Introducción
En entradas pasadas ya platicamos de espacios vectoriales y de subespacios. También desarrollamos teoría de dimensión para espacios vectoriales de dimensión finita. Para ello, hablamos de conjuntos generadores, de independientes y de bases. Esto nos ayuda a entender a los espacios vectoriales «uno por uno». Lo que queremos entender ahora es cómo interactúan los espacios vectoriales entre sí. Para ello, hablaremos de transformaciones lineales entre espacios vectoriales.
Ya platicamos un poco de transformaciones lineales cuando estudiamos $F^n$ a detalle. En esa parte del curso, vimos cómo cualquier matriz en $M_{m,n}(F)$ se podía ver como una transformación lineal de $F^n$ a $F^m$ y viceversa. Retomaremos varias de estas ideas, pues son fundamentales para esta unidad y las siguientes.
La idea de esta entrada es:
- Dar la intuición y definición de transformaciones lineales en general.
- Probar propiedades básicas de las transformaciones lineales.
- Dar varios ejemplos de transformaciones lineales.
- Dar las definiciones de kernel (o núcleo) y de imagen para una transformación lineal.
- Ver un ejemplo que abarque ambas definiciones.
- Finalmente, probar que el kernel y la imagen son subespacios vectoriales.
A grandes rasgos, las transformaciones lineales se pueden pensar como «funciones bonitas» entre espacios vectoriales que «preservan las operaciones de suma y multiplicación por escalar».
Definición de transformaciones lineales
Definición. Para $V$ y $W$ espacios vectoriales sobre un campo $F$, una transformación lineal entre $V$ y $W$ es una función $T:V\to W$ tal que:
- Para todo $v_1$ y $v_2$ en $V$ se tiene que $T(v_1+v_2)=T(v_1)+T(v_2)$. Esto informalmente se le conoce como que «$T$ abre sumas».
- Para todo $v$ en $V$ y $c$ en el campo $F$ se tiene que $T(cv)=cT(v)$. A esto se le conoce como que «$T$ saca escalares».
En la primer condición la suma de la izquierda (dentro del paréntesis) es «la suma de $V$» y la suma de la derecha es «la suma de $W$». De manera similar, en la segunda condición el producto por escalar de la izquierda (dentro del paréntesis) es el de $V$ y el de la derecha es el de $W$.
En lo que resta de esta entrada, supondremos que los espacios vectoriales son sobre un mismo campo $F$.
Ejemplos de tranformaciones lineales
Ejemplo 1. La función $T:\mathbb{R}^2 \to \mathbb{R}$ dada por $T(x,y)=x+y+1$ no es una transformación lineal. De hecho falla en ambas condiciones. Falla en abrir sumas pues, por ejemplo, $T(1,1)=3$, $T(2,2)=5$, pero $(1,1)+(2,2)=(3,3)$ y $$T(3,3)=7\neq 5 = T(1,1)+T(2,2.)$$ También falla en sacar escalares pues, por ejemplo $$T(4,2)=7\neq 8 = 2T(2,1).$$
$\triangle$
Ejemplo 2. La función $T:\mathbb{R}^3 \to \mathbb{R}^3$ dada por $T(x,y,z)=(2x,2y,2z)$ es una transformación lineal.
Para convencernos de que esto es cierto, notemos que si $v=(x,y,z)$ entonces la transformación está dada por $T(v)=2v$. Ahora, tomemos dos vectores $v_1$ y $v_2$ en $V$, y un real $c$. Tenemos por la asociatividad y conmutatividad de multiplicar por escalares en $\mathbb{R}^3$ que: \begin{align*}T(v_1+v_2)&=2(v_1+v_2)\\&=2v_1+2v_2\\&=T(v_1)+T(v_2),\end{align*} y que $$T(cv_1)=2(cv_1)=c(2v_1)=cT(v_1).$$ Esto muestra que $T$ es transformación lineal.
$\triangle$
Ejemplo 3. De hecho, para cualquier espacio vectorial $V$ sobre el campo $F$ y $c$ un escalar de $F$, la función $T:V\to V$ dada por $T(v)=cv$ es una transformación lineal. El argumento es similar.
$\triangle$
Recuerda que $F_n[x]$ es el espacio vectorial de polinomios con coeficientes en $F$ y grado a lo más $n$. Recuerda también que hemos visto muchos tipos de espacios vectoriales, los $F^n$, los de polinomios, los de matrices, etc. Entre cualesquiera de ellos se pueden tener transformaciones lineales. La única condición es que sean espacios vectoriales sobre el mismo campo $F$.
Ejemplo 4. La función $T:\mathbb{R}^2\to \mathbb{R}_2[x]$ que manda al vector $(a,b)$ al polinomio $x^2+(a-b)x+ab$ no es una transformación lineal. Esto lo podemos verificar viendo que falla la parte de sacar escalares. Por un lado $$2(T(1,1))=2(x^2+1)=2x^2+2,$$ mientras que por otro lado $$T(2,2)=x^2+4,$$ así que $2(T(1,1))\neq T(2,2)$, de modo que $T$ no saca escalares.
$\triangle$
En cambio, si tomamos la función que manda al vector $(a,b)$ al polinomio $ax^2+(a-b)x+a+b$, puedes verificar por tu cuenta que sí es una transformación lineal.
Ejemplo 5. La función $T:M_{2,3}(\mathbb{R})\to \mathbb{R}^3$ que manda a la matriz $$M=\begin{pmatrix}
a & b & c\\
d & e & f
\end{pmatrix}$$ al vector $$T(M):= (a-d, b-e, c-f)$$ es una transfomación lineal.
Veamos que $T$ abre sumas. Tomemos dos matrices $M_1=\begin{pmatrix}
a_1 & b_1 & c_1\\
d_1 & e_1 & f_1
\end{pmatrix}$ y $M_2=\begin{pmatrix}
a_2 & b_2 & c_2\\
d_2 & e_2 & f_2
\end{pmatrix}.$ Por un lado \begin{align*}T(M_1)&=(a_1-d_1,b_1-e_1,c_1-f_1)\\T(M_2)&=(a_2-d_2,b_2-e_2,c_2-f_2),\end{align*} de modo que sumando los vectores y reacomodando tenemos que $$T(M_1)+T(M_2)=((a_1+a_2)-(d_1+d_2),(b_1+b_2)-(e_1+e_2),(c_1+c_2)-(f_1+f_2)).$$
Por otro lado, si primero sumamos las matrices, obtenemos la matriz $$M_1+M_2=\begin{pmatrix}
a_1+a_2 & b_1+b_2 & c_1+c_2\\
d_1+d_2 & e_1+e_2 & f_1+f_2
\end{pmatrix}.$$
Así, $$T(M_1+M_2)=((a_1+a_2)-(d_1+d_2),(b_1+b_2)-(e_1+e_2),(c_1+c_2)-(f_1+f_2)).$$ Esto muestra que $T(M_1+M_2)=T(M_1)+T(M_2)$, es decir, que $T$ abre sumas. Con un argumento parecido se puede mostrar que saca escalares.
$\triangle$
Ejemplo 6. La función $T:\mathbb{R}^2\to \mathbb{R}_2[x]$ que manda al vector $(a,b)$ al polinomio $T(a,b)=(a+b)x^2+(a-b)x+b$ es una transformación lineal.
$\triangle$
Recuerda que $C[0,1]$ es el espacio vectorial de funciones $f:[0,1]\to \mathbb{R}$ continuas.
Ejemplo 7. La función $T:C[0,1]\to \mathbb{R}$ que manda a la función $f$ al real $$T(f):=\int_0^1 f(x)\, dx$$ es una transformación lineal. En efecto, para dos funciones $f$ y $g$ continuas en el $[0,1]$ y un real $c$ se tiene por definición de suma de funciones, de multiplicación por escalar y de propiedades de la integral que \begin{align*}\int_0^1 (f+g)(x)\, dx&=\int_0^1 f(x)+g(x)\, dx\\&=\int_0^1 f(x) \, dx+\int_0^1 g(x)\, dx\end{align*} y que \begin{align*}\int_0^1 (cf)(x)\, dx &= \int_0^1 cf(x)\, dx \\&=c \int_0^1 f(x)\, dx.\end{align*}
En otras palabras, $T(f+g)=T(f)+T(g)$ y $T(cf)=cT(f)$.
$\triangle$
Propiedades básicas de transformaciones lineales
La definición de «transformación lineal» pide dos cosas por separado: abrir sumar y sacar escalares. Es bueno tenerlas por separado para referirnos a ellas individualmente. Sin embargo, la siguiente proposición nos ayuda a probar de manera más práctica que $T$ es una transformación lineal.
Proposición (verificación abreviada). Sean $V$ y $W$ espacios vectoriales sobre un mismo campo $F$. $T:V\to W$ es una transformación lineal si y sólo si para todo $v_1,v_2$ en $V$ y $c$ en $F$ se tiene que $$T(cv_1+v_2)=cT(v_1)+T(v_2).$$
Demostración. En efecto, si $T$ es transformación lineal, entonces $T(cv_1)=cT(v_1)$ porque $T$ saca escalares y así \begin{align*}T(cv_1+v_2)&=T(cv_1)+T(v_2)\\&=cT(v_1)+T(v_2).\end{align*} Por otro lado, si se cumple $T(cv_1+v_2)=cT(v_1)+T(v_2)$ para todos $v_1$ y $v_2$ vectores en $V$ y $c$ escalar en $F$, entonces con $v_2=0$ recuperamos que $T$ saca escalares y con $c=1$ recuperamos que $T$ abre sumas.
$\square$
Las transformaciones lineales mandan al cero de un espacio vectorial al cero del otro.
Proposición (cero va a cero). Sean $V$ y $W$ espacios vectoriales sobre un mismo campo. Si $T:V\to W$ es una transformación lineal, entonces $T(0)=0$.
Demostración. El truco es encontrar $T(0+0)$ de dos formas distintas. Por un lado, como $0+0=0$, tenemos que $T(0+0)=T(0)$. Por otro lado, como $T$ abre sumas, tenemos que $T(0+0)=T(0)+T(0)$. Así, tenemos que $$T(0)+T(0)=T(0).$$ Restando $T(0)$ de ambos lados obtenemos $T(0)=0$.
$\square$
De hecho, hay otra forma de probar la proposición anterior usando que $T$ saca escalares: $T(0)=T(0\cdot 0)=0T(0)=0$. Piensa en por qué cada una de estas igualdades se vale y por qué adentro del paréntesis que hay dos ceros, uno de ellos es vector y el otro escalar.
Las transformaciones lineales también «respetan» inversos aditivos.
Proposición (inversos aditivos van a inversos aditivos). Sean $V$ y $W$ espacios vectoriales sobre un mismo campo. Si $T:V\to W$ es una transformación lineal, entonces $T(-v)=-T(v)$.
La demostración es sencilla y la puedes pensar por tu cuenta.
El haber enunciado estas proposiciones nos puede ayudar para decir, de golpe, que algunas funciones no son transformaciones lineales: si una función falla en tener alguna de las propiedades anteriores, entonces no es transformación lineal.
Ejemplo 1. Sea $V$ el espacio vectorial $\mathbb{R}^2$ y $W$ el espacio vectorial de matrices de $2\times 2$ con entradas complejas, pero visto como espacio vectorial sobre $\mathbb{R}$ (sólo se permite usar reales para la multiplicación escalar).
La transformación $T:V\to W$ que manda al vector real $(a,b)$ a la matriz de entradas complejas $T(a,b)=\begin{pmatrix}
a+ib & a-ib \\
a-ib & 1+abi\end{pmatrix}$ no es una transformación lineal pues manda al $(0,0)$ a la matriz $\begin{pmatrix}
0 & 0 \\
0 & 1\end{pmatrix},$ la cual no es la matriz $0$.
$\triangle$
Sin embargo, una pequeña advertencia. Es posible que $T$ sí mande el $0$ al $0$, pero que de cualquier forma no sea una transformación lineal, debido a que falle por otras razones.
Ejemplo 2. La transformación $T:\mathbb{R}^3 \to \mathbb{R}^3$ dada por $$T(x,y,z)=(x+y+z,xy+yz+zx,xyz)$$ cumple que $T(0,0,0)=(0,0,0)$, pero no es una transformación lineal pues no saca escalares. Por ejemplo, $$T(3,3,3)=(9,27,27)\neq 3(3,3,1)= 3T(1,1,1).$$
$\triangle$
Kernel e imagen de una transformación lineal
Tomemos $T:V\to W$ una transformación lineal. Hay dos conjuntos muy importantes relacionados con $T$.
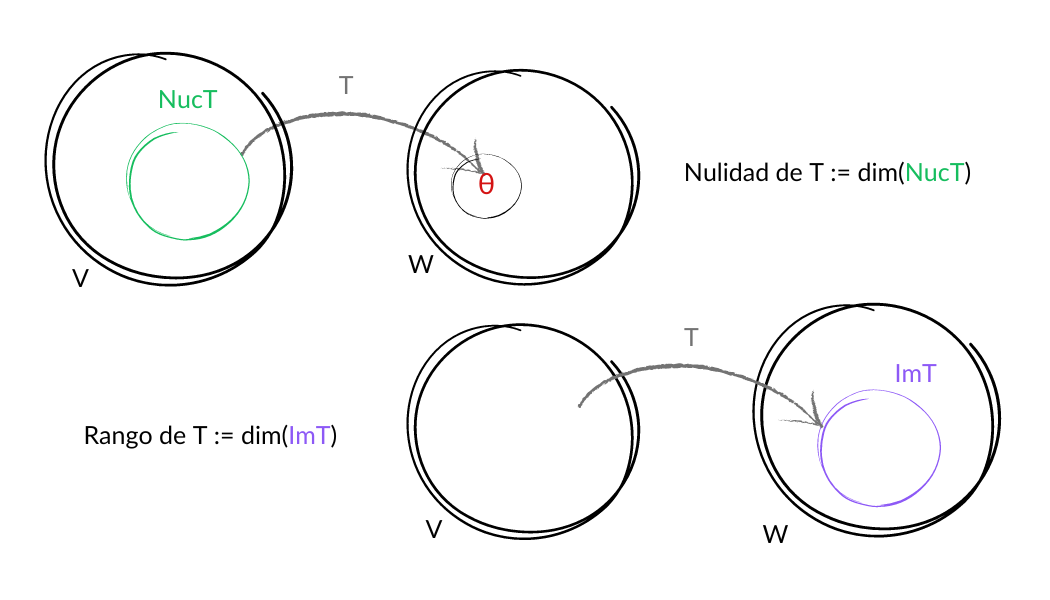
El kernel (o núcleo) de $T$ es el conjunto de vectores en $V$ que se van al vector $0$ de $W$ cuando les aplicamos $T$. En símbolos, $$\ker(T)=\{v\in V: T(v)=0\}.$$
La imagen de $T$ son los vectores en $W$ que se pueden escribir de la forma $T(v)$ para algún $v$ en $V$, es decir, es la imagen en el sentido clásico de teoría de conjuntos o de cálculo. En símbolos, $$\Ima(T)=\{T(v): v\in V\}.$$
Haciendo énfasis de nuevo: $\ker(T)$ es un subconjunto de vectores de $V$ e $\Ima(T)$ es un subconjunto de vectores de $W$. Veamos un ejemplo que nos ayudará a repasar varios de los conceptos clave de esta entrada.
Problema. Consideremos la transformación $T:M_2(\mathbb{R})\to M_{2,3}(\mathbb{R})$ dada por $$T\begin{pmatrix}a & b \\ c & d\end{pmatrix}=\begin{pmatrix}a & b \\ c & d \end{pmatrix} \begin{pmatrix}
1 & 1 & 1\\
1 & 1 & 1\end{pmatrix}.$$
Muestra que $T$ es una transformación lineal y determina $\ker(T)$ e $\Ima(T)$.
Intenta resolver este problema por tu cuenta antes de seguir.
Solución. Sean $A$ y $B$ matrices de $2\times 2$ con entradas reales y $r$ un real. Nombremos $C=\begin{pmatrix}
1 & 1 & 1\\
1 & 1 & 1\end{pmatrix}$. Por propiedades de producto de matrices, tenemos que \begin{align*}T(rA+B)&=(rA+B)C \\ &=r(AC)+BC\\ &=rT(A)+T(B),\end{align*} así que por la proposición de verificación abreviada, tenemos que $T$ es una transformación lineal.
Ahora, tomemos una matriz $A=\begin{pmatrix}
a & b \\
c & d \end{pmatrix}$ y notemos al hacer la multiplicación de manera explícita, obtenemos que $T(A)$ es la matriz $$\begin{pmatrix}
a+b & a+b & a+b\\
c+d & c+d & c+d \end{pmatrix}.$$
Determinemos quién es $\Ima(T)$. Para que una matriz $M:=\begin{pmatrix}
e & f & g\\
h & i & j \end{pmatrix}$ esté en la imagen de $T$, se tiene que cumplir que $e=f=g$ y que $h=i=j$.
Y viceversa, si $e=f=g$ y $h=i=j$, entonces $M$ está en la imagen de $T$ pues, por ejemplo $$T\begin{pmatrix}
e & 0\\
h & 0 \end{pmatrix}=\begin{pmatrix}
e & e & e\\
h & h & h\end{pmatrix}=M.$$
Esto muestra que $$\Ima (T) = \left\{\begin{pmatrix}
e & e & e\\
h & h & h \end{pmatrix}: e,h \in \mathbb{R}\right\}.$$
Ahora determinemos quién es $\ker(T)$. Para que $A$ esté en el kernel de $T$, necesitamos que todas las entradas de $T(A)$ sean $0$. Para esto es suficiente y necesario que $a+b=0$ y que $c+d=0$, o dicho de otra forma, que $A$ sea de la forma $A=\begin{pmatrix}
a & -a \\
c & -c \end{pmatrix}$. Así, concluimos que $$\ker(T)=\left\{\begin{pmatrix}
a & -a \\
c & -c \end{pmatrix}: a,c \in \mathbb{R}\right\}.$$
$\square$
Con esto ya terminamos lo que pide el problema. Sin embargo, hagamos una observación clave. En el problema anterior, $\ker(T)$ e $\Ima(T)$ no solamente son subconjuntos de $M_2(\mathbb{R})$ y de $M_{2,3}(\mathbb{R})$ respectivamente, sino que además son subespacios. Esto no es casualidad.
Los kernels e imágenes de transformaciones lineales son subespacios
Teorema. Sean $V$ y $W$ espacios vectoriales sobre un mismo campo. Si $T:V\to W$ es una transformación lineal, entonces $\ker(T)$ es un subespacio de $V$ e $\Ima(T)$ es un subespacio de $W$.
Demostración. Demostraremos primero que $\ker(T)$ es un subespacio de $V$. Para ello basta con tomar $v_1,v_2$ en $\ker(T)$ y $c$ en el campo $F$ y mostrar que $cv_1+v_2$ también está en $\ker(T)$, es decir, que también sucede que $T(cv_1+v_2)=0$. Esto se debe a la siguiente cadena de igualdades, que justificamos abajo \begin{align*}
T(cv_1+v_2)&=T(cv_1)+T(v_2)\\
&=cT(v_1)+T(v_2)\\
&=c\cdot 0 + 0 \\
&= 0.
\end{align*}
La primera igualdad se debe a que $T$ abre sumas. La segunda a que $T$ saca escalares. La tercera a que $v_1$ y $v_2$ están en el kernel de $T$ y por lo tanto sabemos que $T(v_1)=T(v_2)=0$. La última es simplemente hacer la operación. Con esto mostramos que $\ker(T)$ es un subespacio de $V$.
Ahora, veremos que $\Ima(T)$ es un subespacio de $W$. Tomemos $w_1$ y $w_2$ en $\Ima(T)$, y un escalar $c$ en el campo $F$. De nuevo, basta mostrar que $cw_1+w_2$ está en $\Ima(T)$. Como $w_1$ y $w_2$ están en la imagen de $T$, esto quiere decir que existen vectores $v_1$ y $v_2$ en $V$ tales que $T(v_1)=w_1$ y $T(v_2)=w_2$. Notemos que entonces:
\begin{align*}
cw_1+w_2&=cT(v_1)+T(v_2)\\
&=T(cv_1)+T(v_2)\\
&=T(cv_1+v_2).
\end{align*}
La segunda y tercera igualdad vienen de que $T$ saca escalares y abre sumas respectivamente. Esta cadena de igualdades muestra que podemos poner a $cw_1+w_2$ como imagen de alguien en $V$ bajo $T$, es decir, que $cw_1+w_2$ pertenece a $\Ima(T)$. Esto es lo que queríamos mostrar.
$\square$
Más adelante…
En esta entrada definimos los conceptos de transformación lineal, de imagen y de kernel. También vimos que la imagen y kernel de transformaciones lineales son subespacios. Más adelante veremos que $\ker(T)$ e $\Ima(T)$ están de hecho relacionados más profundamente.
Por ahora, nota que en el ejemplo antes del teorema tenemos que $\begin{pmatrix}
1 & 1 & 1\\
0 & 0 & 0 \end{pmatrix}$ y $\begin{pmatrix}
0 & 0 & 0\\
1 & 1 & 1 \end{pmatrix}$ forman una base de $\Ima(T)$ pues son linealmente independientes y todo elemento en la imagen es combinación lineal de estas matrices. Además, nota que de manera similar $\begin{pmatrix}
1 & -1 \\
0 & 0 \end{pmatrix}$ y $\begin{pmatrix}
0 & 0 \\
1 & -1 \end{pmatrix}$ forman una base de $\ker(T)$.
Esto nos dice que $\dim(\Ima(T))=2$ y que $\dim(\ker(T))=2$. Si sumamos ambos, nos da la dimensión de $M_2(\mathbb{R})$. ¿Será casualidad?
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
- Verifica que las transformaciones lineales que se pusieron como ejemplo en efecto abren sumas y sacan escalares.
- Asegúrate de entender los detalles de la prueba de la proposición de la verificación abreviada. Úsala para mostrar que la función que manda al vector $(a,b,c)$ a la matriz $$\begin{pmatrix} a & b & c \\ c & a & b \\ b & c & a \end{pmatrix}$$ es una transformación lineal de $\mathbb{R}^3$ a $M_3(\mathbb{R})$.
- Muestra la proposición de que inversos aditivos van a inversos aditivos.
- Determina el kernel y la imagen de las transformaciones lineales $T:V\to W$ que se dieron como ejemplo.
- Para cada kernel e imagen que encuentres, convéncete de que son subespacios. Determina si tienen dimensión finita y, en ese caso, determina la dimensión. Para estos casos, ¿cómo están relacionados $\dim(\Ima(T)),\dim(\ker(T)),\dim(V)$?
Entradas relacionadas
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104721 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM»