Es posible que sepas que una matriz $$A=\begin{pmatrix} a & b\\ c & d \end{pmatrix}$$de $2\times 2$ es invertible si y sólo si $ad-bc=0$, y que en ese caso la inversa está dada por $$B=\frac{1}{ad-bc}\begin{pmatrix} d & -b\\ -c & a \end{pmatrix}.$$ De hecho, una vez que se propone a $B$ como esta matriz, es sencillo hacer la multiplicación de matrices y verificar que en efecto tanto $AB$ como $BA$ son la matriz identidad de $2\times 2$.
Sin embargo, la idea de esta entrada es deducir que $ad-bc$ tiene que ser distinto de $0$ para que $A$ sea invertible y que, en ese caso, la inversa tiene que ser de la forma que dijimos. En esta deducción no usaremos nunca la definición ni propiedades de determinantes.
El procedimiento
Lo que haremos es aplicar el procedimiento de reducción gaussiana para encontrar inversas, es decir, le haremos reducción gaussiana a la matriz $A’=\begin{pmatrix} a & b & 1 & 0\\ c & d & 0 & 1 \end{pmatrix}$ obtenida de «pegar» a la matriz $A$ una matriz identidad a su derecha. Es un resultado conocido que si $A$ es invertible, entonces al terminar la reducción gaussiana de $A’$ la matriz de $2\times 2$ que queda a la izquierda será la identidad y la que quede a la derecha será la inversa de $A$.
Empecemos con una matriz $A=\begin{pmatrix} a & b\\ c & d \end{pmatrix}$ de $2\times 2$ cualquiera. Si ambos $a$ y $c$ son iguales a $0$, entonces la primer columna de $BA$ es $0$ para toda $B$, y por lo tanto $A$ no puede tener inversa. Así, una primera condición para que $A$ tenga inversa es que $a$ o $c$ sean distintos de cero. Si $a$ fuera $0$, el primer paso de reducción gaussiana sería intercambiar las filas, así que podemos suponer sin pérdida de generalidad que $a$ no es $0$. De este modo, el primer paso de reducción gaussiana es multiplicar la primer fila por $1/a$ para que el pivote sea $1$: $$\begin{pmatrix} 1 & \frac{b}{a}& \frac{1}{a} & 0\\ c & d & 0 & 1 \end{pmatrix}$$
El siguiente paso es hacer al resto de las entradas en la columna de ese primer pivote iguales a $0$. Para eso basta restar a la segunda fila $c$ veces la primera:
Si $ad-bc=0$, entonces el pivote de la segunda fila ya no quedaría en la segunda columna, y la forma escalonada reducida no tendría a la identidad a la izquierda. Así que una segunda condición para que $A$ sea invertible es que $ad-bc$ no sea cero. Notemos que si $ad-bc$ no es cero, entonces tampoco $a$ y $c$ son simultaneamente $0$, así que nuestra condición anterior ya está capturada con pedir que $ad-bc$ no sea cero.
Sabiendo que $ad-bc$ no es cero, el siguiente paso en la reducción gaussiana es multiplicar la segunda fila por $a/(ad-bc)$ para hacer el pivote igual a $1$:
Finalmente, para que el pivote de la segunda columna sea la única entrada no cero, tenemos que restar a la primera fila la segunda multiplicada por $-b/a$:
Así, basta pedir $ad-bc$ para que la reducción gaussiana deje a la identidad en la matriz de $2\times 2$ de la izquierda y, al terminar el procedimiento, tenemos a la derecha a la inversa de $A$ que es la matriz:
$$\begin{pmatrix} \frac{d}{ad-bc} & -\frac{b}{ad-bc}\\ -\frac{c}{ad-bc} & \frac{a}{ad-bc} \end{pmatrix}=\frac{1}{ad-bc}\begin{pmatrix} d & -b\\ -c & a \end{pmatrix}.$$
Esto es a lo que queríamos llegar. Por supuesto, el camino fue largo y hay formas de llegar al mismo resultado de manera más corta, pero usando más teoría.
¿Ahora qué?
Si te gustó esta entrada, puedes compartirla o revisar otras relacionadas con matemáticas a nivel universitario:
En esta serie de entradas continuaremos platicando acerca de álgebra lineal. Son una continuación a las entradas de Álgebra Lineal I que también se encuentran disponibles en el blog. En el transcurso de ellas, cubriremos los temas que establece el temario de la materia Álgebra Lineal II de la Licenciatura en Matemáticas de la UNAM.
Primero comenzaremos dando un pequeño repaso de lo que se ha visto en Álgebra Lineal I y después daremos un pequeño panorama de lo que se cubrirá en este curso.
Algunos recordatorios de Álgebra Lineal I
En el primer curso de álgebra lineal se establecieron muchos fundamentos del área, relacionados con espacios vectoriales, transformaciones lineales, matrices y más. A continuación damos un breve recordatorio de cada unidad temática. Usaremos letras cursivas para mencionar términos que ya deberías conocer. Si algunos de ellos no los recuerdas. Usaremos letras negritas para hacer énfasis en resultados fundamentales del primer curso, que es muy importante que recuerdes qué dicen y cómo se usan. Todo esto lo puedes encontrar en las notas anteriores.
En la primer parte de ese curso, recordamos las definiciones básicas de vector, matriz y transformación lineal, pero únicamente nos enfocamos en un espacio vectorial muy sencillo: $F^n$, que consiste de todos los vectores con $n$ entradas en un campo $F$. Se definieron operaciones de suma y producto escalar en este espacio. También hablamos de cómo multiplicar matrices. Esto fue suficiente para plantear la idea de resolver sistemas de ecuaciones lineales. Primero estudiamos los sistemas de ecuaciones lineales homogéneos, pues de acuerdo al principio de superposición, esto es suficiente. Luego, vimos el algoritmo de reducción gaussiana, que nos permite llevar cualquier matriz a su forma escalonada reducida. Esto resulta fundamental para calcular todo tipo de cosas en álgebra lineal: resolver sistemas de ecuaciones, invertir matrices, encontrar determinantes, encontrar espacios generados, etc.
En la segunda parte introdujimos el concepto de espacio vectorial en general. Hablamos de $F^n$, pero también del espacio de matrices $M_{m,n}(F)$, del espacio de polinomios $F[x]$, de los espacios de polinomios de grado a lo más $n$, $F_n[x]$, y de algunos otros como los de funciones con ciertas propiedades (continuas, diferenciables, limitadas a un intervalo, acotadas, etc.) A partir de las nociones de combinación lineal, independencia lineal y generadores, desarrollamos la teoría de dimensión. Un resultado crucial en dimensión finita es el lema de Steinitz. Tras hablar de un espacio vectorial, comenzamos a hablar de «funciones bonitas» entre ellos. Las primeras que tratamos fueron las transformaciones lineales. Un resultado crucial es que, en dimensión finita y tras elegir una base cada transformación lineal corresponde a una matriz y viceversa. Como bases distintas dan matrices distintas, fue necesario discutir qué sucede al cambiar de base, por lo que se introdujeron matrices de cambio de base. Otro resultado crucial es el teorema rango-nulidad.
La tercera parte fue mucho más geométrica. En ella hablamos de las formas lineales y de las formas bilineales. A partir de las formas lineales construimos a los espacios duales y desarrollamos la teoría de dualidad. Definimos el concepto de hiperplano. Una de las principales aplicaciones de la teoría de dualidad fue mostrar que en dimensión finita todo subespacio es intersección de hiperplanos. En el caso de formas bilineales, nos enfocamos mucho más en aquellas que van a $\mathbb{R}$. A partir de ellas definimos formas cuadráticas. Estudiamos el caso muy especial de espacios euclideanos, que son, a grandes rasgos espacios vectoriales reales con una forma bilineal «bonita». En este tipo de espacios se puede hablar de normas, distancias y ángulos. Los resultados cruciales fueron la desigualdad de Cauchy-Schwarz y la existencia de bases ortonormales. Para encontrarlas, hablamos del proceso de Gram-Schmidt.
Finalmente, vino la unidad 4 en la que se desarrolló de manera formal el concepto de determinante, tanto para vectores, como para matrices y transformaciones lineales. Para ello fue importante hablar de formas $n$-lineales (que en cierta forma generalizan a las bilineales) con propiedades especiales, como ser alternantes. Se vieron muchas propiedades de los determinantes para entenderlos a profundidad de manera teórica y práctica, en particular la expansión de Laplace. Se vio cómo los determinantes pueden ayudar a resolver sistemas de ecuaciones mediante las fórmulas de Cramer. También, con toda la teoría desarrollada hasta aquí pudimos finalmente entender con mucha profundidad los sistemas de ecuaciones lineales mediante el teorema de Rouché-Capelli. Para cerrar el curso, vimos muy por encima las ideas de eigenvalores, eigenvectores y polinomio característico. Esto nos llevó a la idea de diagonalización. Juntando toda la teoría del curso, llegamos a la cereza del pastel: el teorema espectral para matrices simétricas reales.
La idea general del segundo curso
El teorema espectral para matrices simétricas reales es un resultado precioso: bajo ciertas condiciones nos permite «llevar» una transformación (o matriz) a una «forma sencilla». Nos debe de dar la intuición de que toda la teoría que se desarrolló anteriormente la podemos utilizar para demostrar muchos otros resultados lindos de ese estilo. En Álgebra Lineal II haremos precisamente esto.
En la primer parte del curso profundizaremos en la teoría de eigenespacios, que nos permitirán entender mucho mejor cómo son los eigenvectores. Para hacer eso, será importante introducir un nuevo polinomio: el polinomio mínimo. Mostraremos muchas más propiedades de eigenvectores, eigenvalores, polinomios mínimos y característicos. Usaremos estas ideas para profundizar en las nociones de diagonalización y triangulización y enunciaremos teoremas que nos permitirán saber cuándo una matriz (o transformación) se puede llevar mediante un cambio de base a una forma más sencilla. En esta primer parte también demostraremos el bello teorema de Cayley-Hamilton, que afirma que cualquier matriz se anula en su polinomio característico.
Después de esto, en la segunda parte del curso trabajaremos para entender mejor a las formas bilineales que introdujimos en el primer curso. Ya no sólo nos limitaremos a aquellas que caen a los reales, sino que hablaremos también de aquellas que caen al campo $\mathbb{C}$ de los números complejos. Uno podría pensar que el tratamiento es análogo, pero esto dista mucho de la realidad: se requiere pensar en nuevas definiciones que involucren a los conjugados de las entradas de las matrices.
Tras establecer las propiedades principales que nos interesan en espacios vectoriales sobre $\mathbb{R}$ y $\mathbb{C}$, retomaremos la idea de demostrar teoremas de diagonalización. Ahora tendremos el teorema espectral para matrices reales y el teorema espectral para matrices complejas. Además de garantizarnos una diagonalización, estos teoremas nos garantizan que esa diagonalización es de una forma muy especial. Veremos las consecuencias teóricas que esto tiene.
Finalmente, en la última unidad temática, veremos que aunque las matrices no sean diagonalizables, en realidad no todo está perdido. Hablaremos de la forma canónica de Jordan, que es algo así como una versión débil de diagonalizar. Terminaremos el curso aprovechando todo lo visto hasta ahora para ver que cualquier matriz, sin importar sobre qué campo esté, siempre podrá ser llevada a esta forma tras un cambio de base.
Más adelante…
En la siguiente entrada ya comenzaremos con el contenido teórico del curso. Lo primero que haremos es formalizar qué quiere decir «aplicar un polinomio a una transformación lineal» y qué qué quiere decir aplicarlo a una matriz.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Recuerda el algoritmo de reducción gaussiana y úsalo para determinar si la matriz $\begin{pmatrix} 1 & 5 & 0 \\ 0 & 1 & 2 \\ 5 & 3 & -1\end{pmatrix}$ es invertible y, en caso de que sí, encontrar su inversa. Hazlo a mano y comprueba tu respuesta con alguna calculadora de forma escalonada reducida en línea.
Encuentra una base ortogonal para el espacio de polinomios $\mathbb{R}_4[x]$ de grado a lo más $4$ con producto bilineal $\langle p, q \rangle = \sum_{j=0}^4 p(j)q(j)$. Encuentra la forma matricial de la transformación «derivar» en esta base y da su determinante.
Escribe al subespacio de matrices antisimétricas en $M_3(\mathbb{R})$ como intersección de hiperplanos. ¿Qué dimensión tiene?
Encuentra un sistema de $4$ ecuaciones lineales en $5$ variables cuyo espacio de soluciones tenga dimensión $2$. Después, resuélvelo usando los siguientes dos métodos: reducción gaussiana y fórmulas de Cramer.
Explica qué nos garantiza el teorema espectral visto en el curso anterior para las matrices $A=\begin{pmatrix} 1 & 2 & 3 \\ 2 & 0 & 1 \\ 3 & 1 & 4 \end{pmatrix}$ y $B=\begin{pmatrix} 0 & 1 & -1 \\ 1 & 2 & -4 \\ 0 & 0 & 2 \end{pmatrix}$. Encuentra el polinomio característico de cada una de estas matrices. Esboza (sin hacerlo) cómo encontrarías los valores y vectores propios de $A$ y $B$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
En esta entrada platicaré de un lema muy útil en álgebra lineal, sobre todo cuando se están definiendo las nociones de base y de dimensión para espacios vectoriales de dimensión finita. Se trata del lema de intercambio de Steinitz.
Supondré que el lector ya sabe un poco de álgebra lineal, pero muy poquito. Basta con saber la definición de espacio vectorial. Lo demás lo definiremos sobre el camino.
El nombre del lema es en honor al matemático alemán Ernst Steinitz. Sin embargo, personalmente a mi me gusta pensarlo como el lema del «regalo de vectores», por razones que ahorita platicaremos. El enunciado es el siguiente:
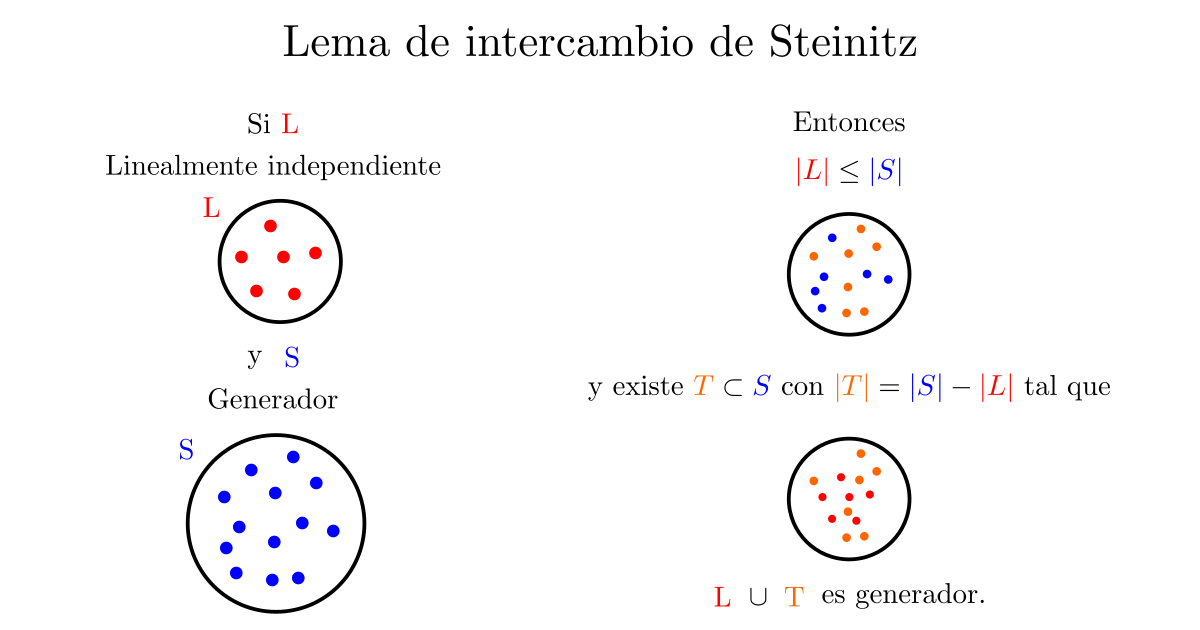
Teorema (Lema de intercambio de Steinitz). Sea $V$ un espacio vectorial. Tomemos un conjunto finito y linealmente independiente $L$ de $V$, y un conjunto finito y generador $S$ de $V$. Supongamos que $L$ tiene $m$ elementos y que $S$ tiene $n$ elementos. Entonces:
$m\leq n$
Se puede tomar un subconjunto $T$ de $S$ de tamaño $n-m$ tal que $L\cup T$ sea generador de $V$.
En pocas palabras, «cualquier conjunto linealmente independiente tiene a lo mucho tantos elementos como cualquier conjunto generador y, además, cualquier generador le puede regalar vectores al linealmente independiente para volverlo generador».
De manera esquemática, está pasando lo siguiente:
Diagrama del lema de intercambio de Steinitz
Lo que haremos es hablar de las definiciones necesarias para entender el lema, hablar de la intuición detrás, dar un par de ejemplos y luego dar la demostración. La presentación está ligeramente basada en el libro de álgebra lineal de Titu Andreescu.
Definiciones e intuición
Sea $V$ un espacio vectorial sobre un campo $F$.
Si tenemos vectores $v_1,\ldots,v_n$ de $V$ y escalares $a_1,\ldots,a_n$ en $F$, podemos considerar al vector formado por multiplicar los vectores por los escalares correspondientes y sumarlos todos, es decir al vector $v$ dado por la expresión $a_1v_1+\cdots+a_nv_n$ . En este caso, decimos que $v$ es una combinación lineal de $v_1,\ldots,v_n$, o a veces que $v_1,\ldots,v_n$ generan a $v$.
Un conjunto $S=\{v_1,v_2,\ldots,v_n\}$ de vectores de $V$ es generador si para cualquier $v$ de $V$ existen escalares $a_1,\ldots,a_n$ en $F$ para los cuales $v=a_1v_1+\cdots+a_nv_n$. Dicho de otra forma, «$S$ es generador si cualquier vector del espacio vectorial es combinación lineal de vectores de $S$».
De esta definición es fácil ver que si $S$ es un conjunto generador y $T$ es un conjunto que contiene a $S$ (es decir, $T\supset S$), entonces $T$ también es generador: simplemente para cualquier $v$ usamos la combinación lineal que tenemos en $S$ y al resto de los vectores (los de $T\setminus S$) les ponemos coeficientes cero.
Un conjunto $L=\{w_1,w_2,\ldots,w_m\}$ de vectores de $V$ es linealmente independiente si la única combinación lineal de vectores de $L$ que da $0$ es aquella en la que todos los escalares son $0$. Dicho de otra forma, «$L$ es linealmente independiente si $a_1w_1+\ldots+a_mw_m=0$ implica que $a_1=a_2=\ldots=a_m=0$.»
Con los conjuntos linealmente independientes pasa lo contrario a lo de los generadores. Si $L$ es un conjunto linealmente independiente y $M$ está contenido en $L$ (es decir, ahora $M\subset L$), entonces $M$ es linealmente independiente. Esto sucede pues cualquier combinación lineal de $M$ también es una combinación lineal de $L$. Como no hay ninguna combinación lineal no trivial de elementos de $L$ que sea igual a cero, entonces tampoco la hay para $M$.
Los párrafos anteriores dejan la idea de que «los conjuntos generadores tienen que ser grandes» y que «los conjuntos linealmente independientes tienen que ser chiquitos». El lema de intercambio de Steinitz es una manera en la que podemos formalizar esta intuición.
Como los conjuntos generadores son «grandes», entonces son bien buena onda y bien generosos. Tienen muchos elementos. Como los conjuntos linealmente independientes son «chiquitos», entonces necesitan elementos. Lo que dice el lema de intercambio de Steinitz es que si tenemos a un generador $S$ y a un linealmente independiente $L$, entonces $S$ tiene más elementos y que puede regalar al linealmente independiente $L$ algunos elementos $T$ para que ahora $L\cup T$ tenga tantos elementos como tenía $S$ y además se vuelva generador. Una cosa importante es que no cualquier subconjunto $T$ funciona. Este tiene que estar bien elegido.
Ejemplo concreto del lema de intercamio de Steinitz
Veamos un ejemplo muy concreto. Supongamos que nuestro espacio vectorial es $\mathbb{R}^3$, osea, los vectores con $3$ entradas reales. Tomemos a los siguientes conjuntos de vectores:
$L=\{(1,2,3), (0,3,0)\}$
$S=\{(0,1,0), (1,0,0), (0,0,-1), (2,4,6)\}$
Por un lado, el conjunto $L$ es linealmente idependiente. Una combinación lineal $a(1,2,3)+b(0,3,0)=(0,0,0)$ implica de manera directa que $a=0$ (por la primer o tercer coordenadas) y de ahí $b=0$ (por la segunda coordenada).
Por otro lado, el conjunto $S$ es generador, pues con $(0,0,-1)$ podemos obtener a $(0,0,1)$ como combinación lineal, de modo que $S$ genera a los tres de la base canónica y por tanto genera a todo $\mathbb{R}^3$.
Notemos que en efecto $L$ tiene menos elementos que $S$. Además, el lema de intercambio de Steinitz garantiza que $S$ puede pasarle $|S|-|L|=4-2=2$ elementos a $L$ para volverlo generador. Pero hay que ser cuidadosos. Si le regala los elementos $(0,1,0)$ y $(2,4,6)$, entonces no funciona (se puede verificar que este conjunto no genera a $\mathbb{R}^3$). Pero si le regala, por ejemplo, los elementos $(1,0,0)$ y $(0,0,-1)$ entonces ahora sí generará (se puede argumentar viendo que entonces ahora genera a los tres de la base canónica).
Demostración del lema de intercambio de Steinitz
Pasemos ahora a la demostración del lema de Steinitz. Lo demostraremos por inducción en la cantidad de elementos que tiene $L$, el linealmente independiente. Si $|L|=m=0$, entonces claramente $m=0\leq n$, y además $S$ le puede pasar $n-0=n$ elementos (todos) a $L$ y volverlo generador.
Supongamos entonces que es cierta la siguiente afirmación.
Hipótesis inductiva Sea $V$ un espacio vectorial. Tomemos un conjunto finito y linealmente independiente $L$ de $V$, y un conjunto finito y generador $S$ de $V$. Supongamos que $L$ tiene $m$ elementos y que $S$ tiene $n$ elementos. Entonces:
$m\leq n$
Se puede tomar un subconjunto $T$ de $S$ de tamaño $n-m$ tal que $L\cup T$ sea generador de $V$.
Para el paso inductivo, tomemos $L=\{w_1,w_2,\ldots,w_m,w_{m+1}\}$ un linealmente independiente de $V$ y $S=\{v_1,v_2,\ldots,v_n\}$ un generador de $V$. Aplicándole la hipótesis inductiva al linealmente independiente $L’=L\setminus \{w_{m+1}\}=\{w_1,\ldots,w_m\}$ y al generador $S$, tenemos que:
$m\leq n$
Se puede tomar un subconjunto $T’=\{s_1,s_2,\ldots,s_{n-m}\}$ de $S$ tal que $L’\cup T’= \{w_1,w_2,\ldots,w_m,s_1,\ldots,s_{n-m}\}$ sea generador de $V$.
Como $L’\cup T’$ es generador, entonces podemos poner a $w_{m+1}$ como combinación lineal de elementos de $L’\cup T’$, es decir, existen $a_1,\ldots, a_m, b_1,\ldots,b_{n-m}$ tales que $$w_{m+1}=a_1w_1+\ldots+a_mw_m+b_1s_1+\ldots+b_{n-m}s_{n-m}.$$
Ya sabemos que $m\leq n$. Si $m=n$, la combinación lineal anterior no tendría ningún $s_i$, y entonces sería una combinación lineal no trivial para los elementos de $L$, lo cual es una contradicción pues $L$ es linealmente independiente. Entonces $m\neq n$ y $m\leq n$, así que $m+1\leq n$, que era el primer punto que queríamos probar.
También, como $L$ es linealmente independiente, no se vale que todos los $b_i$ sean iguales a cero. Sin perder generalidad, podemos suponer que $b_1\neq 0$. Así, $s_1$ se puede despejar como combinación lineal en términos de $w_1,\ldots,w_n,w_{n+1}, s_2,\ldots,s_{n-m}$ y por lo tanto $L\cup (T’\setminus \{s_1\})$ genera lo mismo que $L’\cup T’$, que era todo $V$. Así, $T:=T’\setminus \{s_1\}$ es el subconjunto de $S$ de tamaño $n-(m+1)$ tal que $L\cup T$ es generador. Esto termina la prueba del lema.
Algunas aplicaciones
El lema de intercambio de Steinitz se puede utilizar para probar varias afirmaciones con respecto a bases de un espacio vectorial de dimensión finita.
Un espacio vectorial es de dimensión finita si tiene un conjunto generador con una cantidad finita de elementos. Una base de un espacio vectorial es un conjunto que sea simultáneamente generador y linealmente independiente.
Las siguientes afirmaciones se siguen directamente del lema de Steinitz.
Todas las bases de un espacio vectorial finito tienen la misma cantidad de elementos.
En un espacio vectorial de dimensión $d$:
Todo conjunto linealmente independiente tiene a lo más $d$ elementos.
Todo conjunto generador tiene al menos $d$ elementos.
Si $S$ es un conjunto con $n$ vectores de un espacio vectorial de dimensión $n$, entonces las siguientes tres afirmaciones son equivalentes:
El conjunto $S$ es base.
$S$ es linealmente independiente.
$S$ es generador.
Como primer ejemplo, haremos (1). Tomemos $B_1$ y $B_2$ bases de un espacio vectorial de dimensión finita $B$. Pensando a $B_1$ como linealmente independiente y a $B_2$ como generador, tenemos $|B_1|\leq |B_2|$. Pensando a $B_2$ como linealmente independiente y a $B_1$ como generador, tenemos $|B_2|\leq |B_1|$. Así, $|B_1|=|B_2|$.
Como segundo ejemplo, haremos una parte de (3). Suponiendo que $S$ es un conjunto de $n$ vectores de un espacio vectorial de dimensión $n$, veremos que su independencia lineal implica $S$ es base. Sea $B$ una base de $V$. Por el lema de Steinitz, podemos pasar $|B|-|S|=n-n=0$ elementos de $B$ a $S$ para volverlo generador. Es decir, $S$ ya es generador. Como además es linealmente independiente, entonces es base.
El resto de las demostraciones son igual de sencillas, como puedes verificar.
Más adelante…
El lema de Steinitz es la herramienta clave para definir dar la definición de dimensión de espacios vectoriales en el caso de dimensión finita. Lo usaremos una y otra vez. Por esta razón, es muy recomendable repasar su demostración y entender a profundidad qué dice.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Replica por tu cuenta la demostración del lema de Steinitz hasta que te sientas cómodo con los argumentos.
En el ejemplo que se dio de la aplicación del lema de Steinitz, ¿cuáles son todas las posibilidades de $2$ elementos que se pueden pasar para que $L$ se convierta en generador?
Usa el lema de Steinitz para demostrar el resto de consecuencias que mencionamos.
¿Qué te dice el lema de Steinitz cuando $L$ y $S$ son inicialmente del mismo tamaño?
Muestra que en el lema de Steinitz la hipótesis de que $L$ sea finito no es necesaria, es decir, que incluso sin esta hipótesis se pueden mostrar todas las conclusiones.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104721 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM»
Una de las nociones más importantes en álgebra lineal es la de «matriz invertible». Llamemos $I_n$ a la matriz identidad de $n\times n$, es decir, a la que tiene $1$ en cada entrada de la diagonal principal, y $0$ en las demás.
Una matriz $A$ de $n\times n$ es invertible si existe una matriz $B$ de $n\times n$ tal que $AB=I_n=BA$.
Una consecuencia rápida es que dicha matriz $B$ es única, así que le podemos dar la notación $A^{-1}$. De la definición (y asociatividad) se puede ver rápido que si $A_1$ y $A_2$ son invertibles, entonces su producto $A_1A_2$ también, con inversa $A_2^{-1}A_1^{-1}$, en otras palabras, «producto de invertibles es invertible».
Un detalle curioso de la definición es que pide no sólo que $AB=I_n$, sino que para la misma matriz $B$ también se tenga que $BA=I_n$. Por un lado, a priori esto tiene sentido pues el producto de matrices no es conmutativo, es decir, ocurre a veces que $AB\neq BA$. Sin embargo, como veremos más adelante en esta entrada, en la definición de matriz invertible basta con tener una de estas igualdades.
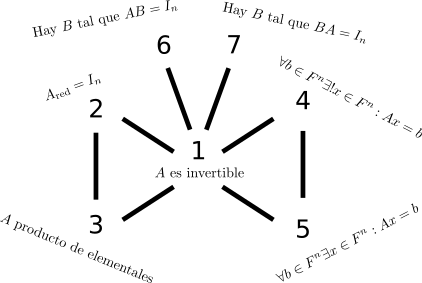
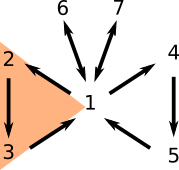
De hecho, la idea de esta entrada es presentar y demostrar varias equivalencias a la afirmación «$A$ es una matriz invertible». La presentación sigue un poco el orden de ideas del capítulo 3.4 del libro Essential Linear Algebra with Applications: A Problem-Solving Approach de Titu Andreescu. La idea es explicar el siguiente diagrama, en donde agrupamos a las equivalencias en grupitos que corresponden a partes de una mariposa:
Algunas definiciones
Antes de enunciar el resultado principal, conviene recordar algunas definiciones y un par de resultados importantes.
Una operación elemental es aplicar a una matriz de las siguientes operaciones:
Intercambio de dos filas.
Multiplicar todas las entradas de alguna de sus filas por un elemento $c$ no cero.
Sumar a una fila un múltiplo de otra fila.
Una matriz elemental es una matriz obtenida de aplicar a $I_n$ exactamente una operación elemental.
Una fila de una matriz es una fila cero si todas sus entradas son iguales a cero. A la primer entrada no cero (de izquierda a derecha) de una fila que no sea fila cero se le llama pivote. Una matriz es escalonada reducida si cumple las siguientes tres propiedades:
Todas las filas cero están hasta abajo.
En todas las filas no cero los pivotes son iguales a $1$.
Si una fila no cero $F_1$ está arriba de otra fila no cero $F_2$, entonces el pivote de $F_1$ está estrictamente a la izquierda del pivote de $F_2$.
Si una entrada tiene al pivote de una fila, entonces todas las demás entradas de la columna son iguales a $0$.
Un resultado (no trivial) es que cualquier matriz se puede llevar a una (y sólo una) matriz escalonada reducida $A_{\text{red}}$ usando únicamente operaciones elementales, a la cual le llamamos su forma escalonada reducida. Estas son todas las definiciones que necesitamos. Estamos listos para pasar al enunciado del teorema principal.
Teorema de la mariposa de equivalencias
Teorema: Sea $A$ una matriz de $n\times n$ con entradas en un campo $F$. Entonces, todas las siguientes afirmaciones son equivalentes:
$A$ es una matriz invertible.
La forma escalonada reducida $A_{\text{red}}$ de $A$ es $I_n$.
$A$ es producto de matrices elementales.
Para todo $b\in F^n$, el sistema de ecuaciones $Ax=b$ tiene una única solución $x\in F^n$.
Para todo $b\in F^n$, el sistema de ecuaciones $Ax=b$ tiene una solución $x\in F^n$.
Existe una matriz $B$ de $n\times n$ tal que $AB=I_n$.
Existe una matriz $B$ de $n\times n$ tal que $BA=I_n$.
Por supuesto, estas no son todas las formas de caracterizar una matriz invertible. Hay otras formas de hacerlo en términos de determinantes, por ejemplo. En el camino recordaremos varias de las definiciones que están en este teorema.
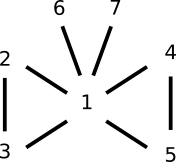
Le llamo el teorema de la mariposa de equivalencias porque podemos agrupar a estos números en tres «grupos» principales de equivalencias «parecidas», que además nos van a recordar cómo va la prueba.
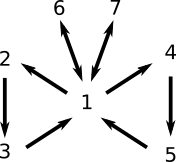
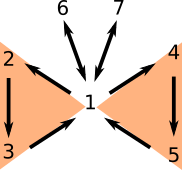
Primero veremos la equivalencia entre 1, 2 y 3 (un ala). Luego, entre 1,4,5 (otra ala). Después, entre 1 y 6 (antena derecha). Finalmente, entre 1 y 7 (antena izquierda).
Un par de lemas auxiliar
Antes de demostrar el teorema de equivalencias, enunciamos y argumentamos dos resultados útiles
Es fácil convencerse de que aplicar una operación elemental a una matriz $A$ es lo mismo que multiplicar a $A$ por la izquierda por la matriz elemental correspondiente a la operación. Como toda matriz $A$ se puede llevar a su forma escalonada reducida mediante operaciones elementales, concluimos lo siguiente.
Lema 1: Para toda matriz $A$ existe una matriz $E$ que es producto de matrices elementales tal que $EA$ es la forma escalonada reducida de $A$, es decir $EA=A_{\text{red}}$.
También es fácil convencerse de que cada matriz elemental es invertible, pues las operaciones elementales se pueden revertir, y la inversa de la matriz elemental $M$ es precisamente la matriz elemental correspondiente a la operación inversa. Además, producto de matrices invertibles es invertible. De este modo, concluimos lo siguiente:
Lema 2: Si $E$ es una matriz que es producto de matrices elementales, entonces $E$ es invertible y también es producto de matrices elementales.
La demostración del teorema de la mariposa
Usaremos el diagrama de la mariposa para demostrar todas las equivalencias. Lo que haremos es probar una implicación por cada una de las siguientes flechas:
Empezamos con el ala izquierda de la mariposa.
(1) implica (2): Tomemos una matriz invertible $A$. Por el Lema 1, existe una matriz producto de elementales tal que $EA=A_{\text{red}}$. Como $E$ y $A$ son invertibles, entonces $A_{\text{red}}$ también es invertible.
Si $A_{\text{red}}$ tuviera una fila cero, digamos la $j$, no sería invertible. Esto sucede ya que para cualquier matriz $B$ de $n\times n$ tendríamos que la fila $j$ de $AB$ también sería cero, y entonces $AB$ nunca sería $I_n$. Como sabemos que $A_{\text{red}}$ es invertible, entonces todas sus filas no son cero y por lo tanto todas tienen pivote. Así, tenemos $n$ pivotes y por lo tanto tiene que haber exactamente un pivote por columna. Como $A_{\text{red}}$ es escalonada reducida, estos pivotes tienen que estar exactamente uno en cada entrada de la diagonal principal. Como además cada pivote es la única entrada no cero de su columna, concluimos que $A_{\text{red}}$ es la identidad.
(2) implica (3): Tomemos una matriz $A$ cuya forma escalonada reducida es la identidad. Por el Lema 1, existe una matriz producto de elementales tal que $EA=A_{\text{red}}=I_n$. Por el Lema 2, $E$ es invertible y $E^{-1}$ es producto de matrices elementales. Multiplicando por $E^{-1}$ a la izquierda a la identidad $EA=I_n$ obtenemos $A=E^{-1}$, es decir, $A$ es producto de matrices elementales.
(3) implica (1): Finalmente, si $A$ es producto de matrices elementales, por el Lema 2 tenemos que $A$ es invertible.
Con esto terminamos la primer ala de la mariposa. Notemos que cierran un ciclo, así que a partir de ahora podemos usar libremente la equivalencia entre 1, 2 y 3. Hagamos la segunda ala.
(1) implica (4): Supongamos que $A$ es invertible y tomemos cualquier $b$ en $F^n$. Notemos que $A^{-1}b$ es solución de $Ax=b$ pues satisface $A(A^{-1}b)=I_n b=b$. Además, si $x$ y $y$ son soluciones de $Ax=b$, tendríamos que $Ax=Ay$ y mutiplicando por $A^{-1}$ a la izquierda tendríamos que $x=y$. De este modo, $Ax=b$ tiene una única solución para todo $b$ en $F^n$.
(4) implica (5): Esta demostración es inmediata. Si $Ax=b$ tiene una única solución, en particular tiene una solución.
(5) implica (1): Supongemos que $Ax=b$ tiene una solución $x$ en $F^n$ para todo $b$ en $F^n$. Afirmamos que esto implica que $A_{\text{red}}x=b$ tiene solución para para todo $b$ en $F^n$. Tomemos una $b$ en $F^n$. Por el Lema 1, hay una matriz invertible $E$ tal que $A_{\text{red}}=EA$. Por hipótesis, existe una solución $x$ para $Ax=E^{-1}b$. Tomemos esa $x$. Notemos que $A_{\text{red}}x=(EA)x=E(Ax)=E(E^{-1}b)=b$. Es decir, justo esa $x$ es solución para $A_{\text{red}}x=b$.
En particular, $A_{\text{red}}x=e_j$ tiene solución para cuando $e_j$ es el vector cuya $j$-ésima entrada es $1$ y las demás cero. Así, es imposible que la $j$-ésima fila de $A_{\text{red}}$ sea cero, ya que en caso contrario $Ax$ siempre tendría $j$-ésima entrada cero y $Ax=e_j$ no tendría solución. Como ya vimos antes, si $A_{\text{red}}$ no tiene filas cero, entonces es la identidad. Por la equivalencia entre (1) y (2) concluimos que $A$ es invertible.
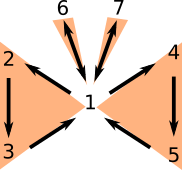
Esto termina las equivalencias en la segunda ala, así que ahora podemos usar libremente las implicaciones entre 1, 2, 3, 4 y 5. Ya nada más nos faltan las antenas.
Por supuesto, las implicaciones (1) implica (6) y (1) implica (7) son triviales, pues la matriz de (1) en particular funciona para (6) y (7). Lo que falta ver son los regresos de estas implicaciones.
(6) implica (1): Supongamos que existe una matriz $B$ tal que $AB=I_n$. Tomemos $b$ en $F^n$. Notemos que $Bb$ es solución de $Ax=b$ pues $A(Bb)=(AB)b=I_nb=b$. De este modo, $Ax=b$ tiene solución para todo $b$ en $F^n$ y por la equivalencia entre (1) y (5) tenemos que $A$ es invertible. Si tomamos a su inversa $A^{-1}$ y la multiplicamos a la izquierda en la hipótesis, obtenemos $B=A^{-1}$, de modo que también $BA=I_n$.
(7) implica (1): Supongamos que existe una matriz $B$ tal que $BA=I_n$. Por la equivalencia entre (1) y (6), tenemos que $B$ es invertible, de inversa $B^{-1}$. De este modo, $A=(B^{-1}B)A=B^{-1}(BA)=B^{-1}I_n=B^{-1}$. De este modo, $A$ es la inversa de una matriz invertible y por tanto es invertible, y por lo tanto $AB=B^{-1}B=I_n$.
¡Listo! Con esto tenemos la equivalencia entre todas las afirmaciones.
¿Ahora qué?
Si te gustó esta entrada, puedes compartirla o revisar otras relacionadas con matemáticas a nivel universitario: