada eigenvalor, su multiplicidad algebraica es igual a su multiplicidad geométrica.
Ejemplo. La matriz $$A=\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}$$ tiene como polinomio característico a $\chi_A(\lambda)=\lambda^2+1$. Este polinomio no se puede factorizar en $\mathbb{R}[x]$, así que $A$ no es diagonalizable con matrices de entradas reales.
Sin embargo, en $\mathbb{C}$ tenemos la factorización en términos lineales $\lambda^2+1=(\lambda+i)(\lambda-i),$ que dice que $i$ y $-i$ son eigenvalores de multiplicidad algebraica $1$. Se puede mostrar que la multiplicidad geométrica también es $1$. Así, $A$ sí es diagonalizable con matrices de entradas complejas.
$\square$
El segundo resultado fundamental dice que «cualquier matriz se anula en su polinomio característico». Para definir correctamente esto, tenemos que decir qué quiere decir evaluar un polinomio en una matriz. La definición es más o menos natural.
Definición. Si $A$ es una matriz en $M_n(F)$ y $p$ es un polinomio en $F[\lambda]$ de la forma $$p(\lambda)=a_0+a_1\lambda+a_2\lambda^2+\ldots+a_n\lambda^n,$$ definimos a la matriz $p(A)$ como la matriz $$a_0I_n+a_1A+a_2A^2+\ldots+a_nA^n.$$
En estos términos, el resultado queda enunciado como sigue.
Teorema (Cayley-Hamilton). Si $A$ es una matriz en $M_n(F)$ y $\chi_A(x)$ es su polinomio característico, entonces $$\chi_A(A)=O_n.$$
Ejemplo. Tomemos de nuevo a la matriz $$A=\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}$$ del ejemplo anterior. Su polinomio característico es $x^2+1$. En efecto, verificamos que se cumple el teorema de Cayley-Hamilton pues: \begin{align*} A^2+I_2 &= \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} + \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\\ &=\begin{pmatrix} -1 & 0 \\ 0 & -1 \end{pmatrix}+\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\\ &=\begin{pmatrix} 0 & 0 \\ 0 & 0 \end{pmatrix}. \end{align*}
$\square$
Más adelante…
En esta entrada estudiamos algunas propiedades de los eigenvalores y eigenvectores de transformaciones lineales y matrices; vimos cómo obtener eigenvalores de una matriz a partir del polinomio característico y enunciamos dos teoremas muy importantes como parte opcional del curso.
En la siguiente entrada haremos varios ejercicios para desarrollar un poco de práctica al obtener los eigenvalores y eigenvectores de una transformación lineal y de una matriz.
Entradas relacionadas
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Enuncia y demuestra cómo es el polinomio característico de una matriz triangular inferior.
Completa los detalles de la demostración del teorema de suma y producto de eigenvalores. Úsalo para encontrar la suma y producto (con multiplicidades) de los eigenvalores de la matriz $$\begin{pmatrix}5 & 0 & -1 & 2 \\ 3 & -2 & 1 & -2 \\ 0 & 0 & 0 & 5\\ 0 & 2 & 4 & 0 \end{pmatrix}.$$
Sea $A$ una matriz en $M_n(F)$. ¿Cómo es el polinomio característico de $-A$ en términos del polinomio característico de $A$?
Tomemos $A$ una matriz en $M_n(F)$ y $k$ un entero positivo. Muestra que si $\lambda$ es un eigenvalor de la matriz $A$, entonces $\lambda^k$ es un eigenvalor de la matriz $A^k$.
De la sección opcional:
Demuestra, haciendo todas las cuentas, el caso particular del teorema de Cayley-Hamilton para matrices de $2\times 2$.
Ya sabemos calcular el polinomio característico de matrices diagonales. Muestra el teorema de Cayley-Hamilton en este caso particular.
Las matrices diagonales trivialmente son diagonalizables. Muestra que la multiplicidad algebraica de sus eigenvalores en efecto coincide con la multiplicidad geométrica.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104721 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM»
En esta entrada haremos una serie de problemas que nos ayudarán como repaso de los temas vistos durante las últimas dos semanas. Mostraremos algunas propiedades bastante interesantes acerca de las transformaciones alternantes y antisimétricas, así como de la transformación estrella de esta semana: el determinante.
Problemas de transformaciones antisimétricas
En la entrada del miércoles 6 de mayo, hablábamos sobre la equivalencia entre transformaciones alternantes y antisimétricas, justo resaltamos que ésto no es cierto si el campo $F$ es $\mathbb{Z}_2$, y el siguiente ejemplo lo expone:
Ejemplo. Sea $f:\mathbb{Z}_2 \times \mathbb{Z}_2 \rightarrow \mathbb{Z}_2$ definido como $f(x,y)=xy$. Claramente $f$ es bilineal, pero no es alternate ya que $f(1,1)=1\neq 0$. Por otro lado, $f$ es antisimétrica, porque $f(x,y)+f(y,x)=xy+yx=2xy=0$.
$\triangle$
De manera natural surge la pregunta: ¿cómo podemos construir una transformación $d$-lineal antisimétrica o alternante? El siguiente problema muestra un camino para obtener una transformación antisimétrica dada un mapeo $d$-lineal $f$.
Problema. Sea $f:V^d \rightarrow W$ una transformación $d$-lineal. Demuestra que
Solución. Es fácil ver que $A(f)$ es una transformación $d$-lineal, dado que $A(f)$ es una combinación lineal de mapeos $d$-lineales. Queremos probar que, para $\tau \in S_d$, $\tau (A(f))=\text{sign}(\tau) A(f)$. Notemos que
Ahora continuando con la discusiones del determinante, sabemos que éste es una forma $n$-lineal alternante, y además que cualquier otra forma $n$-lineal alternante varía de $\det(b_1,\ldots,b_n)$ únicamente por un factor multiplicativo. Otro resultado interesante ese teorema es el siguiente:
Problema 1. Sea $V$ un espacio vectorial sobre $F$ de dimensión finita. Sea $e_1,\ldots,e_n$ una base de $V$ y sea $T:V\rightarrow V$ una transformación lineal. Demuestra que para todo $v_1,\ldots,v_n\in V$ tenemos que
Esta transformación es la suma de transformaciones $n$-lineales, por lo tanto $\phi$ es $n$-lineal. Más aún, es alternante, ya que si asumimos, por ejemplo, que $v_1=v_2$, entonces
para todo $v_1,\ldots,v_n$. Sea $A=[a_{ij}]$ la matriz de $T$ con respecto a la base canónica. Si tomamos $v_1=e_1,\ldots,v_n=e_n$, por el mismo teorema tenemos que
Por último, los siguientes dos problemas nos ilustran como podemos obtener información de las matrices de manera fácil y «bonita», usando algunas propiedades de los determinantes vistas en la sesión del martes pasado.
Problema 2. Sea $n$ un número impar y sean $A,B\in M_n(\mathbb{R})$ matrices tal que $A^2+B^2=0_n$. Prueba que la matriz $AB-BA$ no es invertible.
Solución. Notemos que
$(A+iB)(A-iB)=A^2+B^2+i(BA-AB)=i(BA-AB).$
Por la propiedad del determinante de un producto, tenemos que
$\det(A+iB)\det(A-iB)=i^n \det(BA-AB).$
Suponemos que $AB-BA$ es invertible, entonces $\det(BA-AB)\neq 0$. Además sabemos que
esto implica que $|\det(A+iB)|^2=i^n\det(BA-AB).$ Como consecuencia, $i^n$ es un número real, contradiciendo al hecho que $n$ es impar. Por lo tanto $\det(BA-AB)=0$.
$\square$
Problema 3. Para $1\leq i,j\leq n$, definimos $a_{ij}$ como el número de divisores positivos en común de $i$ y $j$ y definimos $b_{ij}$ igual a 1 si $j$ divide $i$ e igual a 0 si no.
Probar que $A=B\cdot ^t B$, donde $A=[a_{ij}]$ y $B=[b_{ij}]$.
Notemos que $b_{ik}b_{jk}$ no es cero ($b_{ij},b_{jk}=1$) si y sólo si $k$ divide a $i$ y a $j$, esto implica que la cantidad de términos de la suma no ceros corresponde exactamente con la cantidad de los divisores en común que tengan $i$ y $j$. Por lo tanto $\det(B\cdot ^tB)_{ij}=a_{ij}$.
2) Si $i<j$, no es posible que $j$ divida a $i$. Entonces $b_{ij}=0$ para todo $i<j$, esto significa que $B$ es, al menos, triangular inferior. Un dato más que podemos asegurar es que $b_{ii}=1$ para toda $i$, por lo tanto, al menos, todos los términos de la diagonal de $B$ son iguales a 1.
3) Dada la propiedad multiplicativa del determinante, dado que $\det(B)=\det(^tB)$ y usando el inciso (1), tenemos que $\det(A)=\det(B\cdot ^tB)=(\det B)^2.$ Pero por el inciso (2), $\det B=1$, concluimos que $\det A=1$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104721 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM»