Introducción
Durante la primera unidad de este curso vimos que las transformaciones lineales $T:F^n \to F^m$ pueden ser descritas por medio de matrices $A\in M_{m,n}(F)$. Nuestro objetivo ahora es extender este resultado para describir transformaciones lineales $T:V\to W$ entre espacios vectoriales de dimensión finita $V$ y $W$. Es decir, para cada una de estas transformaciones, queremos ver cómo se ven en forma matricial.
Sin embargo, a diferencia de lo que sucedía antes, la descripción en esta forma no será única. Para construir una matriz que represente a una transformación lineal, necesitaremos fijar bases para $V$ y $W$. Distintas bases nos darán distintas matrices.
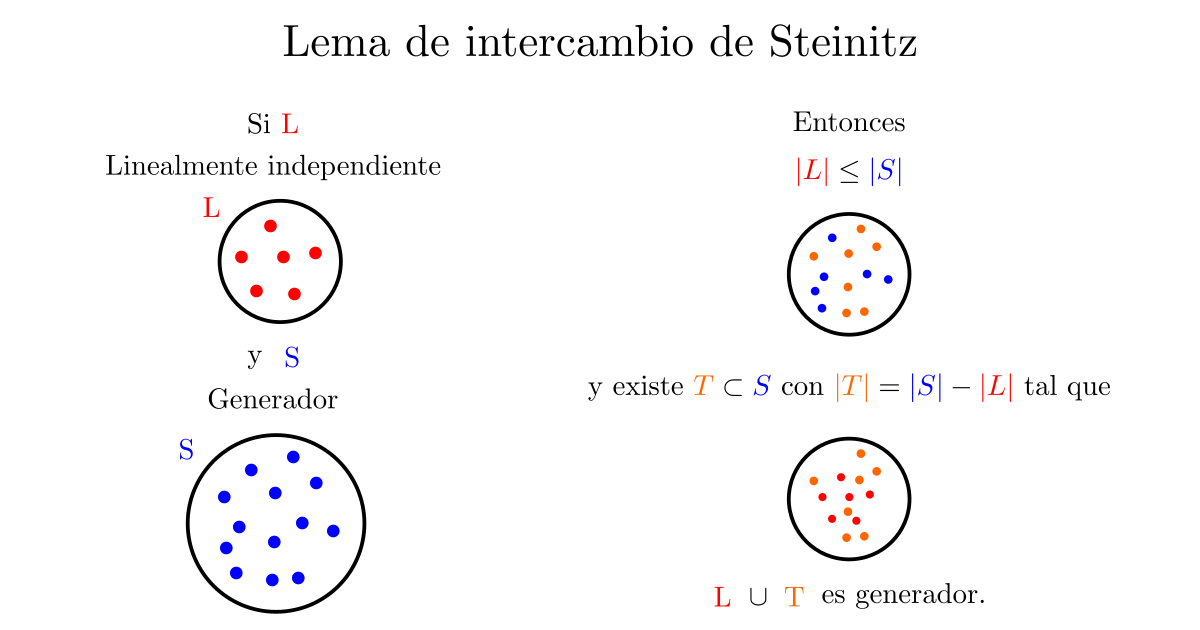
Para esta entrada todos los espacios vectoriales que usemos son de dimensión finita sobre el campo $F$. Usaremos los resultados de la entrada pasada, en la que estudiamos qué le hacen las transformaciones lineales a los conjuntos linealmente independientes, a los generadores y a las bases.
Un paréntesis técnico de isomorfismos
Quizás a estas alturas ya te hayas dado cuenta de que, en cierto sentido, los espacios vectoriales con la misma dimensión se parecen mucho entre sí. Por ejemplo, los espacios vectoriales $\mathbb{R}^4$, $M_2(\mathbb{R}) $ y $\mathbb{R}_3[x]$ pueden pensarse «como el mismo» si identificamos a cada vector $(a,b,c,d)$ con la matriz $\begin{pmatrix} a & b \\ c & d \end{pmatrix}$, o bien con el polinomio $a+bx+cx^2+dx^3$. Esta identificación es biyectiva y «respeta las operaciones».
Con esta motivación, veamos una definición formal.
Definición. Decimos que una transformación lineal $T:V\to W$ es un isomorfismo de espacios vectoriales si es biyectiva. Lo denotamos como $V\simeq_{T} W$, que se lee «$V$ isomorfo a $W$ mediante $T$».
Problema. Sea $T:V\to W$ un isomorfismo de espacios vectoriales. Prueba que su inversa $T^{-1}:W\to V$ es un isomorfismo de espacios vectoriales.
Demostración. La transformación $T^{-1}$ es biyectiva, pues es invertible de inversa $T$, así que sólo hace falta checar que $T^{-1}$ es lineal. Tomemos $w_1$, $w_2$ en $W$, y $c$ en el campo. Como $T$ es suprayectiva, podemos tomar $v_1=T^{-1}(w_1)$ y $v_2=T^{-1}(w_2)$. Entonces $T(v_1)=w_1$ y $T(v_2)=w_2$, así
\begin{align*}
T^{-1}(w_1+cw_2)&=T^{-1}(T(v_1)+cT(v_2))\\
&=T^{-1}(T(v_1+cv_2))\\
&=v_1+cv_2
\end{align*}
En la segunda igualdad estamos usando que $T$ es lineal. De esta forma, concluimos que $T^{-1}$ es lineal también.
$\square$
Formalicemos ahora sí nuestra intuición de que «todos los espacios vectoriales de la misma dimensión finta $n$ sobre un mismo campo se comportan igual». En términos matemáticos, decimos que «es posible clasificar los espacios vectoriales de dimensión finita distintos de $\{0\}$, salvo isomorfismos». Para mostrar esto, veremos que para cada entero positivo $n$ todos los espacios vectoriales de dimensión $n$ son isomorfos a $F^n$. El siguiente resultado da el isomorfismo de manera explícita.
Teorema. Sea $n$ un entero positivo y sea $V$ un espacio vectorial de dimensión finita sobre $F$. Si $B={e_1,\dots,e_n}$ es una base de $V$, entonces la transformación $i_B:F^n\to V$ definida por $$i_B(x_1,\dots,x_n)=x_1e_1+x_2e_2+\dots+x_ne_n$$ es un isomorfismo de espacios vectoriales.
La verificación de los detalles de este teorema queda como tarea moral. Como sugerencia, recuerda que una base $B$ de $V$ te permite expresar a cada vector de $V$ (de aquí saldrá la suprayectividad) de manera única (de aquí saldrá la inyectividad) como combinación lineal de elementos de $B$.
Corolario. Si $T:V\to W$ es un isomorfismo de espacios vectoriales, entonces $\dim V=\dim W$.
Bases ordenadas
Sea $V$ un espacio vectorial de dimensión finita $n$. Una base ordenada de $V$ es simplemente una base para la cual nos importa en qué orden están sus elementos. La escribimos con notación de paréntesis en vez de llaves, es decir, en vez de poner $B=\{v_1,\ldots,v_n\}$, ponemos $B=(v_1,\ldots,v_n)$ para hacer énfasis en el orden.
Ejemplo 1. El conjunto $\{(1,2),(3,4)\}$ es una base de $\mathbb{R}^2$. De aquí, podemos obtener dos bases ordenadas, $B=((1,2),(3,4))$ y $B’=((3,4),(1,2))$. Aunque tienen a los mismos elementos, las pensamos como bases ordenadas diferentes pues sus elementos aparecen en diferente orden.
Del mismo modo, las bases $B=(1,x,x^2,x^3)$ y $B’=(x^3,x^2,x,1)$ son la misma base de $\mathbb{R}_2[x]$, pero son distintas como bases ordenadas.
$\triangle$
Por las discusión en la sección anterior, la elección de una base ordenada en un espacio vectorial $V$ de dimensión $n$ nos permite identificar $V$ con $F^{n}$. Es decir, dada una base $B$, podemos «ponerle coordenadas» a los elementos de $V$. Dependiendo de la base ordenada escogida, es posible que obtengamos diferentes coordenadas.
Ejemplo 2. Consideremos el espacio vectorial $M_2(\mathbb{R})$. Se puede verificar que cada uno de los siguientes conjuntos ordenados son una base:
\begin{align*}
B&=\left(\begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix},\begin{pmatrix} 0 & 1 \\ 0 & 0 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 1 & 0 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 0 & 1 \end{pmatrix}\right)\\
B’&=\left(\begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 1 & 0 \end{pmatrix},\begin{pmatrix} 0 & 1 \\ 0 & 0 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 0 & 1 \end{pmatrix}\right)\\
B»&=\left(\begin{pmatrix} 1 & 1 \\ 1 & 1 \end{pmatrix},\begin{pmatrix} 0 & 1 \\ 1 & 1 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 1 & 1 \end{pmatrix},\begin{pmatrix} 0 & 0 \\ 0 & 1 \end{pmatrix}\right)
\end{align*}
Como cada uno de ellos es una base, entonces podemos escribir a la matriz $A=\begin{pmatrix} 1 & 2 \\ 3 & 4 \end{pmatrix}$ como combinación lineal de elementos de cada uno de $B$, $B’$ o $B»$.
Si lo hacemos para $B$, tendríamos (en orden), a los coeficientes $1,2,3,4$, así que las coordenadas de $A$ en la base ordenada $B$ serían $(1,2,3,4)$.
Si lo hacemos para $B’$, tendríamos (en orden), a los coeficientes $1,3,2,4$, así que las coordenadas de $A$ en la base ordenada $B’$ serían $(1,3,2,4)$. Aunque $B$ y $B’$ tengan los mismos elementos, las coordenadas difieren pues como bases ordenadas $B$ y $B’$ son distintas.
Si lo hacemos para $B»$, tendríamos (en orden), a los coeficientes $1,1,1,1$, así que las coordenadas de $A$ en la base ordenada $B»$ serían $(1,1,1,1)$. Aquí obtenemos coordenadas muy distintas pues $B$ y $B»$ ni siquiera tienen a los mismos elementos.
$\triangle$
La forma matricial de una transformación lineal
Consideremos ahora espacios vectoriales $V$ y $W$ de dimensiones $n$ y $m$ respectivamente. Supongamos que tenemos una transformación lineal $T:V\to W$. Escogemos bases ordenadas $B_V=(v_1,\dots, v_n)$ y $B_W=(w_1,\dots,w_m)$ de $V$ y $W$ respectivamente. Ten cuidado, aquí $(v_1,\dots, v_n)$ no es un vector de $F^n$, sino una colección ordenada de vectores de $V$.
Por el teorema de caracterización de espacios vectoriales de dimensión finita, tenemos los isomorfismos $$i_{B_{V}}:F^n\to V,$$ $$i_{B_{W}}:F^m\to W.$$
¿Cómo podemos usar todas estas transformaciones para construir una transformación $F^n\to F^m$? La idea es usar el inverso de $i_{B_W}$ y componer todo.
Así, consideramos $\psi_T$ como la composición de las transformaciones $i_{B_{V}}, T, i_{B_{W}}^{-1}$, es decir, $$\psi_T:F^n\to F^m,$$ está dada por $$\psi_T=i_{B_W}^{-1}\circ T\circ i_{B_{V}}.$$
De esta forma, $\psi_T$ es una transformación lineal entre $F^n$ y $F^m$. ¡Este tipo de transformaciones ya las conocemos! Sabemos que $\psi_T$ se describe de manera única por medio de una matriz $A\in M_{m,n}(F).$ Esta es, por definición, la matriz asociada a $T$ con respecto a las bases $B_V$ y $B_W$ o bien la forma matricial de $T$. Dicha matriz depende fuertemente de las dos bases, así que la denotaremos como $\text{Mat}_{B_W,B_V}(T)$ . Por el momento sólo pongamos mucha atención en el orden en el que escribimos las bases en los subíndices. Es importante más adelante veremos que resulta útil escribirlo así.
Cuando $T:V\to V$ va de un espacio vectorial a sí mismo y usamos sólo una base $B$, simplificamos la notación a $\text{Mat}_B(T)$.
Evaluar $T$ usando su forma matricial
La construcción anterior parece muy complicada, pero en realidad es muy natural. Lo que está sucediendo es lo siguiente. Ya sabemos que toda transformación lineal entre $F^n$ y $F^m$ está dada por matrices. Podemos extender esto a una descripción de transformaciones lineales entre $V$ y $W$ identificando $V$ con $F^n$ y $W$ con $F^m$ vía la elección de bases en $V$ y $W$.
Notemos que si definimos $A:=\text{Mat}_{B_{W},B_{V}}(T)$, entonces tenemos que
$i_{B_{W}}(Ax)=T(i_{B_{V}}(x))$ … (1)
Esta igualdad nos va a ayudar a decir quién es $T$ en términos de las entradas de la matriz $A$. Sea $\{e_1,\dots,e_n\}$ la base canónica de $F^n$ y $\{f_1,\dots,f_m\}$ la base canónica de $F^m$. Si$ A=[a_{ij}]$, entonces por definición $Ae_i=a_{1i}f_1+\dots+a_{mi}f_{m}$, así para $x=e_i$ se tiene
$i_{B_{W}}(Ax)=i_{B_{W}}(a_{1i}f_1+\dots + a_{mi}f_m) = a_{1i}w_1+\dots + a_{mi}w_m.$
Por otro lado, $i_{B_{V}}(e_i)=v_i$, de manera que la relación (1) es equivalente a la relación
$T(v_i)=a_{1i}w_1+\dots + a_{mi}w_m$
Aquí empieza a haber mucha notación, pero no hay que perderse. Hasta ahora lo que tenemos es que «podemos saber cuánto vale la transformación $T$ en cada elemento de la base de $V$ en términos de la matriz $A$». ¡Este es un paso importante, pues en la entrada anterior vimos que basta saber qué le hace una transformación a los elementos de la base para saber qué le hace a cualquier vector! Resumimos lo obtenido hasta ahora.
Proposición. Sea $T:V\to W$ una transformación lineal y sean $B_V=\{v_1,\dots v_n\}, B_W=\{w_1,\dots,w_m\}$ bases en $V$ y $W$, respectivamente. Escribamos $\text{Mat}_{B_W,B_V}(T)=[a_{ij}]$. Entonces para toda $1\leq i\leq n$ se tiene $$T(v_i)=\displaystyle\sum_{j=1}^m a_{ji}w_j.$$
Así, si tenemos la matriz $A$ que representa a $T$ en las bases $B_V$ y $B_W$ y un vector arbitrario $v$ en $V$, para saber quién es $T(V)$ basta:
- Usar la proposición anterior para saber quién es $T(v_i)$ para cada $v_i$ en la base $B_V$.
- Expresar a $v$ en términos de la base $B_V$ como, digamos, $v=c_1v_1+\ldots+c_nv_n$.
- Usar que $T$ es lineal para concluir que $T(v)=c_1T(v_1)+\ldots+c_nT(v_n)$ y usar los valores de $T(v_i)$ encontrados en el primer inciso.
Forma matricial de composiciones de transformaciones lineales
Para finalizar esta entrada queremos entender la relación entre la composición $S\circ T$ de transformaciones lineales y las matrices asociadas de $T$ y $S$. En otras palabras, sean $T:V\to W$ y $S:W\to U$ transformaciones lineales fijas y supongamos que $m=dimV$, $n=dimW$, $p=dimU$. También fijemos las bases $B_U, B_V, B_W$ en $U,V,W$, respectivamente. Para simplificar las cosas escribamos
$\mathcal{A}=\text{Mat}_{B_U,B_W}(S)$ y $\mathcal{B}=\text{Mat}_{B_W,B_V}(T)$
Con respecto a las bases $B_U,B_V,B_W$ se tienen los isomorfismos $i_{B_U}, i_{B_V}, i_{B_W}$ definidos como lo hicimos anteriormente en esta misma entrada del blog, y por definición de $\mathcal{A}, \mathcal{B}$ se tiene
$i_{B_W}(\mathcal{B}x)=T(i_{B_V}(x))$ con $x\in F^m$,
$i_{B_U}(\mathcal{A}y)=S(i_{B_W}(y))$ con $y\in F^n$.
Aplicando $S$ en la primera relación y después usando la segunda relación, se tiene para $x\in F^m$
$(S\circ T)(i_{B_V}(x))=S(i_{B_W}(\mathcal{B}x))=i_{B_U}(\mathcal{A} \mathcal{B}x)$.
Esta última relación y la definición de $\text{Mat}_{B_U,B_V}(S\circ T)$ nos muestra que
$\text{Mat}_{B_U,B_V}(S\circ T)=\mathcal{A} \cdot \mathcal{B}$.
En otras palabras, la composición de transformaciones lineales se reduce a multiplicar sus matrices asociadas o de manera más formal
Teorema. Sean $T:V\to W$ y $S:W\to U$ transformaciones lineales entre espacios vectoriales de dimensión finita y sean $B_U, B_V, B_W$ bases de $U,V,W$, respectivamente. Entonces
$\text{Mat}_{B_U,B_V}(S\circ T)=\text{Mat}_{B_U,B_W}(S)\cdot \text{Mat}_{B_W,B_V}(T).$
Cuando tenemos transformaciones lineales de un espacio vectorial $V$ a sí mismo, y usamos la misma base $B$, el resultado anterior se puede escribir de una manera más sencilla.
Corolario. Sean $T_1,T_2:V\to V$ transformaciones lineales en un espacio vectorial de dimensión finita $V$, y sea $B$ una base de $V$. Entonces
$\text{Mat}_{B}(T_1\circ T_2)=\text{Mat}_{B}(T_1)\cdot \text{Mat}_{B}(T_2)$.
Más adelante…
En esta entrada comenzamos con una transformación lineal $T:V\to W$ y bases ordenadas de de $V$ y $W$ para representar a $T$ como una matriz. Así mismo, vimos cómo tras una elección de base podemos pensar a cualquier vector en términos de sus «coordenadas», usando a los coeficientes que permiten expresarlo (de manera única) como combinación lineal de elementos de la base. Las matrices y coordenadas que así obtenemos nos ayudarán mucho. Sin embargo, será fundamental entender qué es lo que sucede con estas representaciones cuando elegimos bases diferentes, y cómo podemos cambiar de ciertas coordenadas o matrices a otras cuando hacemos un cambio de base. Esto es lo que estudiaremos en las siguientes entradas.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
- Verifica que la relación «son isomorfos» para espacios vectoriales es una relación de equivalencia.
- Muestra que la transformación $i_B$ dada en el teorema de clasificación de espacios vectoriales de dimensión finita en efecto es un isomorfismo.
- Asegúrate de entender el último corolario.
Entradas relacionadas
- Ir a Álgebra Lineal I
- Entrada anterior del curso: Transformaciones lineales y vectores independientes
- Siguiente entrada del curso: Problemas de transformaciones lineales, vectores independientes y forma matricial
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104721 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM»