Introducción
En esta ocasión hablaremos sobre un tipo mas general de pares de rectas que las medianas y simedianas, estas son las rectas isogonales, esto nos permitirá hablar sobre pares de puntos mas generales que el centroide y el punto simediano, nos referimos a los puntos conjugados isogonales y a sus triángulos pedales.
Rectas isogonales
Definición 1. Dos rectas que pasan por el vértice de un ángulo tales que una es la reflexión de la otra respecto a la bisectriz del ángulo, se llaman rectas isogonales.
Teorema 1. Las distancias a los lados de un ángulo desde dos puntos en dos rectas que pasan por el vértice del ángulo son inversamente proporcionales si y solo si las rectas son isogonales.
Demostración. Si $AP$ y $AQ$ son dos rectas isogonales respecto del ángulo $\angle BAC$, considera $P_c$, $Q_c$, las proyecciones de $P$ y $Q$ en $AB$, y $P_b$, $Q_b$, las proyecciones de $P$ y $Q$ en $AC$.
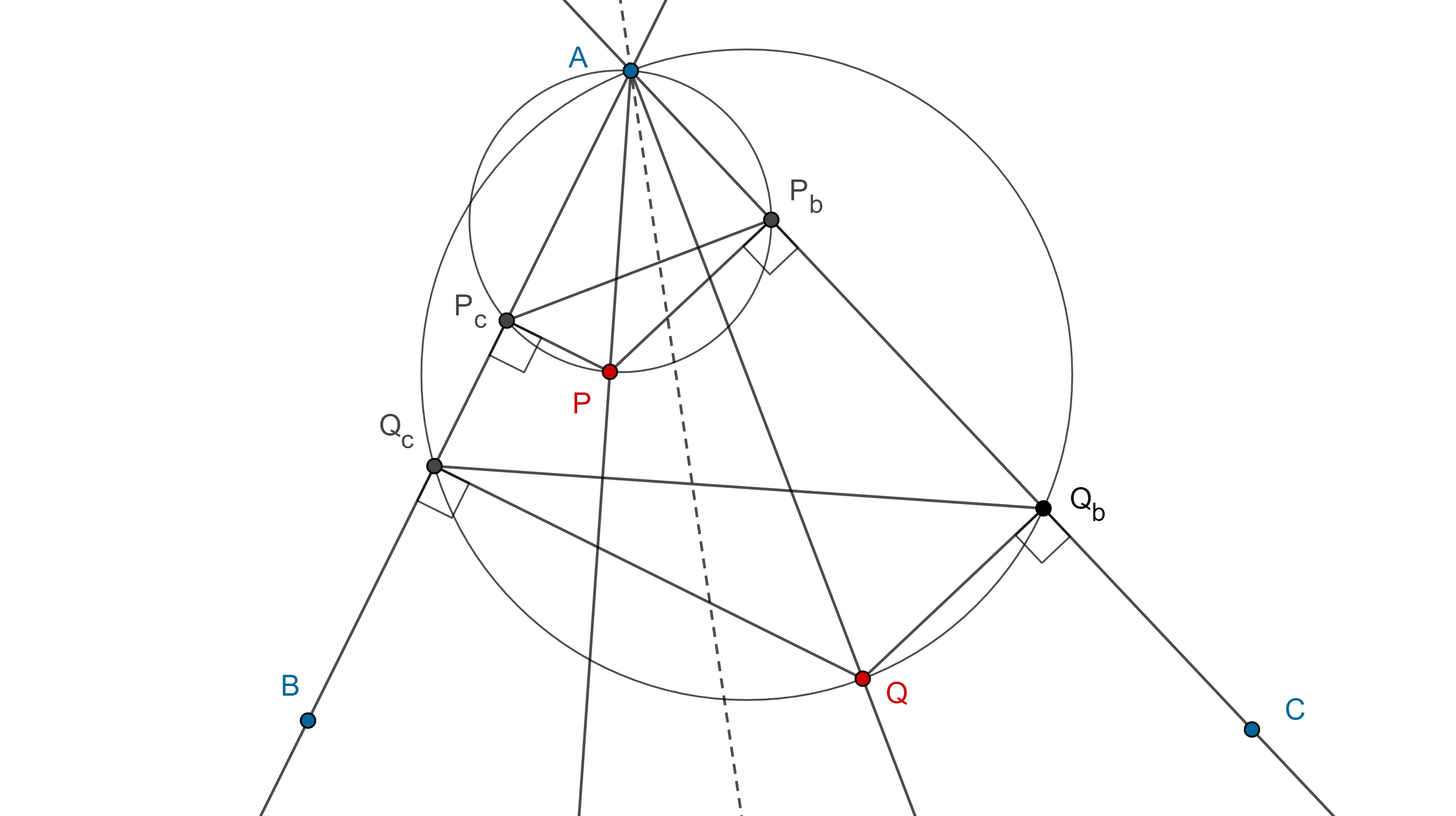
Como $AP$, $AQ$ son isogonales entonces $\angle BAP = \angle QAC$ y tenemos las siguientes semejanzas $\triangle APP_c \sim \triangle AQQ_b$, $\triangle APP_b \sim \triangle AQQ_c$ por lo tanto,
$\dfrac{PP_c}{QQ_b} = \dfrac{AP}{AQ} = \dfrac{PP_b}{QQ_c}$.
$\blacksquare$
Ahora supongamos que las distancias a los lados del ángulo, desde $P$ y $Q$, son inversamente proporcionales.
Notemos que los cuadriláteros $\square AP_cPP_b$, $\square AQ_cQQ_b$ son cíclicos, por lo tanto, los pares de ángulos $\angle BAC$, $\angle P_bPP_c$ y $\angle BAC$, $\angle Q_bQQ_c$ son suplementarios, entonces $\angle P_bPP_c = \angle Q_bQQ_c$.
Por hipótesis tenemos que $PP_c \times QQ_c = PP_b \times QQ_b$
$\Rightarrow \dfrac{PP_c}{QQ_b} = \dfrac{PP_b}{QQ_c}$.
Por criterio de semejanza LAL, $\triangle PP_bP_c \sim \triangle QQ_cQ_b$, y como$\square AP_cPP_b$, $\square AQ_cQQ_b$ son cíclicos, entonces
$\angle BAP = \angle P_cP_bP = \angle QQ_cQ_b = \angle QAC$.
Por lo tanto $AP$ y $AQ$ son isogonales.
$\blacksquare$
Puntos conjugados isogonales
Teorema 2. Si tres cevianas de un triángulo son concurrentes, entonces sus rectas isogonales respecto de los ángulos del triángulo son concurrentes, los puntos de concurrencia se llaman conjugados isogonales respecto al triángulo considerado.
Si en $\triangle ABC$, $AP$, $BP$, $CP$ son tres cevianas concurrentes, consideremos $Q$ la intersección de las isogonales $BQ$, $CQ$ de $BP$ y $CP$ respectivamente, sean $P_a$, $P_b$, $P_c$; $Q_a$, $Q_b$, $Q_c$, las proyecciones de $P$ y $Q$ en $BC$, $CA$ y $AB$ respectivamente.
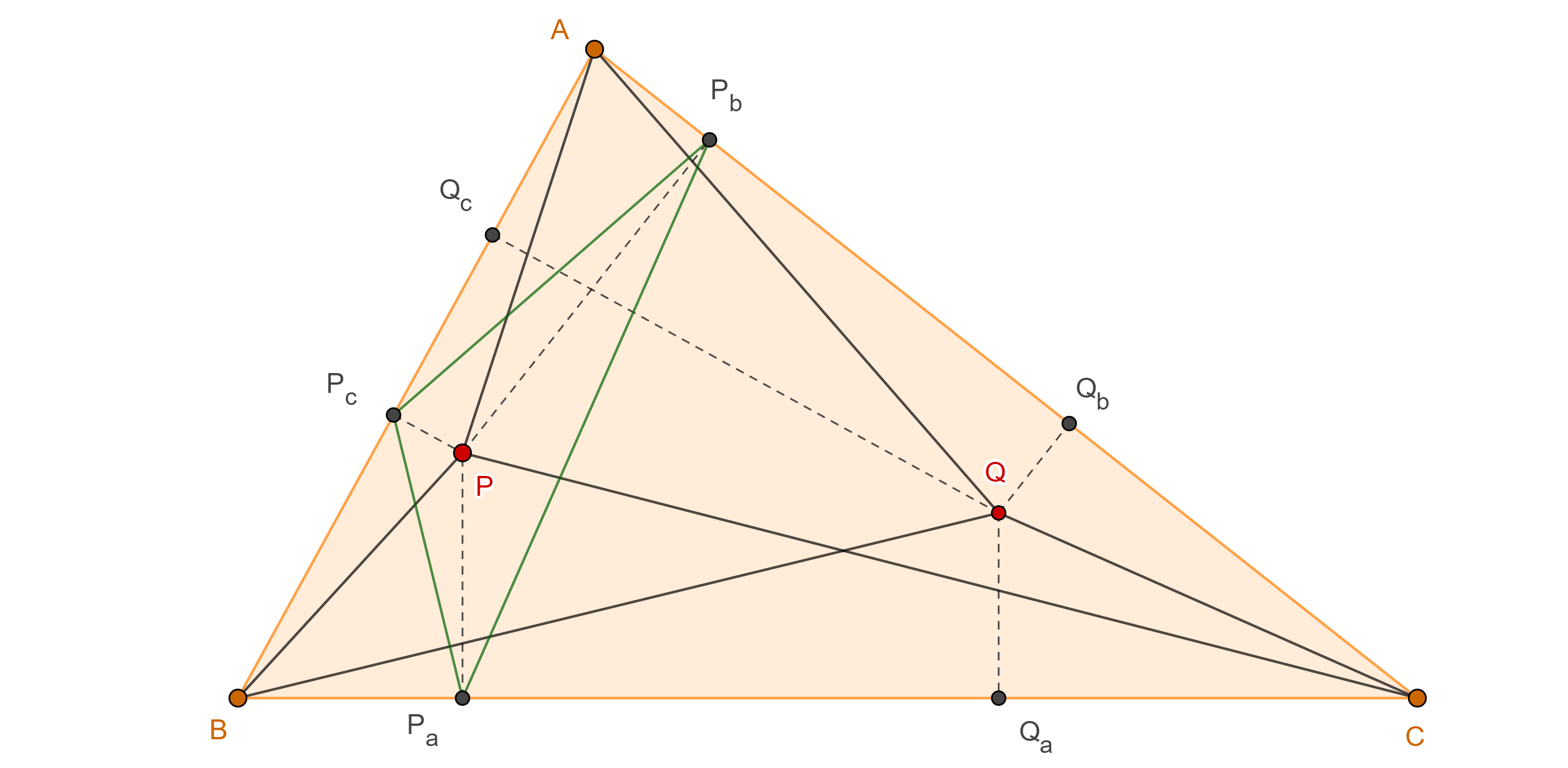
Por el teorema 1, $\dfrac{PP_a}{PP_c} = \dfrac{QQ_c}{QQ_a}$ y $\dfrac{PP_b}{PP_a} = \dfrac{QQ_a}{QQ_b}$.
Como resultado, $PP_c \times QQ_c = PP_a \times QQ_a = PP_b \times QQ_b$.
Por el teorema 1, $P$ y $Q$ están sobre rectas isogonales repecto de $\angle BAC$.
$\blacksquare$
Proposición 1. Dados un ángulo y un punto, la recta que une las proyecciones del punto a los lados del ángulo, es perpendicular a la isogonal a la recta que une el vértice del ángulo con el punto dado.
Demostración. En la entrada simediana probamos la misma proposición, pero para simedianas y medianas, la demostración permanece igual para el caso general.
$\blacksquare$
Corolario. Dados un triángulo $\triangle ABC$ y un punto $P$, las perpendiculares desde los vértices del triángulo a los lados del triángulo pedal de $P$ respecto de $\triangle ABC$, concurren en el conjugado isogonal de $P$ respecto de $\triangle ABC$.
Demostración. Aplicamos la proposición anterior a los tres ángulos del triángulo y recordamos que las tres isogonales a $AP$, $BP$ y $CP$ son concurrentes (figura 2).
$\blacksquare$
Proposición 2. El conjugado isogonal de un punto respecto a un triángulo es un punto al infinito si y solo si el punto se encuentra en el circuncírculo del triángulo.
Demostración. Sean $\triangle ABC$, y $P$ un punto, recordemos que el triángulo pedal de $P$ respecto de $\triangle ABC$ degenera en una recta, la recta de Simson, sí y solo si $P$ esta en el circuncírculo de $\triangle ABC$.

Por la proposición 1, las rectas isogonales a $AP$, $BP$, $CP$, respecto de los ángulos de $\triangle ABC$ son perpendiculares a los lados del triángulo pedal, por lo tanto estas rectas son paralelas si y solo si las proyecciones de $P$ en los lados de $\triangle ABC$ son colineales.
Ya que las rectas paralelas se intersecan en un punto ideal y las isogonales a $AP$, $BP$, $CP$ se intersecan en el conjugado isogonal a $P$, se tiene el resultado.
$\blacksquare$
Circulo pedal de conjugados isogonales
Proposición 3. Las proyecciones a los lados de un ángulo desde dos puntos en dos rectas isogonales son cíclicos y el centro de la circunferencia es el punto medio entre $P$ y $Q$.
Demostración. En la demostración del teorema 1, vimos que se tienen la siguientes semejanzas, $\triangle APP_c \sim \triangle AQQ_b$, $\triangle APP_b \sim \triangle AQQ_c$, es decir,
$\dfrac{AP_c}{AQ_b} = \dfrac{AP}{AQ} = \dfrac{AP_b}{AQ_c}$
$\Rightarrow AP_c \times AQ_c = AP_b \times AQ_b$.
Por el teorema de las cuerdas, $\square P_cQ_bP_bQ_c$ es un cuadrilátero cíclico.
Por otra parte, en $\triangle P_cQ_cP$, la mediatriz de $P_cQ_c$ es paralela a $P_cP$ y pasa por el punto medio de $P_cQ_c$, por lo tanto pasa por el punto medio de $PQ_c$.
En $\triangle PQ_cQ$ la mediatriz de $P_cQ_c$ es paralela a $Q_cQ$ y pasa por el punto medio de $PQ_c$ por lo tanto pasa por el punto medio de $PQ$.
Igualmente vemos que la mediatriz de $P_bQ_b$ pasa por el punto medio de $PQ$.
Como $P_cQ_c$ y $P_bQ_b$ son cuerdas de la circunferencia sus mediatrices se intersecan en el centro, por lo tanto este coincide con el punto medio de $PQ$.
$\blacksquare$
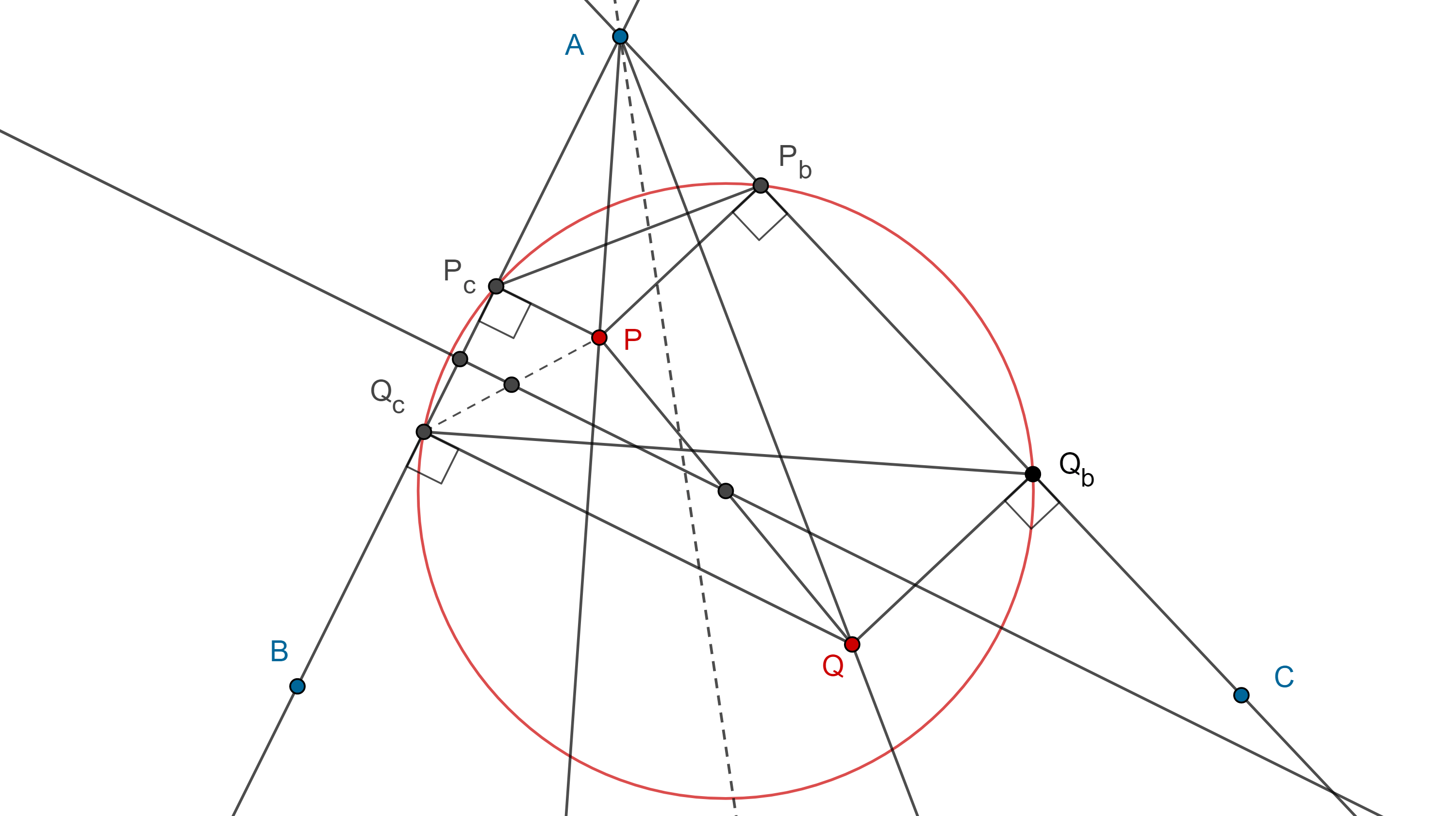
Teorema 3. Los triángulos pedales de dos puntos que son conjugados isogonales respecto a un triángulo tienen el mismo circuncírculo y su centro es el punto medio entre los puntos isogonales, esta circunferencia se conoce como circulo pedal de los puntos conjugados isogonales.
Demostración. Sean $O$ el punto medio de $PQ$ y $\triangle P_aP_bP_c$, $\triangle Q_aQ_bQ_c$, los triángulos pedales de $P$ y $Q$.
Por la proposición anterior, $\square Q_cP_CQ_bP_b$ es cíclico, con centro en $O$, $\square Q_cP_cP_aQ_a$ es cíclico con centro en $O$, $\square P_bP_aQ_aQ_b$ es cíclico con centro en $O$.
Como estas tres circunferencias son concéntricas y tienen el mismo radio, son la misma.
$\blacksquare$
Teorema 4. Dado un triángulo $\triangle ABC$ y un punto $P$, el circuncírculo del triángulo pedal de $P$ respecto de $\triangle ABC$, corta a los lados de $\triangle ABC$ en los vértices del triángulo pedal del conjugado isogonal de $P$ respecto a $\triangle ABC$.
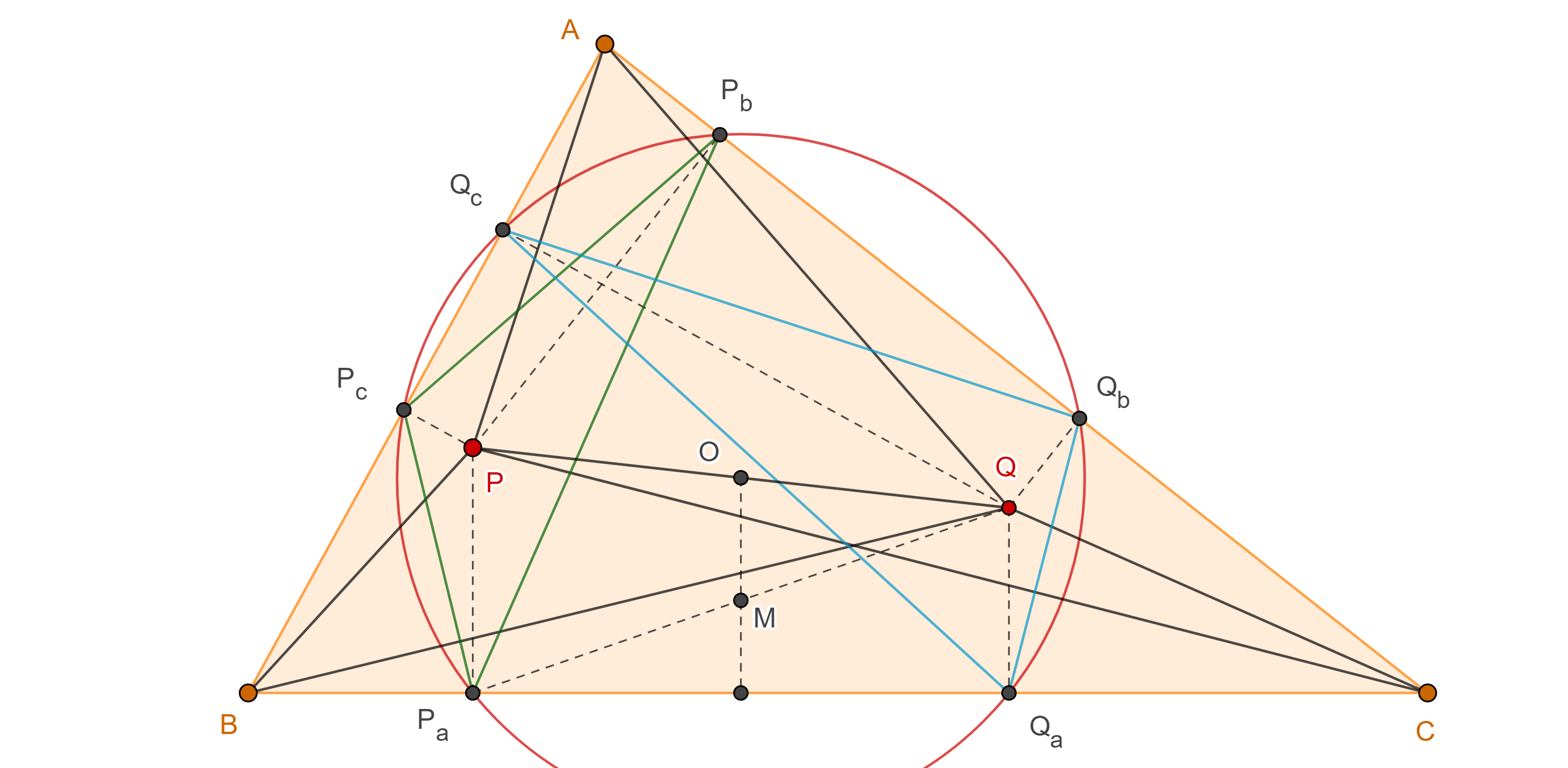
Demostración. Si $\triangle P_aP_bP_c$ es el triángulo pedal de $P$ (figura 5), sean $Q_a \in BC$, $Q_b \in CA$, $Q_c \in AB$, las otras tres intersecciones de $\Gamma(O)$, el circuncírculo de $\triangle P_aP_bP_c$ con $\triangle ABC$, consideremos $Q$ el conjugado isogonal de $P$ respecto $\triangle ABC$ y $OM \parallel PP_a$, con $M \in P_aQ$.
Como $OM \parallel PP_a$ y pasa por el punto medio de $PQ$ entonces $M$ es el punto medio de $P_aQ$.
Como $OM \perp P_aQ_a$ y pasa por $O$ entonces es la mediatriz de $P_aQ_a$ y por lo tanto biseca a $P_aQ_a$.
Ya que $OM$ biseca a $P_aQ_a$ y $P_aQ$ entonces $OM \parallel QQ_a$.
Por lo tanto, $QQ_a \perp BC$, igualmente vemos que $QQ_b \perp CA$, $QQ_c \perp AB$.
En consecuencia, $\triangle Q_aQ_bQ_c$ es el triángulo pedal de $Q$.
$\blacksquare$
Proposición 4. Dado un triángulo $\triangle ABC$ y un punto $P$, el centro del circuncírculo del triángulo cuyos vértices son las reflexiones de $P$ respecto de los lados de $\triangle ABC$, es el conjugado isogonal de $P$ respecto de $\triangle ABC$.
Demostración. Sean $P_a’$, $P_b’$, $P_c’$, las respectivas reflexiones de $P$ respecto de $BC$, $CA$ y $AB$, considera $\triangle P_aP_bP_c$ el triángulo pedal de $P$ respecto de $\triangle ABC$.
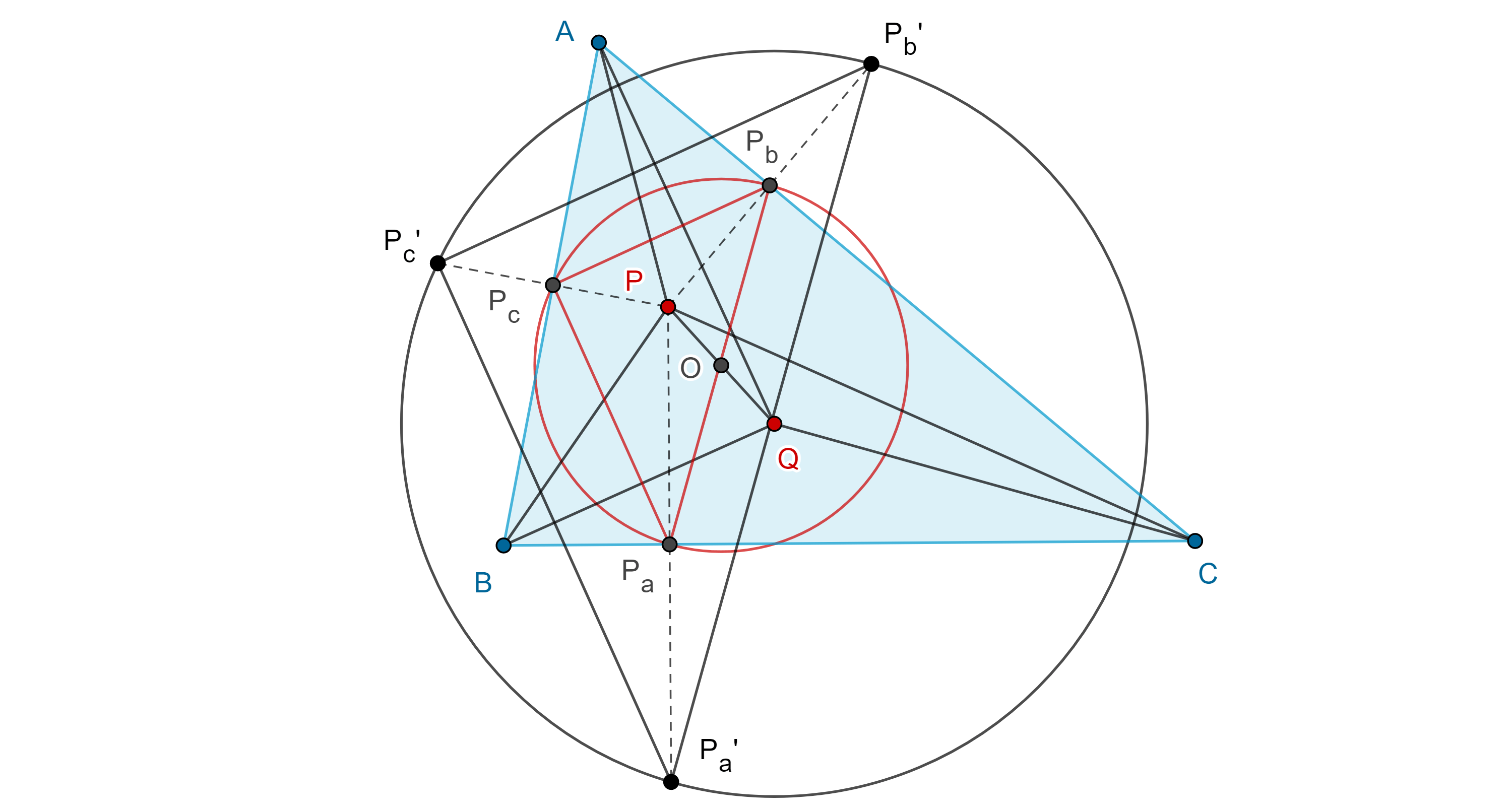
Por construcción, $P$ es el centro de homotecia entre $\triangle P_aP_bP_c$ y $\triangle P_a’P_b’P_c’$ con razón de homotecia $2$, por lo tanto, sus respectivos circuncírculos y sus circuncentros también están en homotecia con centro en $P$ y razón $2$.
En consecuencia, si $O$ es el circuncentro de $\triangle P_aP_bP_c$, entonces el circuncentro de $\triangle P_a’P_b’P_c’$ se encuentra en la reflexión $Q$, de $P$ respecto de $O$.
Por el teorema 3, $Q$ el conjugado isogonal de $P$ respecto de $\triangle ABC$.
$\blacksquare$
Triángulo antipedal
Definición 2. Dado un triángulo $\triangle ABC$ y un punto $P$, el triángulo $\triangle A’B’C’$ formado por las perpendiculares a $AP$, $BP$, $CP$, por los vértices de $\triangle ABC$ se llama triángulo antipedal de $P$ respecto de $\triangle ABC$
Notemos que $\triangle ABC$ es el triángulo pedal de $P$ respecto de $\triangle A’B’C’$.
Proposición 5. Sean $\triangle ABC$ y $P$ un punto, entonces el triángulo antipedal de $P$ respecto de $\triangle ABC$ y el triángulo pedal del conjugado isogonal de $P$ respecto de $\triangle ABC$ son homotéticos.

Demostración. Sea $Q$ el conjugado isogonal de $P$ respecto de $\triangle ABC$, consideremos $Q_a \in BC$, $Q_b \in CA$, $Q_c \in AB$, las proyecciones de $Q$ en lados de $\triangle ABC$.
Por la proposición 1, la isogonal $CP$, de $CQ$, es perpendicular a $Q_aQ_b$ entonces $A’B’ \parallel Q_aQ_b$ (figura 7).
Igualmente vemos que $B’C’ \parallel Q_bQ_c$ y $C’A’ \parallel Q_cQ_a$.
Por lo tanto, existe una homotecia entre $\triangle A’B’C’$ y $\triangle Q_aQ_bQ_c$.
$\blacksquare$
Área del triangulo pedal
Teorema 5, de Euler. Sean $\triangle ABC$ y $P$ un punto, considera $\triangle P_aP_bP_c$ el triángulo pedal de $P$ respecto de $\triangle ABC$ y $(O, R)$ el circuncírculo de $\triangle ABC$, entonces podemos calcular el área de $\triangle P_aP_bP_c$ mediante la siguiente formula:
$(\triangle P_aP_bP_c) = \dfrac{|R^2 – OP^2|}{4R^2} (\triangle ABC)$.
Demostración. Sean $D$, $E$, $F$ las segundas intersecciones de $AP$, $BP$, $CP$ con $(O, R)$, veamos que $\triangle P_aP_bP_c$ y $\triangle DEF$ son semejantes.

Tomando en cuenta que $\square PP_cP_bA$ y $\square PBP_aP_c$ son cíclicos tenemos:
$\angle DFE = \angle DFP + \angle PFE $
$= \angle DAC + \angle CBE = \angle PAP_b + \angle P_aBP $
$= (\pi – \angle P_bP_cP) + (\pi – \angle PP_cP_a)$
$ = 2\pi – \angle P_bP_cP_a = \angle P_aP_cP_b$.
De manera similar vemos que $\angle EDF = \angle P_bP_aP_c$ y $\angle FED = \angle P_cP_bP_a$, $\Rightarrow \triangle P_aP_bP_c \sim \triangle DEF$.
Al triángulo $\triangle DEF$ se le conoce como triángulo circunscrito de Ceva de $P$ respecto de $\triangle ABC$.
Recordemos que podemos calcular el área de un triángulo como el producto de sus lados entre cuatro veces su circunradio, si $R_p$ es el circunradio de $\triangle P_aP_bP_c$, entonces
$\begin{equation} \dfrac{(\triangle P_aP_bP_c)}{(\triangle ABC)} = \dfrac{P_aP_b}{AB} \times \dfrac{P_bP_c}{BC} \times \dfrac{P_cP_a}{CA} \times \dfrac{R}{R_p}. \end{equation}$
Con el fin de calcular la última ecuación, consideremos los siguientes argumentos.
Como $\triangle P_aP_bP_c \sim \triangle DEF$ entonces $\dfrac{R}{R_p} = \dfrac{DE}{P_aP_b}$.
Ya que $\square ABDE$ es cíclico, entonces $\triangle PAB \sim \triangle PED$, esto es
$\dfrac{PA}{PE} = \dfrac{AB}{ED}$.
También, como $\square PP_cP_bA$ y $\square PBP_aP_c$ $\square PP_aCP_b$ son cíclicos y aplicando la ley extendida de los senos tenemos,
$P_bP_c = PA \sin \angle A$ y $P_cP_a = PB \sin \angle B$.
Ahora, aplicamos la ley extendida de los senos en $\triangle ABC$,
$\dfrac{\sin \angle A}{BC} =\dfrac{1}{2R} = \dfrac{\sin \angle B}{AC}$.
Finalmente, la potencia de $P$ respecto de $(O, R)$ es $PB \times PE = |R^2 – OP^2|$.
Sustituyendo lo anterior en $(1)$ obtenemos:
$\dfrac{(\triangle P_aP_bP_c)}{(\triangle ABC)} = \dfrac{P_aP_b}{AB} \times \dfrac{PA \sin \angle A}{BC} \times \dfrac{PB \sin \angle B}{CA} \times \dfrac{DE}{P_aP_b}$
$= \dfrac{PE}{PA} \times \dfrac{PA \times PB}{(2R)(2R)}$
$= \dfrac{|R^2 – OP^2|}{4R^2}$.
$\blacksquare$
Más adelante…
En la siguiente entrada hablaremos sobre un par de puntos conjugados isogonales en particular, se trata de los puntos de Brocard, que tienen algunas propiedades especiales dentro de un triángulo.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
- Muestra que:
$i)$ el ortocentro y el circuncentro de un triángulo son conjugados isogonales,
$ii)$ el incentro y los excentros de un triángulo son sus propios conjugados isogonales. - Sea $P$ un punto dentro de un triangulo $\triangle ABC$, considera a $Q$ su conjugado isogonal, muestra que $\angle BPC + \angle BQC = \pi + \angle BAC$.
- Sean $P$ y $Q$ puntos conjugados isogonales respecto a un triangulo $\triangle ABC$, prueba que $\dfrac{AP \times AQ}{AB \times AC} + \dfrac{BP \times BQ}{BA \times BC} + \dfrac{CP \times CQ}{CA \times CB} = 1$.
- Sean $\triangle ABC$ y $P$ un punto en su interior, considera $\triangle P_aP_bP_c$ el triángulo pedal de $P$ respecto $\triangle ABC$, supón que $P_aP_b \perp P_aP_c$, muestra que el conjugado isogonal de $P$ respecto de $\triangle ABC$ es el ortocentro de $\triangle AP_bP_c$.
- En la figura 7, muestra que el producto de los triángulos homotéticos es igual al cuadrado del área de $\triangle ABC$.
Entradas relacionadas
- Ir a Geometría Moderna I.
- Entrada anterior del curso: Circunferencias de Lemoine.
- Siguiente entrada del curso: Puntos de Brocard.
- Otros cursos.
Fuentes
- Altshiller, N., College Geometry. New York: Dover, 2007, pp 267-273.
- Andreescu, T., Korsky, S. y Pohoata, C., Lemmas in Olympiad Geometry. USA: XYZ Press, 2016, pp 95-108.
- Lozanovski, S., A Beautiful Journey Through Olympiad Geometry. Version 1.4. 2020, pp 169-176.
- Johnson, R., Advanced Euclidean Geometry. New York: Dover, 2007, pp 153-157.
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»