(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
En esta entrada repasaremos lo que vimos en la entrada anterior. Primero, veremos unos ejemplos que ilustran las definiciones de órbita y estabilizadores. A partir de estos ejemplos podremos observar ciertos patrones que se repiten y los analizaremos formalmente en una proposición. Por último, daremos un último ejemplo para ilustrar dicha proposición.
Ejemplos de Acciones
Repasemos lo que hemos visto con los siguientes ejemplos. En cada ejemplo describimos el grupo $G$, la órbita y los estabilizadores de los elementos.
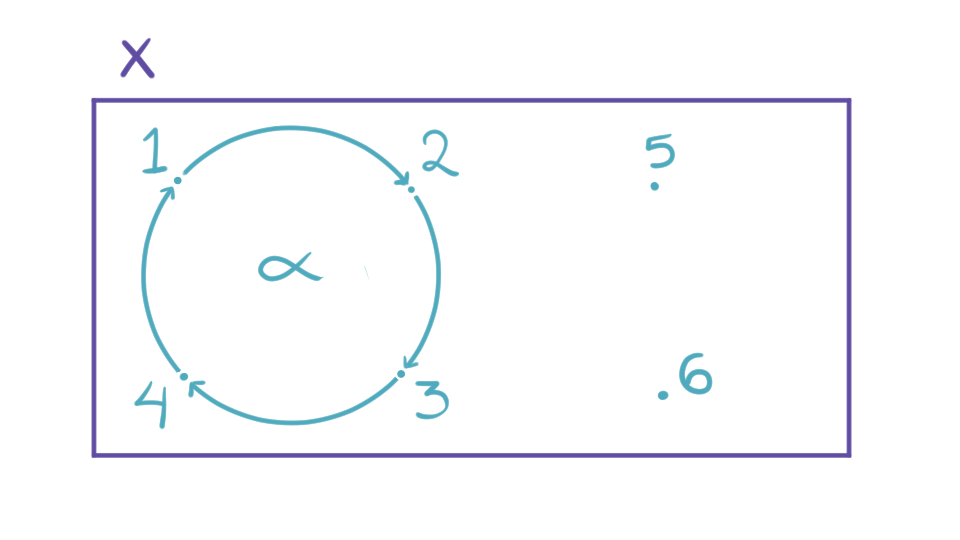
Ejemplo 1. Consideremos la permutación $\alpha = (1\,2\,3\,4) \in S_6$. Sean $G = \left<\alpha\right>$ y $X = \{1,2,3,4,5,6\}$ con la acción dada por $\alpha^k \cdot i = \alpha^k(i)$ para toda $k\in \z, i\in X.$
Este diagrama nos ayuda a entender cómo funciona $\alpha$ y qué sucede cuando aplicamos $\alpha^2$, $\alpha^3$, $\dots$. Los elementos del círculo van cambiando en el orden indicado por las flechas. Además, $\alpha$ deja fijos al 5 y al 6.
Comencemos describiendo a las órbitas de los elementos: \begin{align*} \mathcal{O}(1) &= \{1,2,3,4\}\\ &= \mathcal{O}(2) = \mathcal{O}(3) = \mathcal{O}(4)\\ \mathcal{O}(5) &= \{5\}\\ \mathcal{O}(6) &= \{6\}. \end{align*}
Observemos que las órbitas de $1, 2, 3$ y $4$ son iguales porque $\alpha$ es una permutación cíclica que mueve esos elementos, pero como $\alpha$ deja fijos a $5$ y a $6,$ sus órbitas son distintas y consisten solamente de sí mismos.
Ahora, podemos describir mejor a $G = \left< \alpha \right>$. Como $\alpha$ tiene orden 4, $G$ quedaría:
$$G = \{(1), \alpha, \alpha^2,\alpha^3\}.$$
Por último, describamos los estabilizadores. De acuerdo a la definición de la entrada previa el estabilizador de un objeto son los elementos del grupo que fijan al objeto, en este caso las potencias de $\alpha$ que dejan fijo al objeto. En el caso del $1$ la única potencia de $\alpha$ que lo fija es la identidad y análogamente para $2,3$ y $4$. Por otro lado en el caso de $5$ y $6$, como $\alpha$ no los mueve en absoluto, cualquier potencia de $\alpha$ forma parte de sus respectivos estabilizadores. Esto quedaría escrito de la siguiente manera: \begin{align*} G_1 &= \{\alpha^k \in G | \alpha^k \cdot 1 = 1\} = \{(1)\}\\ &= G_2 = G_3 = G_4. \\\\ G_5 &= \{\alpha^k \in G | \alpha^k \cdot 5 = 5\} = G = \{(1), \alpha, \alpha^2,\alpha^3\} \\&= \{\alpha^k \in G | \alpha^k \cdot 6 = 6\}\\ &= G_6. \end{align*}
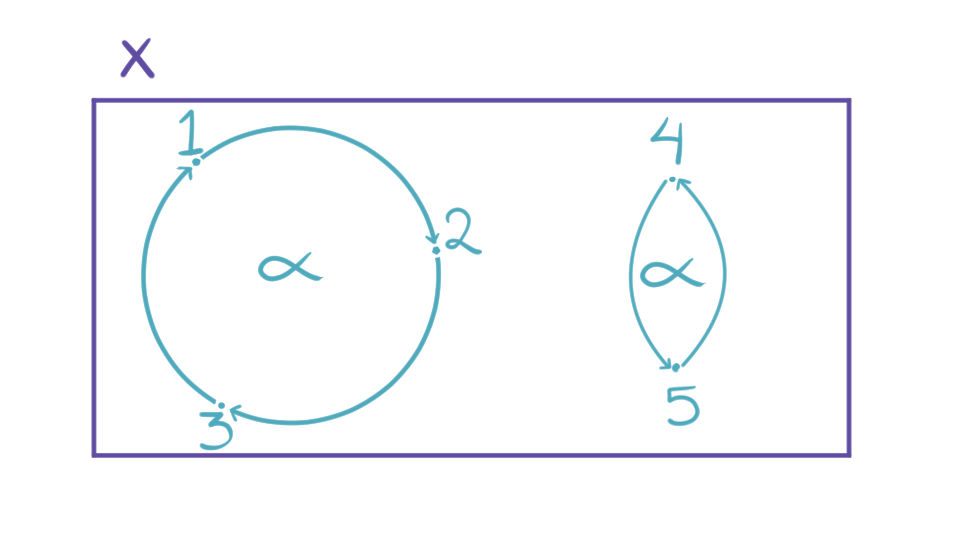
Ejemplo 2. Consideremos ahora la permutación $\beta = (1\,2\,3)(4\,5)\in S_5$. Sean $G = \left< \beta \right>$ y $X= \{1,2,3,4,5\}$ con la acción dada por $\beta^k \cdot i = \beta^k(i)$ para todas $k\in\z$ y $i\in X.$
Este diagrama ilustra el efecto de $\beta$ en los elementos de $X$. Podemos ver como $1, 2$ y $3$ forman un ciclo y, $4$ y $5$ forman otro.
Primero, describamos las órbitas de los elementos:
Ahora, describamos mejor a $G$. Observemos que $\beta$ está compuesta por dos ciclos disjuntos: $(1\, 2\, 3)$ con orden $3$ y $(4\,5)$ con orden $2$, es decir es el producto de dos ciclos que conmutan y que tienen órdenes primos relativos entre sí. Por el último teorema de la entrada Palabras, el orden de $\beta$ es entonces $6$. Así, $G$ quedaría descrito como: $$G = \{(1), \beta, \beta^2, \beta^3, \beta^4,\beta^5\}.$$
Por último, describamos los estabilizadores de cada elemento.
Antes de avanzar a la siguiente sección, considera los ejemplos estudiados e intenta determinar si existe alguna relación entre $\#\mathcal{O}(x)$, $|G_x|$ y $|G|$.
¿Qué relación existe entre el tamaño de la órbita y el tamaño del estabilizador de un elemento?
Los ejemplos que trabajamos al inicio de esta entrada nos pueden dar la idea de que existe algún tipo de relación entre los tamaños de la órbita y del estabilizador para cada elemento.
Proposición. Sean $G$ un grupo, $X$ un $G$-conjunto y $x\in X$. \begin{align*} \#\mathcal{O}(x) = [ G:G_x]. \end{align*}
Demostración. Sea $G$ un grupo, $X$ un $G$-conjunto y $x\in X$. Dado que $[ G:G_x]=\# \{gG_x| g\in G\}$ bastaría con encontrar una biyección entre $\mathcal{O}(x)$ y $\{gG_x| g\in G\}.$ Proponemos $\varphi : \mathcal{O}(x) \to \{gG_x| g\in G\}$ tal que $g\cdot x \to g G_x$ para todo $g\in G.$
Debemos probar que $\varphi$ es una biyección.
Primero, veamos que está bien definida. Tomemos $g,h\in G$, y supongamos que $g\cdot x = h\cdot x$.
Multiplicamos ambos lados por $h^{-1}$. Esto queda, \begin{align}\label{ec1} h^{-1}\cdot (g\cdot x) &= h^{-1}\cdot (h\cdot x). \end{align}
Por las propiedades de acción, al desarrollar la parte derecha de la igualdad \ref{ec1} obtenemos \begin{align*} h^{-1}\cdot (h\cdot x) &= (h^{-1}h)\cdot x\\ &= e\cdot x = x. \end{align*}
Por otro lado al desarrollar la parte izquierda de la igualdad \ref{ec1} obtenemos que, \begin{align*} h^{-1}\cdot(g\cdot x) = (h^{-1}g)\cdot x. \end{align*}
Así, $ (h^{-1}g)\cdot x=x$ y esto por definición quiere decir que $h^{-1}g\in G_x$. Por lo que estudiamos en clases laterales, esto implica que $gG_x = hG_x$, es decir que $\varphi(g\cdot x)=\varphi(h\cdot x)$. Así, concluimos que $\varphi$ está bien definida.
Ahora, probaremos que $\varphi$ es inyectiva. Sean $g, h \in G$, tales que $\varphi(g\cdot x) = \varphi(h\cdot x)$, es decir tales que $g G_x = hG_x.$ Pero \begin{align*} g G_x &= hG_x\\ \Rightarrow &h^{-1} g\in G_x &\text{Por lo que sabemos de clases laterales}\\ \Rightarrow &(h^{-1}g)\cdot x = x & \text{Por estar en el estabilizador}\\ \Rightarrow &h\cdot ((h^{-1}g)\cdot x) = h\cdot x. &\text{Haciendo actuar $h$}\\ \Rightarrow &g\cdot x=((hh^{-1})g)\cdot x =(h(h^{-1}g))\cdot x =h\cdot ((h^{-1}g)\cdot x) = h\cdot x. &\text{Por las propiedades de acción.}\\ \end{align*}
Así $\varphi$ es inyectiva.
Por construcción podemos observar que $\varphi$ es suprayectiva.
Por lo tanto $\#\mathcal{O} = [ G:G_x]$.
$\blacksquare$
Como consecuencia de lo anterior obtenemos el siguiente corolario.
Corolario. Sean $G$ un grupo finito, $X$ un $G$-conjunto y $x\in X.$ Entonces, $\# \mathcal{O}(x)$ divide a $|G|.$
Ejemplo del Dodecaedro
Veamos un ejemplo en el que apliquemos lo que acabamos de ver.
Consideremos el dodecaedro $D$.
Si pensamos en todas las simetrías en $\r^3$ que mandan el dodecaedro en sí mismo, podemos tomar las rotaciones y así definir $G = \{\varphi \text{ rotación en }\r^3 | \varphi[D]= D\}$.
¿Cuál es el orden de $G$?
Sea $X$ el conjunto de caras de $D$. Entonces, $G$ actúa en $X$ ya que manda caras de $D$ en caras de $D$. La acción es transitiva ya que cada cara se puede llevar a cualquier cara contigua mediante una rotación de $\displaystyle\frac{2\pi}{3}.$
Si el eje de rotación va del origen a un vértice, las caras rotarán tomando el lugar de otras caras. En cambio, si el eje de rotación cruza del origen al centro de una cara, esa cara rotará sobre sí misma y cada que rote $\displaystyle r = \frac{2\pi}{5}$ seguirá en su lugar.
Rotación de $\frac{2\pi}{5}$ del dodecaedro cuando el eje pasa por el centro de una cara. Las caras superiores e inferiores rotan sobre sí mismo.
Rotación de $\frac{2\pi}{3}$ del dodecaedro cuando el eje pasa por un vértice.
Así, dado $x\in X$, habrá exactamente cinco rotaciones que mandan la cara $x$ en sí misma (aquellas rotaciones de ángulo $ \frac{2\pi}{5}$ cuyo eje de rotación cruza del origen al centro de una cara), por lo cual $|G_x| = 5$. Además, como la acción es transitiva $\# X = \#\mathcal{O}(x)$. Luego, $\#X = 12$ y $\#\mathcal{O}(x) = [G:G_x ]$. Pero $\displaystyle [G:G_x ] = \frac{|G|}{5}$. Si juntamos todo eso, obtenemos: $$12 = \# X = \#\mathcal{O}(x) = [G:G_x ]= \frac{|G|}{5}.$$
Despejando, $|G| = 12\cdot 5 = 60.$ Es decir, tenemos 60 rotaciones en $\r^3$ que son simetrías del dodecaedro.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Sea $G$ un grupo finito actuando sobre sí mismo:
Determina si el hecho de que exista $x\in G$ y tal que $G_x =\{e\}$ implica que la acción es transitiva.
Determina si el hecho de que la acción sea transitiva implica que exista $x\in G$ tal que $G_x =\{e\}$.
Encuentra el orden del grupo de simetrías de cada sólido platónico (recuerda que hay algunos que son duales y por lo tanto tienen el mismo grupo de simetrías).
Más adelante…
Ya casi acabamos de estudiar la órbita, todavía nos queda analizar con más detalle el caso cuando $X=G$, es decir cuando $G$ actúa sobre sí mismo. También podemos preguntarnos qué sucede con el conjunto de elementos de $X$ que se quedan fijos ante cualquier elemento de $G$ que actúe sobre ellos. Esto nos servirá para llegar a una importante ecuación llamada la ecuación de clase.
Además, en la siguiente entrada definiremos un nuevo tipo de grupo conocido como $p$-grupo y esto nos perfilará para llegar a los Teoremas de Sylow.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
Tomemos un grupo $G$ y $X$ un $G$-conjunto. A lo largo de esta entrada consideraremos la relación de equivalencia en $X$ inducida por esta acción y que fue definida en la entrada anterior de la siguiente manera:
$x\sim y$ si y sólo si $g\cdot x = y$ para algún $g\in G$.
Continuemos entonces con esta idea, comenzando por definir las clases de equivalencia inducidas por esa relación.
Después, definiremos nuevos tipos de acciones, por ejemplo, ¿qué pasa si la relación sólo induce una clase de equivalencia? o ¿qué sucede con el conjunto de objetos que dejan fijo a los elementos de $G$?
Órbita de un elemento de $X$
Dada la importancia de esta manera de relacionar a los elementos de un grupo de acuerdo a una acción, daremos un nombre a sus clases de equivalencia.
Definición. Sean $G$ un grupo y $X$ un $G$-conjunto. Para cada $x\in X$, la órbita de $x$ es \begin{align*} \mathcal{O}(x) = \{g\cdot x | g \in G\}. \end{align*}
Es decir, todos los objetos que podemos obtener haciendo actuar a $G$ sobre $x$.
Observación. Sean $G$ un grupo y $X$ un $G$-conjunto. Tenemos que $\mathcal{O}(x)$ es la clase de equivalencia de $x$ con respecto a la relación inducida por la acción de $G$ en $X$.
Demostración. Sea $x\in G$. Sabemos que la clase de equivalencia de $x$, denotada por $[x]$, se define como: \begin{align*} [ x ] &= \{y\in X |x\sim y\} &\text{Definición de clase de equivalencia} \\ &= \{y\in X|\exists g\in G \text{ con }g\cdot x = y\} &\text{Definición de la relación }\sim\\ &= \{g\cdot x| g\in G\} = \mathcal{O}(x) &\text{Definición de órbita.} \end{align*}
$\blacksquare$
De cursos anteriores sabemos que la colección de clases de equivalencia inducidas por una relación es una partición del conjunto. El siguiente teorema se da como consecuencia de las propiedades de una partición.
Teorema. Sean $G$ un grupo y $X$ un $G$-conjunto. Entonces
$\mathcal{O}(x) \neq \emptyset $ para toda $x\in X$.
Sean $x,y\in X$. Si $\mathcal{O}(x)\cap \mathcal{O}(y)\neq \emptyset$, entonces $\mathcal{O}(x) = \mathcal{O}(y)$.
$\displaystyle X = \bigcup_{x\in X}\mathcal{O}(x)$.
Este teorema sólo enlista las propiedades de una partición en el caso particular en el que estamos trabajando, por lo que no hay nada nuevo que demostrar.
Una acción transitiva
Las órbitas están determinadas por varios factores: el conjunto $X$, el grupo $G$ y la acción de $G$ en $X$. En algunos casos existe una única órbita.
Definición. Sean $G$ un grupo y $X$ un $G$-conjunto. Si $\mathcal{O}(x) = X$ para alguna $x\in X$, decimos que la acción es transitiva.
Esta definición nos dice que podemos obtener cualesquier elemento de $X$ haciendo actuar algún elemento del grupo en el objeto $x$.
Ejemplos de acciones transitivas
Ejemplo 1. Dado $G$ un grupo, $X=G$ definimos la acción de $G$ en sí mismo mediante la operación de $G$, es decir $a\cdot x = a x$ para todas $a\in G$, $x\in X.$
Consideremos cualquier $x\in X$. Sea $y\in X$. Siempre tenemos una manera de obtener $y$ a través de $x$: \begin{align*} y &= y(x^{-1}x) \\ &= (yx^{-1})x \\ &= (yx^{-1}) &\text{Pues } x \in\mathcal{O}(x). \end{align*}
Entonces, $y \in \mathcal{O}(x)$.
Por lo tanto $\mathcal{O}(x) = X$ y así la acción es transitiva.
Ejemplo 2. Sean $G$ un grupo, $H\leq G$ y $X = \{gH | g\in G\}$. Definimos $a\cdot (gH) = agH$ para todas $a,g\in G.$
Consideremos cualquier $gH \in X.$ Sea $tH \in X$ con $t\in G.$ Podemos reescribir al representante como: \begin{align*} t H &= t(g^{-1}g) H = (tg^{-1})gH \\ &= (tg^{-1})\cdot gH \in \mathcal{O}(gH). \end{align*}
Por lo tanto $\mathcal{O}(gH) = X$. Así, la acción es transitiva.
Ejemplo 3. Sean $G = D_{2(n)}$ el grupo diédrico y $X = \{1,2,\cdots, n\}$ los distintos vértices del polígono regular de $n$ lados.
La acción que ya habíamos trabajado: dados $g\in G$, $i\in X$ definimos $g\cdot i = g(i)$.
Entonces $X = \{1,2,\cdots,n\}\subseteq \mathcal{O}(1) \subseteq X$. Así, $\mathcal{O}(1) = X$. Por lo tanto la acción es transitiva.
Ejemplo 4. Ahora veamos un ejemplo nuevo.
Sean $G$ un grupo y $X= G$. Dados $a\in G$, $x\in X$ definimos \begin{align*} a\cdot x &= a x a^{-1}. \end{align*}
Demostremos que es una acción: \begin{align*} e\cdot x &= exe^{-1} = x &\forall x\in X.\\ a\cdot(b\cdot x) &= a(b\cdot x)a^{-1} = a(bxb^{-1})a^{-1} = (ab)x(ab)^{-1}& \text{Asociando diferente}\\ &= (ab)\cdot x &\forall a,b\in G, \forall x\in X. \end{align*}
Así, $G$ actúa en sí mismo por conjugación.
Dado $x\in X$, \begin{align*} \mathcal{O}(x) = \{g\cdot x | g\in G\} = \{gxg^{-1}| g\in G\} \end{align*} que son todos los conjugados de $x$.
En este caso, la acción no siempre es transitiva: Si $ G\neq \{e\}$ consideremos $x\in G\setminus\{e\}.$ Si $e\in \mathcal{O}(x)$ entonces $e = g\cdot x = gxg^{-1}$ para algún $g\in G$ y entonces $e = x$. Esto es una contradicción porque $x\in G\setminus\{e\}$. Así, $\mathcal{O}(x)\neq X$ y la acción no es transitiva.
Más definiciones de acciones
En toda acción el neutro del grupo actúa de forma trivial en todos los elementos del conjunto pero puede ser que existan otros elementos del grupo con esa propiedad. Si no es el caso decimos que la acción es fiel.
Definición. Sean $G$ un grupo y $X$ un $G$-conjunto. Decimos que la acción es fiel si $g\cdot x = x,$ con $g\in G,$ para todo $x\in X,$ implica que $g=e.$
Consideremos ahora los elementos del grupo que fijan a algún elemento específico del conjunto:
Definición. Sean $G$ un grupo y $X$ un $G$-conjunto, $x\in X$. El estabilizador de $x$ es \begin{align*} G_x = \{g\in G | g\cdot x = x\}. \end{align*}
Es decir, la colección de todos los elementos de $G$ que dejan fijo a $x$.
Ejemplos de acción fiel y estabilizador
Ejemplo 1. Sean $G$ un grupo, $X = G$ y $g\cdot x = gx$ para todo $g,x \in G.$
Si $g\in G$ es tal que $g\cdot x = x$ para toda $x\in X$, entonces $gx = x$ para toda $x\in X$, en particular $g = ge = e.$
Así $g=e$ y la acción es fiel.
Dado $x\in X$, \begin{align*} G_x = \{g\in G | g\cdot x = x\} = \{g\in X| gx = x\}. \end{align*}
Pero si $gx = x$,por cancelación $g=e$. Así $G_x = \{e\}$ para toda $x\in X,$ de modo que los estabilizadores son triviales.
Ejemplo 2. Sean $G$ grupo, $H$ subgrupo de $G$ y $X = \{xH | x\in G\}$ con $g\cdot(xH) = gx H$ para toda $g,x\in G.$
Si $g\in G$ es tal que $g\cdot (xH) = xH$ para toda $x\in G$, entonces \begin{align*} &\;gxH = xH &\text{Para toda } x\in G\\ \Rightarrow &\; x^{-1} g x \in H &\text{Para toda } x\in G\\ \Rightarrow &\; g\in xHx^{-1} &\text{Para toda } x\in G. \end{align*}
Si $H\unlhd G$ esto se cumple para toda $g\in H$. Por lo tanto la acción no necesariamente es fiel.
Ahora, dada una clase lateral $xH \in X$. \begin{align*} G_{xH} &= \{g\in G | g\cdot (xH) = xH\}\\ &= \{g\in G| gxH = xH\}\\ &= \{g\in G | x^{-1}gx\in H\} \\ &= \{g\in G | g\in xHx^{-1}\}\\ &= xHx^{-1}. \end{align*}
Así $G_{xH} = xHx^{-1}$ para toda $x\in G.$
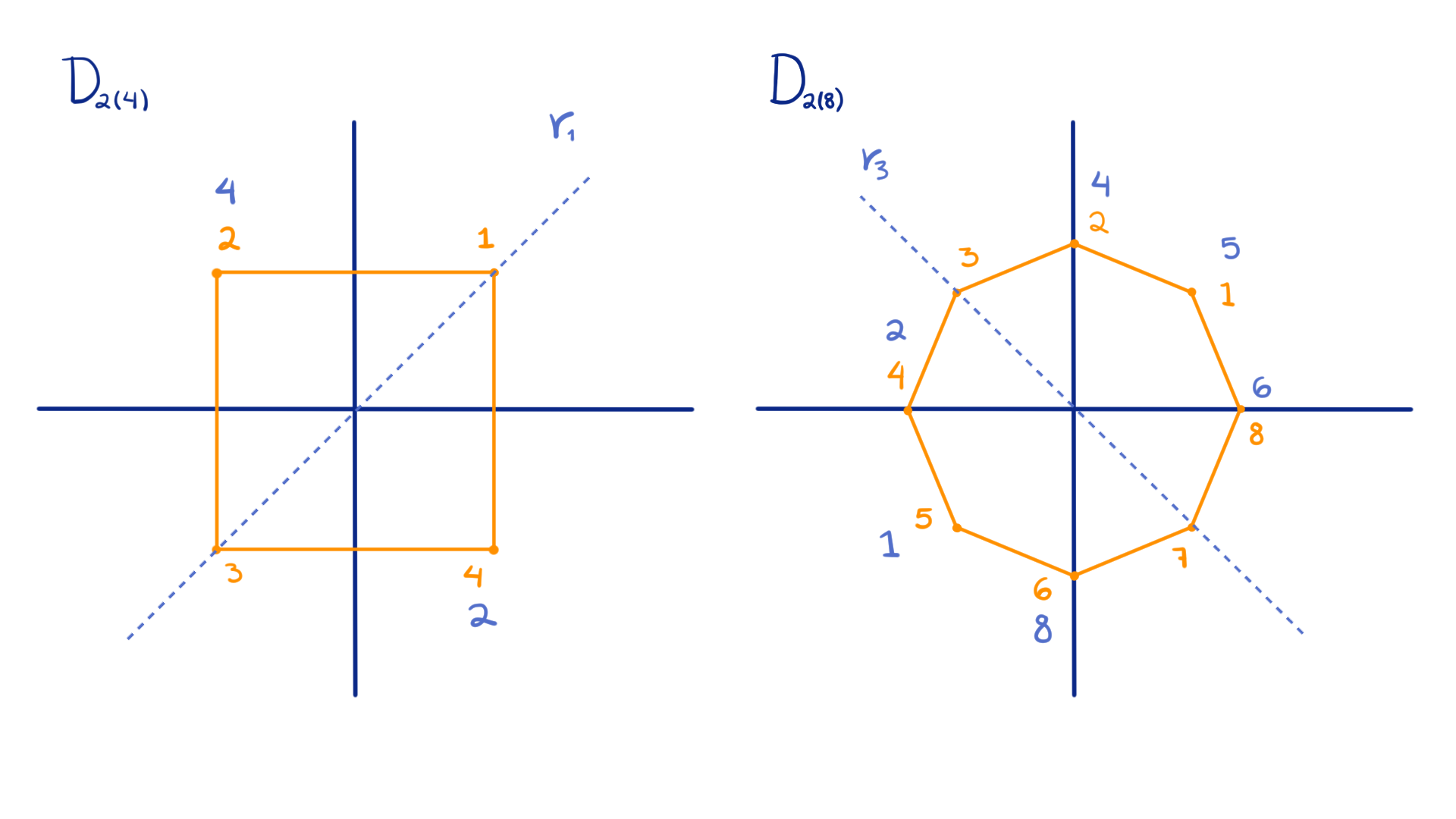
Ejemplo 3. Sean $G = D_{2(n)}$ el grupo diédrico y $X = \{1,2,\cdots, n\}$ los distintos vértices del polígono regular de $n$ lados.
Dados $g\in G, i \in X$ definimos $g\cdot i = g(i)$.
Si $g\in G$ es tal que $g\cdot i = i$ para toda $i \in X$, entonces $g(i) = i$ para toda $i\in X$. Así, $g$ sería una transformación lineal en el plano, que fija a los vértices $1$ y $2,$ los cuales forman una base del plano. Por lo tanto $g = \text{id}$ y la acción es fiel.
Dado $i\in X$, \begin{align*} G_i &= \{g \in G | g\cdot i = i\}\\ &= \{g\in G | g(i) = i\}\\ &= \{\text{id},r_i\} \end{align*} con $r_i$ la reflexión con respecto a la recta que pasa por $(0,0)$ y $i.$
Por último, haremos una observación.
Ilustración de lo que sucede con $r_i$ de $D_{2(n)}.$ Usamos $D_{2(4)}$ representado con un cuadrado y $D_{2(8)}$ representado con un octágono. En el dibujo, $r_1$ mantiene fijo a 1 y 3, y $r_3$ mantiene fijo a 3 y 7.
Observación. Sean $G$ un grupo, $X$ un $G$-conjunto y $x\in X$. Entonces, $G_x$ es un subgrupo de $G$.
Demostración. Sean $G$ grupo, $X$ un $G$-conjunto y $x\in X.$
El neutro de $G$ siempre está en el estabilizador ya que, \begin{align*} e\cdot x = x \quad \forall x\in X, \end{align*}
entonces $e\in G_x.$
Si $a,b\in G_x$, entonces $(ab)\cdot x = a\cdot (b\cdot x) = a\cdot x = x = x$. Así, $ab\in G_x$. Es decir, el estabilizador es cerrado bajo producto.
Finalmente si $a\in G_x$, $a\cdot x = x$, entonces $a^{-1}\cdot x = a^{-1}\cdot (a\cdot x) = (a^{-1}a)\cdot x = e\cdot x = x$, así $a^{-1} \in G_x$.
Por lo tanto $G_x \leq G$.
$\blacksquare$
Tarea moral
En cada uno de los incisos del ejercicio 1 de la entrada de acciones, en donde haya una acción, describe cómo son las órbitas y determina si se trata de una acción transitiva.
Considera el conjunto $X = \{1,2,3,4,5,6,7,8\}$ y el grupo $G = \left< a \right>$ con $a\in S_8$. Define $a^{i}\cdot j = a^{i}(j)$ para cada $a^{i} \in G$ y cada $j\in X$.
Verifica que es una acción de $G$ en $X$.
Si $a = (2 \; 4 \; 1 \; 7 \; 8)$ describe las órbitas y determina si se trata de una acción transitiva.
Si $a = (6 \; 1 \; 5 \; 8)(3 \; 4)$ describe órbitas y determina si se trata de una acción transitiva.
Sean $G$ un grupo y $X$ un $G$-conjunto. Si la acción de transitiva prueba o da un contraejemplo para las siguientes afirmaciones:
$\mathcal{O}(x) = X$ para todo $x\in X$.
Para cada $x,y \in X$ existe $g\in G$ tal que $g\cdot x = y$.
Considera el grupo diédrico $D_{2(n)}$ actuando sobre sí mismo con conjugación.
Determina si la acción es fiel.
Encuentra el estabilizador de $a$, con $a$ la rotación de $\displaystyle\frac{2\pi}{n}$, y el de $b$ con $b$ la reflexión con respecto al eje $x$.
Sean $G$ un grupo y $X$ un $G$-conjunto.
Determina si el hecho de que exista $x\in G$ tal que $G_x = \{e\}$ implica que la acción es fiel.
Determina si el hecho de que la acción sea fiel implica que exista $x\in G$ tal que $G_x=\{e\}$.
Más adelante…
Continuaremos estudiando las propiedades de las órbitas, en particular, el orden de las órbitas, ¿cómo se relaciona éste con el orden del grupo $G$? Daremos respuesta a ello en la siguiente entrada.
En esta sección mostraremos los fundamentos de uno de los términos más importantes de las matemáticas. Una descripción histórica la presenta Yanina del Carmen Rodríguez Reyes, en la tesis «Desarrollo histórico-pedagógico del concepto de compacidad» en la Universidad de Panamá, República de Panamá 2018.
«La compacidad surgió de uno de los periodos más productivos de la actividad matemática. En la segunda mitad del siglo XIX en Europa las matemáticas avanzadas comenzaron a tomar la forma que conocemos actualmente. Muchos matemáticos, incluyendo Weierstrass, Hausdorff y Dedekind estaban preocupados por los fundamentos de las matemáticas y comenzaron a hacer muchas rigurosidades de las ideas que durante siglos habían sido dadas por sentado. Mientras que algunos de los trabajos del siglo XIX se pueden remontar a las preocupaciones matemáticas de los antiguos griegos, el nivel de rigor y la abstracción refleja una revolución en el pensamiento matemático. Fréchet fue influenciado por muchos contemporáneos y predecesores pero parece que merece el crédito como el padre de la compacidad. Fue Fréchet quien dio el nombre al concepto en un documento que conduce a su tesis doctoral de 1906. Fréchet también define por primera vez espacios métricos aunque no usando ese término y de hecho incursiona en el análisis funcional proporcionando así un contexto para el cual la importancia de la compacidad se hizo indiscutible”. (Rodríguez, 2018).
Conjuntos compactos
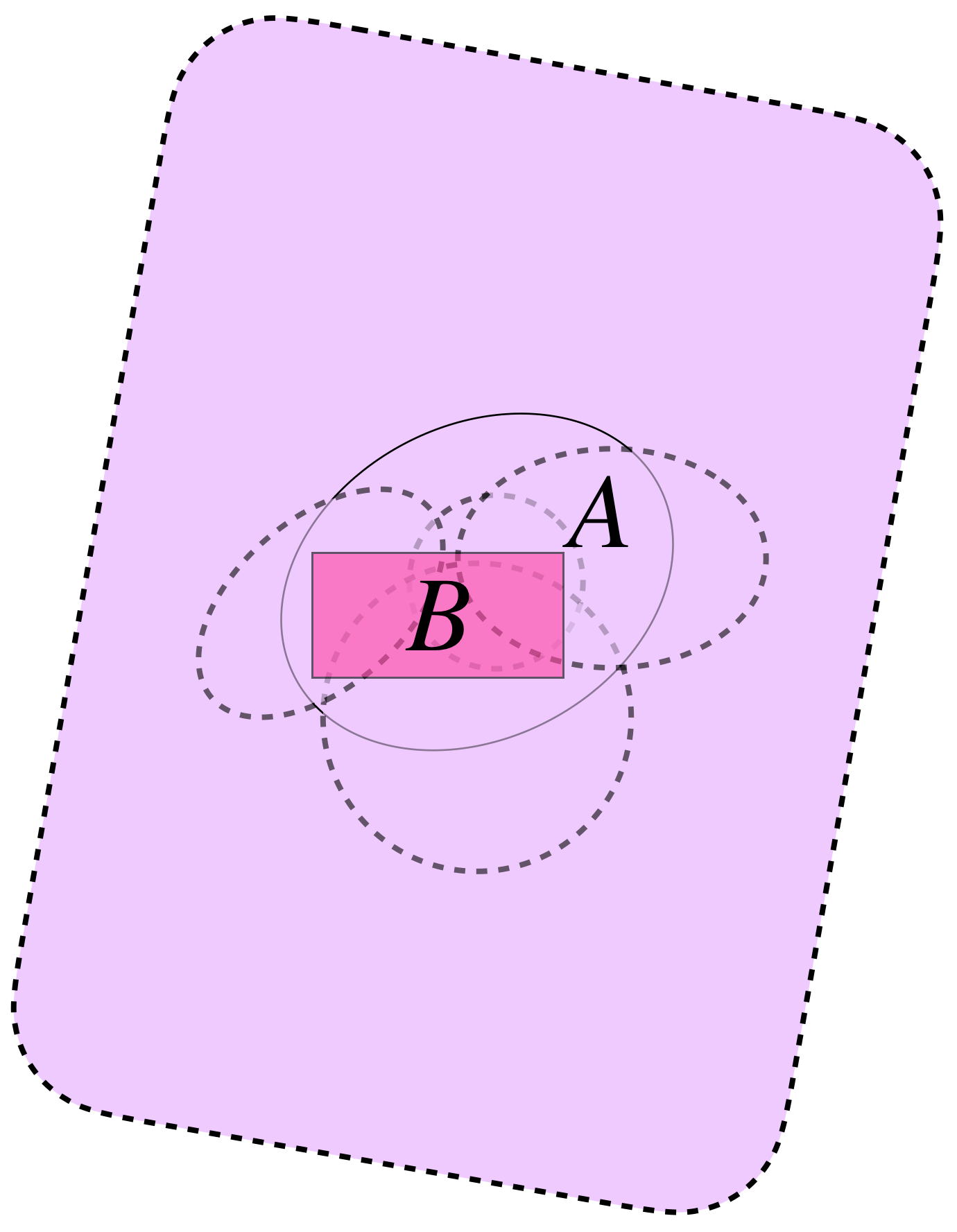
Sea $(X,d)$ un espacio métrico y $A \subset X.$ Podemos pensar en «cubrir» este subconjunto a través de otros a modo de la siguiente imagen, es decir, conjuntos cuya unión logre contener a $A.$
$A$ cubierto por conjuntos.
La cantidad de subconjuntos que forman parte de la cubierta elegida puede ser finita, numerable o no numerable, entonces, para ser formales, cada subconjunto se puede indexar con los elementos de algún conjunto $\mathcal{I}.$ Así tenemos la siguiente:
Definición. Cubiertade un conjunto. Sea $A \subset X.$ Decimos que una familia de subconjuntos $\mathcal{C} = \{A_{i} \subset X \, | \, i \in \mathcal{I} \}$ es una cubierta de $A$ en $X$ si $$A \subset \underset{i \in \mathcal{I}}{\cup} \, A_{i} \,$$
Representación de conjuntos cuya unión contiene a $A,$ es decir, una cubierta de $A.$
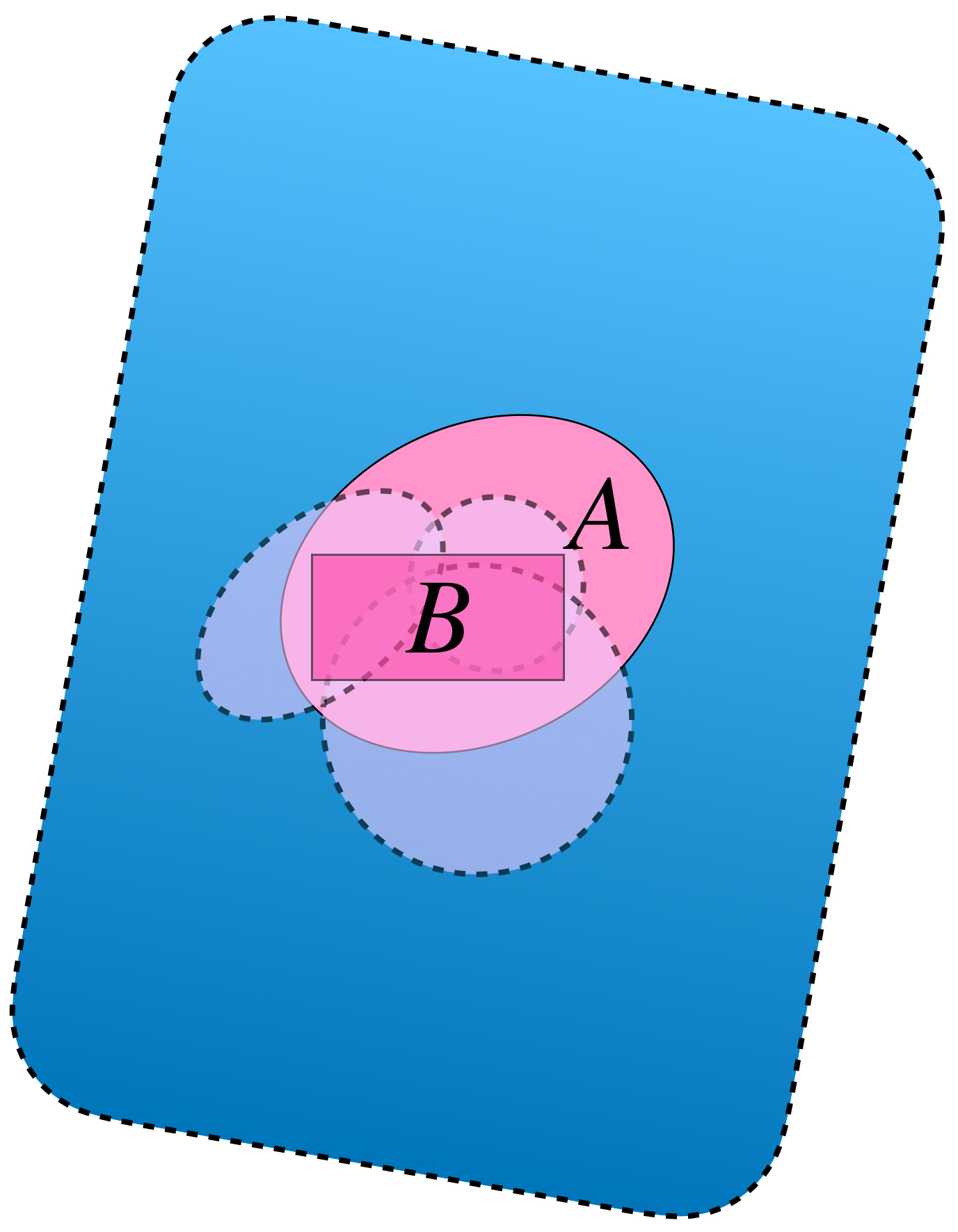
Definición. Cubierta abierta. Si para toda $i \in \mathcal{I}$ se cumple que el conjunto $A_i \,$ es abierto, diremos que $\mathcal{C}$ es una cubierta abierta de $A$ en $X.$
Representación de conjuntos abiertos cuya unión contiene a $A,$ es decir, una cubierta abierta de $A.$
Definición. Subcubierta. Si tomamos conjuntos de una cubierta $\mathcal{C}$, digamos, una familia $\mathcal{C’} \subset \mathcal{C} \, $ y $\, \mathcal{C’}$ es también una cubierta de $A$ diremos que $\mathcal{C’}$ es unasubcubiertade $\mathcal{C}.$
Los conjuntos en rosa son una subcubiertade $\mathcal{C}.$
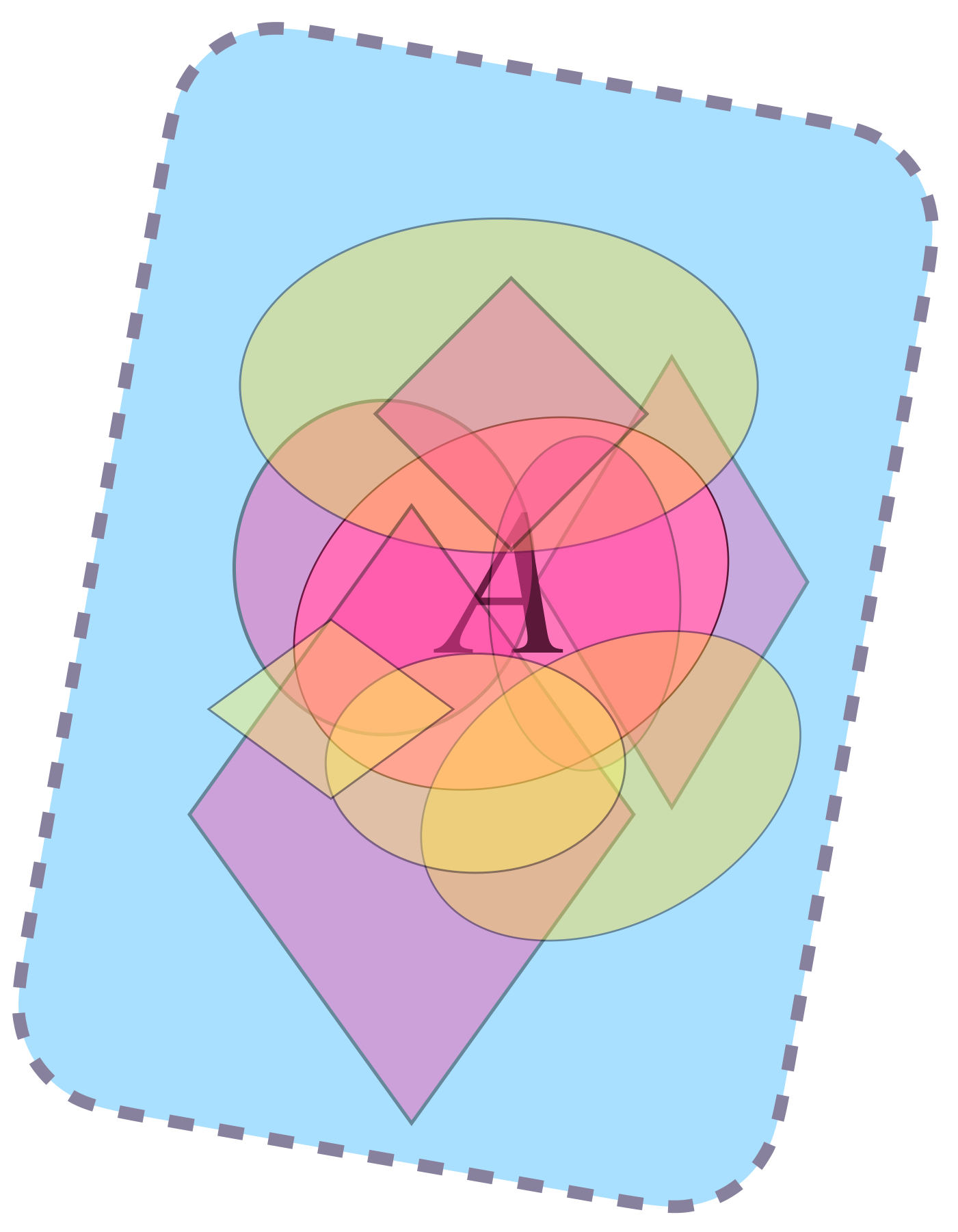
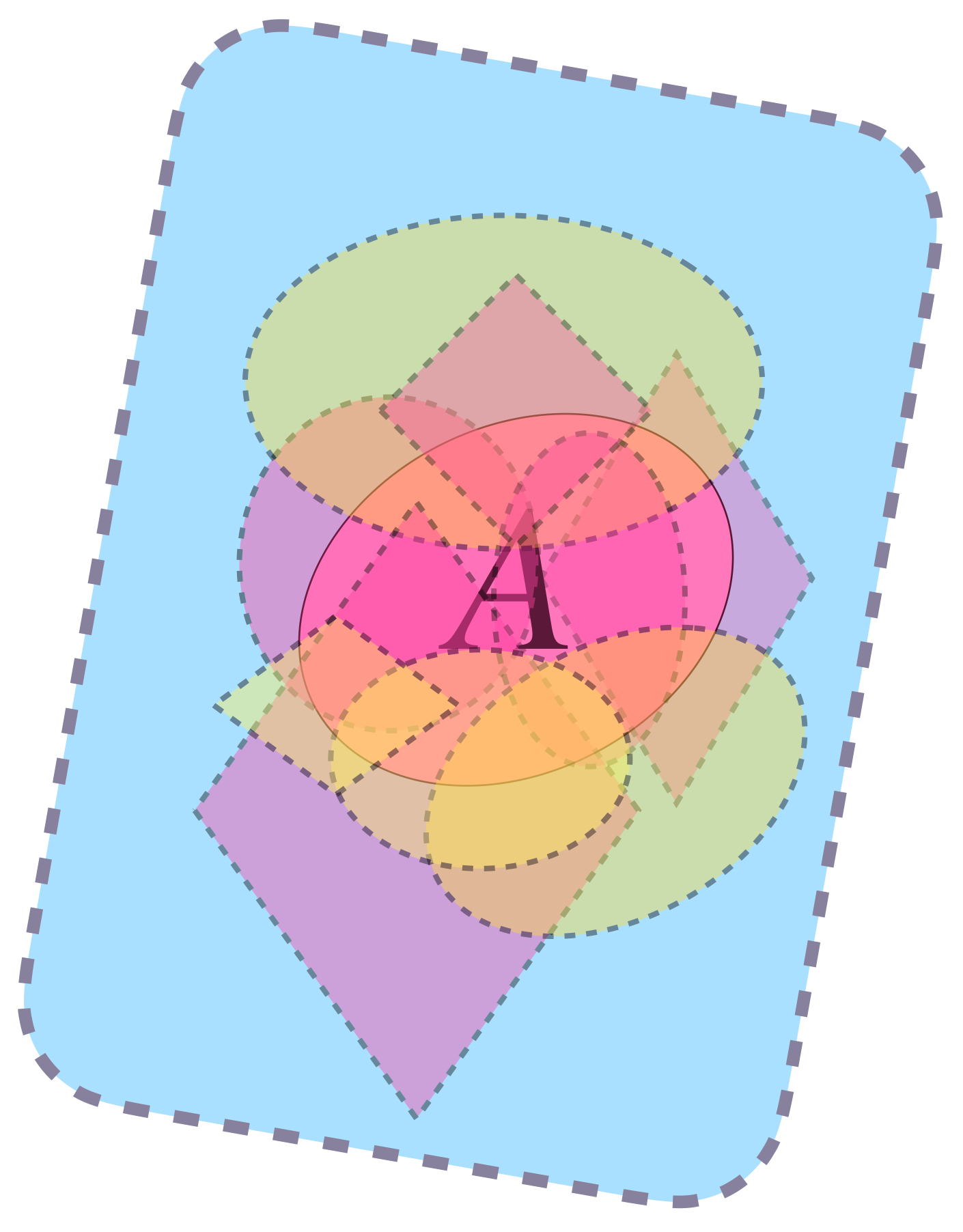
Definición. Conjunto compacto. Sea $A$ un conjunto de un espacio métrico $(X,d).$ Decimos que $A$ es un conjunto compacto si dada cualquier cubierta abierta $\mathcal{C}$ de $A$, existe una subcubierta finita de $\mathcal{C}.$
El concepto de compacidad suele tomar mayor relevancia cuando en un espacio topológico se considera el subespacio generado por el conjunto compacto. En estos casos se le denomina espacio topológico compacto.
Representación de una subcubierta finita abierta (de conjuntos abiertos). Decimos que $A$ es compacto.
Según la definición, para demostrar que un conjunto $A$ no es compacto, bastará con identificar una cubierta abierta de la cual no sea posible extraer una subcubierta finita (conjuntos cuya unión logre contener el conjunto $A$).
Ejemplos
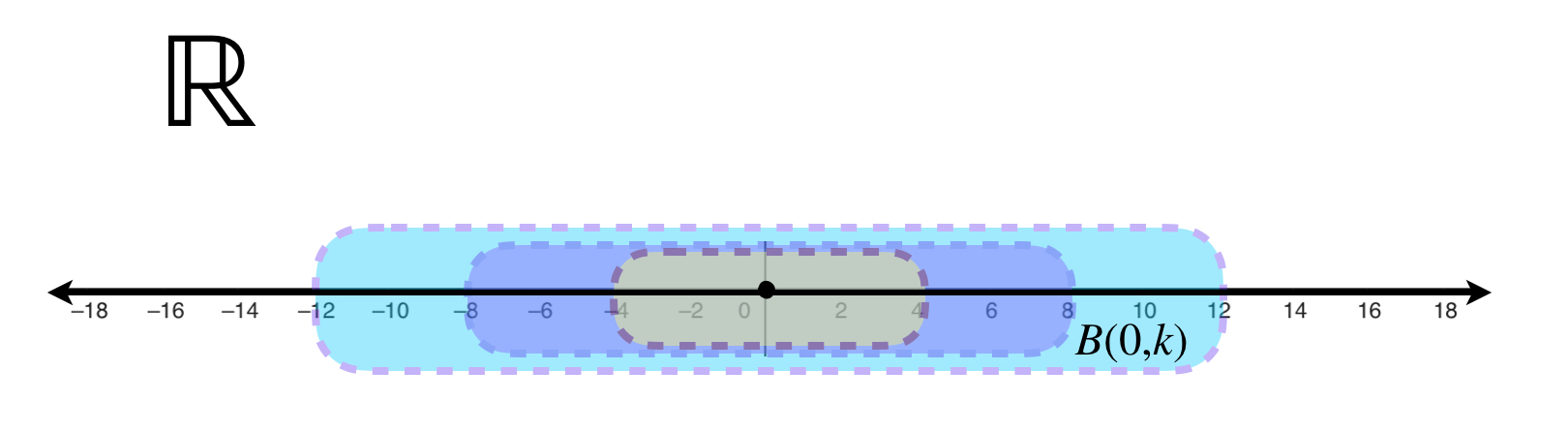
El conjunto $\mathbb{R}$ con la métrica euclidiana no es compacto.
Demostración: El conjunto de intervalos abiertos con centro en $0$ y radio $n, \, n \in \mathbb{N}$ es decir, $\mathcal{C}=\{(-n,n) \, | \, n \in \mathbb{N}\}$ es una cubierta abierta de $\mathbb{R}.$ Pero si consideramos un subconjunto finito $\mathcal{C’} \subset \mathcal{C}$ entonces $\mathcal{C’} = \{(-k_1,k_1),(-k_2,k_2),…,(-k_m,k_m)\}$ con $k_1,k_2,…,k_m \in \mathbb{N}.$ Sea $k=max\{k_1,k_2,…,k_m\}$ podemos ver que la unión de los elementos en $\mathcal{C’}$ es el intervalo $(-k,k)$ que claramente, no contiene a $\mathbb{R}$, por lo tanto $\mathbb{R}$ no es compacto.
Representación de intervalos de la subcubierta finita. Su unión no contiene a $\mathbb{R}.$
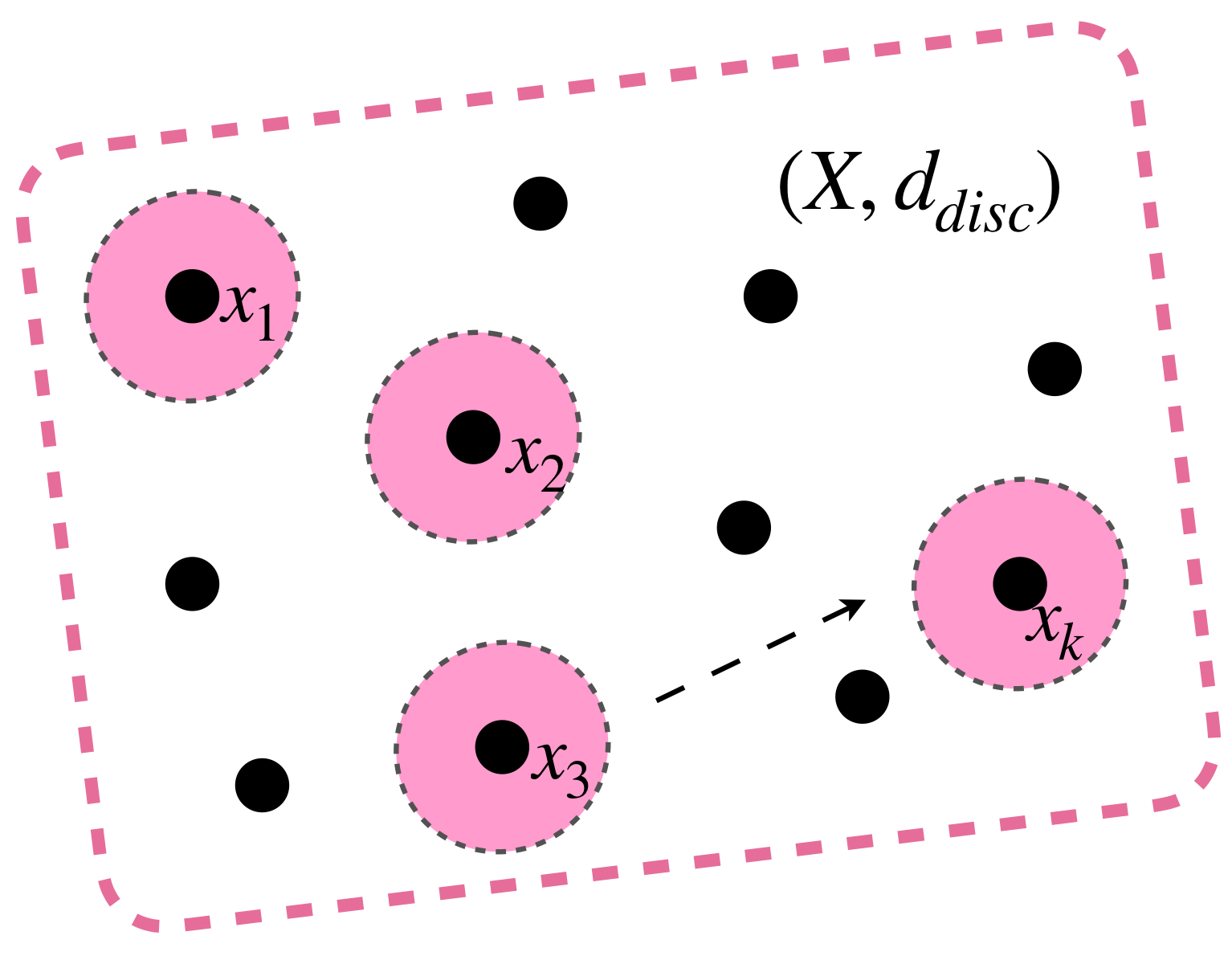
Un espacio discreto es compacto si y solo si es finito.
Considera un conjunto $X$ con la métrica discreta. Entonces, para cada $x \in X$ el conjunto $\{ x \}$ es abierto, así $\, \mathcal{C}=\{\{x\} \, | \, x \in X\}$ es una cubierta abierta de $X.$ Un subconjunto finito de esta cubierta estaría dada por $\mathcal{C’}=\{\{x_1\},\{x_2\},…,\{x_k\}\}, \, k \in \mathbb{N}$ cuya unión de conjuntos contiene $k$ elementos. Por lo tanto, si $X$ es infinito no es compacto con la métrica discreta. La prueba de que si $X$ es finito entonces es compacto se deja como ejercicio al final de esta sección.
Si $(X,d_{disc})$ es infinito no hay subcubierta finita.
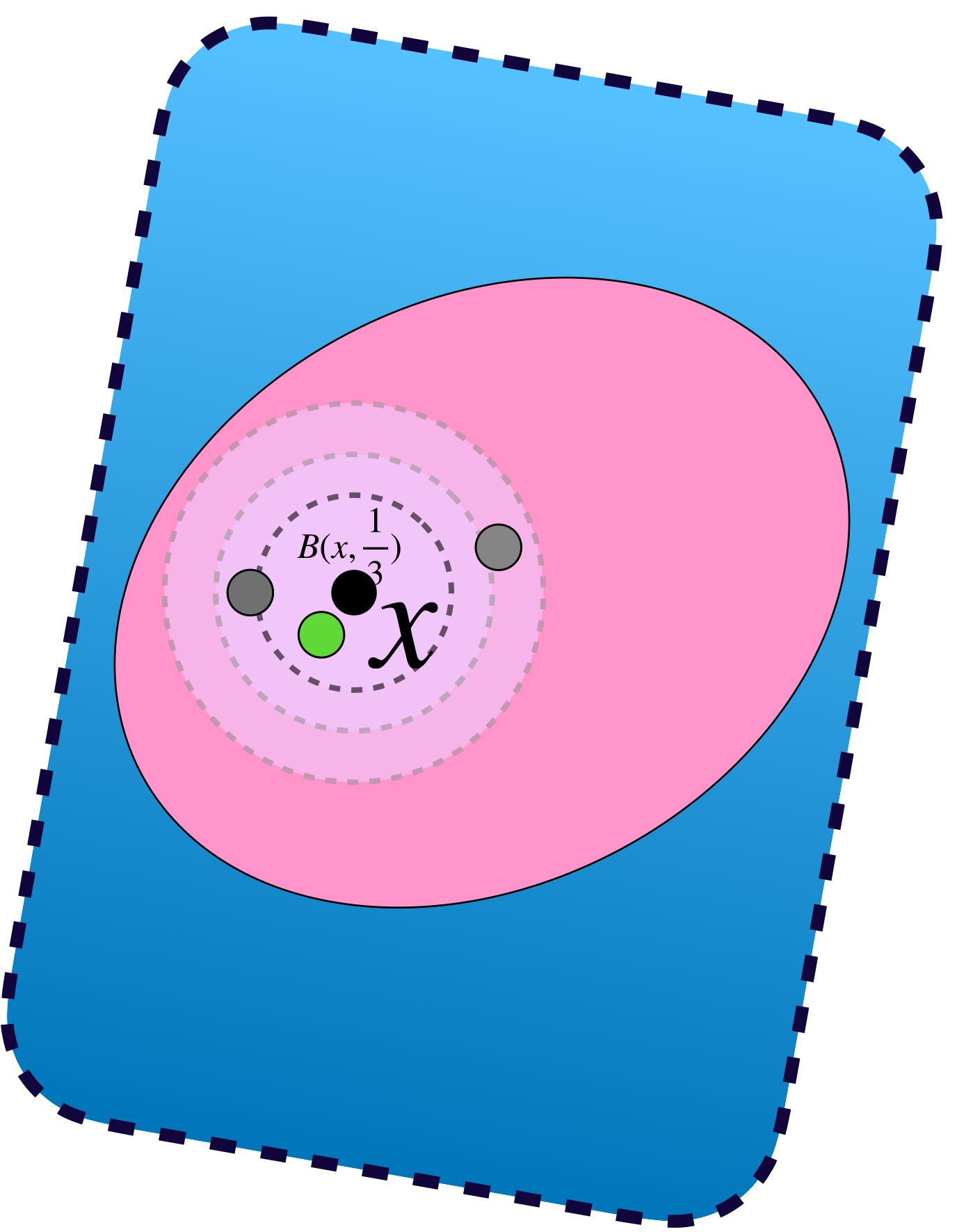
Proposición. Si $A$ es un conjunto compacto en $(X,d)$, entonces toda sucesión en $A$ tiene una subsucesión que converge en $A.$
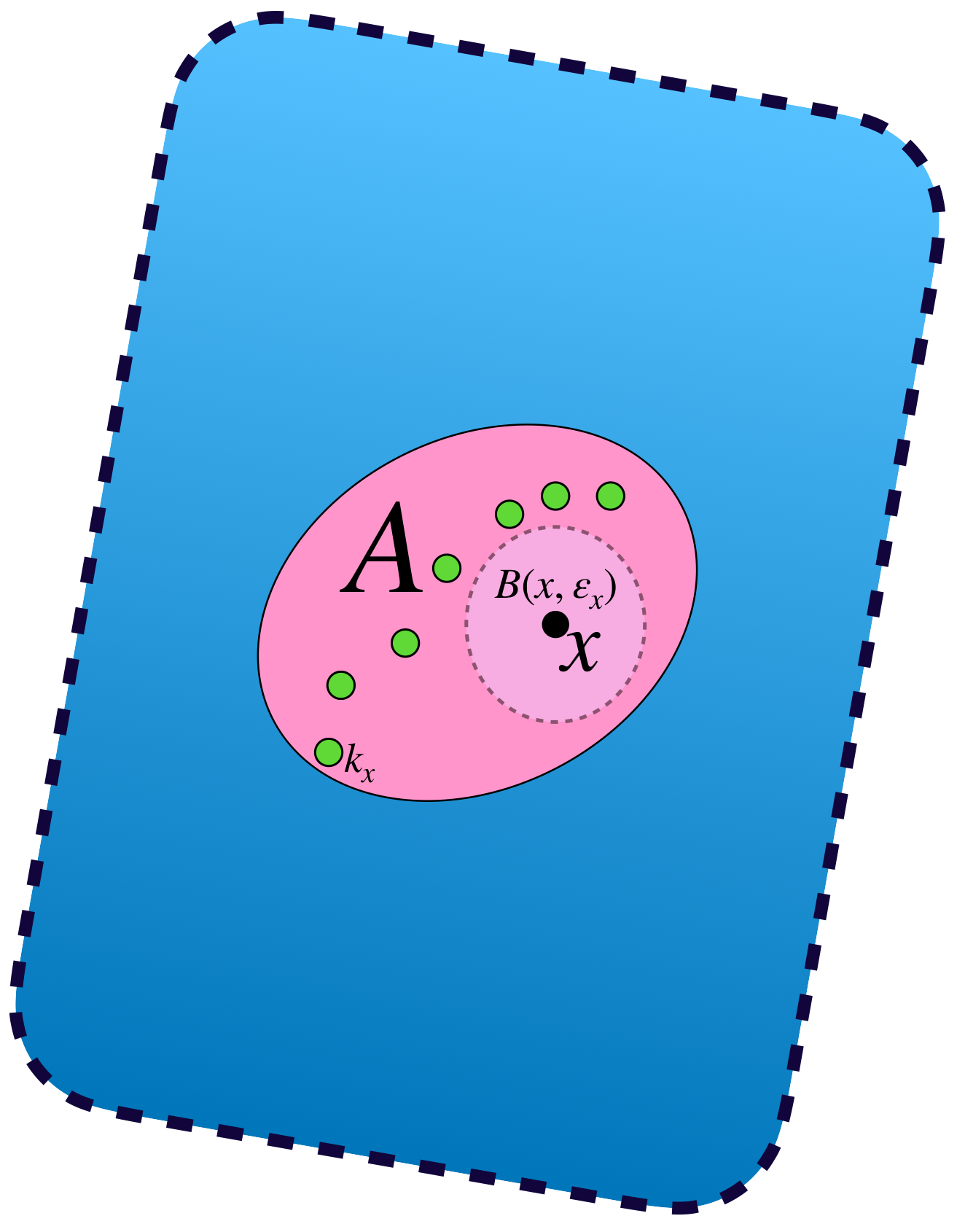
Demostración: Sea $A \subset X$ compacto y $(x_n)_{n \in \mathbb{N}} \,$ una sucesión en $A.$ Demostraremos primero que existe un punto $x \in A$ tal que toda bola abierta con centro en $x$ tiene una subsucesión de $(x_n).$ Supón por el contrario que no es así, es decir, para todo punto $x \in A$ existe $\varepsilon_x >0$ y existe $k_x \in \mathbb{N}$ tal que para toda $k \geq k_x, \, x_k \, \notin \, B(x,\varepsilon_x).$
No hay subsucesión dentro de la bola abierta pues todos los últimos términos de la sucesión están fuera de ella.
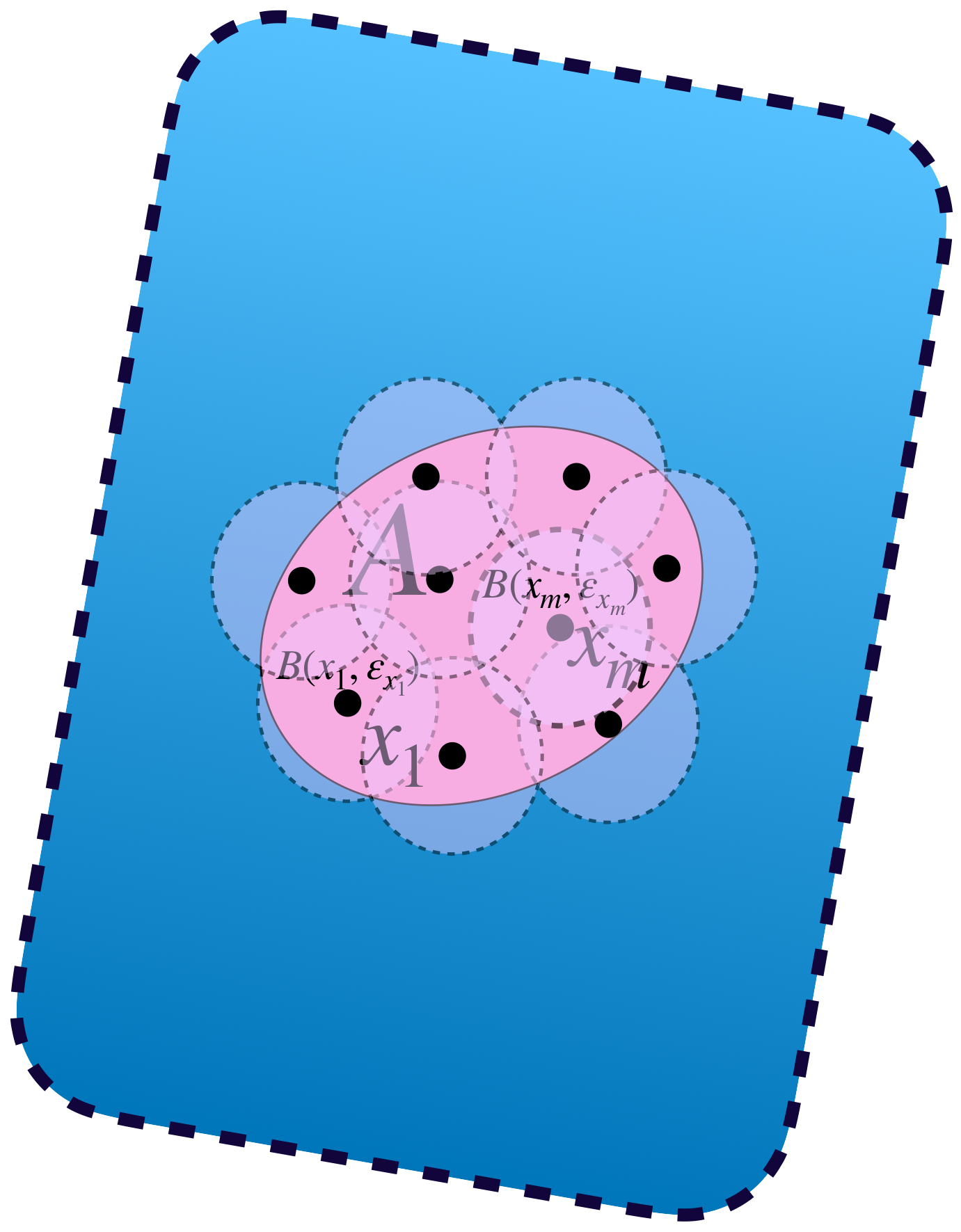
El conjunto de todas estas bolas abiertas, $\{B(x, \varepsilon_x) \, | \, x \in A\}$ es una cubierta abierta del conjunto $A.$ Como $A$ es compacto, existe $\{B(x_1, \varepsilon_{x_1}),B(x_2, \varepsilon_{x_2}),…,B(x_m, \varepsilon_{x_m})\}$ subcubierta finita. Sea $l := max \{k_{x_1},k_{x_2},…,k_{x_m} \}$ entonces para toda $k \geq l,$ el término $x_k \notin \underset{1\leq i \leq m}{\cup} \, B(x_i, \varepsilon_{x_i}) \supset A,$ en consecuencia $x _k \notin A$ lo cual es una contradicción, pues todos los términos de la sucesión están en $A$, por lo tanto existe un punto $x \in A$ tal que toda bola abierta con centro en $x$ tiene una subsucesión de $(x_n).$
Cubierta finita de bolas abiertas con centros $x_1, \, x_2,…, x_m.$
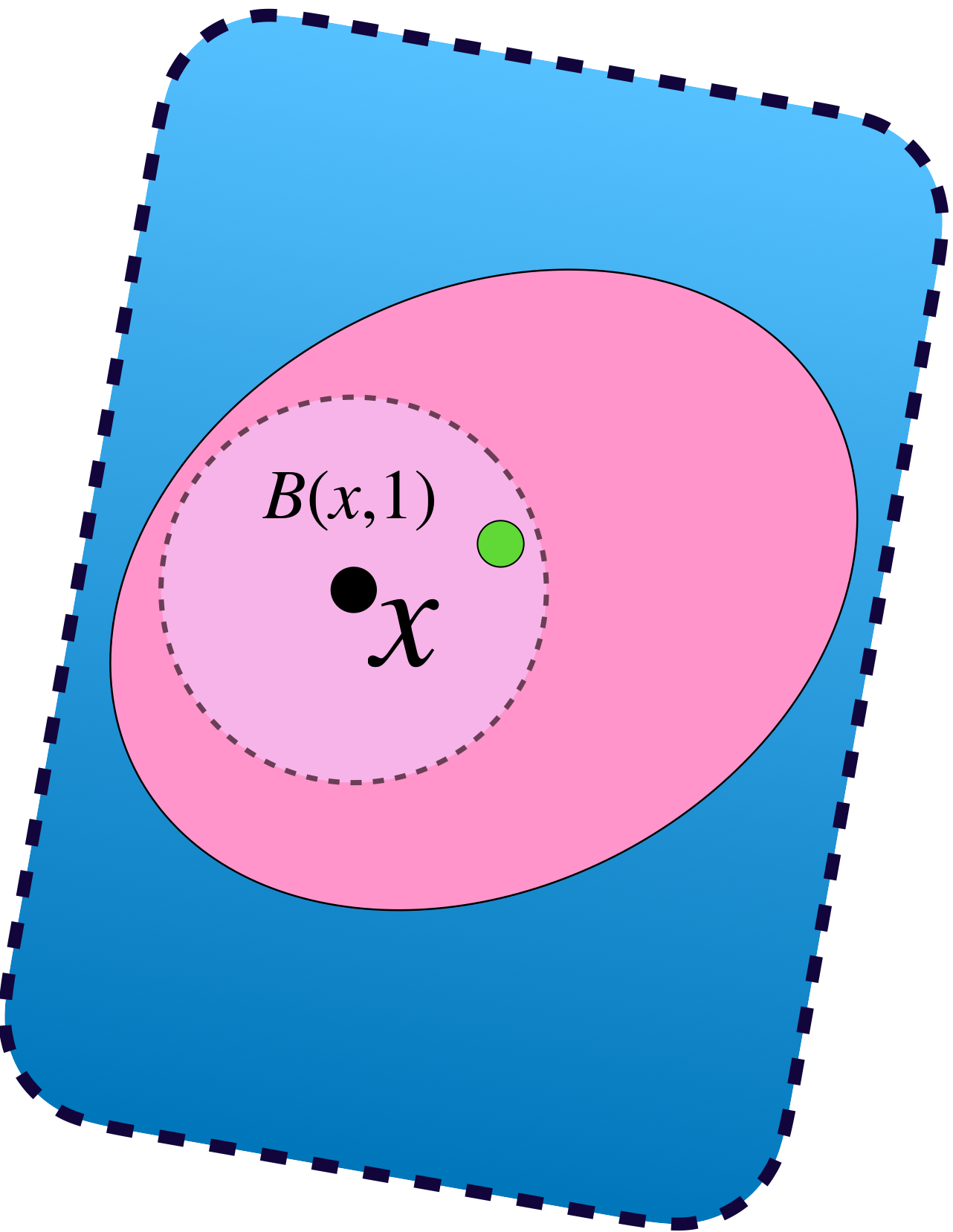
Sea $x \in A$ dicho punto. Por la propiedad mencionada es posible seleccionar un punto $x_{k_j}$ de la sucesión que esté en cada bola $B(x,\frac{1}{j}), \, j \in \mathbb{N}$ tal que no se repita con los anteriores y conserven el orden de la sucesión original. Por lo tanto $(x_{k_j})$ es subsucesión de $(x_n)$ y $x_{k_{j}} \to x.$ Así probamos que toda sucesión de un conjunto compacto tiene una subsucesión que converge en él.
El punto verde representa a $x_{k_1} \in B(x,1).$
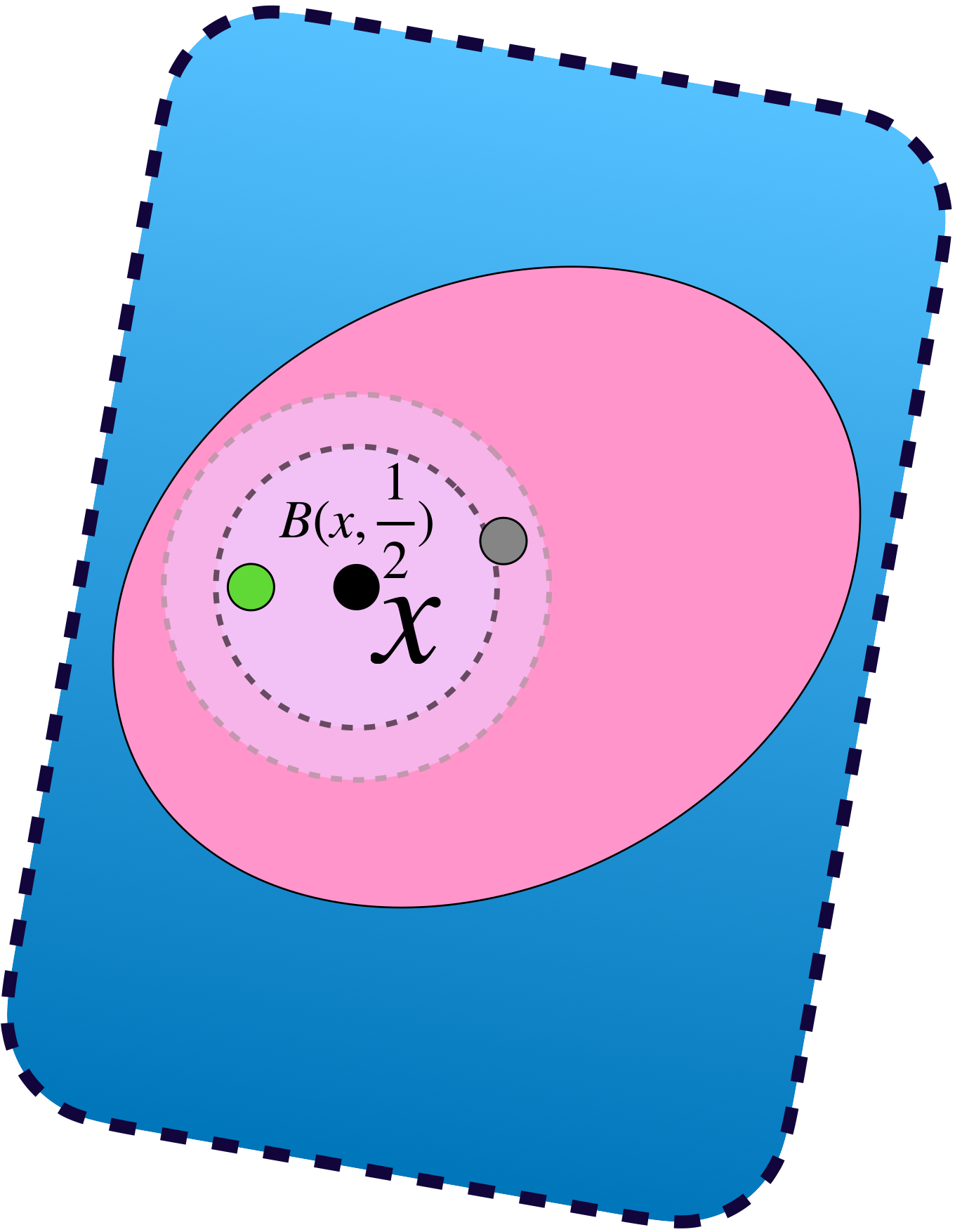
El punto verde representa a $x_{k_2} \in B(x,\frac{1}{2}).$
El punto verde representa a $x_{k_3} \in B(x, \frac{1}{3}).$
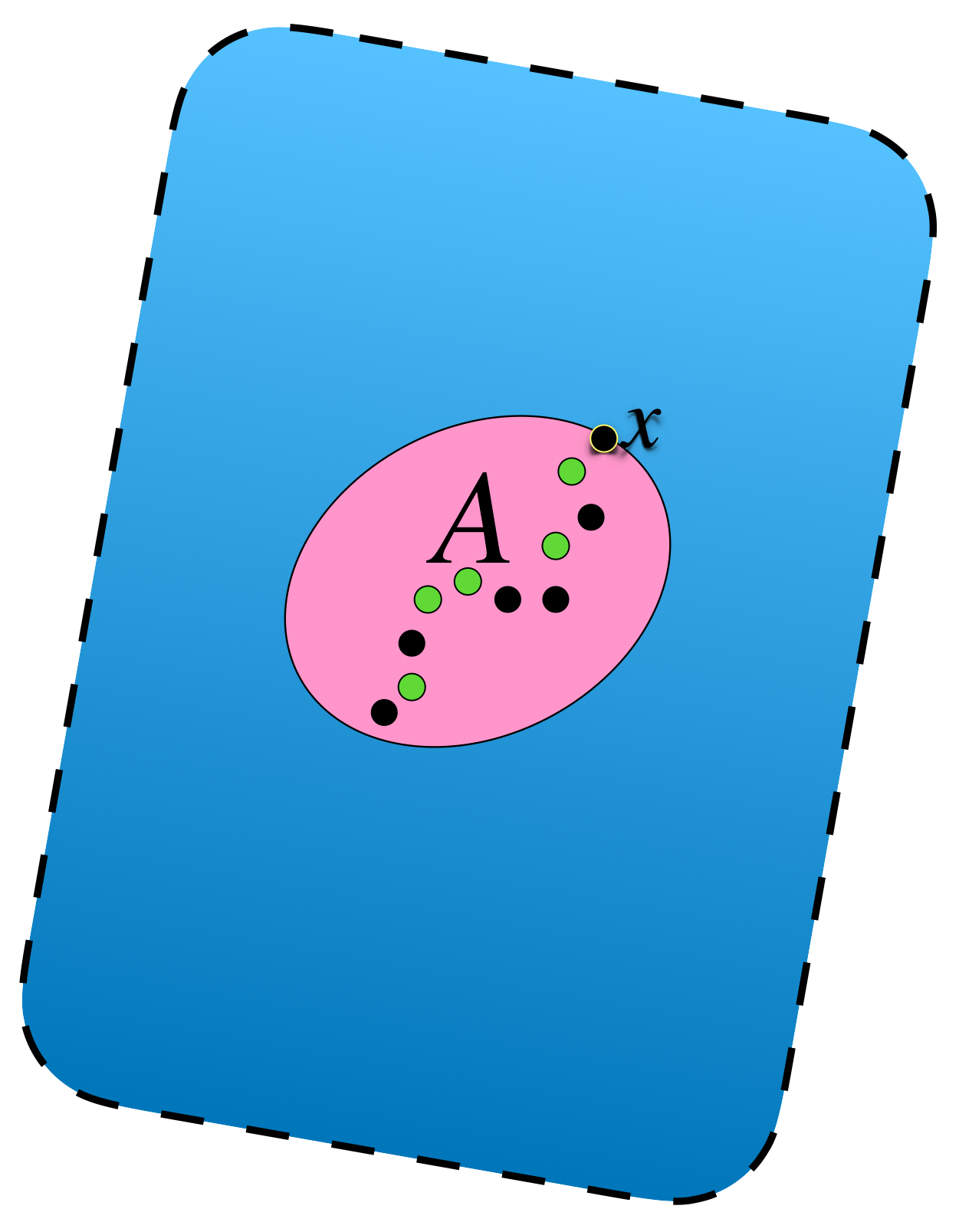
Proposición.Si $A \subset X$ es compacto entonces es cerrado y acotado.
Demostración: Recordemos que un conjunto es cerrado si y solo si es igual a su cerradura. Como $A \subset \overline{A}$ basta demostrar que $\overline{A} \subset A.$ Sea $x \in \overline{A}$ entonces existe una sucesión $(x_n)_{n \in \mathbb{N}} \,$ en $A$ que converge en $x,$ (visto en Convergencia). Pero por la proposición que acabamos de ver, $(x_n)$ tiene una subsucesión que converge en $A.$ Por la unicidad del límite, ese punto de convergencia es $x$, por lo tanto $x \in A.$
La subsucesión converge en $x.$ Por lo tanto $x \in A.$
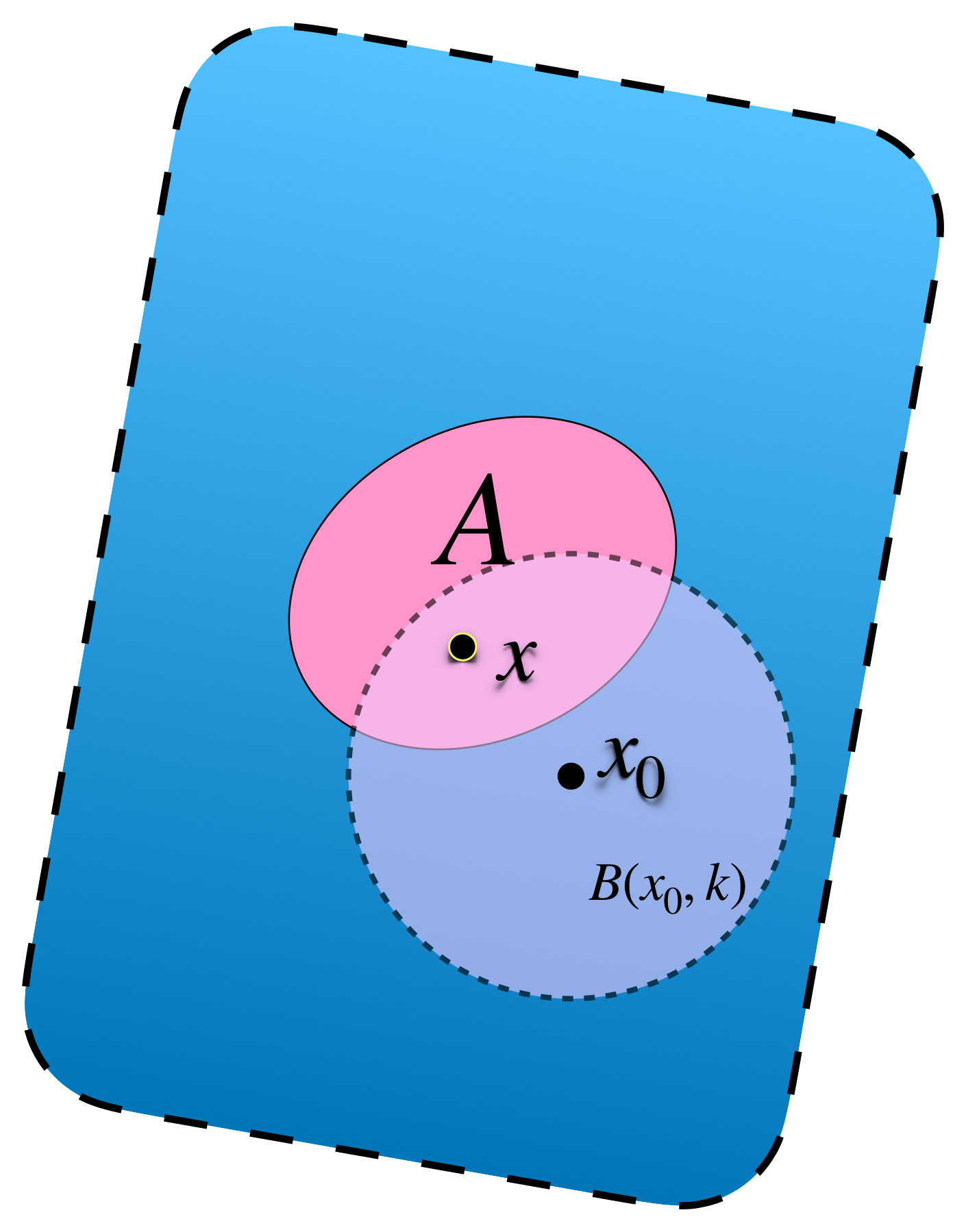
Para probar que $A$ es acotado notemos lo siguiente. Si fijamos un punto $x_0 \in X$, podemos poner cada $x \in A$ en una bola abierta con centro en $x_0$ y radio mayor a la distancia $d(x,x_0).$ Elegimos el radio como un número natural $k \,$ suficientemente grande, tal que $d(x,x_0)<k.$ Entonces $x \in B(x_0,k).$
Cada punto de $A$ está en una bola abierta de $x_0.$
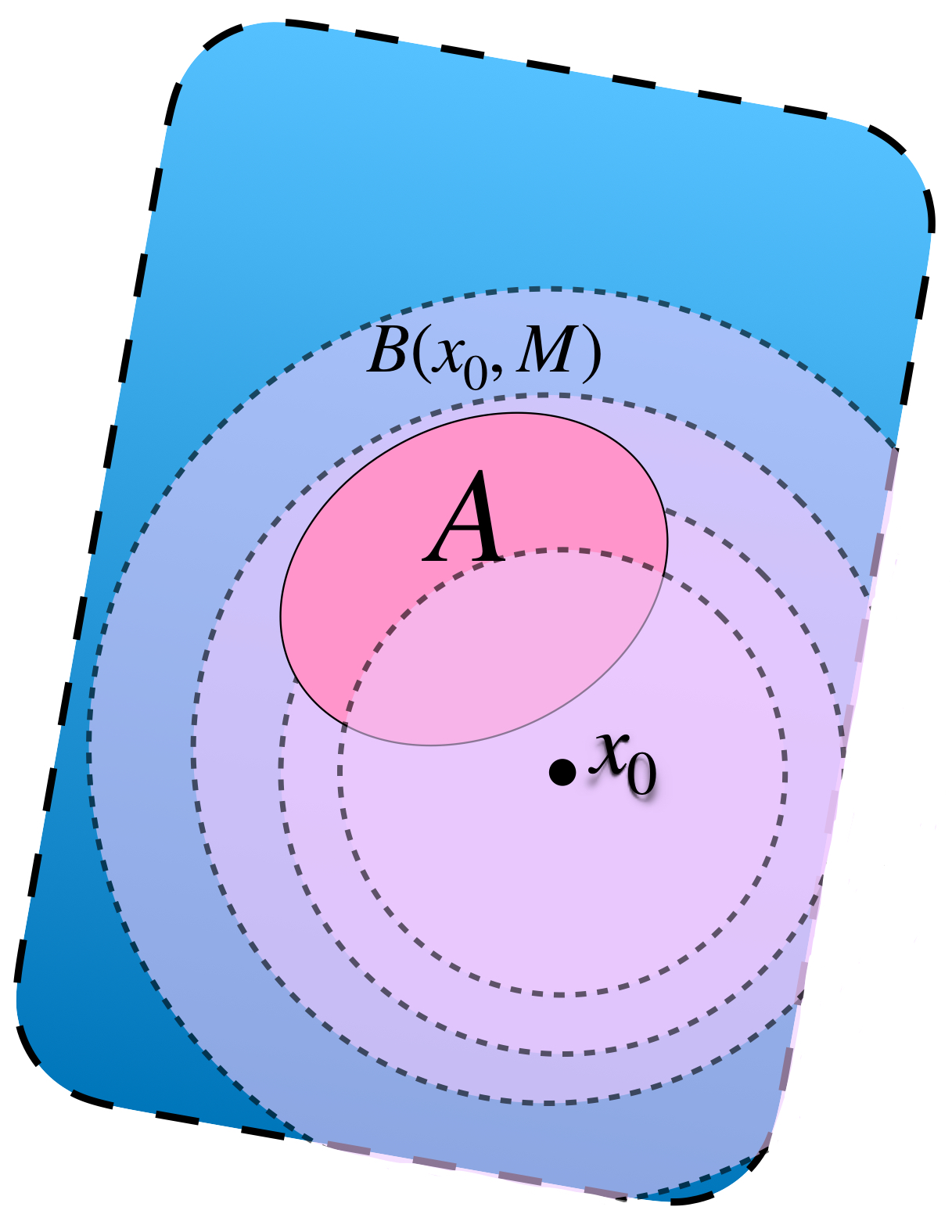
En consecuencia el conjunto de bolas abiertas $\{B(x_0,n) \, | \, n \in \mathbb{N}\}$ es una cubierta abierta del conjunto $A$ que, como es compacto, tiene una subcubierta finita $\{B(x_0,n_1), B(x_0,n_2),…,B(x_0,n_m)\}.$ Sea $M := max \{n_1,n_2,…,n_m\}$ entonces $A \subset B(x_0,M)$ por lo tanto $A$ es acotado.
$A \subset B(x_0,M).$
Ejemplos
A continuación recordamos un resultado conocido de los cursos de cálculo:
Teorema de Heine Borel.Considera $\mathbb{R}^n$ con la métrica euclidiana y $A \subset \mathbb{R}^n.$ Entonces $A$ es un conjunto compacto si y solo si es cerrado y acotado. La demostración la puedes consultar en Criterio de Cauchy, Conjuntos Compactos y compacidad por sucesiones.
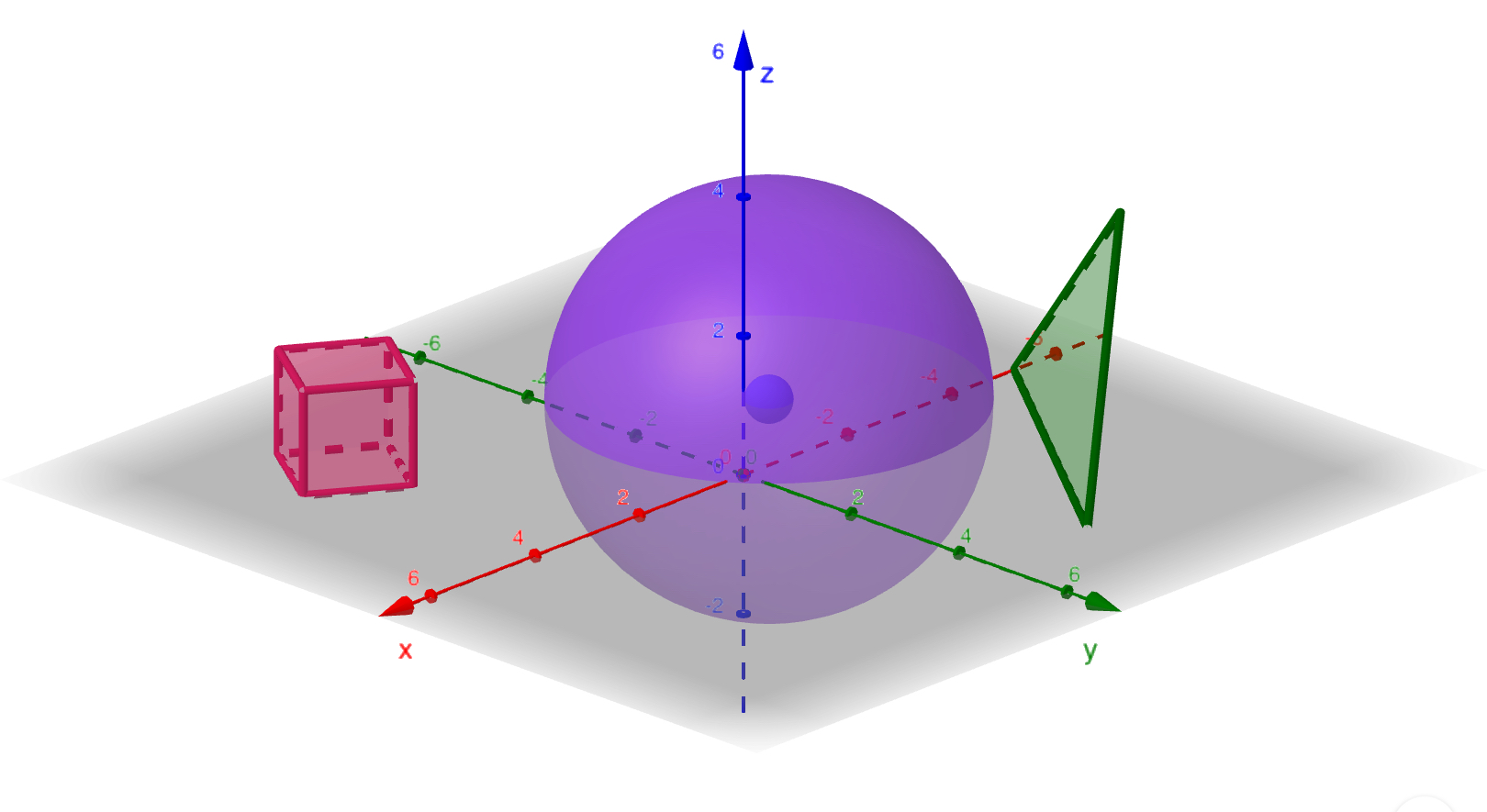
Conjuntos compactos en $\mathbb{R}^3.$
No obstante, hay espacios métricos en los que no es suficiente que un conjunto sea cerrado y acotado para que sea compacto:
Ejercicio: Considera el conjunto $\mathbb{R}$ y $d$ definida como $d(x,y):=min\{1, |x-y|\}, \, x,y \in \mathbb{R}$ entonces tenemos lo siguiente:
$d$ es una métrica en $\mathbb{R}.$
$d$ induce en $\mathbb{R}$ los mismos conjuntos abiertos que la métrica usual. Entonces un conjunto es compacto en $(\mathbb{R},d)$ si y solo si lo es en $(\mathbb{R},d_2).$
El conjunto $[0,\infty)$ es cerrado y acotado en $(\mathbb{R},d),$ pero no es compacto, pues no lo es en $(\mathbb{R},d_2).$
Pero no solo hay espacios cerrados y acotados que no son compactos. Otro hecho que probablemente te llame la atención es conocer que, contrario a lo que ocurre en el espacio euclidiano en $\mathbb{R}^n,$ hay espacios donde hay bolas cerradas que no son compactas:
Ejemplo. Considera el espacio $\ell_{\infty}.$ El conjunto dado por $\overline{B}(\mathcal{0},1)$ (donde $\mathcal{0}$ es la sucesión que en todos los términos vale 0), es cerrado y acotado en $\ell_{\infty}$ pero no es compacto.
Demostración: Es inmediato notar que $\overline{B}(\mathcal{0},1)$ es acotado. Por otro lado, en la entrada Nociones topológicas básicas en espacios métricos se dejó como tarea moral (ejercicio 4) que una bola cerrada en un espacio métrico es un conjunto cerrado. No obstante, no se da la compacidad: Sea $\varepsilon = \frac{1}{2}.$ Vamos a cubrir la bola $\overline{B}(\mathcal{0},1)$ con bolitas de radio $\frac{1}{2},$ esto es, $\{B(x,\frac{1}{2}) \, | \, x \in \overline{B}(\mathcal{0},1) \}$ es una cubierta abierta para $\overline{B}(\mathcal{0},1).$
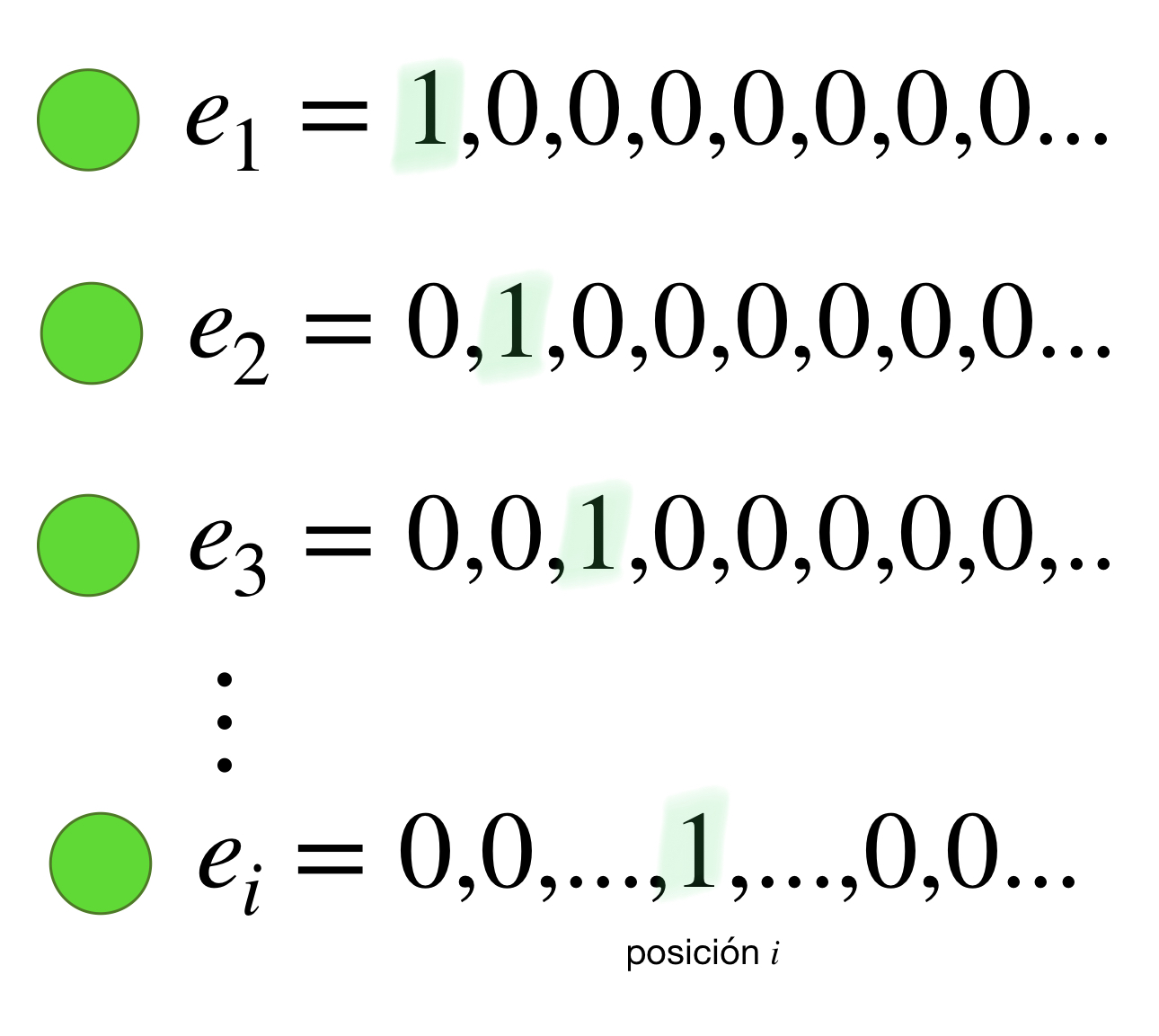
Nota que las sucesiones $e_i$ donde $e_i$ toma a $1$ como valor en la entrada $i$ y $0$ en el resto, son elementos de la bola, pues para cada $i \in \mathbb{N}$ se cumple que $\norm{e_i}_{\infty}=1.$
$e_i$ vale $1$ en la posición $i.$
Veamos ahora que hay a lo más una sucesión $e_i$ en cada bolita de la cubierta, pues si existen $j,k \in \mathbb{N}$ y $x \in \overline{B}(\mathcal{0},1)$ tales que $e_j, \, e_k \in B(x,\frac{1}{2})$ tenemos por la desigualdad del triángulo que $\norm{e_j- e_k}_{\infty} \leq \norm{e_j- x}_{\infty} + \norm{x- e_k}_{\infty} < \frac{1}{2}+\frac{1}{2} = 1.$ Pero esto no es verdad, pues para cualesquiera $j,k \in \mathbb{N}$ se satisface $\norm{e_j- e_k}_{\infty}=1.$
Por lo tanto no es posible cubrir, en principio, con una cantidad finita al conjunto $\{e_i \, | \, i \in \mathbb{N}\} \subset \overline{B}(\mathcal{0},1)$ en consecuencia, la bola cerrada $\overline{B}(\mathcal{0},1)$ no es compacta. Un argumento análogo al que acabamos de mostrar puede usarse para concluir que el espacio de sucesiones $\{e_i \, | \, i \in \mathbb{N}\}$ en $\ell_1$ no es compacto. En la siguiente entrada probaremos que no tiene la propiedad que se denomina como «totalmente acotado», lo cual también implica que no es compacto.
Veamos una condición que hereda la compacidad a un subconjunto de un conjunto compacto:
Proposición. Un subconjunto cerrado $B$ de un conjunto compacto $A$ también es compacto.
Demostración:
Sea $B \subset A$ con $B$ cerrado y $A$ compacto. Considera $\mathcal{C} = \{B_{i} \subset X \, | \, i \in \mathcal{I} \}$ una cubierta abierta de $B.$
Representación de una cubierta abierta de $B.$
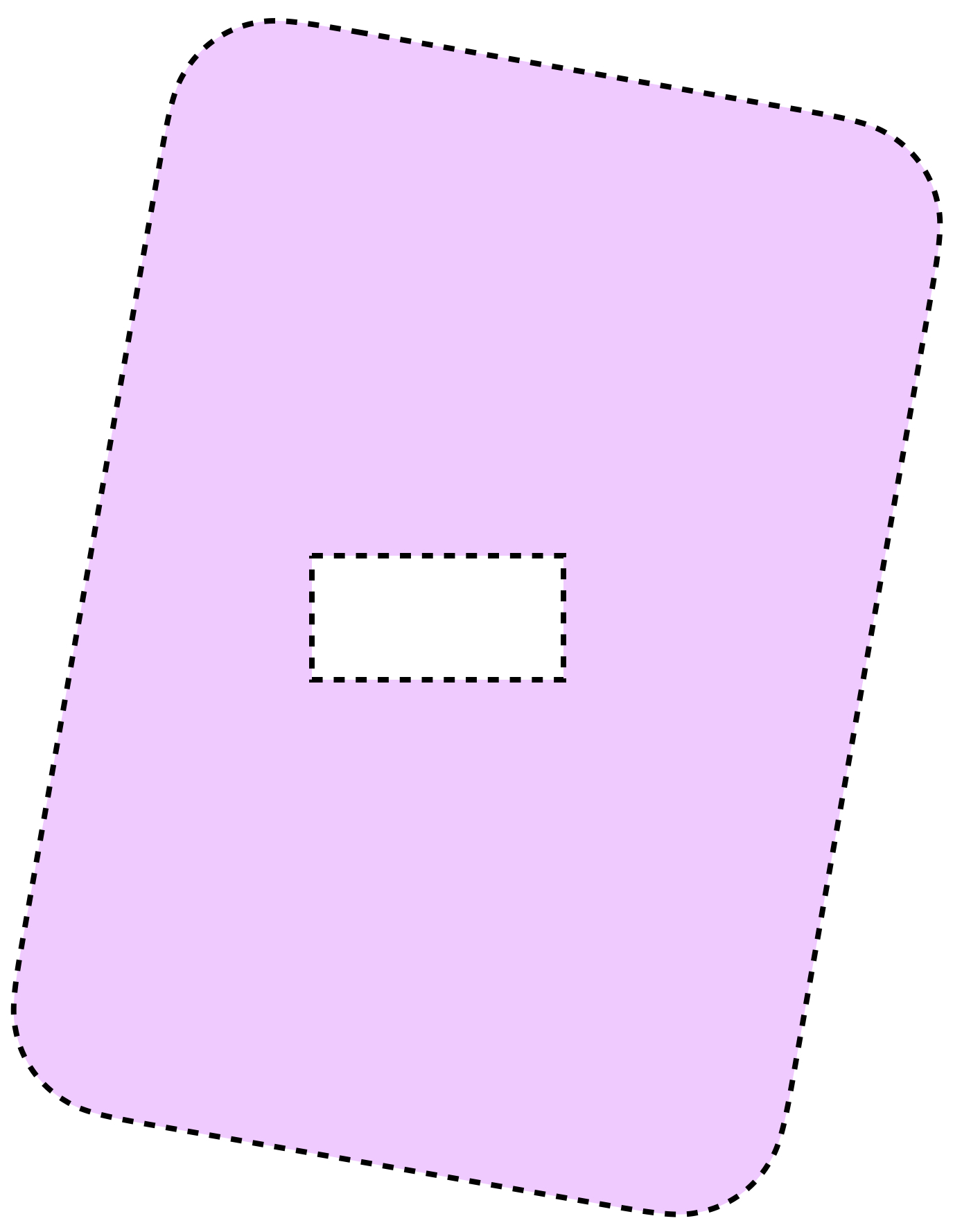
Como $B$ es cerrado, entonces el conjunto $X \setminus B$ es abierto.
$X \setminus B$ es abierto.
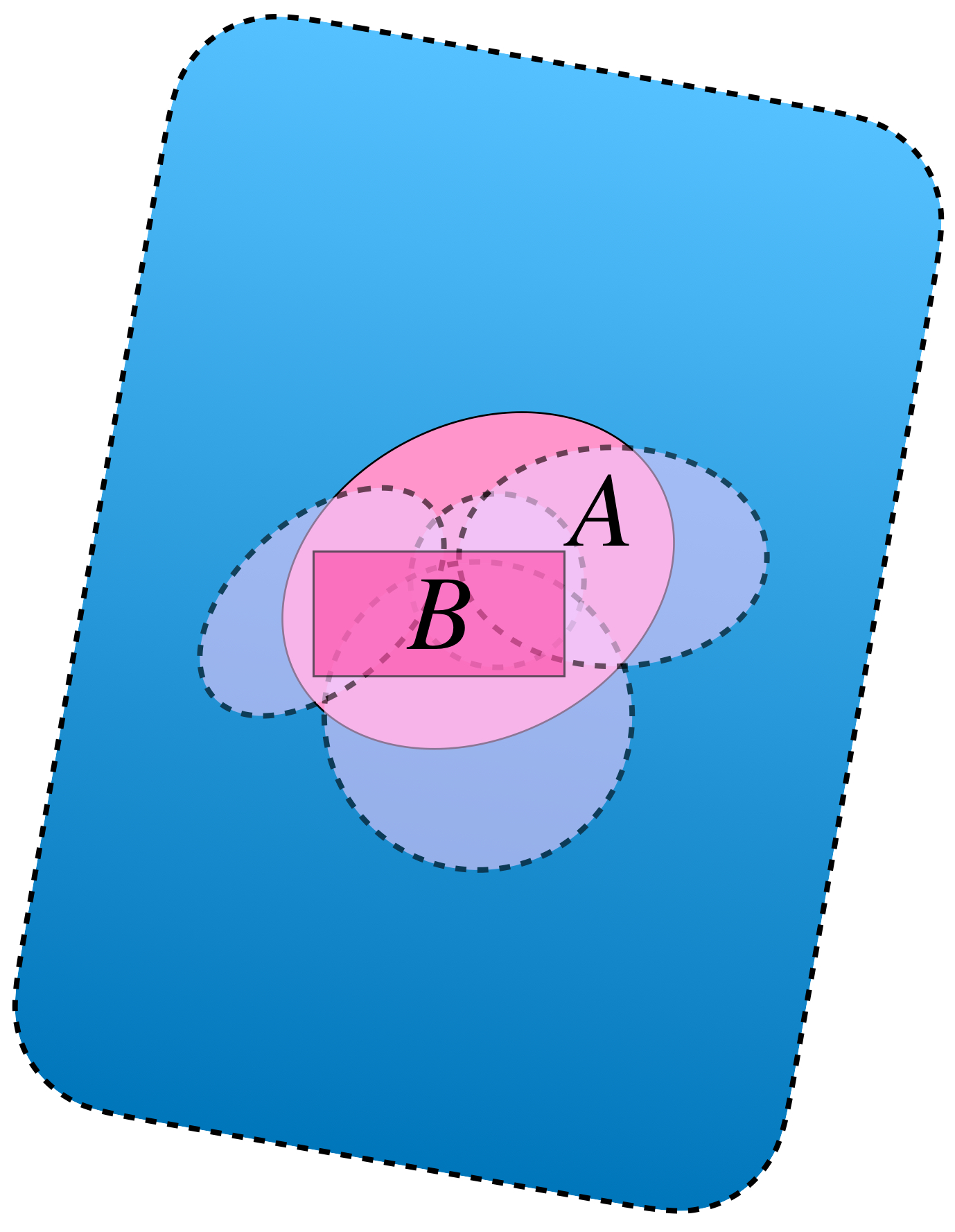
Dado que $B \subset A,$ si agregamos $X \setminus B$ a la cubierta de $B$ tenemos que $\mathcal{C} \cup \{X \setminus B\}$ es una cubierta abierta de $A.$
$\mathcal{C} \cup \{X \setminus B\}$ es una cubierta abierta de $A.$
Al ser el conjunto $A$ compacto, se sigue que esta cubierta tiene una subcubierta finita que satisface: $$B \subset A \subset B_{i_1} \cup…\cup B_{i_n} \cup (X \setminus B).$$ con $n \in \mathbb{N}.$
Por lo tanto $\mathcal{C’}=B_{i_1},…,B_{i_n}$ es una subcubierta finita de $\mathcal{C}$ lo cual concluye que $B$ es compacto.
La cubierta abierta de $B$ tiene una subcubierta finita.
Finalizamos esta sección con los siguientes resultados para así cumplir con una deuda pendiente correspondiente a la última proposición de La métrica de Hausdorff que decía que si $(X,d)$ es un espacio métrico compacto y $(A_n)_{n \in \mathbb{N}} \,$ una sucesión de subespacios compactos en él, se cumple que si $A_{n+1} \subset A_n$, entonces $A_n \to \underset{n \in \mathbb{N}}{\cap}A_n$ en $\mathcal{M}(X).$ Veremos que podemos hablar del conjunto límite porque no es vacío.
Teorema. Considera $ \{ A_{\alpha} \, | \, \alpha \in \mathcal{A} \}$ una colección de subconjuntos compactos de un espacio métrico $(X,d).$ Si ocurre que cualquier intersección finita de elementos de $\{A_{\alpha}\}$ es no vacía, entonces la intersección de todos los elementos también es no vacía. Es decir: $$\underset{\alpha \in \mathcal{A}}{\bigcap} \, A_{\alpha} \, \neq \emptyset$$
Demostración: Supón por el contrario que la intersección es vacía. Sea $A_1 \in \{A_{\alpha}\}$ entonces no existe punto de $A_1$ que pertenezca al mismo tiempo, a todos los elementos de $\{A_{\alpha}\}$ Sea $C_{\alpha} := X \setminus A_{\alpha}.$ Entonces $ \{ C_{\alpha} \, | \, \alpha \in \mathcal{A} \}$ es una cubierta abierta de $A_1$ que, por ser compacto, tiene una subcubierta finita, así: $A_1 \subset (C_{\alpha_1} \cup … \cup C_{\alpha_n})$ para algunos ${\alpha_1},…{\alpha_n}, \in \mathcal{A},$ de modo que para cada $x \in A_1, \, x \in C_{\alpha_i}$ para algún $i \in \{1,…,n\}$ lo que implica que $x \notin A_{\alpha_i}$ y también que $x \notin A_{\alpha_1} \cap … \cap A_{\alpha_n}.$ En consecuencia $A_1 \cap A_{\alpha_1} \cap … \cap A_{\alpha_n} = \emptyset$ lo cual es una contradicción a la hipótesis, por lo tanto $$\underset{\alpha \in \mathcal{A}}{\bigcap} \, A_{\alpha} \, \neq \emptyset$$
Corolario.Si $ \{ A_{n} \, | \, n \in \mathbb{N} \}$ es una colección de subconjuntos compactos no vacíos de un espacio métrico $(X,d)$ tales que para cada $n \in \mathbb{N} , \, A_n \supset A_{n+1}$ se cumple que $\underset{n \in \mathbb{N}}{\bigcap} \, A_n \neq \emptyset .$
Proposición. Sea $A$ un espacio métrico compacto, $(f_n)_{n \in \mathbb{N}} \,$ una sucesión de funciones continuas con $f_n:A \to \mathbb{R}, n \in \mathbb{N}$ tal que $(f_n)$ converge puntualmente a una función continua $f.$ Si para cada $x \in A$ y $n \in \mathbb{N} \, f_n(x) \geq f_{n+1}(x),$ entonces $(f_n)$ converge a $f$ uniformemente en $A.$
Demostración: Para cada $n \in \mathbb{N}$ definimos $g_n := f_n – f.$ Entonces $(g_n)_{n \in \mathbb{N}} \,$ es una sucesión de funciones continuas en $A.$ Es sencillo probar que $(g_n)_{n \in \mathbb{N}} \,$ converge puntualmente a $0.$
Sea $\varepsilon >0.$ Ahora, para cada $n \in \mathbb{N}$ definimos un conjunto con los puntos de $A$ que bajo la función $g_n \,$ quedan fuera de la bola de radio $\varepsilon$ con centro en $0.$ Formalmente:
Nota que este conjunto es complemento de la imagen inversa de la función continua $g_n \,$ en la bola abierta $B(0,\varepsilon).$ Por lo tanto $A_n$ es cerrado en $A.$ Esa propiedad se vio en Funciones continuas en espacios métricos. Arriba vimos que cada conjunto cerrado de un compacto hereda la compacidad, en consecuencia cada $A_n$ es compacto.
Nota además que para cada $n \in \mathbb{N}, \, A_{n+1} \subset A_n.$ La intersección de todos estos conjuntos es vacía, pues si existe $x_0 \in \underset{n \in \mathbb{N}}{\cap} \, A_n$ entonces para toda $n \in \mathbb{N}, \, g_n(x_0) \notin \, B(0,\varepsilon)$ lo cual no puede ser, pues $g_n(x_0) \to 0.$ A partir del corolario visto un par de lineas arriba se sigue que existe $N \in \mathbb{N}$ tal que $A_N$ es vacío. Entonces, para todo $k \geq N, \, A_k = \emptyset.$ Así para cada $a \in A$ se cumple que $0 \leq g_k(a) < \varepsilon.$ Por lo tanto $(f_n)$ converge a $f$ uniformemente en $A.$
Más adelante…
Conoceremos los efectos que producen algunas funciones al ser aplicadas en conjuntos compactos. ¿Será posible conservar la compacidad al enviar conjuntos de un espacio métrico a otro? ¿Qué propiedades tendrá la imagen de una función continua?
Tarea moral
Resuelve el ejercicio planteado arriba.
Prueba que un espacio discreto finito es compacto. ¿Es necesario que tenga asociada la métrica discreta?
Demuestra que cada subconjunto infinito de un conjunto compacto posee un punto de acumulación en el conjunto compacto.
Da un ejemplo de un conjunto $A$ que sea cerrado pero no acotado y una cubierta abierta y numerable de $A$ que no tenga una subcubierta finita.
Prueba que si $A$ es cerrado y $B$ es compacto, entonces $A \cap B$ es compacto.
Prueba que la intersección arbitraria de conjuntos compactos es compacta.
Demuestra que una sucesión de Cauchy en un conjunto compacto es convergente.
Sea $(X,d)$ un espacio métrico y $A \subset X$ un conjunto compacto. Demuestra que el subespacio $(A,d)$ es completo.
Ahora que hemos recordado las derivadas y de haber estudiado los teoremas fundamentales, podemos definir integrales inmediatas que surgen de estos temas.
La bondad de estos teoremas es que podemos encontrar formas y métodos de integración que se desprenden directamente de los procesos de derivación.
Para facilitar la notación de esta entrada, utilicemos la integral indefinida, es decir, sin considerar los límites de integración.
Recordemos que si tenemos una integral definida, tiene la siguiente representación:
Donde $F(x)$ es la integral de $f(x)$ y posteriormente se evalúa en los límites correspondientes.
En contraste con las integrales sin límites de integración o indefinidas, se verían de la siguiente manera:
$$\int f(x) \ dx = F(x) \ + \ C.$$
Ya que no tenemos límites, al momento de integrar encontramos una función que depende de nuestra variable pero podríamos tener una pérdida de información ya que, si recordamos las derivadas, la derivada de una constante es $0$, lo que, al momento de integrar esta derivada perdemos el valor de esta constante, (constante de integración).
Por ejemplo:
$$f(x) = x^2 + 3x + 5.$$
Si aplicamos derivamos esta función, tenemos lo siguiente.
$$\frac{d}{dx} f(x) = f'(x) = 2x + 3.$$
Lo que, al integrar esta derivada utilizando el teorema fundamental del cálculo, tenemos lo siguiente.
Pero, si integramos tal cual la derivada que se encontró, se tiene la siguiente integral.
$$\int 2x + 3 = x^2 + 3x. $$
Vemos que no es exactamente lo mismo. En realidad, lo único que difiere es en la constante y esto no nos genera mayor problema, ya que al considerar los límites de integración se puede ajustar.
Nota: Solo se puede ajustar mediante una constante. No se pueden añadir términos que dependan de la misma variable de la función.
Si falta una constante, no hay problema. La integral quedará de la siguiente forma:
$$\int 2x + 3 = x^2 + 3x + C.$$
Donde $C$ se le conoce como la constante de integración.
Entonces, tomando el ejemplo anterior, hay que identificar el valor de $C$, y ya solo se tendría que despejar.
$$ x^2 + 3x + 5= x^2 + 3x + C.$$
$$C = 5.$$
Entonces, por practicidad en la sección, utilizaremos la notación de la integral sin límites de integración sin olvidar la constante de integración.
Integral de una constante
$$\int z \ dx = z \ x +C.$$
En particular, si $z=1$.
$$\int \ dx = x + C.$$
Integral de potencias
Tendríamos funciones del estilo $f(x) = x^n$.
$$\int x^n \ dx = \frac{x^{n+1}}{n+1}; \ n \neq -1.$$
Integral de un cociente
Tendríamos funciones del estilo $f(x) = \frac{1}{x}$.
A partir de ahora podemos calcular integrales de forma inmediata, solo viendo la función sin necesidad de elaborar o desarrollar la definición.
Esto considerando que las funciones cumplen con los supuestos necesarios, como la continuidad de la función sobre el intervalo de integración.
Entonces, ¿Qué pasa si al momento de integrar, nuestro dominio presenta un problema? ¿Qué se hace si nuestra función original o la que encontramos después de realizar la integral, tiene puntos conflictivos, alguna discontinuidad o el rango de integración se vuelve infinito?
En la siguiente sección se verán las integrales impropias donde se explicará cual es el tratamiento correspondiente a este tipo de funciones o que hacer en esos casos.
Para este momento, se definió la integral definida, la integral indefinida y rememoramos de forma práctica las reglas de derivación.
Adicionalmente, en algunas de las entradas anteriores se ha mencionado la relación entre la diferencial y la integral, y esta relación se hace explícita en los teoremas fundamentales del cálculo.
Para poder ver y demostrar íntegramente estos teoremas que sustentan esta relación, es importante ilustrar de forma intuitiva la motivación, así como algunos posibles uso de ellos.
Intuición a los teoremas
Los teoremas fundamentales del cálculo mencionan la relación entre la integración y la diferenciación y, hasta cierto nivel, se puede observar que la integración es la función inversa una de la otra.
Entonces, para empezar a mencionar y observar la relación entre estos procesos podemos enumerar ejemplos de cada uno de ellos y comparar sus resultados.
Si definimos a $D$ como la función diferencial que se aplica a una función $f$ y que, al momento de aplicar la diferenciación a $f$ genera una nueva función $D(f)$, por ejemplo,
Por otro lado, si se define la operación $\int \limits_a$ como la función integral.
En otras palabras, el símbolo $\int \limits_a$ es la representación del operador integral, así como los símbolos $+, \ – \ , \times , \div $ son los correspondientes a la operación suma, resta, multiplicación y división.
Entonces, se define $G= \int \limits_a f$ donde $G$ es la función con regla de correspondencia $G(x) = \int \limits_a^x f$.
De esta forma, el dominio de $G$ queda definido por el conjunto de todas las $x$ para las cuales la integral queda definida, en otras palabras, el dominio de $G$ es el conjunto de todas las $x$ tales que $f$ es integrable sobre $[a,x]$ teniendo que $a < x$ o sobre $[x,a]$ si $x < a$.
Podemos ver los siguientes ejemplos sobre la aplicación de la integral en funciones:
Es decir, utilizando únicamente el operador sin límites de integración o siendo una integral indefinida:
\begin{align*} \int \limits_0 c \ dt =c \ I + C, \\ \int \limits_0 t \ dt = \frac{I^2}{2} + C, \\ \int \limits_0 4t^3 \ dt = I^4 + C . \end{align*}
No olvidemos que en integrales indefinidas, se tiene la constante de integración.
En los ejemplos presentado podemos observar que existe uno con su contraparte en las funciones, el primero y el tercero correspondiente, esto da pie en ver la relación entre estos operadores.
En este ejemplo se ve claramente que, al momento de integrar el resultado del valor de la integral, recuperamos la función original, previo a realizar la derivación.
Pero son funciones y procesos independientes, así que también aplica la observación de forma inversa.
Esto es que, al momento de derivar el resultado del proceso de integración, de igual forma se obtiene la función original.
Existen dos teoremas que demuestran esta relación, los cuales se desarrollarán en las siguientes entradas.
La derivada de la integral
Recordemos la notación de la integral indefinida que vimos al inicio de este capítulo. Se definió de la siguiente manera, utilizando el símbolo integral.
Lo que se verá en el primer teorema fundamental es que, si tenemos una función originada por una integral indefinida $ \phi (x) $ de una función continua $f(x)$, siempre existe la derivada $ \phi’ (x) $ y, además.
$$ \phi’ (x) = f(x).$$
Si se sustituyen los símbolos por la notación completa de la derivada y de la integral, se tiene lo siguiente.
$$\frac{d}{dx} \int \limits_a^x f(u)~du = f(x).$$
Aquí se puede observar que las operaciones son inversas, siempre y cuando se estén cumpliendo las hipótesis del teorema. Esto se puede demostrar utilizando el teorema del valor medio para la integral, ya que es una consecuencia de este teorema.
Ahora, si tomamos la diferencia de la integral indefinida valuada en los puntos extremos del intervalo y la dividimos por $h$, se ve de la siguiente manera.
$$\frac{\phi(x+h) \ – \ \phi(x)}{h} = \ f(\xi).$$
Y ahora, tomemos el límite haciendo que $h$ se vaya a $0$.
Si somos observadores, el lado izquierdo es la definición de la derivada, ya que, por hipótesis, la función $f$ es continua.
Ahora, uno pensaría que el límite en lado derecho no tiene sentido, ya que $\xi$ es un punto y $f$ solo está valuada en $\xi$ y no depende de $h$. Pero recordemos que la forma en identificar este punto $\xi$ es porque está dentro del intervalo $[x, x+h]$, de forma tal que, al considerar un limite haciendo que $h$ se vaya a $0$, el intervalo se reduce y colapsa en el punto $x$. Entonces el límite sí tiene sentido.
Y como ya vimos que el lado izquierdo es la definición de derivada y el derecho se colapsa el intervalo en $x$, lo anterior queda de la siguiente manera.
$$\phi'(x) = f(x).$$
$\square$
La función primitiva
El teorema muestra que la integral indefinida $ \phi (x) $, que es la integral de una función $f(u)$, cuyo límite superior depende de $x$ es una solución para el siguiente problema: Dada $f(x)$, determina una función $F(x)$ tal que.
$$F'(x) = f(x).$$
Para resolver este problema es necesario realizar el proceso contrario de la derivación. Con ello, se define como función primitiva de $f(x)$ o solamente primitiva de $f(x)$ a cualquier función $F(x)$ tal que $F'(x) = f(x)$.
Entonces, ocupamos la función $F(x)$ como la función primitiva de $f(x)$ y el proceso para determinar $f(x)$ es derivando la primitiva.
De forma que, tenemos la siguiente afirmación:
Toda integral indefinida $\phi(x)$ de la función $f(x)$ es una primitiva de $f(x)$.
Algo que hay que ponerle atención en la afirmación anterior es que dice «una«. Entonces se puede pensar que hay más de una función primitiva que al momento de derivar se encuentra la misma función para las diversas que hay.
Y aunque esto pueda parecer muy complicado, recordemos que la derivada de una constante se hace cero. Entonces, al momento de integrar cualquier función, se le puede adicionar la constante de integración de forma que ajuste con la información extra que nos dé el problema (esta idea se profundizará más adelante). De forma que, cada vez que se deriva una función de la misma forma excepto por una constante, se obtiene la misma función. Por poner un ejemplo:
$A_1 = x^2 + 3x + 4.$
$A_2 = x^2 + 3x \ – \ 5.$
Si nos damos cuenta, las funciones son diferentes salvo por la constante. Entonces, al momento de derivar se tiene lo siguiente.
$A’_1 = 2x +3.$
$A’_2 = 2x +3.$
Se obtiene la misma función. Entonces, si tomamos $f(x) = 2x+3$ y queremos encontrar su primitiva, esta sería:
$\phi(x) = x^2 + 3x + C.$
Pero teníamos 2 funciones, entonces.
$\phi_1(x) = x^2 + 3x + C_1.$
$\phi_2(x) = x^2 + 3x + C_2$
Por lo tanto, tenemos la siguiente afirmación.
La diferencia de dos funciones primitivas $F_1(x)$ y $F_2(x)$ de la misma función $f(x)$ siempre es una constante.
$$F_1(x) \ – \ F_2(x) = C_1 \ – \ C_2 = C.$$
Por lo tanto, si se tiene la función primitiva de una función $f(x)$, se pueden encontrar todas las demás a partir de la siguiente forma.
$$F(x) \ + \ C.$$
Por esto se dice que no hay una única forma función primitiva, con esta forma, se tienen una infinidad.
Más adelante…
Acabamos de ilustrar de forma sencilla, con ejemplos prácticos que se han visto, lo que implican los teoremas fundamentales.
En las entradas siguientes mostraremos a detalle cada uno de ellos y las aplicaciones que estos tienen.
Vale la pena mencionar que, por lo mismo que son fundamentales, su remembranza en diferentes asignaturas y áreas es basta por la importancia de los teoremas, así que escucharas de ellos un buen rato en tu carrera académica.