permite analizar el comportamiento de magnitudes que dependen de un parámetro y cuyos valores son vectores. A diferencia de las funciones reales tradicionales, donde el límite describe cómo se comporta un número cuando la variable se aproxima a cierto valor, en las funciones vectoriales estudiamos cómo se comporta un vector completo, es decir, cómo evolucionan simultáneamente sus componentes.
Definición. Sea $f:\mathbb{R}\rightarrow \mathbb{R}^{n}$ una función vectorial definida para todos los valores de $t$ en alguna vecindad de un punto $t_0$, excepto quiza en $t_0$. Entonces se dice que el límite de la función f cuando $t$ se acerca a $t_0$ es $L\in\mathbb{R}^{n}$ y se expresa como \[ \lim_{t\rightarrow t_0} f(t)=L \] si y solo si $\forall$ $\epsilon>0$ $\exists ~\delta~>~0$ tal que $|f(t)-L|~<~\epsilon$, siempre que $|t-t_0|<\delta$
Teorema. Si $f:I\subset\mathbb{R}\rightarrow\mathbb{R}^n$ es una función vectorial, entonces \[ \lim_{t\rightarrow t_0}f(t)=L=(l_1,\cdots,l_n)\in \mathbb{R}^n\ \ \ \Leftrightarrow\ \ \ \lim_{t\rightarrow t_0}x_i(t)=l_i~~\forall~i=1,…,n \] Donde $f(t)=(x_1(t),\cdots,x_n(t))$
Demostración. Si \[ \lim_{t\rightarrow t_0}f(t)=L \] entonces $\forall$ $\epsilon>0$ $\exists$ $\delta>0$ tal que si $0<|t-t_0|<\delta$, entonces $|f(t)-L|<\epsilon$. Pero como \[ |f(t)-L|=|x_1(t)-l_1,\cdots,x_n(t)-l_n|= \left(\sum_{i=1}^n(x_i(t)-l_i)^2\right)^{\frac{1}{2}}<\epsilon \] se tiene que \[ |x_i(t)-l_i|\leq\left(\sum_{i=1}^n(x_i(t)-l_i)^2\right)^{\frac{1}{2}}<\epsilon \] Por lo tanto dado $\epsilon>0$ existe $\delta>0$ tal que $0<|t-t_0|<\delta\Rightarrow|x_i(t)-l_i|<\epsilon$ por lo tanto \[ \lim_{t\rightarrow t_0}x_i(t)=l_i \] Reciprocamente supongamos ahora que \[ \lim_{t\rightarrow t_0}x_i(t)=l_i\ \ \ \ \ i=1,\cdots,n. \] Esto quiere decir que $\forall$ $\epsilon_i>0$ $\exists$ $\delta_i>0$ tal que $0<|t-t_0|<\delta_i\Rightarrow|x_i(t)-l_i|<\epsilon_i$.
Sea $\epsilon>0$ y sea $\displaystyle{\epsilon_i=\frac{\epsilon}{\sqrt{n}}}$ tomamos $\delta=\textbf{min}(\delta_1,\cdots,\delta_n)$.
Para esta $\delta$ se tiene que si $0<|t-t_0|<\delta\Rightarrow|x_i(t)-l_i|<\frac{\epsilon}{\sqrt{n}}$ $\forall$ $i=1,\cdots,n$, entonces \[ |f(t)-L|=\left(\sum_{i=1}^n(x_i(t)-l_i)^2\right)^\frac{1}{2}< \left(\sum_{i=1}^n\left(\frac{\epsilon}{\sqrt{n}}\right)^2\right)^\frac{1}{2}=\epsilon \] Por lo tanto \[ \lim_{t\rightarrow t_0}f(t)=L~~ \blacksquare \]
Ejemplo. Se sabe que \[ \lim_{t\rightarrow 2} (t,t)=(2,2) \] Dado $\epsilon>0$, determine $\delta>0$ que verifique la validez del límite.
Tenemos que \[ \lim_{t\rightarrow 2}(t,t)=\left(\lim_{t\rightarrow 2}t, \lim_{t\rightarrow 2}t\right)=(2,2) \]
$\therefore$ Según la definición $$|(t,t)-(2,2)|=\sqrt{(t-2)^2+(t-2)^2}=\sqrt{2(t-2)^2}=\sqrt{2}|t-2|$$ $$\therefore \quad si\quad \sqrt{2}|t-2|<\epsilon$$ podemos definir a $\displaystyle{\delta=\frac{\epsilon}{\sqrt{2}}}$.$~~ \blacksquare$
Ejemplo. Se sabe que \[ \lim_{t\rightarrow 2} (t,t^{3})=(2,8) \] Dado $\epsilon>0$, determine $\delta>0$ que verifique la validez del límite.
Tenemos que \[ \lim_{t\rightarrow 2}(t,t^{3})=\left(\lim_{t\rightarrow 2}t, \lim_{t\rightarrow 2}t^{3}\right)=(2,8) \] Ahora bien para $\displaystyle{\delta_{1}=\frac{\epsilon}{\sqrt{2}}}$ se tiene $$0<|t-2|<\delta_{1}~\Rightarrow~|t-2|<\frac{\epsilon}{\sqrt{2}}$$
y para $\displaystyle{\delta_{2}=\frac{\epsilon}{\sqrt{2}}}$ se tiene $$0<|t^{3}-8|<\delta_{2}~\Rightarrow~|t^{3}-8|<\frac{\epsilon}{\sqrt{2}}$$ Por lo tanto si consideramos $\delta=min{\delta_{1},\delta_{2}}$ se tiene $$|(t,t^{3})-(2,8)|=\sqrt{(t-2)^2+(t^{3}-8)^2}<\sqrt{\left(\frac{\epsilon}{\sqrt{2}}\right)^2+\left(\frac{\epsilon}{\sqrt{2}}\right)^2}=\sqrt{2\frac{\epsilon^{2}}{2}}=\epsilon$$ $$\therefore \lim_{t\rightarrow 2} (t,t^{3})=(2,8).~~ \blacksquare$$
Continuidad de Funciones Vectoriales
Ahora que sabemos cómo calcular el límite de una función vectorial, podemos definir la continuidad en un punto para tal función.
Definición. Sea $f:\mathbb{R}\rightarrow\mathbb{R}^n$ una función vectorial. Se dice que $f$ es continua en $t_0$ si y solo si se cumple que \[ \lim_{t\rightarrow t_0}f(t)=f(t_0) \]
Teorema. La función vectorial $f(t)=(x_{1}(t),x_{2}(t),…,x_{n}(t))$ es continua en $t_0$ si y solo si $x_{1},x_{2},…,x_{n}$ son continuas en $t_0$.
Demostración. Como $f(t)$ es continua en $t=t_{0}$, tenemos que se cumple $$\lim_{t\rightarrow t_{0}}f(t)=f(t_{0})$$ Por otro lado se tiene que $$\lim_{t\rightarrow t_{0}}f(t)=\lim_{t\rightarrow t_{0}}\left(x_{1}(t),x_{2}(t),…,x_{n}(t)\right)=\left(\lim_{t\rightarrow t_{0}}x_{1}(t),\lim_{t\rightarrow t_{0}}x_{2}(t),…,\lim_{t\rightarrow t_{0}}x_{n}(t)\right)$$ y como $f(t_{0})=(x_{1}(t_{0}),x_{2}(t_{0}),…,x_{n}(t_{0}))$ entonces $$\left(\lim_{t\rightarrow t_{0}}x_{1}(t),\lim_{t\rightarrow t_{0}}x_{2}(t),…,\lim_{t\rightarrow t_{0}}x_{n}(t)\right)=(x_{1}(t_{0}),x_{2}(t_{0}),…,x_{n}(t_{0}))$$ $$\therefore \quad \lim_{t\rightarrow t_{0}}x_{1}(t)=x_{1}(t_{0})\quad , \quad \lim_{t\rightarrow t_{0}}x_{2}(t)=x_{2}(t_{0}),…,\lim_{t\rightarrow t_{0}}x_{n}(t)=x_{n}(t_{0})$$ $\therefore$ $x_{1}(t),x_{2}(t),…x_{n}(t)$ son continuas en $t=t_{0}$.$~~ \blacksquare$
Ejemplo. Definir la función \[ f(t)=\frac{\sin t}{t}\hat{i}+\cos (t) \hat{j} \] en $t=0$ de manera que $f(t)$ sea continua en $t=0$.
Tenemos que \[ \lim_{t\rightarrow 0}f(t)= \lim_{t\rightarrow 0}\frac{\sin t}{t}\hat{i}+\cos t \hat{j}= \hat{i}+\hat{j} \] Por lo tanto si definimos $f(0)=\hat{i}+\hat{j}$, entonces \[ \lim_{t\rightarrow t_0} f(t)=f(t_0).~~ \blacksquare \]
Teorema. Si f es continua en $A\subset \mathbb{R}$ entonces para toda sucesión $x_{k}$ en A tal que $x_{k}\rightarrow x_{0}$ se tiene que $f(x_{k})\rightarrow f(x_{0})$
Demostración. $\left(\textcolor{red}{\Rightarrow}\right)$ Supongamos que $x_{k}\rightarrow x$ para mostar que $f(x_{k})\rightarrow f(x)$ sea $\epsilon>0$ como f es continua en $x_{0}\in A$ se tiene que $$0<|x-x_{0}|<\delta\Rightarrow |f(x)-f(x_{0})|<\epsilon$$ elegimos entonces $k>N$ tal que
$\left(\textcolor{red}{\Leftarrow}\right)$ Supongamos que para cada $x_{k}\in A$ tal que $x_{k}\rightarrow x$ se tiene que $|f(x_{k})-f(x)|<\epsilon$ y queremos demostrar que f es continua en $x_{0}$. Si $x_{k}\rightarrow x_{0}$ entonces $|x_{k}-x_{0}|<\epsilon$ si $k>N_{0}$ tomemos $\delta=\epsilon_{1}$ y tenemos que $$|x_{k}-x_{0}|<\epsilon_{1}\Rightarrow|x_{k}-x_{0}|<\delta\Rightarrow|f(x_{k})-f(x_{0})|<\epsilon~~ \blacksquare$$
Más adelante
Ya que se definieron las funciones vectoriales y se abordó el tema límites y continuidad en estas, a continuación veremos el cálculo subyacente a este tipo de funciones como lo son la derivabilidad y la integrabilidad.
Tarea Moral
1.- Determina el siguiente límite:
\[ \lim_{ x \rightarrow 1}(\dfrac{x^2-1}{x-1}, \sqrt(x+8), \frac{sen\pi x}{ln x}) \]
2.- Analiza la continuidad de la siguiente función
3.- Si \[ \lim_{ x \rightarrow a} f(x) = b \] pruebe que \[ \lim_{ x \rightarrow a} | f(x)| =|b| \]
5.- Si \[ \lim_{ x \rightarrow a} f(x) = b \] pruebe que \[ \lim_{ x \rightarrow a} \dfrac {f(x) }{ | f(x)|}=\dfrac{b}{|b|} \]
Enlaces
El siguiente link muestra un código en python de una calculadora de límites de funciones vectoriales. Podrás introducir la información de una función vectorial, como variable (parámetro), cada entrada y el valor al que deseas que se aproxime.
Una función vectorial es una función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ ó $f:\mathbb{R}\rightarrow\mathbb{R}^{3}$ de la forma $$f(t)=x(t)i+y(t)j~~\acute{o}~~f(t)=x(t)i+y(t)j+z(t)k$$ donde las funciones componentes $x(t)$, $y(t)$ y $z(t)$ son funciones de valor real del parámetro t. Las funciones con valores vectoriales son también escritas en forma $$f(t)=(x(t),y(t))~\acute{o}~f(t)=(x(t),y(t),z(t))$$ En ambos casos, la primera forma de la función define una función vectorial bidimensional; la segunda forma describe una función vectorial tridimensional.
En el siguiente applet desarrollado en Geogebra, podrás manipular un parametro d, dentro de un intervalo $[a,b]$, de tal manera que podrás observar como se va dibujando una curva en el plano.
De acuerdo al applet, el parámetro $d$ puede estar entre dos números reales: $a \leq d \leq b$. Otra posibilidad es que el valor de d tome todos los numeros reales. Las funciones de los componentes en sí mismas pueden tener restricciones de dominio que imponen restricciones en el valor de t. A menudo usamos $t$ como parámetro porque $t$ puede representar el tiempo.
Las rectas en el plano, las podemos pensar como un conjunto definido de la siguiente forma: $$\ell=\left\{(x,y)\in\mathbb{R}^{2}~\Big{|}~ax+by+c=0\right\}$$ Si $a\neq 0$ entonces para cualquier $(x,y)\in\ell$ se tiene $$x=\frac{-c-by}{a}$$ Por tanto, a la pareja $(x,y)$ la podemos escribir como $$\left(\frac{-c-by}{a},y\right)$$ es decir, la podemos escribir en términos de una sola variable. Por lo que si consideramos la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$f(t)=\left(\frac{-c-bt}{a},t\right)$$ se cumple que $f(\mathbb{R})=\ell$, es decir, que la imagen de la función es toda la recta.
En efecto, para cualquier elemento $t$ en $f(\mathbb{R})$ se cumple $$a\left(\frac{-c-bt}{a}\right)+bt+c=(-c-bt)+bt+c=0$$ con lo cual concluimos $f(\mathbb{R})\subset \ell$. Por otra parte, si $(x,y)\in\ell$, basta tomar $t=y$ para que se cumpla $$f(y)=\left(\frac{-c-by}{a},y\right)=(x,y)$$ con lo que concluimos que $\ell\subset f(\mathbb{R})$ y por lo tanto $f((\mathbb{R}))=\ell$.$~~\blacksquare$
Con un razonamiento similar se puede probar que la circunferencia con centro en el origen y radio $r$, se puede describir como el conjunto $$C_{r}=\left\{(x,y)\in\mathbb{R}^{2}~\Big{|}~x^{2}+y^{2}=r^{2}\right\}$$ y dicho conjunto se puede obtener como la imagen de la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$f(t)=(r\cos(t),r\sin(t)),~~t\in[0,2\pi].~~\blacksquare$$
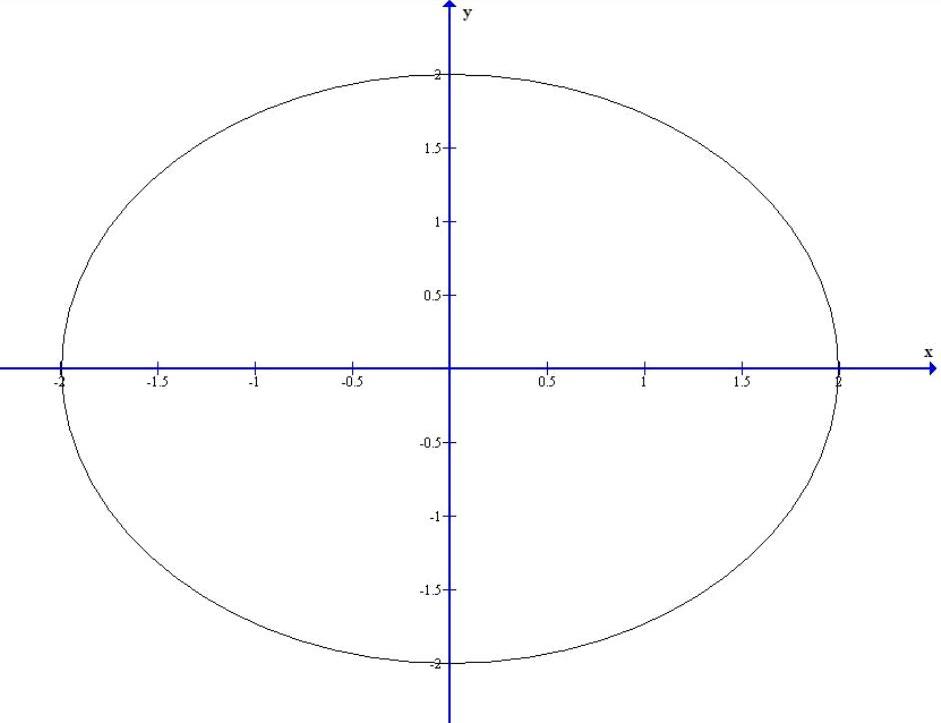
Con un razonamiento similar se puede probar que la elipse, se puede describir como el conjunto $$E=\left\{(x,y)\in\mathbb{R}^{2}~\Big{|}~\frac{x^{2}}{a^{2}}+\frac{y^{2}}{b^{2}}=1\right\}$$ y dicho conjunto se puede obtener como la imagen de la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$\boxed{f(t)=(a\cos(t),b\sin(t)),~~t\in[0,2\pi].}$$ $\blacksquare$
En general si un subconjunto $C\subset \mathbb{R}^{n}$ es tal que coincide con la imagen de una función $f:\mathbb{R}\rightarrow\mathbb{R}^{n}$, diremos que dicha función es una parametrización de C.
Definición. Sea $C\subset\mathbb{R}^{n}$. Si existe $\gamma=(\gamma_{1},\gamma_{2},…,\gamma_{n}):\mathbb{R}\rightarrow\mathbb{R}^{n}$ tal que $\gamma(I)=C$ decimos que $\gamma$ es una parametrización de C. En tal caso diremos que las ecuaciones \begin{align*} x_{1} & =\gamma_{1}(t) \\ x_{2} & =\gamma_{2}(t) \\ \vdots & =\vdots \\ x_{n} & =\gamma_{n}(t) \end{align*}
son unas ecuaciones paramétricas de C.
Ejemplo. Si $f$ es la función vectorial por $f(t)=(2\cos(t),2\sin(t))$ con $t\in[0,2\pi]$, tenemos entonces que $f$ asocia a cada número real $t$ en el intervalo $[0,2\pi]$, un par ordenado $(x,y)$ con $x=2\cos t$ y $y=2\sin t$, que son las ecuaciones paramétricas de una circunferencia de radio 2 y centro en el origen. Asi pues la gráfica de $f$ es una circunferencia.
Cada una de las funciones vectoriales que se dan a continuación, define el mismo lugar geométrico o una parte de éste; sin embargo, el sentido, el punto de partida y la rapidez de recorrido así como la porción de la curva que se considera en cada caso varia. \begin{align*} f_{1}(t) &=(2\cos t, 2\sin t) \quad t\in[0,2\pi] \\ f_{2}(t) &=(2\cos t, 2\sin t) \quad t\in[0,\pi] \\ f_{3}(t) &=(2\cos 3t, 2\sin 3t) \quad t\in[0,2\pi] \\ f_{4}(t) &=(2\cos t, 2\sin t) \quad t\in[0,\pi] \\f_{5}(t) &=(2\cos t, 2\sin t) \quad t\in[0,6\pi] \\ f_{6}(t) &=(2\cos t, 2\sin t) \quad t\in[-\pi,\pi] \end{align*}
Para una función vectorial en $\mathbb{R}^{3}$ decimos que: Si $D$ es un conjunto de $\mathbb{R}$, entonces $f(t)$ es una función vectorial con dominio $D$ si y sólo si, para todo $t\,\epsilon\,D$ $$f(t)=x_{1}(t)i+x_{2}(t)j+x_{3}(t)k$$ donde $x_{1}(t),x_{2}(t)$ y $x_{3}(t)$ son funciones escalares con dominio $D$. $\blacksquare$
Ejemplo. Que representa la función vectorial cuyas ecuaciones parametricas son: $$f(t)=\left(\frac{1-t^{2}}{1+t^{2}},\frac{2t}{1+t^{2}}\right)$$
En este caso haciendo la sustitución $\displaystyle{t=\tan\left(\frac{u}{2}\right)}$ se tiene que
$$\frac{1-t^{2}}{1+t^{2}}=\frac{1-\tan^{2}\left(\frac{u}{2}\right)}{1+\tan^{2}\left(\frac{u}{2}\right)}=\frac{1-\frac{\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}{1+\frac{\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}=\frac{\frac{\cos^{2}\left(\frac{u}{2}\right)-\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}{\frac{\cos^{2}\left(\frac{u}{2}\right)+\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}=\frac{\cos^{2}\left(\frac{u}{2}\right)-\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)+\sin^{2}\left(\frac{u}{2}\right)}=\cos^{2}\left(\frac{u}{2}\right)-\sin^{2}\left(\frac{u}{2}\right)$$ $$=\cos\left(\frac{2u}{2}\right)=\cos(u)$$ $$\frac{2t}{1+t^{2}}=\frac{2\tan\left(\frac{u}{2}\right)}{1+\tan^{2}\left(\frac{u}{2}\right)}=2\frac{\frac{\sin\left(\frac{u}{2}\right)}{\cos\left(\frac{u}{2}\right)}}{1+\frac{\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}=2\frac{\frac{\sin\left(\frac{u}{2}\right)}{\cos\left(\frac{u}{2}\right)}}{\frac{\cos^{2}\left(\frac{u}{2}\right)+\sin^{2}\left(\frac{u}{2}\right)}{\cos^{2}\left(\frac{u}{2}\right)}}=2\sin\left(\frac{u}{2}\right)\cos\left(\frac{u}{2}\right)=\sin\left(\frac{2u}{2}\right)=\sin(u)$$ donde $u\in[0,\pi]$. Al ser $$\left(\frac{1-t^{2}}{1+t^{2}}\right)^{2}+\left(\frac{2t}{1+t^{2}}\right)^{2}=\cos^{2}(u)+\sin^{2}(u)=1$$ se trata de una circunferencia de radio 1 con centro en el origen. $\blacksquare$
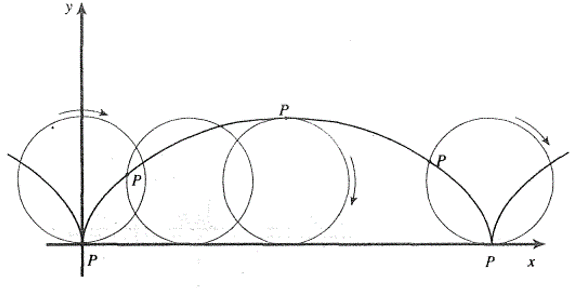
Ejemplo.Parametrización de la curva Cicloide.
Supongamos que un círculo de radio a rueda sin deslizarse a lo largo de una línea recta horizontal. Encuentre la curva descrita por un punto fijo P de su circunferencia.
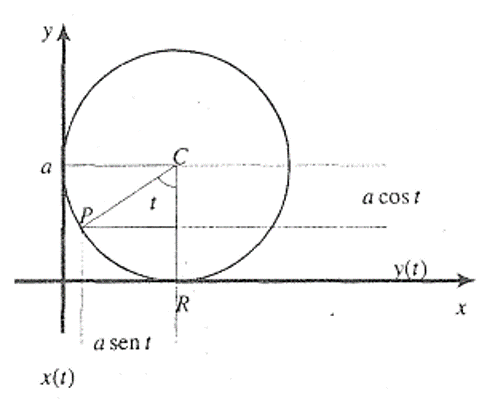
Sea t el ángulo en radianes, que forma (la línea que contiene) el radio CP con la línea CR.
Nótese que $OR$ es justamente la longitud de arco RP que es igual a $at$, de modo que el punto C tiene coordenadas $C=(at,a)$. Si $(x(t),y(t))$ denotan las coordenadas del punto p, se tiene
$$x(t)=at+a\sin(t)$$
$$y(t)=a+a\cos(t)$$
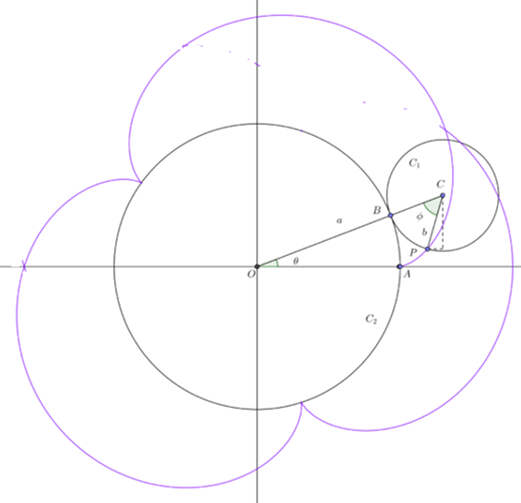
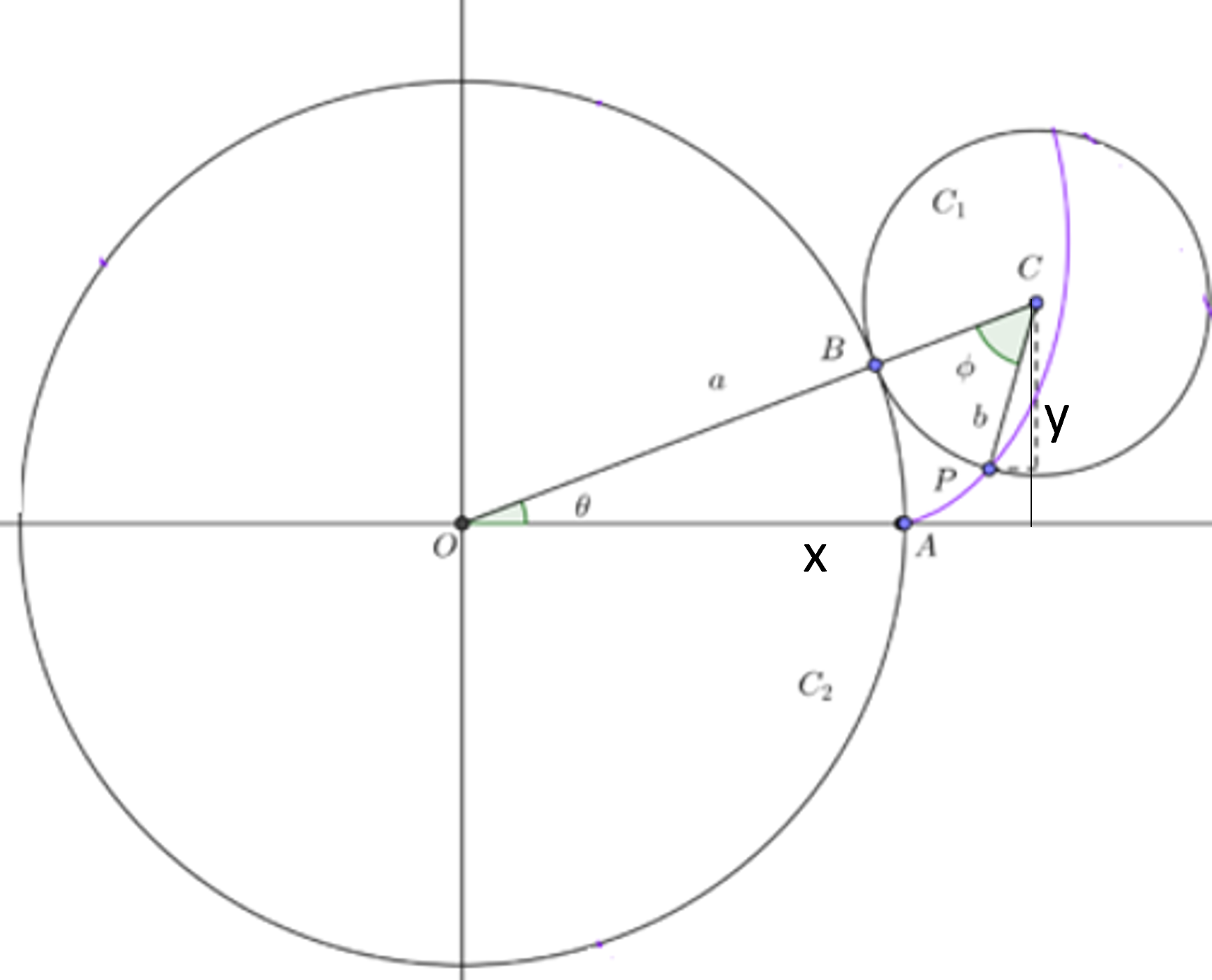
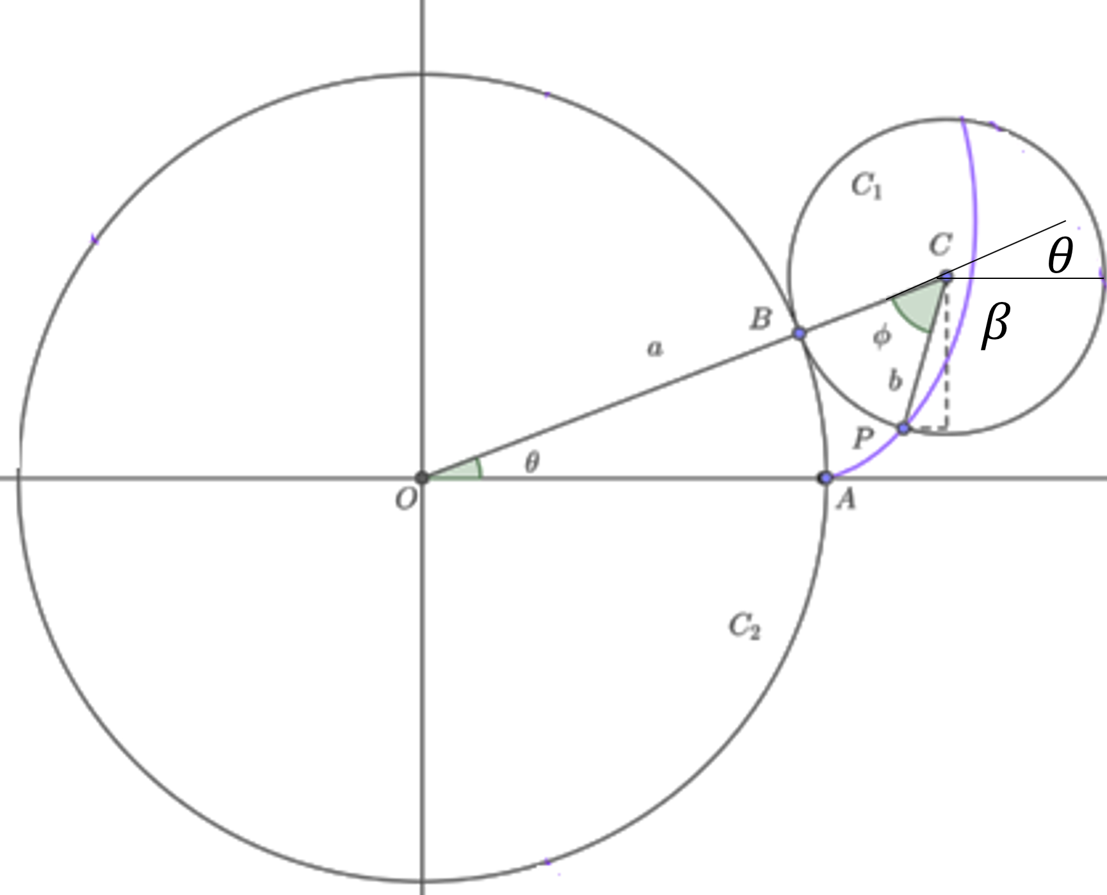
Por lo que la cicloide se puede representar por la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$f(t)=(at+a\sin(t),a+a\cos(t))$$ Si se despeja la variable t en la ecuación paramétrica, se obtendrá la forma cartesiana: $$x=a\arcsin\left(\frac{y}{a}-1\right)+\left(y-a\right)$$. $\blacksquare$ Ejemplo. Parametrización de la curva Epicicloide. Supongamos que un círculo de radio a rueda sin deslizarse sobre una circunferencia. Encuentre la curva descrita por un punto fijo $P$ de su circunferencia.
De acuerdo a la siguiente figura
\begin{align*}\cos(\theta) & =\frac{x_{c1}}{a+b}&\Rightarrow~x_{c1}=(a+b)\cos(\theta) \\sin(\theta) & =\frac{y_{c1}}{a+b}&\Rightarrow~y_{c1}=(a+b)\sin(\theta)\end{align*} También se tiene que el arco de circulo $C_{1}PB$ es igual al arco de circulo $C_{2}AB$ esto es $$a\theta=b\phi~\Rightarrow~\frac{a}{b}\theta=\phi$$ Ahora de acuerdo a la figura
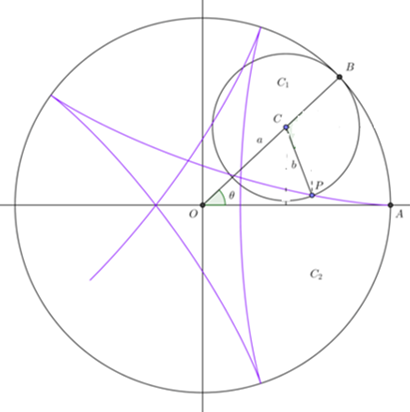
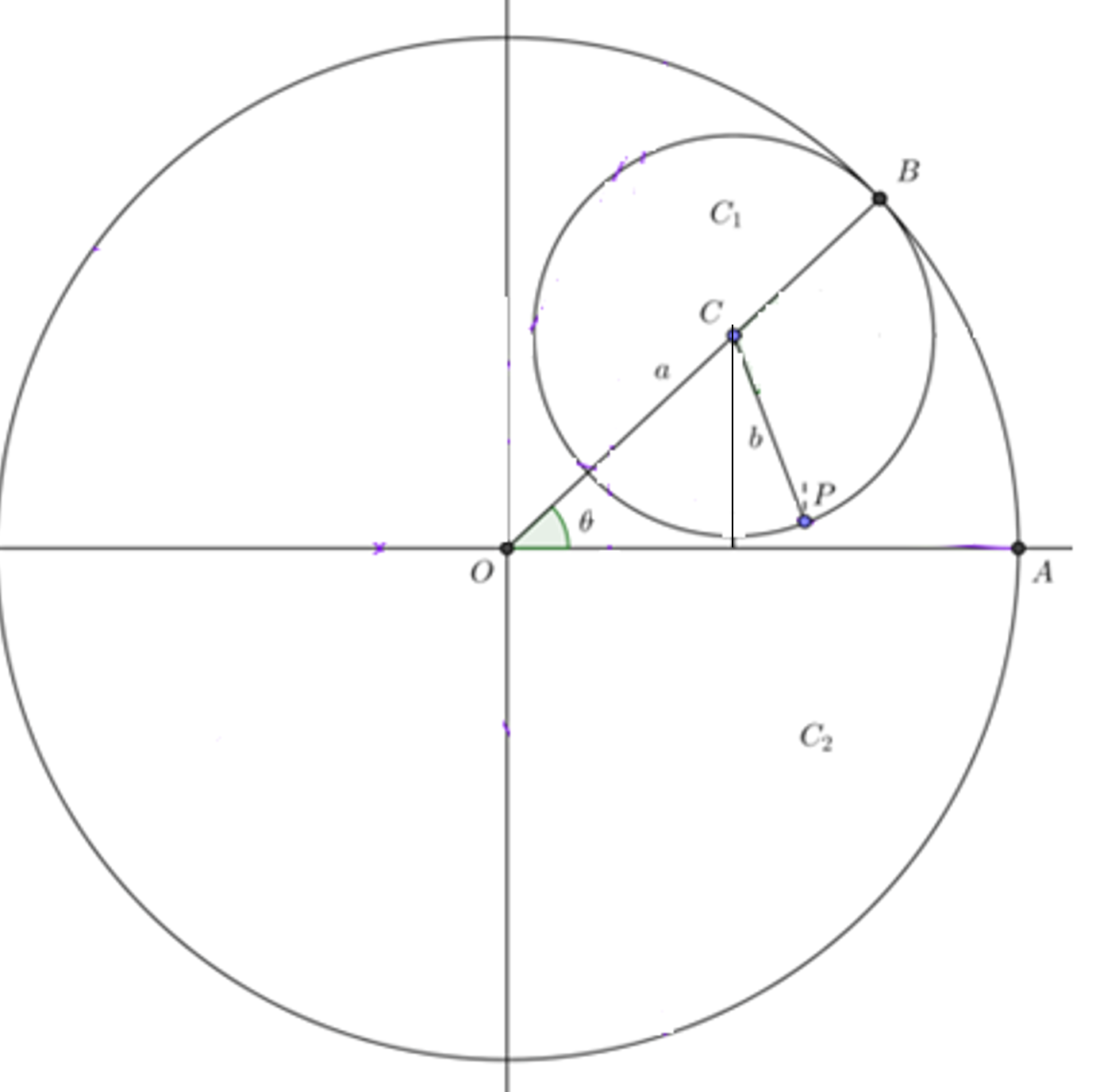
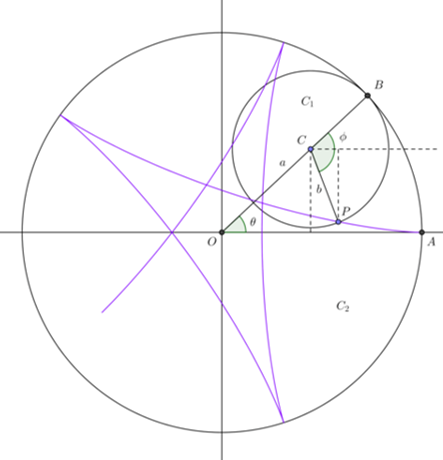
$$\theta+\phi-\beta=\pi~\Rightarrow~\beta=\pi-\theta+\phi$$ Por lo que usando que $\cos$ es par \begin{align*} P\in C_{1} &~\Leftrightarrow~P\in (b\cos(\beta),b\sin(\beta)) \\ &~\Leftrightarrow~P\in (b\cos(\theta+\phi-\pi),b\sin(\theta+\phi-\pi)) \\ &~\Leftrightarrow~P\in (-b\cos(\theta+\phi),-b\sin(\theta+\phi)) \end{align*} Utilizando todo lo anterior \begin{align*} x & =\left((a+b)\cos(\theta)-b\cos(\theta+\phi)\right) \\ y & =\left((a+b)\sin(\theta)-b\sin(\theta+\phi)\right) \end{align*} Como $\displaystyle{\frac{a}{b}\theta=\phi}$ tenemos \begin{align*} x & =\left((a+b)\cos(\theta)-b\cos\left(\theta+\frac{a}{b}\theta\right)\right) \\ y & =\left((a+b)\sin(\theta)-b\sin\left(\theta+\frac{a}{b}\theta\right)\right) \end{align*} Por lo que la Epicicloide se puede representar por la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$f(\theta)=\left((a+b)\cos(\theta)-b\cos\left(\theta+\frac{a}{b}\theta\right),(a+b)\sin(\theta)-b\sin\left(\theta+\frac{a}{b}\theta\right)\right)$$ $\blacksquare$ Ejemplo. Parametrización de la curva Hipocicloide. Una curva hipocicloide es la trayectoria descrita por un punto P situado sobre una circunferencia que rueda sin deslizar por el interior de otra circunferencia.
De acuerdo a la siguiente figura se tiene
\begin{align*} \cos(\theta) & =\frac{x}{a-b}&\Rightarrow~x=(a-b)\cos(\theta) \\sin(\theta) & =\frac{y}{a-b}&\Rightarrow~y=(a-b)\sin(\theta) \end{align*} También se tiene que el arco de circulo $C_{1}PB$ es igual al arco de circulo $C_{2}AB$ esto es $$a\theta=b\phi~\Rightarrow~\frac{a}{b}\theta=\phi$$ Ahora de acuerdo a la figura
$$\phi-\theta=\frac{a}{b}\theta-\theta$$ Utilizando todo lo anterior \begin{align*} x & =\left((a-b)\cos(\theta)+b\cos(\phi-\theta)\right) \ y & =\left((a+b)\sin(\theta)-b\sin(\phi-\theta)\right) \end{align*} Como $\displaystyle{\frac{a}{b}\theta=\phi}$ tenemos \begin{align*} x & =\left((a-b)\cos(\theta)+b\cos\left(\frac{a}{b}\theta-\theta\right)\right) \ y & =\left((a+b)\sin(\theta)-b\sin\left(\frac{a}{b}\theta-\theta\right)\right) \end{align*} Por lo que la Epicicloide se puede representar por la función $f:\mathbb{R}\rightarrow\mathbb{R}^{2}$ dada por $$f(\theta)=\left((a-b)\cos(\theta)+b\cos\left(\frac{a}{b}\theta-\theta\right),(a-b)\sin(\theta)-b\sin\left(\frac{a}{b}\theta-\theta\right)\right)$$. $\blacksquare$
Supongamos el espacio tridimensional $\mathbb{R}^{3}$ dotado del sistema de coordenadas $(x,y,z)$. Una curva C parametrizada en este espacio es la representación gráfica de una función vectorial: $$r(t)=(x(t),y(t),z(t))$$ donde t se denomina el parámetro de una curva, $t\in\mathbb{R}$. La estructura de la curva dependerá de las funciones $x(t), y(t)~ y~z(t)$. Ejemplo. Describa la curva definida por la función vectorial $r(t)=(1+t,2+5t,-1+6t)$.
En este caso las ecuaciones paramétricas correspondiente son, $x=1+t$, $y=2+5t$, $z=1+6t$ o sea $r(t)=(1,2,-1)+t(1,5,6)$ se trata de una recta que pasa por $(1,2,-1)$ y es paralela a $(1,5,6)$.$\blacksquare$
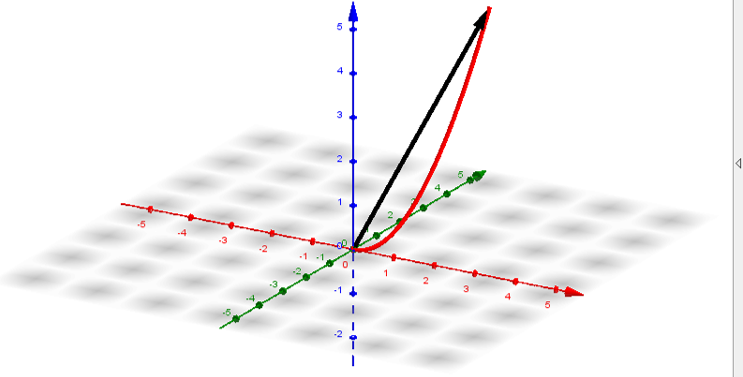
Ejemplo. Dibuje la curva cuya ecuación vectorial es $r(t)=2\cos ti+\sin tj+tk$. En este caso, las ecuaciones paramétricas para esta curva son, $x=2\cos t$, $y=\sin t$, $z=t$, por lo que $\displaystyle{x/2=\cos t}$ $\therefore$ $\qquad$ $\displaystyle{\left(\frac{x}{2}\right)^{2}+y^{2}=1}$ la curva se encuentra en el cilindro elíptico $\displaystyle{\left(\frac{x^{2}}{4}\right)^{2}+y^{2}=1}$. Ya que $z=t$ la curva forma una espiral ascendente alrededor del cilindro conforme $t$ se incrementa
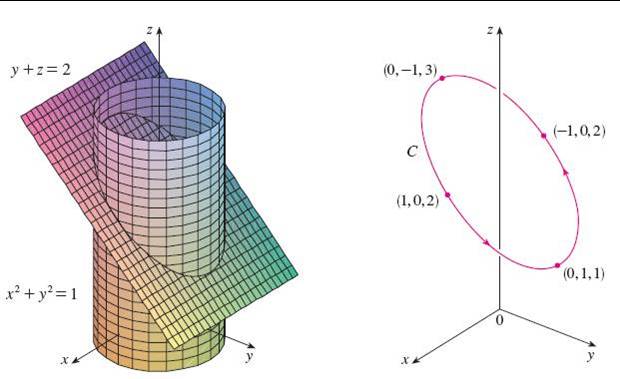
Ejemplo. Halle una función vectorial que represente la curva de la intersección del cilindro $x^{2}+y^{2}=1$ y el plano $y+z=2$. En este caso la figura muestra la forma en que se cruzan, el plano y el cilindro, así mismo la figura ilustra la curva de intersección.
La proyección $C$ sobre el plano $xy$ es el circulo $x^{2}+y^{2}=1$, $z=0$, que podemos parametrizar como $x=\cos t$, $y=\sin t$, $0\leq t \leq 2\pi$, con base en la ecuacion del plano, tenemos que $$z=2-y=2-\sin t$$ $\therefore~~~x=\cos t,~~y=\sin t,~~z=2-\sin t,~~~0\leq t \leq 2\pi$ $\therefore$ la ecuación vectorial correspondiente es $$r(t)=\cos ti+\sin tj+(2-\sin t)k \qquad 0\leq t \leq 2\pi$$ $\blacksquare$
Dominio de la Función Vectorial
El dominio de una función vectorial $r(t)$ es el conjunto de valores permitidos de $t$. Si $r(t)$ se define en términos de las funciones de las componentes y no se especifica explícitamente el dominio, entonces se sobreentiende que el dominio es la intersección de los dominios naturales de las funciones de las componentes, por lo que éste recibe el nombre de dominio natural de $r(t)$. Sea $f(t)=(x_{1}(t)),x_{2}(t)),…,x_{n}(t))~\in\mathbb{R}^{n}$ entonces el $\displaystyle{Dom_{f}=\bigcap_{i=1}^{n} Dom_{x_{i}}}$
Ejemplo. Halle el dominio de la función vectorial $$f(t)=\left(t^{2},\sqrt{t-1},\sqrt{5-t}\right)$$
tenemos que \[Si\quad x_{1}(t)=t^{2}\quad entonces\quad \textit{Dom} (x_{1}(t))=\{\mathbb{R}\}\] \[Si\quad x_{2}(t)=\sqrt{t-1}\quad entonces\quad \textit{Dom} (x_{2}(t))=\{t\in\mathbb{R}~|~t\geq1\}\] \[Si\quad x_{3}(t)=\sqrt{5-t}\quad entonces\quad \textit{Dom} (x_{3}(t))=\{t\in\mathbb{R}~|~5\geq t\}\] Por lo tanto \[\textit{Dom} (f(t))=\bigcap{\textit{Dom} (x_{1}(t)),\textit{Dom} (x_{2}(t)),\textit{Dom} (x_{3}(t))}=\{t\in\mathbb{R}~|~1~\leq t~\leq 5\} \]. $\blacksquare$
Halle el dominio de la función vectorial $$f(t)=\left(Ln(t),\frac{t}{t-1},e^{-t}\right)$$
tenemos que \[Si\quad x_{1}(t)=Ln(t)\quad entonces\quad \textit{Dom} (x_{1}(t))=\{t\in\mathbb{R}|0<t\}\] \[Si\quad x_{2}(t)=\frac{t}{t-1}\quad entonces\quad \textit{Dom} (x_{2}(t))=\{t\in\mathbb{R}|1\neq t\}\] \[Si\quad x_{3}(t)=e^{-t}\quad entonces\quad \textit{Dom} (x_{3}(t))=\{\mathbb{R}\}\] Por lo tanto \[\textit{Dom} (f(t))=\bigcap{\textit{Dom} (x_{1}(t)),\textit{Dom} (x_{2}(t)),\textit{Dom} (x_{3}(t))}=\{t\in\mathbb{R}~|~0< t,\quad t\neq1\} \].$$\blacksquare$$
Graficar funciones con valores vectoriales
Recuerda que un vector plano consta de dos cantidades: dirección y magnitud. Dado cualquier punto en el plano (el punto inicial), si nos movemos en una dirección específica por una distancia específica, llegamos a un segundo punto. Esto representa el punto final de el vector. Calculamos las componentes del vector restando las coordenadas del punto inicial a las coordenadas del punto terminal. Se considera que un vector está en posición estándar si el punto inicial se encuentra en el origen. Al graficar un valor vectorial, por lo general, representamos gráficamente los vectores en el dominio de la función en la posición estándar, porque hacerlo garantiza la unicidad de la gráfica. Esta convención se aplica también a las gráficas de funciones vectoriales tridimensionales. La gráfica de una función vectorial de la forma $r(t)=f(t)i+g(t)j$ consiste en el conjunto de todos $(t,r(t))$, y la ruta que traza se llama curva plana.
La gráfica de una función vectorial de la forma $r(t) = f(t)i + g(t)j + h(t)k$ consiste en el conjunto de todos $(t, r(t))$, y el camino que traza se llama curva espacial.
Cualquier representación de una curva plana o una curva espacial utilizando un valor vectorial se denomina parametrización vectorial de la curva.
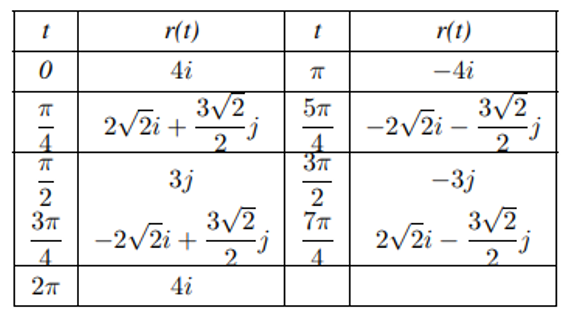
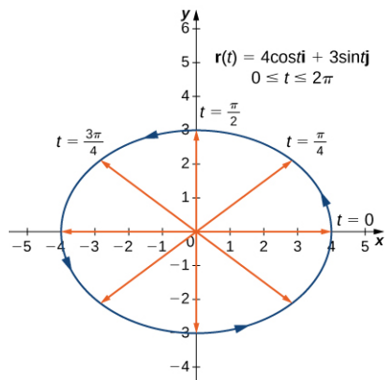
Ejemplo. Cree una gráfica de la siguiente funcion con valores vectoriales: $$r(t)=4\cos(t)i+3\sin(t)j,~~~0\leq t\leq 2\pi$$
Como con cualquier gráfico, comenzamos con una tabla de valores. Luego graficamos cada uno de los vectores en la segunda columna en posición estándar y conectamos los puntos terminales de cada vector para formar una curva. Esta curva resulta ser una elipse centrada en el origen.
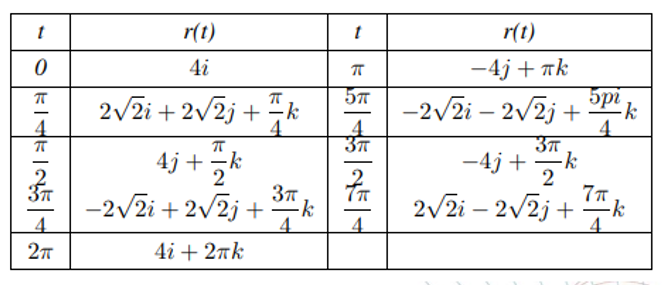
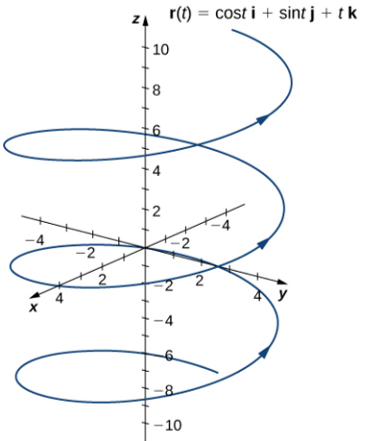
Ejemplo. Cree una gráfica de la siguiente funcion con valores vectoriales: $$r(t)=\cos(t)i+\sin(t)j+tk,~~~0\leq t\leq 4\pi$$
Realizamos el mismo procedimiento para una función vectorial tridimensional.
Los valores luego se repiten, excepto por el hecho de que el coeficiente de k siempre es creciente. Esta curva se llama hélice. Observe que si se elimina la componente k, entonces la función se convierte en $r(t)=\cos(t)i+\sin(t)j$, que es un círculo unitario centrado en el origen.
Operaciones con Funciones Vectoriales
Las operaciones usuales del algebra vectorial pueden aplicarse para combinar 2 funciones o una función vectorial con una función real.
Si $f$ y $g$ son funciones vectoriales y si $u$ es una función real, teniendo todas un dominio común, definimos nuevas funciones $F+G$, $uF$ y $F\cdot G$ mediante \begin{align*} (F+G)(t)&=F(t)+G(t)\\ u~F(t)&=u(t)~F(t)\\ (F\cdot G) (t)&= F(t)\cdot G(t)\\ (F\times G )(t)&=F(t)\times G(t)~si~F,G\in \mathbb{R}^{3} \end{align*}
Más adelante
Una vez definido el concepto de función vectorial vamos a aprender a calcular el límite de estas funciones. Cuando calculamos el límite de una sola variable basta que coincidan los límites laterales para saber que existe, pero cuando lo hacemos en más dimensiones tenemos más direcciones de aproximación.
Tarea moral
Recuerda que puedes apoyarte de la siguiente liga que contiene una gema en Gemini para la resolución de los problemas de este curso:
1.- Sobre la parte exterior de una circunferencia fija de radio a rueda (sin resbalar) otra circunferencia de radio b. Encuentre una función de $\mathbb{R}$ en $\mathbb{R}^{2}$ que describa el movimiento de un punto que se encuentre en la cicunferencia exterior.
2.- Sea $R \subset \mathbb{R}^{2}$ la recta cuya ecuación cartesiana es $ax+by+c=0$ (con $a^2+b^2>0$). Muestra que si $\overline{x_0}=(x_0,y_0)$ y $\overline{x_1}=(x_1,y_1)$ son dos puntos diferentes que pertenecen a $\mathbb{R}$ entonces la función $f(t): \mathbb{R} \rightarrow \mathbb{R^2}$ dada por $f(t)= \overline{x_0} +t( \overline{x_1}- \overline{x_0})$ es una parametrización de $R$
3.- Halla el dominio de la siguiente función vectorial $f:\mathbb{R}\rightarrow \mathbb{R^3}$ donde $f(t)=(t^2, ln(t-2), \sqrt{4-t})$
4.- Dadas las funciones vectoriales $f(t)=(1+t,t^2)$, $g(t)=(t, t^3)$ halla $(fg)(t)$
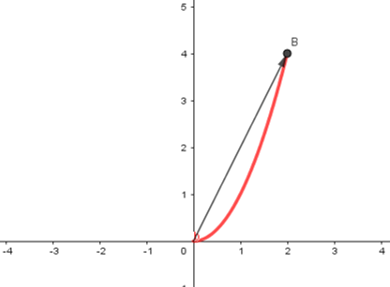
5.- Crea la gráfica de la siguiente función vectorial $r(t)=(t^2-1)i+(2t-3)j$, $0 \leq t \leq 3$
Enlaces
En el siguiente enlace podrás conocer algunas curvas paramétricas famosas
En esta entrada probaremos que dados dos conjuntos $A$ y $B$, tales que $A\preceq B$ y $B\preceq A$, entonces $A\sim B$. Si bien este resultado es muy intuitivo, matemáticamente hay algunas complicaciones. Las hipótesis nos dan funciones inyectivas de $A$ en $B$ y de $B$ en $A$. Pero necesitamos una única función de $A$ en $B$ que sea biyectiva. ¿Cómo garantizamos la existencia de la segunda a partir de las primeras?
Lema del punto fijo
Primero demostraremos un lema sobre la existencia de un punto fijo, el cual será de utilidad en la demostración del teorema de Cantor-Schröder-Bernstein. Este lema nos dice que dada una función de $\mathcal{P}(X)$ en sí mismo con cierta propiedad de monotonía, ésta cumple que debe fijar a algún elemento de $\mathcal{P}(X)$. Veamos la definición de monotonía que necesitamos.
Definición. Sea $f:\mathcal{P}(X)\to \mathcal{P}(X)$. Diremos que $f$ es una función monótona si siempre que $A\subseteq A’\subseteq X$, se cumple que $f(A)\subseteq f(A’)$. Es decir, se preserva la contención bajo $f$.
Ejemplo.
Sea $X=\set{\emptyset, \set{\emptyset}}$ y sea $f=\set{(\emptyset,\emptyset), (\set{\emptyset}, \set{\emptyset}), (\set{\set{\emptyset}}, \emptyset), (\set{\emptyset, \set{\emptyset}},\set{\emptyset})}$. Consideremos $A=\emptyset$ y $A’=\set{\emptyset}$. Tenemos que $f(A)=\emptyset$ y $f(A’)=\set{\emptyset}$, de modo que $f(A)\subseteq f(A’)$. Para cualquier otra elección de $A$ y $A’$ con $A\subseteq A’$ también se puede verificar que $f(A)\subseteq f(A’)$. Por ello, decimos que $f$ es monótona.
$\square$
Lema. Sea $\varphi:\mathcal{P}(X)\to \mathcal{P}(X)$ función monótona. Entonces existe $E\subseteq X$ tal que $\varphi(E)=E$, es decir, $\varphi$ deja fijo a algún elemento de $\mathcal{P}(X)$.
Veremos que $\mathcal{L}\not= \emptyset$. Para ello, probaremos que $X\in \mathcal{L}$. Para empezar, $X\in \mathcal{P}(X)$ pues para cualquier conjunto $X$, $X\subseteq X$. Además, se tiene que $\varphi(X)\in \mathcal{P}(X)$, por lo que $\varphi(X)\subseteq X$.
Como $\mathcal{L}$ no es vacío, podemos considerar $E=\bigcap \mathcal{L}$. Veremos que $\varphi(E)=E$, lo cual mostaremos viendo la doble contención.
$\subseteq$) Sea $K\in \mathcal{L}$. Tenemos que $E\subseteq K$. Como $\varphi$ es monotona, entonces $\varphi(E)\subseteq \varphi(K)$. Además, como $K\in \mathcal{L}$ se tiene que $\varphi(K)\subseteq K$ y por transitividad de la contención se tiene que $\varphi(E)\subseteq K$. Como esto sucede para cualquier $K\in \mathcal{L}$, se cumple entonces $\varphi(E)\subseteq E$.
$\supseteq$) Dado que $\varphi(E)\subseteq E$ y $\varphi$ es monótona se tiene que $\varphi(\varphi(E))\subseteq \varphi(E)$. Por ello, $\varphi(E)\in \mathcal{L}$ y por lo tanto, $E\subseteq \varphi(E)$.
Antes de demostrar el teorema de Cantor-Schröder-Bernstein, enunciemos los siguientes recordatorios que usaremos en la demostración:
Recordatorio 1. Si $f:X\to Y$ es una función y se tiene $Z\subseteq Z’\subseteq X$, entonces $f[Z]\subseteq f[Z’]$.
Recordatorio 2. Sean $A,B\subseteq X$. Si $A\subseteq B$, entonces $X\setminus B\subseteq X\setminus A$.
Teorema (Cantor-Schröder-Bernstein). Si $A\preceq B$ y $B\preceq A$, entonces $A\sim B$.
Demostración:
Supongamos que $A\preceq B$ y $B\preceq A$, esto es, existe $f:A\to B$ inyectiva y existe $g:B\to A$ inyectiva.
Sea $\varphi:\mathcal{P}(A)\to \mathcal{P}(A)$ dada por $\varphi(X)=A\setminus g[B\setminus f[X]]$. Veamos que $\varphi$ es monótona.
Sean $X,X’\in \mathcal{P}(A)$ tales que $X\subseteq X’$, por el recordatorio $1$, tenemos que $f[X]\subseteq f[X´]$, luego por el recordatorio 2 tenemos que $B\setminus f[X’]\subseteq B\setminus f[X]$. Luego, por el recordatorio 1 $g[B\setminus f[X’]]\subseteq g[B\setminus f[X]]$. Finalmente, por el recordatorio $2$ se tiene que $A\setminus g[B\setminus f[X]]\subseteq A\setminus g[B\setminus f[X’]]$. Por lo tanto, $\varphi(X)\subseteq \varphi(X’)$ y así, $\varphi$ es monótona.
Luego, por el lema del punto fijo tenemos que existe $E\in \mathcal{P}(X)$ tal que $\varphi(E)=E$. De este modo:
Consideremos $g_1=g\upharpoonright_{B\setminus f[E]}: B\setminus f[E]\to g[B\setminus f[E]]$. Dado que $g$ es inyectiva, entonces $g_1$ es biyectiva y por lo tanto, $g_1^{-1}$ es función.
Definimos $h:A\to B$ como:
$h(x)= \left\{ \begin{array}{lcc} f(x) & si & x\in E \\ \\ g_1^{-1}(x) & si & x\in A\setminus E= g[B\setminus f[E]] \end{array} \right. $
Veamos que $h$ es biyectiva.
Primero veamos que $h$ es inyectiva. Sean $x,x’\in A$ tales que $x\not=x’$, veamos que $h(x)\not= h(x’)$.
Caso 1: Si $x, x’\in E$, entonces $h(x)=f(x)\not= f(x’)=h(x’)$ pues $f$ es inyectiva.
Caso 2: Si $x, x’\in A\setminus E$, entonces $h(x)=g_1^{-1}(x)\not=g_1^{-1}(x’)=h(x)$ pues $g_1^{-1}$ es inyectiva.
Caso 3: Si $x\in E$ y $x’\in A\setminus E$, entonces $h(x)=f(x)\in f[E]$ y $h(x’)=g_1^{-1}(x’)\in B\setminus f[E]$, por lo que $h(x)\not= h(x’)$.
Por lo tanto, $h$ es inyectiva.
Ahora, veamos que $h$ es suprayectiva. Consideremos $B$ como $B= (B\setminus f[E])\cup f[E]$.
Sea $y\in B$, entonces $y\in B\setminus f[E]$ o $y\in f[E]$.
Caso 1: Si $y\in B\setminus f[E]$, entonces $g(y)\in g[B\setminus g[E]]$, por lo que $h(g(y))= g_1^{-1}(g(y))= y$.
Caso 2: Si $y\in f[E]$ existe $e\in E$ tal que $f(e)=y$. Así, $h(e)=f(e)=y$.
Por lo tanto, $h$ es suprayectiva.
Concluimos que $h$ es biyectiva y así, $A\sim B$.
$\square$
Tarea moral
La siguiente lista de ejercicios te permitirá reforzar el contenido visto en esta entrada:
Definamos al conjunto de números pares como $P=\set{2k:\ k\in \mathbb{N}}$. En la entrada anterior ya vimos que $P\sim \mathbb{N}$. Da una demostración alternativa a esto usando el teorema de Cantor-Schröder-Bernstein.
Resuelve los siguientes incisos.
Muestra la función $f:\mathbb{N}\to \mathbb{N}\times \mathbb{N}$ dada por $f(x)=(x,1)$ es inyectiva, pero no suprayectiva.
Muestra que la función $g:\mathbb{N}\times \mathbb{N}\to \mathbb{N}$ dada por $g(a,b)=2^a3^b$ es inyectiva, pero no suprayectiva.
¿Qué dice entonces el teorema de Cantor-Schröder-Bernstein sobre $\mathbb{N}$ y $\mathbb{N}\times \mathbb{N}$?
¿Es sencillo dar una función biyectiva explícita $h:\mathbb{N}\to \mathbb{N}\times \mathbb{N}$?
Más adelante…
En la siguiente entrada definiremos qué es un conjunto finito y hablaremos un poco acerca de lo que entenderemos por cardinal de un conjunto. Daremos los primeros pasos para hablar de conjuntos infinitos. Ya platicamos un poco que intuitivamente $\mathbb{N}$ debe serlo, pero tenemos que probarlo formalmente. Un poco más adelante, veremos que hay conjuntos infinitos que no tienen la misma cardinalidad. Así, nos interesará ver que pasa con las cardinalidades de estos conjuntos.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
Puedes consultar una demostración diferente del teorema de Cantor-Schröder-Bernstein en el siguiente libro: K. Hrbacek, T. Jech, Introduction to Set Theory, Third Edition, Marcel Dekker Inc., 1999, pp. 66-68. Y una segunda demostración diferente en: J.A. Amor Montaño, Teoría de conjuntos para estudiantes de ciencias, Segunda edición, Coordinación de Servicios Editoriales, Facultad de Ciencias UNAM, 2005, pp. 79-80 ↩︎
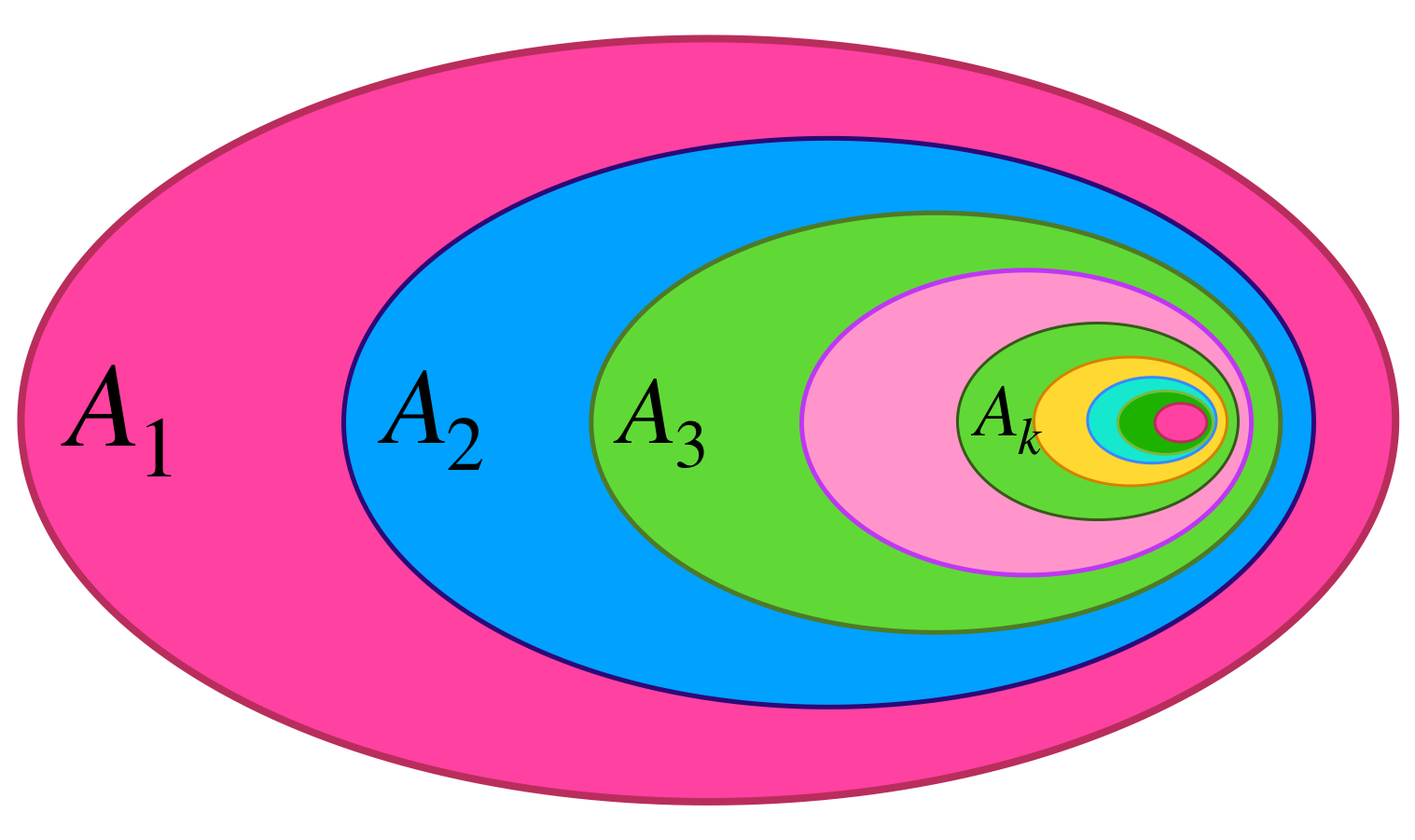
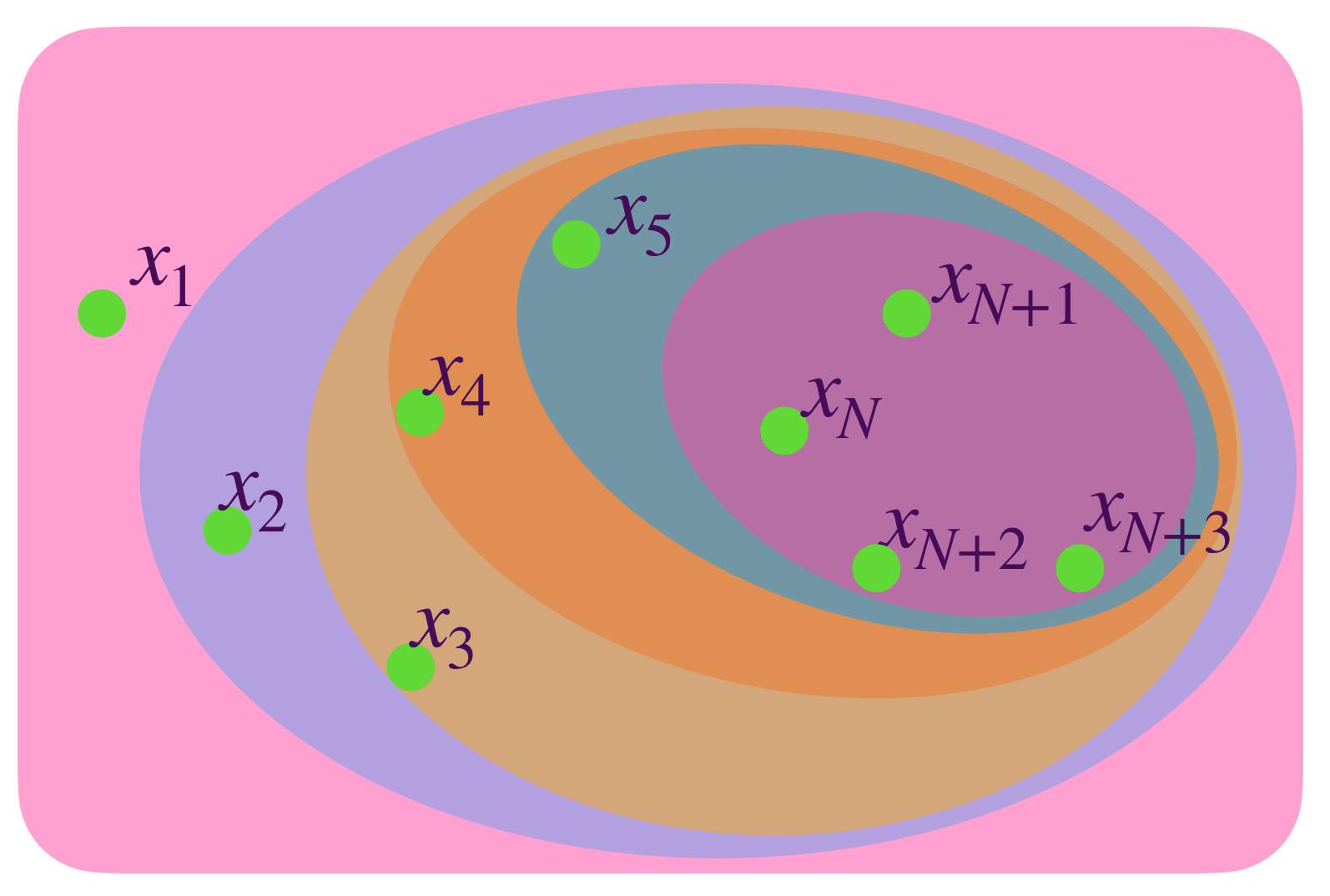
En esta ocasión nos vamos a fijar en colecciones de conjuntos que están contenidos unos en otros. Vamos a suponer que es una cantidad numerable de conjuntos. El primer conjunto contiene al segundo, que a su vez contiene a un tercero y así, sucesivamente.
Representación de conjuntos donde el siguiente está contenido en el anterior.
Ahora pensemos en la intersección de todos esos conjuntos. Intuitivamente podemos visualizar que se tratará de un conjunto muy pequeño, que estará contenido en todos los demás.
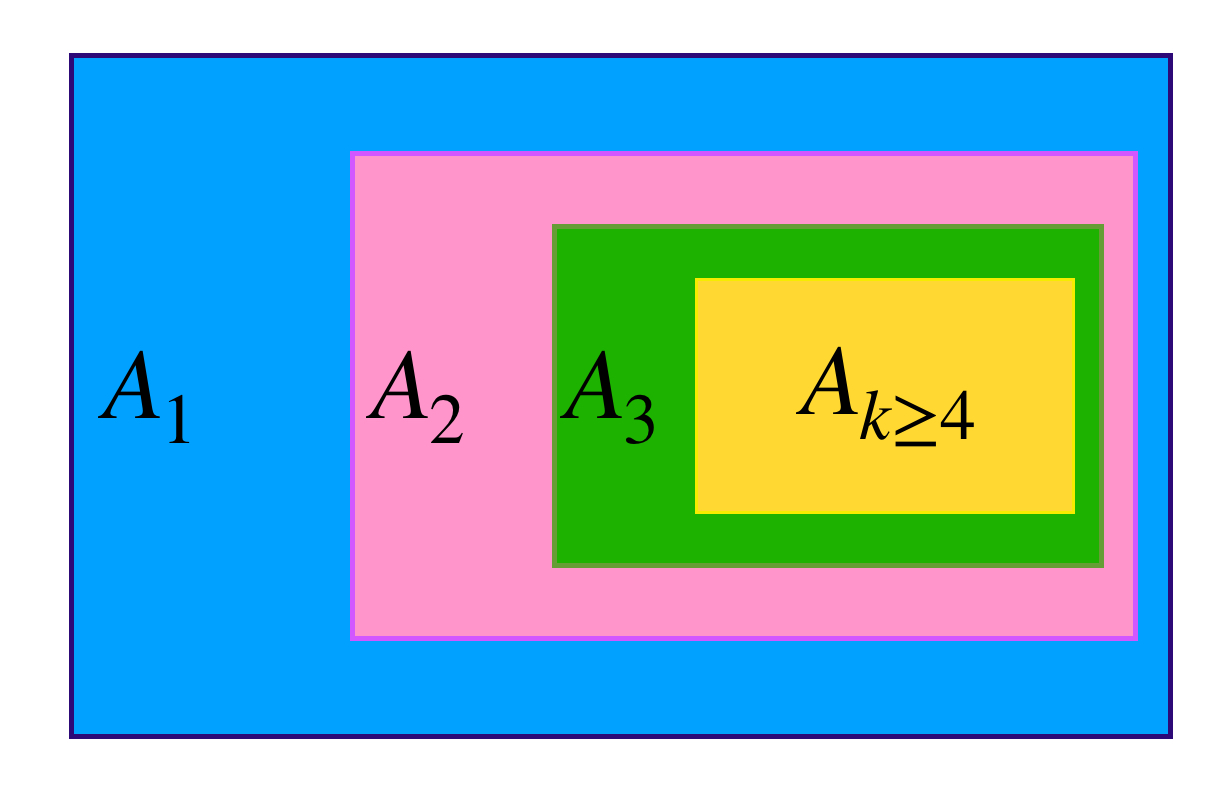
Aquí tenemos un ejemplo de una sucesión de conjuntos donde los últimos términos corresponden al mismo conjunto. La intersección de todos los conjuntos es, evidentemente, ese último conjunto
Para todo $k \geq 4, \, A_k = A_4$.
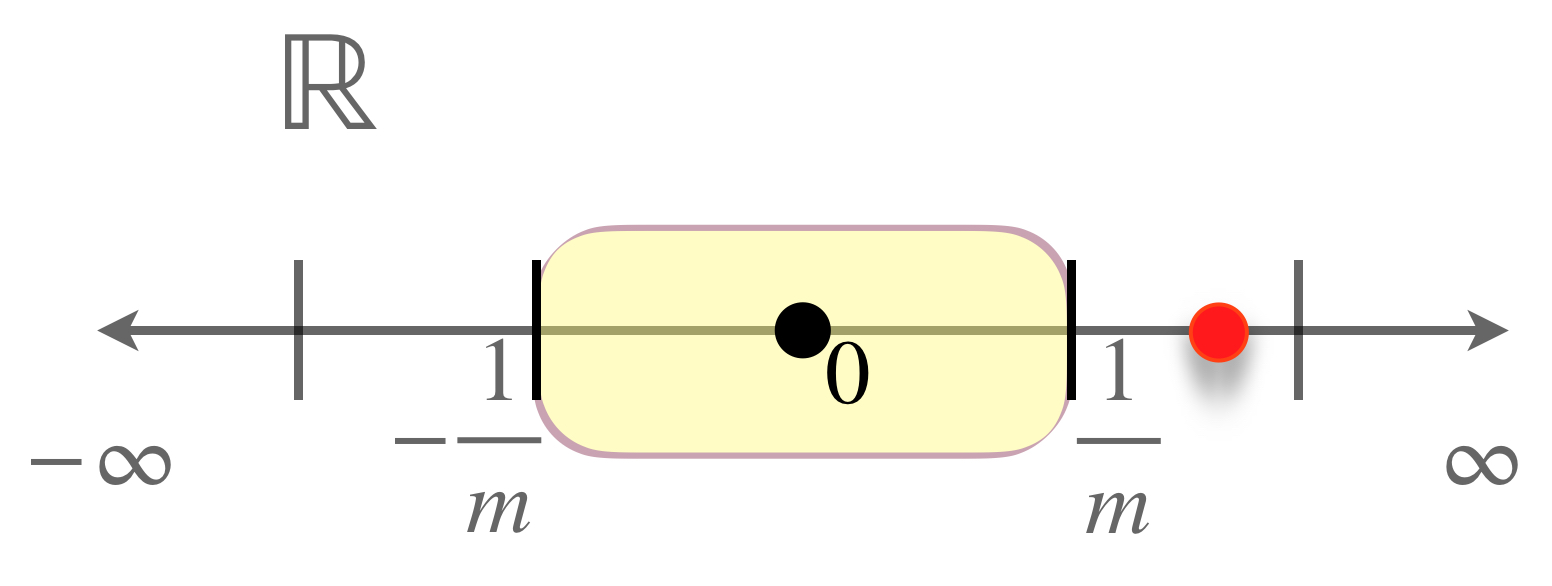
Observemos la sucesión de intervalos $[-\frac{1}{n},\frac{1}{n}]_{n \in \mathbb{N}}.$
Intervalo $[-\frac{1}{k},\frac{1}{k}]$ con $k \in \mathbb{N}$.
Nota que todos tienen como elemento al cero. Además es el único elemento que pertenece a la intersección de todos los intervalos, pues si suponemos que hay otro más, dado que $\frac{1}{n} \to 0$ es posible encontrar un intervalo suficientemente pequeño, que deje fuera este elemento.
Con un radio menor a la distancia entre $0$ y el punto rojo, este último queda fuera.
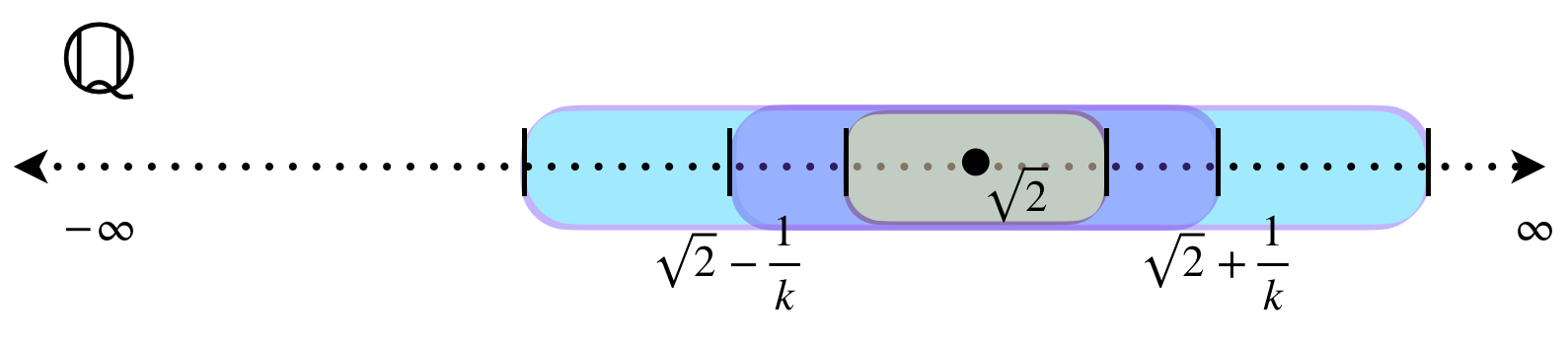
Ahora consideremos el subespacio $\mathbb{Q}$ con la métrica usual. En esta ocasión los intervalos serán $(\sqrt{2}-\frac{1}{n},\sqrt{2}+\frac{1}{n}), \, n \in \mathbb{N}.$ Queda como ejercicio al lector demostrar que la intersección de estos conjuntos es vacía en $\mathbb{Q}.$
Intervalo $(\sqrt{2}-\frac{1}{k},\sqrt{2}+\frac{1}{k})$ con $k \in \mathbb{N}$.
Entonces, ¿bajo qué condiciones podremos asegurar que la intersección no es vacía pese a que los conjuntos se hagan «cada vez más pequeños» y estén contenidos unos en otros? Veamos la siguiente definición:
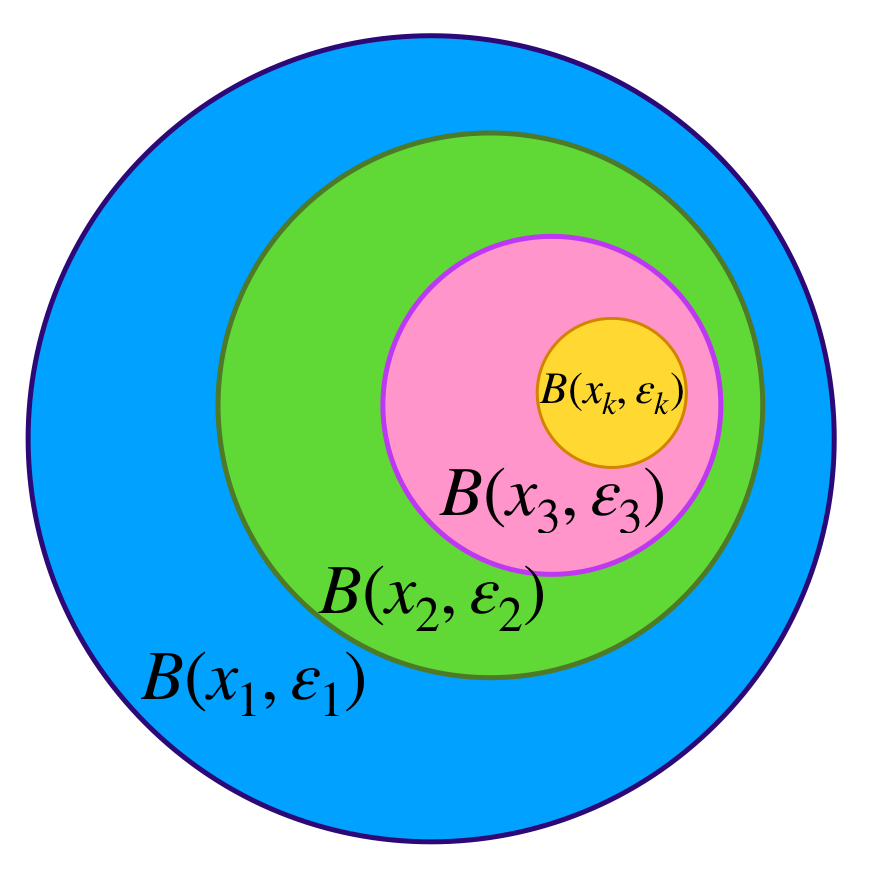
Definición. Bolas encajadas. Sea $(X,d)$ un espacio métrico y $(\overline{B}(x_n,\varepsilon_n))_{n \in \mathbb{N}} \,$ una sucesión de bolas cerradas en $X.$ Si para toda $ n \in \mathbb{N}$ se cumple que $\overline{B}(x_{n+1},\varepsilon_{n+1}) \subset \overline{B}(x_{n},\varepsilon_{n})$ diremos que la sucesión $(\overline{B}(x_n,\varepsilon_n))_{n \in \mathbb{N}} \,$ es de bolas encajadas.
Sucesión de bolas cerradas encajadas.
Proposición. Principio de bolas encajadas. $(X,d)$ es un espacio métrico completo si y solo si para cualquier sucesión de bolas cerradas encajadas $(\overline{B}(x_n,\varepsilon_n))_{n \in \mathbb{N}} \,$ cuyos radios tienden a cero, es decir $\varepsilon_n \to 0,$ se cumple que la intersección de todas las bolas cerradas es no vacía. Además $\underset{n \in \mathbb{N}}{\cap} \, \overline{B}(x_n,\varepsilon_n) = \{x\}$ para algún $x \in X.$
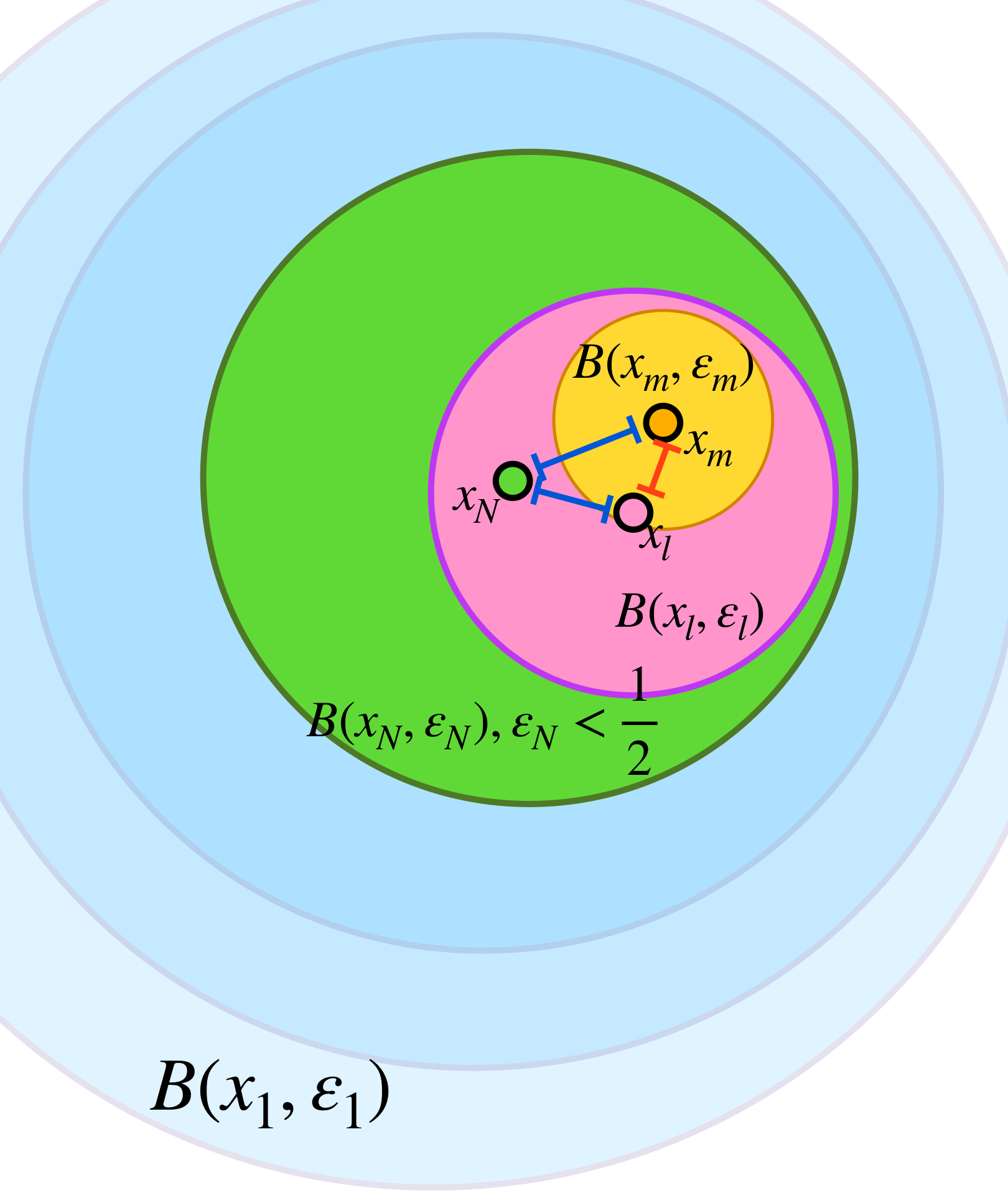
Demostración: Supongamos que $(X,d)$ es completo. Sea $(\overline{B}(x_n,\varepsilon_n))_{n \in \mathbb{N}} \,$ una sucesión de bolas encajadas cuyos radios tienden a cero. Vamos a probar primero que la sucesión de los centros de las bolas cerradas $(x_n)_{n \in \mathbb{N}} \,$ es de Cauchy. Sea $\varepsilon > 0,$ como $\varepsilon_n \to 0,$ existe $N \in \mathbb{N}$ tal que para toda $ \, n \geq N, \, \varepsilon_n < \frac{\varepsilon}{2}.$ Como la sucesión es de bolas encajadas, tenemos que para cada $ \, l,m \geq N, \, \overline{B}(x_l,\varepsilon_l) \subset \overline{B}(x_N,\varepsilon_N)$ y $\overline{B}(x_m,\varepsilon_m) \subset \overline{B}(x_N,\varepsilon_N)$ entonces $d(x_l,x_m) \leq d(x_l,x_N) + d(x_N,x_m) < \frac{\varepsilon}{2}+\frac{\varepsilon}{2}=\varepsilon.$ Por lo tanto $(x_n)$ es de Cauchy. Como $X$ es completo, se sigue que $x_n \to x$ para algún $x \in X.$
La sucesión de centros es de Cauchy.
Vamos a demostrar que $x \in \underset{n \in \mathbb{N}}{\cap} \, \overline{B}(x_n,\varepsilon_n).$ Sea $n \in \mathbb{N}.$ Como las bolas son encajadas, tenemos que para toda $ k \geq n, \, \overline{B}(x_k,\varepsilon_k) \subset \overline{B}(x_n,\varepsilon_n)$ en consecuencia para toda $ k \geq n,$ el término de la sucesión $x_k$ es elemento de $\overline{B}(x_n,\varepsilon_n),$ que es un conjunto cerrado. Ya que la subsucesión formada por estos últimos términos converge en $x$ se sigue de lo que vimos en Convergencia que $x \in \overline{B}(x_n,\varepsilon_n).$ Como esto ocurre para cada $ n \in \mathbb{N},$ concluimos que $x \in \underset{n \in \mathbb{N}}{\cap} \, \overline{B}(x_n,\varepsilon_n).$
Además $x$ es el único punto en la intersección, pues si existe otro punto $x’ \in \underset{n \in \mathbb{N}}{\cap} \, \overline{B}(x_n,\varepsilon_n)$ existen también bolas cerradas suficientemente pequeñas que no contienen a ambos puntos. La demostración de este hecho se deja como ejercicio.
Se puede elegir un radio tan pequeño que la bola no tendría ambos puntos.
Para el regreso buscamos demostrar que $(X,d)$ es completo. Sea $(x_n)_{n \in \mathbb{N}} \,$ una sucesión de Cauchy.
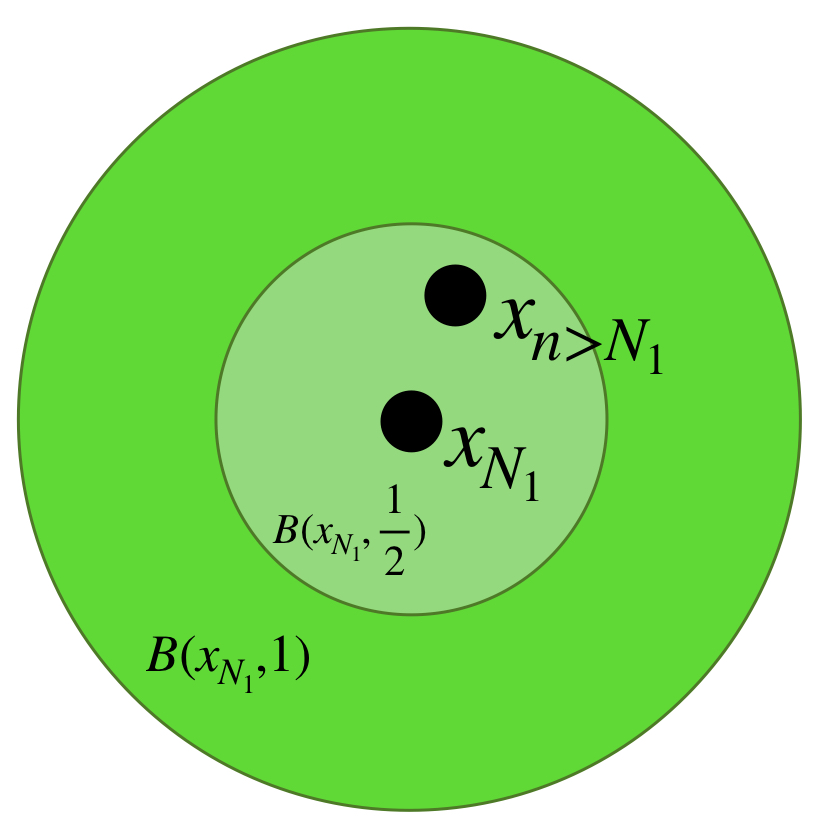
Vamos a construir una sucesión de bolas encajadas de la siguiente forma: Ya que la sucesión $(x_n)$ es de Cauchy, podemos afirmar que existe $N_1 \in \mathbb{N}$ tal que para cada $ \, n,m \geq N_1, \, d(x_n,x_m) < \frac{1}{2}.$ Entonces para toda $ \, n \geq N_1, \, x_n \in \overline{B}(x_{N_1}, \frac{1}{2}) \subset \overline{B}(x_{N_1},1).$
Bola con centro en $x_{N_1}$ que tiene todos los términos siguientes de $(x_n).$
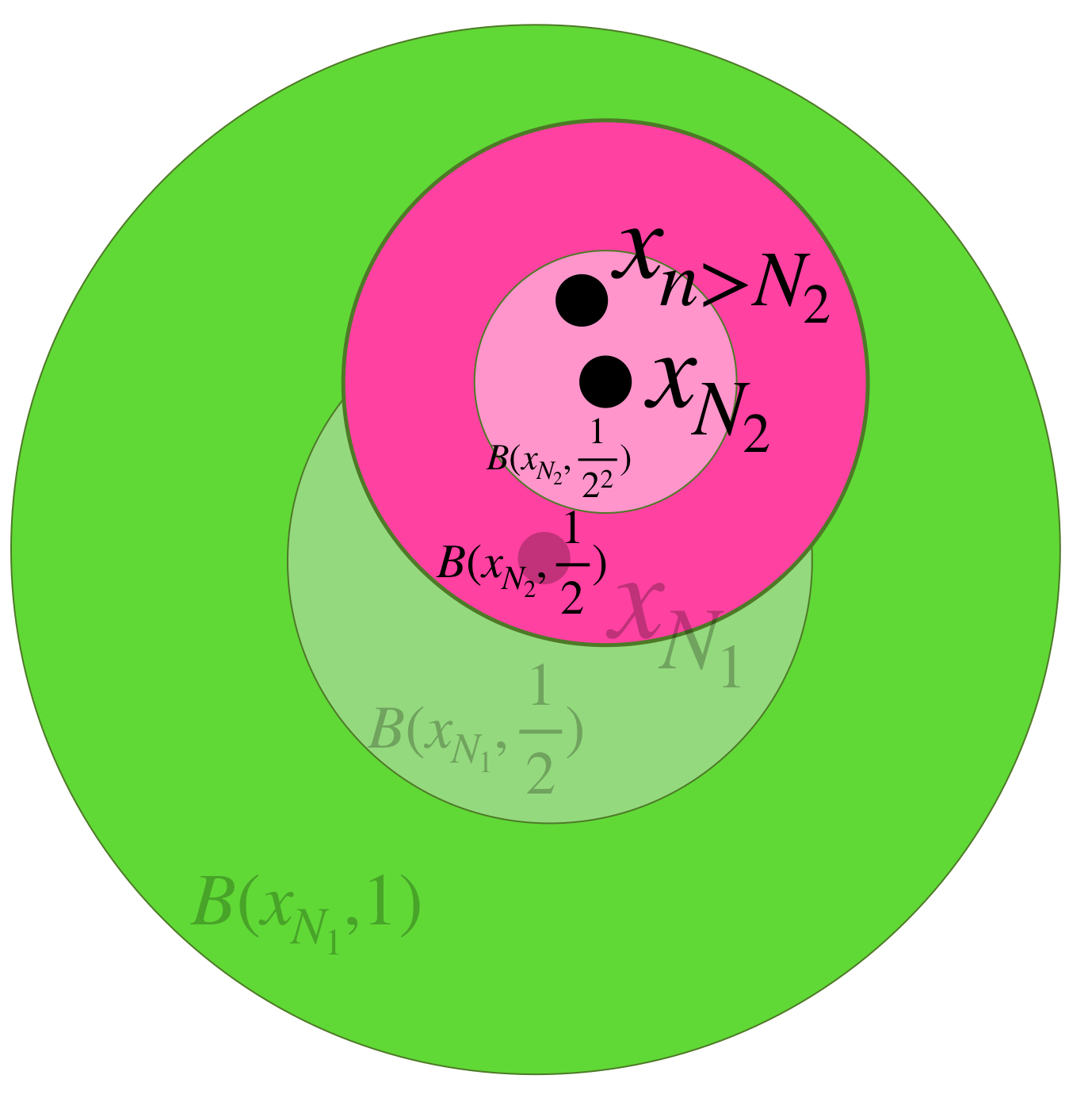
Nuevamente, como $(x_n)$ es de Cauchy, existe $N_2 \in \mathbb{N}$ tal que para cada $ \, n,m \geq N_2, \, d(x_n,x_m) < \frac{1}{2^2}.$ Entonces para toda $ \, n \geq N_2, \, x_n \in \overline{B}(x_{N_2}, \frac{1}{2^2}) \subset \overline{B}(x_{N_2},\frac{1}{2}).$ Nota que esta bola está contenida en la anterior.
Bola con centro en $x_{N_2}$ que tiene todos los términos siguientes de $(x_n)$ y está contenida en la bola anterior.
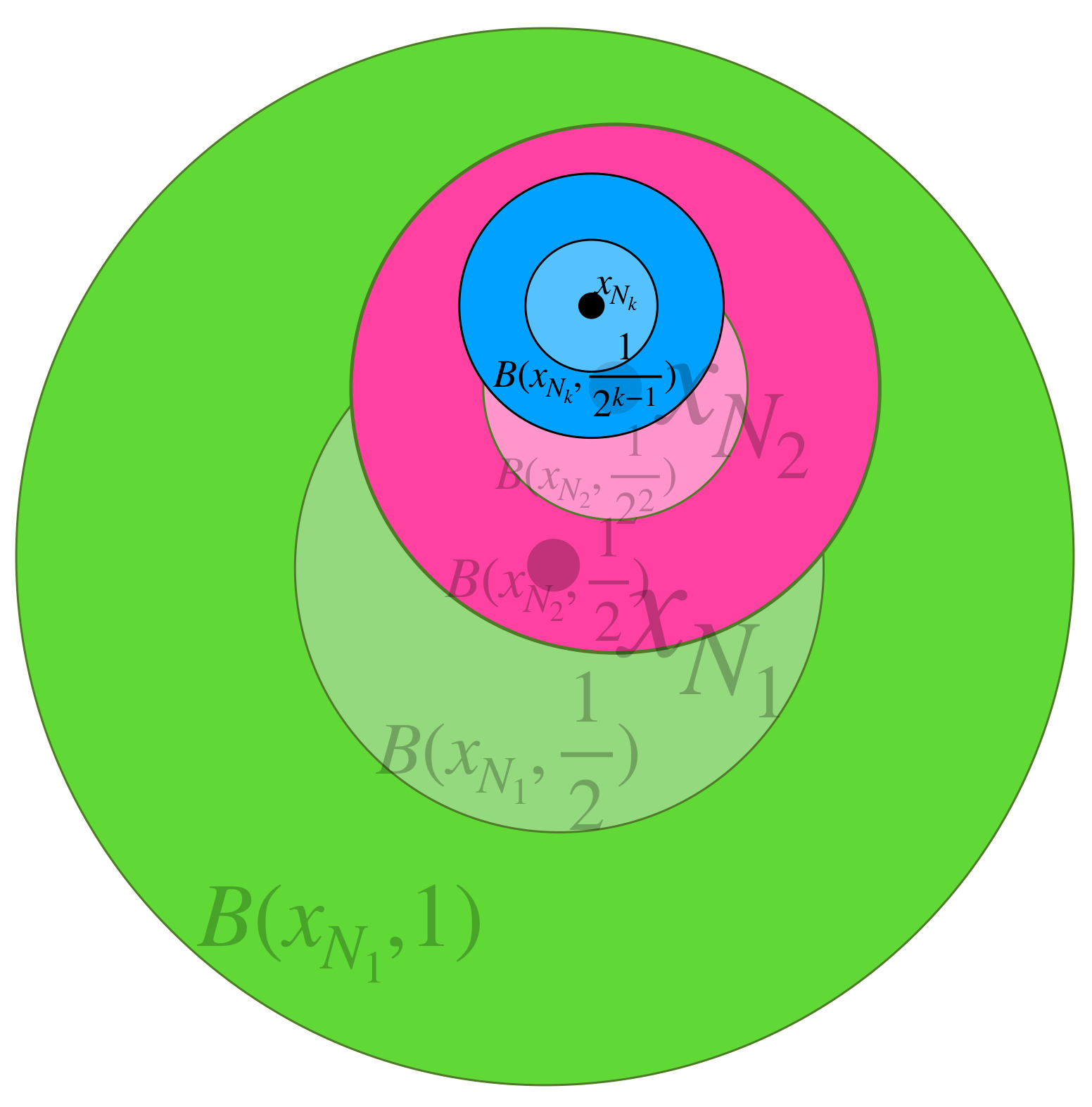
Continuando recursivamente, la bola $k$ de la sucesión en construcción estará dada por el centro $x_{N_k}$ donde $N_k$ es tal que para toda $ \, n,m \geq N_k, \, d(x_n,x_m) < \frac{1}{2^k}.$ Entonces para toda $ \, n \geq N_k, \, x_n \in \overline{B}(x_{N_k}, \frac{1}{2^k}) \subset \overline{B}(x_{N_k},\frac{1}{2^{k-1}}).$
Bola con centro en $x_{N_k}$ que tiene todos los términos siguientes de $(x_n)$ y está contenida en la bola anterior.
Así, la sucesión $(\overline{B}(x_{N_n},\frac{1}{2^{n-1}}))_{n \in \mathbb{N}} \,$ es de bolas encajadas y sus radios tienden a cero. Por hipótesis sabemos que la intersección de estos conjuntos es $\{x\},$ para algún $x \in X.$ Es sencillo probar que la sucesión de centros $(x_{N_n})_{n \in \mathbb{N}} \,$ converge en $x$ (se dejará como ejercicio). Entonces tenemos una subsucesión de la sucesión de Cauchy $(x_n)$ que es convergente y, como vimos en entrada anterior, esto demuestra que $(x_n) \to x$ por lo que $X$ es completo.
Notemos que para asegurar la contención de un conjunto en otro, necesitamos obtener información acerca de las distancias entre sus elementos. Esto motiva una definición para conjuntos más generales que una bola cerrada:
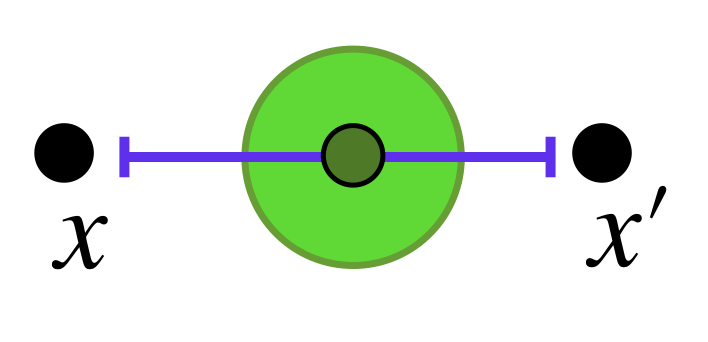
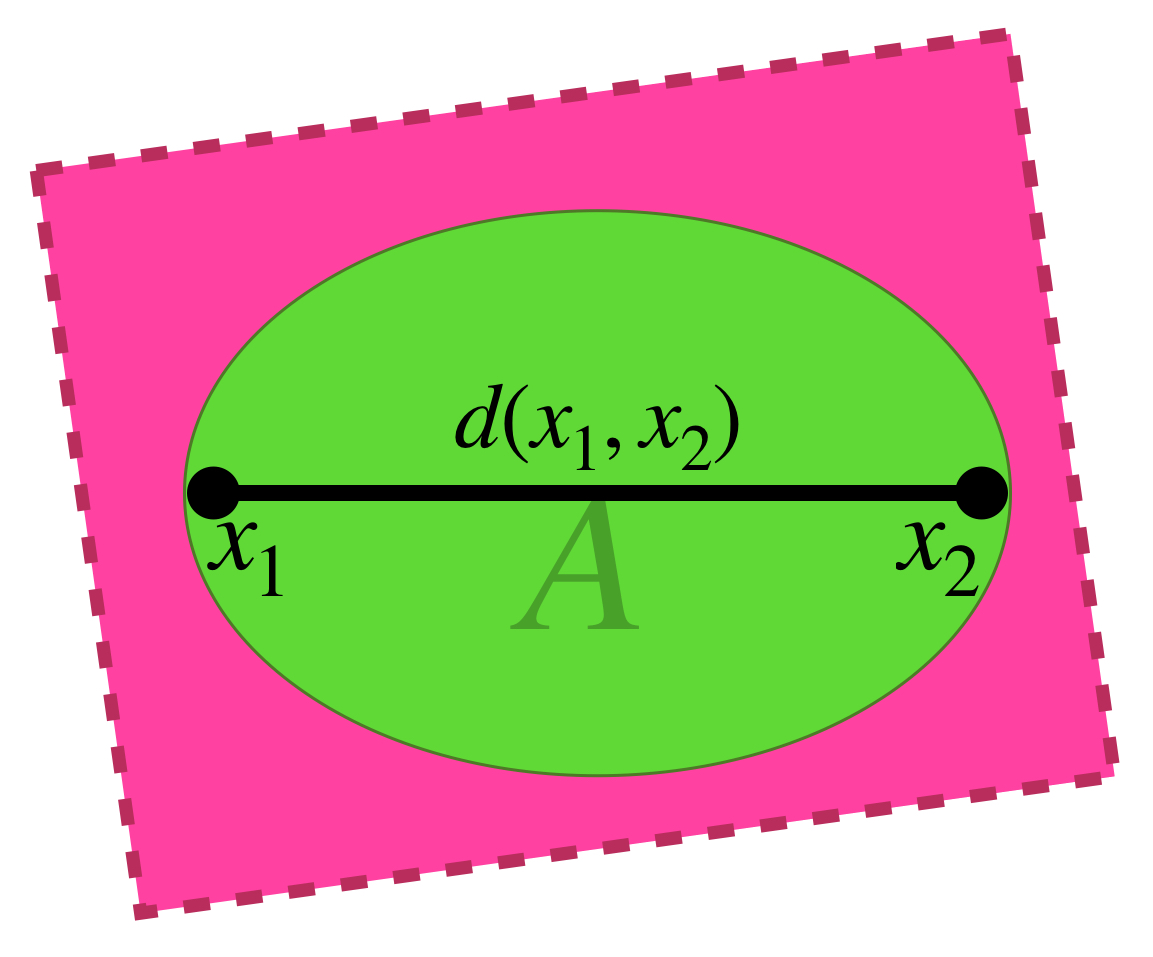
Definición. Diámetro de un conjunto. Sea $A \subset X.$ Entonces el diámetro de $A$ se define como: $$diam(A) := sup\{d(x_1,x_2) \,| \, x_1,x_2 \in A \}.$$
Representación del diámetro de un conjunto.
Cuando el conjunto $\{d(x_1,x_2) \, | \, x_1,x_2 \in A \}$ no es acotado, diremos que el diámetro es $\infty.$
Proposición. Sea $(x_n)_{n \in \mathbb{N}} \,$ una sucesión en $(X,d)$ y para cada $N \in \mathbb{N}, \, X_N:=\{x_k \, | \, k\geq N\}$ el conjunto de los términos de la sucesión que van a partir de $x_N.$ Entonces $(x_n)$ es una sucesión de Cauchy si y solo si $$\underset{N \to \infty}{lim}\, diam \, (X_N)=0$$
Demostración: Supón que $(x_n)$ es una sucesión de Cauchy en $X$ y sea $\varepsilon>0.$ Entonces existe $K \in \mathbb{N}$ tal que para toda $ \, l,m \geq K, \, d(x_l,x_m)<\varepsilon.$ En consecuencia $diam\,(X_K) \leq \varepsilon.$ Como para todo $L \geq K, \, (X_L) \subset (X_K)$ se sigue que para todo $L \geq K, \, diam(X_L) \leq diam(X_K) \leq \varepsilon.$ Por lo tanto $\underset{N \to \infty}{lim}\, diam \, (X_N)=0$
Ahora supongamos que $\underset{N \to \infty}{lim}\, diam \, (X_N)=0.$ Buscamos demostrar que $(x_n)$ es de Cauchy. Sea $\varepsilon >0$, como los diámetros tienden a cero, existe $K \in \mathbb{N}$ tal que en particular $(X_K)$ satisface que $diam \, (X_K) < \varepsilon.$ Entonces para toda $ \, l,m \geq K, \, d(x_l,x_m) < \varepsilon$ lo cual demuestra que $(x_n)$ es de Cauchy.
Terminemos con la siguiente:
Proposición. Sean $(A_n)_{n \in \mathbb{N}}\,$ una sucesión de subconjuntos cerrados de un espacio métrico completo $(X,d)$ tales que para todo $n \in \mathbb{N}, \, A_{n+1} \subset A_{n}$ y además $\underset{n \to \infty}{lim} \, diam(A_n) \to 0.$ Entonces $\underset{n \in \mathbb{N}}{\cap}A_n=\{x\}$ para algún $x \in X.$
Demostración: Para cada $n \in \mathbb{N}$ elegimos $x_n \in A_n.$ Entonces para cada $N \in \mathbb{N}$ el conjunto $X_N$ definido en la proposición anterior está contenido en $A_N$, pues los conjuntos están anidados. En consecuencia, $diam(X_N) \leq diam(A_n) \to 0.$ La proposición anterior nos permite concluir que $(x_n)$ es una sucesión de Cauchy. Como $X$ es completo, se sigue que $(x_n) \to x$ para algún $x \in X.$ Dejamos como ejercicio demostrar que $\underset{n \in \mathbb{N}}{\cap}A_n=\{x\}.$
¿Recuerdas la distancia de Hausdorff vista en La métrica de Hausdorff? Nota que si $A$ y $B$ son subconjuntos de $X$ entonces $d_H(A,B)\leq diam(A \cup B).$ En esa misma entrada vimos que conjuntos anidados convergen a la intersección de todos ellos, y que este conjunto está formado por los puntos de convergencia de sucesiones que tienen elementos en los conjuntos anidados. En entradas futuras veremos que los espacios compactos son cerrados. ¿Cómo justificarías las proposiciones vistas en esta entrada a partir de los resultados presentados en la métrica de Hausdorff?
Más adelante…
Veremos los conceptos de conjunto denso y conjunto nunca denso. Descubriremos un resultado que ha sido muy importante en el estudio de los espacios métricos completos: El teorema de Baire.
Tarea moral
Sea $\mathbb{Q}$ el subespacio de $\mathbb{R}$ con la métrica usual. Demuestra que la intersección de los intervalos $[\sqrt{2}-\frac{1}{n},\sqrt{2}+\frac{1}{n}], \, n \in \mathbb{N}$ es vacía en $\mathbb{Q}.$
Demuestra que si $x$ está en la intersección de bolas encajadas $\underset{n \in \mathbb{N}}{\cap} \, \overline{B}(x_n,\varepsilon_n)$ entonces es único.
Demuestra que la sucesión de centros $(x_{N_n})_{n \in \mathbb{N}} \,$ de la proposición converge en $x.$
Sea $A \subset X.$ Demuestra que $diam(A)=diam(\overline{A}).$
Con respecto a la última proposición, demuestra que $\underset{n \in \mathbb{N}}{\cap}A_n=\{x\}.$
Da un ejemplo de un espacio métrico completo y de una sucesión de bolas cerradas en este espacio, encajadas unas en otras que tenga intersección vacía.
Bibliografía
Kolmogorov, A.N., Fomin, S.V., Elementos de la Teoría de Funciones y del Análisis Funcional. (2a ed.). Moscú: Editorial MIR, 1975. Págs: 74 y 75.
En la entrada anterior vimos que no es suficiente que una sucesión sea de Cauchy para asegurar que sea convergente. Hay espacios donde sí lo es y serán llamados «completos». Contar con esta propiedad nos permite solo tener que justificar que una sucesión satisface la condición de Cauchy para concluir convergencia. Comencemos con la definición:
Definición. Espacio métrico completo y espacio de Banach: Sea $(X,d)$ un espacio métrico. Decimos que $X$ es un espacio métrico completo si toda sucesión de Cauchy $(x_n)_{n \in \mathbb{N}} \,$ es convergente en $X.$ A un espacio normado que es completo con la métrica inducida por su norma le llamaremos espacio de Banach.
Ejemplos:
El espacio métrico euclidiano $\mathbb{R}^n$ es completo. La demostración la vimos en la sección anterior. (Sucesiones de Cauchy).
Sea $X$ un conjunto no vacío con la métrica discreta. Entonces $X$ es completo. La demostración se propondrá como ejercicio.
$\mathbb{R}^n$ con la métrica $d_\infty(x,y):=max \{ |x_1-y_1|,…,|x_n-y_n| \}$ donde $x=(x_1,…,x_n)$ y $y=(y_1,…,y_n)$ es completo.
Demostración: Sea $(x_n)_{n \in \mathbb{N}} \,$ una sucesión de Cauchy en $\mathbb{R}^n.$ En la sección anterior vimos que $(x_n)$ converge en la métrica euclidiana $d_2.$ Sea $x$ el punto de convergencia. En la entrada Más conceptos de continuidad vimos que $d_\infty$ y $d_2$ son métricas equivalentes, entonces para todo $\varepsilon >0$ existe $N \in \mathbb{N}$ y $c \geq 0$ tales que para todo $n \geq N$: $d_\infty(x_n,x)\leq c\,d_{2}(x_n,x) < c \frac{\varepsilon}{c}=\varepsilon$ Por lo tanto $x_n \to x$ en $(\mathbb{R}^n, d_\infty),$ lo cual demuestra que es un espacio métrico completo.
En general, la completitud no es una propiedad invariante bajo homeomorfismos. Esto es, un espacio completo puede ser homeomorfo a otro que no lo sea.
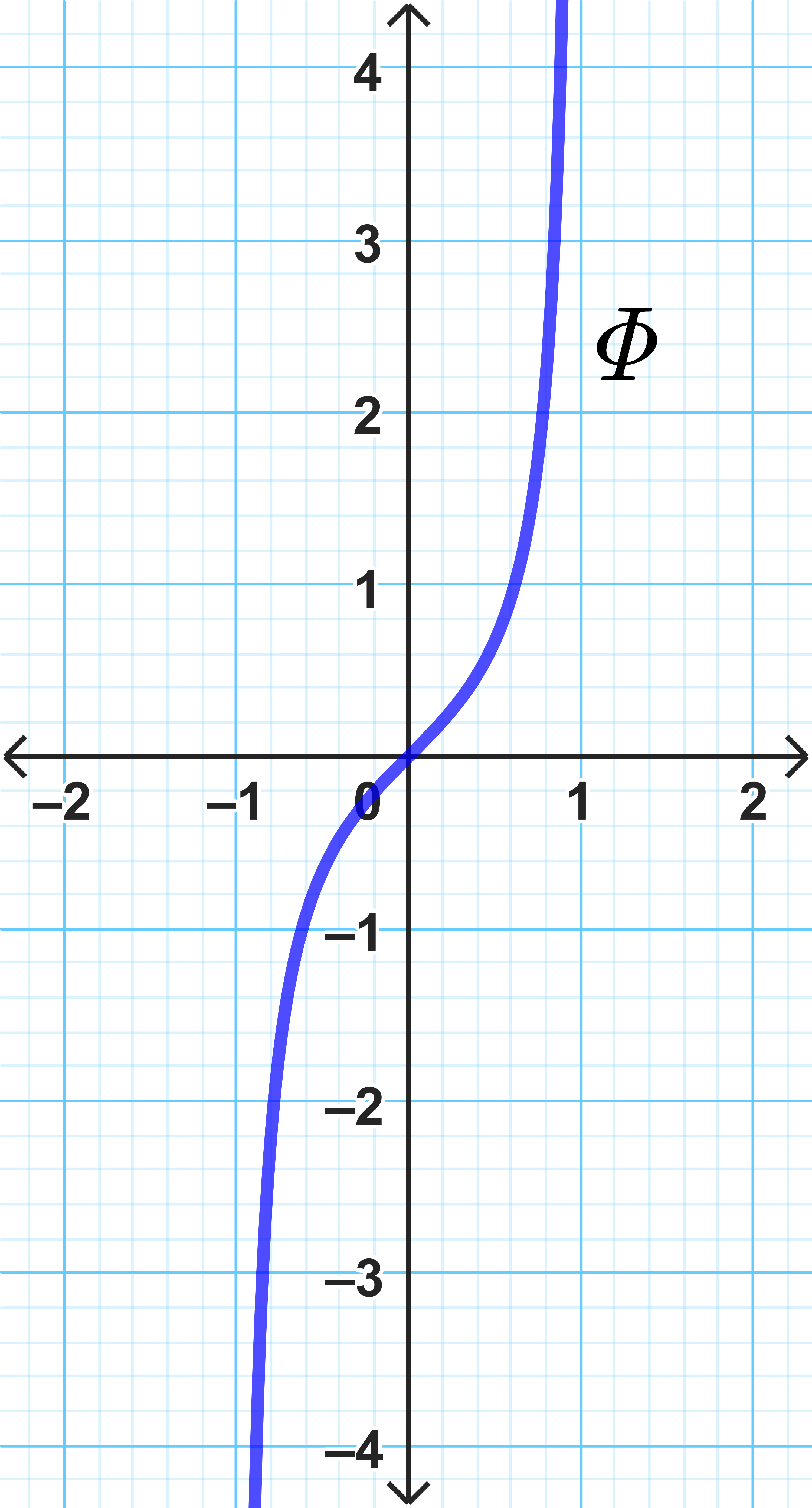
Ejemplo: El espacio euclidiano $\mathbb{R}$ es homeomorfo al subespacio $(-1,1).$
Es un homeomorfismo entre ambos espacios. No obstante la sucesión $(1- \frac{1}{n})_{n \in \mathbb{N}} \,$ tiene sus elementos en $(-1,1)$ y es de Cauchy pero no converge en el subespacio. Por lo tanto $(-1,1)$ no es completo pese a que $\mathbb{R}$ sí lo es.
Gráfica de un homeomorfismo entre $(-1,1)$ y $\mathbb{R}.$
Por otro lado, la completitud sí se conserva bajo equivalencias. (Concepto visto en Más conceptos de continuidad):
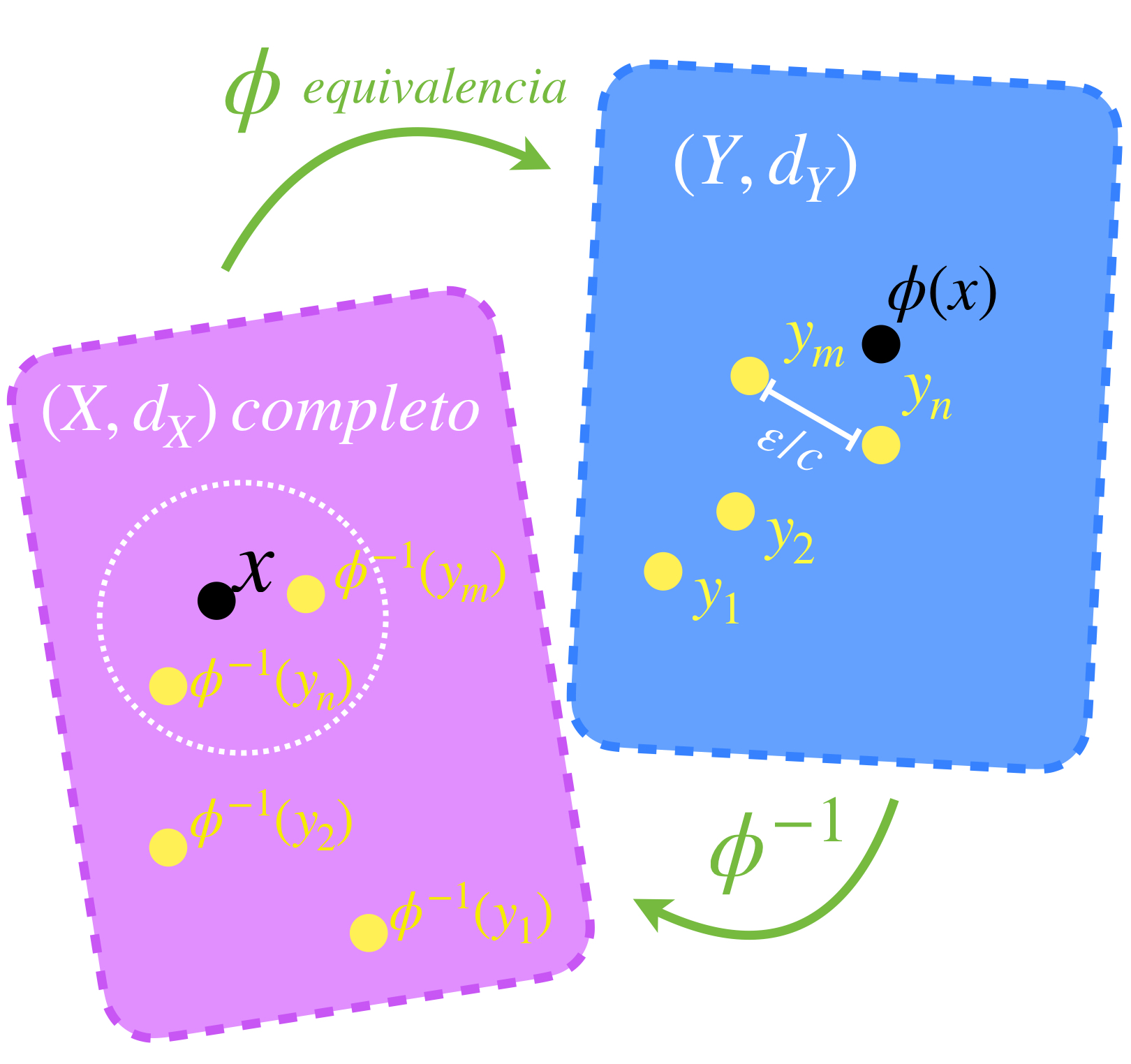
Proposición. Sean $(X,d_X)$ y $(Y,d_Y)$ espacios métricos con $\phi: X \to Y$ una equivalencia entre ellos. Entonces $X$ es completo si y solo si $Y$ lo es.
Demostración: Supongamos que $X$ es completo. Buscamos demostrar que $Y$ también lo es. Sea $(y_n)_{n \in \mathbb{N}} \,$ una sucesión de Cauchy en $Y.$ Como $\phi$ es equivalencia entonces $\phi^{-1}$ es lipschitz continua. Considera la sucesión $\phi^{-1}(y_n)_{n \in \mathbb{N}} \,$ en $X.$ Dadas las hipótesis, para toda $\varepsilon >0$ existe $N \in \mathbb{N}$ y $c \geq 0$ tales que si $n,m \geq N$ entonces: $d_X(\phi^{-1}(y_n),\phi^{-1}(y_m))\leq c\, d_Y(y_n,y_m) < c \, \frac{\varepsilon}{c} = \varepsilon$ lo cual prueba que la sucesión $\phi^{-1}(y_n)_{n \in \mathbb{N}} \,$ es de Cauchy en $X$, espacio que es completo, en consecuencia $\phi^{-1}(y_n) \to x$ en $X$ para algún $x \in X.$
Aplicación de la función inversa $\phi ^{-1}$ en sucesión $(y_n).$
Finalizamos aplicando $\phi$ a la última sucesión. En la entrada de Funciones continuas en espacios métricos vimos que podemos concluir que $\phi(\phi^{-1}(y_n)) \to \phi(x)$ en $Y.$ Por lo tanto $(y_n)$ es una sucesión convergente lo cual demuestra que $Y$ es un espacio métrico completo. El regreso es análogo y se propondrá como ejercicio al final de esta sección.
La completitud no siempre se hereda a los subespacios de un espacio métrico completo. La siguiente proposición nos muestra las condiciones requeridas para que esto ocurra:
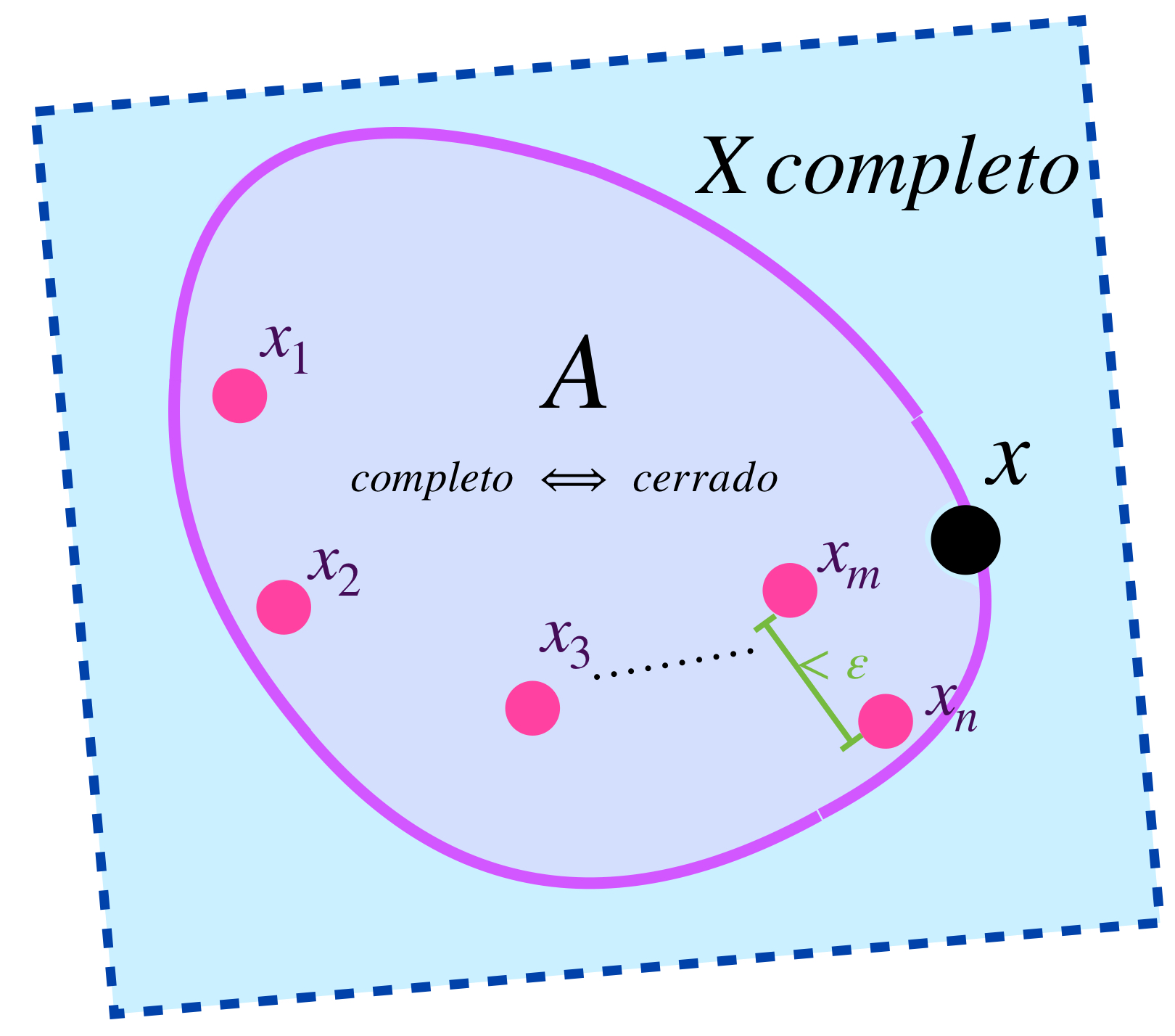
Proposición. Sea $(X,d)$ un espacio métrico completo y $A \subset X.$ Entonces el subespacio $(A,d)$ es completo si solo si $A$ es cerrado en $X.$
Demostración:
Supón que $(A,d)$ es completo. Buscamos demostrar que $\overline{A} \subset A.$ Sea $x \in \overline{A}.$ En la entrada de Convergencia concluimos que existe una sucesión $(x_n)_{n \in \mathbb{N}} \,$ de términos en $A$ tal que $x_n \to x.$ Como converge, se concluye que es de Cauchy. Como todos los términos están en $A$, que es completo, se concluye que es convergente en $A.$ Como el límite es único, concluimos que el punto de convergencia $x \in A.$ Por lo tanto $\overline{A} \subset A,$ probando así que $A$ es cerrado.
Existe una sucesión en $A$ que converge al punto de contacto $x$.
Ahora partamos de suponer que $A \subset X$ es cerrado. Sea $(x_n)_{n \in \mathbb{N}} \,$ una sucesión de Cauchy en $A.$ Como $X$ es completo, se sigue que $x_n \to x$ en $X$ para algún $x \in X.$ Por el mismo resultado de la entrada de Convergencia concluimos que $x \in A.$ por lo tanto $x_n \to x$ en $A$ lo cual demuestra que $A$ es completo.
En la sección de la compacidad en espacios normados veremos que todo espacio normado de dimensión finita es de Banach. Es natural preguntarse qué ocurre con los de dimensión infinita. Como ejemplo tenemos al espacio de los polinomios $\mathcal{P}[0,1].$ Visto como subespacio del espacio de funciones continuas $C^0[0,1]$ es de dimensión infinita pero no es cerrado. La proposición anterior nos permite concluir que $\mathcal{P}[0,1]$ no es completo. La demostración del ejemplo se puede consultar en las notas de Luis O. Manuel. El documento se encuentra en este enlace.
Más adelante…
Buscaremos aplicar estos resultados en conjuntos anidados, unos dentro de otros. Partir de una sucesión de Cauchy nos permitirá asegurar la existencia de un punto de convergencia, cuando estemos en un espacio completo. Conoceremos condiciones en las que dicho punto existe y pertenece a la intersección de los conjuntos anidados.
Tarea moral
Demuestra que si $X$ es un conjunto no vacío con la métrica discreta entonces $X$ es completo.
Sean $(X,d_X)$ y $(Y,d_Y)$ espacios métricos con $\phi: X \to Y$ una equivalencia entre ellos. Prueba que si $Y$ es completo entonces $X$ lo es.
Sea $(x_n)_{n \in \mathbb{N}} \,$ una sucesión creciente y acotada en $\mathbb{R}.$ Concluye que $(x_n)$ es convergente en $\mathbb{R}$ demostrando que es de Cauchy.