(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
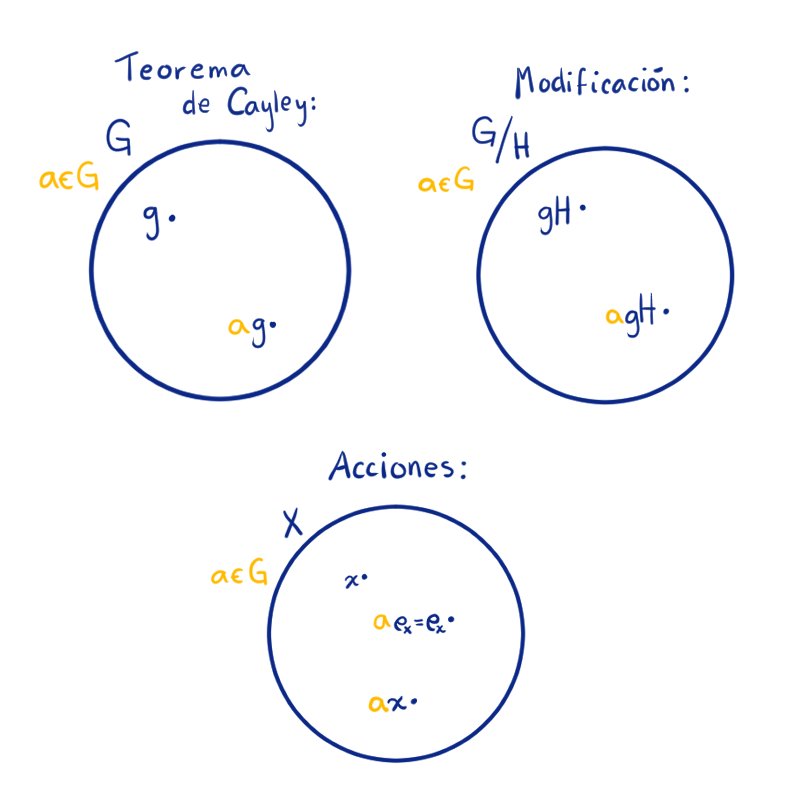
Antes de comenzar con el tema que nos compete, repasemos lo que hemos visto del Teorema de Cayley y su modificación de la entrada anterior. Primero, en el Teorema de Cayley, comenzamos tomando un grupo $G$, un $a$ en el grupo y actuamos con ese $a$ sobre el grupo, es decir multiplicamos los elementos. En resumen, nos permite mover los elementos del mismo grupo.
Con la modificación avanzamos en la abstracción. En el teorema nos tomamos el conjunto de clases laterales y ahora, $G$ actúa sobre las clases laterales. Detente un minuto para pensar, si cada vez somos más generales ¿cuál es el siguiente paso? ¿sobre quién queremos que actúe $G$ ahora?
La respuesta es: sobre un conjunto cualquiera $X$. Ahora queremos pensar que usamos los elementos de $G$ para mover elementos de $X$. Para eso necesitamos una especie de producto, además de algunos matices. Por ejemplo, para un $x\in X$ cuando $a = e$, el elemento $a\cdot x = x$ se quede fijo y que si se multiplica por $a$ y luego por $b$, que sea lo mismo que multiplicar por $ab$, es decir $a\cdot(b\cdot x) = ab\cdot x$. Si se cumplen estas dos condiciones diremos que $a$ es una acción de $G$ en el conjunto $X$.
Diagrama de qué es una acción.
Luces, cámara, ¡acción!
Como verás, hemos estado usando el verbo actuar para referirnos a esta transformación que sucede al operar un $a\in G$ y otro elemento, sea del mismo $G$ o de las clases laterales. Aunque no hayamos definido formalmente qué es una acción, la realidad es que ya usar actuar da una idea de lo que estamos queriendo decir. Estamos usando un elemento de un grupo $G$ para mover un elemento de otro conjunto $X$. A continuación definiremos formalmente a una acción.
Definición. Sean $G$ un grupo y $X$ un conjunto. Si existe una función: \begin{align*} G \times X &\to X\\ (a,x) &\to a\cdot x \end{align*} para todos $a\in G, x\in X$, tal que:
$e \cdot x = x$ para toda $x\in X$.
$a \cdot (b\cdot x) = (ab)\cdot x $ para cualesquiera $a,b\in G, x\in X$,
decimos que la función es una acción de $G$ en $X$, y que $G$ actúa en $X$ o que $X$ es un $G$-conjunto.
Ejemplos.
Veamos algunos ejemplos nuevos y retomemos algunos otros, para verificar que esto es una generalización para lo que se hizo en el Teorema de Cayley y en su modificación.
Ejemplo 1. Sean $G$ grupo y $X=G$. Definimos $a\cdot x = ax$ para cualesquiera $a\in G, x\in X$. Es decir, definimos una acción sobre sí mismo. Probemos las dos condiciones:
\begin{align*} &e\cdot x = ex = x &\forall x\in X\\ &a\cdot(b\cdot x) = a\cdot(bx) = a(bx) = (ab)x = (ab)\cdot x &\forall a,b\in G,\; x\in X. \end{align*}
Así, todo grupo $G$ actúa en sí mismo mediante su operación binaria. Como vimos en la entrada del Teorema de Cayley.
Ejemplo 2. Sean $G$ grupo, $H\leq G$, $X = \{gH | g\in G\}$. Definimos $a\cdot (gH)= agH$ para toda $a,g\in G$. Ahora, probemos las dos condiciones de una acción:
Así se tiene una acción de $G$ en las clases laterales de $H$ en $G$. Este ejemplo lo vimos en la entrada de la modificación al Teorema de Cayley.
Por último, podemos ver un ejemplo nuevo.
Ejemplo 3. Sean $G = D_{2n}$ el grupo diédrico, $X = \{1,2,\cdots, n\}$ los distintos vértices de polígono regular de $n$ lados.
Dados $g\in G, i\in X$ definimos $g\cdot i = j$ si $g$ manda el vértice $i$ en el vértice $j$. Recordemos que los elementos de un grupo diédrico son las simetrías del polígono regular de $n$ lados, es decir, son transformaciones lineales del plano que mandan del polígono en sí mismo. En particular, los vértices van a dar a vértices bajo estas transformaciones.
Representación de una grupo diédrico.
Entonces, como son transformaciones del plano nuestra acción quedaría como una evaluación $g \cdot i = g(i)$. Así, para todos $i\in X, g,h\in G$, \begin{align*} \text{id}\cdot i &= \text{id}(i) = i \\ g\cdot (h\cdot i )& = g\cdot (h(i)) = g(h(i)) = (gh) (i) = (gh) \cdot i. \end{align*}
Así, $D_{2n}$ actúa en el conjunto de vértices.
Recordemos que al escribir $(gh)\cdot i$, la operación que ocurre entre $g$ y $h$ es la composición. En este momento se omitió el símbolo $\circ$ para evitar confusiones con el símbolo $\cdot$ de acción.
Otra definición de Acción
Anteriormente hemos visto la noción de que los elementos de un grupo dan lugar a permutaciones. Usaremos esta idea para dar una definición de acción equivalente a la definición que acabamos de dar.
Teorema. Sean $G$ un grupo y $X$ un conjunto. Toda acción de $G$ en $X$ induce un homomorfismo de $G$ en $S_X$ y viceversa.
Es decir, existe una biyección entre el conjunto de acciones de $G$ en $X$ y el conjunto de homomorfismos entre $G$ y $S_X$. Recordemos que $S_X = \{\sigma: X \to X | \sigma \text{ es biyectiva}\}.$
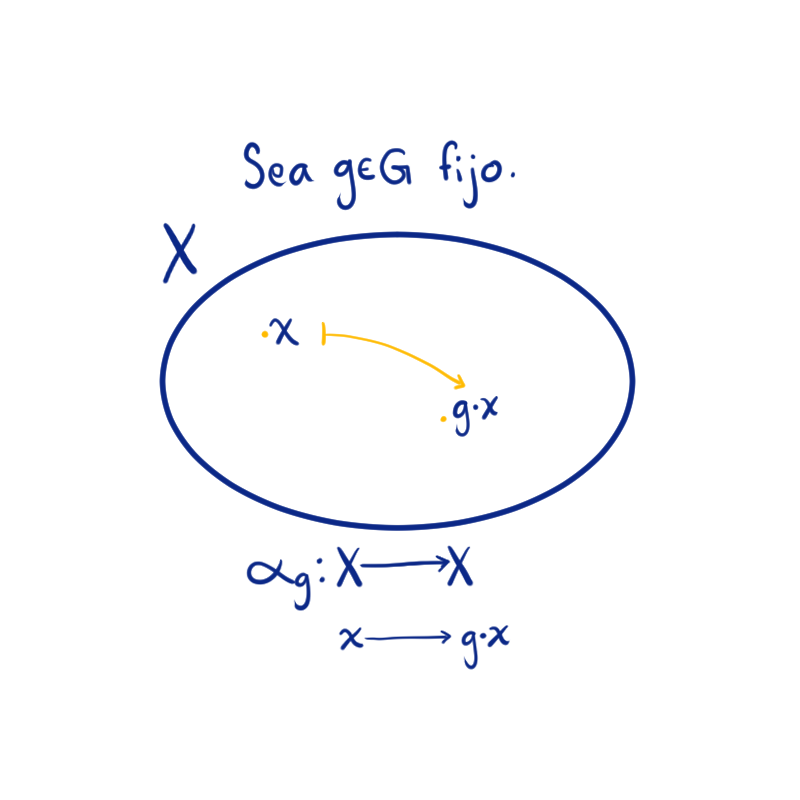
Demostración. Sean $G$ un grupo y $X$ un conjunto. Supongamos que $G\times X \to X$ es una acción de $G$ en $X$ tal que $(g,x)\to g\cdot gx$. Para cada $g\in G$ definimos $\alpha_g : X\to X$ dada por $\alpha_g(x) = g\cdot x$ para toda $x\in X$.
Ilustración del efecto de $\alpha_g$.
Analicemos las funciones $\alpha_g$, veamos que son biyectivas:
\begin{align*} \alpha_g\circ\alpha_{g^{-1}}(x) & = \alpha_g(\alpha_{g^{-1}}) \\ &= \alpha_g(g^{-1}\cdot x) = g\cdot(g^{-1}\cdot x)\\ &= (gg^{-1})\cdot x &\text{Condición 2 de acción}\\ &= e\cdot x \\ &= x &\text{Condición 1 de acción}. \end{align*}
Entonces $\alpha_g\circ\alpha_{g^{-1}} = \text{id}_X$.
Análogamente $\alpha_{g^{-1}}\circ \alpha_g = \text{id}_X$. Entonces $\alpha_g$ es biyectiva, es decir $\alpha_g \in S_X$.
Definimos $\psi: G \to S_X$ con $\psi (g) = \alpha_g$ para toda $g\in G$.
Veamos que $\psi$ es un homomorfismo. Tomemos $g,h\in G$, \begin{align*} \psi(gh)(x) &= \alpha_{gh}(x) \\ &= (gh)\cdot x \\ &= g\cdot(h\cdot x) \\ &= \alpha_g(\alpha_h(x)) & \text{Condición 2}\\ &= \alpha_g \circ \alpha_g(h) \\ &= \psi(g) \psi(h)(x) &\forall x\in X. \end{align*}
Entonces $\psi(gh) = \psi(g)\psi(h)$ para cualesquiera $g,h\in G$.
Por lo tanto $\psi$ es un homomorfismo.
Ahora de regreso. Supongamos ahora que se tiene un homomorfismo $\psi: G\to S_X$. Entonces, para cada $g\in G, \psi(g) \in S_x$.
Definimos la función $G\times X \to X$ donde $(g,x)\to g\cdot x$. Entonces $g\cdot x = \psi(g)(x)$ para toda $g\in G, x\in X$. Además, $\psi(g)(x) \in X$.
Ahora veamos que esta función es una acción. La primera condición para ser acción se cumple de la siguiente manera:
Como $\psi$ es un homomorfismo, $\psi(e) = \text{id}_X$. Así, \begin{align*} e\cdot x& = \psi(e)(x) = \text{id}_X(x) = x &\forall x\in X. \end{align*}
Probemos la segunda condición de acción:
\begin{align*} g\cdot (h\cdot x) &= \psi(g) (\psi(h)(x)) \\ &= \psi(g)\circ \psi(h)(x) \\ &= \psi(gh)(x) \\ &= (gh) \cdot x & \psi\text{ es un homomorfismo}. \end{align*} Para $g,h\in G, x\in X$. Así $G$ actúa en $X$.
$\blacksquare$
Una relación de equivalencia
Si tenemos un grupo $G$ actuando sobre un conjunto $X$, entonces podemos considerar $g\in G$ y $x,y\in X$. Con los dos elementos $x,y$ de $X$, podemos preguntarnos ¿es posible llegar de $x$ a $y$ usando a $g$?, algo como $y = g\cdot x$. En realidad esto no es siempre posible, entonces podemos crear una relación de $x$ con $y$ si existe tal $g\in G$. Esto lo veremos en el siguiente resultado.
¿Es posible llegar de $x$ a $y$ usando a $g$?
Lema. Sean $G$ un grupo, $X$ un $G$-conjunto. Para todo $x,y\in X$, la relación en $X$: $x\sim y$ si y sólo si $g\cdot x = y$ para algún $g\in G$ es una relación de equivalencia.
Demostración. Sean $G$ un grupo, $X$ un $G$-conjunto. Definimos la relación en $X$ donde para todo $x,y\in X$. \begin{align*} x\sim y \Leftrightarrow g\cdot x = y \text{ para algún }g\in G. \end{align*}
Primero, por la condición 1 de acción, $e\cdot x = x$ para toda $x\in X$ con $e\in G$, entonces $x\sim x$ para toda $x\in X$. Por lo que nuestra relación es reflexiva.
Si $x,y\in X$ son tales que $x\sim y$, entonces existe $g\in G$ tal que $g\cdot x = y$. Así, \begin{align*} g^{-1} \cdot y &= g^{-1}\cdot (g\cdot x) \\ &= (g^{-1}g)\cdot x & \text{por condición } 2\\ &= (e\cdot x )\\ &= x & \text{por condición } 1 \end{align*}
con $g^{-1} \in G$, entonces $y\sim x$. Por lo que tenemos una relación simétrica.
Si $x,y,z\in X$ son tales que $x\sim y$ y $y\sim z$, entonces existen $g,h\in G$ tales que $g\cdot x = y$, $h\cdot y = z$. Así \begin{align*} (hg)\cdot x &= h\cdot (g\cdot x) &\text{condición } 2\\ &= h \cdot y\\ &= z \end{align*} con $hg\in G$. Entonces $x\sim z$. Así, nuestra relación es transitiva.
Por lo tanto $\sim$ es una relación de equivalencia.
$\blacksquare$
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
En los siguientes incisos determina si la función dada es una acción de $G$ en $X$:
Considera un campo $K$ y $V$ un $K$-espacio vectorial. Sea $G= K^*$ con el producto y $X= V$. Definimos $\lambda\cdot v = \lambda v$ para cada $\lambda\in K^*$ y $v\in V$. (Nota que $K^*$ es el campo sin el neutro aditivo).
Sean $G$ un grupo y $X=G$. Definimos $g\cdot x = g^{-1}xg$ para cada $g\in G$ y cada $x\in X$.
Sean $G$ un grupo y $X = \{H|H\leq G\}$. Definimos $g\cdot H = gHg^{-1}$ para cada $g\in G$ y cada $H\in X$.
Sean $G$ un grupo y $X=N$ un subgrupo normal de $G$. Definimos $g\cdot n= gng^{-1}$ para cada $g\in G$ y cada $n\in N$.
Sean $G$ un grupo y $X$ un $G$ conjunto. Considera el homomorfismo $\psi: G\to S_X$ asociado. ¿Es necesariamente $\psi$ un monomorfismo? Si lo es, pruébalo y si no, establece qué condiciones debería cumplir la acción para que lo sea.
Para repasar lo que hemos visto desde el Teorema de Cayley, puedes consultar el video en inglés de Mathemaniac.
Más adelante…
Hemos expandido la idea de que un grupo puede mover a los elementos de otro hasta llamarlo una acción. Luego, encontramos una relación de equivalencia a partir de la acción. Como es usual en este tipo de cursos, estudiaremos la partición inducida por esta relación de equivalencia y a partir de estos conjuntos, definiremos otros tipos de acciones.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
En la entrada anterior aprendimos que el Teorema de Cayley es muy útil porque nos permite visualizar a un grupo $G$ como un subgrupo del grupo de permutaciones. Si el grupo es de orden $n$, se puede visualizar como un subgrupo del grupo $S_n$ que tiene orden $n!$, entonces hemos visualizado a $G$ como parte de un grupo de permutaciones $S_n$ que es realmente mucho más grande que $G$. Lo que haremos en esta entrada es relacionar al grupo $G$ con un grupo simétrico pero más pequeño que $S_n$. Utilizaremos los elementos de $G$ no para mover sus propios elementos, si no, para mover clases laterales.
Después de probar este resultado, veremos una aplicación de esta modificación del Teorema de Cayley para trabajar con clase laterales. Esta aplicación generaliza el resultado que se probó para grupos normales, anteriormente establecimos que todo subgrupo de índice 2 es un subgrupo normal. Probaremos que si tomamos el menor primo que divide al orden de un grupo y tenemos un subgrupo ese índice, entonces este subgrupo tiene que ser normal.
Relacionemos a $G$ con un grupo simétrico más pequeño
En el siguiente teorema relaciona a $G$ con un grupo simétrico, pero en este caso $n$ no es el orden de $G$, si no el índice de $G$ con respecto a un subgrupo $H$.
Teorema. Sean $G$ un grupo, $H$ subgrupo de $G$ de índice finito, $[ G:H ] = n.$ Entonces, existe un homomorfismo $\phi: G \to S_n$ con $\text{Núc }\phi \leq H$.
Observemos que el Teorema de Cayley nos da un isomorfismo y este teorema sólo nos da un homomorfismo (no necesariamente inyectivo). De todas maneras, se puede usar este teorema para probar otros resultados.
Demostración. Sean $G$ un grupo, $H\leq G$ de índice finito, digamos $[ G:H ] = n$. Para cada $a \in G$ definimos $\tau_a : G/H \to G/H$ con $\tau_a(gH) = agH$ para toda $g\in G$.
Para esta demostración, como $H$ no es necesariamente normal, $G/N$ no es un grupo. Sólo lo estamos pensando como la colección de todas las clases laterales de $G$ con respecto a $H$.
Dada $g\in G$. Se tiene que \begin{align*} \tau_a \circ \tau_{a^{-1}} (gH) &= \tau_a(\tau_{a^{-1}}(gH)) = a(a^{-1}g)H = gH\\ \tau_{a^{-1}} \circ \tau_a (gH)&= \tau_{a^{-1}} (\tau_a(gH)) = a^{-1}(ag)H = gH. \end{align*}
Así, $\tau_{a^{-1}}$ es la inversa de $\tau_a$ y $\tau_a$ es biyectiva.
Definimos entonces $\psi: G \to S_{G/H}$ con $\psi(a) = \tau_a$ para todo $a\in G$. Tomemos $a,b\in G$ y $g\in G$. A continuación demostraremos que $\psi$ es un homomorfismo: \begin{align*} \psi(ab) (gH) &= \tau_{ab}(gH) \\ &= (ab)gH \\ &= a(bg)H \\ &= \tau_a(\tau_b(gH))\\ &= \tau_a \circ \tau_b(gH) = \psi (a) \circ \psi(b) (gH). \end{align*}
Observemos que las igualdades son producto exclusivamente de las definiciones de $\psi$ y de $\tau_a$. Así, $\psi(ab) = \psi(a)\circ\psi(b)$ para todo $a,b\in G$. Por lo que $\psi$ es un homomorfismo.
Ahora pasemos a la segunda parte del teorema.
Si $a\in\text{Núc }\psi$, $\psi(a) = \text{id}_{G/N}$ y entonces, para todo $g\in G$ obtenemos, \begin{align*} \psi(a)(gH) = gH &\Rightarrow \tau_a(gH) = gH & \text{definición de }\psi\\ &\Rightarrow agH= gH & \text{pues } \psi(a) = \text{id}_{G/N} \\ &\Rightarrow aH = H &\text{en particular, cuando } g=e\\ &\Rightarrow a \in H. \end{align*}
Por lo tanto $\text{Núc }\psi \leq H$.
Como $\#G/N = n$, sabemos que $S_{G/N}\cong S_n$ y existe $\rho: S_{G/H}\to S_n$ un isomorfismo. Así $\rho\circ\psi: G\to S_n$ es el homomorfismo buscado.
$\blacksquare$
Observación. Si $H = \{e\}$ se tiene el Teorema de Cayley.
Ilustremos lo aprendido
Veamos un ejemplo.
Ejemplo. Tomemos el grupo simétrico $G = S_3$, el subgrupo $H = \left<(1,2)\right>$ y el cociente $G/H = \{H, (1\;3)H, (2\;3)H\}$.
Retomemos la función de la demostración: $\psi: S_3 \to S_{G/H}$, $\psi(a) = \tau_a$ para toda $a \in S_3$. Entonces,
Así, en este caso si $a\in \text{Núc }\psi$, \begin{align*} a(1\;3)H = (1\;3)H &\Rightarrow (1\;3) a (1\;3) \in H = \{(1), (1\;2)\}. \end{align*} Recordemos que dos clases laterales $aH, bH$ son iguales si y sólo si $b^{-1}ab\in H$. En este caso, el inverso de $(1\;3)$ es él mismo. \begin{align*} &\Rightarrow a = (1) \text{ o } a = (1\; 3) (1\; 2)(1\;3) = (3\;2). \end{align*}
Sin embargo, como $a\in\text{Núc }\psi$, no sólo deja fijo a $(1\;3)$, si no también a $(2\;3)$, siguiendo un razonamiento similar obtenemos: \begin{align*} a(2\;3)H = (2\; 3)H &\Rightarrow (2\; 3)a(2\; 3) \in H = \{(1), (1\;2)\}\\ &\Rightarrow a = (1) \text{ o } a = (2\; 3) (1\; 2) (2\; 3) = (1\; 3). \end{align*}
Entonces, por un lado tenemos que $a = (1) \text{ o } a = (3\;2)$ y por el otro, tenemos que $a = (1) \text{ o } a = (1\; 3)$. Así, $a = (1)$.
Por lo tanto, $\text{Núc }\psi = \{(1)\}\leq H.$
Aplicación de la modificación
A continuación veremos la aplicación de la modificación del Teorema de Cayley que mencionamos en la introducción. La aplicación consiste en una generalización de un resultado visto previamente. En entradas anteriores, vimos que todo subgrupo de índice 2 es un subgrupo normal. Ahora veremos que si hay un subgrupo de orden el menor primo que divide al orden de un grupo, este subgrupo será normal.
Corolario. Si $G$ es un grupo finito y $p\in \z^+$ es el menor primo positivo que divide al orden de $G$, entonces todo subgrupo de $G$ de índice $p$ es normal en $G$.
Demostración. Sea $G$ un grupo finito, $|G|= n$, $p\in\z^+$ el menor primo positivo que divide a $n$.
Supongamos que $H\leq G$ con $[ G:H ] = p$. Probaremos que $H$ es normal.
Sea $\psi:G\to S_{G/H}$ con $\psi(a) = \tau_a$ para toda $a\in G$ como en el teorema anterior. Sabemos que $\text{Núc } \psi \leq H \leq G$, como secuencia del Teorema de Lagrange tenemos \begin{align} \label{eq:orden} [ G: \text{Núc }\psi] = [ G:H ] [ H: \text{Núc }\psi ] = p [ H:\text{Núc } \psi]. \end{align}
Por el Primer Teorema de Isomorfía, $$G/\text{Núc }\psi\cong \text{Im }\psi \leq S_{G/H}\cong S_p,$$
Si $[ H: \text{Núc }\psi ] > 1$, existiría $q\in\z^+$ un primo que lo divide, entonces $q\Big| a$ con $a \in \{1,2,\dots,p-1\}$. Por lo tanto $q<p.$
Pero, por el Teorema de Lagrange, $$|G| = [ G:\text{Núc }\psi ] |\text{Núc }\psi| = [ G:H] [ H: \text{Núc }\psi] |\text{Núc }\psi|.$$ Entonces $[ H: \text{Núc }\psi] \Big| |G|.$
Y como $q| [ H : \text{Núc }\psi ]$, entonces $q\Big||G|$.
Entonces, $q$ sería un divisor primo positivo de $n$, menor que $p$. Esto es una contradicción.
Así $[ H: \text{Núc }\psi ] = 1$, de donde $|H| = |\text{Núc }\psi|$ y como $ \text{Núc }\psi \leq H$ concluimos que $H = \text{Núc }\psi \unlhd G.$
Por lo tanto $H\unlhd G$.
$\blacksquare$
Observación. No siempre existe dicho subgrupo, por ejemplo $A_4$ no tiene subgrupos de índice 2.
Esto sucede porque $A_4$ tiene 12 elementos, el menor primo que divide a 12 es 2. Pero, de acuerdo a lo que estudiamos, $A_4$ no tiene subgrupos de orden 6, entonces no existen subgrupos de índice 2.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra la observación: Si $H = \{e\}$ se tiene el Teorema de Cayley.
Sea $V$ el grupo de Klein. $H = \left< (1,0) \right>$. Determina cómo son las funciones $\tau_a$ para cada $a\in V$ y describe cómo se puede visualizar a cada elemento $a\in V$ como una permutación en $\{(a,b) + H\,|\, (a,b) \in V \}$, y como una permutación en $S_2$.
Dado $G$ un grupo y $H$ un subgrupo de $G$ de índice finito $n$, sabemos que existe un homomorfismo $\phi$ de $G$ en $S_n$ con $\text{Núc }\phi \leq H.$ Da una condición necesaria y suficiente para que $\text{Núc }\phi = H.$
Sean $G$ un grupo finito de orden $n$ y $H$ un subgrupo de de índice primo $p$. ¿Es $H$ normal en $G$? Prueba o da un contraejemplo.
Más adelante…
Con este teorema hemos avanzado un pasito en la idea de usar elementos de un grupo para modificar otro, ahora usando clases laterales. El Teorema de Cayley y su modificación son importantes para el tema que veremos en la siguiente entrada, donde ahora sí, usaremos un grupo cualquiera para actuar sobre otro grupo cualquiera.
Sabemos que la gráfica de una función de $\mathbb{R}^2$ a $\mathbb{R}^2$ es un subconjunto de $\mathbb{R}^4$, por lo que si quisiéramos visualizar la gráfica de una función compleja de variable compleja, como hacíamos usualmente con funciones cuyas gráficas tenían lugar en $\mathbb{R}^2$ o en $\mathbb{R}^3$, nos será imposible.
Al trabajar en Cálculo con integrales dobles era de nuestro interés saber cómo se transformaban ciertas regiones $A\subset\mathbb{R}^2$ del plano, bajo ciertas transformaciones $T:\mathbb{R}^2 \to \mathbb{R}^2$ para poder entender de manera geométrica lo que sucedía al aplicar un cambio de variable con nuestras regiones de integración.
Una primera alternativa para poder estudiar la geometría de las funciones complejas, es analizar su comportamiento gráfico siguiendo esta idea de las transformaciones entre planos. Por lo que, resultará conveniente considerar a las funciones complejas como transformaciones del plano complejo, es decir, para darnos una idea de lo que hacen estas funciones las veremos como mapeos o transformaciones de un subconjunto de $\mathbb{C}$ en un plano $z$, que toman valores en un plano $w$. Si escribimos a $z=x+iy\in\mathbb{C}$ y a $w=u+iv\in\mathbb{C}$, tendremos al plano $z$ asociado con los ejes $x$ y $y$, mientras que para el plano $w$ se tienen los ejes $u$ y $v$, los cuales, en ambos casos, corresponden con los ejes real e imaginario, respectivamente.
Observación 26.1. Debemos tener presente que esta alternativa no es la única forma para dar una interpretación del comportamiento geométrico de una función compleja, ya que también puede representarse a las funciones complejas mediante:
las gráficas de su parte real e imaginaria,
las gráficas del módulo complejo de la función,
superficies de Riemann.
Se puede consultar un poco sobre estás técnicas en las siguientes ligas:
Sin embargo, para los fines del curso bastará con esta alternativa de pensar a las funciones como transformaciones del plano en el plano.
Para plantear lo anterior consideremos la siguiente:
Definición 26.1. Sea $S\subset\mathbb{C}$, se define a la imagen de $S$ bajo una función $f$, denotada por $f(S)$, como el conjunto: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \,:\, w = f(z),\, z\in S\right\}. \end{equation*}
Analicemos los siguientes ejemplos para comprender mejor esta idea de las transformaciones complejas.
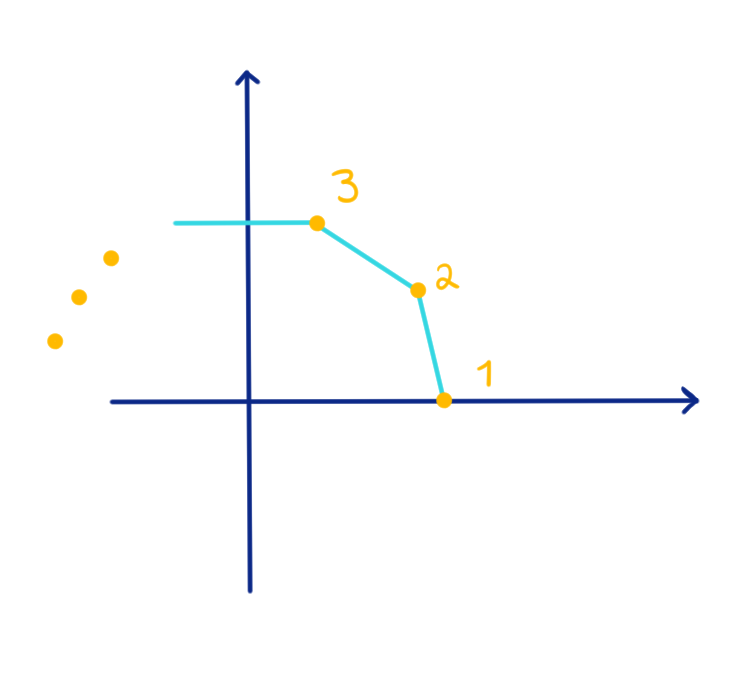
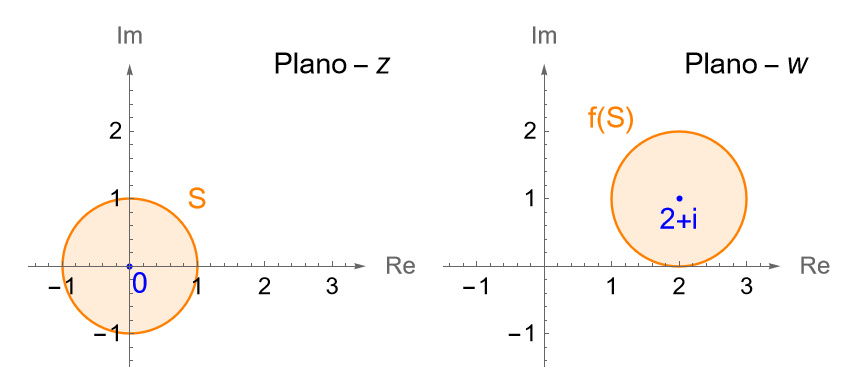
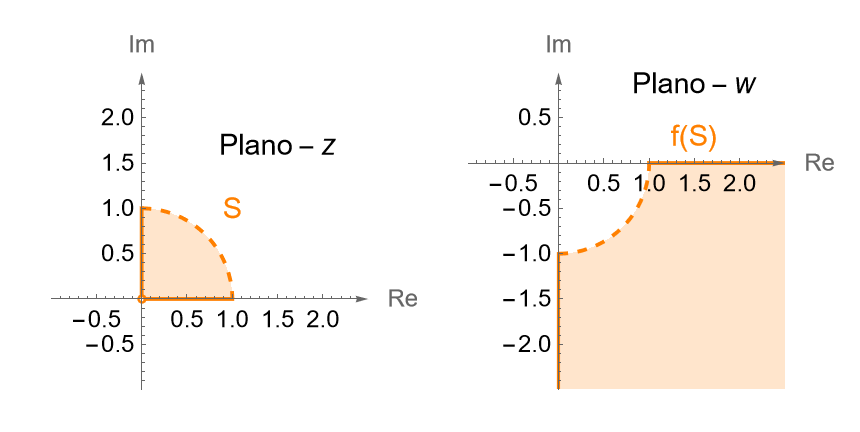
Ejemplo 26.1. Sea $S$ el disco unitario, es decir $S=\overline{B}(0,1)$. Determinemos la imagen de $S$ bajo la transformación $f(z) = z+2+i$.
Solución. Notemos que para cada $z\in S$ el valor de $w=f(z)$ está dado por la suma de $2+i$ al valor de $z$. Considerando a $z=x+iy$, tenemos que: \begin{equation*} w = f(z) = (x+2) + i(y+1), \end{equation*} por lo que la función $f$ transforma los puntos $(x,y)$ en los puntos $(u,v)$, donde $u=x+2$ y $v=y+1$. Es claro que $f$ simplemente traslada a cada elemento del disco unitario $S$ dos unidades a la derecha y una unidad hacia arriba, figura 98, es decir: \begin{align*} f(S) & = \{ w\in\mathbb{C} \,:\, |\,w-(2+i)\,|\leq 1 \}\\ & = \overline{B}(2+i,1). \end{align*}
Figura 98: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Esta transformación de la forma $f(z)=z+b$, con $b\in\mathbb{C}$ constante, nos determina una traslación. Consideremos ahora transformaciones de la forma $f(z) = az$, con $a\in\mathbb{C}\setminus\{0\}$. Veamos que dichas transformaciones nos determinan rotaciones y homotecias en el plano complejo.
Observación 26.2. Recordemos que al multiplicar a los números complejos $a=\rho\operatorname{cis}(\alpha)\neq 0$ y $z = r \operatorname{cis}(\theta)$ tenemos: \begin{equation*} az = r\rho \operatorname{cis}(\alpha + \theta) = r \rho e^{i(\alpha + \theta)}, \end{equation*} de donde es claro que la transformación $f(z) = az$ nos devuelve una homotecia desde que al módulo de $z$ se le multiplica por una constante $\rho>0$. Por otra parte, notemos que tenemos una rotación del número complejo $z$ desde que a su argumento $\theta$ se le suma el argumento $\alpha$. Además, dado que el producto de números complejos es conmutativo, es claro que la homotecia y rotación que se le aplica a cada número complejo $z$ se puede realizar en cualquier orden. Notemos que tenemos los siguientes casos:
Si $a = \rho >0$, entonces tenemos que la transformación $f(z) = az$ es simplemente una homotecia por un factor $a$.
Si $\rho = 1$, entonces tenemos que la transformación $f(z) = az = e^{i\alpha} z$ es simplemente una rotación por un ángulo $\alpha$.
Si $\rho>0$, entonces tenemos que la transformación $f(z) = az = \rho e^{i\alpha} z$ es una homotecia por un factor $\rho$ seguida de una rotación por un ángulo $\alpha$.
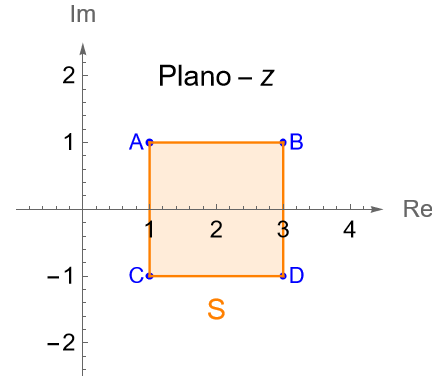
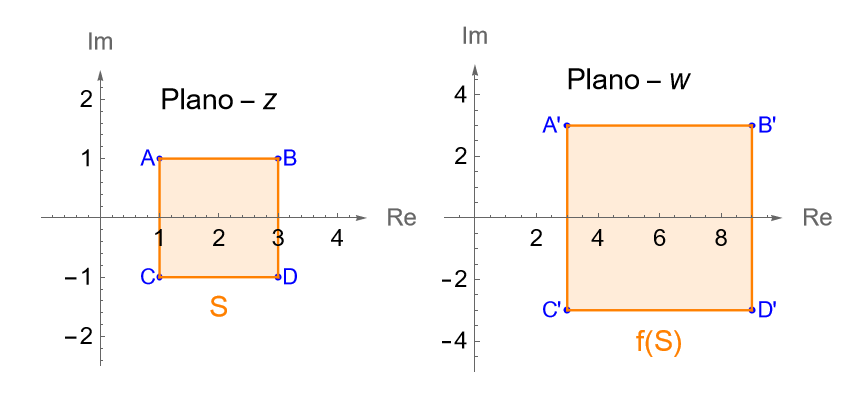
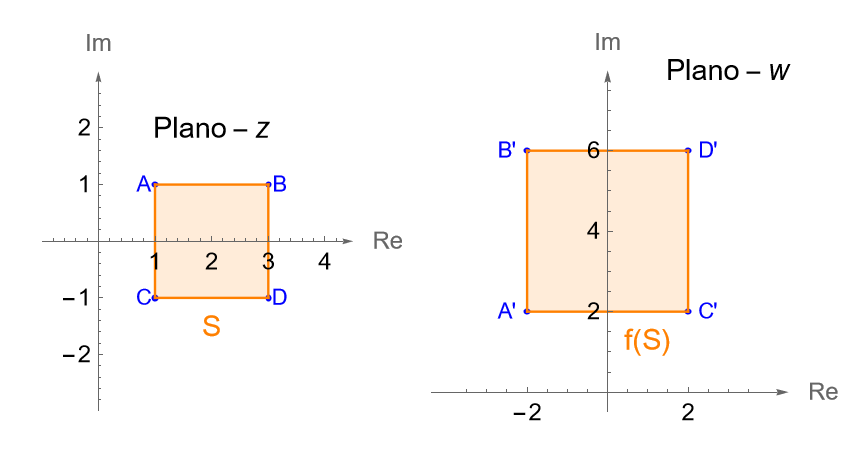
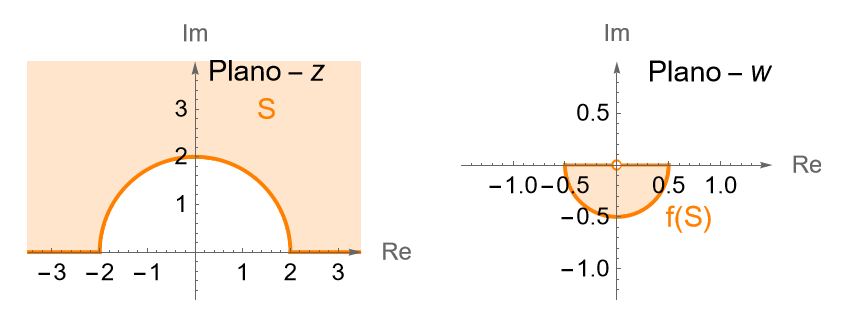
Ejemplo 26.2. Sea $S$ el cuadrado cerrado con centro en el punto $z=2$, cuyos lados son paralelos a los ejes real e imaginario y tienen una longitud $2$, figura 99.
a) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=3z$? b) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=2iz$?
Figura 99: Gráfica del conjunto $S$ en el plano $z$.Gráfica del conjunto $S$ en el plano $z$.
Solución.
a) De acuerdo con la observación 26.2 tenemos que $a=3>0$ es una constante, por lo que la transformación $f(z)=3z$ corresponde con una homotecia, ya que bajo $f$ la distancia de cada número complejo $w=f(z)$, medida desde el origen, será tres veces la distancia de cada $z\in S$, medida desde el origen, es decir, el módulo de cada número complejo $z\in S$ será triplicado, mientras que su argumento permanecerá sin cambios. Entonces la imagen de $S$ bajo la transformación $f$, es decir, $f(S)$ será otro cuadrado cuyos vértices corresponden con las imágenes de los vértices del cuadrado $S$, figura 100.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 6,\\ f(A) = 3+3i,\\ f(B) = 9+3i,\\ f(C) = 3-3i,\\ f(D) = 9-3i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=6$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 6.
Figura 100: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
b) Considerando la observación 26.2, tenemos que $a=2i$ es un número complejo cuyo módulo es $r=2$ y su argumento principal es $\alpha = \frac{\pi}{2}$, por lo que la transformación $f(z)=2iz$ corresponde con una homotecia por un factor $r=2$ seguida de una rotación por un ángulo $\alpha=\frac{\pi}{2}$, en sentido contrario a las manecillas del reloj. Entonces, bajo $f$ a cada punto $z\in S$ se le duplicará su módulo y se le sumará $\frac{\pi}{2}$ a su argumento, entonces $f(S)$ será nuevamente un cuadrado cerrado para el cual la distancia del origen a cada $w=f(z)$ será dos veces la distancia del origen a cada $z\in S$ y sus vértices serán las imágenes de los vértices del cuadrado $S$ bajo $f$, figura 101.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 2(2)\operatorname{cis}\left(\frac{\pi}{2} + 0\right) = 4i,\\ f(A) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} + \frac{\pi}{4}\right) = -2+2i,\\ f(B) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{1}{3}\right)\right) = -2+6i,\\ f(C) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} – \frac{\pi}{4}\right) = 2+2i,\\ f(D) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{-1}{3}\right)\right) = 2+6i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=4i$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 4.
Figura 101: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Es posible visualizar las transformaciones de los ejemplos 26.1 y 26.2 en el siguiente applet de GeoGebra https://www.geogebra.org/m/pasmamyw.
Observación 26.3. En conjunto, los ejemplos 26.1 y 26.2 corresponden con transformaciones del tipo $f(z) = az + b$, donde $a,b\in\mathbb{C}$ son dos constantes, y $a\neq 0$ para no trabajar con transformaciones constantes, es decir, transformaciones afines lineales, definición 25.1.
Más aún, de acuerdo con dichos ejemplos, debe ser claro que las transformaciones afines lineales mapean regiones del plano a regiones geométricamente similares. En el caso en que $a=1$ y $b=0$, entonces tenemos a la transformación identidad $\mathbb{I}_\mathbb{C}(z)=z$.
Una pregunta interesante es ¿qué sucede con las transformaciones que no son lineales?, es decir ¿en qué se transforman los subconjuntos de $\mathbb{\mathbb{C}}$ bajo una transformación no lineal? Para responder a esta pregunta analicemos los siguientes ejemplos.
Ejemplo 26.3. Determinemos la imagen de los siguientes conjuntos bajo la transformación inversión, $f(z) = \dfrac{1}{z}$, con $z\neq 0$, $w=f(z)\neq 0$.
a) $S = \left\{z\in\mathbb{C} \,:\, 0<|\,z\,|<1, 0\leq \operatorname{arg} z \leq \dfrac{\pi}{2}\right\}.$ b) $S = \left\{z\in\mathbb{C} \,:\, 2\leq |\,z\,|, 0\leq \operatorname{arg} z \leq \pi\right\}.$
Solución. De acuerdo con el corolario 4.1 (fórmula de De Moivre), para $z = r\operatorname{cis}(\theta)\neq 0$, con $r=|\,z\,|$ y $\theta = \operatorname{arg} z$, tenemos que: \begin{equation*} f(z) = \frac{1}{z} = r^{-1}\operatorname{cis}(\theta) = \frac{1}{r}\left[\operatorname{cos}(-\theta) + i\,\operatorname{sen}(-\theta) \right]. \end{equation*}
Entonces, para cada $z\neq 0$, se tiene que el módulo de $f(z)$ es el recíproco del módulo de $z$, mientras que el argumento de $f(z)$ será el negativo del argumento de $z$.
a) Notemos que si $z\in S$, entonces $z$ cae en el primer cuadrante dentro de la circunferencia unitaria, incluyendo a los ejes real e imaginario, pero sin considerar a $z=0$, figura 102, ya que:
Si $0<|z|<1$, entonces $z$ cae dentro del disco unitario perforado, es decir $z\in B^*(0,1)$.
Si $0\leq \theta \leq \dfrac{\pi}{2}$, entonces tenemos a los $z$ en el primer cuadrante.
Por lo que bajo $f$, los $z\in S$ serán mapeados, en el plano $w$, fuera del disco unitario y en el cuarto cuadrante, incluyendo a los ejes real e imaginario, pero a partir de los $w$ tales que $|w|>1$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} > 1$ y $-\frac{\pi}{2}\leq -\theta \leq 0$. Entonces: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 1<|\,w\,|, -\frac{\pi}{2}\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
b) Notemos que si $z\in S$, entonces $z$ cae en el primer y segundo cuadrante fuera del disco de radio 2 con centro en el origen, incluyendo a la circunferencia de radio $2$ y a los ejes real e imaginario, figura 103, ya que:
Si $|z|\geq 2$, entonces $z$ cae sobre la circunferencia de radio $2$ y fuera de la misma.
Si $0\leq \theta \leq \pi$, entonces tenemos a los $z$ en el primer y segundo cuadrante.
Como el módulo de $z$ crece de $2$ a infinito, entonces bajo $f$ el módulo de $w=f(z)$ decrece de $\dfrac{1}{2}$ a $0$, pero sin llegar a valer $0$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} \leq \dfrac{1}{2}$ y $|\,f(z)\,| >0$ para $z\neq 0$. Por otra parte, como $-\pi \leq – \theta \leq 0$, entonces bajo $f$ los $z$ serán mapeados, en el plano w, en el tercer y cuarto cuadrante en el disco cerrado con centro en el origen y radio $\dfrac{1}{2}$, por lo que: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 0<|\,w\,| \leq \frac{1}{2}, -\pi\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
Figura 102: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Figura 103: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
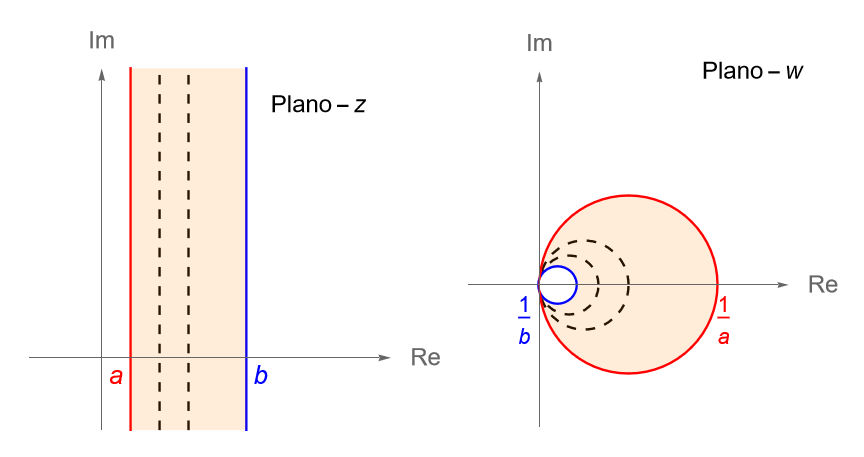
Ejemplo 26.4. Sean $a,b\in\mathbb{R}$ tales que $0<a<b$. Veamos cuál es la imagen de los siguientes conjuntos bajo la transformación inversión, $T(z)=\dfrac{1}{z}$. a) La recta vertical $x = x_0 > 0$ en el plano $z$, es decir $S = \left\{z=x+iy\in\mathbb{C} \,:\, x=x_0>0, y\in\mathbb{R}\right\}$. b) La franja vertical $S = \left\{z=x+iy\in\mathbb{C} \,:\, a\leq x \leq b, y\in\mathbb{R}\right\}$, en el plano $z$. \end{itemize}
Solución.
a) De acuerdo con la observación 25.8 como la recta vertical $x=x_0>0$ no pasa por el origen, entonces la imagen de $S$ bajo $T$ será una circunferencia que pase por el origen en el plano $w$.
Sea $z=x+iy \in S$, entonces tenemos $x = x_0 > 0$ y $y\in\mathbb{R}$. La imagen de $z$ bajo $T$ esta dada por: \begin{equation*} w = u+iv = \frac{1}{z}. \end{equation*}
De acuerdo con (25.7), proposición 25.6, tenemos que: \begin{equation*} u=\frac{x_0}{x_0^2+y^2}, \quad v = -\frac{y}{x_0^2+y^2}, \end{equation*}de donde: \begin{equation*} u^2 +v^2 = \frac{x_0^2 +y^2}{\left(x_0^2+y^2\right)^2} = \frac{1}{x_0^2+y^2} = \frac{u}{x_0}, \end{equation*}por lo que: \begin{align*} &u^2 -\frac{u}{x_0} + v^2 = 0,\\ & \Longleftrightarrow u^2 -\frac{u}{x_0} + \left(-\frac{1}{2x_0}\right)^2 + v^2 = \left(-\frac{1}{2x_0}\right)^2,\\ & \Longleftrightarrow \left( u -\frac{1}{2x_0}\right)^2 + v^2 = \left(\frac{1}{2x_0}\right)^2, \tag{26.1} \end{align*}la cual corresponde con la ecuación de una circunferencia con centro en el punto $w_0 = \dfrac{1}{2x_0} + i0$ y radio $r=\dfrac{1}{2x_0}$, en el plano $w$. Además, notemos que mientras el punto $z=0$ no cae en la recta $S$, el punto $w=0$ sí pertenece a $T(S)$.
b) Considerando el inciso anterior y la observación 25.8, si $0<a<x_0<b$, entonces la recta vertical $x=x_0$ recorre la franja vertical $S$ en el plano $z$, por lo que la imagen de cada recta vertical $x=x_0$ bajo la transformación inversión corresponderá con una circunferencia dada por (26.1), en el plano $w$. De acuerdo con la figura 104 tenemos que $T(S)$ es la región anular acotada por fuera por la circunferencia centrada en $\left(\dfrac{1}{2a}, 0\right)$ de radio $\dfrac{1}{2a}$ y por dentro por la circunferencia centrada en $\left(\dfrac{1}{2b}, 0\right)$ de radio $\dfrac{1}{2b}$.
Figura 104: Gráfica de la franja vertical $S$ bajo la transformación inversión.
Ejemplo 26.5. Determinemos la imagen de la recta vertical $x=k$, donde $k\in\mathbb{C}$ es una constante, bajo la transformación $f(z)=z^2$.
Solución. Sean $z=x+iy\in\mathbb{C}$ y $w=u+iv = f(z)$, entonces: \begin{equation*} u(x,y)=x^2-y^2, \quad v(x,y)=2xy. \end{equation*}
Dado que $x=k$, entonces los puntos sobre dicha recta vertical son de la forma: \begin{equation*} z=k+iy, \quad y\in\mathbb{R}, \end{equation*}por lo que, la imagen de dicha recta, bajo $f$, es: \begin{equation*} u=k^2-y^2, \quad v=2ky, \quad y\in\mathbb{R} \tag{26.2}. \end{equation*}
Si $k=0$, entonces la imagen de la recta vertical $x=0$, correspondiente con el eje imaginario, está dada por: \begin{equation*} u=-y^2, \quad v=0, \quad y\in\mathbb{R}. \end{equation*}
Es decir, la imagen del eje imaginario, bajo la función $f(z)=z^2$, corresponde con el semieje real negativo.
Por otra parte, si $k\neq 0$, entonces de (26.2) tenemos que: \begin{equation*} y = \frac{v}{2k} \quad \Longrightarrow \quad u = k^2 – \frac{v^2}{4k^2}, \quad \Longrightarrow \quad v^2 = -4k^2(u – k^2), \quad v\in\mathbb{R}. \end{equation*}
Por lo que, para $k\neq0$, la imagen de la recta $x=k$ corresponde con la familia de parábolas con eje paralelo al eje real $u$, con vértice en el punto $\left(k^2,0\right)$, las cuales abren hacia la izquierda y cuya intersección con el eje imaginario $v$ son los puntos $\left(0, \pm 2k^2\right)$. Dado que la imagen de las rectas $x=k$ y $x=-k$ es la misma, entonces ambas rectas, bajo $f$, son mapeadas en la parábola $v^2 = -4k^2(u – k^2)$.
Observación 26.4. De manera general, se puede hacer un análisis para la transformación $f(z)=z^n$, con $n>2$. Si consideramos a $z\neq 0$ tal que $z=re^{i\theta}$ y $w=\rho e^{i\phi}$, entonces: \begin{equation*} w=f(z) \quad \rho e^{i\phi} = r^n e^{in\theta}. \end{equation*}
No es difícil verificar que dicha transformación mapea la región: \begin{equation*} \left\{z=re^{i\theta}\in\mathbb{C}\setminus\{0\} : r\geq 0, \, 0\leq \theta \leq \frac{\pi}{n}\right\}, \end{equation*}en el semiplano superior del plano $w$.
Ejemplo 26.6. Consideremos a la región rectangular: \begin{equation*} S=\left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, 0\leq y\leq \pi\right\} \end{equation*}y determinemos su imagen bajo la transformación $f(z) = e^z$.
Solución. Fijemos a $x_0\in[-1,1]$ y consideremos al segmento de la recta vertical $x=x_0$ que está completamente contenido en $S$. Los puntos de dicho segmento son de la forma $z=x_0+iy$, con $0\leq y \leq \pi$. Para dichos puntos, por la proposición 20.2, tenemos que: \begin{equation*} w = f(z) = e^{x_0+iy} = e^{x_0} e^{iy} = e^{x_0}\left[\operatorname{cos}(y) + i \operatorname{sen}(y)\right], \quad 0\leq y \leq \pi, \end{equation*}de donde se sigue que los puntos $w=e^{x_0}\operatorname{cis}(y)$ tienen módulo $e^{x_0}$ y argumento principal $y$.
Notemos que los puntos $w=f(z)$ están sobre la circunferencia de radio $e^{x_0}$ y centro en el origen. Más aún, como $y\in[0,\pi]$, entonces dichos puntos trazan la semicircunferencia ubicada en el semiplano superior del plano $w$.
Dado que $x_0\in[-1,1]$, entonces $e^{-1}<e^1$, por lo que, los segmentos de las rectas verticales $x=x_0$, contenidos en $S$, corresponden con circunferencias de radio creciente y en conjunto forman la región anular delimitada por las semicircunferencias de radio $e^{-1}$ y $e^1$, respectivamente, amabas centradas en el origen.
De manera análoga, podemos verificar que bajo la transformación $f(z)=e^z$, la región rectangular: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, -\pi\leq y\leq 0\right\}, \end{equation*}es mapeada en la región anular delimitada por las mismas semicircunferencias de radio $e^{-1}$ y $e^1$, con centro en el origen, ubicada en el semiplano inferior del plano $w$.
En general, si consideramos a la región fundamental de la exponencial, figura 78 entrada 20, es decir, la banda infinita: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -\infty <x<\infty, -\pi< y < \pi\right\}, \end{equation*}entonces, dicho conjunto es mapeado bajo la transformación $f(z)=e^z$ en el conjunto: \begin{equation*} \mathbb{C}\setminus{L_{-\pi}} = \left\{z\in\mathbb{C} : |z|>0, -\pi< \operatorname{Arg}(z) < \pi\right\}, \end{equation*}ya que $\lim\limits_{x\to-\infty} e^x =0$ y $\lim\limits_{x\to\infty} e^x = \infty$.
Ejemplo 26.7. Sean $0<a<b$ y $0\leq \theta_1 <\theta_2 \leq \pi$. Determinemos la imagen de la región circular: \begin{equation*} S = \left\{z\in\mathbb{C} : a \leq |z| \leq b,\,\, \theta_1 \leq \operatorname{Arg}(z) \leq \theta_2\right\}, \end{equation*}bajo la transformación $\operatorname{Log}(z)$.
Solución. Notemos que la región $S$ está delimitada por las semirrectas que parten del origen y se forman por los ángulos $0\leq\theta_1$, $\theta_2\leq\pi$ y por los arcos de circunferencia de radio $a$ y $b$ con centro en el origen, como se puede ver en el siguiente applet de GeoGebra https://www.geogebra.org/m/qjzxhefv.
Consideremos a una semirrecta $L$ que parte del origen y está determinada por un ángulo $\theta$ tal que $\theta_1 \leq \theta \leq \theta_2$. Sea $z\in L \cap S$, entonces: \begin{align*} \operatorname{Log}(z) & = \operatorname{ln}|z| +i \operatorname{Arg}(z)\\ & = \operatorname{ln}|\,z\,| +i \theta. \end{align*}
Dado que $0<a\leq |\,z\,| \leq b$, tenemos que $\operatorname{ln}(a) \leq \operatorname{ln}|\,z\,| \leq \operatorname{ln}(b)$, por lo que los puntos $w=\operatorname{Log}(z)$ describen el segmento de la recta horizontal: \begin{equation*} w=u+iv, \quad \operatorname{ln}(a) \leq u \leq \operatorname{ln}(b), \quad v=\theta. \end{equation*}
Como $v\in[\theta_1, \theta_2]$, entonces el segmento de la semirrecta $L$, que está completamente contenido en $S$, cubre a $S$ conforme $v$ varía, por lo que bajo $f$ dicho segmento cubre a la región rectangular en el plano $w$ determinada por los vértices $\left(\operatorname{ln}(a), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_2\right)$ y $\left(\operatorname{ln}(a), \theta_2\right)$.
Observación 26.5. De acuerdo con los ejemplos 26.6 y 26.7, geométricamente debe ser claro que las funciones $\operatorname{Log}(z)$ y $e^z$ biyectan una región anular en una región rectangular y viceversa. Además, la frontera de la región anular es mapeada en la frontera de la región rectangular y viceversa.
Cerraremos esta entrada con el siguiente ejemplo correspondiente con la transformación trigonométrica $\operatorname{sen}(z)$. Por simplicidad consideraremos solo una parte de una banda infinita, pues para la parte restante el planteamiento es el mismo, sin embargo no deja de ser de suma importancia pues en conjunto nos permiten concluir que la función compleja $\operatorname{sen}(z)$ tiene como imagen a todo el plano complejo $\mathbb{C}$.
Ejemplo 26.8. Determinemos la imagen de la semibanda infinita: \begin{equation*} S = \left\{z=x+iy\in\mathbb{C} : -\frac{\pi}{2}\leq x\leq \frac{\pi}{2},\, y\geq 0\right\}, \end{equation*}bajo la transformación $f(z)=\operatorname{sen}(z)$.
Solución. De manera análoga a los ejemplos anteriores, procedemos a cubrir la región del dominio de $f$ con alguna curva simple que bajo $f$ nos permita cubrir la imagen de $S$ y así determinar dicho conjunto.
Sea $0\leq y_0 <\infty$ fijo. Consideramos el segmento de recta horizontal contenido en $S$ dado por: \begin{equation*} y=y_0, \quad -\frac{\pi}{2}\leq x\leq \frac{\pi}{2}. \end{equation*}
Sea $z=x+iy_0$ un punto sobre dicho segmento de recta, entonces, bajo $f$, por la proposición 22.1(10) tenemos que: \begin{align*} w=u+iv & = \operatorname{sen}(x+iy_0)\\ & = \operatorname{sen}(x) \operatorname{cosh}(y_0) + i \operatorname{cos}(x) \operatorname{senh}(y_0), \end{align*}de donde: \begin{equation*} u(x,y) = \operatorname{sen}(x) \operatorname{cosh}(y_0) \quad \text{y} \quad v(x,y) = \operatorname{cos}(x) \operatorname{senh}(y_0). \end{equation*}
Si $y_0=0$, tenemos que $\operatorname{cosh}(0)=1$ y $\operatorname{senh}(0)=0$, por lo que $v=0$ y $u=\operatorname{sen}(x)$, entonces la imagen del intervalo $\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, bajo $f(z)=\operatorname{sen}(z)$, es el intervalo $[-1,1]$.
Supongamos ahora que $y_0>0$. Tenemos que $\operatorname{cosh}(y_0)>0$ y $\operatorname{senh}(y_0)>0$, por lo que: \begin{equation*} \operatorname{sen}(x) = \frac{u}{\operatorname{cosh}(y_0)} \quad \text{y} \quad \operatorname{cos}(x) = \frac{v}{\operatorname{senh}(y_0)} \tag{26.3}. \end{equation*}
Para $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$ tenemos que $\operatorname{cos}(x)\leq 0$, por lo que $v\geq 0$.
Elevando al cuadrado ambas igualdades en (26.3) y sumándolas tenemos que: \begin{equation*} 1 = \operatorname{sen}^2(x) + \operatorname{cos}^2(x) = \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2. \tag{26.4} \end{equation*}
De acuerdo con (26.4), como $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, entonces los puntos $w=u+iv$ trazan la semielipse superior: \begin{equation*} \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2 = 1, \quad v\geq 0. \end{equation*}
Los puntos de intersección de dicha semielipse con el eje real $u$ son $\left(\pm\operatorname{cosh}(y_0), 0\right)$, mientras que el punto intersección con el eje imaginario $v$ es $\left(0,\operatorname{senh}(y_0)\right)$.
Dado que: \begin{align*} \lim\limits_{y_0\to\infty} \operatorname{senh}(y_0) = \infty, &\quad \lim\limits_{y_0\to\infty} \operatorname{cosh}(y_0) = \infty,\\ \lim\limits_{y_0\to 0 } \operatorname{senh}(y_0) =0, &\quad \lim\limits_{y_0\to 0} \operatorname{cosh}(y_0) = 1, \end{align*}y $y_0\in(0,\infty)$, entonces la imagen de las semielipses se encuentra en el semiplano superior $v\geq 0$, del plano $w$, incluyendo el eje real $u$.
Se puede verificar fácilmente, ejercicio 5, que la frontera de $S$ es mapeada en la frontera de $f(S)$, correspondiente con el eje real $u$.
Determina la imagen $f(S)$ bajo la transformación lineal dada. a) $f(z) = 4z$ y $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$. b) $f(z) = iz+i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0 \right\}$. c) $f(z) = -z+2i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $f(z) = iz+2$ y $S=\left\{ z\in\mathbb{C} : |z|\leq 2, 0\leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Sea $f(z)=\dfrac{1}{z}$ la transformación inversión. Para cada conjunto $S$ determina su imagen $f(S)$. a) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 1 \right\}$. b) $S=\left\{ z\in\mathbb{C} : |z|\geq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 3, \dfrac{\pi}{3}\leq \operatorname{Arg}(z)\leq \dfrac{2\pi}{3} \right\}$. d) $S=\left\{ z\in\mathbb{C} : z\neq 0, 0 \leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Encuentra la imagen de $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$ bajo $f(z)=z+\overline{z}$.
Sea $f(z) = z^2$. Determina la imagen $f(S)$ de cada conjunto $S$. a) $S$ es el cuadrado con vértices $(0,0), (1,0), (1,1)$ y $(0,1)$. b) $S=\left\{ z\in\mathbb{C} : 0\leq \operatorname{Im}(z) \leq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $S=\left\{ z\in\mathbb{C} : -2 \leq \operatorname{Re}(z) \leq 0 \right\}$.
Sea $f(z) = \operatorname{sen}(z)$. a) Muestra que bajo $f$ la semirrecta $x=\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\geq 1$, $v = 0$. b) Muestra que bajo $f$ la semirrecta $x=-\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\leq -1$, $v = 0$. c) Concluye que la frontera del conjunto $S$ en el ejemplo 26.8 es mapeada en la drontera del conjunto $f(S)$. d) Sabemos que la elipse: \begin{equation*} \dfrac{x^2}{a^2} + \dfrac{y^2}{b^2} = 1, \end{equation*}con $0<b<a$, tiene focos en los puntos $\left(\pm \sqrt{a^2 – b^2}, 0\right)$. Muestra que todas las elipses del ejemplo 26.8 tienen los mismos focos en los puntos $(\pm 1,0)$.
Sea $S$ la semibanda horizontal: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : x\geq 0, -\frac{\pi}{2} \leq y \leq \frac{\pi}{2} \right\}. \end{equation*}Determina la imagen de $S$ bajo la función $f(z)=\operatorname{senh}(z)$.
Hint: Expresa a $\operatorname{senh}(z)$ en términos de $\operatorname{sen}(z)$.
Sea $w=\rho e^{i\phi}$. Muestra que la transformación $w=\dfrac{i}{z}$ mapea la hipérbola $x^2-y^2=1$ en la lemniscata $\rho^2 = 2 \operatorname{cos}(2\phi)$.
Determina una transformación que rote a la elipse $x^2+xy+y^2=2$, en el sentido de las manecillas del reloj, tal que su ecuación se reduzca a su forma canónica. Obtén la longitud de su semieje mayor y menor.
Hint: Supón que la transformación es de la forma $w=\rho e^{i\phi}$. Determina un ángulo $\alpha$ tal que el coeficiente de $uv$ en la imagen de la curva es cero.
Más adelante…
En esta entrada hemos abordado, a manera de ejemplos, el estudio de las funciones complejas como transformaciones del plano complejo, esto con el objetivo de dar una interpretación geométrica del comportamiento de las funciones complejas, ya que como mencionamos antes, visualizar la gráfica de tales funciones resulta imposible. Debe ser claro que la propuesta de esta entrada es solo una de las distintas alternativas conocidas para el estudio de la parte gráfica de una función compleja, sin embargo hay otras alternativas que pueden ser de utilidad para la comprensión del comportamiento geométrico de estas funciones, por lo que se recomienda consultar estas otras propuestas.
Con esta entrada finalizamos la segunda unidad del curso. En la siguiente entrada es la primera de la tercera unidad del curso, correspondiente con el tema de series de números complejos, en la cual estudiaremos algunos de los conceptos básicos así como algunas de las propiedades más importantes de estos objetos matemáticos, mediante los cuales probaremos una serie de resultados que serán de utilidad para caracterizar a las funciones complejas a través de dichos objetos.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
Una matriz es un objeto matemático que se compone de una colección ordenada de números, llamados elementos, dispuestos en filas y columnas. Las matrices se utilizan en numerosas áreas de las matemáticas, la física, la informática, la ingeniería y otras disciplinas para manipular y analizar datos, realizar cálculos y resolver problemas. Bajo las condiciones adecuadas las matrices se pueden sumar, multiplicar, transformar mediante operaciones matriciales, etc. para obtener información relevante. Las matrices también se utilizan en la representación de sistemas lineales de ecuaciones.
Ve el siguiente video:
Definición
Sean $n$ y $m$ naturales positivos y $K$ un conjunto. Una matriz $A$ con entradas en $K$ de $m$ renglones y $n$ columnas es una función:
Sean $n,m,r$ y $s$ naturales positivos y $K$ un conjunto. Sea $A$ una matriz $m\times n$ con entradas en $K$ y $B$ una matriz $r\times s$ con entradas en $K$.
Decimos que $A$ es igual a $B$ si:
$m=r,\,n=s$ y $A_{ij}=B_{ij}\,\,\, \forall i\in \set{1,\dotsc, n},\,\,\,\forall j\in \set{1,\dotsc, n}.$
Es decir dos matrices son iguales si tienen la misma cantidad de renglones, la misma cantidad de columnas, y coinciden entrada a entrada.
Definición
Sean $n$ y $m$ naturales positivos, $A$ y $B$ matrices $m\times n$ con entradas en $\mathbb R$. La suma de $A$ y $B$ es la matriz $A+B$ de $m\times n$ tal que $(A+B)_{ij}=A_{ij}+B_{ij}.$
Dado $\lambda\in \mathbb R$ el producto escalar de $\lambda$ por $A$ es la matriz $\lambda A$ de $m\times n$ tal que $(\lambda A)_{ij}=\lambda A_{ij}.$
Notación.
Dados $n$ y $m$ naturales positivos $\mathscr M_{m\times n}(\mathbb R)=\set{A\mid A\,\,es\,\,una\,\,matriz\,\,m\times n\,\,con\,\,entradas\,\,reales}.$
Vamos a probar las propiedades $1,3$ y $7$. Las demás se dejan al lector. Recuerda no confundir las operaciones entre matrices, con las operaciones en los números reales.
Sean $n$ y $m$ naturales positivos, $A,B,C\in \mathscr M_{m\times n}(\mathbb R),\,\,\lambda,\mu \in \mathbb R .$
Demostración de la propiedad $1$
Por demostrar que $(A+B)+C=A+(B+C).$
Como $A+B\in \mathscr M_{m\times n}(\mathbb R)$ y $C\in \mathscr M_{m\times n}(\mathbb R)$ entonces $(A+B)+C\in \mathscr M_{m\times n}(\mathbb R)$.
Como $A\in \mathscr M_{m\times n}(\mathbb R)$ y $B+C\in \mathscr M_{m\times n}(\mathbb R)$ entonces $A+(B+C)\in \mathscr M_{m\times n}(\mathbb R).$
Considera a $i \in \set{1,\dotsc,m},\,\, j \in \set{1,\dotsc,n}$
Explicación de las igualdades
$(A+(B+C))_{ij}=$
Partimos de un elemento arbitrario $ij$ de la matriz $A+(B+C).$
$=A_{ij}+(B+C)_{ij}$
Por definición de suma de matrices.
$=A_{ij}+(B_{ij}+C_{ij})$
Por definición de suma de matrices.
$=(A_{ij}+B_{ij})+C_{ij}$
Por asociatividad en $\mathbb R.$
$=(A+B)_{ij}+C_{ij}$
Por definición de suma de matrices.
$=((A+B)+C)_{ij}$
Por definición de suma de matrices.
Por lo tanto $A+(B+C)$ y $(A+B)+C$ son matrices del mismo tamaño y para toda $i$ y para toda $j$ tenemos que $(A+(B+C))_{ij}=((A+B)+C)_{ij}$. Así, $A+(B+C)=(A+B)+C.$
Demostración de la propiedad $3$
Sea $\theta\in \mathscr M_{m\times n}(\mathbb R)$ tal que $\theta_{ij}=0\,\,\forall i,j$. Sea $A\in \mathscr M_{m\times n}(\mathbb R).$
Por demostrar que $A+\theta=\theta +A=A.$
Sabemos que $A+\theta\in \mathscr M_{m\times n}(\mathbb R)$. Sean $i \in \set{1,\dotsc,m},\,\, j \in \set{1,\dotsc,n}.$
Explicación de las igualdades
$(A+\theta)_{ij}=$
Partimos de un elemento arbitrario $ij$ de la matriz $A+\theta .$
$=A_{ij}+\theta_{ij}$
Por definición de suma de matrices.
$=A_{ij}+0$
Por definición de $\theta$: $\theta_{ij}=0,\,\,\,\forall i,j.$
$=A_{ij}$
$0$ es el neutro en $\mathbb R .$
Por lo tanto $A+\theta$ y $A$ son matrices del mismo tamaño y para toda $i$ y para toda $j$ tenemos que $(A+\theta)_{ij}=A_{ij}$. Así, $A+\theta=A$. Análogamente $\theta +A=A.$
Demostración de la propiedad $7$
Por demostrar que $(\lambda+\mu)A=\lambda A+\mu A.$
Sabemos que $(\lambda+\mu)A\in \mathscr M_{m\times n}(\mathbb R)$. También $\lambda A\in \mathscr M_{m\times n}(\mathbb R)$ y $\mu A\in \mathscr M_{m\times n}(\mathbb R)$ por lo que $\lambda A+\mu A\in \mathscr M_{m\times n}(\mathbb R)$. Sean $i \in \set{1,\dotsc,m},\,\, j \in \set{1,\dotsc,n}.$
Explicación de las igualdades
$((\lambda+\mu)A)_{ij}=$
Partimos un elemento arbitrario $ij$ de la matriz $(\lambda+\mu)A.$
$=(\lambda+\mu)A_{ij}$
Por definición del producto por escalar de matrices.
$=\lambda A_{ij}+\mu A_{ij}$
Por la distributividad en $\mathbb R.$
$=(\lambda A)_{ij}+(\mu A)_{ij}$
Por definición del producto por escalar de matrices.
$=(\lambda A+\mu A)_{ij}$
Por definición de suma de matrices.
Por lo tanto $(\lambda+\mu)A$ y $\lambda A+\mu A$ son matrices del mismo tamaño y para toda $i$ y para toda $j$ tenemos que $((\lambda+\mu)A)_{ij}=(\lambda A+\mu A)_{ij}$. Así, $(\lambda+\mu)A=\lambda A+\mu A.$
$\square$
Observa que $\mathscr M_{m\times n}(\mathbb R)$ cumple entonces propiedades análogas a las que cumple $\mathbb R^n$ con las operaciones de suma y producto por escalar. Debido a ello se le llama también un $\mathbb R$-espacio vectorial.
Se cumplen diversas propiedades que se desprenden de las anteriores, cuya pruebas son análogas a las que se realizaron en la unidad anterior para $\mathbb R^n$, como por ejemplo:
El neutro aditivo $\theta$ es único y es la matriz de ceros.La prueba de la unicidad se deja de tarea moral.
El inverso aditivo de $A$ es único y es $(-1)A$, se denota por $-A$. Esta prueba se deja de tarea moral.
$iii)$ Expresa al primer renglón de $A$ como una matriz renglón y a la tercera columna de $A$ como una matriz columna, indicando en cada caso el tamaño de ambas matrices.
Obtén $-7A+B$ y encuentra la matriz $X$ tal que $\frac{1}{5}B+4X=-A.$
$3.$ Compara las propiedades de suma y producto por escalar de matrices con las de $\mathbb R^n.$
$4.$ Sean $n$ y $m$ naturales positivos. Prueba que el neutro aditivo de $\mathscr M_{m\times n}(\mathbb R)$ es único.
$5.$ Sean $n$ y $m$ naturales positivos. Prueba que cada $A\in \mathscr M_{m\times n}(\mathbb R)$ tiene un único inverso aditivo.
$6.$ Sean $n$ y $m$ naturales positivos,. Sean $A,B,C \in \mathscr M_{m\times n}(\mathbb R)$ y $\lambda\in \mathbb R$. Prueba o da un contraejemplo para las siguientes afirmaciones.
$i)$ Si $A+C=B+C$, entonces $A=B.$
$ii)$ Si $\lambda A$ es la matriz nula, entonces $\lambda=0.$
$iii)$ Si $\lambda A=A$, entonces $\lambda=1.$
$iv)$ $(-1)A$ es el inverso aditivo de $A.$
$7.$ Sean $n$ y $m$ naturales positivos y $A \in \mathscr M_{m\times n}(\mathbb R)$. Sea $t\in \mathbb N$. ¿Podremos sumar $A$ $t$ veces, sin importar qué tan grande sea $t$?, ¿podremos sumar $A$ una infinidad de veces?
Más adelante
En la siguiente nota definiremos la multiplicación de matrices, así como la matriz identidad, las matrices inversas y las transpuestas.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
En la presente entrada entenderemos lo que es la dimensión de un espacio vectorial. Ésta será la cardinalidad de cualquiera de sus bases y estará bien definida ya que como hemos visto todas las bases tienen la misma cantidad de elementos. Así como podemos completar un conjunto linealmente independiente de $V$ agregando vectores hasta obtener una base de $V$, también podemos, a partir de un conjunto generador $\gamma$ de $V$, obtener una base de $V$ quitando vectores.
Definición
Sea $V$ un subespacio de $\mathbb R^n$. La dimensión de $V$ es la cardinalidad de cualquiera de sus bases.
Notación: $dim_{\mathbb R}V$ o simplemente $dim\,\,V$.
Ejemplos
1. $dim\,\,\mathbb R^n=n$ ya que $\set{e_1,\dotsc,e_n}$ es una base de $\mathbb R^n$.
2. Considera el subespacio de $\mathbb R^2$ dado por $V =\set{(x,y)\in \mathbb R^2\mid x+3y=0}.$ Notemos que
Así, $\set{(-3,1)}$ genera a $V$. Se deja al lector verificar que además $\set{(-3,1)}$ es $l.i$, entonces es una base de $V$. Por lo tanto $dim\,\,V=1.$
3. Considera el subespacio de $\mathbb R^4$ dado por $W =\set{(x,y,z,w)\in \mathbb R^4\mid 3x+2y-z+4w=0}.$ Observemos que
Así, $\big\{ \left(-\frac{2}{3},1,0,0\right), \left(\frac{1}{3},0,1,0\right), \left(-\frac{4}{3},0,0,1\right) \big\}$ genera a $W$. Se deja al lector verificar que además $\big\{ \left(-\frac{2}{3},1,0,0\right), \left(\frac{1}{3},0,1,0\right), \left(-\frac{4}{3},0,0,1\right) \big\}$ es $l.i$, entonces es una base de $W$ y por lo tanto $dim\,\,W=3.$
Lema
Sea $V$ un subespacio de $\mathbb R^n$, $m$ un natural positivo y $v_1,\dotsc,v_m\in V$ vectores distintos tales que $\set{v_1,\dotsc,v_m}$ es $l.d.$ Entonces existe $v_j\in \set{v_1,\dotsc,v_m}$ tal que $\langle v_1,\dotsc,v_j,\dotsc, v_m \rangle=\langle v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \rangle.$
Demostración
Sean $V\leq \mathbb R^n$, $m$ un natural positivo y $v_1,\dotsc,v_m\in V$ distintos tales que $\set{v_1,\dotsc,v_m}$ es $l.d.$ Existen entonces $\lambda_1,\dotsc,\lambda_m\in \mathbb R$ no todos nulos tales que:
$\lambda_1 v_1+\cdots+\lambda_m v_m=\bar{0}.$
Como $\lambda_1,\dotsc,\lambda_m$ no son todos nulos, podemos considerar $j\in\{1,2,\dots, m\}$ tal que $\lambda_j\neq 0$. Así:
Entonces $w$ es una combinación lineal del conjunto $\set{v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m}$ y por lo tanto $w\in \langle v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \rangle$, probando con ello que $ \langle v_1,\dotsc,v_j,\dotsc, v_m \rangle \subseteq \langle v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \rangle .$ Así, tenemos la igualdad buscada:
Sea $V$ un subespacio de $\mathbb R^n$. Todo conjunto generador finito de $V$ se puede reducir a una base de $V$, es decir, si $S$ es un conjunto generador finito de $V$, existe $\beta\subseteq S$ tal que $\beta$ es una base de $V$.
Demostración
Sea $V\leq \mathbb R^n$, $m$ un natural positivo y $v_1,\dotsc,v_m\in V$ distintos tales que $S=\set{v_1,\dotsc,v_m}$ genera a $V$.
Si $S$ es $l.i.$, entonces es una base de $V$.
Si $S$ es $l.d.$, por el lema existe $v_j\in S$ tal que $\langle v_1,\dotsc,v_j,\dotsc, v_m \rangle=\langle v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \rangle=V.$
Si $\{ v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \}$ es $l.i.$, entonces es una base de $V$.
Si $\{ v_1,\dotsc,v_{j-1},v_{j+1},\dotsc, v_m \}$ es $l.d.$ continuamos con este procedimiento (usando el lema) hasta obtener un subconjunto $\beta$ de $\set{v_1,\dotsc,v_m}$ $l.i.$ y tal que $\langle \beta \rangle=V$. $\beta$ será entonces una base de $V$ contenida en $S$.
$\square$
Corolario
Sean $m\in \mathbb N$ y $V$ un subespacio de $\mathbb R^n$ de dimensión $m$. Tenemos que:
$a)$ Cualquier conjunto generador de $V$ con $m$ elementos es una base de $V$.
$b)$ Cualquier conjunto linealmente independiente en $V$ con $m$ elementos es una base de $V$.
Demostración
La demostración se deja como tarea moral.
Teorema
Sean $V$ y $W$ subespacios de $\mathbb R^n$ con $W\subseteq V$.
$a)$ Toda base de $W$ se puede completar a una base de $V.$
$b)$ $dim\, W\leq dim\, V.$
$c)$ Si $dim\, W=dim\,V$, entonces $W=V.$
Demostración
Demostración de $a)$
Se deja al lector realizar la demostración adaptando el procedimiento mediante el que se probó que todo subespacio de $\mathbb R^n$ tiene una base en la nota anterior.
Demostración de $b)$
Sean $\gamma$ una base de $W$ y $\beta$ una base de $V$. Como $\gamma$ es $l.i.$ en $V$ y $\beta$ es un generador de $V$ por la una nota en la entrada anterior se tiene que $dim\,W=\#\gamma\leq \#\beta=dim\,V.$
Demostración de $c)$
Supongamos que $dim\, W=dim\,V=m.$
Sea $\gamma$ una base de $W$. Sabemos que $\gamma$ es $l.i.$ en $V$ con $dim\,W=m$. Por el corolario anterior $\gamma$ es una base de $V$ y entonces $W=\langle \gamma \rangle=V$.
$\square$
Tarea Moral
$1.$ Considera al espacio vectorial $\mathbb R^3$ sobre el campo de los reales y al subespacio: