Anteriormente vimos que los eventos pueden verse como subconjuntos del espacio muestral , sin embargo, no necesariamente todos los subconjuntos del espacio muestral son eventos. En este video se analizaran varias definiciones que nos permitirán formalizar ideas que hasta el momento son muy vagas, entre estas las condiciones que se deben cumplir para poder hablar de un evento, una medida de probabilidad, un espacio de probabilidad y algunas propiedades elementales.
Axiomas de la probabilidad y propiedades
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE 104721: “Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM”. Sitio web del proyecto: https://www.matematicasadistancia.com.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Si $P(A)$ es la probabilidad de que un evento A ocurra, prueba que para $A_1,A_2,\ldots, A_n$ eventos, se cumple que: $\begin{multline*}P\left(\bigcup_{i=1}^{n}A_i\right)=\sum_{i=1}^{n}P\left(A_i\right)- \sum_{i<j\le n}P\left(A_i\bigcap A_j\right)+\\ \sum_{i<j<k\le n }P\left(A_i\bigcap A_j\bigcap A_k\right)+\ldots+\left(-1\right)^{n+1}P(A_1\bigcap A_2\bigcap\ldots\bigcap A_n)\end{multline*}$.
Muestra que $P\left(\bigcup_{i=1}^{n}A_i\right)\le\sum_{i=1}^{n}P\left(A_i\right)$.
Sean $A_r,\ \ r\geq1$, eventos tales que $P\left(A_r\right)=1$ para toda $r$. Prueba que $P\left(\bigcap_{r=1}^{\infty}A_r\right)=1$.
Prueba que $P\left(\bigcap_{i=1}^{\infty}A_i\right)\geq\ \sum_{i=1}^{n}P\left(A_i\right)-(n-1)$.
Prueba que $P\left(A\cap B\right)-P\left(A\right)P\left(B\right)=P\left(\left(A\cup B\right)^c\right)-P\left(A^c\right)P\left(B^c\right)$.
Más adelante…
Cuando nos interesa la probabilidad de un evento asociado a un experimento aleatorio, en ocasiones es necesario encontrar dicha probabilidad, dada la condición suplementaria de que ha ocurrido algún otro evento asociado al experimento aleatorio. Llamaremos a tales probabilidades condicionales, hablaremos más de estas en el siguiente video.
En la entrada pasada concluimos el estudio de algunas propiedades básicas de una medida de probabilidad. A partir de estas propiedades serás capaz de demostrar muchísimas otras más, que probablemente te encontrarás en tareas, exámenes o en las secciones de ejercicios de tus libros. Por el momento, sigamos con el contenido del curso.
Lo que sigue en el curso es ver tres enfoques de la probabilidad: la probabilidad geométrica, el enfoque frecuentista, y la definición clásica de la probabilidad. Así pues, en esta entrada veremos lo que corresponde a la probabilidad geométrica. Algunos aspectos para tratar con total formalidad este tema son más avanzados. Por ello, veremos este tema «por encima», omitiendo algunas formalidades.
Hay una sección en esta entrada cuyo título lleva un asterisco (*). Cuando las leas, no te preocupes si no entiendes las formalidades, lo importante es que entiendas los resultados.
Motivación de la probabilidad geométrica
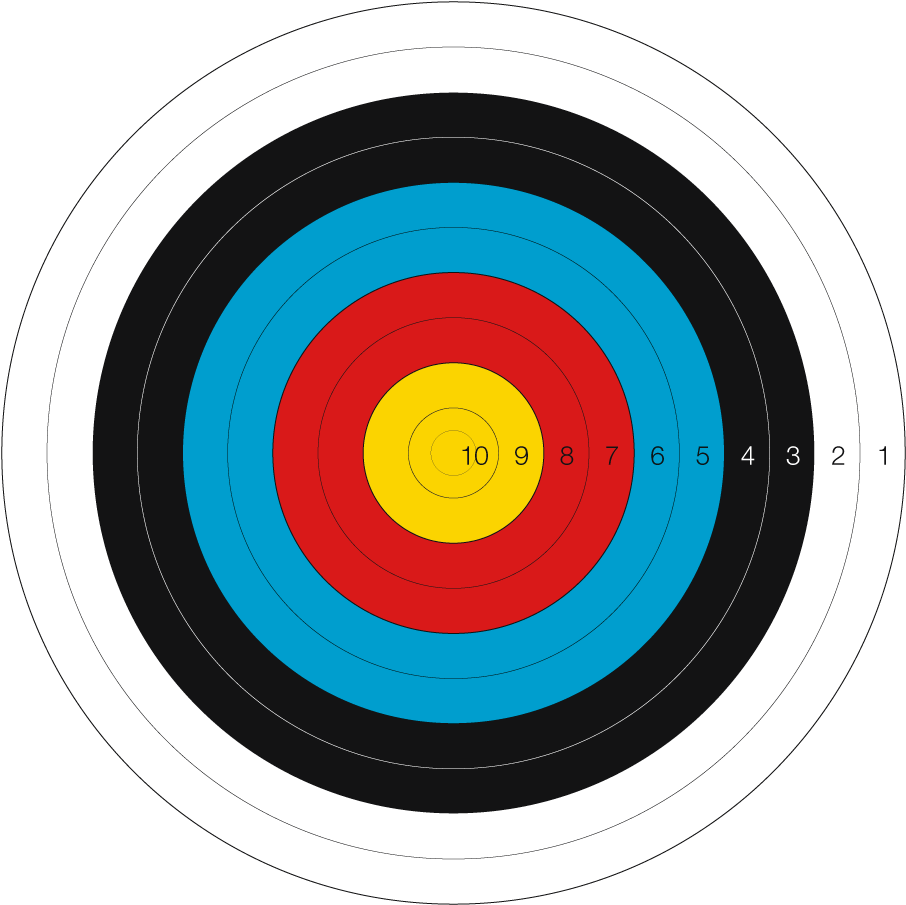
Seguramente te ha tocado jugar o espectar algún juego de lanzar cosas. Por ejemplo, el lanzamiento de dardos, o el tiro con arco. La puntuación que obtienes en un juego de este tipo se basa en tu precisión. Es decir, tú arrojas o disparas un objeto hacia una superficie, y obtienes puntos basado en la región de esa superficie a la que le atinaste. Como ejemplo, está la diana de un juego de tiro con arco:
Figura. Diana del juego de tiro con arco. La puntuación que otorga cada región de la diana está indicada por un número dentro de dicha región.
Evidentemente, cuando estás jugando a los dardos o al tiro con arco, usas tu habilidad para intentar juntar la mayor puntuación posible. Sin embargo, podemos volverlo un tema probabilista. ¿Qué pasa si decidimos arrojar un dardo, o disparar una flecha al azar? En otras palabras, que dentro de la superficie dada, escojamos un punto al azar. ¿Cómo determinamos la probabilidad de que el punto elegido caiga dentro de una región dada?
Un primer modelo para acercarnos a este problema es trabajar en $\RR^{2}$, el plano euclidiano. Luego, tomar una región acotada de $\RR^{2}$, digamos, $\Omega$. Además, supondremos que el punto se elige de manera «uniforme» sobre la región $\Omega$. Es decir, que la probabilidad de cualquier subconjunto de $\Omega$ es proporcional a su «área». Por ejemplo, para modelar una diana, podemos tomar a $\Omega$ como un círculo.
Un poco sobre la medida y el σ-álgebra que se utiliza*
Por motivos de tiempo y prerrequisitos, no es posible tratar con mucho detalle la medida ni el σ-álgebra que usaríamos en $\RR^{2}$. Por ello, recomendamos que de esta sección extraigas las ideas y resultados, y que no hagas un esfuerzo excesivo por entender la formalidad. Lo que haremos es partir de los rectángulos en $2$ dimensiones, pues es fácil definir su área.
Definición. Un rectángulo bidimensional cerrado es un subconjunto $R \subseteq \RR^{2}$ de la forma
\[ R = [a_{1}, b_{1}] \times [a_{2}, b_{2}], \]
donde $a_{1}$, $b_{1}$, $a_{2}$ y $b_{2} \in \RR$. En consecuencia, el área de $R$ es
\[ \mu(R) = (b_{1} − a_{1})(b_{2} − a_{2}). \]
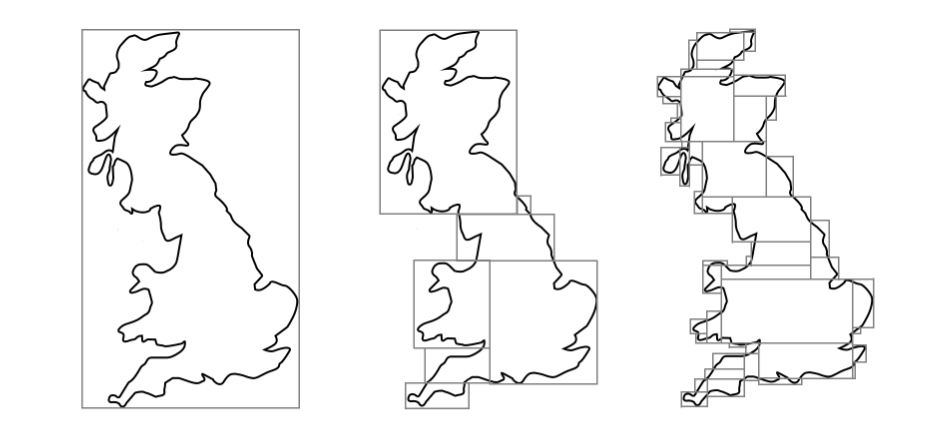
Consideraremos a $\emptyset$ como un rectángulo con $\mu(\emptyset) = 0$. Denotaremos al conjunto de todos los rectángulos bidimensionales cerrados por $\mathscr{R}(\RR^{2})$. Veremos muy por encima la manera en que se construye matemáticamente la noción de «área». Lo que haremos será aproximar el área de cualquier subconjunto $E$ de $\RR^{2}$ por afuera, a través del área de familias de rectángulos que contengan a $E$.
Definición. La medida exterior de Lebesgue $\mu^{*}(E)$ de un subconjunto $E \subseteq \RR^{2}$, es
donde el ínfimo se toma sobre las familias numerables de rectángulos cuya unión contiene a $E$. La función $\mu^{*}\colon \mathscr{P}(\RR^{2} \longrightarrow [0, \infty]$ es llamada la medida exterior de Lebesgue.
Varios conceptos en la teoría de la medida reciben su nombre en honor a Henri Lebesgue, un importantísimo matemático francés que desarrolló toda una teoría de integración de funciones.
En la definición anterior, se admite que $\mu^{*}(E)$ valga $\infty$. Esto es algo que no nos preocupará mucho en la probabilidad geométrica, pero es importante tenerlo en cuenta. Así, la función $\mu^{*}$ nos da el área de cualquier región «agradable» de $\RR^{n}$, y la obtiene aproximando por afuera con rectángulos.
Figura. Representación visual de lo que hace $\mu^{*}$. Al ser el ínfimo, nos interesa la aproximación del área de la región más refinada posible a partir de rectángulos. Haz click aquí para ir a la fuente original de esta imagen.
Ahora, lo que nos interesa es conseguir un σ-álgebra sobre la que la medida exterior de Lebesgue sea, efectivamente, una medida. La siguiente es la definición de Carathéodory (pues fue formulada por el matemático griego Constantin Carathéodory) de medibilidad. Esto es, los conjuntos que satisfacen este criterio son a los que se les podrá medir su «área».
Definición. Un subconjunto $A \subseteq \RR^{2}$ es Lebesgue-medible si para cualquier subconjunto $E \subseteq \RR^{2}$ se cumple que
Denotaremos al conjunto de todos los conjuntos Lebesgue-medibles en $\RR^{2}$ por $\mathcal{L}(\RR^{2})$. Esta condición puede interpretarse como que un conjunto es medible si divide a otros conjuntos de «buena» manera. Resulta que $\mathcal{L}(\RR^{2})$ es un σ-álgebra. Además, también se tiene que $\mu^{*}$ restringida a $\mathcal{L}(\RR^{2})$ es una medida (no de probabilidad, simplemente medida. Es lo mismo pero sin pedir que la medida de $\RR^{2}$ sea $1$). Así, se llega a la siguiente definición.
Definición. La función $\lambda\colon \mathcal{L}(\RR^{2}) \longrightarrow [0, \infty]$ definida como
la restricción de $\mu^{*}$ a $\mathcal{L}(\RR^{2})$, es llamada la medida bidimensional de Lebesgue en $\RR^{2}$.
La medida de Lebesgue asigna a cada región $E \subseteq \mathcal{L}(\RR^{2})$ (las cuales son regiones «bonitas», a las que se les puede asignar un área, en el sentido de la definición de Lebesgue-medible) el valor $\lambda(E)$, que corresponde a su área.
Definición de la probabilidad geométrica
Así, si ahora tomamos alguna región de $\RR^{2}$ para la cual su área está bien definida, podemos construir una medida de probabilidad en la que la probabilidad de cada sub-región es proporcional a su área. Si $\Omega$ es un subconjunto acotado de $\RR^{2}$ que es Lebesgue-medible, entonces su área es finita. Más aún, podemos considerar a
el conjunto de todos los subconjuntos de $\Omega$ que son Lebesgue-medibles, este es un σ-álgebra sobre $\Omega$. En consecuencia, podemos definir una medida, y dar lugar a un espacio de probabilidad.
Definición. Sea $\Omega \subseteq \RR^{2}$ un conjunto acotado y con área bien definida mayor a $0$. Sea $\mathcal{L}(\Omega)$ el conjunto de todos los subconjuntos de $\Omega$ con área bien definida. Se define la probabilidad geométrica $\mathbb{P}\colon \mathcal{L}(\Omega) \longrightarrow \RR$ como sigue. Para cada $A \in \mathcal{L}(\Omega)$, se define $\Prob{A}$ como
En la definición anterior, el «área» de $A$, que denotamos por $\text{Area}(A)$, es precisamente $\lambda(A)$, la medida bidimensional de Lebesgue. No centres mucho tu atención en el uso de los conjuntos Lebesgue-medibles ni en la medida de Lebesgue. Nuestra intención es exhibir que la noción de «área» puede ser formalizada matemáticamente, y despertar tu interés por estudiar estos temas con más profundidad. Lo importante con lo que te debes de quedar es que, a cada subconjunto de $\Omega$ con área bien definida, se le asigna una probabilidad que es la proporción entre su área y el área de $\Omega$.
Esta medida de probabilidad asume que se cumple una propiedad llamada equiprobabilidad. Esto es, para cada $A \in \mathcal{L}(\Omega)$, no importa cuáles sean los elementos de $A$, lo único que importa para determinar su probabilidad es su área.
Un primer ejemplo de probabilidad geométrica
Ejemplo. Imagina que vas a tomar un autobús en una parada. Supongamos que tú y el autobús llegarán en tiempos aleatorios a la parada, entre las 12pm y la 1pm. Es decir, los tiempos de llegada tuyo y del autobús son valores $x$, $y \in [0,60]$, pues el tiempo (en minutos) entre las 12pm y la 1pm es de $60$ minutos. Además, supongamos que cuando el autobús llega, permanece en la parada $5$ minutos antes de irse; y cuando tú llegas, esperas $20$ minutos antes de irte si el autobús no llega. ¿Cuál es la probabilidad de que tomes el autobús?
Para resolver este problema, observa que $\Omega$ en este puede considerarse como
y que dado un par ordenado $(x,y)$, $x$ es tu tiempo de llegada y $y$ es el tiempo de llegada del autobús. Gráficamente, todos los posibles resultados están dentro de un cuadrado:
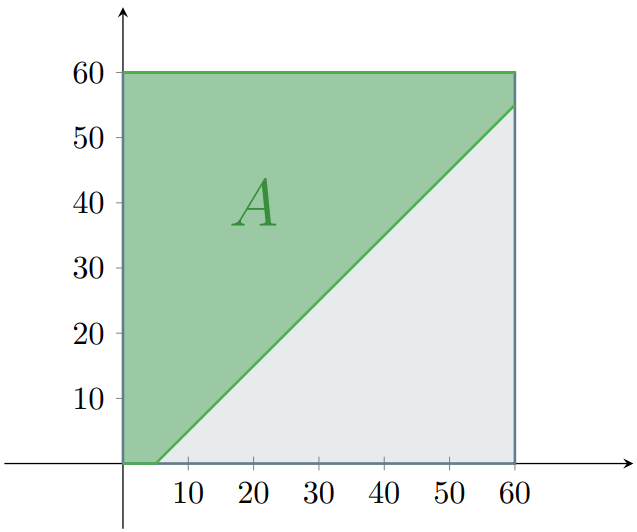
Luego, tenemos que encontrar las regiones que corresponden al evento en el que tú y el autobús coinciden. Primero, sabemos que el autobús espera $5$ minutos después de llegar, por lo que tú debes de llegar dentro de esos $5$ minutos que espera. Es decir, $x$, tu tiempo de llegada, debe de ser menor o igual a $y + 5$. Así, $x \leq y + 5$, o equivalentemente, $y \geq x – 5$. Este sería un evento $A$, dado como sigue:
\[ A = \{ (x,y) \in \Omega \mid y \geq x – 5 \}. \]
Figura. El evento $A$ de todos los pares ordenados $(x,y)$ \in \Omega$ tales que $y \geq x – 5$.
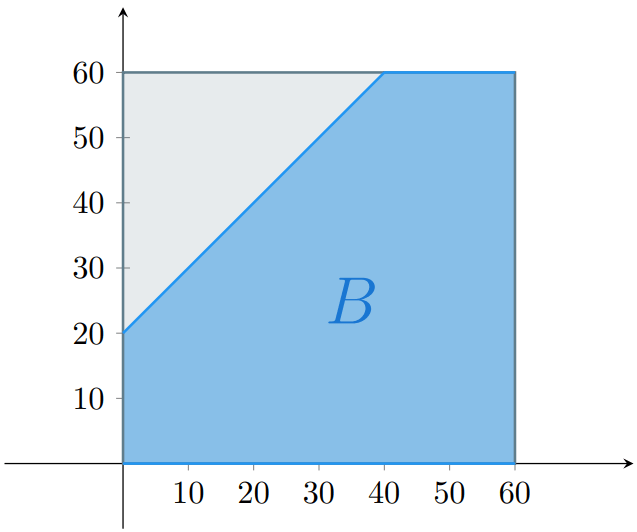
Por otro lado, tú esperas el autobús por $20$ minutos, por lo que no puedes llegar más de $20$ minutos antes que el autobús. Es decir, $x$ debe de ser mayor o igual a $y − 20$. Así, $x \geq y − 20$, o equivalentemente, $y \leq x + 20$. Por ello, el evento $B$ que representa a esta situación es
\[ B = \{ (x,y) \in \Omega \mid y \leq x + 20 \}. \]
Figura. El evento $B$ de todos los pares ordenados $(x,y) \in \Omega$ tales que $y \leq x + 20$.
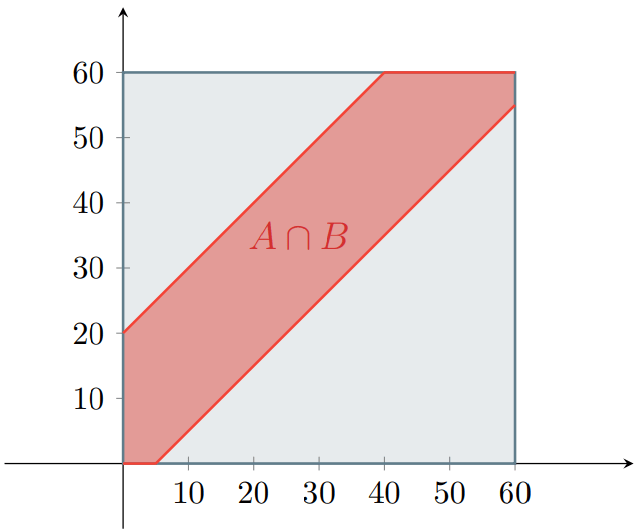
Intersecando ambas regiones obtenemos la región en donde tú y el autobús coinciden.
Figura. En todos los pares $(x,y) \in A \cap B$, el resultado es que tomas el autobús.
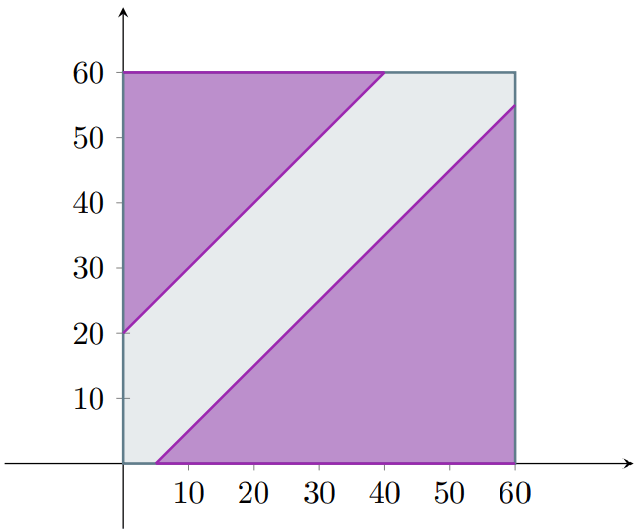
Y podemos utilizar la probabilidad geométrica para dar solución a este problema: la probabilidad de que tomes el autobús es el área de esta última región dividida entre el área total. Podemos utilizar la regla de complementación para facilitar el cálculo, pues las regiones en donde no tomas el autobús son triángulos y es más fácil calcular su área.
Figura. El área correspondiente a $(A \cap B)^\mathsf{c}$. Su área es más fácil de calcular que el área de $A \cap B$.
La región de arriba es un triángulo rectángulo cuyos catetos miden $40$, así que su área es $\frac{40^{2}}{2}$. De igual forma, la región de abajo es un triángulo rectángulo cuyos catetos miden $55$, por lo que su área es $\frac{55^{2}}{2}$. Por otro lado, el área de $\Omega$ es $60^2$, pues es un cuadrado cuyos lados miden $60$. Así, tenemos que
En conclusión, la probabilidad de que tomes el autobús es aproximadamente $0.35764$, o alternativamente, es aproximadamente un $35.764\%$.
El problema de la aguja de Buffon
En el siglo XVIII, el naturalista francés Georges-Louis Leclerc formuló un problema con un resultado muy interesante.
Supón que tenemos un piso hecho de bandas de madera, todas con la misma anchura, y dejamos caer una aguja al azar sobre el piso. ¿Cuál es la probabilidad de que la aguja caiga sobre la línea entre dos bandas?
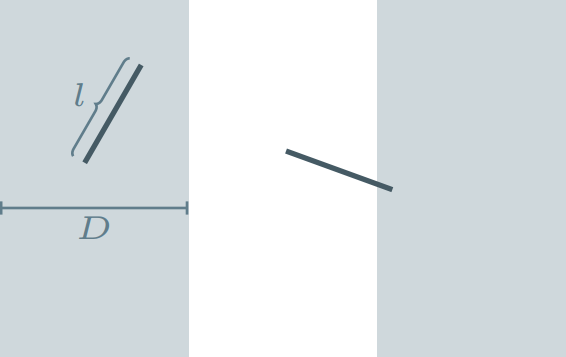
Este problema es conocido como la aguja de Buffon en honor a su creador: Georges-Louis Leclerc, conde de Buffon. Una solución utilizando algunos hechos geométricos fue publicada por Joseph-Émile Barbier en 1860 para el caso en el que la longitud de la aguja es menor a la anchura de las tablas de madera. Para resolver este problema, sea $l$ la longitud de la aguja y sea $D$ el ancho de cada banda de madera. Asumiremos que $0 < l < D$.
Figura. Ilustración de las primeras variables en el problema. $l$ es la longitud de la aguja, y $D$ es la anchura de cada banda de madera. Las bandas se ilustran con colores alternados.
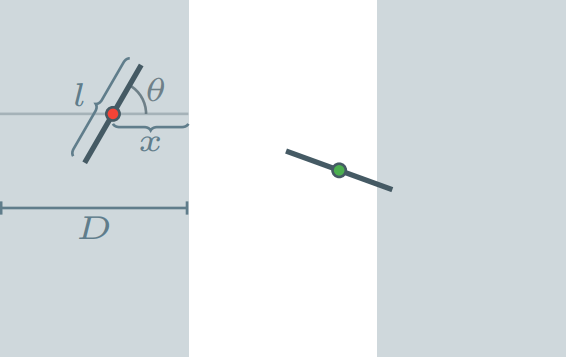
Ahora, sea $\theta$ el ángulo agudo que forma la aguja con el eje horizontal, y sea $x$ la distancia entre el centro de la aguja y la línea entre dos bandas más cercana.
Figura. Visualización de los valores $x$ y $\theta$. $\theta$ se toma siempre como el ángulo agudo que forma la aguja con el eje horizontal. Marcamos con rojo el centro de una aguja que no está sobre la línea entre dos bandas, y con verdeel centro de una aguja que sí está sobre una línea.
Observa que la aguja cae sobre la línea entre dos bandas si y sólamente si $x \leq \frac{l \cos{\theta}}{2}$. Esto pasa porque $l \cos{\theta}$ es la distancia horizontal de la aguja, así que $\frac{l \cos{\theta}}{2}$ es la distancia entre el centro de la aguja y la proyección sobre el eje horizontal de sus extremos. Por lo tanto, si la distancia entre el centro de la aguja y la línea entre dos bandas más cercana es menor o igual a $\frac{l \cos{\theta}}{2}$, la aguja atraviesa esta línea.
Figura. Comparación de $x$ con $l \cos{\theta}$. Observa cómo en la aguja de la izquierda, $x > \frac{l \cos{\theta}}{2}$, mientras que en la de la derecha, $x \leq \frac{l \cos{\theta}}{2}$.
Ahora, asumimos que los valores de $x$ y $\theta$ son aleatorios. Además, se debe de cumplir que $0 < x < \frac{D}{2}$, pues $0 < l < D$ (así que la distancia a la línea entre bandas más cercana es menor a $\frac{D}{2}$); y además $0 < \theta < \frac{\pi}{2}$. Por lo tanto, el espacio muestral de este fenómeno puede verse como
Y vimos que la aguja cae sobre la línea entre dos bandas si y sólamente si $x \leq \frac{l \cos{\theta}}{2}$, por lo que el evento $A$ que nos interesa es
\[ A = \left\lbrace (\theta,x) \in \Omega \; \middle| \; x \leq \frac{l \cos{\theta}}{2} \right\rbrace. \]
Observa que el área de $A$ se ve como en la siguiente figura:
Figura. Representación gráfica de $\Omega$ y del evento que nos interesa, $A$.
Así, el área de $A$ la podemos calcular integrando la función $\frac{l \cos{\theta}}{2}$ de $0$ a $\frac{\pi}{2}$. Así,
Una consecuencia interesante de la solución a este problema es que la probabilidad resultante involucra a $\pi$, una constante matemática muy importante. Mucho más adelante veremos una forma curiosa de aproximar el valor de $\pi$ repitiendo el experimento de la aguja de Buffon muchas veces.
Tarea moral
Los siguientes ejercicios son opcionales. Es decir, no formarán parte de tu calificación. Sin embargo, te recomiendo resolverlos para que desarrolles tu dominio de los conceptos abordados en esta entrada.
Sea $\Omega \subseteq \RR^{2}$ un conjunto acotado y con área bien definida. Sea $\mathcal{L}(\Omega)$ el conjunto de todos los subconjuntos de $\Omega$ que son Lebesgue-medibles, y sea $\mathbb{P}\colon \mathcal{L}(\Omega) \longrightarrow \RR$ la probabilidad geométrica. Es decir, para cada $A \in \mathcal{L}(\Omega)$, se define $\Prob{A}$ como \[ \Prob{A} = \frac{\text{Area}(A)}{\text{Area}(\Omega)}.\]Explica por qué $(\Omega, \mathcal{L}(\Omega), \mathbb{P})$ es un espacio de probabilidad. En particular, como ya acordamos que $\mathcal{L}(\Omega)$ es un σ-álgebra, basta con que expliques por qué la probabilidad geométrica es una medida de probabilidad.
Vuelve a hacer el ejercicio del autobús pero ahora supón que tú esperas al autobús durante $15$ minutos, y el autobús espera $7$ minutos.
En el problema de la aguja de Buffon, explica por qué si $l < D$ (esto es, la longitud de la aguja es menor que la anchura de las bandas), podemos concluir que $x$ (la distancia entre el centro de la aguja y la línea entre dos bandas más cercana) es menor a $\frac{D}{2}$.
Explica por qué si la longitud de la aguja $l$ es mayor a $D$ no podemos solucionar el problema de la forma en que lo hicimos.
Más adelante…
La probabilidad geométrica presenta una herramienta muy útil para dar solución a problemas con una interpretación espacial directa, como es el caso del problema de la aguja de Buffon. Además, resulta útil como una herramienta auxiliar para resolver ejercicios que no necesariamente tienen una interpretación visual directa, como el ejemplo del autobús. En conclusión, es una herramienta útil, pero que debes de tener cuidado con sus hipótesis: supone equiprobabilidad sobre el espacio muestral $\Omega$.
En la materia de Probabilidad II estudiarás a fondo la aleatoriedad en varias variables. Esto te dará herramientas más poderosas para describir la aleatoriedad sobre $\RR^2$ (y más allá) sin suponer que el espacio muestral es equiprobable.
Por lo pronto, en la siguiente entrada veremos un enfoque distinto de la probabilidad: la probabilidad frecuentista.
En las entradas anteriores hemos trabajado con la definición de límite y revisamos sus propiedades. En esta ocasión, daremos la definición de límite por la derecha y límite por la izquierda, que en conjunto son llamados límites laterales. De igual forma, revisaremos algunos ejemplos y su relación con la definición vista anteriormente.
Límites laterales
Las definiciones que veremos a continuación se basan en restringir la forma en que nos acercamos a $x_0.$ El límite por la derecha se enfoca en acercarnos por la derecha, es decir, pediremos que $x > x_0,$ lo cual se traducirá en que debe cumplirse que $0<x-x_0 < \delta$. Por otro lado, para el límite por la izquierda debe cumplirse que $x < x_0,$ de esta forma se tendrá que $0<x_0-x< \delta.$ Primero daremos la definición de límite por la derecha.
Definición. Sean $A \subset \mathbb{R}$ y $f: A \rightarrow \mathbb{R}.$ Se dice que $L \in \mathbb{R}$ es límite por la derecha de $f$ en $x_0,$ si para todo $\varepsilon >0$ existe $\delta > 0$ tal que si $0<x-x_0<\delta$ entonces $|f(x)-L| < \varepsilon.$ Cuando $L$ es el límite de $f$ en el punto $x_0$ por la derecha, lo denotamos $$\lim_{x \to x_0+} f(x) = L.$$
Análogamente, tenemos la definición de límite por la izquierda.
Definición. Sean $A \subset \mathbb{R}$ y $f: A \rightarrow \mathbb{R}.$ Se dice que $L \in \mathbb{R}$ es límite por la izquierda de $f$ en $x_0,$ si para todo $\varepsilon >0$ existe $\delta > 0$ tal que si $0<x_0 – x<\delta$ entonces $|f(x)-L| < \varepsilon.$ Cuando $L$ es el límite de $f$ en el punto $x_0$ por la izquierda, lo denotamos $$\lim_{x \to x_0-} f(x) = L.$$
Propiedades de los límites laterales
De forma similar al teorema que vimos para los límites, existe una relación entre el límite lateral de una función y el límite de una sucesión, basta agregar a los supuestos la condición de que la sucesión sea mayor que $x_0$ para todo $n \in \mathbb{N}$ en el caso de límite por la derecha y que sea menor que $x_0$ para todo $n \in \mathbb{N}$ en el caso de límite por la izquierda.
Teorema. Sea $A \subset \mathbb{R}.$ Definimos la función $f:A \rightarrow \mathbb{R}.$ Entonces, dado un $x_0,$ los siguientes enunciados son equivalentes.
$$\lim_{x \to x_0+} f(x) = L.$$
Para toda sucesión $\{ a_n \}$ en $A$ que converge a $x_0$ y tal que $a_n > x_0$ para todo $n\in \mathbb{N},$ la sucesión $\{f(a_n)\}$ converge a $L.$
El teorema de límite por la izquierda es similar al anterior. Además, la demostración es totalmente análoga a la revisada en una entrada anterior por lo cual quedará como tarea moral. También recordemos que este teorema nos ayuda a determinar las propiedades que tienen los límites laterales debido a la herencia que nos brinda el límite de una sucesión; es gracias a ello que podremos hacer uso de tales propiedades en los siguientes ejemplos.
Ejemplo 1. Sea $f: \mathbb{R} \rightarrow \mathbb{R},$ definida de la siguiente forma
Calculando el límite por la izquierda, tenemos $$\lim_{x \to -1^-} f(x) = \lim_{x \to -1^-} x^3+1 = 0.$$
Por otro lado, el límite por la derecha $$\lim_{x \to -1^+} f(x) = \lim_{x \to -1^+} x^2+1= 2.$$
Por lo tanto $$\lim_{x \to 0^-} f(x) = 0 \quad \text{ y } \quad \lim_{x \to 0^+} f(x) = 2.$$
Ejemplo 2. Sea $f: \mathbb{R} \setminus \{0 \} \rightarrow \mathbb{R}.$ Calcula los límites laterales en $x_0 = 0$ de
$$f(x) = \frac{|x|}{x}.$$
La gráfica de la función es la siguiente:
Calculando el límite por la izquierda, tenemos \begin{align*} \lim_{x \to 0^-} f(x) = & \lim_{x \to 0^-} \frac{|x|}{x} \\ = & \lim_{x \to 0^-} \frac{-x}{x} \text{, pues $x$ < 0} \\ = & \lim_{x \to 0^-} -1 \\ = & -1. \end{align*} Por otro lado, el límite por la derecha \begin{align*} \lim_{x \to 0^+} f(x) = & \lim_{x \to 0^+} \frac{|x|}{x} \\ = & \lim_{x \to 0^+} \frac{x}{x} \text{, pues $x$ > 0} \\ = & \lim_{x \to 0^+} 1 \\ = & 1. \end{align*} Por lo tanto $$\lim_{x \to 0^-} f(x) = -1 \quad \text{ y } \quad \lim_{x \to 0^+} f(x) = 1.$$
De los ejemplos revisados, el primero tiene la propiedad de que sus límites laterales son iguales mientras que para el segundo y el tercero tales límites son distintos en $x_0.$
Relación entre el límite de una función y sus límites laterales
Parece inmediato inferir que, considerando un punto $x_0$ dado, si los límites por la izquierda y por la derecha existen y son iguales, entonces el límite de la función sí existe en tal punto. De la misma manera, resulta natural que si el límite existe, entonces los límites laterales también existen y son iguales. Probaremos esta equivalencia, pero para hacerlo, primero demostraremos la siguiente proposición.
Proposición. Sean $x,$ $x_0$ en $\mathbb{R}$ y $\delta >0.$ Entonces $0<|x-x_0|< \delta$ si y solo si $0<x-x_0<\delta \quad$ ó $\quad 0<x_0-x<\delta.$
Demostración. Supongamos que $0<|x-x_0|< \delta$.
Caso 1: $x-x_0 > 0$. Entonces $|x-x_0| = x-x_0$, así \begin{gather*} 0<|x-x_0|< \delta \Leftrightarrow 0< x-x_0 < \delta. \end{gather*}
Caso 2: $x- x_0 < 0$. Entonces $|x-x_0| = x_0-x$, así \begin{gather*} 0<|x-x_0| < \delta \Leftrightarrow 0< x_0-x < \delta. \end{gather*}
Teorema. El límite de una función $f$ en el punto $x_0$ existe y es igual a $L$ si y solo si los límites laterales existen y son iguales a $L$, es decir
$$\lim_{x \to x_0} f(x) = L \quad \Leftrightarrow \quad \lim_{x \to x_0^+} f(x) = L = \lim_{x \to x_0^-} f(x).$$
Demostración.
$\Rightarrow]$ Supongamos que $$\lim_{x \to x_0} f(x) = L.$$ Sea $\varepsilon > 0$. Como $f$ converge a $L$ en $x_0$, existe $\delta > 0$ tal que si $0<|x-x_0|< \delta$ se tiene que $|f(x)-L| < \varepsilon.$
Si $0<x-x_0 < \delta$, entonces $0<|x-x_0|< \delta$ por la proposición anterior. Se sigue que \begin{gather*} |f(x)-L| < \varepsilon. \\ \therefore \lim_{x \to x_0^+} f(x) = L. \end{gather*}
Si $0<x_0-x < \delta$, entonces $0<|x-x_0|< \delta$ por la proposición anterior. Se sigue que \begin{gather*} |f(x)-L| < \varepsilon. \\ \therefore \lim_{x \to x_0^-} f(x) = L. \end{gather*}
$\Leftarrow]$ Supongamos que $$\lim_{x \to x_0^+} f(x) = L = \lim_{x \to x_0^-} f(x)$$ Sea $\varepsilon > 0.$
Como $\lim\limits_{x \to x_0^+} f(x) = L$, existe $\delta_1$ tal que si $0<x-x_0<\delta_1$ entonces $|f(x)-L| < \varepsilon.$
Como $\lim\limits_{x \to x_0^-} f(x) = L$, existe $\delta_2$ tal que si $0<x_0-x<\delta_2$ entonces $|f(x)-L| < \varepsilon.$
Consideremos $\delta = min \{ \delta_1, \delta_2\}.$ Por la proposición, si $0<|x-x_0|< \delta$, entonces $0<x-x_0<\delta$ ó $0<x_0-x<\delta.$
Para el primer caso, tenemos que $0<x-x_0<\delta \leq \delta_1$, entonces $|f(x)-L| < \varepsilon.$ Para el segundo caso, se tiene que $0<x_0-x<\delta \leq \delta_2$, entonces $|f(x)-L| < \varepsilon.$
Observación. Ya que hemos demostrado este teorema, podemos notar que si los límites laterales de una función son distintos en un punto $x_0$, entonces no existe el límite de la función en tal punto.
Finalizaremos esta entrada revisando los siguientes ejemplos.
Ejemplo 3. Determina si existe el límite en $x_0 = 0$ para la siguiente función $$f(x) = x \sqrt{\frac{1}{4x^2}-16}.$$
Veamos primero qué sucede con el límite por la izquierda \begin{align*} \lim_{x \to 0^-} f(x) = & \lim_{x \to 0^-} x \sqrt{\frac{1}{4x^2}-16} \\ \\ = & \lim_{x \to 0^-} x \sqrt{\frac{1-64x^2}{4x^2}} \\ \\ = & \lim_{x \to 0^-} \frac{ x \sqrt{1-64x^2} }{ \sqrt{4x^2} } \\ \\ = & \lim_{x \to 0^-} \frac{ x \sqrt{1-64x^2} }{ 2|x|} \\ \\ = & \lim_{x \to 0^-} \frac{ x \sqrt{1-64x^2} }{ -2x} \text{, pues $x$ < 0} \\ \\ = & \lim_{x \to 0^-} – \frac{\sqrt{1-64x^2} }{2} \\ \\ = & – \frac{1}{2}. \end{align*}
Como los límites laterales son distintos, podemos concluir que el límite de la función $f$ no existe en el punto $x_0 = 0.$
Ejemplo 4. Sea $f: \mathbb{R} \rightarrow \mathbb{R}$, definida de la siguiente forma $$f(x) = \begin{cases} x^2 & \quad \text{si } x<5 \\ 2x+15 & \quad \text{si } x \geq 5. \\ \end{cases} $$ Determina si el límite existe en $x_0 = 5.$
Iniciemos calculando el límite por la izquierda. $$\lim_{x \to 5^-} f(x) = \lim_{x \to 5^-} x^2 = 25.$$
Por otro lado, el límite por la derecha $$\lim_{x \to 5^+} f(x) = \lim_{x \to 5^+} 2x+15 = 25.$$
Por lo tanto $$\lim_{x \to 0^-} f(x) = 25 \quad \text{ y } \quad \lim_{x \to 0^+} f(x) = 25.$$
Como los límites laterales existen y son iguales, podemos concluir que $$\lim_{x \to 0} f(x) = 25.$$
Más adelante…
¿Qué sucede cuando en lugar de acercarnos a un punto en particular $x_0$, hacemos que $x$ crezca indefinidamente? Esto y otras ampliaciones del concepto del límite serán revisadas en la siguiente entrada con lo cual estaremos listos para calcular todo tipo de límites y, con ello, podremos conocer el comportamiento que toman las funciones tanto en un punto específico como «en el infinito».
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En las entradas anteriores hemos estudiado las soluciones a ecuaciones de primer orden desde dos distintos puntos de vista, el cualitativo y el analítico. En el camino hemos encontrado un comportamiento similar en las soluciones, como es el que el problema de condición inicial tenga una solución, o que las curvas solución no se intersectan en el plano. Estos comportamientos no son una casualidad, y están justificados por el teorema de existencia y unicidad que nos dice que el problema de condición inicial tiene una y sólo una solución definida en un intervalo $(a,b)$. Este teorema, en su versión para ecuaciones lineales sustenta el trabajo que hemos realizado en los últimos videos.
Teorema de existencia y unicidad para ecuaciones lineales de primer orden
En el video demostramos la versión del teorema de existencia y unicidad para ecuaciones lineales de primer orden.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Resuelve el problema de condición inicial $\frac{dy}{dt}=\frac{y}{t}$ ; $y(t_{0})=y_{0}$, con $t_{0}\neq 0$, $y_{0}\neq 0$.
Resuelve el problema de condición inicial inicial $\frac{dy}{dt}=\frac{y}{t}$ ; $y(0)=0$.
Resuelve el problema de condición inicial $\frac{dy}{dt}=\frac{y}{t}$ ; $y(0)=y_{0}$, con $y_{0}\neq 0$.
¿Contradicen las soluciones de los ejercicios anteriores el Teorema de existencia y unicidad?
Esboza las soluciones a la ecuación diferencial.
Más adelante
Con esta entrada terminamos el estudio a las ecuaciones lineales de primer orden. En la siguiente entrada comenzaremos a estudiar ecuaciones diferenciales no lineales de primer orden. En particular veremos un caso especial de estas ecuaciones, a las que llamaremos ecuaciones separables.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
A partir de la noción de adjunción que definimos en la entrada anterior, es posible definir ciertos tipos especiales de transformaciones lineales: las transformaciones normales, las simétricas y las antisimétricas.
Primero veremos las transformaciones lineales simétricas y antisimétricas. Estos nombres quizás te recuerden a las matrices simétricas y antisimétricas. Existe una relación importante entre ambos conceptos, aunque no es tan directo enunciarla. Veremos esto con calma.
Después, hablaremos de las transformaciones normales. Este tipo de transformaciones están motivadas por la pregunta de qué sucede cuando una transformación conmuta con su adjunta. Definiremos esto de manera adecuada y demostraremos algunas propiedades que cumplen las transformaciones normales.
En esta entrada $V$ es un espacio euclidiano. En particular, estaremos trabajando únicamente en espacios vectoriales sobre los reales. Más adelante discutiremos los análogos complejos de los resultados que veremos.
Transformaciones simétricas y antisimétricas
Comencemos con las siguientes dos definiciones.
Definición. Sea $V$ un espacio euclideano con producto interior $\langle \cdot, \cdot \rangle$. Sea $T:V\to V$ una transformación lineal. Diremos que $T$ es:
Simétrica o auto-adjunta si $T^*=T$.
Antisimétrica o alternante si $T^*=-T$.
Tal vez estos nombres te parezcan familiares. El siguiente problema nos ayudará a explicar la relación entre las transformaciones simétricas y las matrices que llevan el mismo nombre.
Problema. Sea $V$ un espacio euclideano con producto interior $\langle \cdot, \cdot \rangle$. Sea $T:V\to V$ una transformación lineal simétrica. Sea $A$ la forma matricial de $T$ en alguna base ortonormal de $T$. Demuestra que $A$ es una matriz simétrica.
Solución. Por una proposición de la entrada anterior, por elegir una base ortonormal se tiene que la matriz correspondiente a $T^\ast$ es $^t A$. Pero como $T$ es una matriz simétrica, se tiene que $T^\ast=T$. De este modo, $^t A= A$, y por lo tanto $A$ es una matriz simétrica.
$\square$
Sucede algo análogo con las matrices antisimétricas, lo cual queda como tarea moral.
Transformaciones normales
Introduzcamos una definición más.
Definición. Sea $V$ un espacio euclidiano y $T:V\to V$ una transformación lineal. Diremos que $T$ es normal si $T$ conmuta con su transformación adjunta, es decir, si $$TT^*=T^*T.$$
Similarmente, diremos que una matriz $A\in M_n(\mathbb{R})$ es normal si $$A{}^tA={}^tAA.$$
Ejemplo. La matriz $\begin{pmatrix} 1 & -3 \\ 3 & 1 \end{pmatrix}$ es normal. En efecto, puedes verificar que:
Las definiciones de transformaciones y matrices normales están conectadas mediante el siguiente resultado sencillo de demostrar.
Proposición. Si $T:V\to V$ es una transformación es normal con $V$ espacio euclideano y tomamos una base ortonormal $\beta$ de $V$, entonces $\text{Mat}_\beta(T)$ es normal.
Caracterización geométrica de transformaciones normales
Las matrices normales tienen algunas propiedades geométricas que las caracterizan. El siguiente enunciado formaliza esto.
Problema. Sea $T$ una transformación lineal sobre un espacio euclidiano $V$. Demuestra que los siguientes incisos son equivalentes:
Solución. $(1)\Rightarrow (2)$. Supongamos $(1)$. Usando la identidad de polarización dos veces y la linealidad de $T$ y $T^*$ obtenemos \begin{align*} \langle T(x),T(y) \rangle &=\frac{||T(x+y)||^2-||T(x)||^2-||T(y)||^2}{2}\\ &=\frac{||T(x+y)^*||^2-||T(x)^*||^2-||T(y)^*||^2}{2}\\ &=\langle T(x)^*,T(y)^* \rangle. \end{align*} lo cual prueba $(2)$.
$(2)\Rightarrow (3)$. Supongamos ahora $(2)$. Entonces para cualesquiera $x,y\in V$ se tiene que \begin{align*} \langle (T\circ T^* – T^*\circ T)(x), y \rangle &=\langle T(T^*(x)),y\rangle- \langle T^*(T(x)) ,y\rangle \\ &=\langle T^*(x),T^*(y) \rangle – \langle y,T^*(T(x))\rangle\\ &=\langle T(x),T(y) \rangle – \langle T(y),T(x)\rangle\\ &=0. \end{align*} Como la igualdad anterior se da para todo $y$, en particular se cumple, por ejemplo, para los $y$ de una base. Así, $(T\circ T^*-T^*\circ T)(x)=0$ para cualquier $x\in V$, lo que precisamente significa que $T\circ T^*= T^*\circ T$, es decir, que $T$ es normal.
$(3)\Rightarrow (1)$. Finalmente, supongamos $(3)$. Entonces \begin{align*} ||T(x)||^2&=\langle T(x),T(x)\rangle\\ &=\langle x,T^*(T(x))\rangle \\ &= \langle T(T^*(x)),x \rangle\\ &=\langle T^*(x),T^*(x) \rangle \\ &= ||T^*(x)||^2, \end{align*} y por lo tanto $||T(x)||=||T^*(x)||$ para todo $x\in V$, lo que prueba $(1)$.
$\square$
Más adelante…
Por la proposición que enunciamos para transformaciones normales, tenemos que si $T$ es de este tipo, entonces $||T(x)||=||T^*(x)||$. Esto es una propiedad geométrica, pues está relacionando dos normas. Sin embargo, una cosa que nos interesa mucho estudiar es cuándo sucede algo parecido: $||T(x)||=||x||$. Esto lo que nos estaría diciendo es que «$T$ preserva las normas». En la siguiente entrada motivaremos y exploraremos este tipo de transformaciones lineales, a las que llamaremos ortogonales.
Tarea moral
Demuestra que la forma matricial de una transformación antisimétrica, bajo una base ortonormal, es una matriz antisimétrica.
Demuestra que cualquier transformación lineal $T$ en un espacio euclideano puede ser escrita de la forma $T=S+A$, donde $S$ es transformación lineal simétrica y $A$ es transformación lineal antisimétrica. Demuestra que esta manera de escribir a $T$ es única.
Hemos platicado mucho de qué sucede cuando representamos transformaciones lineales en un espacio euclideano $V$ mediante bases ortonormales. Pero, ¿qué pasa si no hacemos esto? Determina si lo siguiente es verdadero o falso cuando elegimos una base $\beta$ de $V$ que no sea ortonormal.
Si $A$ es la matriz de una transformación $T$ en la base $\beta$, entonces $^tA$ es la matriz de $T^\ast$ en la base $\beta$.
Si $T$ es simétrica, entonces su matriz $A$ en la base $\beta$ es simétrica.
Si $T$ es normal, entonces su matriz $A$ en la base $\beta$ es normal.
Sea $T:\mathbb{R}^2\to \mathbb{R}^2$ un rotación de ángulo $\theta\in(0,\pi)$. La representación matricial de $T$ en la base canónica está dada por $$\begin{pmatrix} \cos\theta &-\sin\theta\\ \sin\theta &\cos\theta \end{pmatrix}.$$ Verifica que $T$ es normal.
Sea $V$ un espacio euclidiano y $T:V\to V$ una transformación lineal normal. Prueba que $T-c\text{id}$ es normal para todo real $c$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»