El desarrollo del cálculo está basado en gran medida en el sistema de números reales. Los números reales son aquellos que pueden ser expresados haciendo uso de decimales, como:
donde los puntos $\dots$ indican que la sucesión de decimales continúa expandiéndose para siempre. De este modo cada expansión decimal que nos podamos imaginar representa un número real.
Geométricamente los números reales pueden ser representados como puntos sobre una línea recta, la denominada recta real.
Sus propiedades se encuentran divididas en tres categorías: algebraicas, de orden y de completitud. En esta entrada comenzaremos revisando las propiedades algebraicas básicas relacionadas con las operaciones suma y multiplicación. Daremos un vistazo a los resultados derivados de ellas.
Propiedades básicas de los números reales
A continuación enlistaremos una serie de propiedades que cumplen respectivamente la suma y la multiplicación en el conjunto de números reales $\mathbb{R}$.
Definición (Propiedades básicas): Consideremos $\mathbb{R}$ y las operaciones suma $(+)$ y multiplicación $(\cdot)$, se cumple que:
S1.- Para cualesquiera $a,b\in \mathbb{R}$ se cumple que: $a+b \in \mathbb{R}$ (Cerradura de la suma).
S2.- Para cualesquiera $a,b\in \mathbb{R}$ se cumple que: $a+b = b+a$ (Conmutatividad de la suma).
S3.- Para cualesquiera $a,b,c\in \mathbb{R}$ se cumple que: $a + (b+c) = (a+b)+c$ (Asociatividad de la suma).
S4.- Existe $0\in \mathbb{R}$ tal que para cualquier $a\in \mathbb{R}$ : $a + 0 =0+a=a$ (Neutro aditivo).
S5.- Para cualquier $a\in \mathbb{R}$ existe $-a\in \mathbb{R}$ tal que: $a + (-a) = (-a)+ a = 0$ (Inverso aditivo).
M1.- Para cualesquiera $a,b\in \mathbb{R}$ se cumple que: $a\cdot b \in \mathbb{R}$ (Cerradura de la multiplicación).
M2.- Para cualesquiera $a,b\in \mathbb{R}$ se cumple que: $a\cdot b = b\cdot a$ (Conmutatividad de la multiplicación).
M3.- Para cualesquiera $a,b,c \in \mathbb{R}$ se cumple que: $a \cdot (b\cdot c) = (a\cdot b)\cdot c$ (Asociatividad de la multiplicación).
M4.- Existe $1\in \mathbb{R}$ tal que para cualquier $a\in \mathbb{R}$: $a \cdot 1 = 1\cdot a=a$ (Neutro multiplicativo).
M5.- Para cualquier $a \in \mathbb{R}$ con $a\neq 0$, existe $a^{-1} \in \r$ tal que: $a \cdot a^{-1} = a^{-1}\cdot a = 1$ (Inverso multiplicativo).
A.- $1\neq 0$ (El neutro aditivo es distinto del neutro multiplicativo).
D.- Para cualesquiera $a,b,c \in \mathbb{R}$ se cumple que: $a\cdot (b+c) = a \cdot b + a\cdot c$ (Ley distributiva).
Esta lista de propiedades serán nuestras «reglas del juego» con las cuales iremos probando los siguientes resultados. Aconsejamos tenerla disponible ya que haremos referencia a ella en todas las demostraciones siguientes.
Primeras observaciones
Proposición: Los neutros e inversos son únicos en $\mathbb{R}$. Es decir:
$0$ es único.
$1$ es único.
Para todo $a \in\mathbb{R}$, $-a$ es único.
Para todo $a \in\mathbb{R}$ y $a \neq 0$, $a^{-1}$ es único.
En esta ocasión demostraremos sólo los puntos 1 y 3. Se espera que el lector complete el resto de los puntos en la Tarea moral.
Demostración punto 1: Sea $a \in \mathbb{R}$. Supongamos que el $0$ no es único, entonces existe un $0^{*} \in \mathbb{R}$ tal que cumple la propiedad S4, en particular que: $a + 0^{*} = a = 0^{*}+a$ Y como $ a + 0 = a$ $$\Rightarrow a + 0 = a + 0^{*}$$
Nota: Cabe mencionar que $-a$ es el inverso aditivo respecto a $0$, por lo que en un principio $-a$ no tiene que ser inverso aditivo respecto de $0^{*}$.
Así tenemos que: \begin{align} &\Rightarrow (-a) + (a + 0) = (-a) + (a + 0^{*})\\ &\Rightarrow ((-a )+ a) + 0 = ((-a )+ a) + 0^{*}\\ &\Rightarrow 0 + 0 = 0 + 0^{*}\\ &\Rightarrow 0 = 0 + 0^{*}\\ &\Rightarrow 0 = 0^{*}\\ \end{align}
En $(1)$ sumamos $-a$ en ambos lados de la igualdad. Para $(2)$ aplicamos S3. Por la propiedad S5 en ambos lados de la igualdad se sigue $(3)$. Aplicando S4 para $0 +0$ en $(4)$. Volvemos a aplicar S4 para $0 +0^{*}$ en $(5)$. $\therefore \quad 0$ es único.
Demostraciónpunto 3: Sea $a \in \mathbb{R}$. Supongamos que el $-a$ no es único, entonces existe un $-a^{*} \in \mathbb{R}$ tal que cumple lo siguiente: $a + (-a^{*}) = 0$ Y como $ a + (-a) = 0$ $$\Rightarrow a + (-a) = a + (-a^{*})$$ Así tenemos que: \begin{align} & \Rightarrow (-a) + (a + (-a)) = (-a) + a + (-a^{*})\\ & \Rightarrow ((-a )+ a) + (-a) = ((-a )+ a) + (-a^{*})\\ & \Rightarrow 0 + (-a) = 0 +(-a^{*})\\ &\Rightarrow -a = – a ^{*}\\ \end{align}
En $(6)$ sumamos $-a$ en ambos lados de la igualdad. Para $(7)$ aplicamos S3. Por la propiedad S5 en ambos lados de la igualdad se sigue $(8)$. Aplicando S4 en ambos lados en $(9)$. $\therefore \quad -a$ es único.
$\square$
Algunos resultados
Proposición: Para $a,b \in \mathbb{R}$ se cumple lo siguiente:
$a \cdot 0 = 0$ .
$-a = (-1)(a)$ .
$-(-a) = a$ .
$(-a)(b)= – (ab)$ .
$(-a)(-b)= ab$ . Nota: Escribiremos $ab$ para referirnos al producto $a \cdot b$.
Demostración: 1. $P.d.$ $a \cdot 0 = 0$ .
Comencemos con el lado izquierdo de la igualdad: \begin{align*} a \cdot 0 = a \cdot (0+0) &\Rightarrow a \cdot 0 = a \cdot 0 + a \cdot 0\tag{por S4 y D}\\ &\Rightarrow a \cdot 0 + (-a\cdot 0) = (a \cdot 0 + a \cdot 0) + (-a \cdot 0)\tag{por sumar $-a\cdot 0$}\\ &\Rightarrow 0 = (a \cdot 0 + a \cdot 0) + (-a \cdot 0)\tag{por S5}\\ &\Rightarrow 0 = a \cdot 0 + (a \cdot 0 + (-a \cdot 0))\tag{por S3}\\ &\Rightarrow 0 = a \cdot 0 + 0\tag{por S5}\\ &\Rightarrow 0 = a \cdot 0\tag{por S4} \\ \end{align*} $$\therefore a \cdot 0 = 0$$
2. $P.d.$ $-a = (-1)(a)$ Observemos que si probamos que $a + ((-1)(a)) =0$ implicaría que $(-1)(a)$ es el inverso aditivo de $a$ que por lo visto anteriormente sabemos es único.
Así a partir del lado izquierdo de la igualdad tenemos:
Por lo que ya tenemos $a + ((-1)(a))=0$ . Y como ya probamos que el inverso aditivo es único concluimos $$-a = (-1)(a)$$.
3. $P.d.$ $-(-a) = a$ Vemos que si probáramos que $-(-a)$ es el inverso aditivo de $-a$ terminaríamos. \begin{align*} (-a)+(-(-a)) &= (-a)\cdot 1 + (-1)(-a)\tag{por M4 y 2.}\\ &= (-a)\cdot 1 + (-a)(-1)\tag{por M2}\\ &= (-a)(1+(-1)\tag{por D}\\ &=(-a)(0)\tag{por S5}\\ &=0\tag{por 2.}\\ \end{align*} Así obtenemos que: $$(-a)+(-(-a)) =0 \Rightarrow ((-a)+(-(-a)))+a= 0+a.$$
Por lo anterior se sigue que: \begin{align*} &\Rightarrow ((-a)+(-(-a)))+a= a\tag{por S4}\\ &\Rightarrow ((-(-a))+(-a))+a =a\tag{por S2}\\ &\Rightarrow (-(-a))+((-a)+a)=a\tag{por S3}\\ &\Rightarrow (-(-a))+ 0=a\tag{por S5}\\ &\Rightarrow -(-a)=a\tag{por S4} \end{align*} $$\therefore -(-a)=a$$
4. Tarea moral 5. Tarea moral
$\square$
Recuerda que el resto de los incisos se dejarán como ejercicios en la Tarea moral. Para realizarlos puedes hacer uso de todos los resultados probados en esta entrada, a menos que se indique lo contrario.
Tarea moral
Demuestra las siguientes propiedades:
$1$ es único en $\RR$.
Para todo $a \in\mathbb{R}$ y $a \neq 0$, $a^{-1}$ es único.
Sin usar el resultado $-(-a) = a$, demuestra que $-(-1) = 1$.
Para $a,b \in \mathbb{R}$ se cumple lo siguiente:
$(-a)(b)= – (ab)$
$(-a)(-b)= ab$
Más adelante
En la siguiente entrada continuaremos viendo resultados derivados de las propiedades de la suma y la multiplicación de los números reales por lo que nuestra primera lista será de suma utilidad.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada daremos una descripción alternativa de rectas: la forma baricéntrica. Esta manera de pensar nos ayuda a construir de manera muy rápida una recta que pase por dos puntos dados, o bien el segmento que une a dos puntos. Además, a través de ella podemos entender a las rectas desde un punto de vista más físico
Rectas en forma baricéntrica
En la forma paramétrica de una recta por $P$ con dirección $Q$, tenemos que $P$ y $Q$ juegan papeles diferentes. En la forma que exploraremos ahora, se tendrá que juegan papeles iguales. De manera intuitiva, la forma que definiremos a continuación nos ayuda a construir fácilmente rectas que pasen por dos puntos dados.
Definición. Sean $P$ y $Q$ dos puntos distintos en $\mathbb{R}^2$. La recta en forma baricéntrica por $P$ y $Q$ es el conjunto
$ l := \{ rP+sQ : r,s \in \mathbb{R} \text{ y } r+s=1 \}.$
Ahora tenemos dos parámetros $r$ y $s$ que nos ayudan a ubicar un punto en la recta en cualquiera de las dos direcciones. Puedes pensar que la restricción $r+s=1$ es la que hace que nos quedemos en la recta. Además, podemos pensar a $r$ y $s$ como «pesos» que nos dicen qué tan cerca estamos de $P$ y de $Q$. Intuitivamente si $s > r$ , entonces el punto $X$ de la recta se encuentra más cerca del punto $Q$ y viceversa, si $r > s$, entonces el punto $X$ de la recta está más cercano a $P$. Esto es sólo intuitivo pues aún no tenemos una definición formal de distancia, pero más adelante retomaremos esto para formalizarlo.
Utiliza el siguiente interactivo para variar los valores de la coordenada baricéntrica $s$ de la recta (recuerda que r=1-s) y ubicar el punto $X$ en la recta que depende de estos valores.
Interpretación física
Ya que definimos las coordenadas baricéntricas, hablemos un poco de la interpretación física de esta con la cuál la idea de «peso» que le asignamos a estas coordenadas toma más sentido. Pensemos a la recta como una barra rígida sobre la cual está distribuida una masa unitaria (esto es que la masa en total es 1). El punto de equilibrio estará dado por las coordenadas baricéntricas correspondientes a las masas.
Ahora que estamos hablando de masas, resulta que podemos asociarle una fuerza a cada una para comprender mejor esta interpretación física. Retomando lo de hace unos párrafos, si $s> r$, entonces la fuerza asociada a $s$ será mayor a la asociada a $r$ ($F_s > F_r$) y si tenemos una de nuestras coordenadas baricéntricas negativas, podemos pensar entonces en una fuerza que va en sentido contrario a la positiva. Si pensamos en la fuerza gravitacional, un signo menos en nuestras coordenadas se podría visualizar como algo jalando hacia arriba.
Apoyate del interactivo anterior para comprender mejor esta idea y analiza el siguiente ejemplo:
Ejemplo: Sea $s=0.3$ y $r=0.7$, nota que el punto está más cercano de $P$.
Relación entre rectas paramétricas y rectas baricéntricas
En nuestro modelo ya definimos dos «tipos» de rectas: las rectas paramétricas y las rectas baricéntricas. Sería muy mala noticia que hayamos definido objetos geométricos diferentes, es decir, que hubiera algún objeto geométrico que sí fuera recta paramétrica pero que no fuera recta baricéntrica. O viceversa. Afortunadamente esto no es así. Todas las rectas paramétricas se pueden expresar de manera baricéntrica y todas las rectas baricéntricas se pueden expresar de manera paramétrica.
Demostrar esto formalmente nos lleva a argumentos de teoría de conjuntos. Veamos un ejemplo.
Proposición. Toda recta en forma paramétrica se puede expresar en forma baricéntrica.
Demostración. Tomemos la recta con forma paramétrica por $P$ y dirección $Q$:
$$\ell=\{P+rQ:r\in\mathbb{R}\}.$$
Tenemos que encontrar una manera de expresarla en forma baricéntrica. Recordemos que la intuición de la forma baricéntrica es que pasa por dos puntos que le demos, así que nos conviene proponer dos puntos en $\ell$. Uno de ellos es $P$ (con $r=0$) y otro es $P+Q$ (con $r=1$). Ya tenemos entonces nuestra línea baricéntrica candidata:
$$m=\{rP+s(P+Q): r,s \in \mathbb{R} \text{ y } r+s=1\}.$$
Debemos demostrar que $\ell=m$. Esta es una afirmación de igualdad de dos conjuntos, así que hay que hacer una doble contención.
Un punto en $\ell$ es de la forma $P+rQ$, que se puede reescribir como $(1-r)P+r(P+Q)$. Aquí tanto $1-r$ como $r$ son reales y suman $1$, así que este punto está en $m$. Esto muestra que $l\subseteq m$.
Ahora tomemos un punto en $m$. Es de la forma $rP+s(P+Q)$ en donde $r,s$ son reales de suma $1$. De esta manera, $s=1-r$, de modo que podemos reescribir:
$$ rP+s(P+Q) =rP+(1-r)(P+Q)=P+(1-r)Q.$$
Esto es justo una de las expresiones que está en $\ell$. Concluimos que $m\subseteq \ell$ y por lo tanto que $\ell=m$.
$\square$
Una demostración similar muestra que toda recta en forma baricéntrica se puede expresar en forma paramétrica.
Segmentos y rayos
Hay algunas cosas que es más cómodo trabajar usando una forma de las rectas u otra. Por ejemplo, la definición de segmentos es muy fácil de dar pensando en forma baricéntrica.
Definición. El segmento entre dos puntos $P$ y $Q$ del plano es el conjunto:
La definición es prácticamente igual a la de recta en forma baricéntrica, pero limitando los valores de $r$ y $s$ a números no negativos.
Por otro lado, la definición de rayo es más fácil darla pensando en forma paramétrica.
Definición. El rayo desde un punto $P$ en dirección $Q$ es el conjunto:
$$ \overrightarrow{PQ}:=\{P+rQ: r\geq 0\}.$$
En este caso tenemos prácticamente la definición de recta en forma paramétrica, pero limitando el parámetro $r$ a números no negativos.
Postulados 1 y 3 de Euclides
Si recuerdas, en entradas anteriores se habló de que con esta «nueva» construcción de la geometría (la forma analítica), los postulados de Euclides podían ser demostrados. Ha llegado el momento en el que demostraremos una proposición que fusiona a los postulados 1 y 3.
Proposición. Para cualesquiera dos puntos $P$ y $Q$, se puede trazar el segmento de recta que los une y este segmento se puede prolongar indefinidamente a una recta.
Demostración. Ya dimos una definición de segmento. Notemos que en esta definición tenemos que sus extremos se dan precisamente con $r=0, s=1$, que corresponde al punto $Q$ y con $r=1,s=0$, que corresponde al punto $P$. Además, dicho segmento se queda contenido en la recta baricéntrica por $P$ y $Q$, pues en ella se permiten $r$ y $s$ arbitrarios de suma $1$, mientras que en el segmento sólo se permiten los no negativos.
De esta manera, la recta baricéntrica por $P$ y $Q$ es justo la prolongación del segmento que buscamos. Se prolonga indefinidamente al tomar valores de $r>1$ y valores de $r<0$ tan lejanos como queramos (y la $s$ correspondiente para que sume $1$). Al igual que en el caso paramétrico, se puede mostrar que todos estos puntos son distintos para valores distintos de $r$.
$\square$
Más adelante…
Hasta ahora hemos avanzado lo suficiente para hablar en entradas próximas de algo que se asomaba desde los postulados de Euclides, la intersección de rectas y las rectas paralelas.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
A partir de la forma baricéntrica de una recta, muestra cómo proponer su forma paramétrica $l= \{ Q+r(P-Q): r \in \mathbb{R} \}$. Haz una demostración por doble contención de que esas rectas son iguales.
Considera la siguiente recta en forma paramétrica: $L= \{ (5,3)+r(-7,2) : r \in \mathbb{R} \}$. Da una forma baricéntrica para $L$.
Para asegurarte que entendiste la interpretación física, realiza los siguientes ejercicios:
Imagina que tienes una barra rígida de 2 metros de longitud sobre la cuál tienes colgadas dos masas (una en cada extremo), una de 40 kg y otra de 10 gk. ¿cuáles son las coordenadas baricéntricas del punto de apoyo o de equilibrio de esta barra?
Si ahora sabes que el punto de apoyo se encuentra en uno de los extremos de la barra rígida y quieres levantar los 40 kg con la fuerza de otra masa de 10 kg, ¿dónde debes colocar la masa para que esto sea posible? Realiza un dibujo.
Dado dos puntos $X$ y $Y$ se define su punto medio como el punto $\frac{X+Y}{2}$. Considera los puntos $A=(-2,9)$, $B=(7,-1)$ y $C=(3,5)$. Encuentra el punto medio $L$ de $B$ y $C$. Encuentra el punto medio $M$ de $C$ y $A$. Encuentra el punto medio $N$ de $A$ y $B$. Da expresiones paramétricas y baricéntricas para las rectas $AL$, $BM$ y $CN$.
Para los puntos del problema anterior encuentra ecuaciones para todos los segmentos y rayos que puedas definir.
Todas las verdades de las matemáticas están vinculadas entre si. – Adrien-Marie Legendre
Introducción
Hemos estudiado algunas propiedades de las soluciones de una ecuación diferencial, estas funciones son expresiones analíticas que nos son útiles para describir una solución de una ecuación diferencial, sin embargo no siempre es necesario obtener dicha expresión analítica para lograr describir las soluciones. En este entrada haremos un análisis geométrico (o cualitativo) sobre ecuaciones diferenciales ordinarias de la forma
$$\dfrac{dy}{dx} = f(x, y(x)) \label{1} \tag{1}$$
Campos de pendientes
Recordemos que geométricamente la derivada $\dfrac{dy}{dx}$ de una función derivable $y = y(x)$ corresponde a la pendiente de las rectas tangentes en cada punto de la gráfica de la función $y(x)$, este resultado nos será de utilidad para intentar describir cualitativamente las soluciones de una ecuación diferencial de la forma normal (\ref{1}).
Definición: La función $f$ de una ecuación diferencial en su forma normal (\ref{1}) se llama función pendiente o función razón.
De acuerdo a la definición de solución de una ecuación diferencial, la función $y(x)$ es necesariamente derivable y por tanto continua en un intervalo $\delta$, esto nos garantiza que la curva solución en $\delta$ no tiene cortes y debe tener una recta tangente en cada punto $(x, y(x))$.
Si la función $y(x)$ es solución, entonces tiene una gráfica en el plano $XY$, la gráfica corresponde a la curva solución y la pendiente en cada punto está dada por
$$m = \dfrac{dy}{dx} = f(x, y)$$
Es así que para cada punto $(x, y)$ en el plano $XY$ se le puede asociar una número dado por la función razón que corresponderá a la pendiente de la recta tangente de una curva solución que pasa por ese punto $(x, y)$.
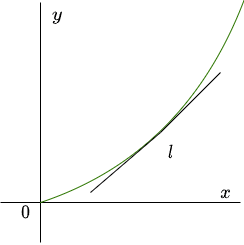
Definición: El valor $f(x, y)$ que la función $f$ le asigna al punto $(x, y)$ representa la pendiente de una recta y la visualización de dicho valor corresponderá a un segmento de recta llamado elemento lineal.
Elemento lineal $l$ sobre un punto de la curva solución.
Por lo tanto, podemos construir en el plano $XY$ un conjunto de elementos lineales dados por el valor de la función razón en cada punto $(x, y)$. Veamos un ejemplo.
Ejemplo: Visualizar los elementos lineales de la ecuación diferencial
$$\dfrac{dy}{dx} = x -y$$
Solución: En este caso la función razón es
$$f(x, y) = x -y$$
$x$ y $y$ pueden tomar cualquier valor en $ \mathbb{R}$. En la siguiente tabla tenemos algunos valores para $x$ y $y$. En la primera fila tenemos los valores de $x$ en el intervalo $(-4, 4)$ en pasos de una unidad, mientras que en la primer columna tenemos los valores de $y$ en el intervalo $(-4, 4)$ en pasos de una unidad, el resto de valores corresponde al valor de la función razón $f(x, y) = x -y$ evaluada en los valores correspondientes. Por ejemplo si $x = -2$ y $y = 4$, entonces
$$f(x, y) = x -y = -2 -4 = -6$$
tal como se indica en la tabla.
Algunos valores de la función $f(x, y) = x -y$.
Con ayuda de esta tabla podemos construir un conjunto de elementos lineales con pendiente según el valor de la función razón (recordemos que una recta de $45°$ tiene pendiente $m = 1$).
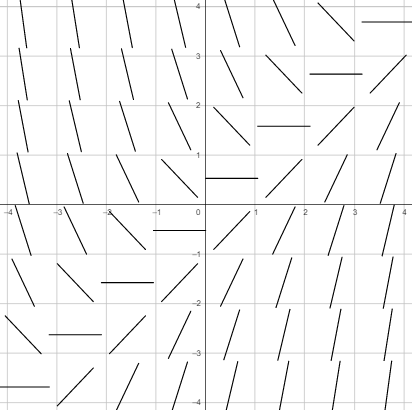
Elementos lineales de la ecuación diferencial $\dfrac{dy}{dx} = x -y$.
Aumentando el número de valores para $x$ y $y$ en los rangos $(-4, 4)$ se puede obtener un conjunto mayor de elementos lineales.
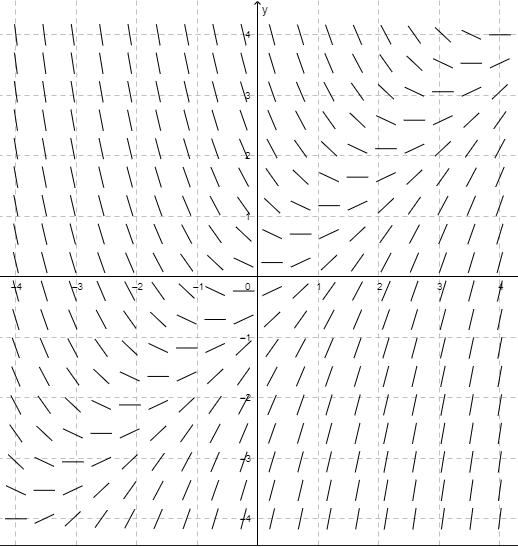
Conjunto mayor de elementos lineales de la ecuación diferencial $\dfrac{dy}{dx} = x -y$.
Es posible notar un patrón en esta última imagen. Anteriormente mencionamos que el valor de la función razón $f(x, y)$ es el valor de la pendiente de la recta tangente en un punto $(x, y)$ de la curva solución de la ecuación diferencial (\ref{1}), en este caso los elementos lineales corresponden a las rectas tangentes de las curvas solución de la ecuación diferencial
$$\dfrac{dy}{dx} = x -y$$
Es decir, los elementos lineales son tangentes a funciones $y(x)$ ¡que son solución de la ecuación diferencial!, basta trazar curvas a lo largo de los elementos lineales para hallar gráficamente las soluciones.
$4$ curvas solución de la ecuación diferencial $\dfrac{dy}{dx} = x -y$.
Ya vimos que una ecuación diferencial puede tener infinitas soluciones, o bien una familia de soluciones, en este caso, en la gráfica se muestran $4$ curvas solución correspondientes a $4$ soluciones $y = y(x)$ particulares, cada una se obtiene de distintas condiciones iniciales.
Lo importante que debemos rescatar es que, a pesar de no tener la forma explícita (o implícita) de la función solución $y = y(x)$, gráficamente ¡ya conocemos las posibles gráficas de las curvas solución de la ecuación diferencial dada!. También es importante notar que el signo de la pendiente nos dice si la curva es creciente o decreciente, esto debido al resultado de cálculo en donde si $\dfrac{dy}{dx} > 0$ o $\dfrac{dy}{dx} < 0$ para toda $x$ en un intervalo $\delta$, entonces la función derivable $y = y(x)$ es creciente o decreciente en $\delta$, respectivamente.
Como ejercicio moral verifica que la solución general de la ecuación diferencial dada es
$$y(x) = x -1 + \dfrac{c}{e^{x}}$$
Posteriormente usa un graficador de funciones y traza la gráfica de la solución general dándole valores arbitrarios a la constante $c$ y compara los resultados con los obtenidos en la imagen anterior.
De acuerdo a la imagen se puede notar que las $4$ curvas solución que se muestran corresponden a los valores iniciales
Definición: Un bosquejo con pequeños elementos lineales trazados en diversos puntos del plano $XY$ para mostrar la pendiente de la curva solución en el punto correspondiente se llama campo de pendientes o campo de direcciones de la ecuación diferencial (\ref{1}).
Las imágenes anteriores corresponden al campo de pendientes de la ecuación diferencial
$$\dfrac{dy}{dx} = x -y$$
Un campo de pendientes indica el flujo de las soluciones y facilita el trazo de cualquier solución particular, la dirección del campo indica el aspecto o forma de una familia de curvas solución de la ecuación diferencial dada, esto permite observar a simple vista aspectos cualitativos de la solución, por ejemplo regiones en el plano donde la solución presenta un comportamiento poco común.
En este contexto una curva solución también es llamada curva integral.
Definición: Una curva integral es una curva en el plano $XY$, tal que es tangente al campo de direcciones en cada punto de la curva.
Método de las isóclinas
Ahora somos capaces de esbozar campos de pendientes de ecuaciones diferenciales de la forma (\ref{1}), sin embargo es un proceso muy tardado si se piensa hacer a mano ya que hay que ir evaluando punto a punto del plano para obtener el valor de la pendiente en dicho punto y así poder dibujar un elemento lineal, esto puede ser mucho más rápido si se utilizan programas computacionales que lo realicen.
Existe un método que nos permite dibujar elementos lineales de forma eficiente sin necesidad de ir evaluando punto a punto, este método es conocido como el método de las isóclinas.
Definición: Una isóclina para la ecuación diferencial (\ref{1}) es un conjunto de puntos en el plano $XY$ donde todas las soluciones tienen la misma pendiente $m = \dfrac{dy}{dx}$.
En otras palabras, una isóclina es una curva de nivel de la función $f(x, y)$, es decir
$$f(x, y) = k \label{2} \tag{2}$$
donde $k$ es una constante arbitraria, si sustituimos (\ref{2}) en (\ref{1}), obtenemos
$$\dfrac{dy}{dx} = k \label{3} \tag{3}$$
Con esta ecuación vemos que en efecto para todas las soluciones $y = y(x)$ va a haber puntos donde la pendiente $\dfrac{dy}{dx}$ sera la misma, una constante.
Con este método sólo basta encontrar las isóclinas de una ecuación diferencial y sobre ellas dibujar elementos lineales que tengan la misma pendiente obteniendo así el campo de pendientes y por tanto las curvas solución. Para que quede más claro construyamos las isóclinas de la ecuación diferencial del ejemplo anterior.
Ejemplo: Hallar las isóclinas y el campo de pendientes de la ecuación diferencial
$$\dfrac{dy}{dx} = x -y$$
Solución: Comencemos por igualar la función razón a una constante.
$$\dfrac{dy}{dx} = x -y = k$$
Despejemos la función dependiente $y$ en términos de la variable independiente y la constante.
$$y = y(x) = x -k$$
Es claro que es la ecuación de una recta, para cada valor arbitrario de $k$ se obtiene una recta distinta, lo importante es que a lo largo de toda esa recta hay elementos lineales con la misma pendiente, sólo basta evaluar un punto de cada isóclina en la función razón y obtendremos el valor de la pendiente para toda la isóclina.
Isóclinas de la ecuación $\dfrac{dy}{dx} = x -y$.
En la imagen vemos que a lo largo de cada isóclina (en este caso rectas marcadas de verde) los elementos lineales tienen la misma pendiente recuperando así el campo de pendientes que habíamos obtenido anteriormente.
$\square$
Este método es muy útil si lo que queremos es esbozar un campo de pendientes a mano. Una vez obtenido el campo de pendientes procedemos a dibujar las curvas solución como lo hicimos con anterioridad.
Método de Euler
El análisis geométrico que acabamos de hacer está íntimamente relacionado con un método numérico fundamental para aproximar soluciones de una ecuación diferencial de la forma (\ref{1}) acompañada de una condición inicial, dicho método es conocido como método de Euler. Consideremos el problema con condición inicial
Debido a que $f(x, y)$ es dada, entonces podemos trazar su campo de pendientes en el plano $XY$, esto nos permite colocarnos en el punto $(x_{0}, y_{0})$ y comenzar a dar pequeños pasos dictados por las tangentes de dicho campo.
Comenzamos por elegir un tamaño de paso $\Delta x$ pequeño de tal manera que la pendiente de la solución aproximada se actualice cada $\Delta x$ unidades de $x$, es decir, en cada paso nos movemos $\Delta x$ unidades a lo largo del eje $x$. El tamaño de $\Delta x$ determina la exactitud de la solución, así como el número de cálculos que son necesarios para obtener la aproximación.
Imaginemos que nos colocamos en el punto $(x_{0}, y_{0})$, el primer paso es hacia el punto $(x_{1}, y_{1})$, donde
$$x_{1} = x_{0} + \Delta x \label{5} \tag{5}$$
El punto $(x_{1}, y_{1})$ se encuentra sobre la línea que pasa por $(x_{0}, y_{0})$ y cuya pendiente esta dada por el campo de pendiente en dicho punto, o bien, por $f(x_{0}, y_{0})$. Una vez que estemos en $(x_{1}, y_{1})$ repetimos el procedimiento, damos nuevamente un paso cuyo tamaño a lo largo del eje $x$ es $\Delta x$ y cuya dirección esta determinada por el campo de pendientes en $(x_{1}, y_{1})$, esto nos permitirá llegar al punto $(x_{2}, y_{2})$, donde
$$x_{2} = x_{1} + \Delta x \label{6} \tag{6}$$
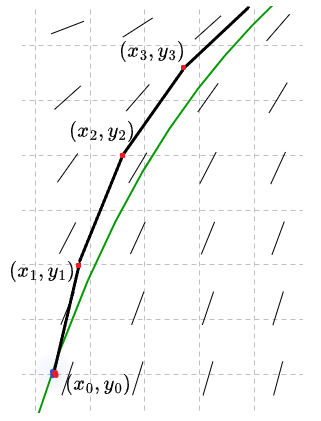
El punto $(x_{2}, y_{2})$ está sobre el segmento de línea que comienza en $(x_{1}, y_{1})$ y tiene pendiente $f(x_{1}, y_{1})$. Repetimos este procedimiento para llegar al punto $(x_{3}, y_{3})$, tal como se ilustra en la siguiente figura.
Gráfica de una solución y su aproximación usando el método de Euler.
En la figura vemos en verde la gráfica de una solución y en segmentos negros los pasos que el método de Euler establece para aproximarnos a la solución. Geométricamente, el método genera una secuencia de pequeños segmentos de línea que conectan $(x_{n}, y_{n})$ con $(x_{n + 1}, y_{n + 1})$. Notemos que en casa paso cometemos un error, si el tamaño de $\Delta x$ es suficiente pequeño, los errores no resultarán demasiado grandes conforme avanzamos y la gráfica resultante será cercana a la solución buscada.
Para llevar a cabo el método de Euler, necesitamos una fórmula que determine $(x_{n + 1}, y_{n + 1})$ a partir de $(x_{n}, y_{n})$. Al especificar el tamaño del paso $\Delta x$ determinamos que, de forma general
$$x_{n + 1} = x_{n} + \Delta x \label{7}, \tag{7}$$
Para obtener $y_{n + 1}$ a partir de $(x_{n}, y_{n})$ usamos la ecuación diferencial. La pendiente de la solución de la ecuación (\ref{1}) en el punto $(x_{n}, y_{n})$ es $f(x_{n}, y_{n})$, el punto $(x_{n + 1}, y_{n + 1})$ se determina suponiendo que éste se encuentra sobre la línea que pasa por $f(x_{n}, y_{n})$.
Podemos determinar $y_{n + 1}$ de la siguiente fórmula de pendiente.
Por lo tanto, dada la condición inicial $y(x_{0}) = y_{0}$ y el tamaño del paso $\Delta x$, el punto $(x_{n + 1}, y_{n + 1})$ se determina a partir del punto precedente $(x_{n}, y_{n})$ usando la ecuación diferencial para determinar valor de la pendiente $f(x_{n}, y_{n})$ y utilizando las ecuaciones (\ref{7}) y (\ref{9}).
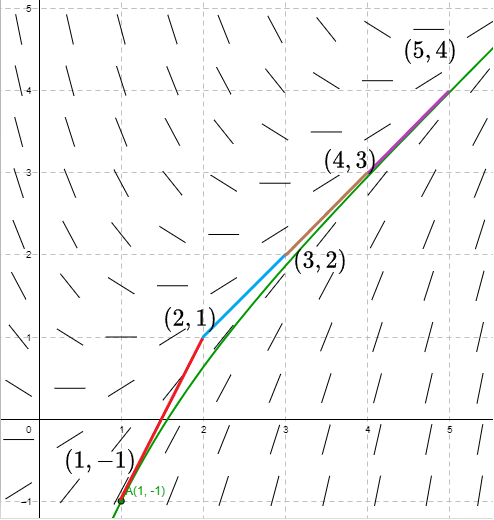
Ejemplo: Determinar una aproximación de la solución del siguiente PVI:
$$\dfrac{dy}{dx} = x -y, \hspace{1cm} y(1) = -1$$
Solución: Ya conocemos el campo de pendientes de la ecuación diferencial $\dfrac{dy}{dx} = x -y$. En este caso buscamos una aproximación a la solución particular que pasa por el punto $(x_{0}, y_{0}) = (1, -1)$. Para usar el método de Euler, propongamos un paso de unidad 1, es decir, $\Delta x = 1$. La función razón es
$$f(x, y) = x -y$$
Entonces,
$$f(x_{0}, y_{0}) = f(1, -1) = 1 -(-1) = 2$$
Sustituyamos en las ecuaciones (\ref{7}) y (\ref{9}):
Este proceso se sigue indefinidamente hasta hallar una gráfica aproximada de la solución buscada. En la siguiente figura se muestra la curva solución y los pasos obtenidos usando el método de Euler.
Aproximación de la curva solución.
$\square$
Dos casos especiales
Hemos trabajado con la ecuación diferencial
$$\dfrac{dy}{dx} = f(x, y(x))$$
Es posible que ocurra que la función razón sólo dependa de la variable dependiente $y(x)$, o sólo de la variable independiente $x$, es decir, tener las ecuaciones diferenciales
$$\dfrac{dy}{dx} = f(y) \label{10} \tag{10}$$
o
$$\dfrac{dy}{dx} = f(x) \label{11} \tag{11}$$
Más adelante veremos que estas ecuaciones son más fácil de resolver analíticamente debido a que son lo que se conoce como ecuaciones separables, pero por ahora vamos a hacer un análisis cualitativo como lo hemos estado haciendo en esta entrada.
Campo de pendientes para $\dfrac{dy}{dx} = f(x)$
El hecho de tener la ecuación diferencial
$$\dfrac{dy}{dx} = f(x)$$
en su forma normal nos permite reconocer que la pendiente de un elemento lineal en cualquier punto es la misma que la de cualquier otro punto con la misma coordenada $x$.
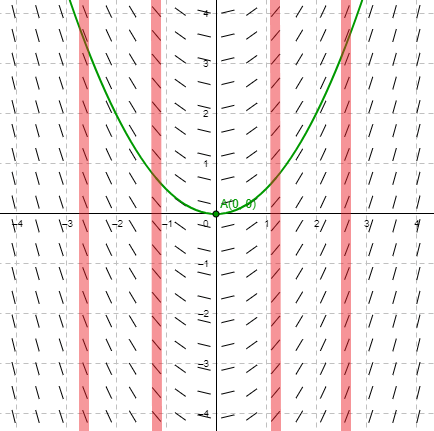
Campo de pendientes de la ecuación diferencial $\dfrac{dy}{dx} = x$.
En la imagen tenemos como ejemplo el campo de pendientes de la ecuación diferencial
$$\dfrac{dy}{dx} = f(x) = x$$
La curva verde representa una curva solución y notamos que a lo largo de las líneas verticales (líneas rojas) todos los elementos lineales tienen la misma pendiente.
Geométricamente podemos decir que en un campo de pendientes si los elementos lineales sobre cada línea vertical del dominio en consideración son paralelos, entonces la ecuación diferencial correspondiente es de la forma (\ref{10}).
Campo de pendientes para $\dfrac{dy}{dx} = f(y)$
En el caso en el que la función razón sólo depende de la variable dependiente $y$ los elementos lineales de un campo de pendientes van a tener la misma pendiente en dos puntos diferentes con la misma coordenada $y$, es decir, el campo de pendientes es paralelo a lo largo de cada línea horizontal.
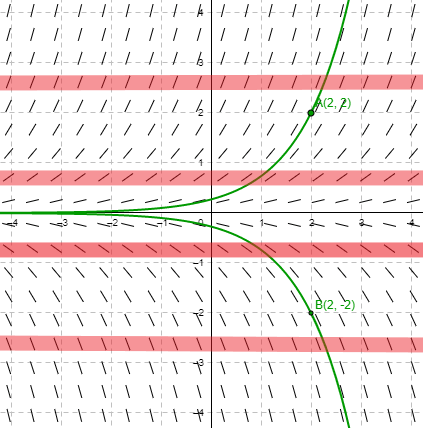
Campo de pendientes de la ecuación $\dfrac{dy}{dx} = y$.
En la imagen tenemos como ejemplo el campo de pendientes de la ecuación diferencial
$$\dfrac{dy}{dx} = f(y) = y$$
Las curvas verdes corresponden a soluciones de la ecuación, mientras que las líneas rojas sólo intentan hacer notar que las pendientes de los elementos lineales para un valor de $y$ son las mismas.
Hasta aquí concluimos la entrada, en la siguiente continuaremos explorando más sobre la teoría cualitativa de este tipo de ecuaciones diferenciales.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Esbozar el campo de pendientes de las siguientes ecuaciones diferenciales. Hacerlo a mano en una hoja de papel usando el método de las isóclinas y posteriormente verifica tu resultado usando algún programa computacional. Una vez construido el campo de pendientes trazar tres curva solución aproximadas, donde cada una pase por cada uno de los puntos indicados.
Considerando el ejercicio anterior, en cada ecuación diferencial dada elegir una condición inicial y usando el método de Euler determinar una solución aproximada. Se recomienda calcular al menos 5 puntos.
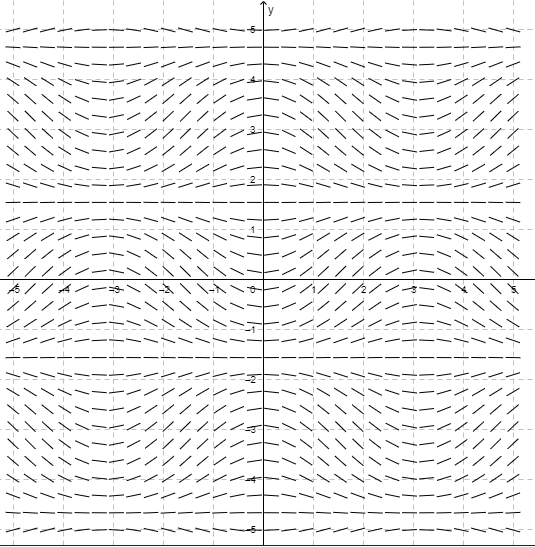
Dados los siguientes campos de pendientes, determinar la opción qué indica la ecuación diferencial que corresponde al campo de pendientes. Justificar la respuesta.
Campo de pendientes.
a) $\dfrac{dy}{dx} = \sin(x) + \cos(x)$; $\hspace{0.7cm}$ b) $\dfrac{dy}{dx} = \sin(x) \cos(x)$; $\hspace{0.7cm}$ c) $\dfrac{dy}{dx} = 2\sin(x)$
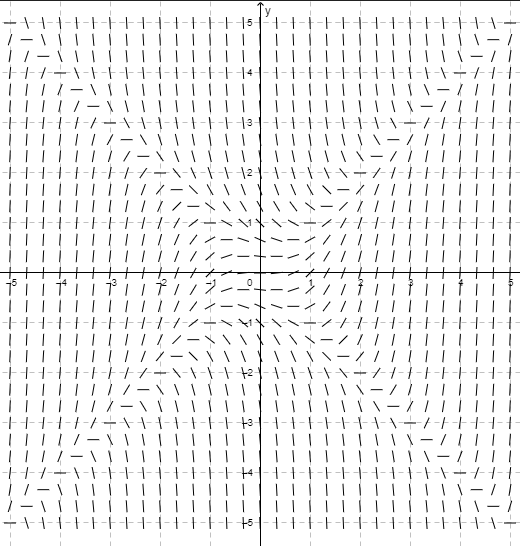
Campo de pendientes.
a) $\dfrac{dy}{dx} = x^{2} + y^{2}$; $\hspace{0.7cm}$ b) $\dfrac{dy}{dx} = 5y^{2}$; $\hspace{0.7cm}$ c) $\dfrac{dy}{dx} = x^{2} -y^{2}$
Más adelante…
En la siguiente entrada continuaremos con las descripciones cualitativas de las soluciones de una ecuación diferencial, en particular estudiaremos con mayor detalle las ecuaciones de la forma
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Anteriormente revisamos una definición intuitiva del límite con la finalidad de facilitar la comprensión de la definición formal. En esta entrada se dará la definición formal, así como algunos ejemplos para que el concepto sea comprendido en su totalidad.
Definición formal de límite
Retomemos la idea intuitiva a la que llegamos al final de la entrada anterior: logramos que $f$ se aproxime arbitrariamente, $\varepsilon$, a $L$ siempre que logremos que $x$ esté lo suficientemente cerca, $\delta$, de $x_0$ sin ser $x_0.$
Observación. Notemos que la última parte la podemos expresar como $0<|x-x_0|< \delta$, pues al pedir que la distancia entre $x$ y $x_0$ sea mayor que $0$ se captura la idea de que $x \neq x_0$.
Es importante resaltar que estamos dando por hecho que se puede evaluar la función $f$ en valores de $x$ cercanos a $x_0$. Es por ello que se presenta la siguiente definición.
Definición. Sea $ A \subset \mathbb{R}$. Un punto $x_0 \in \mathbb{R}$ es un punto de acumulación de $A$ si para todo $\delta > 0$ existe al menos un punto $x \in A$, $x \neq x_0$, tal que $|x-x_0| < \delta$.
Dada la definición anterior, si consideramos una función $f: A \to \mathbb{R}$, para calcular el límite, y asegurar que podemos evaluar $f$ en valores $x$ cercanos a $x_0$, deberemos pedir que $x_0$ sea punto de acumulación del dominio de la función, $A$. Con esto, tenemos todos los elementos para dar la definición de límite.
Definición. Sean $A \subset \mathbb{R}$ y $x_0$ un punto de acumulación de $A$. Para una función $f: A \to \mathbb{R}$, decimos que $L$ es el límite de $f$ en $x_0$ si para todo $\varepsilon > 0$ existe algún $\delta > 0$ tal que, para todo $x \in A$, si $0<|x-x_0|< \delta$, entonces $|f(x)-L|< \varepsilon.$
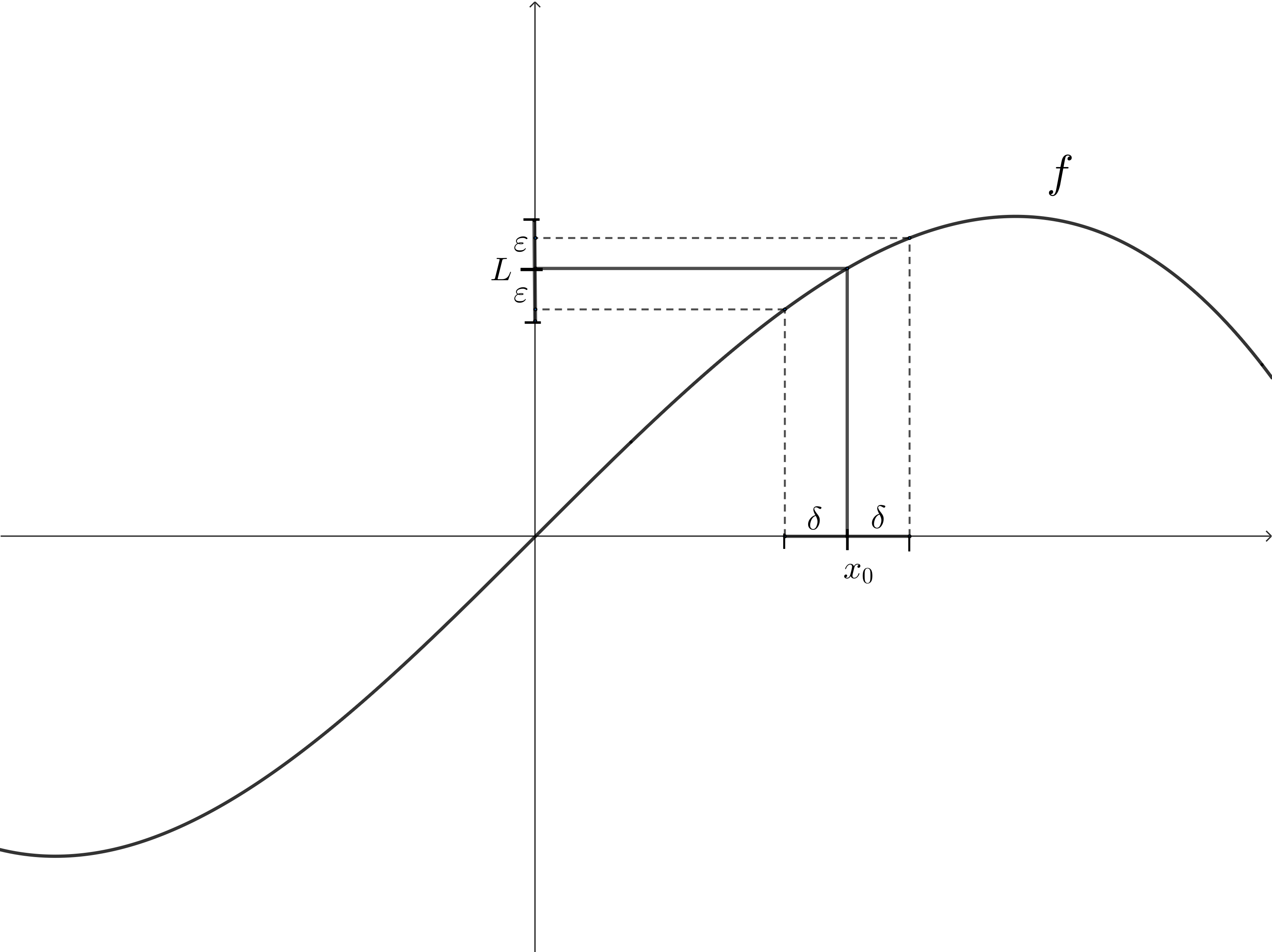
A continuación tenemos una imagen que nos permitirá visualizar la definición:
En la imagen podemos ver que si definimos un valor arbitrario $\varepsilon >0$, entonces lo que buscamos es un valor positivo $\delta$, tal que si $x$ está a una distancia menor que $\delta$ con respecto a $x_0$, entonces eso implique que $f(x)$ esté a una distancia menor que $\varepsilon$ con respecto a $L.$
A continuación revisaremos un ejemplo sencillo aplicando la definición.
Ejemplo 1. Demuestra que $$\lim_{x \to -1} \frac{x^2-5x-6}{x+1} = -7.$$
Demostración. Sea $\varepsilon >0$. Notemos que si $x \neq -1$, entonces
Hagamos algunos comentarios respecto a la demostración. Como primer paso, establecimos un valor arbitrario positivo para $\varepsilon$. Después hicimos algunas manipulaciones algebraicas que nos permitieron simplificar la expresión original en una más simple con la cual logramos encontrar el valor de $\delta$ que sería útil, en este caso, ese valor fue justamente el mismo que $\varepsilon$.
Entonces si $|x-2| < 1$, por (1) y (2), tenemos lo siguiente \begin{align*} \left\lvert f(x) – \frac{7}{4}\right\rvert & = \frac{1}{|4x|} \cdot |x-2| \\ \\ & < \frac{1}{4} \cdot |x-2|.\\ \end{align*}
Previamente acotamos $|x-2|$ por el valor $1$, pero de la última expresión se sigue que deberemos acotarlo también por $4 \varepsilon$ para llegar a nuestro objetivo, tomemos así $\delta = min\{1, 4 \varepsilon\}.$
Si $0<|x- 2| \leq \delta$. Es decir, si $|x- 2| \leq 1$ y $|x- 2| \leq 4\varepsilon$, entonces $$\left\lvert f(x) – \frac{7}{4}\right\rvert < \frac{1}{4} |x-2| \leq \frac{1}{4} \cdot 4\varepsilon.$$ $$ \therefore \left\lvert f(x) – \frac{7}{4}\right\rvert < \varepsilon.$$
$\square$
Nuevamente haremos énfasis en los pasos generales de la demostración. Iniciamos dando un valor de $\varepsilon$ arbitrario, y la tarea es encontrar el valor $\delta >0$ que acote la distancia entre $x$ y $x_0 = 2$ de tal manera que los valores de la función $f$ se aproximen a $L$ lo suficiente para que su distancia sea menor que $\varepsilon.$
Trabajemos ahora sobre el siguiente ejemplo.
Ejemplo 3. Para todo $x_0 \in \mathbb{R}$ se tiene que $$\lim_{x \to x_0} x^2 = x_0^2.$$
Demostración.
Sea $\varepsilon > 0$ y $x_0 \in \mathbb{R}$. Notemos que
$|x^2 – x_0^2| = |x-x_0||x+x_0|.$
Haciendo uso de una manipulación análoga al del ejemplo anterior, podemos ver que si $|x-x_0| < 1$, entonces
Cabe resaltar que en el ejemplo anterior usamos la propiedad $|x_0|-|x| \leq |x-x_0|$, ya que la intención es acotar al recíproco de $x$. En este caso, se emplea $|x|-|x_0| \leq |x-x_0|$, puesto que buscamos acotar directamente a $x$.
En esta ocasión queremos que $|x-x_0| < 1$ y, por la última expresión, también queremos que $|x-x_0| <\frac{\varepsilon}{1+2|x_0|}$, definimos así $\delta = min \{ 1, \frac{\varepsilon}{1+2|x_0|} \}$. Si $0 < |x-x_0| < \delta$, entonces
Esto implica que $$|x^2-x_0^2| < \varepsilon.$$ $$\therefore \lim_{x \to x_0} x^2 = x_0^2.$$
$\square$
Unicidad del límite de una función
Después de haber revisado estos ejemplos, la definición de límite de una función (también llamada definición épsilon-delta), estamos listos para revisar la primera propiedad del límite.
Proposición. El límite de una función en $x_0$ es único, es decir, si $f$ tiende a $L$ en $x_0$ y $f$ tiende a $L’$ en $x_0$, entonces $L = L’.$
Demostración. Sea $\varepsilon > 0$. Como $f$ tiende a $L$ y $L’$ en $x_0$, entonces para $\frac{\varepsilon}{2} > 0$ existen $\delta_1 > 0$ y $\delta_2 > 0$ tales que
Como $\varepsilon$ es un valor arbitrario positivo, podemos concluir que $L-L’ = 0$, es decir, $L=L’.$
$\square$
Más adelante…
En la siguiente entrada revisaremos con detalle varias propiedades que tienen los límites para lo cual haremos uso de una bella relación existente entre el límite de una sucesión y el de una función. Una vez revisadas estas propiedades, el cálculo de los límites se hará considerablemente más simple.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Usando la definición épsilon-delta, demuestra lo siguiente:
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Durante las dos últimas entradas conocimos un poco de la geometría de las soluciones a ecuaciones diferenciales de primer orden, aún sin conocerlas explícitamente. En esta entrada resolveremos por primera vez de manera analítica algunas de ellas. En particular, resolveremos ecuaciones del tipo $a_{0}(t)\frac{dy}{dt}+a_{1}(t)y=0$, que llamaremos ecuaciones homogéneas. Primero encontraremos la solución a la ecuación de forma general, y posteriormente resolveremos algunos ejemplos particulares.
Ecuaciones lineales homogéneas
En el primer video resolvemos la ecuación lineal homogénea de primer orden en su forma general.
En el segundo video ponemos en práctica lo aprendido en el video anterior para resolver un par de ecuaciones diferenciales.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Encuentra la solución general a la ecuación $\frac{dy}{dt}+e^{t}y=0$.
Resuelve el problema de condición inicial $t^2\frac{dy}{dt}+\sqrt{t}y=0$ ; $y(0)=5$. Encuentra el intervalo donde la solución está definida.
Antes de resolver analíticamente, esboza las soluciones a la ecuación $\frac{dP}{dt}=kP$, con $k>0$, $P(t) \geq 0, \forall t \in \mathbb{R}$, que modela el crecimiento de una población. (Para mayor referencia a esta ecuación revisa la primer entrada de este curso). Si no recuerdas cómo hacerlo, te recomiendo revisar la entrada anterior.
Encuentra la solución general a la ecuación anterior.
Compara las soluciones que dibujaste en el tercer ejercicio con las soluciones que encontraste en el cuarto ejercicio. ¿Qué observas?
Más adelante
Ya sabemos cómo resolver ecuaciones homogéneas. Ahora vamos a ver el otro lado de la moneda, es decir, vamos a resolver ecuaciones no homogéneas.
En la siguiente entrada estudiaremos dos métodos para resolver éste tipo de ecuaciones: primero por medio de una función que llamaremos factor integrante, y más adelante por el método de variación de parámetros en el cual las ecuaciones homogéneas nos serán de mucha ayuda.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»