Este curso es la continuación de la materia Cálculo Diferencial e Integral I. En el primer curso de cálculo hablamos del cálculo diferencial. Nuestro principal objeto matemático fue la derivada y cómo se puede interpretar como la razón de cambio del objeto de análisis: la tangente de una curva, la velocidad y aceleración de una partícula, la variación de un objeto en su trayectoria, etc.
En este siguiente curso hablaremos de temas relacionados con el cálculo integral. Hablaremos un poco de sus orígenes, de los principales objetos matemáticos que estudia, de varios aspectos fundamentales de su teoría y de sus aplicaciones. El objetivo principal de esta rama matemática es el estudio de las integrales y las anti-derivadas. Una motivación importante es que ellas son una herramienta para la solución de problemas de cálculo de áreas y de volúmenes.
Así, el objeto matemático estelar del curso será la integral y la motivaremos mediante su gran utilidad para el cálculo de áreas. Sin embargo, esto no será lo único que haremos. La definiremos formalmente, probaremos las muchas propiedades matemáticas que tiene y veremos numerosas aplicaciones no sólo al cálculo de integrales, sino también a la construcción de otros objetos matemáticos fundamentales como la función exponencial.
Es muy probable que ya cuentes con una buena noción de área. En cursos de primaria, secundaria y bachillerato se explica un poco de esto y se dan fórmulas para calcular áreas. Sin embargo, estas fórmulas no salen de la nada. Pueden ser construidas a partir de nociones más básicas y por distintos métodos. Uno de ellos es la integración. Hasta que hagamos más precisiones formales, puedes aprovechar la intuición que ya tienes sobre las áreas y pensar en ellas intuitivamente como una magnitud que «mide» qué tan grande es una región contenida dentro de ciertos límites y cuyas unidades están «al cuadrado». Esto te ayudará a tener en qué cimentar tu intuición para cuando demos una definición más formal.
Algunas notas históricas
Históricamente, se han encontrado casos de utilización de de herramientas de cálculo diferencial en trabajos antiguos, por ejemplo, los trabajos de Arquímedes. Pero fue hasta los siglos XVI y XVII donde se tuvo un desarrollo sistemático, atribuido a Isaac Newton y Gottfried Leibniz, quienes son considerados como los dos grandes pioneros y más grandes representantes del Cálculo. Sin embargo, no fueron los únicos aportadores a éste.
Otra persona importante, Isaac Barrow, quién sería el profesor de Newton, tenía una comprensión sobre la reciprocidad entre la derivación e integración. Este concepto es el punto de partida del cálculo desarrollado por Newton y Leibnitz. Es primordial pues da pie a la introducción y demostración de los dos teoremas fundamentales del cálculo.
Método exhaustivo
A modo de introducción, platicaremos en esta entrada sobre el método exhaustivo. Es un método matemático que utiliza la geometría para aproximar algún resultado o aproximar a la solución un problema que tengamos. La característica que tiene el método es que, a la vez que aumenta el cálculo o las repeticiones, aumenta el grado de precisión de nuestra aproximación con respecto al resultado que queremos.
Arquímides desarrolló una de las aplicaciones de este método para el cálculo de áreas planas. Eudoxo también trabajó con este método, sólo que su objetivo era calcular el volumen de las pirámides de Egipto. En cierto sentido, también ya usamos este método cuando hablamos de la derivada de una función. Para pensar en la tangente en un punto $P$ a la gráfica de una función, la intuición (y de hecho, en cierto sentido la definición formal) consistió en tomar rectas secantes que pasaran por $P$ y otro punto $Q$ en la gráfica. Conforme $Q$ se acercaba a $P$ nos aproximábamos más y más a la tangente y, si cierto límite existía, justo esa era la definición de tangente.
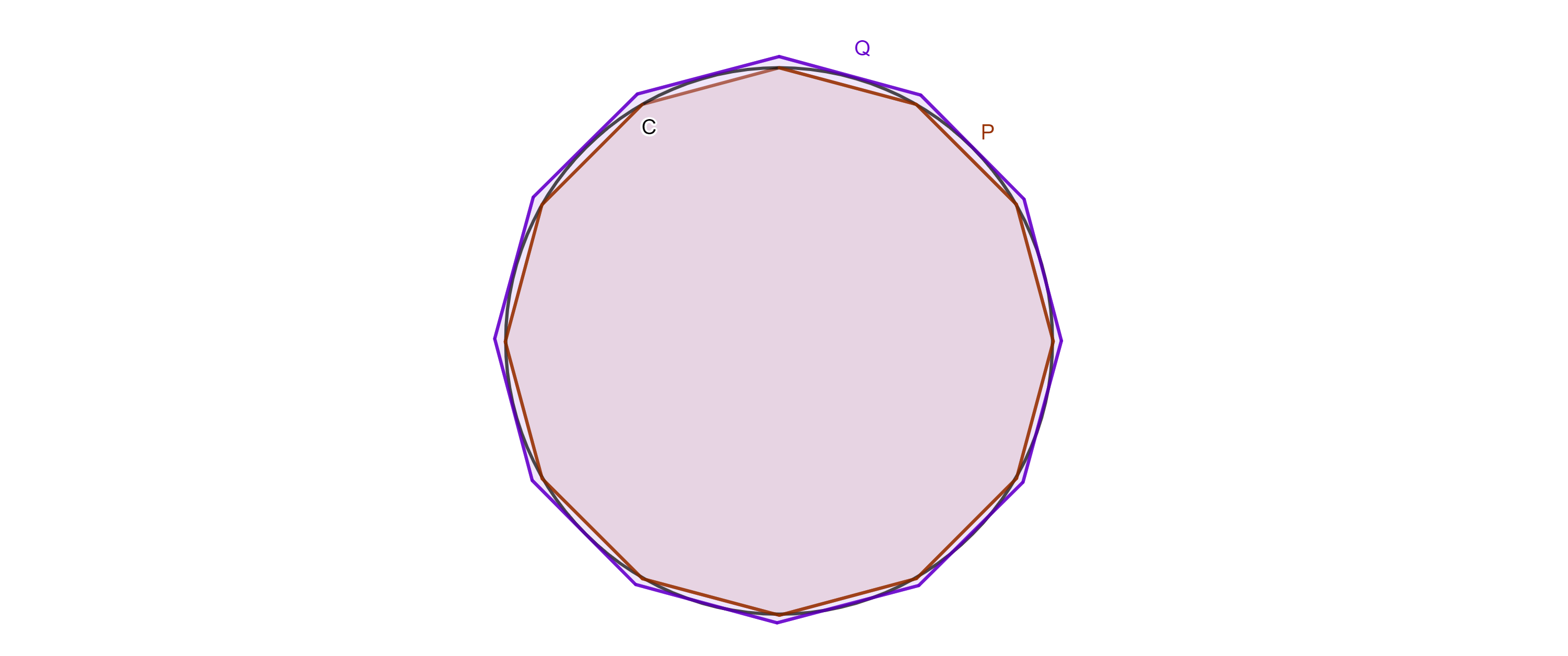
Para ejemplificar nuevamente el método exhaustivo, veremos cómo encontrar de manera un poco informal el el área de un círculo. Sea $C$ un círculo y sea $M\geq 3$ un número natural. Tomemos $P_M$ un polígono regular de $M$ lados inscrito al círculo $C$ y $Q_M$ un polígono de $M$ lados circunscrito al círculo $C$. Para que dichos polígonos queden bien definidos, podemos pedir además que su lado inferior sea horizontal. Por ejemplo, en la figura a continuación se muestra el caso $M = 5$.
Notemos que los polígonos que definimos tienen dos áreas: una que incluye al área del círculo y otra que está incluida en el círculo.
Para cada valor de $M$ tenemos dos polígonos. De este modo, estamos generando dos sucesiones de polígonos: la de polígonos inscritos $\{P_M\}_{M\geq 3}$ y la de polígonos circunscritos $\{Q_M\}_{M\geq 3}$. Notemos que el área cada uno de los polígonos inscritos $P_M$ queda acotada superiormente por el área de cada uno de los polígonos $Q_M$; a su vez, el área de cada uno de los polígonos circunscritos $Q_M$ queda acotada inferiormente por el área de cada uno de los polígonos $P_M$. Además, no es muy difícil convencerse de que el área de los polígonos inscritos crece conforme $M$ aumenta y, en contraparte, el área de los circunscritos decrece conforme $M$ aumenta. Recordando del primer curso de cálculo lo que sabemos sobre supremos, ínfimos y sobre sucesiones monótonas y acotadas, tendríamos entonces que los siguientes dos límites existen:
Además, $p\leq q$. De hecho, si el área del círculo $C$ que nos interesa es $c$, entonces por lo que mencionamos arriba tendríamos que $p \leq c \leq q$. Nuestra intuición nos dice que cuando la $M$ aumenta, generamos un polígono con más lados que van acercándose a la circunferencia, y que en el límite debemos obtener el área de la circunferencia. Por lo tanto, esperaríamos que $p=c=q$.
¿Qué sería suficiente para respaldar esta intuición? ¿Bastaría que calculáramos explícitamente $\lim_{M\to \infty} \text{área}(P_M)$ y $\lim_{M\to \infty} \text{área}(Q_M)$ (por ejemplo, dividiendo los polígonos en triángulos para encontrar una fórmula explícita) y que viéramos que son iguales? Esto seguro aumentaría mucho la confianza en nuestro procedimiento. Pero, ¿qué tal que aproximamos al círculo con otros polígonos que no son regulares? ¿nos dará lo mismo? Nuestra definición formal de área ayudará a resolver estas dudas.
En resumen, el método iterativo nos permite aproximar el área del círculo, encerrándolo entre 2 polígonos, de los cuales sabemos calcular el área mediante triángulos. Intuitivamente, mientras más fraccionemos los polígonos, la aproximación del área del círculo será mejor. Esta idea de «encerrar» el área que nos interesa entre dos áreas que sepamos (o acordemos) cómo calcular será clave cuando definamos la integral definida.
Más adelante…
En esta entrada hablamos brevemente sobre la conexión de este curso de cálculo con el anterior. Dimos unas pocas notas históricas e introducimos la idea del método exhaustivo. En la siguiente entrada comenzaremos a formalizar estas ideas para el cálculo de áreas entre la gráfica de una función y el eje $x$.
Tarea moral
Con las herramientas de geometría que has adquirido en la educación básica, intenta completar el ejemplo que comenzamos sobre el método exhaustivo. No te preocupes mucho por la formalización de límites, funciones trigonométricas, fórmulas de áreas de triángulos, etc. Es parte de lo que haremos en este curso. Entre otras cosas, tendrás que:
Calcular explícitamente la distancia del centro de un círculo $C$ de radio $r$ a un vértice (y a un lado) del polígono inscrito (y circunscrito) en $C$ que es regular y de $n$ lados.
Encontrar el área de $P_n$ y $Q_n$.
Encontrar los límites de estas áreas conforme $n$ tiende a infinito.
Investiga más sobre los orígenes del cálculo integral.
Averigua sobre el método exhaustivo y otros usos históricos que se le ha dado.
El método exhaustivo puede ser algo peligroso si se usa apresuradamente. Por ejemplo, toma un cuadrado de lado $1$ y divídelo en cuadrados pequeños para formar un tablero de $n\times n$. Mediante un camino $C_n$ que sube y va a la derecha alternadamente, se puede comenzar en el vértice inferior izquierdo y llegar al vértice superior derecho. Intuitivamente, cuando $n$ tiende a infinito, este camino pareciera converger a la diagonal del cuadrado, la cual tiene longitud $\sqrt{2}$. Sin embargo, la longitud de cada camino $C_n$ siempre es $2$ pues en total avanza una unidad a la derecha y una hacia arriba. ¿Por qué la longitud de $C_n$ no tiende a $\sqrt{2}$ si aparentemente $C_n$ tiende a la diagonal del cuadrado?
Realiza un repaso de los teoremas principales de Cálculo Diferencial e Integral I. ¡Te serán sumamente útiles para este curso! En particular, sería bueno que revises los siguientes temas:
En la entrada anterior se introdujo el problema de calcular el área que se encuentra en una región delimitada por ciertas líneas verticales, el eje $x$ y la gráfica de una función. Hablamos de cómo aproximar esta área cuando la función es «bien portada», pero aún no hemos dicho a qué se refiere esto. En esta entrada haremos una formalización de este concepto mediante la definición de integral definida.
La intuición que puedes tener a lo largo de la entrada es que para poder hablar de que una función sea integrable en cierto intervalo, intuitivamente necesitamos que las sumas de Riemann convergan a un valor conforme hacemos las celdas tender a cero en longitud. Esto diría que sin importar cómo hagamos la partición, las sumas de Riemann deben converger a un mismo valor conforme la partición se hace más y más fina. En particular, necesitaremos que las sumas superiores e inferiores cumplan esto. Como en ellas entendemos bien qué pasa con los refinamientos, entonces nos conviene más dar la definición en términos de ellas. Es lo más conveniente y, en particular, implica lo anterior.
Integral definida de Riemann
La definición clave que estudiaremos es la siguiente.
Definición. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Sea $\mathbf{P}$ el conjunto de las particiones de $[a,b]$. Definimos
es decir al supremo de las sumas inferiores y al ínfimo de las sumas superiores sobre todas las particiones posibles de $[a,b]$. Diremos que existe la integral definida de Riemann para $f$ en el intervalo $[a,b]$ si
$$ \underline{S(f)} = \overline{S(f)}.$$
En este caso, a este valor en común lo denotamos por $$\int \limits_{a}^{b} f(x) dx.$$
En otras palabras, para que $f$ sea integrable, necesitamos que el ínfimo de las sumas superiores sea igual al supremo de las sumas inferiores. A veces también decimos que $f$ es Riemann integrable en $[a,b]$ o, si el contexto es claro, simplemente que es integrable.
No todas las funciones son Riemann integrables. Hacia el final de esta unidad daremos ejemplos de funciones que no lo son. Sin embargo, por ahora nos enfocaremos en ver algunos ejemplos que sí son Riemann integrables y probar propiedades de la integral definida en los casos en los que sí exista.
Ejemplo de integral definida
Veamos un ejemplo sencillo de cómo se verifica la definición de integral definida.
Ejemplo. Tomemos la función $f:[0,1]\to \mathbb{R}$ dada por $f(x)=x$. Veamos que dicha función es integrable en el intervalo $[0,1]$. Para ello, demos la partición $P_n$ homogénea del intervalo $[0,1]$ en celdas de longitud $1/n$, con $n$ un entero positivo. Si hacemos esto, las celdas de la partición son
$$[0,1/n],[1/n,2/n],\ldots[(n-1)/n,1].$$
Los supremos de los valores de $f$ en dicho intervalo son
$$1/n, 2/n, \ldots, 1,$$
y los ínfimos son
$$0,1/n, \ldots, (n-1)/n.$$
De este modo, para esta partición la suma superior sería
La sucesión de números $\frac{1}{2}+\frac{1}{2n}$ se acerca tanto como queramos a $\frac{1}{2}$ por arriba. Como el ínfimo $\overline{S}(f)$ que estamos buscando es cota inferior de todas las sumas inferiores, en particular es de estas que vienen de particiones homogéneas. Así, $\overline{S}(f)\leq \frac{1}{2}$. Pero además, por una proposición de la entrada anterior sabemos que cualquier suma inferior es cota inferior de todas las sumas inferiores. Como $\overline{S}(f)$ es la mayor cota inferior, tenemos que $\overline{S}(f)\geq \frac{1}{2}-\frac{1}{2n}$ para todo $n$, y entonces $\overline{S}(f)\geq \frac{1}{2}$. Todo esto nos permite concluir que $\overline{S}(f)=\frac{1}{2}$.
De manera totalmente análoga (que te sugerimos argumentar cuidadosamente), se tiene que $\underline{S}(f)=\frac{1}{2}$. Concluimos entonces que $f$ es integrable en $[0,1]$ y que $$\int_0^1 f(x)\, dx = \frac{1}{2}.$$
$\triangle$
Aunque este ejemplo tuvo un intervalo y una función muy sencillas, se volvió algo elaborado justificar la parte de los ínfimos y supremos. Es por ello que nos conviene enunciar y demostrar algunos resultados sobre funciones integrables que nos permitirán determinar la integrabilidad con más comodidad.
Integral definida mediante particiones homogéneas y la condición de Riemann
Lo primero que haremos es demostrar que para que una función sea integrable, nos basta estudiar a las particiones homogéneas.
Teorema. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Sea $P_n$ la partición homogéneas del intervalo $[a,b]$ en $n$ partes. Supongamos que se da la siguiente igualdad de límites:
Entonces, la integral existe y es igual a ese límite en común.
Demostración. $\Leftarrow)$ La demostración sigue argumentos muy parecidos al ejercicio que presentamos como ejemplo arriba. Supongamos que los límites para las particiones homogéneas existen y son iguales a $L$. Estudiemos $\overline{S}(f)$. Por ser ínfimo de todas las sumas superiores, tendríamos en particular para las particiones homogéneas que $$\overline{S}(f)\leq \overline{S}(f,P_n),$$
para todo entero positivo $n$. Haciendo tender $n$ a infinito, obtenemos $\overline{S}(f) \leq L$. Por otro lado, sabemos que cualquier suma inferior es cota inferior de cualquier suma superior, en particular, cada $\underline{S}(f,P_n)$ es una de estas cotas inferiores. Como $\overline{S}(f)$ es la mayor de las cotas inferiores, tendríamos que $$\overline{S}(f)\geq \underline{S}(f,P_n).$$
Haciendo tender $n$ a infinito, obtenemos $\overline{S}(f)\geq L$. Así, $\overline{S}(f)=L$. Un argumento análogo demuestra que $\underline{S}(f)=L$, y por lo tanto la función es integrable en $[a,b]$.
$\square$
Un siguiente resultado importante es la condición de Riemann, que nos dice que para que una función sea integrable, nos basta encontrar una partición en donde la suma superior y la inferior estén tan cerca como querramos. A esto se le conoce como la condición de Riemann.
Teorema. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Se tiene que $f$ es integrable en $[a,b]$ si y sólo si para todo $\epsilon >0$ existe una partición $P_\epsilon$ tal que:
Demostración. $\Rightarrow )$ Sea $f$ integrable. Debemos mostrar que para cada $\epsilon>0$ existe una partición $P_\epsilon$ tal que $$\overline{S}(f,P_\epsilon) \ – \ \underline{S}(f,P_\epsilon) < \epsilon.$$
Para ello, tomemos $\epsilon^*=\epsilon/2$. Como $\overline{S}(f)$ es ínfimo de las sumas superiores, entonces $\overline{S}(f)+\epsilon^\ast$ ya no es cota inferior para dichas sumas superiores, por lo que existe una partición $P$ tal que $\overline{S}(f,P) < \overline{S}(f)+\epsilon^*$. Así mismo, existe una partición $P’$ tal que $\underline{S}(f,P’) > \underline{S}-\epsilon^*$. Si $P_\epsilon$ es un refinamiento mutuo de $P$ y $P’$, tendríamos entonces que
Aquí usamos que $\overline{S}(f)=\underline{S}(f)$ por ser $f$ integrable.
$\Leftarrow)$ Supongamos ahora que para todo $\epsilon$ se puede encontrar la partición $P_\epsilon$ que satisface $\overline{S}(f,P_\epsilon) \ – \ \underline{S}(f,P_\epsilon) < \epsilon$. Veremos que a partir de esto se puede probar que $ \overline{S}(f) = \underline{S}(f) .$
Por ser $\overline{S}(f)$ el ínfimo de todas las sumas superiores, se tiene que
Y $\epsilon$ es tan pequeño como lo queramos, por lo tanto.
$$ \overline{S}(f) = \underline{S}(f) .$$
$\square$
Ejemplos de integral definida con los resultados que probamos
Veamos algunos ejemplos de cómo utilizar los resultados que acabamos de mostrar para demostrar que ciertas integrales definidas existen, y para encontrar su valor.
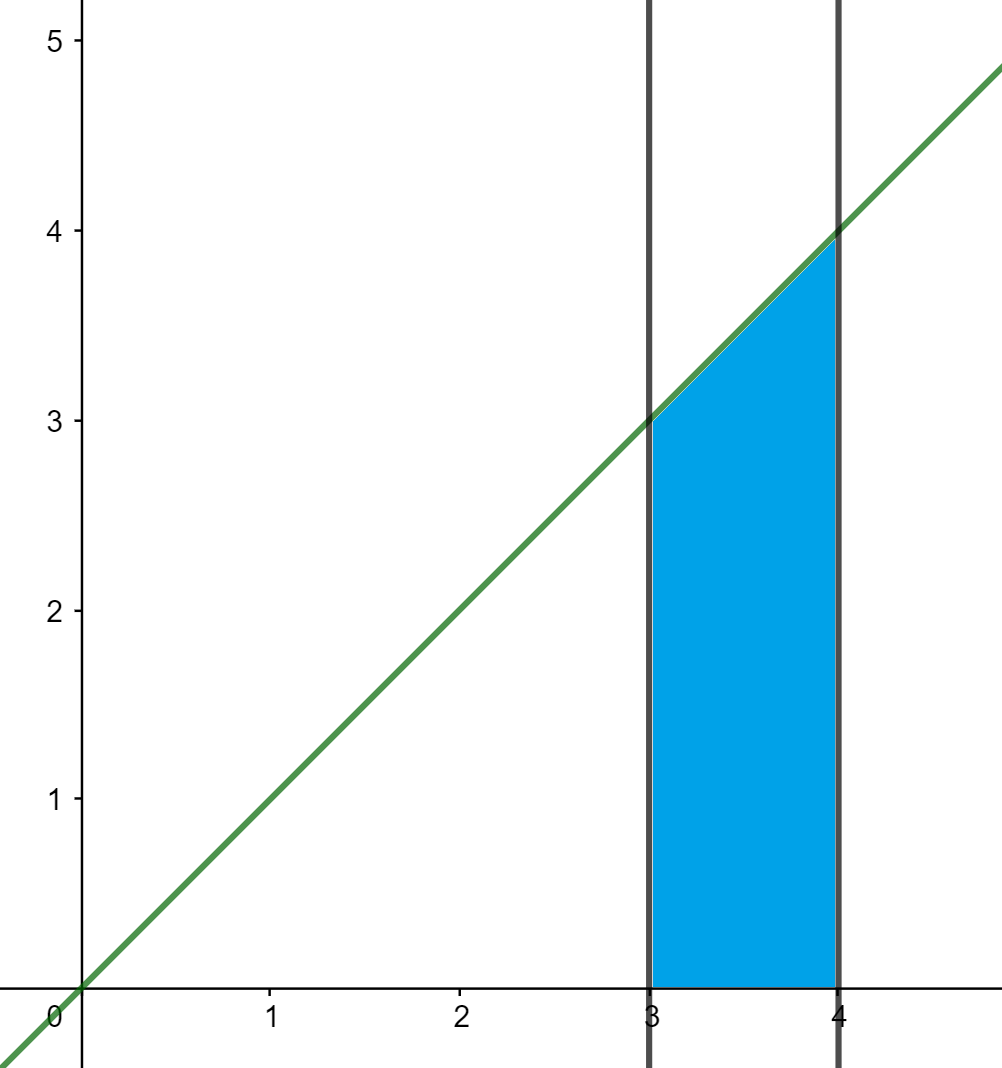
Ejemplo. Calculemos la integral de la función $f(x)=x$ en el intervalo $[3,4]$
Usaremos la técnica de los límites de las particiones homogéneas. Estudiaremos con detalle el caso de las sumas superiores y dejaremos el de las inferiores como ejercicio. Si la partición $P_n$ del intervalo $[a,b]$ es homogénea y en $n$ partes, las celdas tienen longitud $\frac{b-a}{n}$ y entonces son:
Así, por la proposición que mostarmos arriba, tenemos que la integral en el intervalo $[3,4]$ existe y por lo tanto:
$$ \int \limits_{3}^{4} x \, dx = \frac{7}{2}.$$
$\triangle$
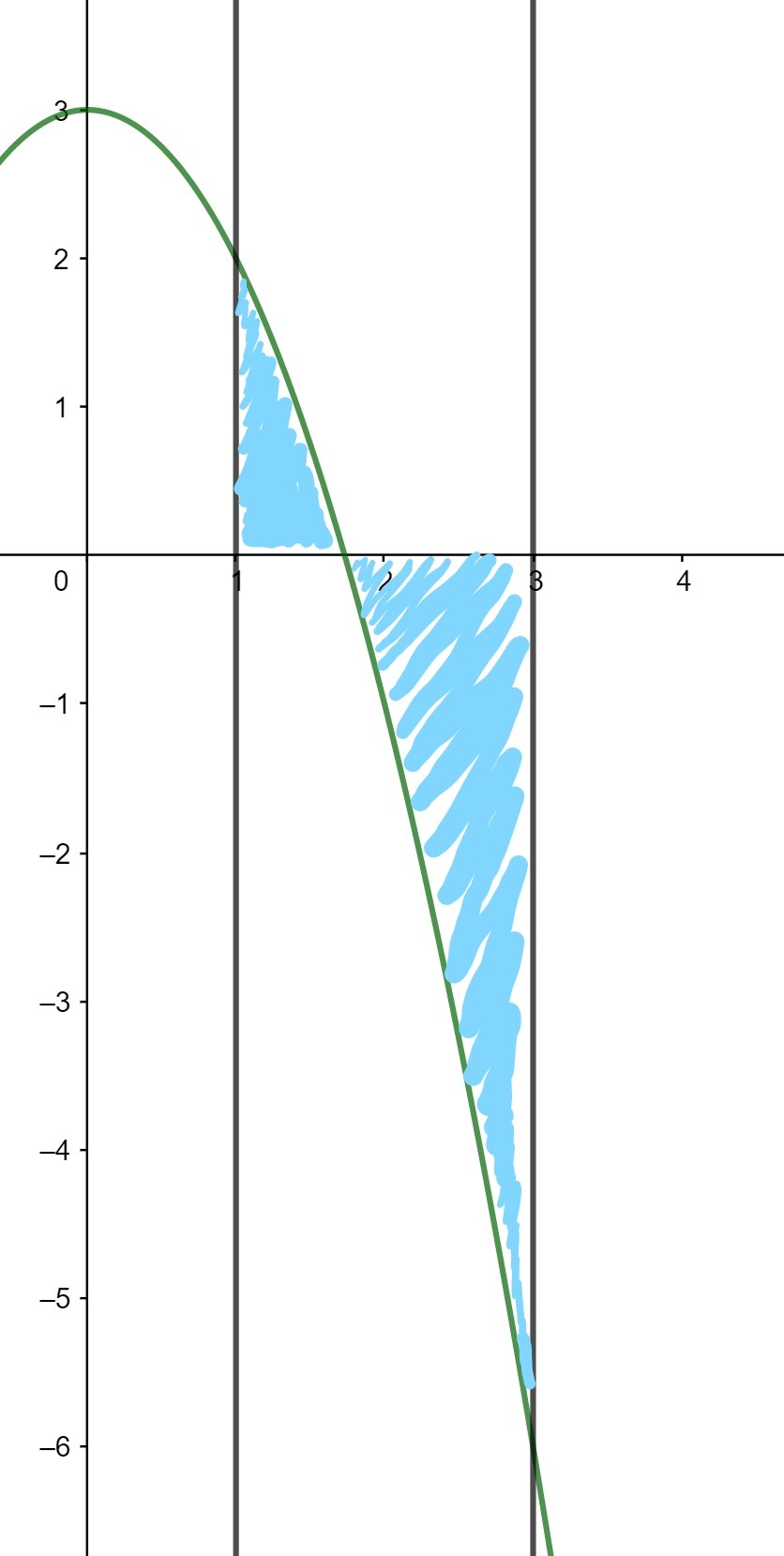
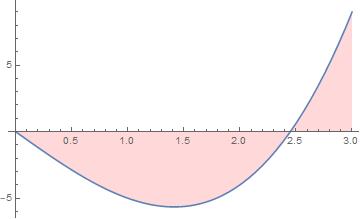
Ejemplo. Ahora calculemos la integral de la función $f(x)=-x^2 + 3$ en el intervalo $[1,3]$ . Al hacer una figura, obtenemos la siguiente gráfica.
Observa que en este caso tenemos 2 áreas: del eje $x$ y otra por debajo del eje $x$. Todo lo que hemos hecho funciona tanto para funciones positivas, como negativas. Pero obtendremos algo interesante de la conclusión de este problema.
Para ver que la integral existe, usaremos nuevamente la técnica de las particiones homogéneas. Ahora haremos las sumas inferiores. Como la función es decreciente, los valores más chicos aparecen al final de cada intervalo. Tenemos entonces que:
Se puede mostrar que el límite de las sumas superiores para las particiones homogéneas también es $-\frac{8}{3}$ (verifícalo), así que la integral buscada tiene este valor. De esta forma,
$$ \int \limits_{1}^{3} -x^2 +3 \, dx = – 8/3 .$$
$\triangle$
¿Áreas negativas?
Se comentó que la integral se utiliza para el cálculo de áreas bajo la curva, entonces, ¿Por qué el resultado del ejemplo anterior es negativo? ¿Hay áreas negativas? Intuitivamente, no debería haber áreas negativas. Sin embargo, el procedimiento que usamos para definir a la integral definida sí nos puede dar números negativos. Puedes pensarlo como sigue: el área que estamos calculando va del eje $x$ a la gráfica de la función $f$. Si esa gráfica está por debajo, entonces estámos yendo en dirección negativa. En el último ejemplo hay tanto una región por encima del eje $x$, como una por debajo. El número que nos salió es la diferencia de ambas áreas: el área por arriba del eje $x$, menos el área por debajo del eje $x$. Como el resultado que obtuvimos fue negativo, entonces el área por debajo del eje $x$ era mayor en magnitud.
Esta es una propiedad un poco antintuitiva, pero es importante preservarla. El cálculo de áreas es sólo una de las aplicaciones que tiene la integral. En otras aplicaciones, es importante que la integral mida qué tanto estuvimos por encima del eje $x$ y qué tanto estuvimos por debajo.
¿Y si queremos realmente entender la suma de las dos áreas de la figura y no la resta? En ese caso, tendremos que hacer una figura para entender cómo hacer las cuentas. Si hay área que está por debajo del eje $x$, deberemos agregar un signo $-$ para contarla correctamente como área positiva. Pero entonces tendremos que partir nuestro intervalo de integración en varios intervalos de acuerdo a cuándo la gráfica de $f$ cruza al eje $x$.
Con esto en mente, retomemos el ejemplo anterior.
Ejemplo. Encontremos el área en valor absoluto que genera la función $f(x)=-x^2 + 3$ en el intervalo $[1,3]$.
Lo primeo que haremos es obtener el punto donde la función cruza al eje $x$. Para ello, se requiere que $-x^2+3=0$, que en dicho intervalo sucede en $x=\sqrt{3}$.
Una vez encontrado el punto raíz o la raíz de la función, ahora podemos partir el área absoluta que nos interesa en dos intervalos: el $[1,\sqrt{3}]$ y el $[\sqrt{3},3]$.
Pensando en que queremos calcular el área absoluta, necesitamos dividir la formula que se planteó anteriormente en los intervalos correspondientes, y en el intervalo $[\sqrt{3},3]$ será necesario agregar un signo menos para que el área que se calcula como negativa, ahora se cuente de manera positiva. De esta manera, tendríamos:
Ahora queda replicar el proceso que vimos en la suma anterior con estos 2 nuevos intervalos y juntarlos considerando el cambio de signo. Desarrollando los cálculos, se encuentra que el área generada por la función es de:
$$F_1^ 3= 4 \sqrt 3 \ – \ \frac{8}{3}.$$
$\triangle$
Nota. En este ejemplo partimos el intervalo en dos subintervalos, pero el intervalo puede quedar partido tantas veces como la función $f$ lo requiera, de acuerdo a la cantidad de veces que se cruza el eje $x$.
Más adelante…
En esta entrada dimos la definición formal de que una función sea integrable en cierto intervalo. O mejor dicho, que sea Riemann integrable. En cursos más avanzados de matemáticas se definen y estudian otras nociones de integrabilidad, pero por ahora esta es la que nos interesa. Para que la integral de Riemann exista, necesitamos que coindidan el ínfimo de las sumas superiores y el supremo de las sumas inferiores de la función dada. En ese caso, el valor de la integral es ese valor en común.
Ya dada la definición, dimos algunos resultados que nos ayudarán a determinar cuándo una función es integrable. En siguientes entradas daremos más propiedades que nos ayudarán entender mejor la integrabilidad y la integral. Varias entradas despuésse hablará de las integrales indefinidas y del teorema fundamental del cálculo, que daran pie a numerosas técnicas de integración.
Lo último que hicimos en esta entrada es notar que hay casos en donde el valor de la integral que se encuentra es negativo. Esto contradice un poco nuestra intuición de que la integral es un área. Sin embargo, ya platicamos qué hacer en este caso si queremos realmente el «área positiva». Seguiremos explorando esta idea de integrales negativas un poco más adelante. Por ahora, lo que puedes hacer es identificar los intervalos en los que la función tiene determinado signo.
Tarea moral
Completa las cuentas que quedaron pendientes en cada uno de los ejercicios.
Expresa la siguiente expresión como una integral en el intervalo $[0,\pi]$. $$\lim_{n \rightarrow \infty} \sum_{i=1}^n (x_i^3 + x_i ~ sin (x_i)) \triangle x .$$
Encuentra el área delimitada por la curva $f(x)=x^2 +2 $ y el eje $x$ en el intervalo $[1,4]$.
4. Encuentra el valor del área delimitada por la gráfica de la función$f(x)= x^3-6x$ en el intervalo $[0,3]$, que es la zona sombreada. Realiza las cuentas tanto con áreas absolutas, tanto con áreas con signo.
5. Encuentra el área de la función $f(x)=\sqrt {1-x^2}$ en el intervalo $[0,1]$.
La principal motivación y aplicación de la integral es el cálculo de áreas. En esta entrada hablaremos de cómo aproximar áreas mediante sumas de Riemann. Para introducir este concepto, recordemos que en la entrada pasada se ilustró el método de exhaución. Vimos que es un acercamiento geométrico al cálculo del área del círculo mediante polígonos inscritos o circunscritos. Intuitivamente, conforme aumentamos el número de lados de estos polígonos, el área generada por ellos se aproximaba cada vez mejor al área del círculo.
Sin embargo, en las aplicaciones no sólo queremos calcular el área de círculos, sino de muchos tipos diferentes de figuras. Idealmente, nos gustaría poder calcular el área de muchas figuras u objetos, siempre y cuando éstos se puedan describir.
La forma de describirlos en este curso será mediante funciones. Por lo tanto, buscaremos encontrar una función cuya gráfica se parezca al contorno del objeto (o bien cuyo contorno pueda ser descrito por más de una función). Esta gráfica será una curva que define una región. Hablaremos de cómo definir el área de esta región de manera que coincida con nuestra intuición.
En esta entrada empezaremos con algunas definiciones generales e ideas de aproximación basadas en el método exhaustivo.
Área bajo la curva
El origen analítico de la integral se origina al asociar áreas con funciones.
Tomemos dos reales $a$ y $b$ con $a<b$. Tomemos una función $f:\mathbb{R}\to \mathbb{R}$ que, para fijar las ideas correctamente por ahora, supondremos que es positiva en todo el intervalo $[a,b]$. Supongamos que delimitamos una región en el plano cartesiano de la siguiente manera.
Por la izquierda con la línea vertical $x = a$.
Por la derecha con la línea vertical $x=b$.
Por abajo con el eje $x$.
Por arriba con la gráfica de cierta función $f(x)$.
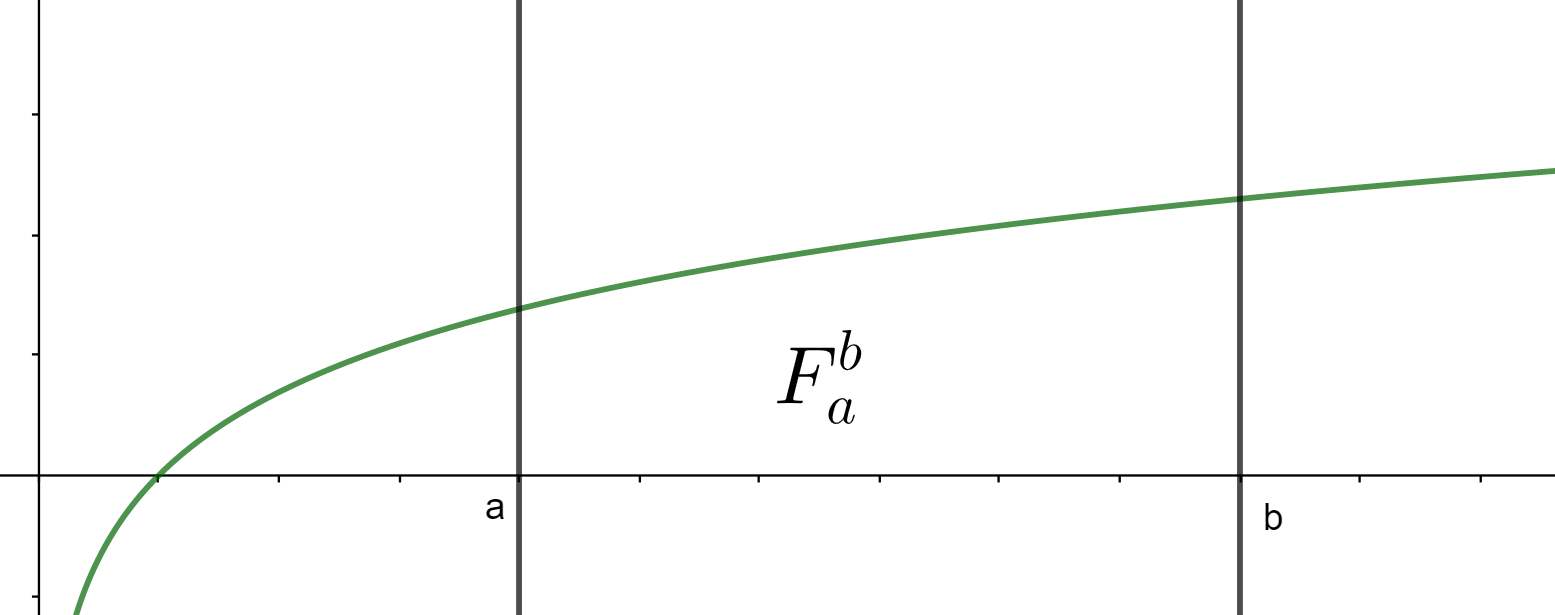
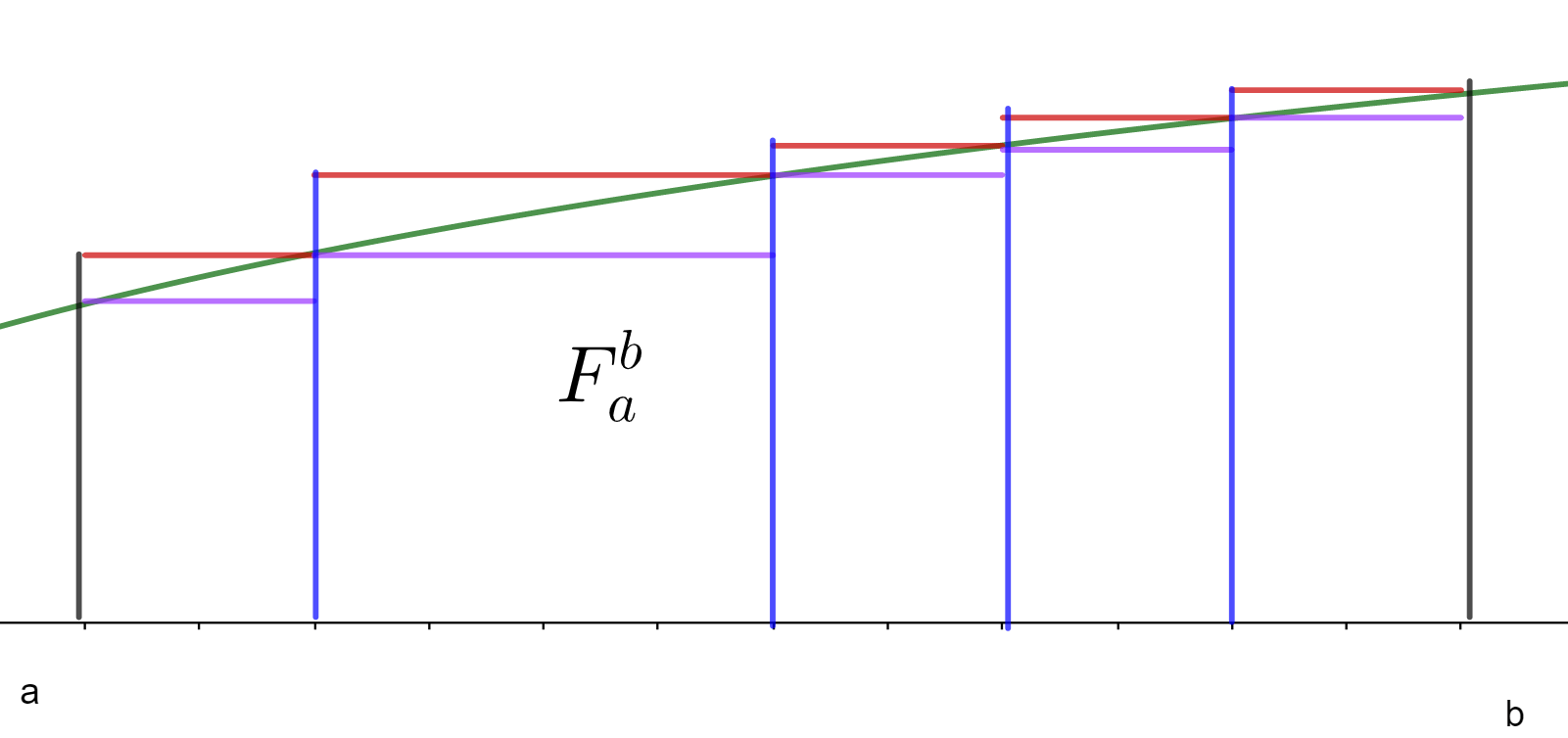
Entonces, la magnitud del espacio que se encuentra acotado por estas curvas se le conoce como el «área bajo la curva» o más específicamente, el «área bajo la curva de $f(x)$ en el intervalo $[a,b]$.» Usaremos la notación $F_a^b$ para referirnos a esta magnitud. En el transcurso de toda esta entrada supondremos que tenemos un ejemplo «bien portado» en el que sí tiene sentido hablar de dicha área $F_a^b$ (recuerda que las funciones pueden tener comportamientos muy raros). Será importante definir qué quiere decir exactamente «bien portado», pero eso lo haremos un poco más adelante.
Ejemplo. En la siguiente figura, la curva verde es la gráfica de la función $f(x)$. La región que nos interesa está bajo esta gráfica, entre las verticales en $a$ y $b$, y sobre el eje $x$. Su magnitud $F_{a}^b$ es el área bajo la curva que nos interesa.
$\triangle$
Particiones, celdas y rectángulos
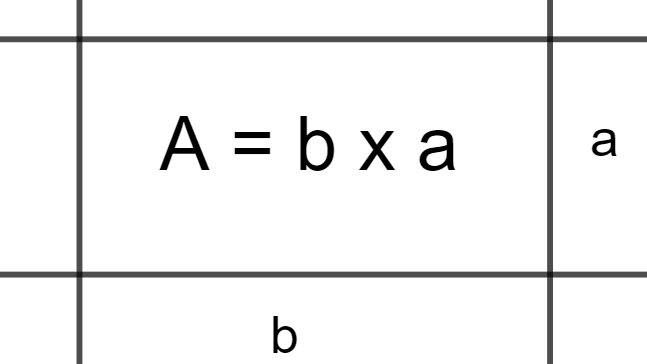
Una vez definida la región a la que se le va a calcular el área, buscaremos hacer una aproximación a esa área mediante la suma de áreas de rectángulos. Estos pueden ser inscritos (que quedan por dentro o por debajo de la función) o circunscritos (que quedan por afuera o por encima de la función). La razón por la cual usamos rectángulos es que son figuras cuya área se calcula de manera muy sencilla: el área $A$ es su base $b$ por su altura $a$.
Para definir los rectángulos que usaremos para aproximar el área, será necesario hacer una partición $P$ del intervalo $[a,b]$ del eje $x$ en una cierta cantidad de partes (que llamaremos celdas), no necesariamente todas ellas de la misma longitud. Estas partes serán las bases de los rectángulos que usaremos. Comencemos a formalizar estos conceptos.
Definición. Sean $a$ y $b$ números reales con $a\leq b$. Sea $f:\mathbb{R}\to \mathbb{R}$ una función. Sea $n\geq 0$ un entero. Una partición (en $n$ partes) del intervalo $[a,b]$ será una elección de números reales $x_0\leq x_1 \leq \ldots\leq x_n$ con $x_0=a$ y $x_n=b$. A cada subintervalo de la forma $[x_{i-1},x_i]$ para $1\leq i\leq n$ le llamaremos una celda de la partición.
A una partición la escribiremos usualmente poniendo sus elementos en orden, de la siguiente manera:
Definición. Dada la celda $[x_{i-1},x_i]$ para $1\leq i\leq n$ de una partición, su longitud será $x_i-x_{i-1}$ y la denotaremos por $\Delta x_i$. Así,
Definición. Si las celdas de una partición tienen todas la misma longitud, diremos que es una partición homogénea. Si no, es decir, si hay celdas de longitudes distintas, diremos que es una partición no homogénea.
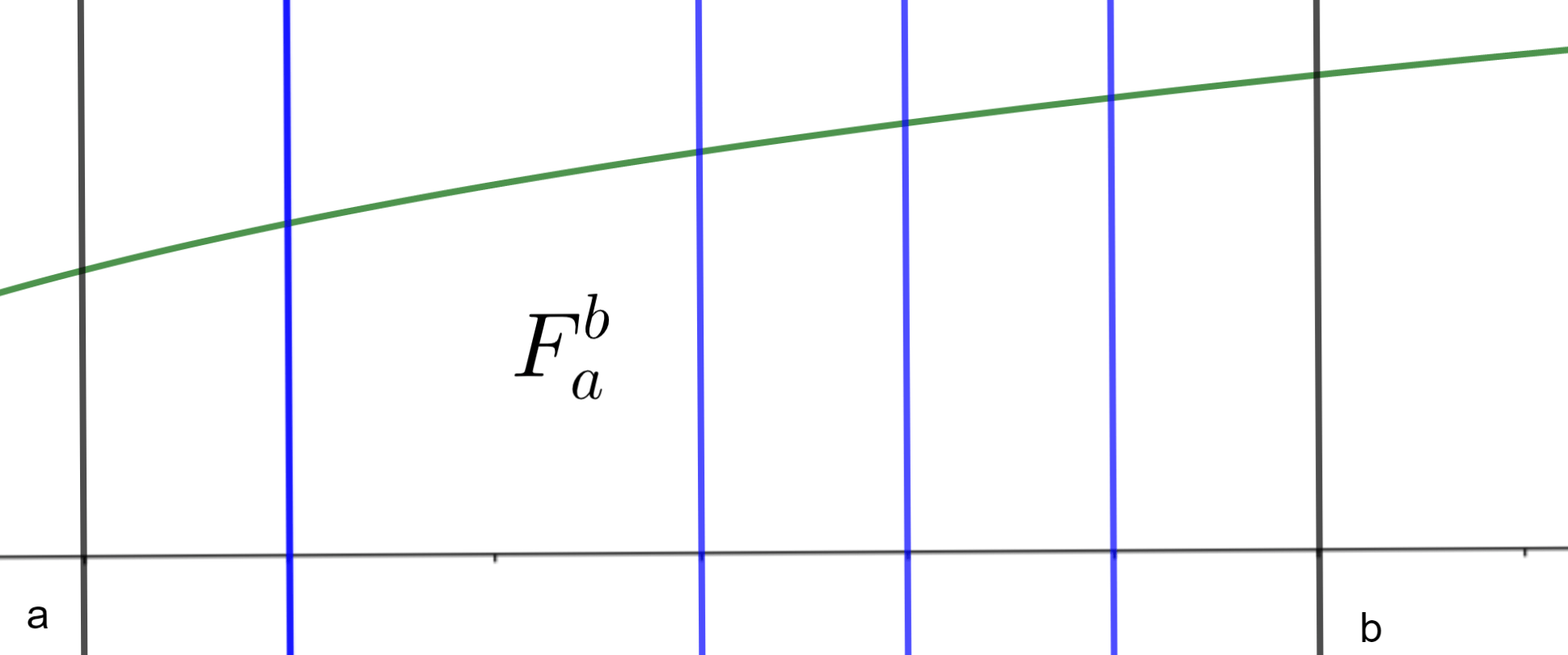
Al tomar una partición del intervalo $[a,b]$, podemos dibujar líneas verticales en cada punto de la partición. El área $F_a^b$ que nos interesa queda dividida en regiones o franjas como en la siguiente figura.
La función es en verde, la partición está en azul.
Intuición de las sumas superiores e inferiores
El área de cada una de las franjas que hicimos la podemos aproximar (al estilo del método exhaustivo) mediante rectángulos. Sin embargo, dado que la gráfica de la función no es exactamente horizontal, la suma de ciertos rectángulos que usemos para aproximar el área podría no ser exactamente el área bajo la curva. ¿Qué podríamos hacer para tener un poco más de control sobre cómo es el área de cada rectángulo con respecto al área de cada franja? Podemos usar como base las longitudes de las celdas y como altura podemos usar el máximo o mínimo de la función $f(x)$ en cada intervalo. Esto es un caso particular de lo que más adelante llamaremos sumas de Riemann.
La siguiente figura muestra rectángulos desde el eje $x$ hasta la altura morada (que es el mínimo de la función en cada celda) y rectángulos desde el eje $x$ hasta la altura roja (que es el máximo de la función en cada celda).
Cuando tomamos los mínimos en cada celda y consideramos el área de los rectángulos morados, la suma de cada rectángulo será menor que cada franja, y por lo tanto la suma total de áreas de estos rectángulos será menor que el área bajo la curva que queremos.
Por otro lado, si tomamos los máximos de cada celda, tenemos los rectángulos rojos, que análogamente a lo dicho arriba, tienen suma de área total mayor al área bajo la curva buscada. Intuitivamente, hemos acotado el área buscada entre dos áreas que sí sabemos calcular.
Formalización de sumas superiores e inferiores
Introduciremos un poco de notación para hablar de sumas superiores e inferiores. Primero, le queremos dar un símbolo al ínfimo y al supremo de las evaluaciones de la función que nos interesa en cada celda.
Definición. Dada una partición $P=\{x_0,\ldots,x_n\}$ del intervalo $[a,b]$ y una función acotada $f:\mathbb{R}\to \mathbb{R}$:
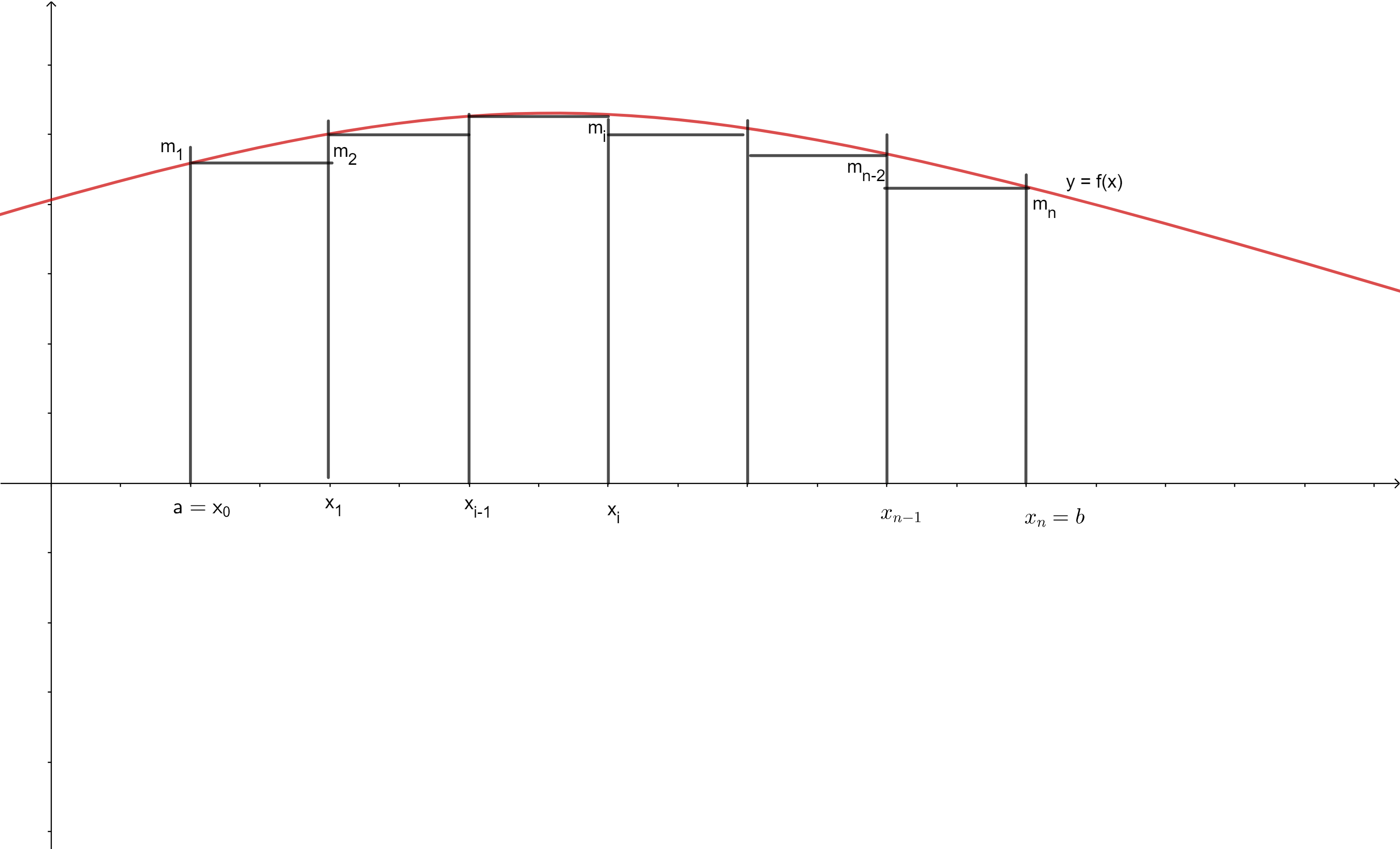
Al ínfimo de los valores de $f$ en la parte $[x_{i-1},x_i]$ le llamaremos $m_i$. En símbolos: $$m_i = \inf \lbrace {f(x) | x_{i-1} \leq x \leq x_i} \rbrace, \quad i = 1,…,n .$$
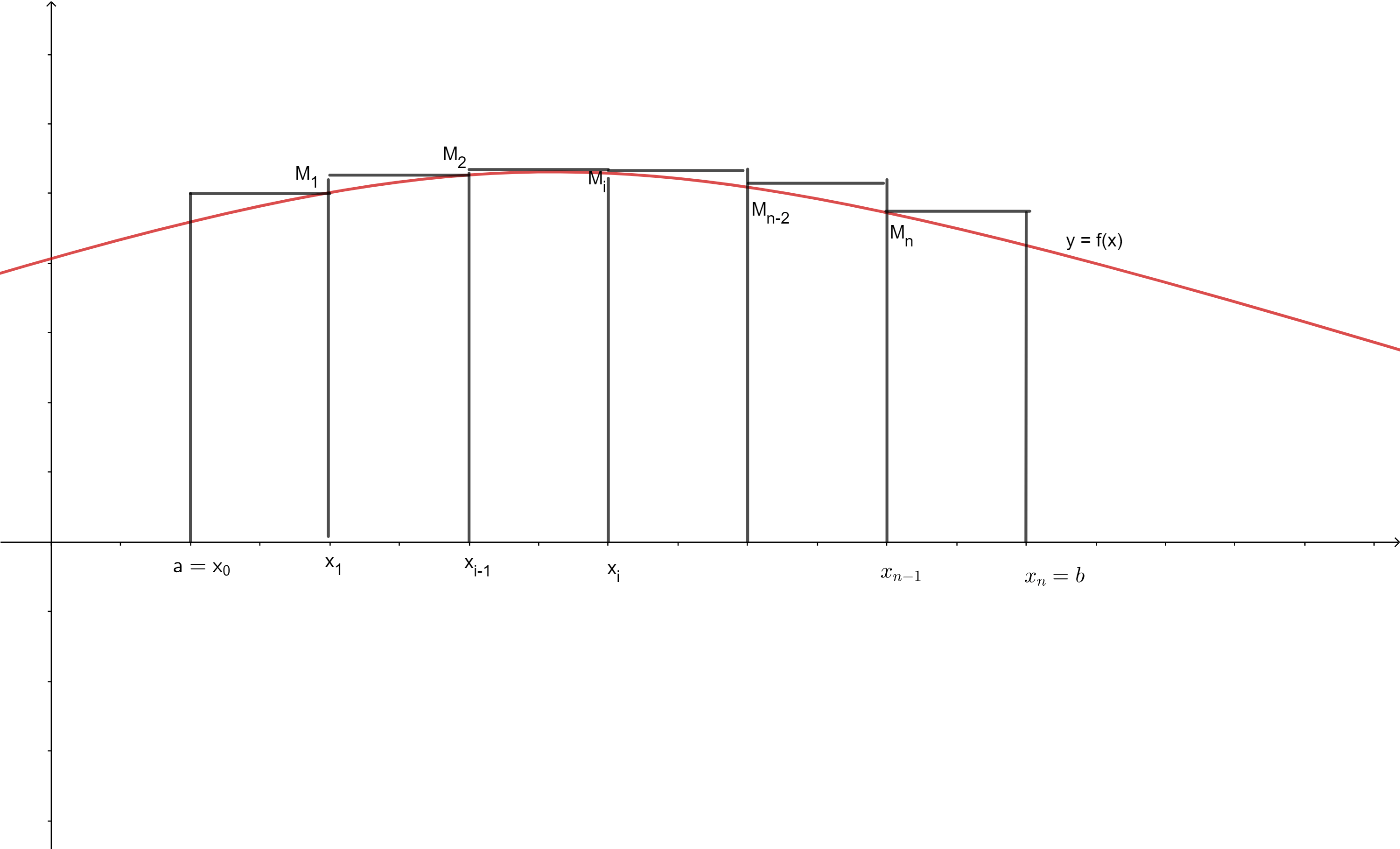
Al supremo de los valores de $f$ en la parte $[x_{i-1},x_i]$ le llamaremos $M_i$. En símbolos: $$M_i = \sup \lbrace {f(x) | x_{i-1} \leq x \leq x_i} \rbrace, \quad i = 1,…,n .$$
Te recomendamos recordar la teoría de ínfimos y supremos de Cálculo I, que puedes consultar en el siguiente enlace: Supremo e ínfimo. Como nota, observa que en este punto estamos suponiendo muy poco de $f$, simplemente que es acotada.
La siguiente definición formaliza la idea de «aproximar el área por abajo».
Definición. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Sea $P=\{x_0,\ldots,x_n\}$ una partición de $[a,b]$. Diremos que la suma inferior $\underline{S}$ correspondiente a la función $f$ en la partición $P$ del intervalo $[a,b]$ es el número:
donde $m_i$ es el ínfimo de los valores de $f$ la celda $[x_{i-1},x_i]$ y $\Delta x_i $ es la longitud de dicha celda. La expresión anterior se desarrolla explícitamente entonces como
Esto es precisamente la suma de áreas de varios rectángulos que, por tomar la altura como el ínfimo en cada celda, quedan todos ellos por debajo de la gráfica de la función, como en la siguiente figura.
Suma Inferior.
La siguiente definición formaliza la idea de «aproximar el área por arriba».
Definición. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Sea $P=\{x_0,\ldots,x_n\}$ una partición de $[a,b]$. Diremos que la suma superior $\overline{S}$ correspondiente a la función $f$ en la partición $P$ del intervalo $[a,b]$ es el número:
donde $M_i$ es el supremo de los valores de $f$ la celda $[x_{i-1},x_i]$ y $\Delta x_i $ es la longitud de dicha celda. La expresión anterior se desarrolla explícitamente entonces como
Ahora tenemos la suma de áreas de varios rectángulos que quedan por encima de la gráfica de la función, como se muestra a continuación:
Suma Superior.
Si regresamos a pensar que la función $f$ es «bien portada» como para que el área $F_a^b$ tenga sentido, entonces las sumas superiores e inferiores nos ayudan a acotar dicha área. En efecto, notemos que para cualquier $i=1,\ldots,n$, tenemos que
Es decir, la suma inferior es menor o igual que el valor de la integral y la suma superior es mayor o igual que la integral. Un poco más adelante formalizaremos esto, cuándo hablemos apropiadamente de las funciones «bien portadas».
Refinamientos de una partición
Si hacemos una partición con más puntos, habrá más celdas dentro del intervalo y por lo tanto, la cantidad de rectángulos aumenta. Intuitivamente, nuestras aproximaciones deberían acercarse más al área buscada. En efecto, más adelante veremos que esto es así. Por ello, es importante introducir la siguiente definición formal.
Definición. Sea $P$ una partición del intervalo $[a,b]$. Un refinamiento de $P$ es otra partición $Q$ de $[a,b]$ tal que $P \subseteq Q$.
Al momento de pedir que la partición $P$ esté contenida en $Q$, aseguramos que todos los puntos de la partición generados en $P$ se encuentran en $Q$, y por lo tanto que cada celdas de $Q$ sean subconjunto de alguna celda de $P$.
Intuitivamente, las aproximaciones que hagamos con la partición $Q$ deben de ser entonces mejores que las que hagamos con la partición $P$. Si cierta suma de áreas de rectángulos hechas con $Q$ es $S_Q$ y esa suma de áres hechas con $P$ es $S_P$ suena razonable que:
Sin embargo, nos estamos adelantando un poco. Lo que sí podemos mostrar formalmente por ahora es el siguiente resultado auxiliar.
Lema. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Si $P$ y $Q$ son particiones de $[a,b]$ y $Q$ es refinamiento de $P$, entonces $$\underline{S} (f,P) \leq \underline{S} (f,Q) \quad \text{y} \quad \overline{S} (f,Q) \leq \overline{S} (f,P)$$
Demostración. Por definición, $P$ y $Q$ son subconjuntos finitos de $[a,b]$, y $P\subseteq Q$, así que se puede llegar de $P$ a $Q$ agregando elementos de $[a,b]$ uno por uno. Bastará entonces ver que las desigualdades de arriba se cumplen cuando $Q$ tiene exactamente un elemento más que $P$, digamos $Q=P\cup \{y\}$. Tomemos $P=\{x_0,\ldots,x_n\}$. El real $y$ cae dentro de alguna celda de $P$, digamos en la celda $[x_{j-1},x_j]$.
Estudiemos qué suecede con las sumas inferiores. La suma inferior con respecto a $P$ es \begin{align*} \underline{S}_P &= \sum_{i=1}^{n} m_i\Delta x_i, \end{align*}
Para la suma inferior con respecto a $Q$, la celda $[x_{j-1},x_j]$ queda partida en dos celdas $[x_{j-1},y]$ y $[y,x_j]$. Los ínfimos respectivos $r$ y $s$ de la función $f$ en estas dos celdas cumplen $r\geq m_j$ y $s\geq m_j$, pues estamos tomando el ínfimo sobre conjuntos más chicos. Así, la suma inferior con respecto a $Q$ cumple:
Esto termina la demostración para las sumas inferiores. El caso de las sumas superiores es análogo.
$\square$
En palabras, el lema anterior dice que la suma inferior con la partición $P$ es menor que la suma inferior con la partición $Q$ y la suma superior con la partición $P$ es mayor que la suma superior con la partición $Q$.
Otra aplicación muy importante de los refinamientos es que nos ayudan a demostrar que cualquier suma superior siempre es mayor que cualquier suma inferior, sin importar la partición que tomemos en una y en otra.
Proposición. Sean $f:\mathbb{R}\to \mathbb{R}$ una funcion acotada y $a\leq b$ reales. Sean $P$ y $Q$ particiones de $[a,b]$. Entonces,
$$\underline{S}(f,P) \leq \overline{S}(f,Q).$$
La idea de la demostración es sencilla. Para cualesquiera dos particiones $P$ y $Q$ podemos encontrar una partición $R$ que es un refinamiento de ambas (¿cómo la encontrarías?). Ya teniendo dicha partición, tenemos la cadena de desigualdades:
Dar la partición $R$ de manera explícita y los detalles de cómo justificar la cadena de desigualdades anterior queda como parte de los ejercicios de esta entrada.
Sumas de Riemann y regla del punto medio
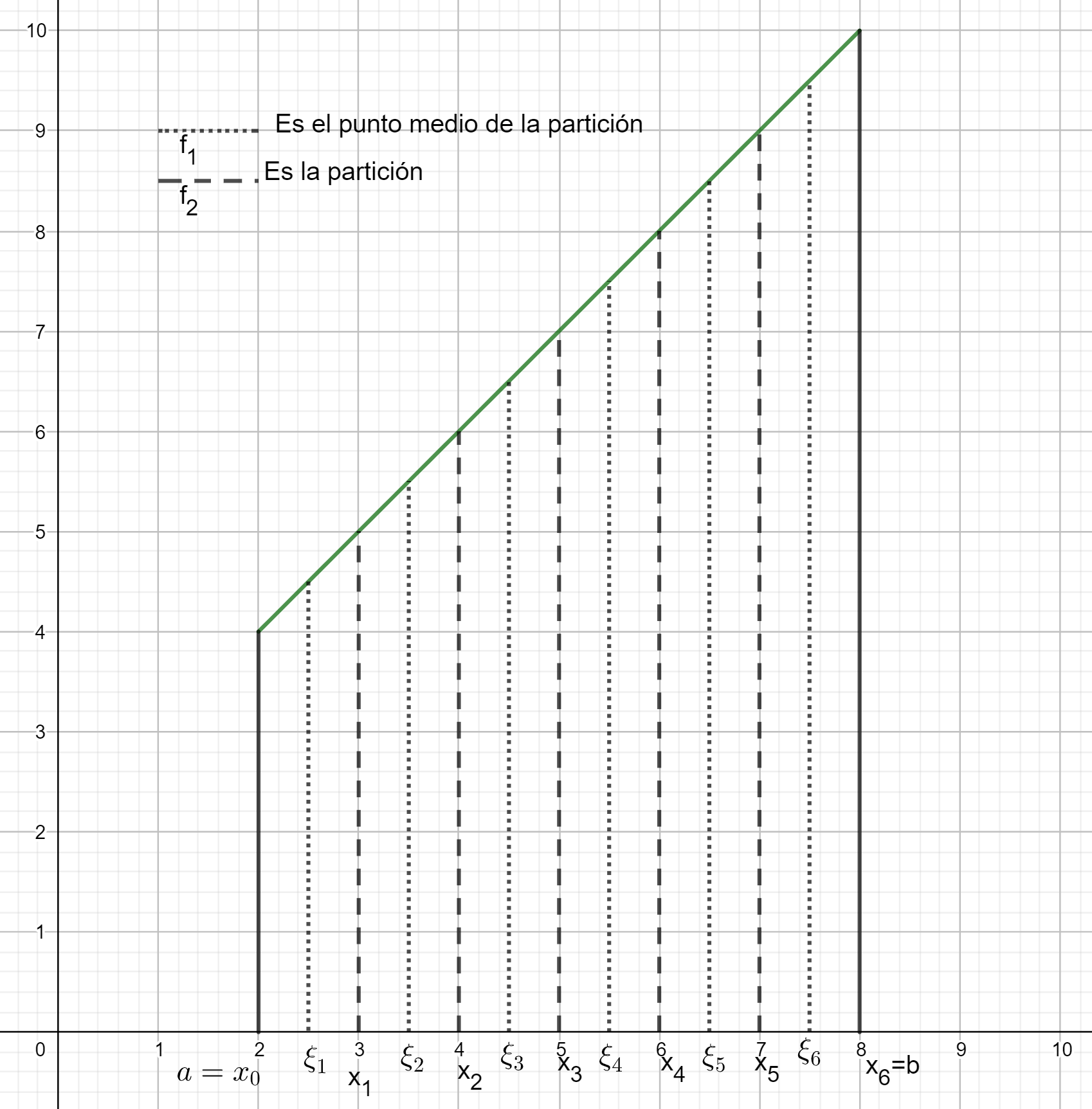
Ya vimos cómo hacer aproximaciones con rectángulos inferiores y cómo hacer aproximaciones con rectángulos superiores. Pero, como te imaginarás, los rectángulos podríamos tomarlos bajo otro criterio. Por ejemplo, podemos hacer rectángulos tomando un punto cualquiera $\xi_i$ dentro de cada celda $[x_{i-1},x_i]$ de una partición.
Ahora la aproximación quedaría de la siguiente manera:
A las expresiones de este estilo se les conoce como sumas de Riemann.
Una manera de dar de manera explícita algunos valores $\xi_i$ es tomando los puntos medios en cada celda, como en la siguiente figura.
Este método nos dará otra manera de aproximar el área que buscamos. Si de nuevo refinamos la partición y usamos los puntos medios, tendremos otro procedimiento exhaustivo para aproximar el área. Pero igual podríamos tomar otra, y otra, y otra manera de aproximar el área. ¿Será que todas estas aproximaciones nos llevan a la misma área? Es parte de lo que tendremos que entender formalmente más adelante. Sin embargo, por ahora haremos algunos ejemplos concretos de las ideas que hemos discutido hasta ahora.
Ejemplo de sumas de Riemann superiores, inferiores y de punto medio
Ejemplo. Tomamos la función $f:[2,8]\to \mathbb{R}$ dada por $f(x)=x+2$. Tomemos la partición homogénea $P=\{2,3,4,5,6,7,8\}$, en donde cada celda tiene longitud $1$. Encontremos la suma superior, la inferior y la que se obtiene mediante la regla del punto medio.
Partición con n=6
Para la suma inferior, tenemos el siguiente conjunto de ínfimos (en este caso, mínimos) de las celdas generadas:
En esta entrada empezamos a motivar cómo el área bajo una curva puede ser aproximada mediante rectángulos. Sin embargo, supusimos que nuestra curva estaba dada por una función «bien portada» la cuál sí hace un área apropiada. Esto no necesariamente pasará siempre, pues si la función tiene una gráfica muy complicada, entonces no podremos hablar apropiadamente del área debajo de ella.
De hecho, lo que hicimos en esta entrada nos ayudará a dar formalidad a exactamente qué quiere decir que la función sea «bien portada». La idea de particiones nos servirá para definir el área justo cuando cualquier proceso de aproximar «suficientemente bien» nos lleve al mismo límite. Tomaremos entonces la intuición desarrollada de las sumas inferiores, superiores e incluso las de la regla del punto medio, para introducir la definición de integral definida de la siguiente entrada.
Tarea moral
Aproxima el área bajo la curva de las siguientes funciones en el intervalo dado, usando una partición homogénea con cinco celdas en el intervalo dado. En cada caso, realiza la cuenta con las sumas inferiores, las sumas superiores y con la regla del punto medio.
$f(x) = x^2$ en el intervalo $[0,1]$.
$f(x)=2x-3$ en el intervalo $[0,2]$.
$f(x)=x e^x$ en el intervalo $[2,3]$ (puedes usar calculadora para aproximar las respuestas)
En esta entrada sólo hemos hablado de cómo encontrar el área entre la gráfica de una función positiva y el eje $x$ (dados dos límites verticales). ¿Qué tendríamos que hacer si la función es negativa?
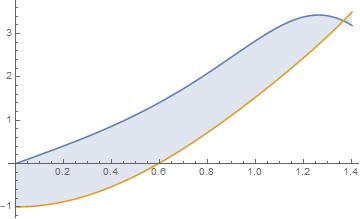
Ahora imaginemos que queremos encontrar el área que se encuentra entre la gráfica de dos funciones. Por ejemplo, imagina que queremos aproximar con las ideas de esta entrada el área entre las gráficas de las siguientes dos funciones, desde la línea vertical $x=0$ hasta el primer punto de intersección que tienen.
$f(x)= sin(x^3) + 2x$
$g(x)=cos(x^2)+3x^2-2$
Puedes ver estas funciones en la figura. Para realizar la aproximación, haz lo siguiente.
Encuntra el punto $c$ tal que $f(c)=g(c)$, es decir, en qué ubicación horizontal se cruzan las gráficas.
Haz una partición homogénea en 10 partes del intervalo $[0,c]$. ¿Qué longitud tiene cada celda?
Crea rectángulos usando como altura la distancia máxima entre las curvas en cada celda. ¿Cuánto queda la suma de áreas de rectángulos? ¿Y si usas la distancia mínima entre las curvas en cada celda?
En el texto se da la demostración de que en un refinamiento, la suma inferior se vuelve más grande. Completa los detalles para ver el resultado análogo de que en un refinamiento la suma superior se vuelve más pequeña. ¿Qué propiedades del supremo estás utilizando?
Completa los detalles de la proposición de que cualquier suma superior es mayor a cualquier suma inferior, aunque estemos hablando de particiones diferentes.
La gráfica de la función $f(x)=\sqrt{1-x^2}$ es un semicírculo que va de $-1$ a $1$. Usa una partición homogénea en $10$ celdas del intervalo $[-1,1]$ y la regla del punto medio para dar una aproximación al área de este semicírculo. Entonces, ¿cuál sería una aproximación al área del círculo de radio $1$? De aquí, ¿cuál sería una aproximación para $\pi$?
En las secciones anteriores vimos como calcular tanto el volumen como el área de un sólido de revolución, en esta entrada veremos un teorema en el que podemos calcular áreas y volúmenes de sólidos de revolución con sus respectivos centroides, es decir, su centro de simetría, a este teorema se le conoce como teorema del centroide de Pappus que se divide a su vez en dos teoremas y aunque no es una aplicación directa de las integrales, podemos calcular el volumen o el área de estos sólidos de una manera más sencilla, veamos el primer teorema.
Teorema de Pappus (Volúmenes)
El volumen $V$ de un sólido de revolución generado mediante la rotación de una curva plana $C$ alrededor de un eje externo, de manera que, esta última no corte el interior de la región, es igual al producto del área $A$ por la distancia $2\pi d$ recorrida por su centroide en una rotación completa alrededor del eje:
$$V=2\pi A d$$
Demostración:
Sea un área $A$ generada mediante la rotación de una curva plana $C$ alrededor del eje $x$, consideremos un elemento $dA$ de dicha área, el volumen $dV$ generado por el elemento $dA$ es igual a:
$$dV=2 \pi ydA$$
Donde $y$ es la distancia entre el eje $x$ y el elemento $dA$, por tanto:
$$V=\int 2 \pi y dA=2 \pi \bar{y} A$$
Con $\bar{y}=d$ y $2\pi \bar{y}$ es la distancia recorrida por el centroide de $A$.
$\square$
Teorema 2 de Pappus (Áreas)
El área $A$ de una superficie de revolución generada mediante la rotación de una curva plana $C$ alrededor de un eje externo, es igual a su longitud $L$, multiplicada por la distancia $2\pi d$ recorrida por su centroide en una rotación completa alrededor del eje, entonces:
$$A=2\pi L d$$
Demostración:
Sea $L$ la longitud de una curva plana $C$ que rota alrededor del eje $x$ y consideremos un elemento $dL$ de dicha longitud. El área $dA$ generada por el elemento $dL$ es igual a:
$$dA= 2 \pi y dL$$
Donde $y$ es la distancia del elemento $dL$ al eje $x$, por tanto:
$$A=\int 2 \pi y dL=2 \pi \bar{y} L$$
Con $\bar{y}=d$ y $2\pi \bar{y}$ es la distancia recorrida por el centroide $L$.
$\square$
Veamos unos ejemplos de como aplicar el teorema de Pappus-Guldinus.
Ejemplos
Un toroide se forma al hacer girar un círculo de radio $r$ respecto a una recta en el plano del círculo que es la distancia $R>r$ desde el centro del círculo. Encuentre el volumen del toroide.
El círculo tiene área $A=\pi r^{2}$, por simetría su centroide es su centro, por tanto, la distancia recorrida por el centroide durante una rotación está dada como $d=2\pi R$.
Por el teorema de Pappus (volumen), el volumen del toroide es:
$$V=Ad=(\pi r^{2})(2\pi R)=2\pi ^{2}r^{2}R$$
Calcule el área de la superficie del toro del ejercicio anterior.
Del segundo teorema de Pappus (Área) tenemos que:
$$A=2\pi L d=2 \pi (r)(2\pi R)=4\pi ^{2} rR$$
Calcula el área de la superficie generada por una circunferencia cuyo radio es de $3m$, girando $2\pi$ alrededor de una recta tangente.
Tenemos que la longitud es $L=2 \pi (3)=6 \pi$
Por el segundo teorema de Pappus calculamos el área de la superficie como:
$$A=2 \pi L d=2 \pi (6 \pi) (3)=36 \pi ^{2}$$
Calcula el centroide de un alambre semicircular de radio $R$, que gira alrededor del eje $x$.
Para calcular el centroide podemos utilizar cualquiera de los dos teoremas de Pappus, en este caso, es fácil calcular el centroide por el teorema de Pappus de áreas, veamos:
Calcule el volumen del sólido generado por un cuadrado de lado $a=3$ que gira alrededor del eje $y$.
Sabemos que el área lo calculamos como:
$$A=a^{2}=3^{2}=9$$
Sabemos que el centroide de un cuadrado está justo en el centro, o a la mitad de cada cara, por lo que:
$$\bar{y}=1.5$$
Así, calculando el volumen por el teorema de Pappus para volúmenes, tenemos que:
$$V=2\pi A \bar{y}=2\pi (9)(1.5)=27 \pi$$
Tarea moral
Los siguientes ejercicios no son para evaluación, pero son ejercicios para que practiques lo aprendido que te ayudaran en el desarrollo del entendimiento del tema, por lo que te invitamos a resolver los siguientes ejercicios propuestos relacionados con el tema visto.
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Hallar el volumen y el área de la superficie de un solido de una esfera de radio r.
Hallar el volumen de un solido de un cono con altura h y radio r.
Calcule el volumen del solido obtenido al hacer girar el triangulo con vértices $(2, 3)$, $(2, 5)$ y $(5, 4)$ respecto al eje x.
La región cuadrada con vértices $(0, 2)$, $(2, 0)$, $(4, 2)$ y $(2, 4)$ se hace girar alrededor del eje $x$ para generar un solido. Determine el volumen y el área de la superficie del sólido.
Localice el centroide de una región semicircular entre la semicircunferencia $y=\sqrt{a^{2}-x^{2}}$ y el eje x.
Más adelante…
Vimos en esta sección el teorema de Pappus con el que se puede calcular el volumen, centroide y el área de un solio de revolución, en la siguiente sección veremos una aplicación más de la integral, en este caso, en el área de la física, que es cálculo de momentos y centros de masa.
En la entrada anterior definimos qué es una elipse, hablamos de una técnica para trazar una y cómo esta técnica, nos conduce naturalmente a su definición analítica: una elipse es la curva que define al conjunto de puntos que cumplen que la suma a dos puntos distintos llamados focos es constante. Finalmente vimos cómo escribir la ecuación canónica de la elipse; a partir de esta ecuación canónica podemos leer toda su información geométrica.
Ahora, para finalizar nuestro estudio de las elipses, vamos a hablar de sus elementos, propiedades focales y sus propiedades métricas. Verás cómo algunos problemas de aplicación motivan el estudio formal de estas propiedades y extenderemos algunas de ellas para el estudio de las cónicas que nos faltan. Sin más preámbulo, abordaremos el tema.
Elementos de una elipse
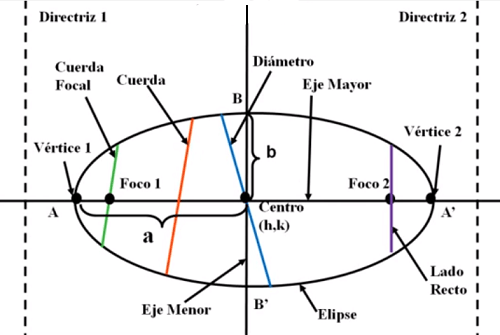
En la entrada anterior hicimos mención a algunos de los elementos que componen una elipse. Como mencionamos, a partir de la ecuación canónica puedes leer directamente información como el eje menor y el eje mayor; conociendo estos dos ejes, puedes deducir cuáles son sus vértices y sus focos. Haciendo más cuentas puedes deducir cuál es su lado recto y directrices.
En la siguiente figura puedes observar un diagrama que muestra todos los elementos de la elipse y en la siguiente tabla puedes ver qué relación guardan unos con otros. Es importante que sepamos extraer toda la información geométrica que nos sea posible cuando se nos presente una ecuación en su forma canónica.
Breve resumen de los elementos de una elipse. Estos elementos tienen análogos cuando tratamos con otras secciones cónicas.
Como puedes notar, la última fila se refiere a una propiedad de la elipse que no hemos discutido: la excentricidad. La excentricidad normalmente denotada como $\epsilon$ es un parámetro que determina el grado de desviación de una sección cónica con respecto a una circunferencia. Pronto veremos que a partir de la excentricidad, podemos definir a las tres secciones cónicas como el lugar geométrico de los puntos $\mathbf{X}$ cuya razón de sus distancias a un foco $\mathbf{p}$ y a una recta $\ell$ es una constante fija. Profundizaremos en el estudio de la excentricidad a lo largo de esta unidad, por el momento fijemos la idea de que las elipses necesariamente deben tener una excentricidad menor que uno; es decir $\epsilon < 1$.
Otra observación importante: estas reglas se refieren a una elipse centrada en el origen que tiene una ecuación canónica $\frac{x^{2}}{a^{2}}+\frac{y^{2}}{b^{2}}=1$. No es el objetivo de esta unidad hablar de traslaciones y rotaciones; pero debes saber que si la elipse tiene el centro fuera del origen en un punto $(h,k)$, su ecuación se ve así: $\frac{x^{2}-h}{a^{2}}+\frac{y^{2}-k}{b^{2}}=1$. El estudio de elipses rotadas se aborda comúnmente en un segundo curso de geometría analítica.
Propiedad focal de la elipse
La propiedad focal de la elipse es es que cualquier fotón que sale de uno de los focos, se refleja dentro de la elipse para llegar al otro foco. Si no estás familiarizado con el fotón, imagina la siguiente situación: estás en un cuarto con paredes reflejantes y con forma elíptica; si tu te paras en uno de los focos del cuarto y apuntas con una linterna hacia algún punto en las paredes, el rayo de luz de tu linterna impactará directamente en el otro foco.
Existen dos formas de formalizar la propiedad que describimos en el párrafo anterior; la primera consiste en tomar el círculo de radio $2\mathbf{a}$ centrado en el foco $\mathbf{p}$ (este círculo contiene el otro foco $\mathbf{q}$, puesto que ahora $2 a>d(p, q)$) y luego ver que para los puntos de este círculo, su mediatriz con $\mathbf{q}$ es tangente a la elipse $\mathcal{E}$. La segunda forma de resolver este problema nos va a permitir abordar el clásico «problema del bombero», entonces dejaremos el primero como tarea moral.
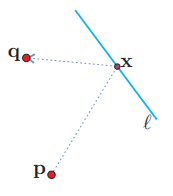
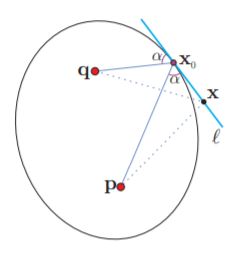
Para hablar del problema del bombero observa la siguiente figura, supongamos que un bombero está para en el punto $\mathbf{p}$ y hay un incendio en el punto $\mathbf{q}$. Pero tiene su cubeta vacía, y entonces tiene que pasar primero a llenarla a un río cuyo borde es la recta $\mathcal{l}$. El problema consiste en saber cuál es la trayectoria óptima que debe seguir el bombero. Es decir, ¿para cuál punto $x \in \mathcal{l}$? se tiene que $\mathrm{d}(\mathbf{p}, \boldsymbol{x})+\mathrm{d}(\boldsymbol{x}, \mathbf{q})$ es mínima.
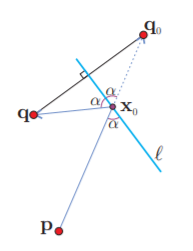
Nota cómo no hemos específicado de qué lado del río está el fuego; si estuviera del otro lado que el bombero, cualquier trayectoria al fuego tiene que pasar por $\mathcal{l}$ y entonces debe irse por la línea recta de $\mathbf{p}$ a $\mathbf{q}$ y tomar agua en $\boldsymbol{x}_{0}=\ell \cap \overline{\mathbf{p q}}$ (ver la siguiente figura). Entonces, si fuego y bombero están del mismo lado del río $\mathcal{l}$ podemos pensar en un «fuego virtual», que es el reflejado de $\mathbf{q}$ en $\mathcal{l}$, llamémosle $\mathbf{q}_{0}$, que cumple que $\mathrm{d}(\mathbf{x}, \mathbf{q})=\mathrm{d}\left(\mathbf{x}, \mathbf{q}_{0}\right)$ para todo $\mathbf{x} \in \mathcal{l}$, (para $\mathbf{q}$ y $\mathbf{q}_{0}$, \mathcal{l} es su mediatriz). La solución es, por el caso anterior, $\mathbf{x}_{0}=\ell \cap \overline{\mathbf{p q}_{0}}$.
Pero observa cómo además de que el ángulo $\alpha$ con el que llega el bombero a $\mathcal{l}$ es igual al ángulo de «de reflexión» con el que sale corriendo al fuego (ya con la cubeta llena), e igual al ángulo con el que seguiría su trayecto al fuego virtual; y que esta propiedad determina el punto de mínimo recorrido $\mathbf{x}_{0}$; es fácil convencerse de que para cualquier otro punto de $\mathcal{l}$ los ángulos de llegada y de salida son distintos. Si los bomberos fueran fotones que salen de $\mathbf{p}$ y $\mathcal{l}$ es un espejo, el único que llega a $\mathbf{q}$ es el fotón de recorrido mínimo.
Para aterrizar nuestro problema del bombero al caso de las elipses, considera ahora que $\mathbf{p}$ y $\mathbf{q}$ son los focos de una elipse y $\mathbf{x}_{0}$ un punto en ella. Sea $\mathcal{l}$ la recta que pasa por $\mathbf{x}_{0}$ y bisecta (por fuera) los segmentos de $\mathbf{p}$ y $\mathbf{q}$ a $\mathbf{x}_{0}$. Por construcción, y considerando la solución al problema del bombero, cualquier otro punto $\mathbf{x} \in \mathcal{l}$ tiene mayor suma de distancias a los focos y por tanto está fuera de la elipse. Esto demuestra que $\mathcal{l}$ es la tangente a la elipse en el punto $\mathbf{x}_{0}$, y por lo tanto, queda demostrada la propiedad focal de la elipse.
Antes de dar por terminada esta sección, te invito a que experimentes con el siguiente recuadro interactivo de GeoGebra: en él podrás ver cómo funciona esta propiedad focal de las elipses para elipses de diferentes tamaños y posiciones. ¿Puedes ver qué pasa con esta propiedad para el caso degenerado de la elipse? ¿Qué pasa si los focos son el mismo punto?
Propiedades métricas de la elipse
Tocaremos brevemente el tema de las propiedades métricas de la elipse; lo haremos sólo superficialmente pues una demostración formal se escapa de lo que planeamos cubrir en este curso. Si no estás familiarizado con los términos que aparecen en esta sección, no te preocupes, enfócate en entender cómo se llegó a los resultados y tenlos como referencia por si los ocupas en algún otro curso un poco más enfocado a las aplicaciones de las elipses.
La primera de sus propiedades métricas que vamos a abordar es el área de la elipse: considera que esta propiedad se refiere a la elipse con ecuación:
Para toda $x \in[-a, a]$, esta curva es la mitad superior de la elipse. Entonces, el doble de la integral $y(x)$ sobre le intervalo $[-a, a]$ será el área de la elipse:
\begin{equation} \begin{aligned} A_{\text {ellipse }} &=\int_{-a}^{a} 2 b \sqrt{1-\frac{x^{2}}{a^{2}}} d x \ &=\frac{b}{a} \int_{-a}^{a} 2 \sqrt{a^{2}-x^{2}} d x . \end{aligned} \end{equation}
La segunda integral es el área del círculo con radio $a$, la cual vale $\pi a^{2}$. Entonces,
\begin{equation} A_{\text {ellipse }}=\frac{b}{a} \pi a^{2}=\pi a b. \end{equation}
La circunferencia de una elipse, es decir, el análogo del perímetro para las circunferencias presenta un problema: ¡es bastante difícil de obtener! pues hay que calcular una integral que no puede ser evaluada en términos de funciones elementales. De momento, pondremos sólo la fórmula, pues es un resultado bastante útil. Si te interesa ver cómo se llegó a este resultado, puedes revisar la siguiente fuente.
\begin{equation} C \approx \pi[3(a+b)-\sqrt{(3 a+b)(a+3 b)}]=\pi\left[3(a+b)-\sqrt{10 a b+3\left(a^{2}+b^{2}\right)}\right] \end{equation}
La última de estas propiedades métricas que veremos superficialmente será la curvatura; esto te podría resultar especialmente útil si por ejemplo quisieras calcular la curvatura de la trayectoria para una partícula que se mueve trazando una parábola. La curvatura para una elipse con ecuación canónica $\frac{x^{2}}{a^{2}}+\frac{y^{2}}{b^{2}}=1$ será:
En esta entrada y en la anterior profundizamos en las propiedades de la elipse. Seguiremos nuestro estudio de las secciones cónicas definiendo a las hipérbolas, veremos que a pesar de ser figuras muy distintas, guardan una relación estrecha con los círculos y las elipses. Al igual que para las figuras que hemos visto hasta el momento, entenderemos cómo llegar a una expresión analítica y aprenderemos a leer toda la información geométrica que contiene.
Tarea moral
Demuestra la propiedad focal de la elipse sin resolver el problema del bombero. Sugerencia. toma el círculo de radio $2\mathbf{a}$ centrado en un foco $\mathbf{p}$ y luego ve que para los puntos de este círculo, su mediatriz con $\mathbf{q}$ es tangente a una elipse.
Halle la ecuación de la elipse con centro en el origen que satisface las condiciones dadas; construya la curva:
La longitud del eje mayor es $10$ y l del eje menor $8$; los focos están sobre el eje $y$.
El eje menor mide $10$ y un vértice es $(6,0)$.
El lado recto mide $\frac{32}{7}$ y uno de los extremos del eje menor está en $(4,0)$.
Obten el área de la elipse que tiene la siguiente ecuación:
$$ \frac{x^{2}}{16}+\frac{y^{2}}{25}=1 $$
Obtenga una aproximación del perímetro de la siguiente elipse:
$$ \frac{x^{2}}{25}+\frac{y^{2}}{225}=1 $$
Obtenga la curvatura de la siguiente elipse en el punto $(3,2)$: