En la entrada anterior consideramos nuevamente el sistema de ecuaciones que modelaba el movimiento de un péndulo, en este caso con fricción, de la forma $$\begin{array}{rcl} \dot{x} & = & y \\ \dot{y} & = & -\sin{x}-y \end{array}$$ y analizamos las diferencias que existen entre este sistema y el que modela al péndulo simple (sin fricción), entre ellas que el nuevo sistema ya no es hamiltoniano. Sin embargo, la función hamiltoniana $H(x,y)=\frac{1}{2}y^{2}-\cos{x}+1$ que define al sistema del péndulo simple fue útil para esbozar el plano fase del sistema con fricción.
Lo anterior nos motivó a estudiar a un conjunto de funciones que compartieran las mismas propiedades de $H$, en función de los sistemas de ecuaciones y sus puntos de equilibrio. A dichas funciones $L$ las llamamos funciones de Lyapunov. Estudiamos sus propiedades y establecimos el teorema de estabilidad de Lyapunov que nos indica la estabilidad de puntos de equilibrio cuando el sistema admite una función de Lyapunov.
En esta entrada estudiaremos un tipo particulas de sistemas para los cuales es relativamente sencillo encontrar una función de Lyapunov, bajo ciertas hipótesis que deben cumplir los puntos de equilibrio del sistema. Tales sistemas son llamados sistemas gradiente y son de la forma $$\dot{\textbf{X}}=-\nabla{G}(\textbf{X})$$ para alguna función $G: \mathbb{R}^{n} \rightarrow \mathbb{R}$, que por comodidad, la tomaremos de clase $C^{\infty}$. En términos de sistemas de dos ecuaciones, que son las hemos estado estudiando, tenemos que un sistema es gradiente si $$ \begin{array}{rcl} \dot{x} & = & -\frac{\partial{G}}{\partial{x}} \\ \dot{y} & = & – \frac{\partial{G}}{\partial{y}} \end{array}$$ para alguna función $G: \mathbb{R}^{2} \rightarrow \mathbb{R}$. Estudiaremos sus principales propiedades y como ya mencionamos veremos cuándo este tipo de sistemas admite una función de Lyapunov.
Sistemas gradiente
En el primer video definimos a los sistemas gradientes y estudiamos sus principales propiedades. Además, encontramos una función de Lyapunov para puntos de equilibrio que son mínimos locales estrictos para la función $G$ que define al sistema gradiente.
En el segundo video estudiamos un par de sistemas gradientes, así como su plano fase.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Sea $\dot{\textbf{X}}=-\nabla{G(\textbf{X})}$ un sistema gradiente. Prueba que $\dot{G}(\textbf{X})=0 \iff \textbf{X}$ es un punto de equilibrio del sistema.
Considera el sistema gradiente $\dot{\textbf{X}}=-\nabla{G(\textbf{X})}$. Demuestra que si $(x_{0},y_{0})$ es un mínimo local estricto para $G$, entonces es asintóticamente estable.
Demuestra que el sistema de dos ecuaciones, obtenido por la linealización de un sistema gradiente en un punto de equilibrio, tiene únicamente valores propios reales.
Considera el sistema de ecuaciones $$\begin{array}{rcl} \dot{x} & = & y^{2}+2xy \\ \dot{y} & = & x^{2}+2xy \end{array}$$ que estudiamos en el primer ejemplo del segundo video. Linealiza el sistema en el origen y encuentra su estabilidad.
Supongamos que un sistema hamiltoniano es gradiente. Prueba que entonces la función hamiltoniana $H$ es armónica, es decir, se satisface $$\frac{\partial^{2}{H}}{\partial{x}^{2}}+\frac{\partial^{2}{H}}{\partial{y}^{2}}=0.$$ ¿El recíproco es cierto?
Da un ejemplo de un sistema que sea hamiltoniano y gradiente a la vez.
Verifica que el sistema $$\begin{array}{rcl} \dot{x} & = & x^{2}-2xy \\ \dot{y} & = & y^{2}-x^{2} \end{array}$$ es gradiente. Esboza su plano fase.
Considera la función $G(x,y)=x^{4}+2y^{4}$. Define un sistema gradiente con dicha función, encuentra sus puntos de equilibrio, encuentra una función de Lyapunov para el sistema (si existe) y determina la estabilidad de los puntos de equilibrio.
Más adelante
En la siguiente entrada estudiaremos un poco de bifurcaciones en sistemas de dos ecuaciones de primer orden. Es decir, estudiaremos familias de sistemas de primer orden que varían respecto a un parámetro $\lambda \in \mathbb{R}$. Estudiaremos primero familias de sistemas lineales, y posteriormente analizaremos un par de sistemas no lineales, cuyas bifurcaciones son comunes en dicha área de las ecuaciones diferenciales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En la entrada anterior definimos a los sistemas hamiltonianos, que son aquellos que tienen la forma $$\begin{array}{rcl} \dot{x} & = & \frac{\partial{H}}{\partial{y}} \\ \dot{y} & = & -\frac{\partial{H}}{\partial{x}} \end{array}$$ para cierta función $H:\mathbb{R}^{2} \rightarrow \mathbb{R}$ que llamamos función hamiltoniana. Vimos sus principales propiedades, una de las cuales nos dice que las curvas de nivel de $H$ coinciden con las curvas solución del sistema de ecuaciones. Así, estudiar el plano fase y la estabilidad de los puntos de equilibrio para este tipo de sistemas es bastante sencillo. Lamentablemente no todos los sistemas son hamiltonianos, y por lo tanto no es posible encontrar una función $H$ que sea una cantidad conservada para el sistema.
Comenzaremos estudiando el sistema de ecuaciones que modela el movimiento pendular con fricción. A diferencia del péndulo simple que no tiene fricción, este nuevo sistema no es hamiltoniano. Sin embargo, con ayuda de la función hamiltoniana que define al sistema del péndulo simple, podremos hacer un buen esbozo del plano fase. Esto ocurrirá ya que la derivada de $H$ respecto al tiempo satisface $$\dot{H}(x(t),y(t))\leq 0$$ para cualquier solución $(x(t),y(t))$ del sistema. Esto significa que las curvas solución al sistema recorren las curvas de nivel de $H$ de valores mayores a menores.
Con el análisis realizado para el sistema del péndulo con fricción, lo siguiente que haremos será estudiar un tipo de funciones que comparten las propiedades que satisface la función $H$ antes mencionada, y que llamaremos funciones de Lyapunov. Definiremos formalmente a dichas funciones y veremos sus principales propiedades, entre ellas el teorema de estabilidad de Lyapunov que nos dice que si existe una función de Lyapunov $L:U \rightarrow \mathbb{R}$ definida en una vecindad $U$ de un punto de equilibrio para un sistema de ecuaciones, entonces el punto de equilibrio es estable. Si además $\dot{L}<0$ en $U$, excepto en el punto de equilibrio, entonces este será asintóticamente estable.
¡Vamos a comenzar!
El péndulo con fricción
Comenzamos estudiando el sistema que modela el movimiento de un péndulo con fricción. Revisamos las diferencias y similitudes que mantiene con el sistema para el péndulo simple y esbozamos su plano fase con ayuda de la función hamiltoniana que define al sistema del péndulo simple.
Funciones de Lyapunov
En el video definimos a las funciones de Lyapunov, revisamos algunas propiedades interesantes y demostramos el Teorema de estabilidad de Lyapunov. Mediante un par de ejemplos observamos cuándo aplicar este último teorema.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Esboza el plano fase del sistema $$\begin{array}{rcl} \dot{x} & = & -xy^{4} \\ \dot{y} & = & x^{4}y. \end{array}$$ Verifica que el sistema no es hamiltoniano. Por lo tanto, existen sistemas no hamiltonianos para los cuales existen funciones que son cantidades conservadas. (Por lo dicho en el video, $L(x,y)=x^{4}+y^{4}$ es una cantidad conservada para el sistema).
Considera el sistema $$\begin{array}{rcl} \dot{x} & = & y-2x \\ \dot{y} & = & 2x-y-x^{3}. \end{array}$$ Prueba que el origen es un punto de equilibrio. Demuestra que la función $L(x,y)=(x+y)^{2}+\frac{1}{2}x^{4}$ es una función de Lyapunov para el origen. Determina la estabilidad del punto de equilibrio.
Considera el sistema $$\begin{array}{rcl} \dot{x} & = & y \\ \dot{y} & = & -\sin{x}-y. \end{array}$$ Prueba que los puntos de equilibrio de la forma $(m\pi,0)$ con $m$ par son asintóticamente estables, usando el último teorema del segundo video.
Prueba que el origen es el único punto de equilbirio para el sistema $$\begin{array}{rcl} \dot{x} & = & -xy \\ \dot{y} & = & x^{2}-y. \end{array}$$ Considera la función $L:U \rightarrow \mathbb{R}$ definida como $L(x,y)=x^{2}+y^{2}$ donde $U$ es un abierto que contiene a $(0,0)$. Prueba que $L$ es una función de Lyapunov para el punto de equilibrio. ¿Es $(0,0)$ asintóticamente estable?
Considera el sistema $$\begin{array}{rcl} \dot{x} & = & -2x \\ \dot{y} & = & x-y. \end{array}$$ y la función $L(x,y)=c_{1}x^{2}+c_{2}y^{2}$, $c_{1}, c_{2}$ constantes. Encuentra valores para las constantes de tal forma que $L$ sea una función de Lyapunov para el sistema.
Más adelante
En la próxima entrada definiremos un tipo particular de sistemas, los llamados sistemas gradiente. Al igual que los sistemas hamiltonianos, veremos sus principales propiedades. Además, probaremos la existencia de funciones de Lyapunov para algunos puntos de equilibrio en particular de dichos sistemas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Las matemáticas son la creación más poderosa y bella del espíritu humano. – Stefan Banach
Introducción
Con esta entrada culminaremos el estudio de los sistemas lineales. En la unidad 3 hicimos un estudio analítico y en esta unidad un estudio cualitativo, aunque reducido a un sistema compuesto por dos ecuaciones, esto con el fin de hacer al mismo tiempo un estudio geométrico en el plano.
A continuación presentamos un breve resumen de los visto en las entradas anteriores.
Clasificación de los planos fase y los puntos de equilibrio
El sistema que estudiamos todo este tiempo fue
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{1} \tag{1} \end{align*}
Este sistema lo podemos escribir en forma matricial como
$$\begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \label{2} \tag{2}$$
Si
$$\mathbf{Y}^{\prime} = \begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix}, \hspace{1cm} \mathbf{Y} = \begin{pmatrix} x \\ y \end{pmatrix} \hspace{1cm} y \hspace{1cm} \mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$$
Vimos que la naturaleza y estabilidad del punto de equilibrio quedó caracterizada por los valores propios de la matriz $\mathbf{A}$ del sistema.
El único punto de equilibrio de los sistemas lineales es el origen $Y_{0} = (0, 0)$, siempre que el determinante de $\mathbf{A}$ sea distinto de cero. En la entrada anterior teníamos que $|\mathbf{A}| = 0$, es por ello que obtuvimos infinitos puntos de equilibrio y es que el hecho de que tengamos valores propios nulos es un caso especial y poco común.
En el caso en el que no hay valores propios nulos, sabemos que en función del comportamiento de las trayectorias en relación con el punto de equilibrio aislado $Y_{0} = (0, 0)$, este punto se denominará: nodo, punto silla, centro, foco, atractor o repulsor. Recordemos cuando se da cada caso.
El punto de equilibrio es un nodo.
Este caso ocurre cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y del mismo signo.
Si $\lambda_{1} < \lambda_{2} < 0$, entonces todas las trayectorias se acercan al origen, de manera que el punto de equilibrio es un nodo atractor y será asintóticamente estable.
Nodo atractor.
Si $\lambda_{1} > \lambda_{2} > 0$, entonces todas las trayectorias se alejan del origen, por tanto, el punto de equilibrio es un nodo repulsor y será inestable.
Nodo repulsor.
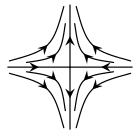
El punto crítico es un punto silla.
Este caso se presenta cuando los valores propios $\lambda_{1}$ y $\lambda_{2}$ son reales y de distinto signo.
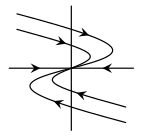
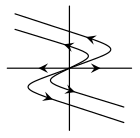
Si $\lambda_{1} < 0$ y $\lambda_{2} > 0$ ocurre que dos trayectorias rectas se acercan al origen y otras dos trayectorias rectas se separan de él, mientras que el resto de trayectorias al pasar cerca del origen inmediatamente se alejan de él. Esto nos permite concluir que todo punto silla es inestable.
Punto silla.
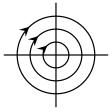
El punto crítico es un centro.
Este caso se presenta cuando los valores propios son imaginarios puros.
Si $\lambda_{1} = i \beta$ y $\lambda_{2} = -i \beta$, entonces las trayectorias serán curvas cerradas que rodean al origen, en general tienen forma de elipses, de modo que ninguna trayectoria tiende a él cuando $t \rightarrow + \infty $ o $t \rightarrow -\infty $, esto hace que el punto de equilibrio sea estable, pero no asintóticamente estable.
Centro.
El punto crítico es un foco.
En este caso los valores propios son complejos conjugados y tienen parte real no nula.
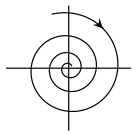
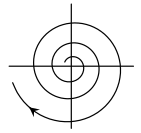
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se acercan al origen, es por ello que el punto de equilibrio es asintóticamente estable.
Foco estable.
Si $\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$, entonces las trayectorias son curvas en forma de espiral que, conforme $t \rightarrow + \infty$ todas se separan del origen, es por ello que el punto de equilibrio es inestable.
Foco inestable.
El punto crítico es un atractor o un repulsor.
Este caso se presenta cuando un sistema lineal tiene valores propios reales, del mismo signo, pero además iguales.
Si $\lambda_{1} = \lambda_{2} < 0$, entonces las trayectorias tienden hacia el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un atractor y es asintóticamente estable.
Atractor.
Si $\lambda_{1} = \lambda_{2} > 0$, entonces las trayectorias se alejan el origen en forma de rayos o curvas dependiendo de si es posible determinar dos vectores propios o uno propio y otro generalizado. En este caso el punto de equilibrio es un repulsor y es inestable.
Repulsor.
Los puntos críticos son una recta.
En este caso particular hay infinitos puntos de equilibrio, todos sobre una recta y ocurre cuando uno o ambos valores propios son cero.
Líneas de puntos fijos inestables.
Líneas de puntos fijos estables.
Como podemos ver, las características de las trayectorias y de los puntos de equilibrio en el plano fase quedan determinadas por los valores propios de la matriz de coeficientes $\mathbf{A}$. Sin embargo, estas características también se pueden describir en términos de la traza $T$ y del determinante $D$ de la matriz de coeficientes $A$, veamos como es esto.
La traza y el determinante de la matriz de coeficientes
Consideremos la matriz de coeficientes
$$\mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix} \label{4} \tag{4}$$
Sabemos que la traza de una matriz se define como la suma de los elementos de la diagonal principal de dicha matriz. En nuestro caso, la traza de $\mathbf{A}$ es
$$T = Tr(\mathbf{A}) = a + d \label{5} \tag{5}$$
Por otro lado, el determinante de la matriz $\mathbf{A}$ es
$$D = |\mathbf{A}| = ad -bc \label{6} \tag{6}$$
Consideremos la ecuación característica de $\mathbf{A}$.
$$|\mathbf{A} -\lambda \mathbf{I}| = \begin{vmatrix} a -\lambda & b \\ c & d -\lambda \end{vmatrix} = 0 \label{7} \tag{7}$$
El polinomio característico es
$$P(\lambda) = (a -\lambda)(d -\lambda) -bc = \lambda^{2} -(a + d) \lambda + (ad -bc) \label{8} \tag{8}$$
Si sustituimos las ecuaciones (\ref{5}) y (\ref{6}) en la ecuación característica se tiene
$$\lambda^{2} -T \lambda + D = 0 \label{9} \tag{9}$$
Hemos logrado escribir a los valores propios de $\mathbf{A}$ en términos de la traza y del determinante de la misma matriz $\mathbf{A}$.
De tarea moral, usando (\ref{10}) calcula explícitamente las operaciones $(\lambda_{1} + \lambda_{2})$ y $(\lambda_{1} \cdot \lambda_{2})$ y verifica que se satisfacen las siguientes relaciones importantes.
Es decir, la traza y el determinante de $\mathbf{A}$ también se pueden escribir en términos de los valores propios de $\mathbf{A}$.
El análisis cualitativo que hemos hecho a lo largo de las últimas entradas ha sido en función de los valores propios, recordemos que las posibilidades son
Valores propios reales y distintos:
$\lambda_{1} < \lambda_{2} < 0$.
$\lambda_{1} > \lambda_{2} > 0$.
$\lambda_{1} < 0$ y $\lambda_{2} > 0$.
Valores propios complejos:
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha < 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha = 0$.
$\lambda_{1} = \alpha + i \beta$ y $\lambda_{2} = \alpha -i \beta$ con $\alpha > 0$.
Valores propios repetidos:
$\lambda_{1} = \lambda_{2} < 0$.
$\lambda_{1} = \lambda_{2} > 0$.
Valores propios nulos
$\lambda_{1} = 0$ y $\lambda_{2} < 0$.
$\lambda_{1} = 0$ y $\lambda_{2} > 0$.
$\lambda_{1} = \lambda_{2} = 0$.
Sin embargo, ahora podemos analizar cada caso pero en función de los valores de la traza $T$ y el determinante $D$ de $\mathbf{A}$, ya que inmediatamente podemos notar de (\ref{10}) que los valores propios de $\mathbf{A}$ son complejos si $T^{2} -4D < 0$, son repetidos si $T^{2} -4D = 0$, y son reales y distintos si $T^{2} -4D > 0$.
El plano Traza – Determinante
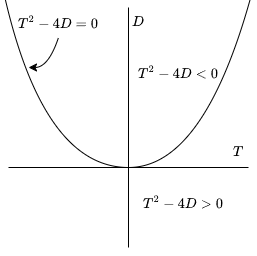
Comenzaremos a hacer un nuevo bosquejo para los sistemas lineales examinando el conocido plano traza – determinante. El eje $T$ corresponderá a la línea horizontal y representa a la traza, mientras que el eje $D$ corresponderá a la vertical y representa al determinante. En este plano la curva
$$T^{2} -4D = 0$$
o su equivalente,
$$D(T) = \dfrac{T^{2}}{4} \label{13} \tag{13}$$
es una parábola con concavidad hacia arriba. Arriba de ésta encontramos $T^{2} -4D < 0$, y abajo de ella $T^{2} -4D > 0$, tal como se muestra en la siguiente figura.
Plano traza – determinante.
Para usar este plano, calculamos primero $T$ y $D$ para una matriz $\mathbf{A}$ dada y luego localizamos el punto $(T, D)$ en el plano. De forma inmediata podremos visualizar si los valores propios son reales, repetidos o complejos, dependiendo de la posición de $(T, D)$ respecto a la parábola.
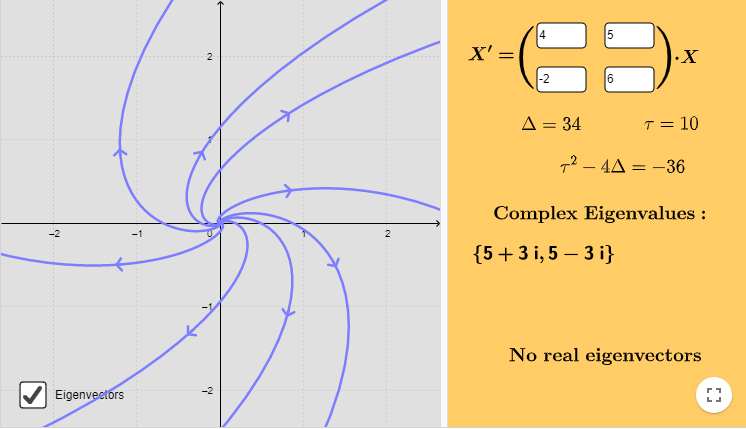
Ejemplo: Determinar el tipo de valores propios que tiene el siguiente sistema lineal.
Como $T^{2} -4D < 0$, entonces inmediatamente concluimos que los valores propios son complejos conjugados. Ahora bien, aún no sabemos si se trata de un centro o algún tipo de espiral, pero por el momento no nos preocupemos por ello.
Sólo con el fin de conocer el tipo de soluciones que tiene el sistema, su plano fase es el siguiente.
Plano fase del sistema.
Las trayectorias del sistema corresponden a espirales y el punto de equilibrio es un foco inestable. Observa que la figura ya nos da los valores de la traza, el determinante y el discriminante, aunque con una notación distinta.
Ahora puedes regresar a visualizar los planos fase de todos los ejemplos que hicimos en las 4 entradas anteriores y poner más atención en los valores de la traza y el determinante.
$\square$
Por su puesto que podemos hacer mucho más en el plano traza – determinante. Por ejemplo, desearíamos no sólo saber si los valores propios de $\mathbf{A}$ son complejos, repetidos o reales, sino que también conocer si tienen parte real nula o distinta de cero o si son reales positivos, negativos o de distinto signo, etcétera.
A continuación haremos un análisis más detallado sobre las raíces (\ref{10}) y veremos que tipo de información nos proporciona sobre los sistemas lineales.
Recordemos que los valores propios de $\mathbf{A}$, en términos de la traza y el determinante de $\mathbf{A}$ son
Atendiendo a los diferentes valores de $T$ y $D$, se tiene:
Si $T^{2} -4D < 0$, entonces los valores propios $\lambda_{1}$ y $\lambda_{2}$ son complejos conjugados con parte real igual a $T /2$. Se tienen los siguientes casos:
Los valores propios son imaginarios puros si $T = 0$ (centro y estabilidad).
Los valores propios tienen parte real negativa cuando $T < 0$ (foco y estabilidad asintótica).
Los valores propios tienen parte real positiva cuando $T > 0$ (foco e inestabilidad).
Si consideramos el plano traza – determinante y denotamos por $O$ al origen podremos asegurar que por encima de la parábola $T^{2} -4D = 0$ se tiene:
En el eje $OD$ se presentan los centros y hay estabilidad.
A la izquierda del eje $OD$ se presentan los focos y hay estabilidad asintótica.
A la derecha del eje $OD$ también se presentan focos, pero hay inestabilidad.
Si $D < 0$, entonces se tiene $T^{2} -4D > T^{2}$. En este caso los valores propios son reales y de distinto signo, lo que significa que se presentarán puntos silla e inestabilidad. En el plano traza – determinante los encontraremos por debajo del eje $T$.
Si $D > 0$ y $T^{2} -4D \geq 0$, entonces los valores propios son reales y tienen el mismo signo que $T$. Los casos posibles son:
Si $T < 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y negativos (atractor y estabilidad asintótica).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y negativos (nodo atractor y estabilidad asintótica).
Si $T > 0$, se tiene:
Cuando $T^{2} -4D = 0$, los valores propios son iguales y positivos (repulsor e inestabilidad).
Cuando $T^{2} -4D > 0$, los valores propios son reales, distintos y positivos (nodo repulsor e inestabilidad).
Si $D = 0$, entonces uno o ambos valores propios son cero. Los siguientes casos se obtienen directamente de (\ref{11}) y (\ref{12}).
Si $T = 0$ (origen), entonces ambos valores propios son cero (recta de puntos de equilibrio y trayectorias paralelas a dicha recta).
Si $T > 0$, entonces un valor propio es cero y el otro es positivo (recta de puntos de equilibrio inestables y trayectorias rectas que se alejan de la recta de puntos de equilibrio).
Si $T < 0$, entonces un valor propio es cero y el otro es negativo (recta de puntos de equilibrio asintóticamente estables y trayectorias rectas que tienden a la recta de puntos de equilibrio).
¡Todo lo que hemos aprendido sobre sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales de primer orden con coeficientes constantes, incluyendo todas las características anteriores, se resume en el siguiente diagrama!.
Plano traza – determinante con todas las posibilidades de planos fase.
Veamos un ejemplo.
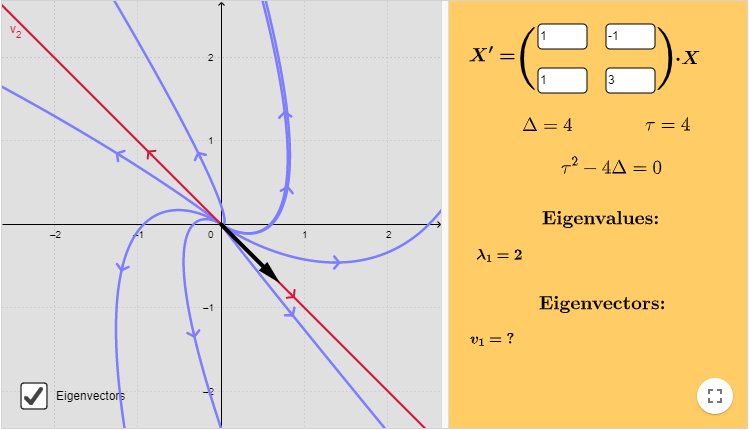
Ejemplo: Caracterizar el siguiente sistema lineal.
Como $T > 0$, $D > 0$ y $T^{2} -4D = 0$, vamos al punto 3 y deducimos que el sistema lineal tiene valores propios iguales y positivos. De acuerdo a las ecuaciones (\ref{11}) y (\ref{12}) se tiene el siguiente sistema.
\begin{align*} T &= 2 = \lambda_{1} + \lambda_{2} \\ D &= 1 = \lambda_{1}\lambda_{2} \end{align*}
De la primer ecuación obtenemos $\lambda_{1} = 2 -\lambda_{2}$, sustituyendo en la segunda ecuación se tiene
La única raíz es $\lambda_{2} = 1$, sustituyendo en cualquier ecuación del sistema obtenemos que $\lambda_{1} = 1$. Por lo tanto, el único valor propio de la matriz $\mathbf{A}$ es $\lambda = 1$ (iguales y positivos, tal como lo habíamos deducido).
Si vamos al plano traza – determinante, como $T > 0$ y $D > 0$, entonces estamos en el primer cuadrante, pero además $T^{2} -4D = 0$, así que estamos situados sobre la parábola del primer cuadrante, exactamente en el punto $(T, D) = (2, 1)$, esto nos permite concluir que el plano fase del sistema corresponde a repulsor.
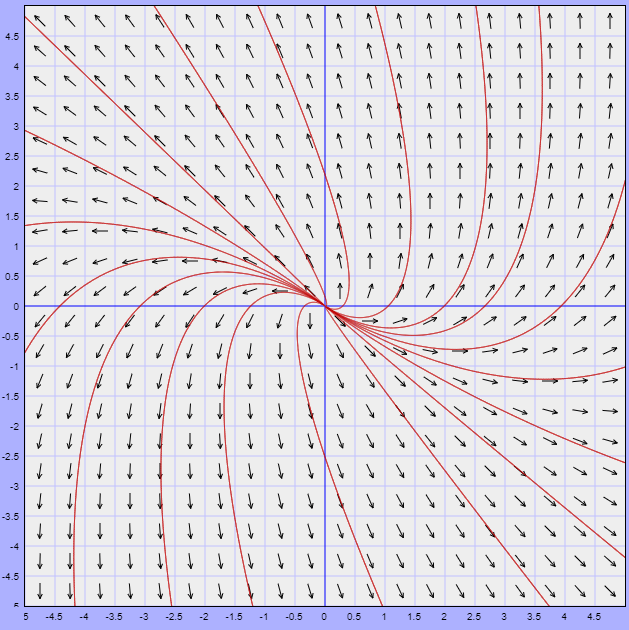
El plano fase del sistema es el siguiente.
Plano fase del sistema.
Efectivamente se trata de un repulsor.
$\square$
Debido a que cada punto del plano traza – determinante representa un plano fase distinto, el plano traza – determinante es un ejemplo de lo que se conoce como plano paramétrico.
El plano paramétrico
El plano traza – determinante es un ejemplo de un plano paramétrico. Los elementos de la matriz $\mathbf{A}$ son parámetros que se pueden ajustar, cuando esos elementos cambian, la traza y el determinante de la matriz también se modifican y el punto $(T, D)$ se mueve en el plano paramétrico. Cuando este punto entra en las diversas regiones del plano traza – determinante, debemos imaginar que los retratos fase asociados también experimentan transformaciones.
El plano traza – determinante es un esquema de clasificación del comportamiento de todas las posibles soluciones de sistemas lineales.
En este enlace se tiene acceso a una herramienta visual del plano paramétrico. En él se puede mover el punto $(T, D)$ a lo largo de las diferentes regiones del plano traza – determinante a la vez que visualizamos el tipo de planos fase que se generan. ¡Pruébalo y diviértete!
Con esto concluimos el estudio de los sistemas lineales. Cabe mencionar que el plano traza – determinante no da una información completa sobre el sistema lineal tratado.
Por ejemplo, a lo largo de la parábola $T^{2} -4D = 0$ tenemos valores propios repetidos, pero no podemos determinar si tenemos uno o varios vectores propios linealmente independientes. para saberlo es preciso calcularlos.
De modo similar, no podemos determinar la dirección en que las soluciones se mueven alrededor del origen si $T^{2}-4D < 0$. Por ejemplo, las dos matrices
tienen traza $T = 0$ y determinante $D = 1$, pero las soluciones del sistema $\mathbf{Y}^{\prime} = \mathbf{AY}$ se mueven alrededor del origen en el sentido de las manecillas del reloj, mientras que las soluciones de $\mathbf{Y}^{\prime} = \mathbf{BY}$ viajan en el sentido opuesto.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Hacer un análisis cualitativo de los siguientes sistemas lineales apoyándose de la traza y el determinante de la matriz de coeficientes $\mathbf{A}$, así como del plano traza – determinante. Es decir, de acuerdo al valor de la traza $T$, el determinante $D$ y el discriminante $T^{2} -4D$, determinar que tipo de valores propios tiene el sistema, así como el tipo de plano fase y estabilidad del punto de equilibrio.
Estamos cerca de concluir el curso. En las próximas entradas estudiaremos de manera cualitativa a los sistemas no lineales compuestos por dos ecuaciones diferenciales de primer orden.
En particular, en la siguiente entrada veremos que alrededor de un punto de equilibrio de un sistema no lineal las trayectorias son muy parecidas a las de un sistema lineal lo que nos permitirá observar el comportamiento que tienen las soluciones del sistema no lineal, al menos cerca de un punto de equilibrio.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Un matemático es un hombre ciego en un cuarto oscuro tratandode buscar a un gato negro que no está allí. – Charles Darwin
Introducción
En esta entrada concluiremos con el estudio cualitativo de los sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales.
Hasta ahora somos capaces de clasificar y esbozar el comportamiento de las soluciones para los casos en los que los valores propios son reales, complejos y repetidos. Es momento de estudiar el último caso en donde uno o ambos de los valores propios son cero. Este caso es importante ya que divide los sistemas lineales con valores propios estrictamente positivos (repulsores) y valores propios estrictamente negativos (atractores) de aquellos que poseen un valor propio positivo y uno negativo (puntos silla).
Los casos posibles son
$\lambda_{1} = 0$ y $\lambda_{2} < 0$.
$\lambda_{1} = 0$ y $\lambda_{2} > 0$.
$\lambda_{1} = \lambda_{2} = 0$.
Recordemos que el sistema que estamos estudiando es de la forma
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{1} \tag{1} \end{align*}
$$\mathbf{Y}^{\prime} = \begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix}, \hspace{1cm} \mathbf{Y} = \begin{pmatrix} x \\ y \end{pmatrix} \hspace{1cm} y \hspace{1cm} \mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$$
Sean $\lambda_{1}$ y $\lambda_{2}$ los valores propios de $\mathbf{A}$ y sean $\mathbf{K}_{1}$ y $\mathbf{K}_{2}$ los vectores propios de $\mathbf{A}$ asociados a cada valor propio, respectivamente.
Comencemos por revisar el caso en el que un valor propio es nulo y el otro negativo.
Un valor propio nulo y otro negativo
Caso 1: $\lambda_{1} = 0$ y $\lambda_{2} < 0$.
Supongamos que $\lambda_{1} = 0$ y $\lambda_{2} < 0$ son los valores propios de $\mathbf{A}$. Debido a que $\lambda_{1} = 0$ y $\lambda_{2} \neq 0$, es decir, los valores propios son reales y distintos, entonces la solución general de (\ref{1}) debe ser de la forma
Observemos que esta solución depende de $t$ sólo a través del segundo término, de manera que si $c_{2} = 0$, entonces la solución será el vector constante
En este caso, todos los puntos $c_{1} \mathbf{K}_{1}$, para cualquier $c_{1}$, son puntos de equilibrio y todo aquel que esté situado en la línea de vectores propios para el valor propio $\lambda_{1} = 0$ es un punto de equilibrio.
Si $\lambda_{2} < 0$, entonces el segundo término en la solución general (\ref{4}) tiende a cero cuando $t$ crece, por lo que dicha solución tiende al punto de equilibrio $c_{1} \mathbf{K}_{1}$ a lo largo de una línea paralela a $\mathbf{K}_{2}$.
El plano fase indicando estas características es el siguiente.
Plano fase para un valor propio nulo y otro negativo.
Veamos que ocurre si $\lambda_{2} > 0$.
Un valor propio nulo y otro positivo
Caso 2: $\lambda_{1} = 0$ y $\lambda_{2} > 0$.
La solución general del sistema (\ref{1}) sigue siendo
Pero en este caso $\lambda_{2} > 0$, lo que implica que la solución se aleja de la línea de puntos de equilibrio cuando $t$ crece.
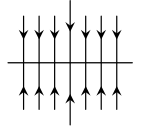
El plano fase es el siguiente.
Plano fase para un valor propio nulo y otro positivo.
Finalmente veamos que ocurre si $\lambda_{1} = \lambda_{2} = 0$.
Ambos valores propios nulos
Caso 3: $\lambda_{1} = \lambda_{2} = 0$.
En este caso ambos valores propios son repetidos, lo que significa que podemos aplicar la teoría vista en la entrada anterior. Sea $\mathbf{K}_{1}$ el único vector propio de la matriz $\mathbf{A}$ y sea $\mathbf{K}_{2}$ un vector propio generalizado de $\mathbf{A}$. Sabemos que la solución general del sistema (\ref{1}) en el caso de valores propios repetidos es
Las consecuencias de esto es que terminaremos con una solución en la que sólo una función $x(t)$ o $y(t)$ dependerá de $t$, mientras que la otra será una constante.
Supongamos que sólo $x$ depende de $t$, es decir, $x = x(t)$ y $y(t) = c$, con $c$ una constante, entonces para todo $t$ la función $y(t)$ tendrá el mismo valor, mientras que $x(t)$ dependerá de $t$ linealmente, esto en el plano fase se traduce en rectas paralelas al eje $X$ (ya que $y$ no cambia). La dirección de las trayectorias dependerá del signo de la constante que acompaña a la función $y(x)$.
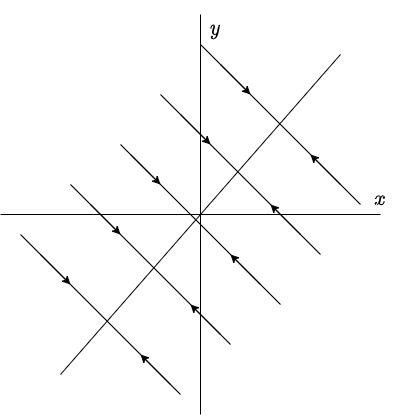
El plano fase para el caso en el $x$ depende de $t$ es
Plano fase para ambos valores propios nulos.
Si se presenta el caso en el que $x(t)$ es una constante y $y(t)$ depende de $t$, entonces las trayectorias serán rectas verticales paralelas al eje $Y$.
En este caso los puntos de equilibrio del sistema serán el eje $X$ o el eje $Y$ dependiendo de que función sea la que dependa de $t$.
Concluyamos esta entrada con un ejemplo por cada caso visto.
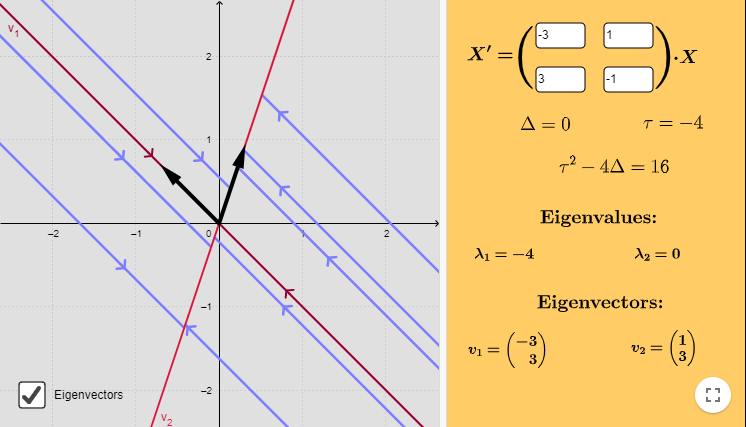
Caso 1: $\lambda_{1} = 0$ y $\lambda_{2} < 0$.
Ejemplo: Resolver el siguiente sistema lineal y hacer un análisis cualitativo de las soluciones.
De acuerdo a la teoría vista, los puntos de equilibrio corresponden a la recta situada a lo largo del vector propio $\mathbf{K}_{1}$. Para encontrar esta recta consideremos que $c_{2} = 0$, de manera que la solución es
por lo que todas las trayectorias tienden a los puntos de equilibrio $c_{1}\mathbf{K}_{1}$ por cada valor de $c_{1}$ y lo hacen de forma paralela al vector propio $\mathbf{K}_{2}$.
El plano fase indicando las características anteriores es el siguiente.
Plano fase del sistema.
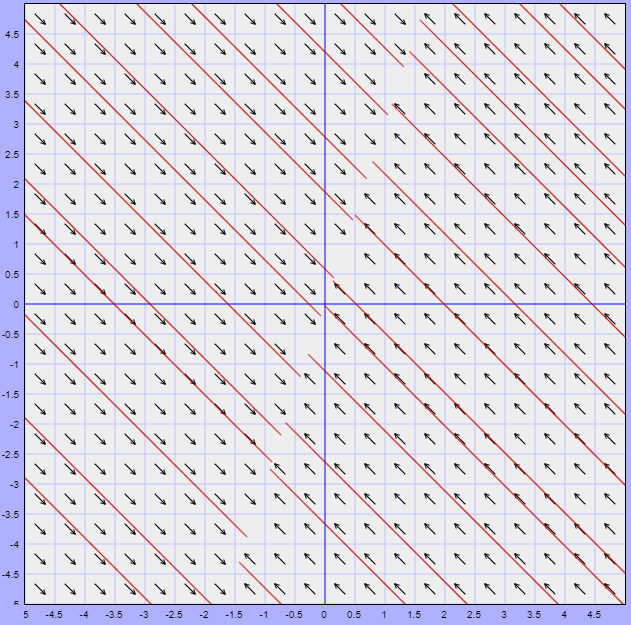
Ya vimos que la función vectorial es
$$F(x, y) = (-3x + y, 3x -y)$$
El campo vectorial definido por esta función, y algunas trayectorias correspondientes a soluciones del sistema, se muestran en la siguiente figura.
Trayectorias y campo vectorial.
$\square$
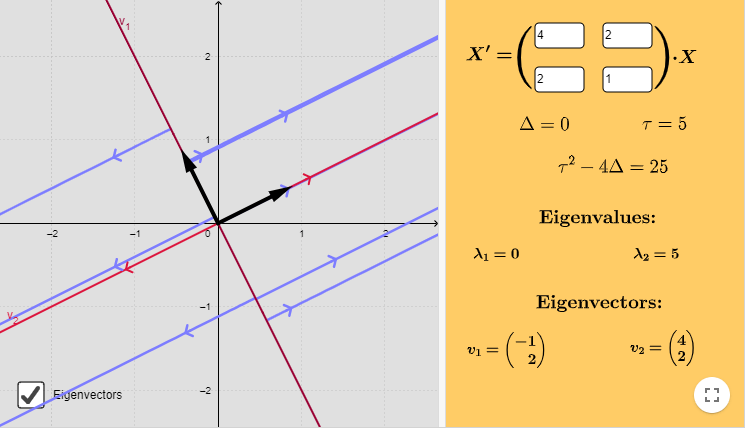
Caso 2: $\lambda_{1} = 0$ y $\lambda_{2} > 0$.
Ejemplo: Resolver el siguiente sistema lineal y hacer un análisis cualitativo de las soluciones.
La recta que contiene a los puntos de equilibrio es aquella línea definida por el vector propio $\mathbf{K}_{1}$, es decir, si en la solución general hacemos $c_{2} = 0$, entonces obtenemos la solución
Y $x(t)$ y $y(t)$ divergen si $t \rightarrow \infty$, esto nos indica que las trayectorias se alejan de los puntos de equilibrio $c_{1} \mathbf{K}_{1}$ por cada valor de $c_{1}$ y lo hacen de forma paralela al vector propio $\mathbf{K}_{2}$.
El plano fase del sistema es el siguiente.
Plano fase del sistema.
La función vectorial que define al campo vectorial asociado es
$$F(x, y) = (4x + 2y, 2x + y)$$
El campo vectorial y algunas trayectorias se muestran en la siguiente figura.
Trayectorias y campo vectorial.
$\square$
Concluyamos con el caso especial en el que ambos valores propios son cero.
Caso 3: $\lambda_{1} = \lambda_{2} = 0$.
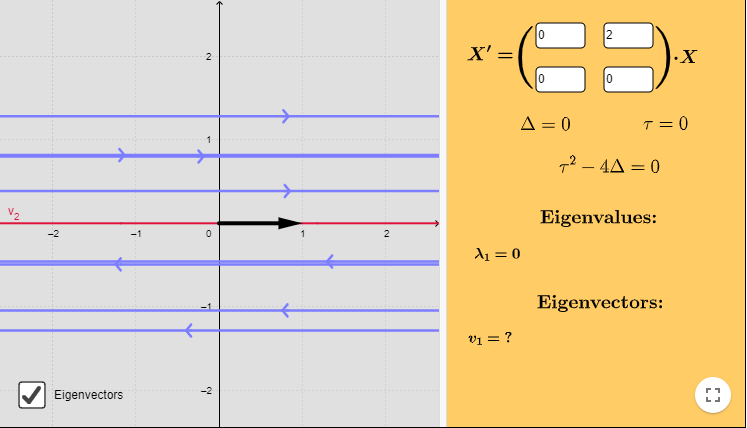
Ejemplo: Resolver el siguiente sistema lineal y hacer un análisis cualitativo de las soluciones.
Vemos que sólo la función $x(t)$ depende de $t$, mientras que $y(t)$ es una constante.
Esto lo hacemos debido a que el sistema es bastante sencillo. Sin embargo, a continuación haremos el desarrollo hecho en la entrada anterior ya que, como veremos, los valores propios serán repetidos y nulos. Dichos valores propios los obtenemos de la siguiente ecuación característica.
Este sistema nos indica que $2k_{2} = 0$, es decir, $k_{2} = 0$ y que $k_{1}$ puede tomar cualquier valor en $\mathbb{R}$. Tomemos $k_{1} = 1$, tal que el primer vector propio sea
Esta solución es la misma que encontramos antes. Debido a que $x(t)$ depende de $t$ linealmente, entonces por cada valor de $y(t)$, es decir de $c_{2}$, $x(t)$ tomará todos los valores en $\mathbb{R}$. Esto significa que en el plano fase las trayectorias serán rectas paralelas al eje $X$.
Verifica que los puntos de equilibrio del sistema corresponden al eje $X$ del plano fase.
Notemos que si $y(x) > 0$, o bien, $c_{2} > 0$, entonces
$$\lim_{t \to \infty} x(t) = \infty$$
y si $y(x) < 0$, o bien, $c_{2} < 0$, entonces
$$\lim_{t \to \infty} x(t) = -\infty$$
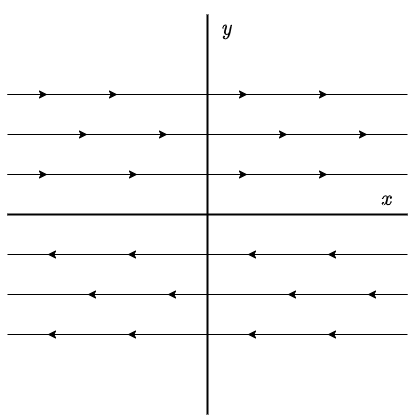
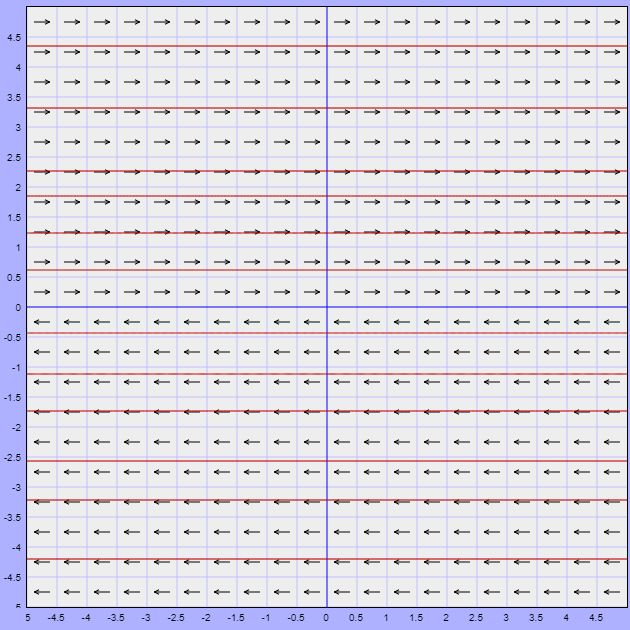
De manera que para $y > 0$ las trayectorias se moverán hacía la derecha y lo harán en sentido opuesto si $y < 0$. El plano fase es el siguiente.
Plano fase del sistema.
La función que define al campo vectorial es
$$F(x, y) = (2y, 0)$$
En la siguiente figura se muestra el campo vectorial asociado y algunas trayectorias.
Trayectorias y campo vectorial.
$\square$
Hemos concluido con el estudio de los sistemas lineales.
Más adelante comenzaremos a estudiar sistemas no lineales, al menos desde una perspectiva cualitativa, y veremos que mucho de los que vimos en los casos lineales nos será de ayuda ya que los planos fase de los sistemas no lineales en la vecindad de un punto de equilibrio son, con frecuencia, muy similares a los planos fase de sistemas lineales, así que veremos esta conexión entre ambos sistemas.
Pero antes de estudiar a los sistemas no lineales dedicaremos la siguiente entrada en hacer un repaso de lo visto en las últimas 4 entradas y resumirlo en lo que se conoce como el plano traza – determinante, ya que seguramente en este punto podría parecernos que hay muchas posibilidades diferentes para los sistemas lineales.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Resolver los siguientes sistemas lineales y hacer un análisis cualitativo de las soluciones.
Hemos concluido con el análisis analítico y cualitativo de los sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales del primer orden. Para tener todo en perspectiva, en la siguiente entrada haremos un breve repaso de todo lo visto con respecto a estos sistemas y resumiremos todo en un plano especial conocido como el plano traza – determinante.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En mi opinión, todas las cosas en la naturaleza ocurren matemáticamente. – Descartes
Introducción
Continuaremos con nuestro estudio cualitativo de los sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales de primer orden con coeficientes constantes.
\begin{align*} x^{\prime} &= ax + by \\ y^{\prime} &= cx + dy \label{1} \tag{1} \end{align*}
$$\mathbf{Y}^{\prime} = \begin{pmatrix} x^{\prime} \\ y^{\prime} \end{pmatrix}, \hspace{1cm} \mathbf{Y} = \begin{pmatrix} x \\ y \end{pmatrix} \hspace{1cm} y \hspace{1cm} \mathbf{A} = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$$
En esta entrada analizaremos el caso en el que los vectores propios de $\mathbf{A}$ son repetidos.
El caso $\lambda_{1} = \lambda_{2} = 0$ lo revisaremos en la siguiente entrada cuando veamos que ocurre si uno o ambos de los valores propios son nulos.
Los casos que estudiaremos son
$\lambda_{1} = \lambda_{2} < 0$
$\lambda_{1} = \lambda_{2} > 0$
Sin embargo se presentan dos situaciones distintas en este caso.
Recordemos que cuando estudiamos este caso en la unidad anterior se presentaba el problema de que podían faltarnos soluciones linealmente independientes que nos permitieran determinar la solución general del sistema. Por ejemplo, si el sistema está compuesto por $n$ ecuaciones diferenciales de primer orden, entonces debemos encontrar $n$ soluciones linealmente independientes para poder formar la solución general, sin embargo, si algunos valores propios resultan ser repetidos, entonces sólo obtendremos $k$ soluciones linealmente independientes, una por cada valor propio distinto, y nos faltarán encontrar $n -k$ soluciones para formar la solución general. Los conceptos de exponencial de una matriz y de vector propio generalizado resultaron útiles para resolver este problema.
En este caso estamos estudiando un sistema con dos ecuaciones diferenciales lo que vuelve al problema anterior relativamente más sencillo, pues habrá ocasiones en los que es posible determinar dos vectores propios de $\mathbf{A}$ linealmente independientes asociados al mismo valor propio $\lambda$, pero en otras ocasiones sólo habrá un vector propio asociado al único valor propio $\lambda$, así que tendremos que encontrar un vector propio generalizado. Por supuesto, cada caso tendrá efectos muy distintos en el plano fase del sistema.
Estudiemos cada situación y hagamos un análisis cualitativo para cada caso.
En donde $\mathbf{K}_{1}$ y $\mathbf{K}_{2}$ son vectores propios de $\mathbf{A}$ linealmente independientes. Como vimos, estos vectores pueden ser arbitrarios, así que podemos elegir los vectores canónicos
Con $C$ una constante. Esta función en el plano $XY$ o plano fase corresponde a infinitas rectas, una por cada posible valor de la constante $C$.
Plano fase de un sistema con vectores propios arbitrarios.
Este caso corresponde a una situación de las dos que pueden ocurrir. Aún nos falta determinar el sentido de las trayectorias en el plano fase, éste será determinado por el signo de los valores propios.
A continuación haremos un análisis más detallado sobre los casos que se pueden presentar.
Sistemas lineales con valores propios negativos repetidos
Caso 1a: $\lambda_{1} = \lambda_{2} = \lambda < 0$ y dos vectores linealmente independientes.
Este caso corresponde al visto anteriormente.
Supongamos que la matriz $\mathbf{A}$ del sistema (\ref{1}) tiene dos vectores propios linealmente independientes $\mathbf{K}_{1}$ y $\mathbf{K}_{2}$ con valor propio $\lambda < 0$. En este caso la solución general del sistema (\ref{1}) se puede expresar como
Observemos que el vector $e^{\lambda t} (c_{1} \mathbf{K}_{1} + c_{2} \mathbf{K}_{2})$ es paralelo al vector $(c_{1} \mathbf{K}_{1} + c_{2} \mathbf{K}_{2})$ para toda $t$. Por lo tanto, la trayectoria de cualquier solución $\mathbf{Y}(t)$ de (\ref{1}) es una semirrecta en el plano fase.
Como $\mathbf{K}_{1}$ y $\mathbf{K}_{2}$ son linealmente independientes, el conjunto de vectores $\left \{ c_{1} \mathbf{K}_{1} + c_{2} \mathbf{K}_{2} \right \}$, para todas las elecciones de $c_{1}$ y $c_{2}$, cubren cualquier dirección en el plano $XY$.
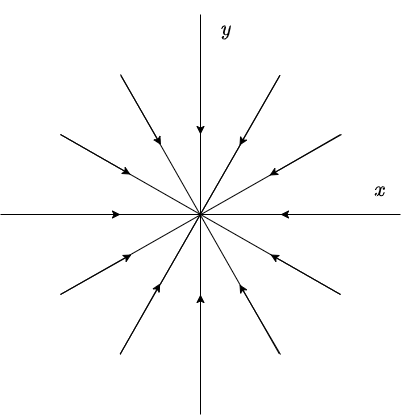
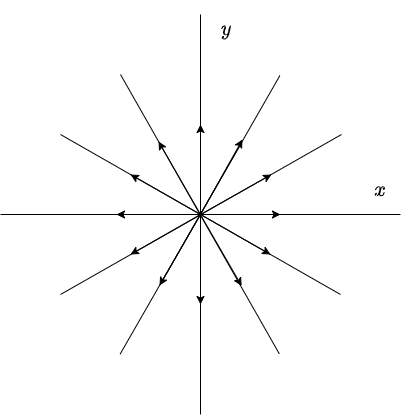
El plano fase con estas características es el siguiente.
Plano fase para valores propios negativos repetidos y dos vectores propios linealmente independientes.
El sentido de las trayectorias es hacia el origen debido a que si $t \rightarrow \infty$, entonces $e^{\lambda t} \rightarrow 0$ ya que $\lambda < 0$.
Se dice que el punto de equilibrio $Y_{0} = (0, 0)$ es un atractor y es asintóticamente estable.
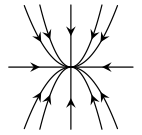
Caso 1b: $\lambda_{1} = \lambda_{2} = \lambda < 0$ y sólo un vector linealmente independiente.
Este caso resulta ser más interesante. Supongamos que $\mathbf{A}$ tiene solamente un vector propio $\mathbf{K}$ linealmente independiente, con valor propio $\lambda$. La solución de (\ref{1}) en este caso es
Para encontrar una segunda solución de (\ref{1}) que sea linealmente independiente de $\mathbf{Y}_{1}$ buscamos un vector $\hat{\mathbf{K}}$, tal que se cumpla simultáneamente
para alguna elección de constantes $c_{1}$ y $c_{2}$.
Esta ecuación puede simplificarse observando que $(\mathbf{A} -\lambda \mathbf{I}) \hat{\mathbf{K}}$ debe ser un múltiplo $k$ de $\mathbf{K}$. Esto se sigue inmediatamente de la ecuación
Observemos que toda solución de (\ref{1}) de la forma (\ref{17}) tiende a $(0, 0)$ cuando $t$ tiende a infinito. Además, notemos que $c_{1} \mathbf{K} + c_{2} \hat{\mathbf{K}}$ es muy pequeño comparado con $c_{2} tk \mathbf{K}$ si $c_{2}$ es diferente de cero y $t$ es muy grande. Por lo tanto, la tangente a la trayectoria de $\mathbf{Y}(t)$ tiende a $\pm \mathbf{K}$, dependiendo del signo de $c_{2}$, cuando $t$ tiende a infinito.
El plano fase con estas características es el siguiente.
Plano fase para valores propios negativos repetidos y sólo un vector propio linealmente independiente.
Nuevamente decimos que el punto de equilibrio $Y_{0} = (0, 0)$ es un atractor y es asintóticamente estable ya que todas las trayectorias tienden a él.
Ambas situaciones también se presentan cuando $\lambda > 0$.
Sistemas lineales con valores propios positivos repetidos
Caso 2a: $\lambda_{1} = \lambda_{2} = \lambda > 0$ y dos vectores linealmente independientes.
Sean $\mathbf{K}_{1}$ y $\mathbf{K}_{2}$ los dos vectores linealmente independientes de la matriz de coeficientes $\mathbf{A}$ asociados al único valor propio $\lambda$. Nuevamente la solución general de (\ref{1}) será
El análisis es exactamente el mismo que en el caso 1a, sin embargo, como $\lambda > 0$, entonces $e^{\lambda t} \rightarrow \infty$ conforme $t \rightarrow \infty$. Por lo tanto, el plano fase para este caso es exactamente el mismo que el del caso 1a con la excepción de que el sentido de las flechas es el opuesto.
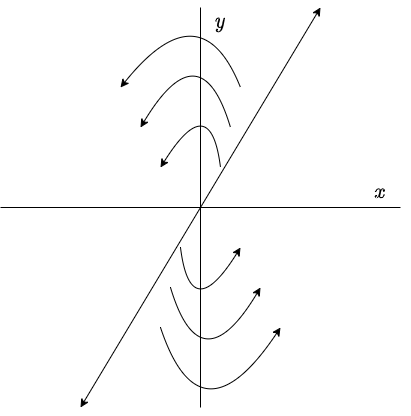
Plano fase para valores propios positivos repetidos y dos vectores propios linealmente independientes.
En este caso se dice que el punto de equilibrio $Y_{0} = (0, 0)$ es un repulsor, por lo tanto inestable.
Concluyamos con el último caso.
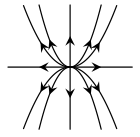
Caso 2b: $\lambda_{1} = \lambda_{2} = \lambda > 0$ y sólo un vector linealmente independiente.
Sea $\mathbf{K}$ el único vector propio de $\mathbf{A}$ asociado al valor propio $\lambda$. Y sea $\hat{\mathbf{K}}$ un vector propio generalizado de $\mathbf{A}$. La solución general del sistema lineal (\ref{1}) es
En este caso las trayectorias son exactamente las mismas que en el caso 2a por el mismo análisis, sin embargo la dirección de las flechas es el opuesto debido a que $\lambda > 0$.
El plano fase es el siguiente.
Plano fase para valores propios positivos repetidos y sólo un vector propio linealmente independiente.
El punto de equilibrio $Y_{0} = (0, 0)$ es un repulsor e inestable.
Concluyamos esta entrada realizando un ejemplo por cada caso.
Comencemos con un ejemplo del caso 1a y 2a.
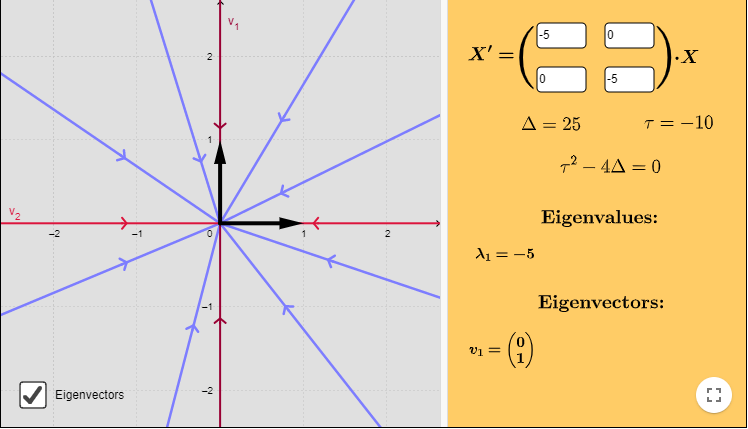
Ejemplo: Resolver el siguiente sistema lineal y hacer un análisis cualitativo de las soluciones.
Solución: Nuestro ejemplo corresponde a un sistema lineal de la forma (\ref{6}), de manera que el único valor propio es $\lambda = -5$. Sólo para verificarlo veamos que
Notemos que si $t \rightarrow \infty$, entonces $(x, y) \rightarrow (0, 0)$, lo que nos indica que las semirrectas correspondientes a las soluciones del sistema tienden al punto de equilibrio $Y_{0} = (0, 0)$, esto convierte a dicho punto en un atractor.
El plano fase, indicando algunas trayectorias y los vectores propios, se muestra a continuación.
Plano fase del sistema.
La función vectorial que define al campo vectorial es
$$F(x, y) = (-5x, -5y)$$
En la siguiente figura se muestra el campo vectorial y algunas trayectorias correspondientes a soluciones particulares del sistema.
Trayectorias y campo vactorial.
$\square$
Si modificamos el sistema del ejemplo anterior por
En este caso $x(t)$ y $y(t)$ tienden a infinito conforme $t$ también lo hace. Las trayectorias corresponden a semirrectas que parten del origen hacia infinito, por tanto, $Y_{0} = (0, 0)$ es un repulsor.
El plano fase es el siguiente.
Plano fase del sistema.
$\square$
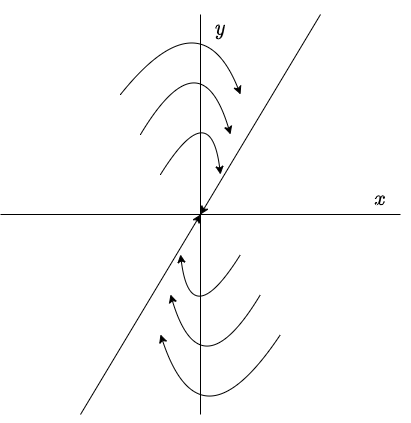
Ahora veamos un ejemplo para el caso 1b y uno para el caso 2b, es decir, en la situación en la que sólo tenemos un único vector propio.
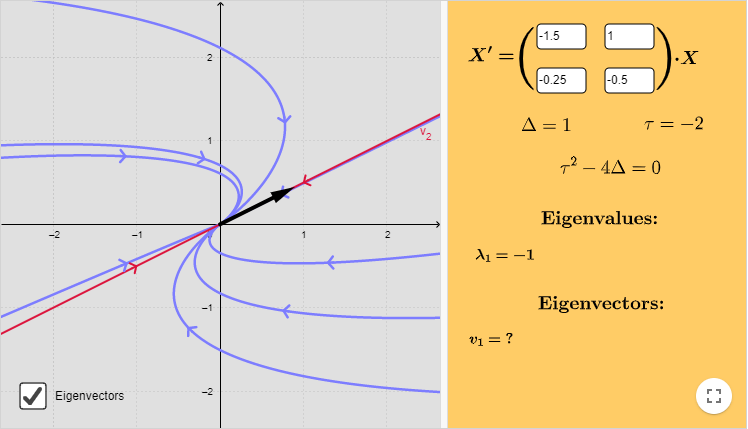
Ejemplo: Resolver el siguiente sistema lineal y hacer un análisis cualitativo de las soluciones.
Este resultado nos indica que las trayectorias del sistema tienden al origen. Para valores grandes de $t$ las funciones $x(t)$ y $y(t)$ se pueden aproximar por
Es decir, la tangente de las trayectorias tienden hacia la recta paralela al vector propio $\mathbf{K}_{1}$, esto lo podemos ver si escribimos a $y$ en función de $x$, dicha función es
$$y(x) \approx \dfrac{x}{2}$$
El plano fase, indicando algunas trayectorias y al único vector propio, se muestra a continuación.
Plano fase del sistema.
El punto de equilibrio $Y_{0} = (0, 0)$ es un atractor.
El campo vectorial lo obtenemos de la función vectorial
$$F(x, y) = \left( -\dfrac{3}{2}x + y, -\dfrac{1}{4}x -\dfrac{1}{2}y \right)$$
Dicho campo y algunas trayectorias se muestran a continuación.
Trayectorias y campo vectorial.
$\square$
Hemos concluido con el caso en el que los valores propios son repetidos. Para concluir con esta sección, en la siguiente entrada revisaremos el último caso en el que puede haber valores propios nulos.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Resolver los siguientes sistemas lineales y hacer un análisis cualitativo de las soluciones.
Estamos por concluir con el estudio cualitativo de los sistemas lineales homogéneos compuestos por dos ecuaciones diferenciales de primer orden con coeficientes constantes. En la siguiente entrada revisaremos el último caso en el que uno o ambos valores propios son nulos.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»