
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
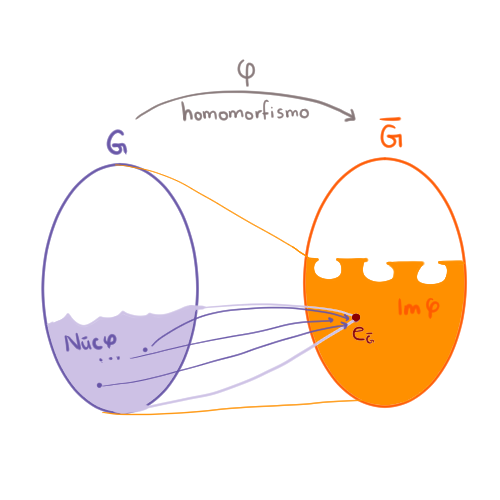
Estamos trabajando con homomorfismos, que son funciones entre dos grupos que respetan sus operaciones. Entre las propiedades que vimos, está que el neutro del dominio siempre va al neutro del codominio. Es decir, al menos hay un elemento que, bajo el homomorfismo, cae en el neutro del codominio.
Para esta entrada consideraremos a la colección de todos los elementos del dominio que van al neutro del codominio. A este subconjunto, lo llamamos el núcleo de $\varphi$. Por otro lado, podemos tomar todos los elementos del dominio, aplicarles $\varphi$ y tomar el subconjunto que resulta en el codominio, a esto le llamamos la imagen de $\varphi$. Estos dos subconjuntos van a ser importantes en el estudio de los homomorfismos.
El núcleo y la imagen de un homomorfismo
Comencemos definiendo formalmente los subconjuntos.
Definición. Sean $G, \bar{G}$ grupos y $\varphi: G \to \bar{G}$ un homomorfismo. Definimos al núcleo de $\varphi$ como
\begin{align*}
\text{Núc } \varphi = \{g\in G | \varphi(g) = e_{\bar{G}}\}.
\end{align*}
Es decir, es el conjunto de todos los elementos de $G$ que, bajo $\varphi$ van a dar al neutro de $\bar{G}$.
Notación. Es común, por el nombre en alemán, denotar al $\text{Núc } \varphi$ como $\text{Ker }\varphi$, es llamado el Kernel de $\varphi$.
Definición. La imagen de $\varphi$ es
\begin{align*}
\text{Im } \varphi = \{\varphi(g) | g \in G\}.
\end{align*}
Notemos que $\text{Núc }\varphi \subseteq G$ y $\text{Im }\varphi \subseteq \bar{G}$.
Ejemplos.
Ejemplo 1. Tomemos el homomorfismo $\varphi: S_n \to \{+1,-1\}$ con $\varphi(\alpha) = sgn\, \alpha$ para toda $\alpha\in S_n$. Veamos quién es el núcleo de $\varphi$:
\begin{align*}
\text{Núc }\varphi &= \{\alpha\in S_n | \varphi(\alpha) = +1\} \\
&= \{\alpha\in S_n | sgn\in\alpha = +1\} = A_n.
\end{align*}
Si tomamos el caso no trivial, con $n>1$,
\begin{align*}
\text{Im }\varphi = \{+1,-1\}.
\end{align*}
Ya que $\varphi((1)) = 1$ y $\varphi((1\,2)) = -1$.
Ejemplo 2. Sea $n \in \z^+$. Consideremos el homomorfismo $\varphi: \z \to \mathbb{C}^*$ con
\begin{align*}
\varphi(m) = \left(e^{\frac{2\pi i}{n}}\right)^m \quad \forall m\in \z.
\end{align*}
Buscamos describir su núcleo y su imagen.
\begin{align*}
\text{Núc }\varphi &= \{m\in \z| \varphi(m) =1\}\\
&= \{m\in\z | \left(e^{\frac{2\pi i}{n}}\right)^m = 1\} = n\z.
\end{align*}
La última igualdad se da porque ya sabemos que $e^{2\pi i} = 1$, más aún $e^{\theta i} = 1$ si y sólo si $\theta$ es un múltiplo de $2\pi$, entonces $ \left(e^{\frac{2\pi i}{n}}\right)^m = 1$ si y sólo si $m$ es un múltiplo de $n$.
Ahora la imagen:
\begin{align*}
\text{Im }\varphi &= \{\varphi(m)| m \in \z\} \\
&= \{\left(e^{\frac{2\pi i}{n}}\right)^m | m\in \z\} = \left< e^{\frac{2\pi i}{n}}\right>.
\end{align*}
El núcleo y la imagen son subgrupos
Ahora, probaremos que el núcleo y la imagen de un homomorfismo no son sólo subconjuntos del dominio y codominio respectivamente, si no que son subgrupos.
Teorema. Sean $G, \bar{G}$ grupos y $\varphi:G\to\bar{G}$ un homomorfismo.
- $\text{Núc }\varphi \unlhd G$.
- $\text{Im }\varphi \leq \bar{G}$.
- $\varphi$ es un monomorfismo si y sólo si $\text{Núc }\varphi = \{e_G\}$.
Demostración.
Sean $G,\bar{G}$ grupos y $\varphi: G \to \bar{G}$ un homomorfismo.
- P.D. $\text{Núc }\varphi \unlhd G$.
Primero probaremos que $\text{Núc }\varphi \leq G$.
Como $\varphi$ es un homomorfismo, $\varphi(e_G) = e_{\bar{G}}$. Entonces $e_G \in \text{Núc }\varphi$.
Sea $a,b\in\text{Núc }\varphi$. Entonces,
\begin{align*}
\varphi(ab^{-1}) &= \varphi(a) \varphi(b^{-1}) &\varphi \text{ es un homomorfismo}\\
&=\varphi(a)(\varphi(b))^{-1} & \text{Proposición de homomorfismo} \\
&= e_{\bar{G}}e_{\bar{G}}^{-1} = e_{\bar{G}} & a,b \in \text{Núc }\varphi.
\end{align*}
Entonces $ab^{-1} \in \text{Núc }\varphi$. Por lo tanto $\text{Núc }\varphi \leq G$.
Además, si $a\in G$ y $n\in\text{Núc }\varphi$, se tiene que:
\begin{align*}
\varphi(ana^{-1}) &= \varphi(a)\varphi(n)\varphi(a^{-1}) &\varphi\text{ es un homomorfismo}\\
&= \varphi(a)\varphi(n)(\varphi(a))^{-1} &\text{Proposición}\\
& = \varphi(a) e_{\bar{G}}(\varphi(a))^{-1} &n \in \text{Núc }\varphi \\
&= \varphi(a) (\varphi(a))^{-1} = e_{\bar{G}} .
\end{align*}
Así, $ana^{-1}\in \text{Núc }\varphi$. Esto nos dice que el núcleo de $\varphi$ es cerrado bajo conjugación. Por lo tanto $\text{Núc } \varphi \unlhd G$.
$\newline$ - P.D. $\text{Im }\varphi \leq \bar{G}$.
Primero veamos que el neutro de $\bar{G}$ está en $\text{Im }\varphi$. Esto pasa porque
$$e_{\bar{G}} = \varphi(e_{G}) \in \text{Im }\varphi.$$
Ahora, si $c,d\in \text{Im }\varphi$, entonces $c = \varphi(a), d = \varphi(b)$ para algunos $a,b\in G$.
\begin{align*}
ad^{-1} = \varphi(a)(\varphi(b))^{-1} &= \varphi(a)\varphi(b^{–1}) &\text{Proposición}\\
&= \varphi(ab^{-1}) \in \text{Im }\varphi &\varphi\text{ es un homomorfismo.}
\end{align*}
Por lo tanto $\text{Im }\varphi \leq \bar{G}$.
$\newline$ - P.D. $\varphi$ es un monomorfismo si y sólo si $\text{Núc }\varphi = \{e_G\}$.
$|\Rightarrow]$ Supongamos que $\varphi$ es un monomorfismo (un homomorfismo inyectivo).
Como $\text{Núc }\varphi \leq G$, entonces $\{e_G\}\subseteq \text{Núc }\varphi$.
Ahora, si $g\in \text{Núc }\varphi$, por la proposición anterior,
\begin{align*}
\varphi(g) = e_{\bar{G}} = \varphi(e_G).
\end{align*}
Y como $\varphi$ es inyectiva, $g = e_G$. Por lo tanto, $\text{Núc }\varphi = \{e_G\}$.
$[\Leftarrow|$ Supongamos que $\text{Núc }\varphi =\{e_G\} $.
Sean $a,b\in G$ tales que $\varphi(a) = \varphi(b)$. Entonces,
\begin{align*}
e_{\bar{G}} &= \varphi(b)(\varphi(a))^{-1} \\
&= \varphi(b)\varphi(a^{-1}) &\text{Proposición}\\
&= \varphi(ba^{-1}) &\varphi\text{ es un homomorfismo.}
\end{align*}
Entonces $ba^{-1} \in \text{Núc }\varphi = \{e_G\}$, así $ba^{-1} = e_G$, esto implica que $b = a$.
Por lo tanto $\varphi$ es un monomorfismo.
$\blacksquare$
Observemos que el inciso 3 del teorema nos da una herramienta para determinar si un homomorfismo es inyectivo o no usando el núcleo.
Proyección Canónica
Ahora, tomando un grupo y un subgrupo normal, definiremos un epimorfismo de un grupo al grupo cociente.
Proposición. Sean $G$ un grupo y $N$ un subgrupo normal de $G$. La función $\pi :G\to G/N$ con $\pi(a) = aN$ para toda $a\in G$, es un epimorfismo tal que $\text{Núc }\pi = N$.
Esta función se conoce como la proyección canónica.
Demostración.
Sean $G$ un grupo, $N\unlhd G$ y $\pi: G\to G/N$ con $\pi(a) = aN$ para cualquier $a\in G$.
Veamos que $\pi$ es un homomorfismo
Sean $a,b \in G$. Entonces
\begin{align*}
\pi(ab) = abN = (aN)(bN) = \pi(a)\pi(b).
\end{align*}
Ahora veamos que es suprayectivo. Esto es debido a que dado $aN\in G/N$, $$aN = \pi(a).$$
Por lo tanto $\pi$ es un epimorfismo.
Finalmente,
\begin{align*}
\text{Núc }\pi = \{a\in G| \pi(a) = e_{G/N}\} = \{a\in G| aN = N\} = N.
\end{align*}
$\blacksquare$
Ahora veamos un corolario que se desprende directamente de lo que acabamos de ver.
Corolario. Todo subgrupo normal es el núcleo de un homomorfismo. De hecho, es el núcleo de un epimorfismo.
Ejemplos
Para terminar veamos unos ejemplos
Ejemplo 1. Tomemos $\varphi:(\r,+) \to (\mathbb{C}^*, \cdot)$ con $\varphi(x) = e^{xi}$ para toda $x\in\r$. Toma 2 minutos para pensar porqué es un homomorfismo.
Veamos el núcleo y la imagen de $\varphi$:
\begin{align*}
\text{Núc }\varphi &= \{x\in\r | \varphi(x) = 1\} \\
&= \{x\in\r | e^{xi} = 1\} \\
&= \{2\pi n | n \in \z\} = \left< 2\pi\right>.\\\\
\text{Im }\varphi &= \{\varphi(x) | x \in \r\} \\
& =\{e^{xi} | x\in\r\} \\
&= \{z\in \mathbb{C} | |z| = 1\} = \s^1.
\end{align*}
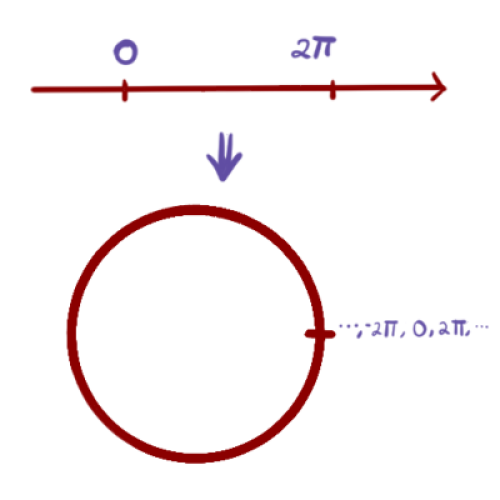
¿Cómo es $\r/\left<2\pi\right>$?
Tomemos $a,b\in \r$. Entonces,
\begin{align*}
a + \left< 2\pi\right> = b + \left< 2\pi\right> &\Leftrightarrow a-b \in \left< 2\pi\right> \\
&\Leftrightarrow a-b= 2\pi n,\, n\in \z.
\end{align*}
Si lo anterior nos dice que dos números $a,b$ están en la misma clase si y sólo si difieren por un múltiplo de $2\pi$. Si lo pensamos en la recta numérica, nos dice que el $0$ y $2\pi$ quedan indentificados en la misma clase. Intuitivamente podríamos pensar que estamos doblando la recta numérica para obtener una circunferencia donde $0$ y $2\pi$ están en el mismo punto.
Así, $\r/\left< 2\pi\right> = \{a+\left< 2\pi\right> | a\in [0,2\pi)\}$.
Ejemplo 2. Consideremos $\varphi: (\r^*,\cdot)\to (\r^*,\cdot)$ con $\varphi(x) = |x|$ para toda $x \in \r^*$ (recuerda que $\r^*=\r\setminus \{0\}$).
\begin{align*}
\text{Núc }\varphi &= \{x\in\r^* | \varphi(x) = 1\} \\
&= \{x\in\r^*| |x| = 1\} = \{+1,-1\}.\\\\
\text{Im }\varphi &= \{\varphi(x) | x \in \r^*\} \\
& =\{|x| | x\in\r^*\} = \r^+. \\
\end{align*}
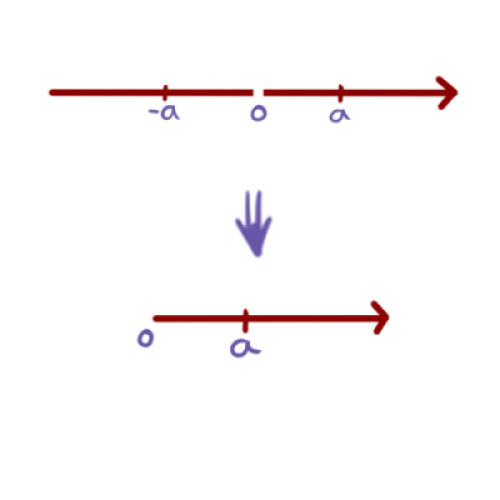
¿Cómo es $\r^*/\{+1,-1\}$?
Tomemos $a,b\in \r^*$.
\begin{align*}
a\{+1,-1\}= b\{+1,-1\} &\Leftrightarrow a^{-1}b \in \{+1,-1\} \\
&\Leftrightarrow a^{–1}b=\pm 1 \Leftrightarrow b = \pm a.
\end{align*}
Entonces, dos clases laterales van a ser iguales si y sólo si sus representantes difieren a lo más sólo por el signo.
Lo que hicimos fue tomar a los reales sin el cero y estamos identificando a cada número real $a$ con su inverso aditivo. Entonces la imagen de $\varphi$ en realidad es como si dobláramos la recta por el 0 e identificamos a los reales negativos con su correspondiente positivo.
Así, $\r^*/ \{+1,-1\} = \{a \{+1,-1\} | a\in \r^+\}$.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
- Sea $\varphi:GL(2,\r) \to \r^*$ el homomorfismo tal que $\varphi(A) = \text{det }A$. Encuentra el núcleo y la imagen de $\varphi$.
- Sean $G,\bar{G}$ grupos y $\varphi: G\to\bar{G}$ un homomorfismo. ¿Es $ \text{Im }\varphi$ normal en $\bar{G}$? Prueba o da un contraejemplo.
- Sean $G,\bar{G}$ grupos y $\varphi: G\to \bar{G}$ un homomorfismo. Sean también, $H\leq G, \bar{H}\leq \bar{G}$.
- ¿Qué puedes decir de $\varphi[H] = \{\varphi(h) | h \in H\}$?¿Y si $H\unlhd G$?
- ¿Qué puedes decir de $\varphi^{-1}[\bar{H}] = \{g\in G| \varphi(g) \in \bar{H}\}$? ¿Y si $\bar{H}\unlhd\bar{G}$?
- En cada inciso calcula $\text{Núc } \varphi, \text{Im }\varphi, G/\text{Núc}$ y analiza cómo se relacionan:
- $G$ grupo, $\varphi: G \to G$, con $\varphi =\text{id}_G $.
- $G$ grupo, $\varphi: G \to G$, con $\varphi(g) = e_G$ para toda $g\in G$.
- $\varphi: (\mathbb{C}^*, \cdot) \to (\r^*, \cdot)$, con $\varphi(z) = |z|$ para toda $z\in\mathbb{C}^*$.
- $\varphi: \z \times \z \to \z\times\z$, con $\varphi(x,y) = (x,0)$ para toda $(x,y)\in \z\times\z$.
Más adelante…
Ahora que ya tenemos muy claras las definiciones de núcleo e imagen de un homomorfismo, comenzaremos a ver teoremas que relacionan lo que vimos aquí con isomorfismos y grupo cociente.
Entradas relacionadas
- Ir a Álgebra Moderna I.
- Entrada anterior del curso: Propiedades de Homomorfismo.
- Siguiente entrada del curso: Primer Teorema de Isomorfía y Diagrama de Retícula.
- Resto de cursos: Cursos.