Tenemos ya la definición de diferenciabilidad, y su versión manejable: la matriz jacobiana. Seguiremos construyendo conceptos y herramientas del análisis de los campos vectoriales muy importantes e interesantes. A continuación, enunciaremos una nueva versión de la regla de la cadena, que nos permitirá calcular las diferenciales de composiciones de campos vectoriales entre espacios de dimensión arbitraria. Esta regla tiene numerosas aplicaciones y es sorprendentemente fácil de enunciar en términos de producto de matrices.
Primeras ideas hacia la regla de la cadena
La situación típica de regla de la cadena es considerar dos funciones diferenciables que se puedan componer. A partir de ahí, buscamos ver si la composición también es diferenciable y, en ese caso, intentamos dar la derivada de la composición en términos de las derivadas de las funciones. Veamos qué pasa en campos vectoriales.
Pensemos en $f:S_{f}\subseteq \mathbb{R}^{m}\rightarrow \mathbb{R}^{n}$, $g:S_{g}\subseteq \mathbb{R}^{l}\rightarrow \mathbb{R}^{m}$ y en su composición $h=f\circ g$ definida sobre alguna vecindad $V\subseteq S_g$ de $\bar{a}$ y tal que $g(V)\subseteq S_f$. Pensemos que $g$ es diferenciable en $\bar{a}$ con derivada $G_\bar{a}$ y que $f$ es diferenciable en $\bar{b}:=g(\bar{a})$ con derivada $F_\bar{b}$.
Exploremos la diferenciabilidad de la composición $h$ en el punto $\bar{a}$. Para ello, tomemos un $\bar{y}\in \mathbb{R}^{l}$ tal que $\bar{a}+\bar{y}\in V$ y consideremos la siguiente expresión:
con $\lim\limits_{\bar{y}\to \bar{0}}E_{f}(\bar{b};\bar{v})=0$.
Concatenando nuestras igualdades, podemos reescribir esto como
\[ h(\bar{a}+\bar{y})-h(\bar{a})=(F_{\bar{b}}\circ G_{\bar{a}})(\bar{y})+||\bar{y}||E_{h}(\bar{a};\bar{y}),\] en donde hemos definido
\[ E_{h}(\bar{a};\bar{y})=(F_{\bar{b}}\circ E_{g})(\bar{a};\bar{y})+\frac{||\bar{v}||}{||\bar{y}||}E_{f}(\bar{b};\bar{v}).\] Si logramos demostrar que $\lim\limits_{\bar{y}\to \bar{0}}E_{h}(\bar{a};\bar{y})=0$, entonces tendremos la diferenciabilidad buscada, así como la derivada que queremos. Dejemos esto en pausa para enunciar y demostrar un lema auxiliar.
Un lema para acotar la norma de la derivada en un punto
Probemos el siguiente resultado.
Lema. Sea $\phi:S\subseteq \mathbb{R}^l\to \mathbb{R}^m$ un campo vectorial diferenciable en un punto $\bar{c}\in S$ y $T_\bar{c}$ su derivada. Entonces, para todo $\bar{v}\in \mathbb{R}^{l}$, se tiene:
De aquí se ve que conforme $\bar{y}\to \bar{0}$, la expresión $\frac{||\bar{v}||}{||\bar{y}||}$ está acotada superiormente por la constante $A:=\sum_{k=1}^{m}||\triangledown g_{k}(\bar{a})||.$ Además, si $\bar{y}\to \bar{0}$, entonces $\bar{v}\to \bar{0}$. Así,
Hemos concluido que $$h(\bar{a}+\bar{y})-h(\bar{a})=(F_{\bar{b}}\circ G_{\bar{a}})(\bar{y})+||\bar{y}||E_{h}(\bar{a};\bar{y}),$$
con $\lim_{\bar{y}\to \bar{0}} E_h(\bar{a};\bar{y})=0$. Esto precisamente es la definición de $h=f\circ g$ es diferenciable en $\bar{a}$, y su derivada en $\bar{a}$ es la transformación lineal dada por la composición de transformaciones lineales $F_\bar{b}\circ G_\bar{a}$.
Recapitulación de la regla de la cadena
Recapitulamos toda la discusión anterior en el siguiente teorema.
Teorema (Regla de la cadena). Sean $f:S_{f}\subseteq \mathbb{R}^{m}\rightarrow \mathbb{R}^{n}$, $g:S_{g}\subseteq \mathbb{R}^{l}\rightarrow \mathbb{R}^{m}$ campos vectoriales. Supongamos que la composición $f\circ g$ está definida en todo un abierto $S\subseteq S_g$. Supongamos que $g$ es diferenciable en un punto $\bar{a}\in S$ con derivada $G_\bar{a}$ y $f$ es diferenciable en $\bar{b}:=g(\bar{a})$ con derivada $F_\bar{b}$. Entonces, $h$ es diferenciable en $\bar{a}$ con derivada $F_\bar{b}\circ G_\bar{a}$.
Dado que la representación matricial de la composición de dos transformaciones lineales es igual al producto de estas, podemos reescribir esto en términos de las matrices jacobianas como el siguiente producto matricial: $$Dh(\bar{a})=Df(\bar{b})Dg(\bar{a}).$$
Usos de la regla de la cadena
Hagamos algunos ejemplos de uso de regla de la cadena. En el primer ejemplo que veremos a continuación, la función $f$ es un campo escalar.
Ejemplo 1. Tomemos $g:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ campo vectorial, y $f:U\subseteq \mathbb{R}^{m}\rightarrow \mathbb{R}$ campo escalar. Consideremos $h=f\circ g$ y supongamos que se satisfacen las hipótesis del teorema de la regla de la cadena. Tenemos: \[ Df(\bar{b})=\begin{pmatrix} \frac{\partial f}{\partial x_{1}}(\bar{b}) & \dots & \frac{\partial f}{\partial x_{m}}(\bar{b}) \end{pmatrix} \] y \[ Dg(\bar{a})=\begin{pmatrix}\frac{\partial g_{1}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial g_{1}}{\partial x_{n}}(\bar{a}) \\ \vdots & \ddots & \vdots \\ \frac{\partial g_{m}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial g_{m}}{\partial x_{n}}(\bar{a}) \end{pmatrix} . \]
En otras palabras, tenemos las siguientes ecuaciones para calcular cada derivada parcial de $h$: \[ \frac{\partial h}{\partial x_{j}}(\bar{a})=\sum_{i=1}^{m}\frac{\partial f}{\partial x_{i}}(\bar{b})\frac{\partial g_{i}}{\partial x_{j}}(\bar{a}).\]
$\triangle$
Ejemplo 2. Sean $\bar{a}=(s,t)$ y $\bar{b}=(x,y)$ puntos en $\mathbb{R}^{2}$. Pensemos que las entradas de $\bar{b}$ están dadas en función de las entradas de $\bar{a}$ mediante las ecuaciones $x=g_{1}(s,t)$ y $y=g_{2}(s,t)$. Pensemos que tenemos un campo escalar $f:\mathbb{R}^2\to \mathbb{R}$, y definimos $h:\mathbb{R}^2\to \mathbb{R}$ mediante $$h(s,t)=f(g_{1}(s,t),g_{2}(s,t)).$$
Por el ejemplo anterior \[ \frac{\partial h}{\partial s}=\frac{\partial f}{\partial x}\frac{\partial x}{\partial s}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial s} \] y \[ \frac{\partial h}{\partial t}=\frac{\partial f}{\partial x}\frac{\partial x}{\partial t}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial t}. \] Como tarea moral queda que reflexiones qué significa $\partial x$ cuando aparece en el «numerador» y qué significa cuando aparece en el «denominador».
$\triangle$
Ejemplo 3. Para un campo escalar $f(x,y)$ consideremos un cambio de coordenadas $x=rcos\theta$, $y=rsen\theta$ es decir tomemos la función $\phi (r,\theta)=f(rcos\theta ,rsen\theta )$.
Por el ejemplo anterior tenemos \[ \frac{\partial \phi }{\partial r}=\frac{\partial f}{\partial x}\frac{\partial x}{\partial r}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial r} \] y \[ \frac{\partial \phi }{\partial \theta }=\frac{\partial f}{\partial x}\frac{\partial x}{\partial \theta }+\frac{\partial f}{\partial y}\frac{\partial y}{\partial \theta } \] donde, haciendo las derivadas parciales tenemos: \[ \frac{\partial x}{\partial r}=cos\theta ,\hspace{1cm}\frac{\partial y}{\partial r}=sen\theta \] y \[ \frac{\partial x}{\partial \theta }=-rsen\theta,\hspace{1cm}\frac{\partial y}{\partial \theta }=-rcos\theta. \] Finalmente obtenemos: \[ \frac{\partial \phi }{\partial r }=\frac{\partial f }{\partial x }cos\theta +\frac{\partial f }{\partial y }sen\theta \] y \[ \frac{\partial \phi }{\partial \theta }=-\frac{\partial f }{\partial x }rsen\theta +\frac{\partial f }{\partial y }rcos\theta \] que son las derivadas parciales del cambio de coordenadas en el dominio de $f$.
$\triangle$
Mas adelante…
En la siguiente entrada comenzaremos a desarrollar la teoría para los importantes teoremas de la función inversa e implícita si tienes bien estudiada esta sección disfrutaras mucho de las siguientes.
Tarea moral
Considera el campo escalar $F(x,y,z)=x^{2}+y sen(z)$. Imagina que $x,y,z$ están dados por valores $u$ y $v$ mediante las condiciones $x=u+v$, $y=vu$, $z=u$. Calcula $\frac{\partial F}{\partial u}$, $\frac{\partial F}{\partial v}$.
Sea $g(x,y,z)=(xy,x)$, y $f(x,y)=(2x,xy^{2},y)$. Encuentra la matriz jacobiana del campo vectorial $g\circ f$. Encuentra también la matriz jacobiana del campo vectorial $f\circ g$.
En la demostración del lema que dimos, hay un paso que no justificamos: el primero. Convéncete de que es cierto repasando el contenido de la entrada anterior Diferenciabilidad.
Imagina que sabemos que la función $f:\mathbb{R}^n\to \mathbb{R}^n$ es invertible y derivable en $\bar{a}$ con derivada $T_\bar{a}$. Imagina que también sabemos que su inversa $f^{-1}$ es derivable en $\bar{b}=f(\bar{a})$ con derivada $S_\bar{b}$. De acuerdo a la regla de la cadena, ¿Qué podemos decir de $T_\bar{a}\circ S_\bar{b}$? En otras palabras, ¿Cómo son las matrices jacobianas entre sí, en términos de álgebra lineal?
Reflexiona en cómo todas las reglas de la cadena que hemos estudiado hasta ahora son un corolario de la regla de la cadena de esta entrada.
Después de haber abordado a modo de repaso las herramientas que usaremos de álgebra lineal, estamos listos para estudiar la diferenciabilidad en funciones más generales. Ya estudiamos la diferenciabilidad en curvas (funciones $f:S\subseteq \mathbb{R}\to \mathbb{R}^m$) y en campos escalares (funciones $f:S\subseteq \mathbb{R}^n \to \mathbb{R}$). Ahora podemos estudiar la diferenciabilidad en campos vectoriales, que recuerda que ahora sí son funciones $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^m$ para cualesquiera $m$ y $n$ enteros positivos.
Intuición de diferenciabilidad en campos vectoriales
Con anterioridad, hemos discutido la intuición geométrica de lo que quiere decir que un campo escalar $f:\mathbb{R}^n\to \mathbb{R}$ sea diferenciable. A grandes rasgos, estamos pidiendo que cerca de un punto $\bar{a}$ la función $f(\bar{a})$ cambie «como una función lineal». Esto quiere decir que la gráfica de la función se parece mucho a un hiperplano en $\mathbb{R}^{n+1}$ cerca del punto $\bar{a}$, tanto que de hecho podemos dar un hiperplano tangente a la gráfica en $\bar{a}$. Bajo suficiente regularidad, esta función lineal estaba dada por las derivadas parciales y estaba muy relacionada con el gradiente $\triangledown f$.
La situación para campos vectoriales es parecida. Si tenemos una función $f:\mathbb{R}^n\to \mathbb{R}^m$, entonces está dada por funciones coordenada que la expresan de la manera $f(\bar{x})=(f_1(\bar{x}),\ldots,f_m(\bar{x}))$ para cada $\bar{x}\in \mathbb{R}^n$. La diferenciabilidad que buscaremos ahora deberá suceder coordenada a coordenada, y por ello lo que pensaremos como derivada tendrá algo así como un gradiente por cada coordenada. Esto nos daría $m$ gradientes, pero una mejor forma de pensar en resumen a la derivada es como una transformación lineal $T:\mathbb{R}^n\to \mathbb{R}^m$ que nos diga con mucha precisión cuándo cambia la funciíon $f$ (cuando esto sea posible).
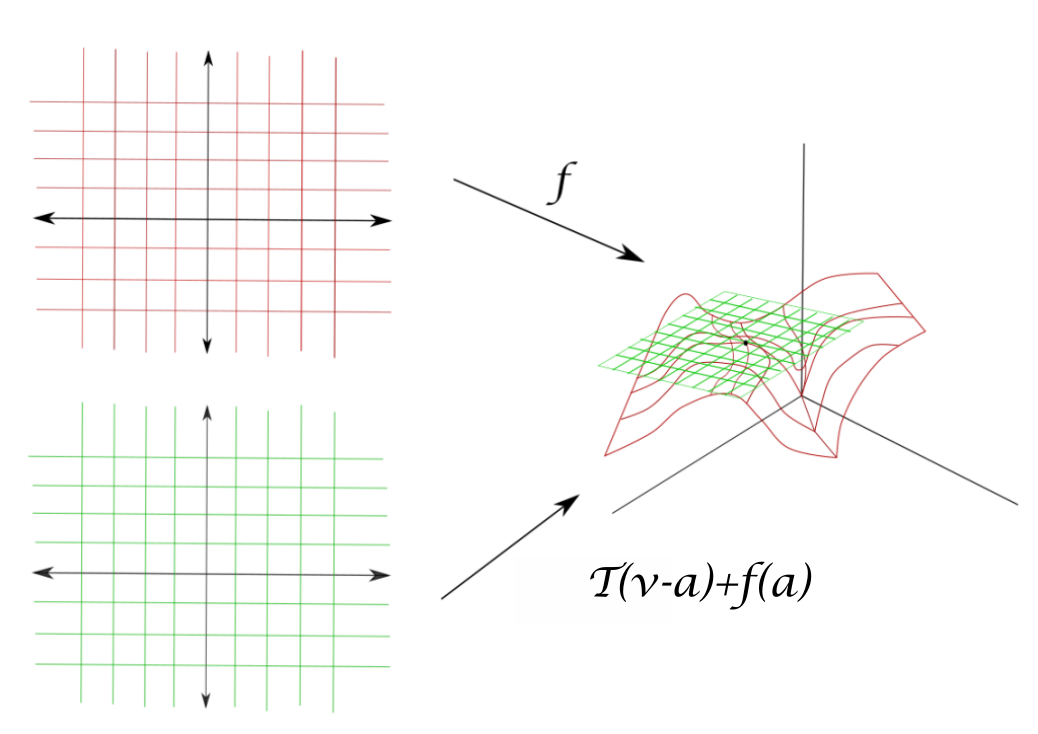
Para tener clara idea de lo que queremos hacer recordemos el ejemplo de campos escalares, y de aquí construiremos una generalización a campos vectoriales: Observa la Figura $1$. A la izquierda, hemos dibujado dos copias de $\mathbb{R}^n$ (pero que puedes pensar como $\mathbb{R}^2$). A la derecha, hemos dibujado la gráfica de dos funciones. Una es una función cualquiera $f:\mathbb{R}^{n}\rightarrow \mathbb{R}^m$. La otra es una transformación lineal $T:\mathbb{R}^{n}\rightarrow \mathbb{R}^m$ que ha sido trasladada sobre el plano $xy$ y sobre el eje $z$ con la función $G(\bar{v})=T(\bar{v}-\bar{a})+f(\bar{a})$. Estas gráficas son objetos en $\mathbb{R}^n \times \mathbb{R}^m$ (ponemos un punto por cada pareja $(\bar{x},f(\bar{x}))$ con $\bar{x}\in \mathbb{R}^n$).
Como $T$ es lineal, cumple $T(\bar{0})=0$. Al hacer la traslación, obtenemos $G(\bar{a})=T(\bar{0})+f(\bar{a})=f(\bar{a})$. Así, $T$ traslada un subespacio $H$ de dimensión $n$ a un subespacio afín de dimensión $n$ que pasa por $f(\bar{a})$. Lo que buscaremos al pedir que la función $f$ sea diferenciable con derivada $T$ es que la gráfica de $f$ se parezca mucho a este subespacio $H+f(\bar{a})$, tanto que de hecho dicho subespacio lo podremos pensar como tangente a la gráfica en el punto $(\bar{a},f(\bar{a}))$.
Figura 1
Definición de diferenciabilidad para campos vectoriales
¿Cuál es la condición algebraica que pediremos? Será muy similar a lo que pasaba en campos escalares. Lo que queremos es que el cambio $f(\bar{a}+\bar{v})-f(\bar{a})$ se parezca mucho a $T(\bar{v})$ cuando $\bar{v}$ es pequeño. De hecho, tiene que parecerse tanto, tanto, que $f(\bar{a}+\bar{v})-f(\bar{a})$ debe parecerse a $T(\bar{v})$ más rápido de lo que $\bar{v}$ se va a $\bar{0}$. Esto nos lleva a plantear que la condición buscada sea la siguiente:
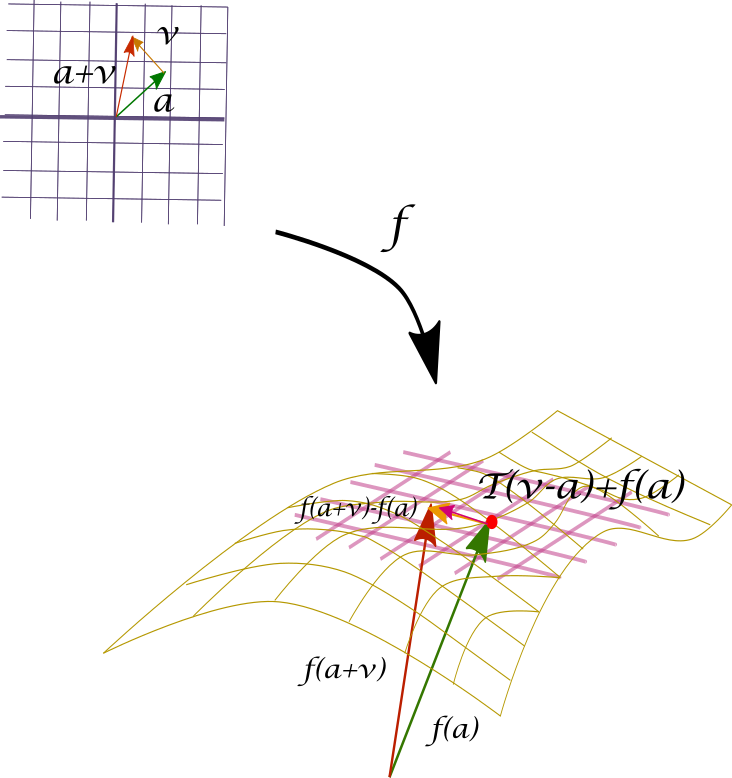
$$\lim_{\bar{v}\to \bar{0}}\frac{||(f(\bar{a}+\bar{v})-f(\bar{a}))-T(\bar{v})||}{||\bar{v}||}=0.$$ La Figura $2$ tiene un diagrama que ayuda a entender esto un poco mejor. Queremos que la flecha indicada en amarillo acabe muy cerca de $f(\bar{a}+\bar{v})$.
El vector $T(\bar{v}-\bar{a})+f(\bar{a})$ es el vector $T(\bar{v})$ transportado hasta el plano tangente el cual está en color rosa. La idea es que $f(\bar{a}+\bar{v})-f(\bar{a})$, que es el vector señalado con amarillo abajo, se aproxime mucho en el sentido señalado por el límite mencionado en el párrafo de arriba. De esta manera tenemos la mejor aproximación lineal. Esta definición se inspira en el polinomio de Tylor de grado 1 para funciones de una variable real.
Por supuesto, la discusión que hemos tenido sólo aplica para cuando estamos trabajando cerca del punto $\bar{a}$, así que más bien la transformación lineal de la que estamos hablando dependerá del punto $\bar{a}$. Todo esto nos lleva a nuestra primera definición formal de diferenciabilidad.
Definición. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ un campo vectorial. Decimos que $f$ es diferenciable en $\bar{a}\in Int(S)$ si existe una transformación lineal $T_{\bar{a}}:\mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ tal que
En este caso, a $T_{\bar{a}}$ le llamamos la derivada de $f$ en el punto $\bar{a}$.
Antes de empezar a demostrar propiedades de esta noción, nos conviene tener una versión alternativa y totalmente equivalente.
Definición. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ un campo vectorial. Decimos que $f$ es diferenciable en $\bar{a}\in Int(S)$ si existe una transformación lineal $T_{\bar{a}}:\mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ y una función $E:\mathbb{R}^n\times \mathbb{R}^n\to \mathbb{R}^m$ de manera que $$f(\bar{a}+\bar{v})=f(\bar{a})+T_{\bar{a}}(\bar{v})+||\bar{v}||E(\bar{a};\bar{v})$$ con $$\lim_{||\bar{v}||\to 0}E(\bar{a};\bar{v})=0.$$
Esta definición es equivalente a la anterior pues si despejamos tenemos: \[E(\bar{a};\bar{v})=\frac{f(\bar{a}+\bar{v})-f(\bar{a})-T_{\bar{a}}(\bar{v})}{||\bar{v}||},\] de donde se puede verificar que se cumple una definición si y sólo si se cumple la otra. Los detalles quedan como tarea moral.
Ejemplo. Consideremos la función $f(x,y)=(x^2y^2,xy)$ y tomemos el punto $a=(1,1)$. ¿Será $f$ diferenciable en $a$? Afirmamos que sí, que la función lineal $T_a(x,y)=(2x+2y, x+y)$ cumple con la definición de límite que se pide. Veamos esto en la primera versión de la definición. Tendríamos, usando $\bar{v}=(h,k)$, que
Por la desigualdad entre la media cuadrática y la media geométrica, $$\frac{|hk|}{\sqrt{h^2+k^2}}\leq \sqrt{\frac{|hk|}{2}},$$
de modo que cuando $(h,k)\to (0,0)$, la segunda coordenada del vector que nos interesa converge a cero. La primera coordenada también se puede ver que converge a cero: el primero, segundo, tercero y sexto sumandos se acotan de manera similar, pues tienen factores $h$ o $k$ adicionales. El cuarto y quinto sumando se acotan notando que $\frac{h^2+k^2}{\sqrt{h^2+k^2}}=\sqrt{h^2+k^2}$, que también converge a cero con $h$ y $k$. Los detalles quedan de tarea moral.
$\triangle$
Diferenciabilidad implica continuidad
En el caso de las funciones de una variable real teníamos claramente que diferenciabilidad implica continuidad. Como es de esperarse, lo mismo se cumple para campos vectoriales, ya que una función diferenciable es más «suave» que una continua.
Teorema. Supongamos $f:S\subseteq \mathbb{R}^n\to\mathbb{R}^m$ es un campo vectorial diferenciable en un punto $\bar{a}$ de $S$. Entonces $f$ es continuo en $\bar{a}$.
Demostración. Si $f$ es diferenciable en $\bar{a}$ entonces cumple con la ecuación \[f(\bar{a}+\bar{v})=f(\bar{a})+T_{\bar{a}}(\bar{v})+||\bar{v}||E(\bar{a};\bar{v})\] con $E(\bar{a};\bar{v})$ una función tal que $\lim_{\bar{v}\to \bar{0}} E(\bar{a}; \bar{v})=0$ (¿Por qué es válida esta última afirmación?). Por ello:
El primer sumando no depende de $\bar{v}$, así que es $f(\bar{a})$. El segundo se va a cero pues las transformaciones lineales son continuas. Finalmente, el tercer sumando se va a cero por lo que sabemos de $E(\bar{a},\bar{v})$. Así, $\lim\limits_{\bar{v}\to \bar{0}}f(\bar{a}+\bar{v})=f(\bar{a})$. Por lo tanto $f$ es continua.
$\square$.
Derivadas direccionales y derivadas parciales
Si bien tenemos dos definiciones de diferenciabilidad, aún no tenemos una manera muy práctica de encontrar o describir a la transformación lineal $T_{\bar{a}}$, que es la mejor aproximación lineal. En el ejemplo después de nuestra definición, nos dieron la transformación y funcionó, pero hasta donde hemos platicado, todavía es un misterio cómo obtenerla.
Nos gustaría tener una descripción más explícita pues queremos resolver problemas específicos como encontrar, por ejemplo, la ecuación de un hiperplano tangente. Este problema ya lo habíamos resuelto para campos escalares: si tenemos suficiente regularidad, entonces podemos construir la derivada a través de las derivadas parciales (que a su vez son derivadas direccionales). La teoría que ya desarrollamos prácticamente se puede copiar, considerando que ahora tendremos derivadas en cada función coordenada.
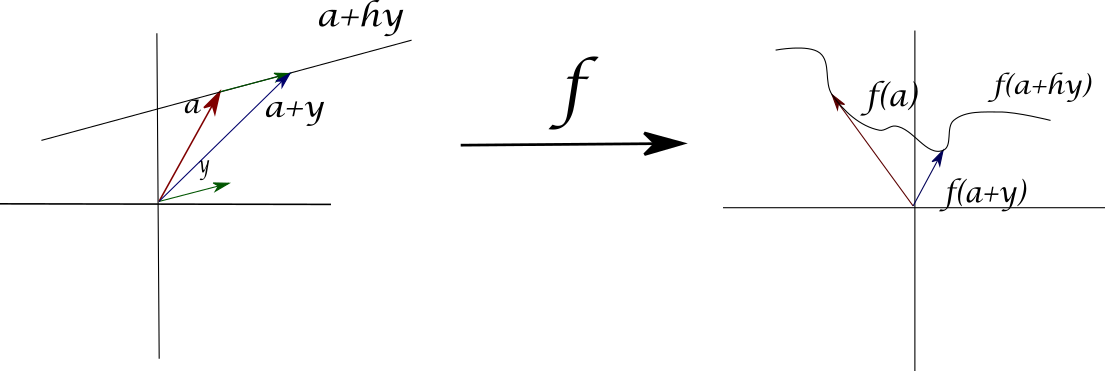
Lo primero que notaremos es que así como para campos escalares, para campos vectoriales también podemos definir la noción de derivadas direccionales. Pensemos en una función $f:S\subseteq \mathbb{R}^{n}\to \mathbb{R}^n$. Tomemos un vector fijo $\bar{a}\in Int=(S)$. Coloquemos una flecha que comience en $\bar{a}$ y tenga dirección dada por otro vector dado $\bar{y}\in \mathbb{R}^{n}$. Si multiplicamos a $\bar{y}$ por un escalar $h$ positivo, esto estira o encoge al vector $\bar{y}$, pero lo deja con la misma dirección. En el ejemplo de la Figura 3, al variar sobre todos los valores de $h$ se genera la recta $\bar{a}+h\bar{y}$. Si a los puntos de esta recta le aplicamos la función $f$, se obtiene un cierto lugar geométrico $$f(\bar{a}+h\bar{y})=(f_1(\bar{a}+h\bar{y}),\ldots,f_m(\bar{a}+h\bar{y})),$$ conforme se varían los valores de $h$. Lo que definiremos como derivada direccional nos permitirá hablar de un espacio afín tangente de dimensión $m$ a este lugar geométrico en el punto $f(\bar{a})$.
Figura 3
A continuación tenemos nuestra definición de derivada direccional para campos vectoriales.
Definición. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ un campo vectorial. Tomemos $\bar{a}\in Int(S)$, $\bar{y}\in \mathbb{R}^{n}$. Definimos la derivada direccional de $f$ en $\bar{a}$ en la dirección $\bar{y}$ como: \[ f'(\bar{a};\bar{y})=\lim\limits_{h\to 0}\frac{f(\bar{a}+h\bar{y})-f(\bar{a})}{h}, \] siempre y cuando el límite exista.
Notemos que $f'(\bar{a};\bar{y})$ es un vector de $\mathbb{R}^{m}$.
En los campos escalares teníamos derivadas parciales. En este caso también las tenemos y describen a las derivadas direccionales en el mismo sentido que en el caso escalar. Para formalizar las cosas, damos la definición a continuación.
Definición. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ un campo vectorial. Tomemos $\bar{a}\in Int(S)$, $\bar{y}\in \mathbb{R}^{n}$. Definimos la derivada direccional de $f$ en la coordenada $x_i$ en $a$ como la derivada parcial $f'(\bar{a};\hat{e}_i)$, donde $\hat{e}_i$ es el $i$-ésimo vector de la base canónica, siempre y cuando esta exista.
Como en el caso de los campos escalares, las derivadas direccionales pueden entenderse en términos de las derivadas parciales bajo suficiente regularidad. Tomemos $\hat{e}_1,\ldots,\hat{e}_n$ la base canónica de $\mathbb{R}^n$. Tomemos $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^m$. Pensemos que todas las derivadas parciales de $f$ existen en un punto dado $\bar{a}$ y que son continuas. Expresemos a $\bar{y}$ como $\bar{y}=\alpha_1\hat{e}_1+\alpha_2\hat{e}_2+\ldots+\alpha_n\hat{e}_n$ con $\hat{e}_1,\ldots,\hat{e}_n$ la base canónica de $\mathbb{R}^n$. En esta entrada discutiremos hacia el final que bajo estas condiciones tendremos que $f'(\bar{a};\bar{y})$ existe y de hecho que $$f'(\bar{a};\bar{y})=\sum_{i=1}^n \alpha_i f'(\bar{a};\bar{e}_i).$$
El tener derivadas parciales continuas resultará una hipótesis muy fuerte y de hecho implicará todavía más que la existencia de derivadas direccionales. De hecho, como en el caso de campos escalares, esta hipótesis implicará diferenciabilidad. Antes de discutir esto, veremos en la siguiente sección qué pasa componente a componente.
Si las derivadas parciales no son continuas, no deberíamos esperar que las derivadas direccionales existan: ¡hay muchas posibles direcciones y sólo sabemos que pasa en dos de ellas! Como tarea moral, puedes pensar en un contraejemplo de un campo escalar $f:\mathbb{R}^2\to \mathbb{R}^2$ con derivadas parciales en cierto punto $\bar{a}$, pero sin alguna (o algunas) derivadas direccionales en $\bar{a}$.
Derivadas por componente
Las derivadas direccionales pueden entenderse mediante las derivadas parciales, pero también, como en el caso de las trayectorias, pueden entenderse mediante las derivadas por componente. Para pensar en ello, tomemos $\hat{e}_1,\ldots,\hat{e}_m$ la base canónica de $\mathbb{R}^m$. Tomemos $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^m$ con funciones coordenadas $f(\bar{x})=\left( f_{1}(\bar{x}),\dots ,f_{m}(\bar{x})\right)$. Pensemos que las derivadas direccionales de $f_1,\ldots, f_m$ en $\bar{a}$ en la dirección $\bar{y}$ existen.
En la última igualdad estamos usando la suposición de que las derivadas existen componente a componente. Como mostramos que el límite planteado inicialmente existe, obtenemos entonces que \begin{equation} \label{eq:porcomponente} f'(\bar{a};\bar{y})=\sum_{i=1}^{m}f_{i}'(\bar{a};\bar{y}){\hat{e}_{i}} .\end{equation}
Lo que tenemos aquí es que la derivada direccional de $f$ en $\bar{a}$ en dirección de $\bar{y}$ es la suma vectorial de cada vector de la base escalado por la derivada direccional del campo escalar $f_{i}$ en $\bar{a}$ con respecto a la dirección de $\bar{y}$.
Diferenciabilidad implica derivadas direccionales
La noción de diferenciabilidad que dimos implica la diferenciabilidad de cada una de las funciones componente $f_i$ de una función $f:\mathbb{R}^n\to \mathbb{R}^m$. Es decir, si el campo vectorial es diferenciable, entonces cada uno de los campos escalares $f_1,\ldots,f_m$ componentes son también diferenciables, pues el límite $$\lim_{\bar{v}\to \bar{0}}\frac{||f(\bar{a}+\bar{v})-f(\bar{a})-T_{\bar{a}}(\bar{v})||}{||\bar{v}||}=0$$ se cumple, y por lo tanto se cumple componente a componente. En el caso de $T_{\bar{a}}$ el $i$-ésimo componente es precisamente hacer el producto interior del $i$-ésimo renglon de la matriz que representa a $T_{\bar{a}}$ con $\bar{v}$, y entonces la derivada $\triangledown f_i(\bar{a})$ del campo escalar $f_i$ está dada precisamente por dicho $i$-ésimo renglón.
A su vez, sabemos que si un campo escalar es diferenciable, entonces existen todas las derivadas parciales. Por lo que hemos platicado en unidades anteriores, si $\bar{y}\in \mathbb{R}^{n}$ se escribe en la base canónica como $\bar{y}=\sum_{j=1}^{n}y_{j}{\hat{e}_{j}}$, al aplicar $\triangledown f_i(\bar{a})$ obtenemos
Usando esta igualdad para cada $i$ y sustituyendo la ecuación \eqref{eq:porcomponente} que obtuvimos al analizar componente por componente, obtenemos entonces que
¡Pero esto se puede denotar de manera mucho más compacta mediante un producto matricial! Reflexiona un poco por qué la expresión anterior dice exactamente lo mismo que la siguiente:
Como tarea moral, tendrás que verificar que en un campo vectorial diferenciable en $\bar{a}$ se debe cumplir que $f'(\bar{a};\bar{y})=T_{\bar{a}}(\bar{y})$. Por lo discutido, debe pasar entonces para cada $y$ que \[ T_{\bar{a}}(\bar{y})=\begin{pmatrix} \frac{\partial f_{1}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial f_{1}}{\partial x_{n}}(\bar{a}) \\ \vdots & \ddots & \vdots \\ \frac{\partial f_{m}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial f_{m}}{\partial x_{n}}(\bar{a}) \end{pmatrix}\begin{pmatrix} y_{1} \\ \vdots \\ y_{n} \end{pmatrix}.\]
Esto precisamente nos está diciendo que si $f$ es diferenciable en $a$, entonces sus derivadas parciales deben existir y se debe cumplir que la forma matricial de $T_{\bar{a}}$ en las bases canónicas de $\mathbb{R}^n$ y $\mathbb{R}^m$ debe ser \begin{equation}\label{eq:jacobiana}\begin{pmatrix} \frac{\partial f_{1}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial f_{1}}{\partial x_{n}}(\bar{a}) \\ \vdots & \ddots & \vdots \\ \frac{\partial f_{m}}{\partial x_{1}}(\bar{a}) & \dots & \frac{\partial f_{m}}{\partial x_{n}}(\bar{a}) \end{pmatrix}.\end{equation}
Matriz jacobiana
Toda la discusión anterior nos lleva a lo siguiente.
Definición. Dado un campo vectorial $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$ diferenciable en un punto $\bar{a}\in Int(S)$ con derivada $T_{\bar{a}}$, a la matriz que representa a $T_{\bar{a}}$ en las bases canónicas la denotamos por $Df(\bar{a})$ y le llamamos la matriz jacobiana de $f$ en $\bar{a}$.
Escribiremos $Df(\bar{a})(\bar{x})$ para referirnos al producto de la matriz $Df(\bar{a})$ con el vector (columna) $\bar{x}$, que precisamente coincide con $T_{\bar{a}}(\bar{x})$. Así, bajo la hipótesis de diferenciabilidad, hemos recuperado entonces lo que hace $T_{\bar{a}}$ como una multiplicación matricial, donde la matriz tiene como elementos a las derivadas parciales de las funciones coordenada en el punto $\bar{a}$.
Ejemplos de diferenciabilidad en campos vectoriales
Con todo lo discutido hasta ahora, obtenemos un método para obtener la derivada para campos vectoriales, lo que nos permitirá, por ejemplo, encontrar la transformación lineal de forma explícita y encontrar hiperplanos tangentes.
Ejemplo. Consideremos $f(x,y)=(x^{2},xy,y^{2}).$ Calculemos su diferencial en el punto $(1,-1)$. Las funciones coordenada son
Ejemplo. Ahora obtengamos el plano tangente a una superficie dada en un punto dado. Sea $\mathcal{S}$ la superficie de $\mathbb{R}^{3}$ descrita por la imagen de la función $f(x,y)=(x,y,xy^{2})$. Vamos a determinar el plano tangente a dicha superficie en el punto $(1,1,1)$. Comencemos calculando $Df(1,1)$. En primer lugar calculemos las parciales: \[ \frac{\partial f_{1}}{\partial x}(1,1)=1;\hspace{3cm}\frac{\partial f_{1}}{\partial y}(1,1)=0;\hspace{3cm}\frac{\partial f_{2}}{\partial x}(1,1)=0 \] \[ \frac{\partial f_{2}}{\partial y}(1,1)=1;\hspace{3cm}\frac{\partial f_{3}}{\partial y}(1,1)=1;\hspace{3cm}\frac{\partial f_{3}}{\partial y}(1,1)=2.\]
Por lo tanto \[ Df(1,1)=\begin{pmatrix} 1 & 0 \\ 0 & 1 \\ 1 & 2 \end{pmatrix}.\]
Esta transformación manda al punto $(x,y)$ del plano $\mathbb{R}^2$ al punto\[ \begin{pmatrix} 1 & 0 \\ 0 & 1 \\ 1 & 2 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} x \\ y \\ x+2y \end{pmatrix}.\]
De modo que el plano centrado en el origen es el conjunto $$H=\{(x,y,x+2y)\in \mathbb{R}^{3}|(x,y)\in \mathbb{R}^{2}\}.$$
Pero este plano debemos todavía trasladarlo por el vector $(1,1,1)$ para que pase por el punto $f(1,1)$. Concluimos entonces que el plano tangente buscado es el conjunto
En la Figura 4 tenemos la en rojo la imagen del campo vectorial de este ejemplo y en verde la del plano tangente, el punto negro es el punto $(1,1,1)$.
Figura 4
$\triangle$
¿Y derivadas parciales implica diferenciabilidad?
Cuando un campo vectorial es diferenciable, existen todas las derivadas parciales de todos sus campos escalares coordenados. El regreso no es cierto. Sin embargo, sí se vale bajo una condición adicional de regularidad.
Definición. Diremos que un campo vectorial $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^m$ es de clase $C^1$ (o simplemente es $C^1$) en un punto $\bar{a}\in S$ si todas las derivadas parciales de todas las funciones componentes de $f$ existen y son continuas en $\bar{a}$. Definimos de manera análoga lo que significa que $f$ sea de clase $C^1$ en todo $S$.
Teorema. Si $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^m$ es un campo vectorial, $\bar{a}\in S$ y $f$ es $C^1$ en $\bar{a}$, entonces $f$ es diferenciable y su derivada $T_a$ tiene como forma matricial a la matriz jacobiana \eqref{eq:jacobiana}.
En esta entrada introdujimos el concepto de diferenciabilidad, de derivadas parciales, direccionales y por componente. Además, mostramos que cuando una función es diferenciable, entonces su derivada tiene una forma matricial muy sencilla, dada por las derivadas parciales de las componentes. Esto es nuestra primera señal de que las derivadas y las matrices están muy relacionadas entre sí. Lo que veremos en la siguiente entrada es que esta conexión se sigue dando, y de hecho nos permitirá enunciar de manera muy elegante la regla de la cadena para campos vectoriales: ¡será una multiplicación de matrices!
Después de entender mejor la diferenciabilidad, presentaremos y demostraremos teoremas clásicos e importantes de campos vectoriales: el teorema de la función inversa, y el teorema de la función implícita.
Tarea moral
Completa los detalles faltantes del primer ejemplo que dimos de diferenciabilidad.
Calcula la matriz jacobiana de la función $g(x,y,z)=(xz,xy,x^{2}y^{2}z^{2})$. Úsala para encontrar la ecuación del espacio tangente a la gráfica en el punto $g(2,1,0)$.
Halla el campo vectorial cuya imagen es el plano tangente a la superficie dada por la ecuación $F(x,y)=x^{2}y^{2}+1$ en el punto $(1,1)$. Como ayuda al graficar $F$ en $\mathbb{R}^{3}$ nos dibuja la misma superficie que obtenemos de la imagen del campo vectorial $f(x,y)=(x,y,x^{2}y^{2}+1)$ que esta contenida en $\mathbb{R}^{3}$.
Verifica que en efecto las dos definiciones de diferenciabilidad que dimos son equivalentes.
Demuestra que si las parciales de cada componente de un campo vectorial existen, y son continuas, entonces la función es diferenciable. Tendrás que seguir la sugerencia dada en la última sección. Después, justifica la igualdad que dimos que escribe a las derivadas direccionales en términos de las parciales.
Explica a detalle por qué la expresión a la que llegamos para $f^{\prime}(\bar{a};\bar{y})$ en efecto se puede pensar como el producto matricial mencionado.
Encuentra un ejemplo de campo vectorial $f:\mathbb{R}^2\to \mathbb{R}^2$ en donde las derivadas parciales existen en algún punto $\bar{a}$, pero no todas las derivadas direccionales existen.
En las entradas anteriores definimos qué quiere decir que un campo escalar sea diferenciable. Así mismo, definimos las derivadas parciales y el gradiente. Ya usamos estas herramientas para hablar de dirección de cambio máximo y de puntos críticos. Además demostramos una versión del teorema del valor medio para este caso, lo que nos permitió poner un poco de orden a nuestra teoría: una función es diferenciable en un punto cuando existen sus parciales en ese punto y son continuas. Es momento de hablar de derivadas parciales de segundo orden. Cualquiera de las derivadas parciales es por sí misma un campo escalar, así que podemos preguntarnos si tiene o no sus propias derivadas parciales. Exploraremos esta idea.
Derivadas parciales de segundo orden
Las derivadas parciales de un campo escalar $f$ nos originan nuevos campos escalares. Supongamos que $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}$ es un campo escalar para el cual existe la $k$-ésima derivada parcial en un conjunto abierto $S’\subseteq S$. Entonces, obtenemos un nuevo campo escalar $\frac{\partial f}{\partial x_{k}}:S’\rightarrow \mathbb{R}$.
Este campo escalar puede o no tener $j$-ésima derivada parcial. Suponiendo que la tiene en algún $U\subseteq S’$ podríamos escribirla como
A esto le llamamos una derivada parcial de segundo orden. Si $j=k$, introducimos la notación
\[ \frac{\partial ^{2}f }{\partial x_{k}^{2}}.\]
Las derivadas parciales de segundo orden vuelven a ser, una vez más, cada una de ellas un campo escalar. Esto permite seguir iterando la idea: podríamos hablar de derivadas parciales de segundo, tercero, cuarto, … , $k$-ésimo, … orden. Daremos una definición un poco más formal en una siguente entrada, pero por ahora trabajemos en entender a las derivadas parciales de segundo orden.
Un ejemplo de derivadas parciales de segundo orden
Ejemplo. Consideremos el campo escalar $f(x,y,z)=x^{2}yz$. Para este campo escalar tenemos que sus derivadas parciales con respecto a $x$, $y$ y $z$ son:
Cada una de estas expresiones es a su vez un campo escalar. Cada una de ellas es derivable con respecto a $x$ en todo $\mathbb{R}^3$. Al derivarlas con respecto a $x$ obtenemos:
Por otro lado, las derivadas parciales de primer orden también podríamos haberlas derivado con respecto a $y$. En este caso, hubieramos obtenido.
\begin{align*} \frac{\partial ^{2}f}{\partial y \partial x}(x,y,z)&=2xz,\\ \frac{\partial ^{2}f}{\partial y ^2}(x,y,z)&=0,\\ \frac{\partial ^{2}f}{\partial y\partial z}(x,y,z)&=x^2. \end{align*}
También podríamos derivar a las derivadas parciales de primer orden con respecto a $z$ para obtener las tres derivadas de orden dos faltantes. En total tenemos tres derivadas parciales de primer orden y nueve derivadas parciales de segundo orden.
$\triangle$
Igualdad de las derivadas parciales de segundo orden mixtas
En numerosos campos escalares de interés tenemos una propiedad muy peculiar: que los operadores «obtener la derivada parcial con respecto a $x$» y «obtener la derivada parcial con respecto a $y$» conmutan. Es decir, varias veces podemos intercambiar el orden de derivación de las parciales y obtener el mismo resultado. En el ejemplo anterior quizás hayas notado que
Esto no siempre pasa, pero hay criterios de suficiencia sencillos de verificar. Por ejemplo, basta que las parciales mixtas existan y sean continuas para que sean iguales. El siguiente teorema formaliza el resultado.
Teorema. Sea $f:S\subseteq \mathbb{R}^{2}\rightarrow \mathbb{R}$ un campo escalar tal que las derivadas parciales $\frac{\partial f}{\partial x}$, $\frac{\partial f}{\partial y}$, $\frac{\partial^{2} f}{\partial y\partial x}$, $\frac{\partial ^{2}f}{\partial x\partial y}$ existen en un conjunto abierto $U$. Si $(a,b)\in U$ es tal que $\frac{\partial^{2} f}{\partial y\partial x}$, $\frac{\partial ^{2}f}{\partial x\partial y}$ son continuas en $(a,b)$, entonces dichas derivadas mixtas de segundo orden son iguales en $(a,b)$.
Demostración. Sean $h,k\neq 0$ suficientemente chicos para que los puntos en el plano $(a,b)$, $(a,b+k)$, $(a+h,b)$, y $(a+h,b+k)$ estén en $U$.
Definamos la función $\Gamma (x)=f(x,b+k)-f(x,b)$ para $x\in [a,a+h]$ y definamos
Notemos que $\Gamma$ es una función de $\mathbb{R}$ en $\mathbb{R}$ cuya derivada es $$\Gamma'(x)=\frac{\partial f}{\partial x}(x,b+k)-\frac{\partial f}{\partial x}(x,b).$$ Así, se le puede aplicar el teorema del valor medio con extremos en $a$ y $a+h$ para concluir que existe $\xi _{1}\in [a,a+h]$ que nos permite escribir $\Delta(h,k)$ de la siguiente manera:
Ahora podemos aplicar el teorema del valor medio en la función $y\mapsto \frac{\partial f}{\partial x} (\xi _{1},y)$ con extremos $b$ y $b+k$. Esto nos permite continuar la cadena de igualdades anterior mediante un $\eta _{1}\in [b,b+k]$ que cumple
Como $(\xi _{1},\eta _{1})\in [a,a+h]\times[b,b+k]$, se tiene que $(\xi _{1},\eta _{1})\to (a,b)$ conforme $(h,k)\to \bar{0}$.
Ahora consideremos análogamente a la función $\varLambda (y)=f(a+h,y)-f(a,y)$. Mediante un procedimiento similar al que acabamos de hacer, pero aplicado a $\varLambda$ en vez de a $\Gamma$, se tiene otra forma de expresar a $\Delta(h,k)$:
En esta entrada hablamos de las derivadas parciales de segundo orden y vimos que bajo condiciones razonables podemos elegir las variables de derivación en el orden que queramos. Estas ideas son más generales, y a continuación nos llevarán a definir las derivadas parciales de cualquier orden $k$. Después, usaremos estas derivadas parciales para generalizar otro de los teoremas de cálculo unidimensional: el teorema de Taylor.
Tarea moral
Para las siguientes funciones calcula $\frac{\partial ^{2}f}{\partial x^{2}}$:
$f(x,y)=x^{2}+y^{2}cos(xy)$
$f(x,y)=e^{x}cos(y)$
$f(x,y,z)=\textup{log}(x^{2}+2y^{2}-3z^{2})$
En el teorema que afirma que las derivadas parciales mixtas son iguales usamos cuatro veces el teorema del valor medio (¿cuáles 4 son?). Asegúrate de que en verdad lo podamos usar.
Calcula $\frac{\partial ^{2}f}{\partial y^{2}}$, y $\frac{\partial ^{2}f}{\partial x\partial y}$ para las funciones del punto 1. Explica por qué no es necesario calcular de manera separada $\frac{\partial ^{2}f}{\partial y\partial x}$
Investiga de un ejemplo en el que las derivadas parciales $\frac{\partial ^{2}f}{\partial x\partial y}$ y $\frac{\partial ^{2}f}{\partial y\partial x}$ no sean iguales. Realiza las cuentas para verificar que en efecto tienen valores distintos en algún punto.
El teorema que enunciamos está muy limitado. Sólo nos habla de campos escalares de $\mathbb{R}^2$ en $\mathbb{R}$. Sin embargo, debería también funcionar si $f:\mathbb{R}^n\to \mathbb{R}$. Enuncia y demuestra un resultado similar que te permita garantizar que $$\frac{\partial^{2} f}{\partial x_i\partial x_j}=\frac{\partial ^{2}f}{\partial x_j\partial x_i}.$$
Anteriormente se revisó el concepto de continuidad, característica de la cual emanaban diversas propiedades útiles tal como el teorema del valor intermedio. En esta ocasión, daremos inicio con la séptima unidad que estará enfocada al aspecto teórico de uno de los conceptos más conocidos dentro de las matemáticas: la derivada.
El objetivo de esta entrada es entender este nuevo concepto para que posteriormente podamos analizar las propiedades y aplicaciones que posee.
Interpretación geométrica
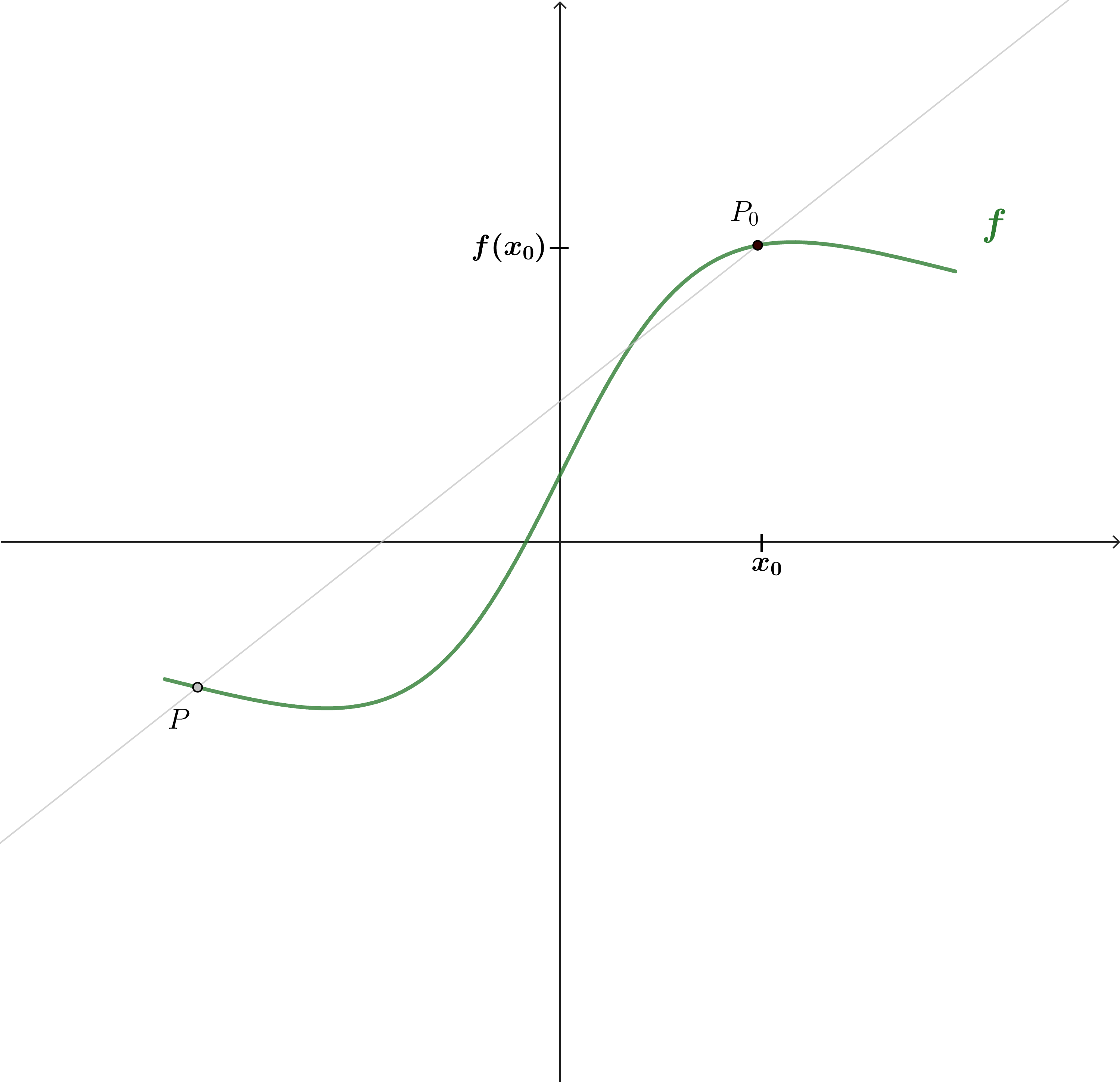
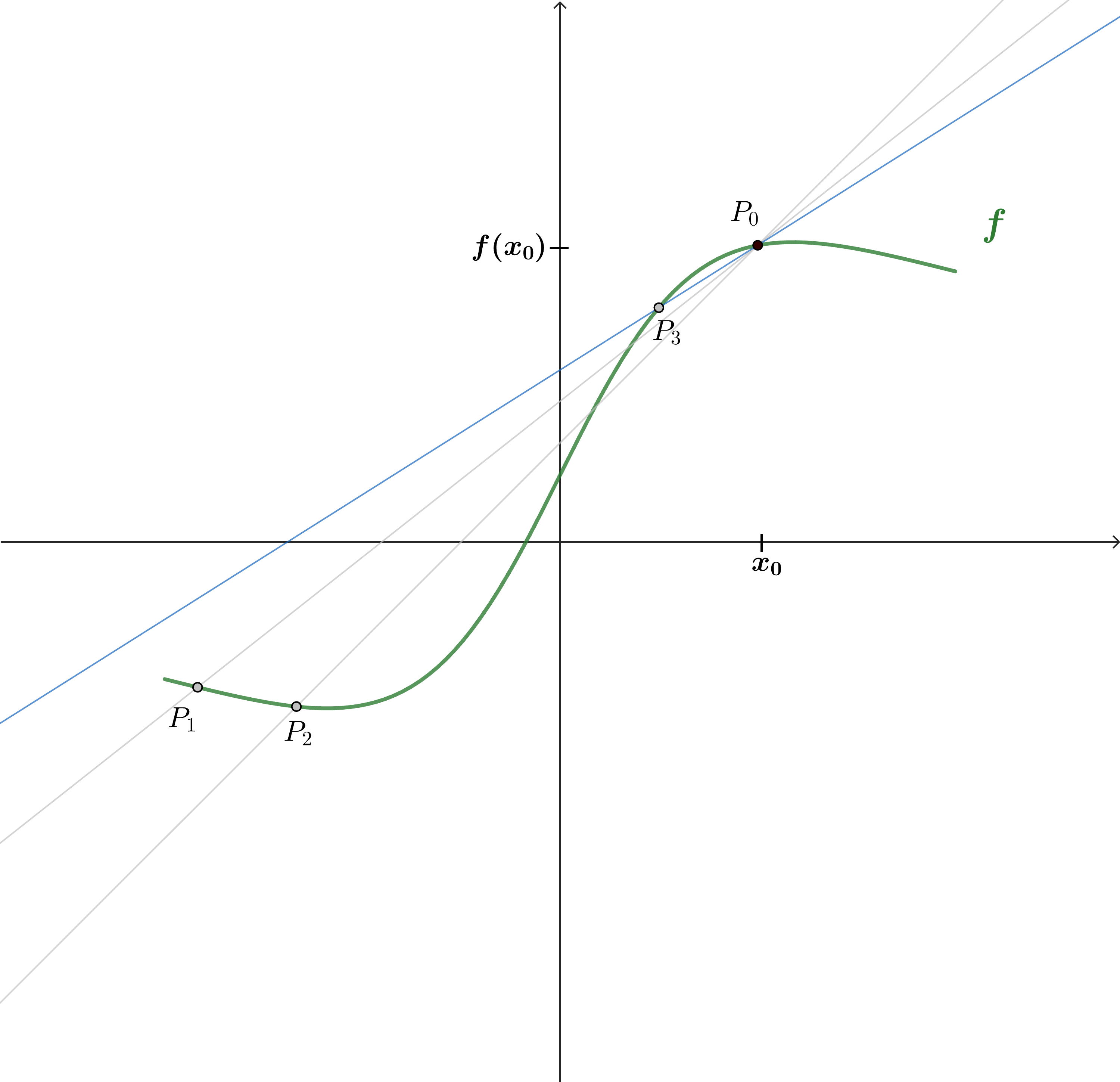
Comenzaremos estudiando la interpretación geométrica para construir la definición formal. Pensemos en la siguiente función y notemos los dos puntos marcados.
Considerando que el punto gris está dado por $P = (x, f(x))$ y el punto negro por $P_0 = (x_0, f(x_0))$, podríamos obtener fácilmente la pendiente de la recta que pasa por ambos puntos.
$$m = \frac{f(x)-f(x_0)}{x-x_0}. \tag{1}$$
¿Qué sucede si dejamos a $P_0$ como un punto fijo y «movemos» el punto $P$ de tal forma que estos puntos comienzan a estar cada vez más cerca? (En la gráfica, el «movimiento» de $P$ se plasma mediante los puntos $P_1$, $P_2$, y $P_3$)
Si tales puntos están cada vez están más cerca, el concepto de límite entra en juego, pues estaríamos buscando $P \to P_0$. Así, podríamos calcular la pendiente de la recta tangente en el punto $P_0$. De esta forma, el límite deseado es el siguiente:
$$\lim_{x \to x_0} \frac{f(x)-f(x_0)}{x-x_0}.$$
La derivada
Definición. La función $f$ es derivable en $x_0$ si el siguiente límite existe
$$\lim_{x \to x_0} \frac{f(x)-f(x_0)}{x-x_0}.$$
En este caso, denotaremos al límite anterior como $f'(x_0)$ y le llamaremos derivada de $f$ en $x_0.$
También es común encontrar la siguiente definición equivalente de la derivada.
Definición. La función $f$ es derivable en $x_0$ si el siguiente límite existe
$$\lim_{h \to 0} \frac{f(x_0+h)-f(x_0)}{h}.$$
Ahora que conocemos la definición de derivada, es momento de ponerla en práctica y revisar algunas funciones que sean derivables.
Ejemplo 1. Prueba que la función $f(x) = c$, con $c \in \RR$, es derivable para cualquier $x_0 \in \mathbb{R}.$
Demostración
Sea $x_0 \in \RR$. Veremos que $$\lim_{x \to x_0} \frac{f(x)-f(x_0)}{x-x_0}$$ sí existe.
Por lo tanto, $f$ es derivable para cualquier $x > 0$ y $f'(x) = \frac{1}{2 \sqrt{x}}$.
$\square$
Es momento de revisar una función que no sea derivable. Para este propósito, emplearemos la función valor absoluto, la cual hemos revisado anteriormente y será conveniente que tengas presente su gráfica, pues este tipo de funciones que generan un «pico» en su gráfica, no son derivables en tal punto.
Ejemplo 5. Sea $f: \RR \to \RR$, $f(x) = |x|$. Prueba que $f$ no es derivable en $x_0 = 0.$
De lo que se concluye que el límite $$\lim_{x \to x_0} \frac{|x|-0}{x-0}$$ no existe.
Por tanto, $f$ no es derivable en $x_0= 0$.
$\square$
Intuitivamente, podemos notar que si tratáramos de encontrar una «recta tangente» en $x_0 = 0$ moviéndonos por la derecha, será distinta a la «recta tangente» a generada por la izquierda. Esto hace que el límite no exista, sin embargo, podemos ser menos restrictivos en la definición.
Derivadas laterales
De forma complementaria, podemos definir la derivada en términos de la forma en que $x \to x_0$, es decir, a través de los límites laterales. Así, tenemos las siguientes definiciones.
Definición.
La función $f$ es derivable por la derecha en $x_0$ si el siguiente límite existe
$$\lim_{x \to x_0^+} \frac{f(x)-f(x_0)}{x-x_0}.$$
En este caso, denotaremos al límite anterior como $f'(x_0^+)$ y le llamaremos derivada por la derecha de $f$ en $x_0$.
La función $f$ es derivable por la izquierda en $x_0$ si el siguiente límite existe
$$\lim_{x \to x_0^-} \frac{f(x)-f(x_0)}{x-x_0}.$$
En este caso, denotaremos al límite anterior como $f'(x_0^-)$ y le llamaremos derivada por la derecha de $f$ en $x_0$.
Más adelante…
En la siguiente entrada revisaremos la relación existente entre la derivabilidad y la continuidad. Además, revisaremos algunas propiedades que nos permitirán obtener la derivada de una función con mayor facilidad.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Da un ejemplo de función que no sea derivable en un punto $x_0$.
Prueba que la función $f: \RR \to \RR$ definida por $f(x) = ax^2+bx+c$ es derivable en todo $\RR$.
Prueba que la función $f: \RR \to \RR$ definida por $f(x) = x^3-8$ es derivable en todo $\RR$.
Demuestra que $f(x) = |x|$ es derivable para todo $x \neq 0$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Al inicio de esta unidad, hablamos de las propiedades algebraicas de $\mathbb{R}[x]$, definimos sus operaciones y argumentamos por qué se puede usar la notación de potencias. Luego hablamos de las propiedades aritméticas de los polinomios cuando hablamos de divisibilidad, máximo común divisor y factorización en irreducibles. Vimos una aplicación de esto a la solución de desigualdades. Lo que queremos hacer ahora es pensar a los polinomios como funciones de $\mathbb{R}$ en $\mathbb{R}$ y entender las propiedades analíticas que tienen, es decir en términos de cálculo. Nos interesa saber qué les sucede cuando su entrada es grande, la continuidad y la diferenciabilidad de polinomios.
Estas propiedades tienen consecuencias algebraicas importantes. La continuidad de polinomios nos permite encontrar raíces reales en ciertos intervalos. La diferenciabilidad de polinomios nos ayuda a encontrar la multiplicidad de las raíces. Supondremos que manejas conocimientos básicos de cálculo y de manipulación de límites, pero de cualquier forma recordaremos algunas definiciones y daremos esbozos de la demostración de algunos resultados.
Límites a reales y límites a infinito
Recordemos dos definiciones de cálculo, que se aplican para funciones arbitrarias definidas en todos los reales.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función y $a, b$ reales. Decimos que $$\lim_{x\to a} f(x) = b$$ si para todo $\epsilon >0$ existe un $\delta > 0 $ tal que cuando $0<|x-a|<\delta$, entonces $|f(x)-b|<\epsilon$. En palabras, decimos que el límite de $f$ cuando $x$ tiende a $a$ es $b$.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función. Decimos que $$\lim_{x\to \infty} f(x) = \infty$$ si para todo $M>0$ existe un $r > 0 $ tal que cuando $x>r$, entonces $f(x)>M$. En palabras, decimos que el límite de $f$ cuando $x$ tiende a infinito es infinito.
De manera análoga se pueden definir límites cuando $x$ tiende a menos infinito, y definir qué quiere decir que el límite sea menos infinito. La siguiente proposición se prueba en textos de cálculo.
Proposición (propiedades de límites). Sean $f:\mathbb{R}\to \mathbb{R}$ y $g:\mathbb{R}\to \mathbb{R}$ funciones y $a$, $b$, $c$ reales. Si $$\lim_{x\to a} f(x) = b \quad \text { y } \quad \lim_{x\to a} g(x)= c,$$ entonces:
«El límite de la suma es la suma de los límites», en símbolos, $$\lim_{x\to a} (f+g)(x) = b+c.$$
«El límite del producto es el producto de los límites», en símbolos, $$\lim_{x\to a} (fg)(x)=bc.$$
La proposición anterior es sólo para cuando los límites son reales. Hay resultados para cuando algunos de los límites son infinitos, pero en general hay que tener cuidado.
La primer propiedad analítica de los polinomios es saber cómo es su comportamiento cuando $x$ se hace infinito o menos infinito. Si el polinomio es constante, entonces este límite es simplemente su valor en cualquier punto. Para polinomios de grado mayor o igual a $1$, su comportamiento queda resumido en la siguiente proposición.
Proposición (límites a infinito). Tomemos al polinomio $p(x)$ en $\mathbb{R}[x]$ dado por $$p(x)=a_0+a_1x+a_2x^2+\ldots+a_nx^n,$$ en donde $n\geq 1$ y $a_n\neq 0$.
Si $a_n>0$ y $p(x)$ es de grado par entonces $$\lim_{x\to \infty} p(x) = \lim_{x\to-\infty} p(x)= \infty,$$
Cuando $a_n>0$ y $p(x)$ es de grado impar entonces $$\lim_{x\to \infty} p(x) = \infty \quad \text { y } \quad \lim_{x\to -\infty} p(x)=-\infty$$
Si $a_n<0$ y $p(x)$ es de grado par entonces $$\lim_{x\to \infty} p(x) = \lim_{x\to-\infty} p(x)= -\infty,$$
Cuando $a_n<0$ y $p(x)$ es de grado impar entonces $$\lim_{x\to \infty} p(x) = -\infty \quad \text { y } \quad \lim_{x\to -\infty} p(x)=\infty.$$
Demostración. Vamos a hacer una de las demostraciones. Mostraremos que para cuando $a_n>0$ y el grado es par, entonces $$\lim_{x\to \infty} p(x) = \infty.$$ Las demás se siguen haciendo cambios de signo cuidadosos y usando que una potencia impar de un real negativo es un real negativo, y una potencia par es siempre un real positivo. Pensar en estas demostraciones queda como tarea moral.
Tomemos entonces $p(x)$ un polinomio de grado par y con coeficiente principal $a_n>0$. Intuitivamente, tenemos que mostrar que si $x$ es muy grande, entonces $p(x)$ es tan grande como queramos. Tomemos un real $M>0$. Como haremos $x$ grande, podemos suponer que $x>1$.
Como el término $a_nx^n$ es positivo, basta mostrar como resultado auxiliar que si $x$ es suficentemente grande, entonces $$a_nx^n >M+|a_0+a_1x+\ldots+a_{n-1}x^{n-1}|,$$ ya que si esto sucede, tendríamos que: \begin{align*} a_nx^n&>M+|a_0+a_1x+\ldots+a_{n-1}x^{n-1}|\\ &=M+|-a_0-a_1x-\ldots-a_{n-1}x^{n-1}|\\ &>M-a_0-a_1x-\ldots-a_{n-1}x^{n-1}, \end{align*}
y de aquí, pasando todo excepto a $M$ a la izquierda, tendríamos $p(x)>M$.
Para probar el resultado auxiliar, tomemos $A$ como el máximo de los valores absolutos $|a_0|,\ldots,|a_{n-1}|$. Por la desigualdad del triángulo y usando $x>1$ tenemos que
De esta forma, para mostrar nuestra desigualdad auxiliar basta mostrar que para $x$ suficientemente grande, tenemos que $(M+nA)x^{n-1}<a_nx^n$. Pero como $x>0$, esta desigualdad es equivalente a $x>\frac{M+nA}{a_n}$.
Recapitulando, para cualquier $M>0$, si $x>\frac{M+nA}{a_n}$, entonces $p(x)>M$. Esto termina la demostración.
$\square$
Podemos usar la proposición anterior para comparar polinomios cuando su variable tiende a infinito.
Ejemplo. Mostraremos que existe una $M$ suficientemente grande tal que si $x>M$, entonces $$\frac{1}{2}x^7-x^6-x-1>x^6+1000x^5+1000000.$$ Pasando todo del lado izquierdo, nos queda la desigualdad equivalente $$\frac{1}{2}x^7-2x^6-1000x^5-x-999999>0.$$ Aquí tenemos un polinomio $p(x)$ de grado impar y coeficiente principal positivo. Por la proposición anterior, $\lim_{x\to \infty} p(x) = \infty$, de modo que la $M$ que estamos buscando existe.
$\triangle$
Continuidad de polinomios
Antes de llegar a diferenciabilidad de polinomios, haremos un paso intermedio. Recordemos otra definición de cálculo.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función y $a$ un real. Decimos que $f$ es continua en $a$ si $$\lim_{x\to a} f(x) = f(a).$$ Decimos que $f$ es continua si es continua en todo real.
Por la proposición de propiedades de límites, la suma o producto de funciones continuas es continua. Las funciones constantes son continuas. La función identidad $I:\mathbb{R}\to \mathbb{R}$ dada por $I(x)=x$ es continua. Estos tres hechos nos ayudan a demostrar que todos los polinomios son funciones continuas sin tener que recurrir a la definición de límite.
Teorema. Cualquier polinomio $p(x)$ en $\mathbb{R}[x]$ pensado como una función $p:\mathbb{R}\to \mathbb{R}$ es una función continua.
Demostración. Supongamos que $p(x)$ está dado por $$p(x)=a_0+a_1x+\ldots+a_nx^n.$$
Para toda $i$ de $0$ a $n$ tenemos que la función $x\mapsto a_i$ es constante y por lo tanto es continua. Si $i>0$, la función $x\mapsto x^i$ es producto de $i$ veces la identidad consigo misma. Como la identidad es continua y producto de continuas es continua, entonces $x\mapsto x^i$ es continua.
De nuevo, usando que producto de funciones continuas es continua, tenemos que $x\mapsto a_ix^i$ es una función continua. De esta forma, $p(x)$ es la suma de $n+1$ funciones continuas, y por lo tanto es una función continua.
$\square$
El resultado anterior nos ayuda a usar teoremas versátiles de cálculo en nuestro estudio de polinomios. Recordemos el teorema del valor intermedio.
Teorema (del valor intermedio). Sea $f:\mathbb{R}\to \mathbb{R}$ una función continua. Sean $a<b$ dos reales. Entonces entre $a$ y $b$, la función $f$ toma todos los valores entre $f(a)$ y $f(b)$.
Veamos cómo el teorema del valor intermedio nos permite encontrar raíces de polinomios.
Problema 1. Muestra que el polinomio $p(x)=x^7-5x^5+x^2+3$ tiene por lo menos una raíz en el intervalo $[0,2]$.
Solución. Al evaluar al polinomio en cero, obtenemos $p(0)=3$. Al evaluarlo en $2$, obtenemos \begin{align*} p(2)&=2^7-5\cdot 2^5+x^2 + 3\\ &=128-160+4+3\\ &=-25. \end{align*}
Como los polinomios son funciones continuas, podemos aplicar el teorema del valor intermedio. Concluimos que $p(x)$ toma todos los valores de $-25$ a $2$ en el intervalo $[0,2]$. En particular, existe un real $r$ en $[0,2]$ tal que $p(r)=0$.
$\triangle$
El teorema del valor intermedio nos ayuda a demostrar que un polinomio tiene una raíz en cierto intervalo. Sin embargo, no es de tanta utilidad para decir exactamente cuál es esa raíz. Es un resultado existencial en vez de ser constructivo. Veamos un ejemplo más, que muestra una proposición que quedó pendiente en una entrada anterior.
Problema 2. Sea $p(x)$ un polinomio cuadrático, mónico e irreducible en $\mathbb{R}[x]$. Muestra que $p(r)>0$ para todo real $r$.
Solución. Procedamos por contradicción. Supongamos que $p(r)\leq 0$ para algún real $r$.
Como $p(x)$ es mónico, su coeficiente principal es $1$, que es positivo. Como $p(x)$ es cuadrático, es de grado par. Por la proposición de límites a infinito, existe un real $t>r$ tal que $p(t)>0$. Por el teorema del valor intermedio, existiría un real $s$ en el intervalo $[r,t]$ tal que $p(s)=0$. Pero esto es imposible, pues entonces por el teorema del factor $x-s$ divide a $p(x)$ y esto contradice que $p(x)$ es irreducible.
$\triangle$
Como muestra el problema anterior, se pueden combinar los límites de polinomios a infinito y menos infinito, y sus propiedades de continuidad. Otra aplicación es mostrar que todo polinomio de grado impar tiene por lo menos una raíz real. Esto se verá en otra entrada.
Por supuesto, otros resultados de continuidad también se pueden usar en todos los polinomios, como el teorema del valor extremo. Aplicándolo directamente, concluimos lo siguiente.
Proposición. Sean $a<b$ reales y $p(x)$ un polinomio en $\mathbb{R}$. Entonces $p(x)$ está acotado en el intervalo $[a,b]$ y existen reales $r$ y $s$ en dicho intervalo tales que $p(r)$ y $p(s)$ son el mínimo y máximo de $p(x)$ en $[a,b]$, respectivamente.
Diferenciabilidad de polinomios
Es momento de hablar de diferenciabilidad de polinomios. Recordemos una última definición de cálculo.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función. Decimos que $f$ es diferenciable en $a$ si el límite $$\lim_{h\to 0} \frac{f(a+h)-f(a)}{h}$$ existe. En este caso, a ese límite lo denotamos por $f'(a)$. Una función es diferenciable si es diferenciable en todo real. A la función $f’:\mathbb{R}\to \mathbb{R}$ le llamamos la derivada de $f$.
Al igual que en el caso de continuidad, la suma y producto de funciones diferenciales es diferenciable. Si $f:\mathbb{R}\to \mathbb{R}$ y $g:\mathbb{R}\to \mathbb{R}$ son diferenciables, entonces la derivada de $f+g$ está dada por $$(f+g)'(x)=f'(x)+g'(x)$$ y la derivada de $fg$ está dada por la regla de la cadena $$(fg)'(x)=f'(x)g(x)+f(x)g'(x).$$
Las funciones constantes son diferenciables, y su derivada es la función constante $0$. La función identidad es diferenciable, y su derivada es la función constante $1$. Esto es sencillo de mostrar y queda como tarea moral.
Proposición. Sea $n\geq 1$ un entero. El polinomio $p(x)=x^n$ es diferenciable, y su derivada es la función $p'(x)=nx^{n-1}$.
Demostración. Haremos la prueba por inducción. Si $n=1$, el polinomio es $p(x)=x$, y su derivada es $p'(x)=1=1\cdot x^0$, como queremos. Supongamos que el resultado es cierto para el entero $n\geq 1$ y tomemos $p(x)=x^{n+1}=x^n\cdot x$. Por hipótesis inductiva, $x\mapsto x^n$ es diferenciable. Como $p(x)$ es producto de dos funciones diferenciables, entonces es diferenciable.
Usando la regla de la cadena, la hipótesis inductiva de la fórmula y la derivada de $x\mapsto x$, tenemos que $$p'(x)=(nx^{n-1})(x)+(x^n)(1)=(n+1)x^n.$$ Esto termina la demostración.
$\square$
Con todos estos ingredientes podemos mostrar la diferenciabilidad de todos los polinomios. Los detalles quedan como tarea moral.
Teorema (diferenciabilidad de polinomios). Sea $p(x)$ un polinomio en $\mathbb{R}[x]$ dado por $$p(x)=a_0+a_1x+\ldots+a_nx^n,$$ Entonces $p(x)$ pensado como función es diferenciable y su derivada es un polinomio. Si $p(x)$ es constante, su derivada es el polinomio $0$. En otro caso, su derivada es el polinomio $$a_1+2a_2x+3a_3x^2+\ldots+na_nx^{n-1}.$$
Ejemplo. El polinomio $x^7+3x^2-1$ es diferenciable. Su derivada es el polinomio $7x^6+6x$.
$\triangle$
Ya que sabemos que los polinomios son diferenciables, podemos usar todas las herramientas de cálculo diferencial, como:
No profundizaremos en esto, pues es el contenido de un buen curso de cálculo, o bien de material de algún texto en el área, como el libro de Cálculo de Spivak.
A nosotros nos interesa una consecuencia algebraica de que los polinomios tengan derivada. Como la derivada de un polinomio es otro polinomio, entonces la derivada es diferenciable. Por ello, un polinomio $p(x)$ se puede derivar iteradamente tantas veces como se quiera. Al polinomio obtenido de derivar $n$ veces le llamamos la $n$-ésima derivada y lo denotamos por $p^{(n)}(x)$. En la siguiente entrada veremos cómo la repetida diferenciabilidad de polinomios nos ayuda a detectar la multiplicidad de sus raíces.
Más adelante…
En la siguiente sección nos encargaremos de realizar varios problemas para repasar las definiciones y propiedades que acabamos de enunciar, y posteriormente ocuparemos todo lo aprendido para explotar el conocimiento que tenemos de los polinomios.
En particular, nos será útil el concepto de diferenciabilidad pues con este podemos dar una definición precisa de lo que significa que la raíz de un polinomio sea múltiple.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Estudia el resto de los casos de la proposición de límites de polinomios cuando la entrada va a menos infinito y a infinito.
Muestra usando la definición de límite que las funciones constantes y la función identidad son continuas.
Demuestra por definición que las funciones constantes son diferenciables y que su derivada es la función constante $0$. Demuestra por definición que la función identidad es diferenciable y que su derivada es la función constante $1$.
Muestra que existe un real $x$ en el cual los polinomios $p(x)=x^5+x^3+x$ y $q(x)=100x^4+10x^2$ son iguales. Sugerencia. Reescribe esta igualdad en términos de encontrar una raíz de un sólo polinomio.
Completa los detalles del teorema de diferenciabilidad de polinomios.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»