
Introducción
En esta entrada usaremos la forma normal de la recta para demostrar dos teoremas conocidos como teoremas de concurrencia de líneas.
Medianas y baricentro
Cerremos la entrada con la enunciación y la demostración del siguiente teorema.
Teorema. Dado un triángulo PQR, sus tres medianas concurren en un punto que divide al segmento dentro del triángulo (de cada mediana) en proporción 1:2.
Demostración.
Para empezar la demostración, construimos un triángulo PQR.
Para construir las medianas, primero localizamos los puntos medios de cada segmento (A, B, C) cuyas coordenadas baricéntricas están dadas por
\begin{align*}
A&=\frac{1}{2}P + \frac{1}{2}Q \\
B&=\frac{1}{2}Q + \frac{1}{2}R \\
C&=\frac{1}{2}R + \frac{1}{2}P \\
\end{align*}
Ya que queremos que se encuentren justo en el punto medio de cada segmento.
Al trazar la mediana del segmento $PQ$ tenemos lo siguiente
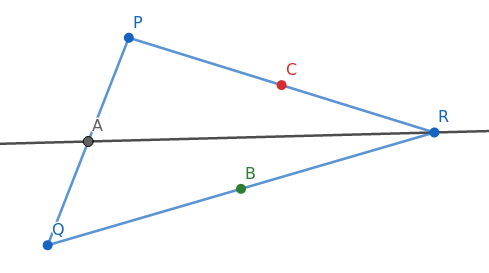
La manera en la que procederemos a partir de ahora, es que localizaremos el punto en el segmento de cada mediana que lo divide en proporción 1:2 esperando llegar a que los tres puntos son el mismo.
Comencemos con el punto $G$ que divide al segmento $AR$ en proporción 1:2, esto es que $G$ sea:
$G=\frac{1}{3}R+\frac{2}{3}A $
AL sustituir el valor de $A$, tenemos como resultado
\begin{align*}
G&=\frac{1}{3}R+\frac{2}{3}\left( \frac{1}{2}P + \frac{1}{2}Q \right) \\
&= \frac{1}{3}R+\frac{1}{3}P+\frac{1}{3}Q \\
\end{align*}
Lo que puede ser replicado para cada segmento. Para el $BP$ se tiene
\begin{align*}
G’ &=\frac{1}{3}P+\frac{2}{3}B \\
&=\frac{1}{3}P+\frac{2}{3} \left( \frac{1}{2}Q + \frac{1}{2}R \right) \\
&= \frac{1}{3}P+\frac{1}{3}Q+\frac{1}{3}R \\
&= \frac{1}{3}R+\frac{1}{3}P+\frac{1}{3}Q \\
\end{align*}
Y para el $CQ$
\begin{align*}
G»&=\frac{1}{3}Q+\frac{2}{3}C \\
&=\frac{1}{3}Q+\frac{2}{3} \left( \frac{1}{2}R + \frac{1}{2}P \right) \\
&= \frac{1}{3}Q+\frac{1}{3}R+\frac{1}{3}P \\
&= \frac{1}{3}R+\frac{1}{3}P+\frac{1}{3}Q \\
\end{align*}
$\therefore$ $G=G’=G»$
Acabamos de demostrar que los puntos que dividen a cada mediana en una proporción 1:2 son el mismo para cada una, por lo que las tres medianas concurren en este punto.
$\square$
A este punto $G$ se le conoce como el baricentro del triángulo, y podrás imaginar después de que discutimos la idea física de estas coordenadas, que $G$ corresponde al centro de masa o punto de equilibrio del triángulo.
Utiliza el siguiente interactivo para asegurarte de que esto es válido con cualquier triángulo, puedes mover los puntos P,Q y R y aún existirá el punto $G$ de intersección de las 3 medianas. Si te da curiosidad, puedes usar la herramienta de distancia de GeoGebra para medir la longitud de cada segmento de la mediana y verificar que efectivamente, está en una relación 1:2 con respecto al punto $G$.
Teoremas de concurrencia
Para poder realizar las demostraciones, definiremos a la altura de un triángulo como la recta que pasa por uno de sus vértices y es ortogonal al lado opuesto. Ahora, enunciemos y demostremos el primer teorema.
Teorema 1. Las alturas de un triángulo son concurrentes.
Demostración
Comencemos esta demostración con un interactivo que ilustre un triángulo y sus alturas.
Las rectas verdes son las alturas del triángulo y en el interactivo es bastante evidente que concurren en un punto y que esto pasa para cualquier triángulo (para comprobarlo puedes mover con tu cursor los vértices para modificar el triángulo). Sin embargo en este curso de geometría analítica, queremos demostrarlo de manera algebraica.
Para esta demostración algebraica, notemos que los vértices del triángulo son $A$, $B$, y $C$ y las alturas asociadas a cada vértice son $a$, $b$ y $c$ respectivamente. Escribamos la forma normal de cada una de estas rectas (alturas). Para $a$ tenemos
$a$ : $(C-B) \cdot x = (C-B) \cdot A$
pues la recta $a$ es ortogonal al lado del triángulo que pasa por los vértices $C$ y $B$, por lo que este lado tiene dirección $(C-B)$ y pasa por el punto $A$. De manera análoga, sabemos que $b$ es perpendicular a la recta que pasa por $A$ y $C$ con dirección $A-C$ y pasa también por el punto $B$, así
$b$ : $(A-C) \cdot x = (A-C) \cdot B$
Y de la misma forma para $c$ tenemos
$c$ : $(B-A) \cdot x = (B-A) \cdot C$
Nota que si sumamos las dos primeras ecuaciones, obtendremos la ecuación negativa de $c$:
\begin{align*}
(C-B) \cdot x + (A-C) \cdot x &= (C-B) \cdot A + (A-C) \cdot B \\
(C-B + A-C) \cdot x & = C \cdot A – B \cdot A + A \cdot B – C \cdot B\\
(-B+A) \cdot x & = C \cdot A – A \cdot B + A \cdot B – C \cdot B\\
(-B+A) \cdot x & = C \cdot A – C \cdot B \\
(-B+A) \cdot x & =(A – B) \cdot C
\end{align*}
Esto es importante, pues si tomamos un elemento en la intersección de las alturas $a$ y $b$ ($x \in a \cap b$), entonces también está en la suma y está última nos da como resultado el negativo de la ecuación de la recta $c$, por lo tanto $x \in c$.
De manera análoga, si sumamos $b$ y $c$ obtenemos
$(B-C) \cdot x = (B- C) \cdot A$
que corresponde a la ecuación negativa de $a$, por lo que si $x \in b \cap c$, entonces $x$ está en la suma de las ecuaciones y por tanto está en $a$.
Para completar la demostración, deberíamos realizar el mismo procedimiento al sumar las ecuaciones de $c$ y $a$ y confirmar que un punto en su intersección está en $b$.
$\therefore$ si dos de las alturas se intersectan, entonces la tercera recta también y en el mismo punto.
$square$
Teorema 2.
Demuestra que las tres mediatrices de un triángulo son concurrentes.
Demostración
Para comenzar la demostración, recordemos que la mediatriz de un segmento es la recta que es ortogonal a este y pasa por su punto medio.
De nuevo, es claro que las tres mediatrices del triángulo con vértices $D$, $E$ y $F$ concurren en un punto. Denominamos a los puntos medios de cada lado como $a$, $b$ y $c$, que es por donde pasan las mediatrices.
Ahora, para comenzar la parte algebraica de la demostración, definamos en su forma normal la primera miediatriz $i$. Siguiendo la idea de la demostración pasada, $i$ es ortogonal a $(E-F)$ y pasa por el punto $a$ por lo que
$i$ : $(E-F) \cdot x = (E-F) \cdot a$
De la misma manera, $j$ es ortogonal a $(D-E)$ y pasa por $b$, así
$j$ : $(D-E) \cdot x = (D-E) \cdot b$
Y para $k$ tenemos
$k$ : $(F-D) \cdot x = (F-D) \cdot c
Sigamos la intuición de la demostración anterior y sumemos las expresiones de $i$ y $j$
\begin{align*}
(E-F) \cdot x + (D-E) \cdot x &= (E-F) \cdot a + (D-E) \cdot b \\
E \cdot x – F \cdot x + D \cdot x – E \cdot x &= E \cdot a – F \cdot a + D \cdot b – E \cdot b \\
D \cdot x- F \cdot x &=E \cdot a – F \cdot a + D \cdot b – E \cdot b
\end{align*}
Para seguir avanzando con nuestra demostración, debemos recordar que $a,$, $b$ y $c$ son los puntos medios de cada lado del triángulo, por lo que podemos expresarlos en términos de los vértices de la siguiente manera
$a=\frac{F+E}{2}$, $b=\frac{E+D}{2}$ Y $c=\frac{D+F}{2}$
Con esto en mente, podemos sustituir $a$ y $b$ en la ecuación anterior y desarrollar
$D \cdot x- F \cdot x = E \cdot \left( \frac{F+E}{2} \right) – F \cdot \left( \frac{F+E}{2} \right) + D \cdot \left( \frac{E+D}{2} \right) – E \cdot \left( \frac{E+D}{2} \right) $
Al realizar todo el desarrollo obtenemos que
$D \cdot x- F \cdot x = \frac{1}{2}( D \cdot D – F \cdot F)$
Ahora, en la demostración pasada queríamos llegar a algún múltiplo de $k$ para demostrar que las 3 rectas se intersectaban, siguiendo con esa lógica, desarrollemos el lado derecho de $k$ tomando en cuenta a $c$ como punto medio de un lado
\begin{align*}
(F-D) \cdot c &= (F-D) \cdot \frac{D+F}{2} \\
&= \frac{1}{2} (F-D) \cdot (D+F) \\
&= \frac{1}{2}(F \cdot D + F \¢dot F – D \cdot D – F \cdot D) \\
&= \frac{1}{2}(F \cdot F – D \cdot D)
\end{align*}
Que es justamente el negativo de lo que obtuvimos arriba, por lo que al sumar las expresiones de $i$ y $j$ obtenemos el negativo de la expresión de $k$. Así, si un punto $x$ está en $ i \cap j$, entonces está en la suma y por lo tanto está en $k$.
El procedimiento es análogo para cada uno de los casos faltantes.
$\square$
Para concluir esta entrada, denotaremos al punto en el que concurren las mediatrices como circuncentro.
Más adelante…
En las próximas entradas discutiremos la forma normal de un elemento geométrico en el espacio $\mathbb{R}^3$ que no será la recta y hablaremos de la norma de un vector, que de cierta manera apareció en nuestras demostraciones pero no lo hemos discutido con formalidad hasta ahora.
Tarea moral
- Completa los casos faltantes en la demostración del primer teorema.
- Completa los casos faltantes en la demostración del segundo teorema.
- Encuentra el circuncentro del triángulo que tiene como vértices los puntos $(5,3)$, $(2,-1)$ y $(8,0)$.