
Introducción
En esta primera unidad abordaremos varios los temas relacionados con las circunferencias coaxiales. Para ello, iniciaremos hablando de la potencia de un punto con respecto a una circunferencia. A grandes rasgos, esto trata de lo siguiente.
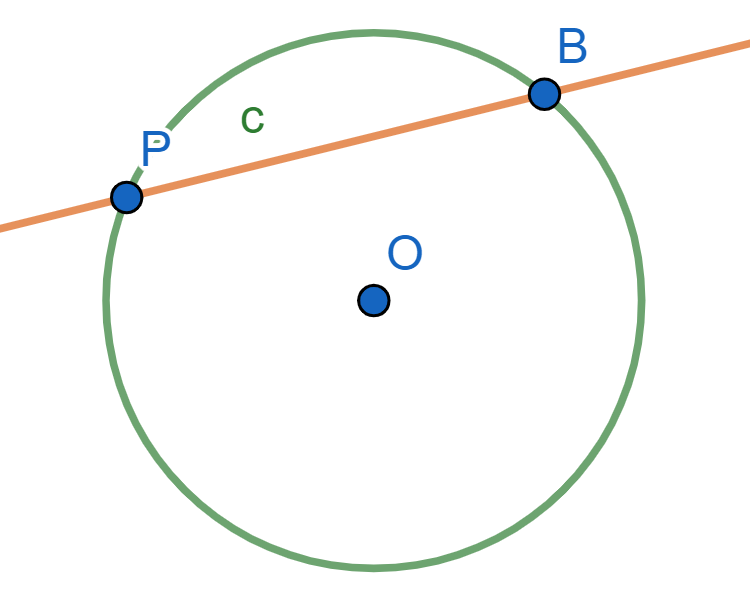
Tomemos una circunferencia $\mathcal{C}$. Tomemos $P$ un punto cualquiera. Tomemos una recta $l$ por $P$ y llamemos $A$ y $B$ los puntos de intersección de $l$ con $\mathcal{C}$. Bajo estas elecciones, la potencia de $P$ será $PA\cdot PB$. Lo que veremos en esta entrada es que dicho producto es constante sin importar la elección de $l$. Para mostrar esto, introduciremos algunas definiciones y posteriormente haremos una demostración por casos.
Definición de potencia de un punto
Comenzaremos dando una primer definición de potencia, que dependerá de cierto punto, circunferencia y recta que elijamos.
Definición. Sea $\mathcal{C}$ una circunferencia, $P$ un punto y $l$ una recta que intersecta a $\mathcal{C}$. Sean $A$ y $B$ los puntos de intersección de $l$ y $\mathcal{C}$ ($A=B$ si $l$ es tangente a $\mathcal{C}$). La potencia de $P$ con respecto a $\mathcal{C}$ en la recta $l$ es la cantidad $PA\cdot PB$. Usaremos la siguiente notación: $$\text{Pot}(P,\mathcal{C},l):=PA\cdot PB.$$
En esta definición y de aquí en adelante, a menos que se diga lo contrario, se estará trabajando con segmentos dirigidos. Es decir, estamos pensando que cada segmento tiene una dirección del primer punto al segundo. Así, por ejemplo, el valor de $PA$ dependerá de la longitud del segmento y su signo dependerá de una dirección (usualmente implícita) que se le asigne a la recta por $A$ y $P$. De este modo, tendremos, por ejemplo, que $PA=-AP$.
La definición de potencia de un punto puede simplificarse notablemente en vista de la siguiente proposición.
Proposición. La potencia de un punto con respecto a una circunferencia no depende de la recta elegida. Es decir, tomemos $\mathcal{C}$ una circunferencia, $P$ un punto y $l,m$ rectas. Supongamos que los puntos de intersección de $l$ con $\mathcal{C}$ son $A$ y $B$; y que los puntos de intersección de $m$ con $\mathcal{C}$ son $C$ y $D$ (en caso de tangencias, repetimos los puntos). Entonces: $$PA\cdot PB = PC\cdot PD.$$
Demostración. Haremos la demostración por casos de acuerdo a cuando $P$ está dentro o fuera de la circunferencia, o sobre ella.
Dentro de la circunferencia:
Tomemos las cuerdas $AB$ y $CD$ en la circunferencia, las cuales se cortan en $P$. Los triángulos $\triangle APC$ y $\triangle DPB$ son semejantes ya que:
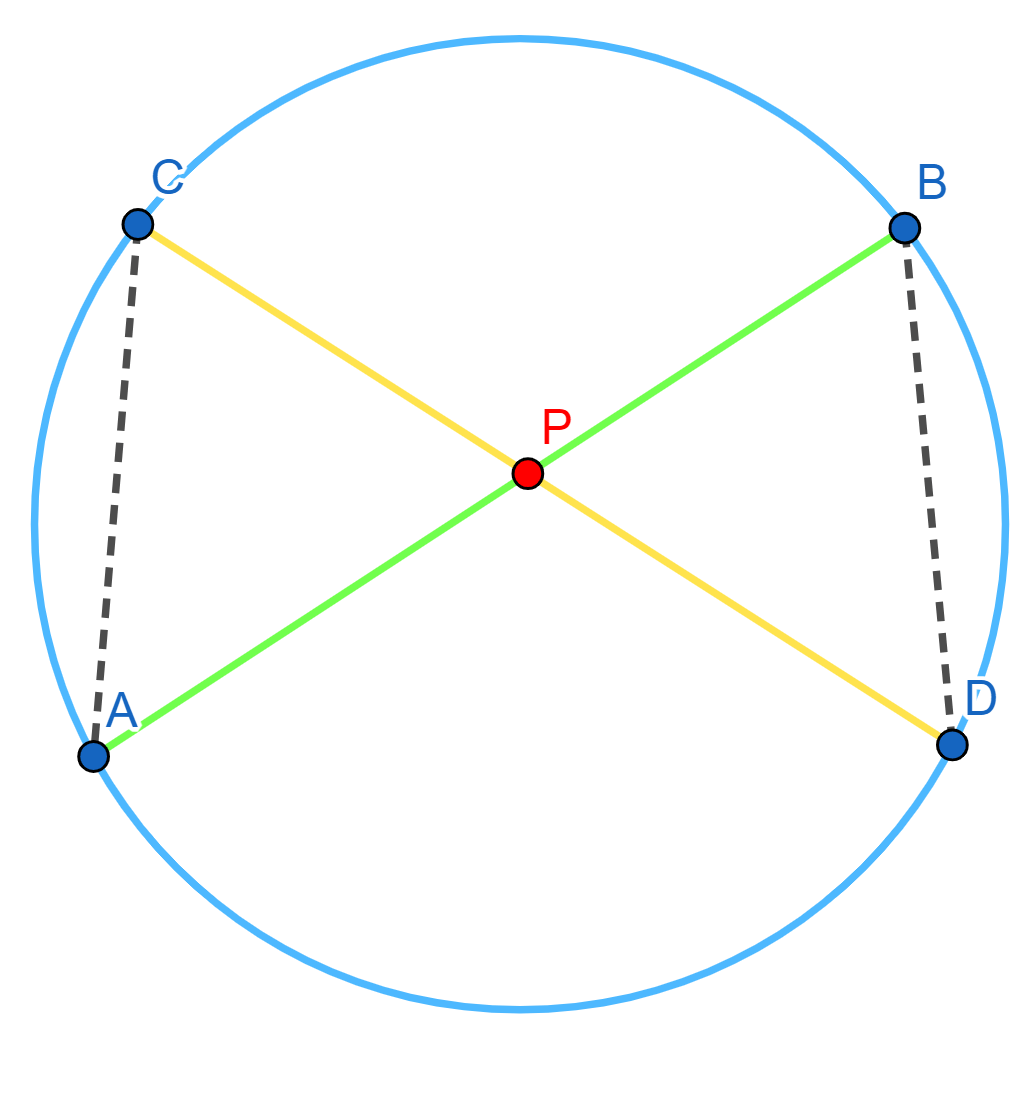
- $\angle PAC = \angle PDB $ por abrir el mismo arco $\overline{BC}$.
- $\angle APC = \angle BPD $ por ser opuestos al vértice.
- $\angle PCA = \angle PBD $ por abrir mismo arco $\overline{AD}$.
Entonces de la semejanza $\triangle APC \cong \triangle DPB $ tenemos que
$\frac{PA}{PD}=\frac{PC}{PB},$
de donde obtenemos la igualdad $PA\cdot PB =PC \cdot PD$ deseada.
Fuera de la circunferencia:
Ahora, $AB$ y $CD$ son dos secantes que se intersecan en $P$, pero con $P$ exterior a $\mathcal{C}$. Tenemos que $\triangle APC $ y $\triangle DPB $ son semejantes, ya que:
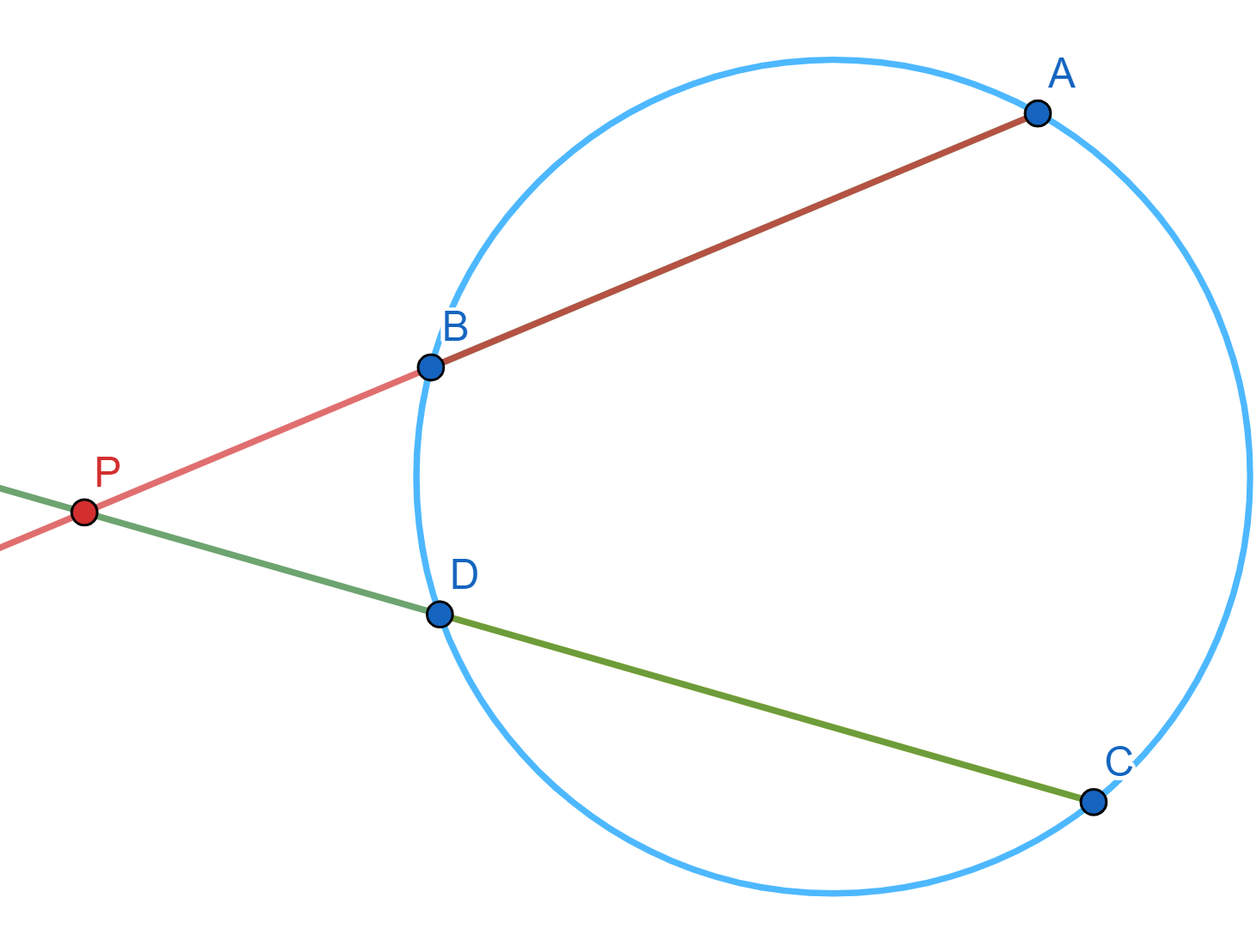
- El cuadrilátero $\square ABDC$ es cíclico, entonces: $\angle ACD + \angle ABD = 180^\circ$ y $\angle ABD + \angle DBP = 180^\circ $, de donde $\angle DBP = \angle ACD$.
- $\angle BPD$ y $\angle CPA$ son los mismos ángulos.
Entonces $\frac{PA}{PC}=\frac{PD}{PB},$ de donde se obtiene la igualdad buscada $PA\cdot PB=PC\cdot PD.$
Sobre la circunferencia:
Este caso es sencillo pues sin importar las secantes tomadas, en cada una hay un punto igual a $P$ y por lo tanto una distancia igual a cero. De este modo, $PA\cdot PB=0=PC\cdot PD$.
$\square$
Nota que las demostraciones anteriores sirven aunque $l$ ó $m$ sean tangentes, sólo que hay que hacer ligeras adaptaciones sobre los ángulos usados y los motivos por los que son iguales. Enunciaremos el caso de la tangencia un poco más abajo.
En vista de la proposición anterior, podemos simplificar nuestra definición notablemente.
Definición. Sea $\mathcal{C}$ una circunferencia y $P$ un punto. Tomemos $l$ una recta que intersecta a $\mathcal{C}$. Sean $A$ y $B$ los puntos de intersección de $l$ y $\mathcal{C}$ ($A=B$ si $l$ es tangente a $\mathcal{C}$). La potencia de $P$ con respecto a $\mathcal{C}$ es la cantidad $PA\cdot PB$. Usaremos la siguiente notación: $$\text{Pot}(P,\mathcal{C}):=PA\cdot PB.$$
La potencia queda bien definida sin importar la recta $l$, debido a la proposición anterior.
El signo de la potencia
En esta definición estamos usando segmentos dirigidos, y eso nos lleva a que la potencia de un punto puede tener distintos signos. El comportamiento queda determinado por el siguiente resultado.
Proposición. La potencia de un punto $P$ con respecto a una circunferencia $\mathcal{C}$ es positiva, negativa o cero, de acuerdo a si el punto $P$ está fuera de $\mathcal{C}$, dentro de ella, o sobre ella, respectivamente.
Demostración. Veamos esto caso por caso.
- Sea $P$ un punto externo a $\mathcal{C}$. Entonces $PA$ y $PB$ tienen la misma orientación y por lo tanto el mismo signo. Además, como $P$ no está sobre $\mathcal{C}$, ninguno de ellos es cero. Así, $\text{Pot}(P,\mathcal{C})> 0$.
- Sea $P$ un punto interno a $\mathcal{C}$. Entonces $PA$ está dirigido hacia un lado y $PB$ está dirigido hacia el otro, de modo que tienen signo contrario. Además, ninguno de ellos es cero. Así, $\text{Pot}(P,\mathcal{C})<0$.
- Finalmente, sea $P$ un punto sobre $\mathcal{C}$. Esto quiere decir que alguno de los puntos $A$ o $B$ es $P$ (quizás ambos, si $l$ es tangente). Así, $PA=0$ ó $PB=0$. De este modo $\text{Pot}(P,\mathcal{C})=0$.
$\square$
Otras fórmulas para la potencia
La potencia es invariante sin importar la recta elegida. De este modo, podemos elegir a una recta tangente y obtener una fórmula para la potencia en términos de la longitud de dicha tangente.
Proposición. Sea $\mathcal{C}$ una circunferencia. Para un punto $P$ fuera de $\mathcal{C}$, su potencia es igual al cuadrado de la longitud de una tangente de él a la circunferencia.
Es decir, sea $T$ un punto sobre la circunferencia tal que $PT$ sea tangente a $\mathcal{C}$. Entonces, $\text{Pot}(P,\mathcal{C})=PT^2$.
El resultado se sigue de llevar al límite lo que ya probamos en la proposición de invarianza de la potencia. Pero a continuación damos un argumento alternativo.
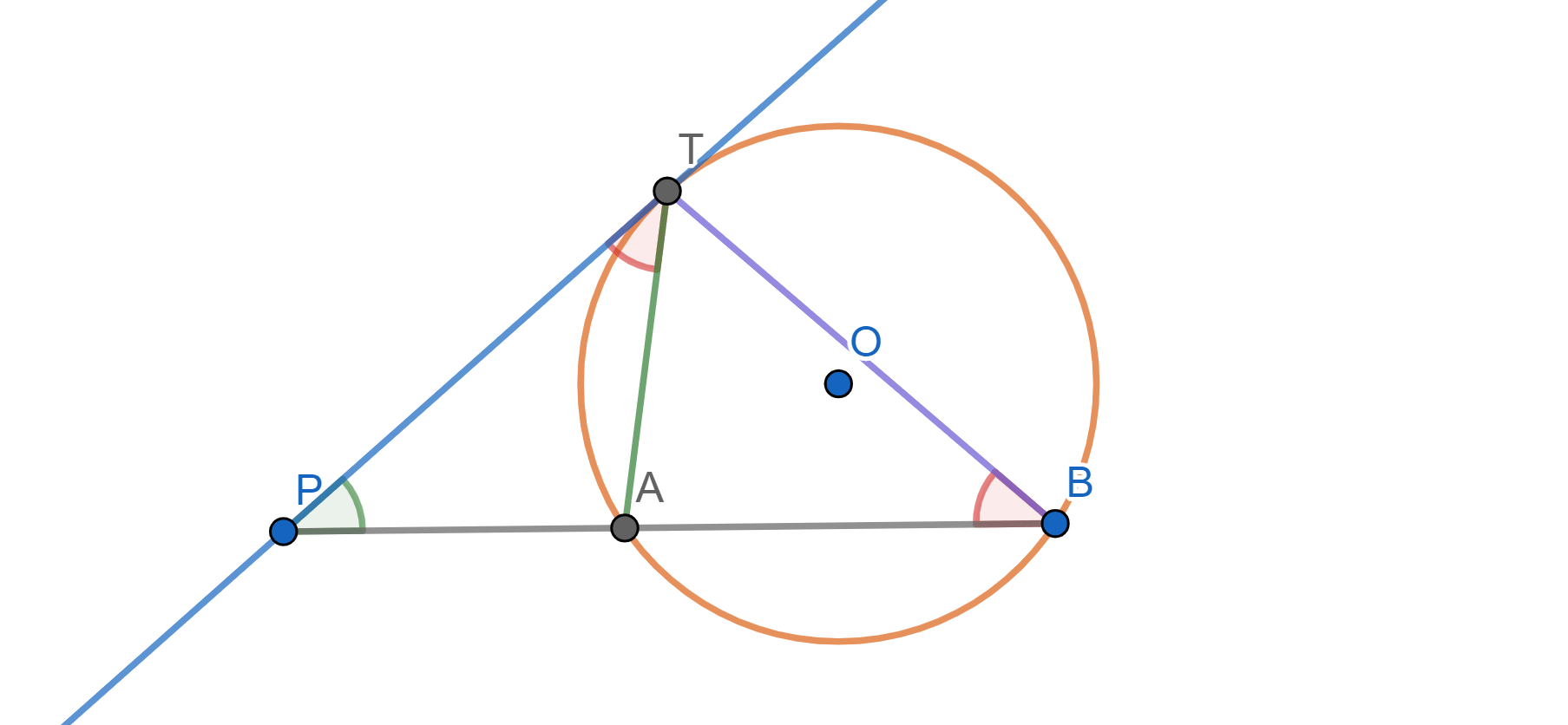
Demostración. Tracemos otra recta por $P$ que no sea tangente a $\mathcal{C}$ y cuyos puntos de intersección con $\mathcal{C}$ son $A$ y $B$ como en la figura. Tenemos que mostrar que $PA\cdot PB =PT^2$.
El ángulo $\angle PTA$ es semi-inscrito y es igual al ángulo inscrito $ \angle TBA$, pues ambos tienen el mismo arco $\overline{AT}$.
Entonces los triángulos $\triangle APT$ y $\triangle TPB$ comparten el ángulo con vértice en $P$ y $\angle PTA=\angle TBA$. Por ello, se tiene que $\triangle APT \cong \triangle TPB $ son semejantes y sus lados son proporcionales: $\frac{PA}{PT} = \frac{PT}{PB}$. De aquí, $$PT^2=PT\cdot PT=PA\cdot PB=\text{Pot}(P,\mathcal{C}).$$
$\square$
También es posible conocer la potencia de un punto hacia una circunferencia si conocemos el radio de la circunferencia y la distancia del punto al centro.
Proposición. Sea $\mathcal{C}$ una circunferencia de centro $O$ y radio $r$. Sea $P$ un punto en cualquier posición. La potencia de $P$ con respecto a $\mathcal{C}$ es $$\text{Pot}(P,\mathcal{C}) = OP^2 – r^2.$$
Demostración. Haremos la demostración por casos
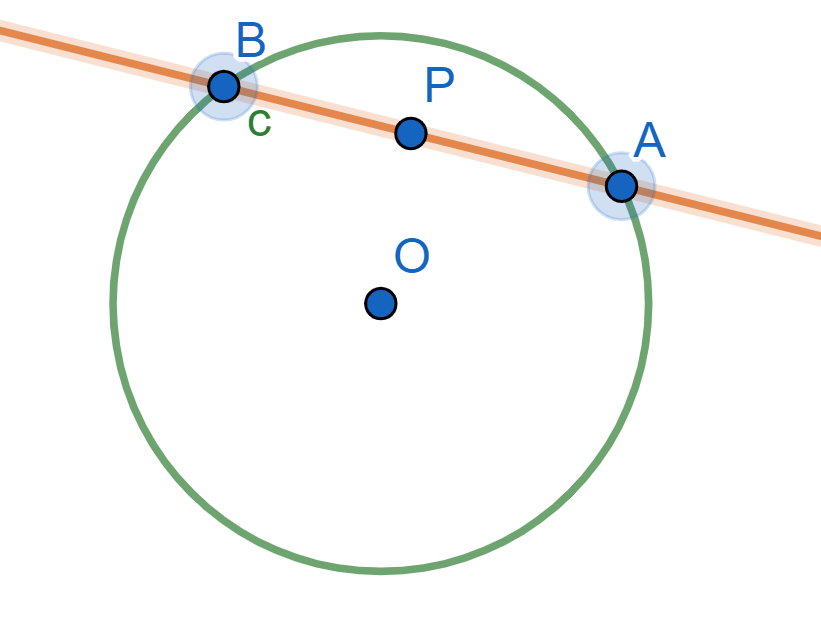
Dentro de la circunferencia:
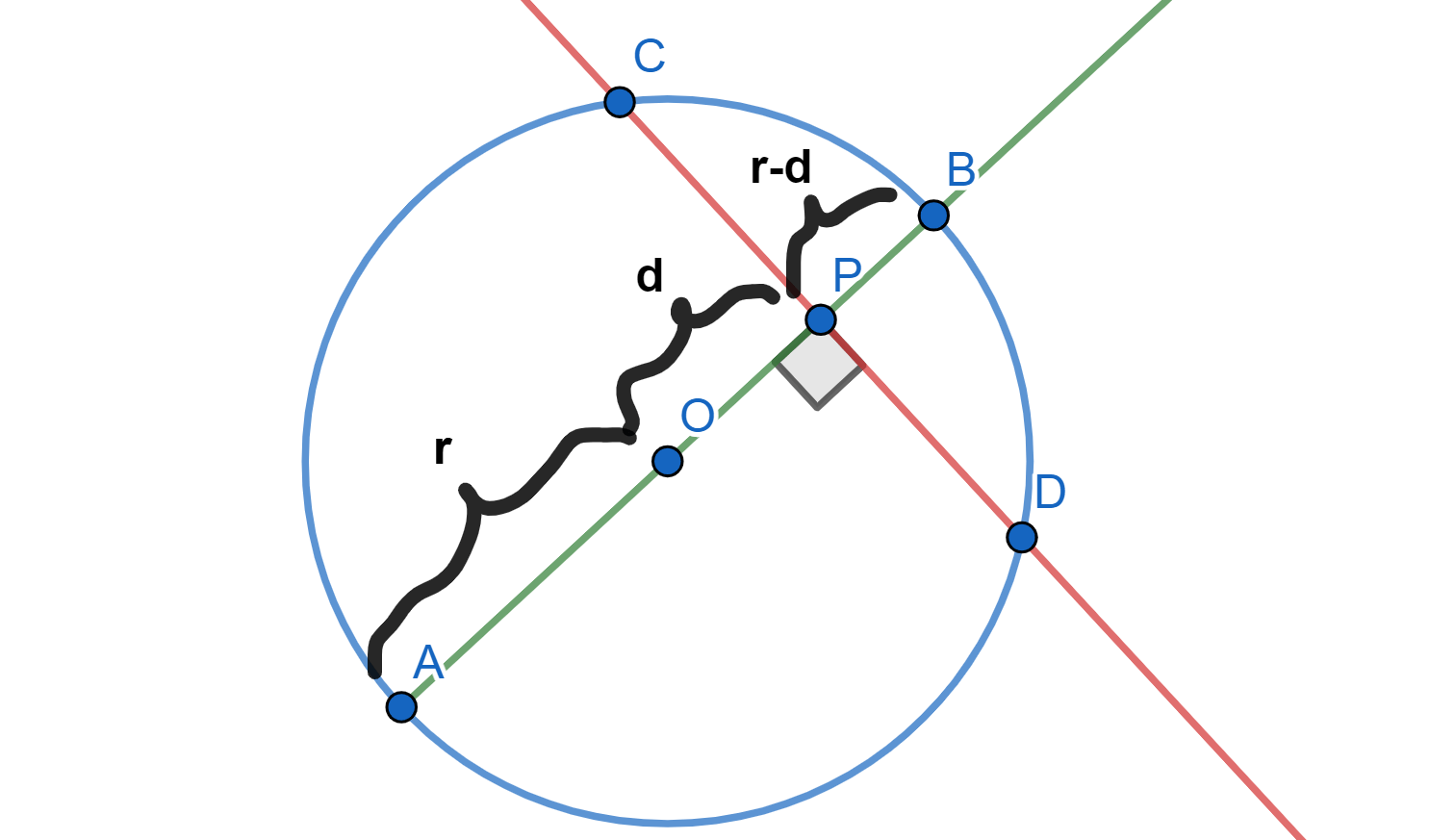
Sea $AB$ la cuerda que pasa por el centro $O$ y $P$ (si $O=P$, tomamos cualquier cuerda $AB$ por el centro). Supongamos sin pérdida de generalidad que la recta está dirigida de $A$ a $B$. Tenemos que $AO=r>0$ y llamemos $d=OP>0$. De aquí, $PB=r-d>0$. La siguiente figura resume estas igualdades.
La potencia desde $P$ sería entonces, cuidando los signos:
\begin{align*}
PA\cdot PB &= (PO+OA)(PB)\\
&=(-d-r)(r-d)\\
&=-(d+r)(r-d)\\
&=-(r^2-d^2)\\
&=d^2-r^2\\
&=OP^2-r^2.
\end{align*}
Así, $\text{Pot}(P,\mathcal{C})=OP^2-r^2$.
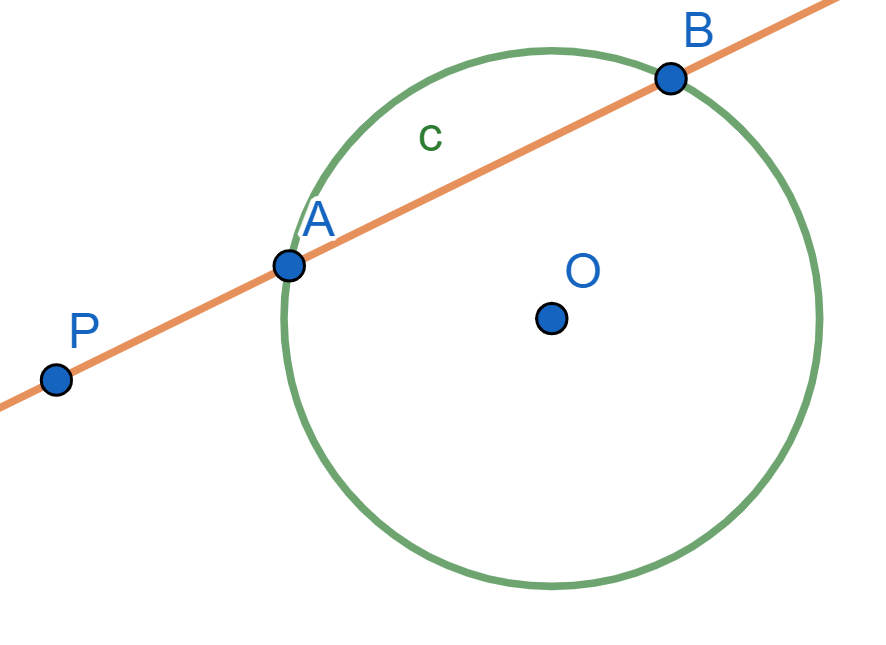
Fuera de la circunferencia:
Ahora desde $P$ tracemos una tangente $PT$ a $\mathcal{C}$ con $T$ sobre $\mathcal{C}$. Como $\angle PTO =90^o$, entonces $\triangle POT$ es un triángulo rectángulo.
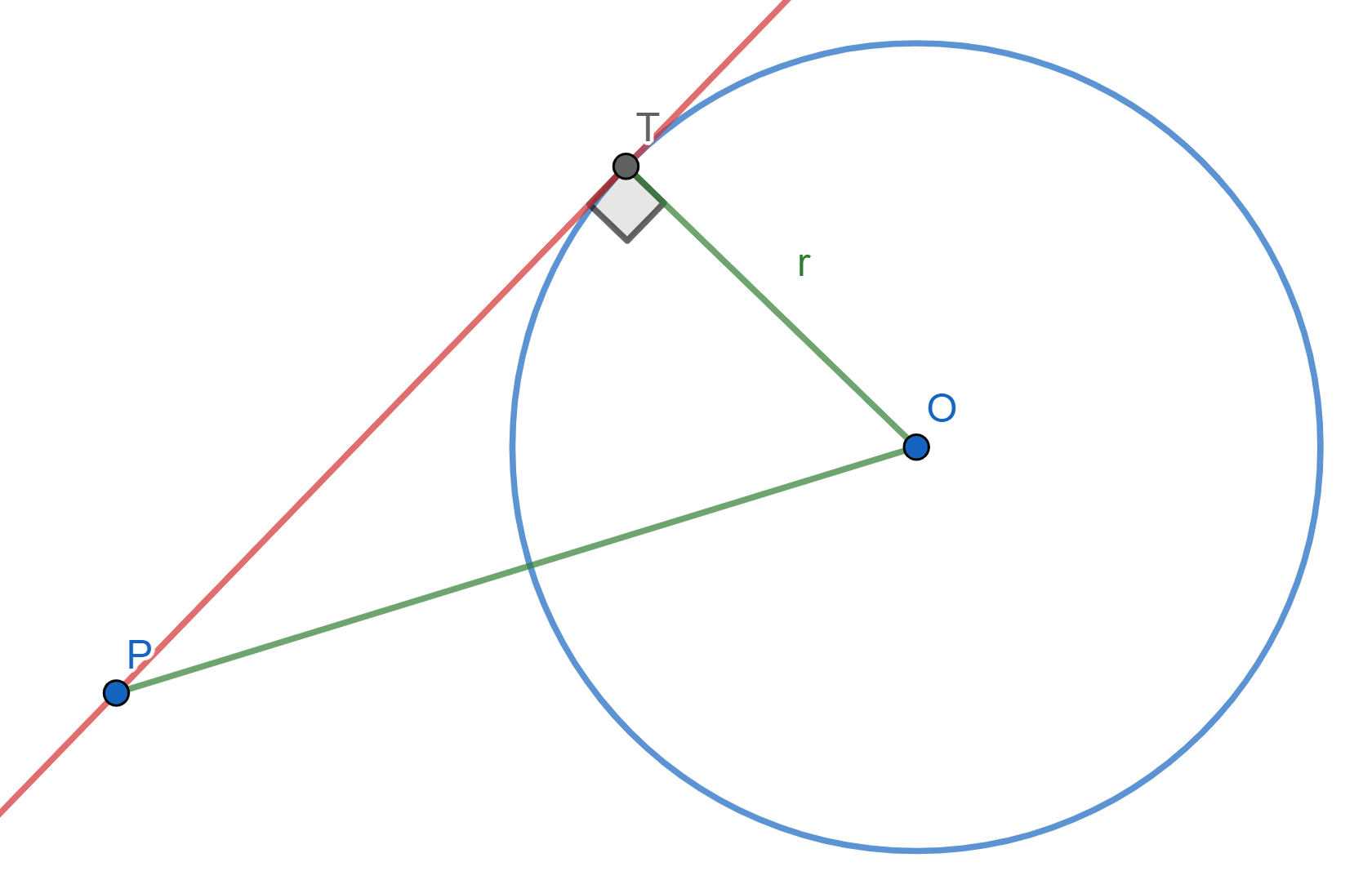
Por el teorema de Pitágoras y la expresión de potencia en términos de la tangente: $$OP^2=r^2+PT^2=r^2+\text{Pot}(P,\mathcal{C}).$$ Despejando, obtenemos la expresión deseada: $$\text{Pot}(P,\mathcal{C})=OP^2-r^2.$$
Sobre la circunferencia:
Este caso es sencillo, pues sabemos que la potencia de $P$ debe ser cero. Pero además, como $P$ está en la circunferencia, entonces $OP=r$, de modo que $OP^2-r^2=0$, y entonces la expresión también es lo que queremos.
$\square$
Más adelante…
Seguiremos abordando el tema de potencia de un punto y veremos cómo a partir de él se define el eje radical de dos circunferencias.
Entradas relacionadas
- Ir a Geometría Moderna II
- Entrada anterior del curso: Geometría Moderna II
- Siguiente entrada del curso: Eje Radical de 2 circunferencias
