Bienvenidos a la última entrada del curso. En esta ocasión nos enfocaremos en demostrar y analizar el teorema de Poincaré – Bendixson en el plano que dice lo siguiente:
Teorema (Poincaré – Bendixson): Sea $\Omega$ un conjunto límite en un sistema de dos ecuaciones $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$. Si $\Omega$ es no vacío, cerrado y acotado, y tal que no contiene puntos de equilibrio del sistema, entonces es una órbita cerrada (función periódica).
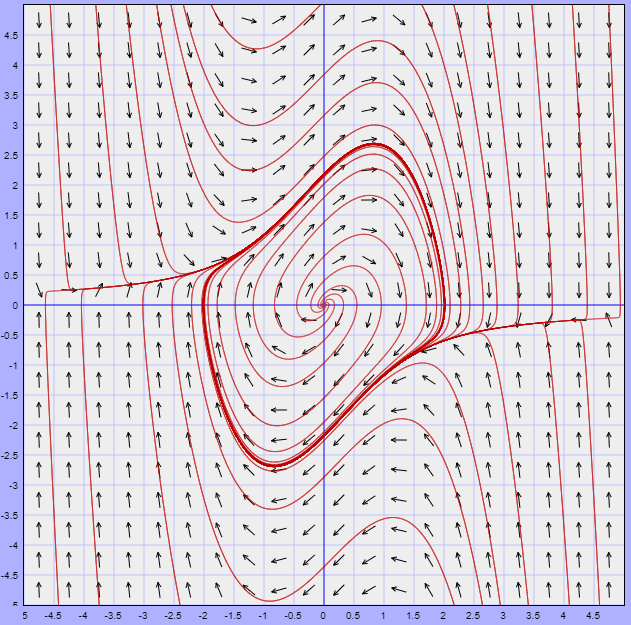
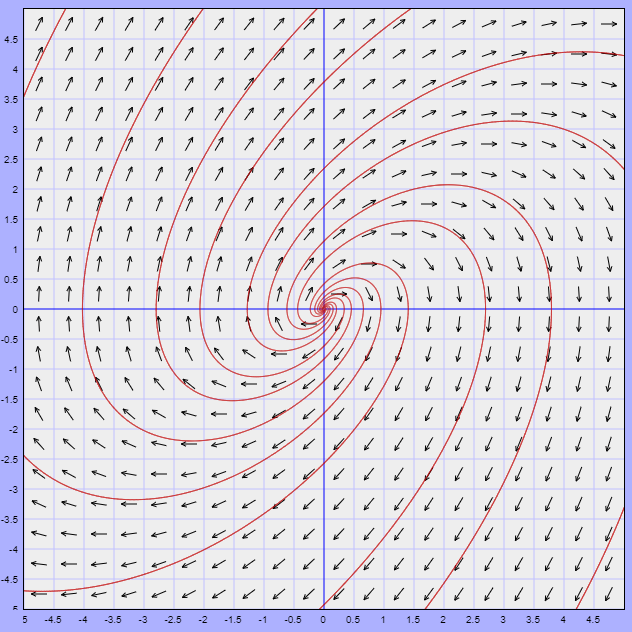
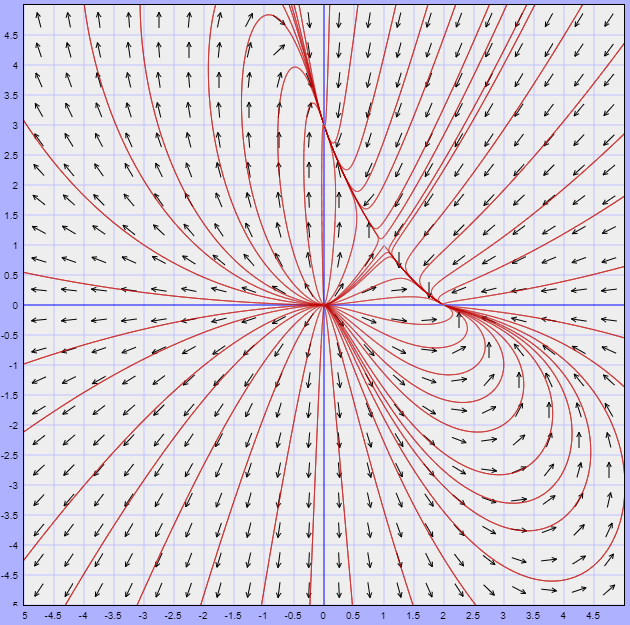
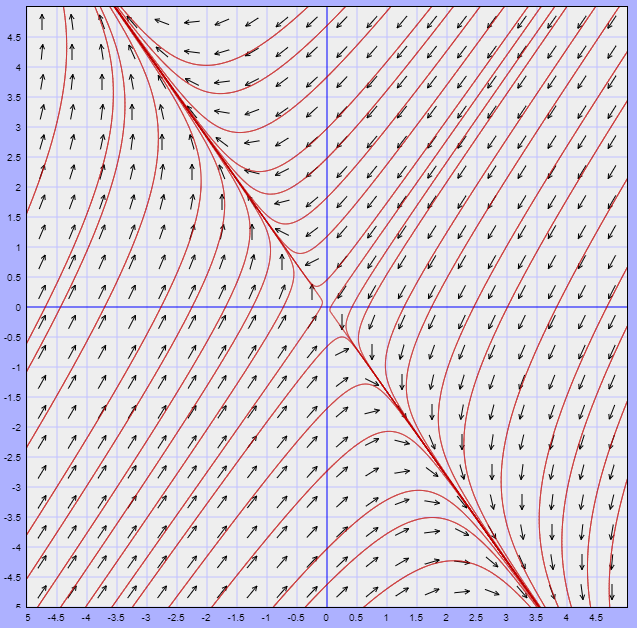
Durante las entradas anteriores revisamos una gran diversidad de ejemplos y vimos que existen sistemas que tienen curvas solución notables que vale la pena estudiar. Tales curvas son (casi siempre) periódicas, y las demás curvas solución del sistema tienden a esta de una manera asintótica. Un par de ejemplos son los siguientes:
Estudiar tales curvas es bastante complicado, y más aún, verificar que son órbitas cerradas. Afortunadamente el teorema de Poincaré – Bendixson nos ayudará a resolver este problema. El teorema es nombrado así debido al matemático francés Henri Poincaré, y al sueco Ivan Otto Bendixson. El primero de ellos fue el que sentó las bases para la teoría cualitativa de las ecuaciones diferenciales.
Demostrar el teorema no es algo sencillo, por lo que iremos enunciando poco a poco las herramientas necesarias para la demostración. Definiremos los conceptos de $\omega$-punto límite, $\alpha$-punto límite, $\omega$-conjunto límite, $\alpha$-conjunto límite, sección local en un punto, caja de flujo para una sección local, el mapeo de primer retorno de Poincaré y enunciaremos sus propiedades básicas, necesarias para la demostración del teorema.
Finalmente demostraremos el teorema de Poincaré – Bendixson en el plano, y comentaremos brevemente las consecuencias de este resultado, uno de los más importantes en la teoría de ecuaciones diferenciales.
Breve introducción al teorema de Poincaré – Bendixson en el plano. Conjuntos límite
Enunciamos brevemente el teorema de Poincaré – Bendixson en el plano. Posteriormente definimos los conceptos de $\omega$-punto límite, $\alpha$-punto límite, $\omega$-conjunto límite y $\alpha$-conjunto límite, revisamos algunos ejemplos y enunciamos las propiedades necesarias para la demostración del teorema.
Secciones locales
Definimos los conceptos de sección local en un punto $\textbf{X}_{0}$ del plano tal que no es punto de equilibrio del sistema $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$. Además definimos una caja de flujos para $\textbf{X}_{0}$ y analizamos el comportamiento de las soluciones al sistema en una vecindad de $\textbf{X}_{0}$.
Mapeo de Poincaré
Definimos el mapeo de primer retorno de Poincaré y lo relacionamos con la sección local de un punto $\textbf{X}_{0}$ que pertenece a una órbita cerrada $\gamma$ del sistema $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$ .
Teorema de Poincaré – Bendixson en el plano
Demostramos el teorema de Poincaré – Bendixson en el plano y enunciamos algunas consecuencias de este teorema.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Determina el $\omega$-conjunto límite de un punto $\textbf{X}_{0}$ perteneciente a una solución periódica.
Prueba que si $\gamma$ es una órbita cerrada para el sistema de ecuaciones $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$ y $S$ es una sección local en cualquier punto, entonces $\gamma$ intersecta a $S$ en a lo más un punto.
Los siguientes ejercicios muestran una estrategia para demostrar la existencia de soluciones periódicas no triviales a un sistema de ecuaciones.
Considera el sistema de ecuaciones $$\begin{array}{rcl} \dot{x} & = & y \\ \dot{y} & = & -x+y(1-2x^{2}-3y^{2}). \end{array}$$
Considera la función $L(x,y)=x^{2}+y^{2}$. Sea $(x(t),y(t))$ una solución no trivial al sistema. Prueba que $\dot{L}(x(t),y(t))>0$ en la región dada por $x^{2}+y^{2}<1/3$ y que $\dot{L}(x(t),y(t))<0$ en la región dada por $x^{2}+y^{2}>1/2$.
Sea $A=\{(x,y) \in \mathbb{R}^{2} | \frac{1}{3}<x^{2}+y^{2}<\frac{1}{2}\}$. Prueba que existe un $\omega$-conjunto límite contenido en $A$.
Prueba que no existen puntos de equilibrio contenidos en $A$.
Concluye que existe una órbita cerrada para el sistema.
Esboza el plano fase del sistema.
Más adelante
Esta es la última entrada del curso de Ecuaciones Diferenciales Ordinarias. Espero hayas disfrutado el curso tanto como nosotros al prepararlo. Por supuesto, existen muchos más temas referentes a las ecuaciones diferenciales que puedes buscar por tu cuenta, una vez que hemos mostrado el camino.
Además, puedes consultar más cursos contenidos en este blog que seguro serán de tu agrado.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada hablaremos acerca de un tipo de relaciones especiales a las que llamaremos relaciones de equivalencia. Veremos algunos ejemplos de relaciones que son de equivalencia, y algunos ejemplos de otras que no lo son.
Relaciones de equivalencia
Definición. Sea $R$ una relación en $A$. Decimos que $R$ es una relación de equivalencia si se satisfacen las siguientes condiciones:
Para cualquier $a\in A$, se tiene que $(a,a)\in R$ (reflexividad),
Para cualesquiera $a,b\in A$, se tiene que si $(a,b)\in R$, entonces $(b,a)\in R$ (simetría),
Para cualesquiera $a,b,c\in A$, se tiene que si $(a,b)\in R$ y $(b,c)\in R$, entonces $(a,c)\in R$ (transitividad).
Algunos ejemplos
Ejemplo.
Sea $A=\set{a,b}$. La relación $R=\set{(a,a), (b,b), (a,b), (b,a)}$ es relación de equivalencia. En efecto, podemos verificar que $R$ es una relación en $A$ y se verifican las propiedades. En este caso es sencillo demostrarlo. Las propiedades que piden la reflexividad, simetría y transitividad son que alguna pareja esté en $R$. Pero $R$ es todo el producto cartesiano $A\times A$, así que cualquier pareja estará.
$\square$
Ejemplo.
Sea $A=\set{1,2,3}$. La relación $R=\set{(1,1),(2,2),(3,3),(1,3),(3,1)}$ es relación de equivalencia. Veamos que cumple cada una de las propiedades.
Reflexividad. Los elementos de $A$ son $1,2,3$ y en efecto $(1,1),(2,2),(3,3)$ son elementos de $R$.
Simetría. Verifiquemos que se cumple para cada uno de los pares en $R$. – $(1,1)\in R$ y en efecto $(1,1)\in R$. – $(2,2)\in R$ y en efecto $(2,2)\in R$. – $(3,3)\in R$ y en efecto $(3,3)\in R$. – $(1,3)\in R$ y en efecto $(3,1)\in R$. – $(3,1)\in R$ y en efecto $(1,3)\in R$.
Transitividad. Aquí tenemos muchas posibilidades por verificar. Estrictamente hablando, hay que verificar todas las siguientes posibilidades. -$(1,1)\in R$ y $(1,1)\in R$ y, en efecto, $(1,1)\in R$. -$(1,1)\in R$ y $(1,3)\in R$ y, en efecto, $(1,3)\in R$. -$(2,2)\in R$ y $(2,2)\in R$ y, en efecto, $(2,2)\in R$. -$(3,3)\in R$ y $(3,3)\in R$ y, en efecto, $(3,3)\in R$. -$(3,3)\in R$ y $(3,1)\in R$ y, en efecto, $(3,1)\in R$. -$(1,3)\in R$ y $(3,3)\in R$ y, en efecto, $(3,3)\in R$. -$(1,3)\in R$ y $(3,1)\in R$ y, en efecto, $(1,1)\in R$. -$(3,1)\in R$ y $(1,1)\in R$ y, en efecto, $(3,1)\in R$. -$(3,1)\in R$ y $(1,3)\in R$ y, en efecto, $(3,3)\in R$.
Así, $R$ es relación de equivalencia en $X=\emptyset$.
$\square$
Ejemplo.
Sea $R=\emptyset$ la relación vacía pensada como una relación en $X=\emptyset$. Veamos que $R$ es relación de equivalencia. En efecto, podemos verificar las propiedades:
Reflexividad. No existe $x\in X$, así que por vacuidad para todo $x\in X$ se cumple que $(x,x)\in R$.
Simetría. Como la $R$ es la relación vacía, no hay $(x,y)\in R$. Así, por vacuidad $(x,y)\in \emptyset$ implica que $(y,x)\in R$.
Transitividad. También se cumple por vacuidad, pues no es posible encontrar $(x,y)\in R$ y $(y,z)\in R$.
Por lo tanto, $R$ es relación de equivalencia en $X=\emptyset$.
$\square$
En este último ejemplo fue muy importante que $X=\emptyset$. Una de las propiedades falla si no es el caso. ¿Cuál?
Relaciones casi de equivalencia
La definición de relación de equivalencia nos pide verificar tres propiedades: reflexividad, simetría y transitividad. Uno podría preguntarse si es necesario pedir las tres propiedades o si dos de ellas ya implican la tercera. Los siguientes ejemplos muestran que pedir cada cosa es necesario, pues para cualquier combinación de dos propiedades y la negación de la tercera, podemos encontrar un ejemplo.
Ejemplo. (Simétrica y transitiva pero no reflexiva).
Sea $X$ un conjunto no vacío. La relación vacía en $X$ no es relación de equivalencia. En efecto, podemos verificar que $\emptyset$ es simétrica y transitiva por un argumento por vacuidad (como hicimos arriba), pero $\emptyset$ no es una relación reflexiva, dado que al tomar $x\in X$ arbitrario,se tiene que $(x,x)\not \in \emptyset$.
$\square$
Ejemplo. (Reflexiva y simétrica pero no transitiva).
Sea $X=\set{a,b,c}$ y sea $R=\set{(a,a), (b,b), (c,c), (a,b), (b,a), (a,c), (c,a)}$. Tenemos que $R$ no es relación de equivalencia, pues aunque es reflexiva y simétrica no es transitiva. La razón por la cual no es transitiva es que $(c,a)\in R$ y $(a,b)\in R$, pero $(c,b)\notin R$.
$\square$
Ejemplo. (Reflexiva, transitiva pero no simétrica).
Sea $X=\set{a,b,c}$ y sea $R=\set{(a,a), (b,b), (c,c), (a,b)}$. Tenemos que $R$ no es relación de equivalencia, pues aunque es reflexiva y transitiva no es simétrica. Para ver esto último, notamos que $(a,b)\in R$, pero $(b,a)\not\in R$.
$\square$
Algunas propiedades de relaciones de equivalencia
Proposición. Sean $R_1$ y $R_2$ relaciones de equivalencia en $A$. Se tiene que $R_1\cap R_2$ es relación de equivalencia.
Demostración.
Supongamos que $R_1$ y $R_2$ son relaciones de equivalencia en $A$. Veamos que $R_1\cap R_2$ es una relación de equivalencia en $A$, para ello debemos verificar que $R_1\cap R_2$ es reflexiva, simétrica y transitiva.
Afirmación 1. $R_1\cap R_2$ es reflexiva.
Sea $a\in A$, veamos que $(a,a)\in R_1\cap R_2$. Como $a\in A$ y $R_1$ es relación de equivalencia en $A$, entonces en particular es reflexiva, de modo que $(a,a)\in R_1$.
Luego, como $a\in A$ y $R_2$ es reflexiva por ser relación de equivalencia se cumple que $(a,a)\in R_2$. Por lo tanto, $(a,a)\in R_1$ y $(a,a)\in R_2$, esto es $(a,a)\in R_1\cap R_2$.
Por lo tanto, $R_1\cap R_2$ es reflexiva.
Afirmación 2. $R_1\cap R_2$ es simétrica.
Sea $(a,b)\in R_1\cap R_2$, veamos que $(b,a)\in R_1\cap R_2$.
Como $(a,b)\in R_1\cap R_2$, entonces $(a,b)\in R_1$ y $(a,b)\in R_2$. Luego, $(b,a)\in R_1$ y $(b,a)\in R_2$ por ser $R_1$ y $R_2$ relaciones simétricas respectivamente. Por lo tanto, $(b,a)\in R_1\cap R_2$.
Por lo tanto, $R_1\cap R_2$ es simétrica.
Afirmación 3. $R_1\cap R_2$ es transitiva.
Sean $(a,b), (b,c)\in R_1\cap R_2$, veamos que $(a,c)\in R_1\cap R_2$.
Como $(a,b)\in R_1\cap R_2$, entonces $(a,b)\in R_1$ y $(a,b)\in R_2$. Luego, como $(b,c)\in R_1\cap R_2$ entonces $(b,c)\in R_1$ y $(b,c)\in R_2$.
Así, $(a,b)\in R_1$ y $(b,c)\in R_1$ y por la transitividad de $R_1$ se sigue que $(a,c)\in R_1$.
De forma similar, como $(a,b)\in R_2$ y $(b,c)\in R_2$ se sigue que $(a,c)\in R_2$ por transitividad de $R_2$.
De los argumentos anteriores se tiene que $(a,c)\in R_1\cap R_2$.
Por lo tanto, $R_1\cap R_2$ es transitiva.
De la Afirmación 1, Afirmación 2 y Afirmación 3 concluimos que $R_1\cap R_2$ es relación de equivalencia en $A$.
$\square$
Proposición. Si $R$ es una relación sobre un conjunto $X$ que cumple con las propiedades
$(x,x)\in R$ para todo $x\in X$ y
Si $(x,y)\in R$ y $(y,z)\in R$, entonces $(z,x)\in R$,
entonces $R$ es relación de equivalencia.
Demostración.
Supongamos que $R$ es una relación tal que $(x,x)\in R$ para todo $x\in X$ y si $(x,y)\in R$ y $(y,z)\in R$, entonces $(z,x)\in R$. Veamos que $R$ es relación de equivalencia.
Tenemos que $R$ es reflexiva pues por hipótesis $(x,x)\in R$ para todo $x\in X$. Luego, si $(x,y)\in R$, veamos que $(y,x)\in R$ para probar que $R$ es simétrica. Dado que $(x,y)\in R$ entonces $x,y\in X$ y por reflexividad $(y,y)\in R$. Así, por hipótesis tenemos que $(y,x)\in R$.
Ahora veamos que $R$ es transitiva. Supongamos que $(x,y)\in R$ y $(y,z)\in R$ y mostremos que $(x,z)\in R$. Como $(x,y)\in R$ y $(y,z)\in R$, entonces $(z,x)\in R$ y por simetría de $R$ se tiene que $(x,z)\in R$.
$\square$
Tarea moral
La siguiente lista de ejercicios te será útil para verificar por tu cuenta que ciertas relaciones son de equivalencia:
Demuestra que $Id_A$ es una relación de equivalencia para $A$ un conjunto cualquiera.
En el texto tomamos como ejemplo a $X=\set{a,b,c}$ y $R=\set{(a,a), (b,b), (c,c), (a,b), (b,a), (a,c), (c,a)}$ y mencionamos que $R$ era reflexiva y simétrica. Demuéstralo explícitamente.
También tomamos $X=\set{a,b,c}$ y $R=\set{(a,a), (b,b), (c,c), (a,b)}$ y mencionamos que era reflexiva y transitiva. Haz todos los casos para mostrar que esto es cierto.
Construye $R$ una relación tal que $R$ sea reflexiva pero no sea ni simétrica ni transitiva.
Demuestra o da un contraejemplo a las siguientes afirmaciones:
Si $R_1$ y $R_2$ son relaciones de equivalencia en $A$, entonces $R_1\cup R_2$ es relación de equivalencia en $A$.
Si $R_1$ es relación de equivalencia en $A$, $R_2$ es relación de equivalencia en $B$ y $A\cap B=\emptyset$, entonces $R_1\cup R_2$ es relación de equivalencia en $A\cup B$.
Un clásico argumento falso para demostrar que la reflexividad no es necesaria en la definición de relación de equivalencia es «argumentar» que si tenemos $(x,y)$ en la relación, por simetría tenemos $(y,x)$ y entonces por transitividad al tener $(x,y)$ y $(y,x)$ podemos deducir que tenemos $(x,x)$. ¿Cuál es el problema con este argumento?
Sea $X$ un conjunto y $R$ una relación simétrica y transitiva en $X$, tal que para todo $x\in X$ se tenga que exista un $y$ tal que $(x,y)\in R$. Demuestra que $R$ es relación de equivalencia.
Más adelante…
En la siguiente entrada seguiremos tratando a las relaciones de equivalencia. Esta vez hablaremos acerca de los elementos del conjunto en el cual hay una relación de equivalencia y cómo podemos estudiarlos según estén relacionados con otros elementos. Definiremos una nueva noción llamada clase de equivalencia. En una clase de equivalencia se encontrarán todos aquellos elementos que estén relacionados con un mismo elemento bajo la relación de equivalencia dada.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
Algún matemático dijo que el verdadero placer no reside en el descubrimiento de la verdad, sino en su búsqueda. – Tolstoy
Introducción
Hemos comenzado con el estudio cualitativo de los sistemas no lineales. Hasta este momento sólo somos capaces de predecir el comportamiento de las soluciones de un sistema no lineal alrededor de los puntos de equilibrio. Vimos que para hacerlo debemos encontrar el sistema lineal cuyas soluciones mejor se aproximen a las del sistema no lineal, a tal proceso se le conoce como linearización.
Nuestro propósito es esbozar de manera general el plano fase de un sistema no lineal, o al menos describir las trayectorias en zonas lejanas a los puntos de equilibrio.
En esta entrada veremos como hacer una descripción más general del plano fase a través de un método geométrico.
Nulclinas
Definición: Dado el sistema de ecuaciones diferenciales no lineales \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \label{1} \tag{1} \end{align*}Se define la nulclina $x$ como el conjunto de puntos $(x, y)$, tales que $F_{1}(x, y) = 0$. De forma similar, se define la nulclina $y$ como el conjunto de puntos $(x, y)$, tales que $F_{2}(x, y) = 0$
Una observación de la definición anterior es que las nulclinas corresponden a las curvas de nivel de las funciones $F_{1}$ y $F_{2}$
\begin{align*} F_{1}(x, y) &= c \\ F_{2}(x, y) &= c \label{2} \tag{2} \end{align*}
en el caso en el que $c = 0$.
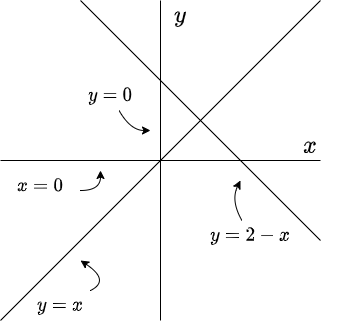
Ejemplo: Determinar las nulclinas del siguiente sistema no lineal.
Para obtener la nulclina $x$ (o nulclinas $x$) hacemos $F_{1}(x, y) = 0$, es decir
$$x(2 -x -y) = 0$$
de donde $x = 0$ o $2 -x -y = 0$. Una primer nulclina $x$ corresponde al eje $y$ del plano fase ya que $x = 0$. De la segunda expresión se obtiene la función $y(x) =2 -x$, la cual corresponde a una recta con pendiente negativa. Dicha recta es una segunda nulclina $x$.
Para obtener las nulclinas $y$ hacemos $F_{2}(x, y) = 0$, es decir,
$$y(y -x) = 0$$
de donde $y = 0$ o $y -x = 0$. En este caso una nulclina $y$ corresponde al eje $x$ del plano fase ya que $y = 0$, mientras que la segunda nulclina corresponde a la recta definida por la función $y(x) =x$.
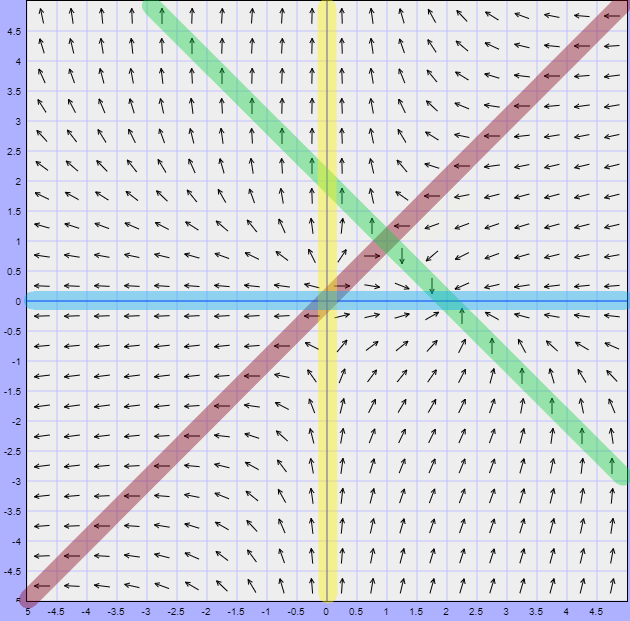
Por lo tanto, las rectas $x = 0$ (eje $y$), $y = 0$ (eje $x$), $y(x) =x$ y $y(x) =2 -x$ son las nulclinas del sistema no lineal. A continuación se muestran las nulclinas en el plano fase (o plano $XY$).
Nulclinas del sistema.
$\square$
¿Y de qué nos sirven las nulclinas?. Consideremos la función vectorial
De acuerdo a la definición de nulclinas notamos enseguida que, en general, el campo vectorial sobre una nulclina siempre será vertical (apuntará hacia arriba o hacia abajo) o será horizontal (apuntará hacia la izquierda o a la derecha) dependiendo de qué componente de la función vectorial (\ref{3}) sea cero.
Supongamos que los puntos $(x_{0}, y_{0})$ pertenecen a la nulclina $x$, entonces, por definición, se cumple
en este caso el campo vectorial en el punto $(x_{0}, y_{0})$ será vertical ya que no hay componente horizontal y apuntará hacia arriba si $F_{2}(x_{0}, y_{0}) > 0$ o hacia abajo si $F_{2}(x_{0}, y_{0}) < 0$.
De forma similar, si los puntos $(x_{0}, y_{0})$ pertenecen a la nulclina $y$, entonces se cumple
es decir, el campo vectorial será horizontal a lo largo de la nulclina $y$. Apuntará a la izquierda si $F_{1}(x_{0}, y_{0}) < 0$ o a la derecha si $F_{2}(x_{0}, y_{0}) > 0$.
Notemos otro hecho importante. Por definición, un punto de equilibrio satisface que
Eso significa que existe un punto $(x_{0}, y_{0})$ que esta tanto en la nulclina $x$ como en la nulclina $y$, en otras palabras, las intersecciones entre nulclinas corresponden a los puntos de equilibrio del sistema no lineal.
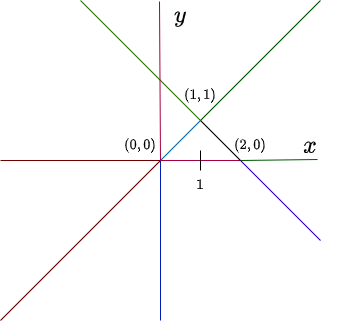
Ejemplo: Determinar los puntos de equilibrio así como la dirección del campo vectorial sobre las nulclinas del sistema no lineal del ejemplo anterior.
De la primer ecuación tenemos $x = 0$ o $2 -x -y = 0$, de la segunda relación se obtiene $y = 2 -x$. Por otro lado, de la segunda ecuación tenemos $y = 0$ o $y -x = 0$. Sustituyendo $x = 0$, entonces $y = 0$, por lo tanto, un punto de equilibrio es el origen $Y_{0} = (0, 0)$.
Si sustituimos $y = 2-x$ en $y -x = 0$ se tiene
$$(2 -x) -x = 2 -2x = 0$$
de donde $x = 1$, así $y = 2 -1 =1$, por tanto, otro punto de equilibrio es $Y_{1} = (1, 1)$.
Finalmente si $y = 0$, entonces $x = 2$, así el punto $Y_{2} = (2, 0)$ es otro punto de equilibrio.
Recordemos que las nulclinas del sistema están definidas por las rectas $x = 0$, $y = 0$, $y = x$ y $y = 2 -x$. Verifica que los puntos de equilibrio
efectivamente corresponden a los puntos de intersección entre las nulclinas del sistema.
¿Por qué el punto $(0, 2)$ no es un punto de equilibrio si es también la intersección de dos nulclinas?.
Ahora veamos que dirección tiene el campo vectorial sobre cada nulclina.
Lo primero que debemos notar es que cada nulclina está definida en intervalos.
Distintos intervalos para las nulclinas.
El eje $y$ (nulclina $x = 0$) se debe estudiar en los intervalos $y \in (-\infty, 0), (0, \infty)$.
El eje $x$ (nulclina $y = 0$) se debe estudiar en los intervalos $x \in (-\infty, 0), (0, 2), (2, \infty)$.
La nulclina definida por $y(x) = x$ se debe estudiar en los intervalos en los que $x \in (-\infty, 0), (0, 1), (1, \infty)$.
Finalmente, la nulclina definida por $y(x) = 2 -x$ se debe estudiar en los intervalos $x \in (-\infty, 1), (1, 2), (2, \infty)$.
Determinemos la dirección de los vectores en cada intervalo de cada nulclina apoyándonos de la función vectorial
$$F(x, y) = (x(2 -x -y), y(y -x))$$
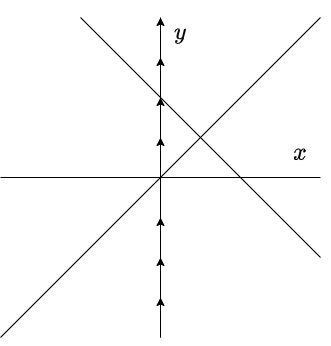
Comencemos por la nulclina $x$ definida por $x = 0$. Si $x = 0$, entonces
$$F(0, y) = (0, y^{2})$$
como $y^{2} > 0$ en todo momento, es decir para $y \in (-\infty, 0)$ y $y \in (0, \infty)$, entonces el campo vectorial sera vertical apuntando hacia arriba.
Dirección del campo vectorial sobre la nulclina definida por $x = 0$.
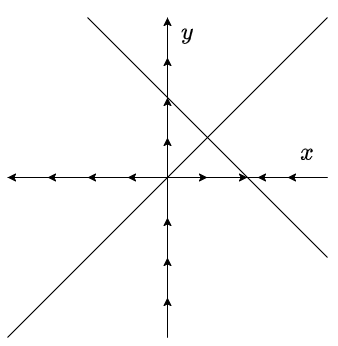
Para el caso de la nulclina $y$ definida por $y = 0$, se tiene
$$F(x, 0) = (2x -x^{2}, 0)$$
Comencemos con $x \in (-\infty, 0)$. Si $x < 0$, entonces $2x < 0$ y claro está que $-x^{2} < 0$, por tanto, en dicho intervalo $2x -x^{2} < 0$, esto significa que el campo vectorial será horizontal señalando hacia la izquierda.
Si $x \in (0, 2)$, entonces $x > 0$, o bien $2x > 0$ y $-x^{2} < 0$, es sencillo notar que dentro del intervalo que estamos considerando se cumple que $2x -x^{2} > 0$, por tanto, el campo apuntará a la derecha
Finamente, si $x \in (2, \infty)$, es claro que $2x -x^{2} < 0$, así que el campo volverá a apuntar hacia la izquierda.
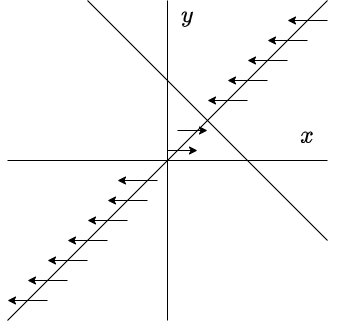
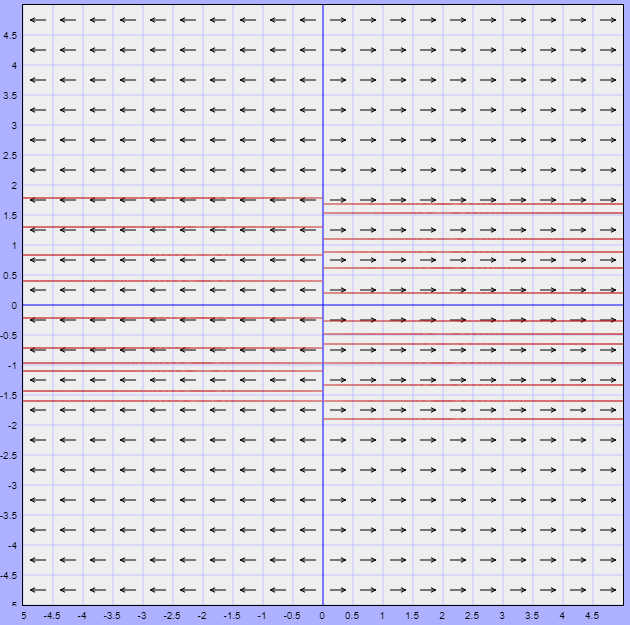
Campo vectorial sobre las nulclinas definidas por $y = 0$ y $x = 0$.
Consideremos ahora la nulclina $y$ definida por $y = x$, en este caso el campo vectorial esta dado por
$$F(y, y) = (2y -2y^{2}, 0)$$
o bien,
$$F(x, x) = (2x -2x^{2}, 0)$$
En el intervalo $x \in (-\infty, 0)$, se cumple que $x < 0$, $2x < 0$ y claro es que $-2x^{2} < 0$, así en dicho intervalo $2x -2x^{2} < 0$, por lo tanto, el campo vectorial es horizontal y apunta hacia la izquierda.
Si $x \in (0,1)$, entonces $2x -2x^{2} > 0$, el campo apuntará a la derecha y finalmente volverá a apuntar a la izquierda para $x \in (1, \infty )$, ya que $2x -2x^{2} < 0$.
Campo vectorial sobre la nulclina definida por $y(x) = x$.
Finalmente, para la nulclina $x$ definida por $y = 2 -x$, se tiene
$$F(x, 2 -x) = (0, 2x^{2} -6x + 4)$$
Es posible verificar que si $x \in (-\infty, 1)$, entonces
$$2x^{2} -6x + 4 > 0$$
Si $x \in (1, 2)$, entonces
$$2x^{2} -6x + 4 < 0$$
y si $x \in (2, \infty)$ se cumple que
$$2x^{2} -6 + 4 > 0$$
Por lo tanto, el campo vectorial apuntará hacia arriba, luego hacia abajo y después nuevamente hacia arriba, respectivamente.
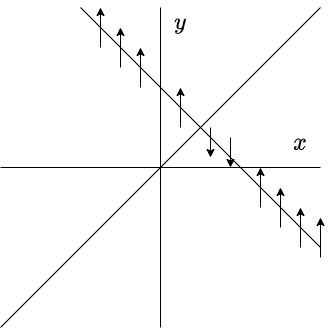
Campo vectorial sobre la nulclina definida por $y(x) = 2 -x$.
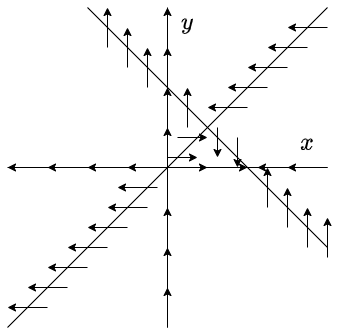
Por lo tanto, el campo vectorial sobre cada nulclina se ve de la siguiente forma.
Campo vectorial sobre las nulclinas del sistema.
$\square$
Recordemos que el campo vectorial es tangente a las trayectorias del sistema y la dirección indica la evolución de dichas trayectorias conforme $t \rightarrow \infty$, de manera que ahora tenemos una idea, aunque puede ser un poco vaga, de como se puede ir viendo el plano fase del sistema.
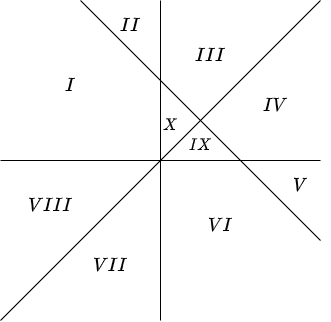
Una última observación que hacemos es que las curvas que representan a las nulclinas dividen al plano en varias regiones. En el ejemplo anterior se forman 10 regiones distintas las cuales se muestran en la siguiente figura.
Regiones limitadas por las nulclinas del sistema no lineal estudiado.
Esto nos permitirá esbozar el campo vectorial sobre cada región y con ello podremos trazar trayectorias obteniendo así una representación más general del plano fase de un sistema no lineal.
Ejemplo: Intentar esbozar el plano fase del sistema no lineal estudiado.
Solución: Hasta este momento conocemos los puntos de equilibrio del sistema, las nulclinas y la dirección del campo vectorial sobre cada una de ellas.
Lo que se puede hacer es determinar un vector aleatorio sobre cada una de las regiones limitadas por las nulclinas del sistema y en base a él aproximar una solución apoyándose también de los vectores ubicados sobre las nulclinas. En el segundo video de la sección de videos de este curso puedes encontrar el desarrollo de este método.
Debido a que a nosotros nos resulta más difícil dibujar algunas trayectorias, lo que haremos es utilizar nuestra herramienta de costumbre para visualizar el campo vectorial del sistema.
Campo vectorial del sistema no lineal indicando las nulclinas.
En esta figura visualizamos el campo vectorial del sistema, así como sobre las nulclinas.
Lo primero que se puede hacer es linealizar el sistema con respecto a cada uno de los puntos de equilibrio. Recordemos que la función vectorial $F$ es
Por lo tanto, los sistemas lineales que se aproximan a la descripción de las trayectorias del sistema no lineal alrededor de los puntos de equilibrio son:
Plano fase del sistema linealizado en el punto de equilibrio $Y_{2} = (2, 0)$.
Con el conocimiento de la forma de las trayectorias alrededor de los puntos de equilibrio y con la dirección del campo vectorial sobre algunos puntos del plano fase, entre ellos sobre las nulclinas, es que podemos esbozar completamente el plano fase del sistema no lineal.
En este caso, el plano fase correspondiente al sistema no lineal estudiado es
Plano fase y campo vectorial del sistema.
El flujo de las trayectorias es algo que ya intuíamos al considerar toda la información que estuvimos desarrollando sobre el sistema a lo largo de la entrada.
$\square$
Con esto concluimos el estudio cualitativo de algunos sistemas no lineales sencillos.
En la siguiente entrada estudiaremos un comportamiento interesante que presentan las trayectorias de algunos sistemas no lineales y cuya descripción se establece en el conocido teorema de Poincaré – Bendixon.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Hacer un bosquejo del plano fase de los siguientes sistemas no lineales siguiendo el método desarrollado a lo largo de la unidad. (Recuerda que el propósito es esbozar el plano fase a mano, una vez que concluyas puede comparar tu resultado con el obtenido usando una computadora.)
¿Qué se observa de este sistema no lineal?. ¿Hay alguna dificultad en esbozar el plano fase?.
Más adelante…
Ahora somos capaces de hacer un estudio cualitativo de algunos sistemas no lineales, sin embargo existen situaciones en las que un sistema no lineal presenta un comportamiento interesante en el que las trayectorias tienden a una curva cerrada conocida como ciclo límite. En la siguiente y última entrada del curso estudiaremos la descripción de estos sistemas y enunciaremos el teorema de Poincaré – Bendixson en el plano.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Al final de la primera unidad del curso, estudiamos bifurcaciones en familias uniparamétricas de ecuaciones autónomas de primer orden de la forma $$\frac{dy}{dt}=f_{\lambda}(y).$$ Los conceptos más elementales de dicha teoría los podemos extender a sistemas de ecuaciones de primer orden. Así podremos estudiar familias de sistemas de ecuaciones de la forma $$\dot{\textbf{X}}=\textbf{F}(\lambda, \textbf{X})$$ donde $\lambda$ es un parámetro real. Al igual que para ecuaciones autónomas de primer orden, nuestro interés se centrará en estudiar los cambios cualitativos en los puntos de equilibrio y demás soluciones al sistema conforme varía el parámetro $\lambda$. Es decir, estudiaremos las bifurcaciones en familias de sistemas de ecuaciones de primer orden.
Comenzaremos por definir los conceptos más elementales en la teoría de bifurcaciones en términos de sistemas de dos ecuaciones de primer orden. Posteriormente nos enfocaremos en estudiar algunos casos interesantes que ocurren en familias de sistemas de ecuaciones lineales. En los sistemas lineales podemos introducir el parámetro en los coeficientes de la matriz asociada al sistema. Con ayuda del plano traza – determinante, podremos analizar de mejor manera las bifurcaciones que ocurren para cada caso. En cualquier caso el número de puntos de equilibrio no cambia, ya que al ser sistemas lineales homogéneos, el origen siempre será el único punto de equilibrio, pero conforme varían los parámetros lo que cambiará es su estabilidad.
Para el caso no lineal ofreceremos dos ejemplos típicos de bifurcaciones: la bifurcación de punto silla y la bifurcación de Hopf. Para el primer ejemplo, la bifurcación provoca un cambio en el número de puntos de equilibrio, y por supuesto en la estabilidad de estos. En la bifurcación de Hopf, siempre habrá un único punto de equilibrio, pero lo que cambiará será su estabilidad, y además aparecerá una solución periódica que atrae a todas las demás soluciones.
¡Vamos a comenzar!
Bifurcaciones en sistemas de ecuaciones lineales
En el primer video definimos los conceptos elementales en la teoría de bifurcaciones, tales como familias de ecuaciones de primer orden que dependen de un parámetro y el valor de bifurcación.
En el segundo video estudiamos algunas bifurcaciones en sistemas de dos ecuaciones lineales.
Bifurcaciones en sistemas de ecuaciones no lineales
En el último video de esta entrada estudiamos un par de bifurcaciones que ocurren en sistemas no lineales: la bifurcación de punto silla y la bifurcación de Hopf.
Los campos vectoriales que aparecen en los videos fueron realizados en el siguiente enlace.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Estudia la familia de sistemas de la forma $$\dot{\textbf{X}}=\begin{pmatrix} a & 0 \\ 0 & \lambda \end{pmatrix}$$ donde $a<0$ es un valor fijo y $\lambda$ es un parámetro real. Representa los cambios que ocurren en el plano traza – determinante, según los valores de $\lambda$.
Realiza lo mismo que el ejercicio anterior para la familia de sistemas que depende del parámetro $\lambda$ $$\dot{\textbf{X}}=\begin{pmatrix} 1 & 1 \\ \lambda & 1 \end{pmatrix}.$$
Considera la familia de sistemas $$\begin{array}{rcl} \dot{x} & = & x^{2}+y \\ \dot{y} & = & x-y+\lambda. \end{array}$$ Encuentra todas las posibles bifurcaciones y estudia los cambios en el comportamiento de las soluciones.
Demuestra que bajo un cambio a coordenadas polares, un sistema de dos ecuaciones puede escribirse en la forma $$\begin{array}{rcl} \dot{r} & = & \frac{x\dot{x}+y\dot{y}}{r} \\ \dot{\theta} & = & \frac{x\dot{y}-\dot{x}y}{r^{2}}. \end{array}$$
(Bifurcación de Pitchfork): Realiza un estudio completo de la familia de sistemas $$\begin{array}{rcl} \dot{x} & = & -x^{3}-\lambda x \\ \dot{y} & = & -y. \end{array}$$
Más adelante
Estamos a punto de concluir nuestro curso de Ecuaciones Diferenciales. En la siguiente entrada estudiaremos los conjuntos límite, los cuáles han estado apareciendo en distintos planos fase que hemos dibujado. Además, enunciaremos y discutiremos el teorema de Poincaré – Bendixson en el plano.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
La educación en matemáticas es mucho más complicada que lo que esperabas, incluso si esperabas que es más complicada que lo que esperabas. – Edward Griffith Begle
Introducción
Nos acercamos al final de este curso. Para concluir estudiaremos un último tema que tiene que ver con los sistemas autónomos de ecuaciones diferenciales no lineales.
Resolver de forma analítica sistemas de ecuaciones diferenciales no lineales puede ser una tarea sumamente complicada y en algunos casos hasta imposible, es por ello que en muchas ocasiones se opta por resolverlos con métodos numéricos. En este curso no veremos métodos numéricos y mucho menos métodos analíticos para resolver sistemas de ecuaciones diferenciales no lineales debido a que requerimos de más teoría que queda fuera de este primer curso de ecuaciones diferenciales. Pero lo que si podemos hacer es un análisis cualitativo como lo hemos estado haciendo en esta unidad.
Recordemos que el espacio fase de un sistema de ecuaciones diferenciales aporta la suficiente información como para conocer de forma completa el comportamiento de los soluciones a diferentes tiempos, incluso esta información puede ser suficiente para describir el fenómeno que estemos estudiando sin la necesidad de conocer explícitamente las soluciones del sistema.
En esta y las próximas entradas comenzaremos a desarrollar métodos cualitativos que nos permitirán construir el espacio fase de sistemas no lineales y por tanto conocer el comportamiento de sus soluciones a diferentes tiempos y diferentes condiciones iniciales.
En estos momentos ya conocemos métodos analíticos y geométricos que nos permiten entender completamente a los sistemas lineales, es posible combinar estos métodos con algunas otras técnicas cualitativas adicionales para describir a los sistemas no lineales. Comenzaremos desarrollando el método de linealización, el cual nos mostrará cómo es que puede aproximarse un sistema no lineal a un punto de equilibrio por medio de un sistema lineal.
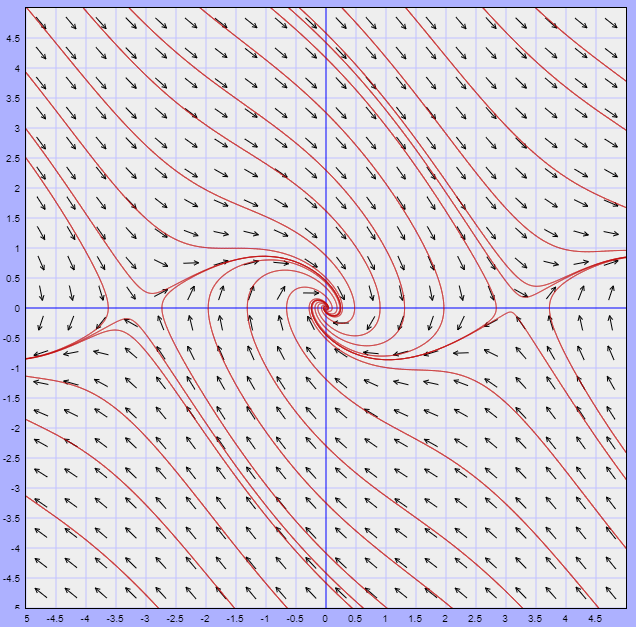
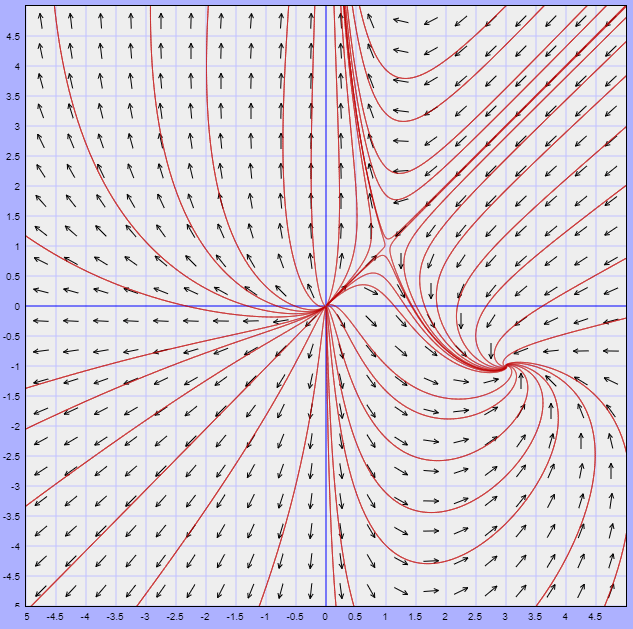
Enseguida podemos darnos cuenta de que el único punto de equilibrio del sistema es el origen. Usando la herramienta que hemos estado utilizando a lo largo de esta unidad podemos visualizar el plano fase del sistema acompañado del campo vectorial asociado.
Plano fase del sistema no lineal (1).
Las trayectorias en general no muestran un comportamiento parecido a alguno de los sistemas estudiados en las entradas anteriores y claro que debe ser así, ya que en este caso se trata de un sistema no lineal. Sin embargo, se puede notar que alrededor del punto de equilibrio, es decir del origen, si hay un comportamiento que nos parece familiar, pues se trata de una espiral que se aleja del origen (parecido a foco inestable).
Lo que haremos será aproximar el sistema (\ref{1}) con un sistema que sea mucho más fácil de analizar. Observemos que el término que hace que el sistema no sea lineal es $x^{2}y$ en la ecuación para $y^{\prime}$. Si $x$ y $y$ son pequeñas (cercanas al punto de equilibrio), entonces el término $x^{2}y$ es aún mucho más pequeño, de manera que para valores pequeños de $x$ y de $y$ es posible aproximar el sistema (\ref{1}) en un sistema lineal en el que no aparece el término $x^{2}y$, dicho sistema es
\begin{align*} x^{\prime} &= y \\ y^{\prime} &= -x + y \label{2} \tag{2} \end{align*}
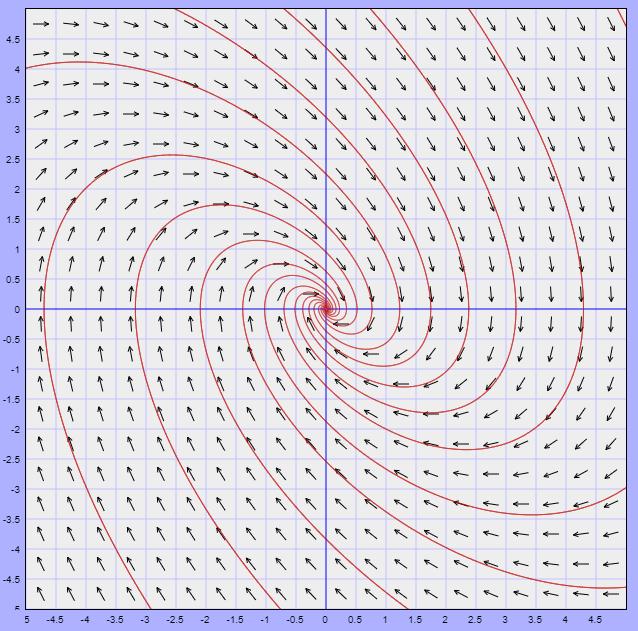
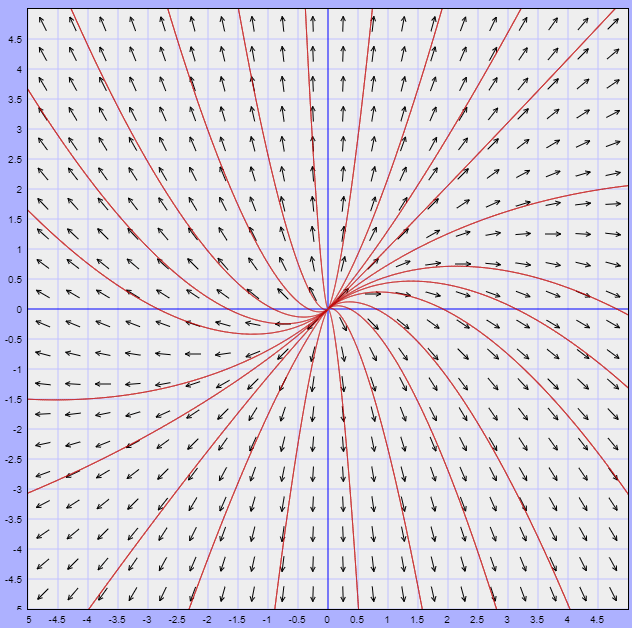
Ambos sistemas deben ser muy similares en una vecindad muy próxima al punto de equilibrio, en este caso en el origen. Veamos el plano fase del sistema lineal (\ref{2}).
Plano fase del sistema lineal (2).
Si observamos con cuidado ambos planos fase vemos que efectivamente son muy similares alrededor del origen, ya que ambos corresponden a espirales que se alejan del origen.
El plano fase del sistema (\ref{2}) corresponde a un sistema con valores propios complejos. Prueba que efectivamente los valores propios son
$$\lambda_{1} = \dfrac{1 + i \sqrt{3}}{2} \hspace{1cm} y \hspace{1cm} \lambda_{2} = \dfrac{1 -i \sqrt{3}}{2}$$
Como son complejos con parte real positiva, sabemos que las soluciones del sistema lineal se mueven en espiral alejándose del origen.
Lo que hemos hecho se conoce como linealización del punto de equilibrio. Cerca del punto de equilibrio aproximamos el sistema no lineal por medio de un sistema lineal apropiado. Para condiciones iniciales cerca del punto de equilibrio las soluciones del sistema no lineal y de la aproximación lineal permanecen cercanas entre sí, por lo menos en algún intervalo.
El sistema no lineal (\ref{1}) se conoce como ecuación de Van der Pol y más adelante volveremos a él.
Veamos cómo sería hacer una linealización de un sistema no polinomial. Consideremos el sistema no lineal
$$\lambda_{1} = \dfrac{-1 + i \sqrt{3}}{2} \hspace{1cm} y \hspace{1cm} \lambda_{2} = \dfrac{-1 -i \sqrt{3}}{2}$$
Como estos números son complejos con parte real negativa, esperamos que el correspondiente punto de equilibrio para el sistema no lineal sea un foco estable.
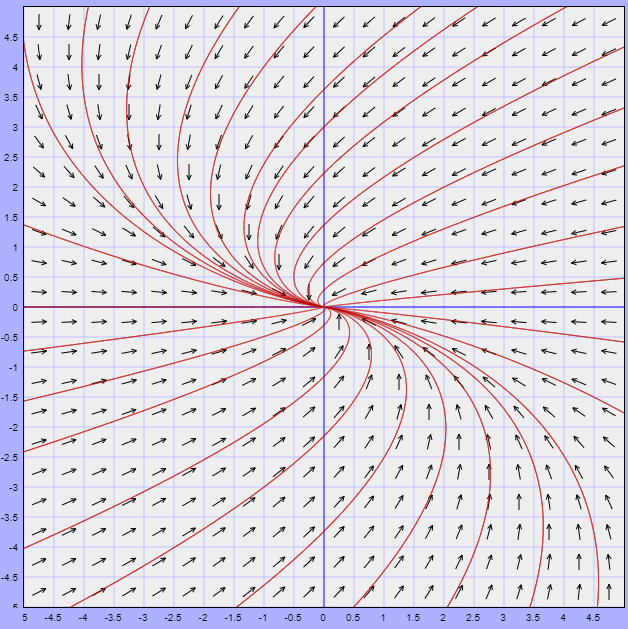
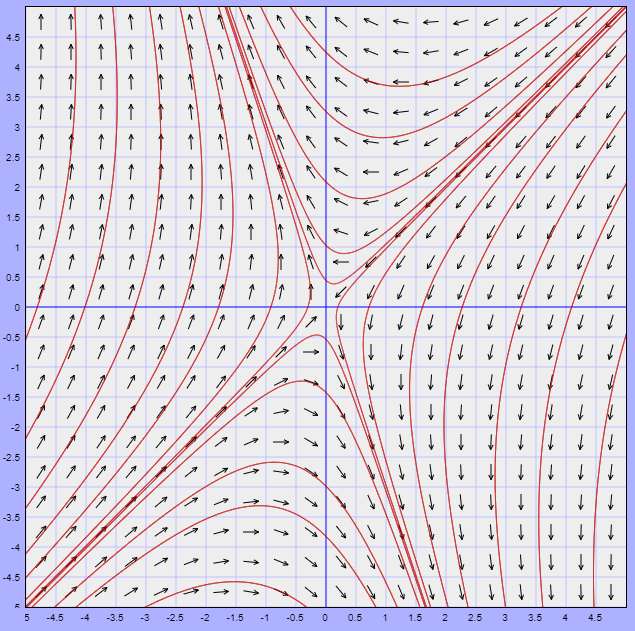
A continuación se muestra el plano fase del sistema no lineal (\ref{3}) y posteriormente el plano fase del sistema linealizado (\ref{6}) y observemos en ambos el comportamiento de las trayectorias alrededor del punto de equilibrio $Y_{0} = (0, 0)$.
Plano fase del sistema (3).Plano fase del sistema (6).
Efectivamente, en ambos planos fase alrededor del origen presentan el mismo comportamiento correspondiente a un foco estable.
El proceso de linealización puede ser directo independientemente del sistema no lineal que tengamos, pero debemos apoyarnos de una herramienta del cálculo diferencial conocida como matriz Jacobiana.
Linealización de los puntos de equilibrio
Consideremos el siguiente sistema autónomo no lineal.
Supongamos que $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio de este sistema (no necesariamente el origen). Queremos entender qué sucede con las soluciones cerca de $Y_{0}$, es decir, linealizar el sistema cerca de $Y_{0}$. Introducimos nuevas variables.
\begin{align*} u &= x -x_{0} \\ v &= y -y_{0} \label{8} \tag{8} \end{align*}
Lo que hacen estas variables es mover el punto de equilibrio al origen. Si $x$ y $y$ están cerca del punto de equilibrio $(x_{0}, y_{0})$, entonces $u$ y $v$ tienden a $0$.
Como los números $x_{0}$ y $y_{0}$ son constantes y además
$$x = u + x_{0} \hspace{1cm} y \hspace{1cm} y = v + y_{0}$$
entonces el sistema (\ref{7}) escrito en términos de $u$ y $v$ es
ya que $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio, esto nos muestra que hemos movido el punto de equilibrio al origen en el plano $UV$.
Lo que haremos a continuación es apoyarnos de algunos resultados del curso de Cálculo III. Necesitamos eliminar los términos de orden superior o no lineales del sistema (\ref{9}). Como esas expresiones pueden incluir funciones exponenciales, logarítmicas y trigonométricas, no siempre es claro cuáles son los términos lineales. En este caso es necesario estudiar a $F_{1}$ y $F_{2}$ con más atención.
De cálculo sabemos que es posible estudiar una función analizando su mejor aproximación lineal, la cual está dada por el plano tangente para funciones de dos variables, es decir
El lado derecho es la ecuación para el plano tangente a la gráfica de $F_{1}$ en $Y_{0} = (x_{0}, y_{0})$. Recordemos que la expresión (\ref{10}) es también la aproximación polinomial de primer grado de Taylor para $F_{1}$.
Podemos, entonces, reescribir el sistema (\ref{9}) como
Donde $\vartheta_{F_{1}}$ y $\vartheta_{F_{2}}$ son los términos que forman la diferencia entre el plano tangente y las funciones $F_{1}$ y $F_{2}$, respectivamente, y son precisamente los términos que deseamos ignorar al formar la aproximación lineal del sistema.
Como $Y_{0} = (x_{0}, y_{0})$ es un punto de equilibrio, entonces
Por lo tanto, el sistema linealizado en el punto de equilibrio $Y_{0} = (x_{0},y_{0})$ es
$$\begin{pmatrix} u^{\prime} \\ v^{\prime} \end{pmatrix} = \mathbf{J} \begin{pmatrix} u \\ v \end{pmatrix} \label{15} \tag{15}$$
Una observación importante de este proceso es que para crear el sistema linealizado sólo es necesario conocer las derivadas parciales de las componentes $F_{1}$ y $F_{2}$ del campo vectorial en el punto de equilibrio $Y_{0}$, no es necesario hacer el cambio de variable moviendo el punto de equilibrio al origen. Más adelante veremos ejemplos para mostrar este hecho.
Clasificación de los puntos de equilibrio
El método de linealización tiene como propósito usar un sistema lineal para predecir el comportamiento de las soluciones de un sistema no lineal cerca de un punto de equilibrio. En una vecindad de dicho punto, las soluciones de los sistemas lineales y no lineales están cercanas entre sí, por lo menos en un intervalo corto. Para la mayor parte de los sistemas, la información ganada al estudiar la linearización es suficiente para determinar el comportamiento a largo plazo de las soluciones del sistema no lineal cerca del punto de equilibrio.
Esta vez no seremos explícitos, pero es posible hacer una clasificación de los puntos de equilibrio en base a los valores propios de la matriz Jacobiana (\ref{14}).
Si todos los valores propios de $\mathbf{J}$ son números reales negativos o números complejos con parte real negativa, entonces $(u, v) = (0, 0)$ es un nodo atractor para el sistema lineal y todas las soluciones se acercan a $(u, v) = (0, 0)$ cuando $t \rightarrow \infty$. Para el sistema no lineal, las soluciones que empiezan cerca del punto de equilibrio $(x, y) = (x_{0}, y_{0})$ se acercan a éste cuando $t \rightarrow \infty$. Por tanto, decimos que $(x_{0}, y_{0})$ es un nodo atractor. Si los valores propios son complejos, entonces $(x_{0}, y_{0})$ es un foco estable.
De modo similar, si $\mathbf{J}$ sólo tiene valores propios positivos o complejos con parte real positiva, entonces las soluciones con condiciones iniciales cerca del punto de equilibrio $(x_{0}, y_{0})$ tienden a alejarse de éste cuando $t$ crece. Decimos entonces que para un sistema no lineal el punto $(x_{0}, y_{0})$ es una nodo repulsor. Si los valores propios son complejos, entonces $(x_{0}, y_{0})$ es un foco inestable.
Si $\mathbf{J}$ tiene un valor propio positivo y uno negativo, entonces el punto de equilibrio $(x_{0}, y_{0})$ es un punto silla.
Es importante mencionar que esta clasificación de los puntos de equilibrio para los sistemas no lineales no nos dice nada acerca del comportamiento de las soluciones con posiciones iniciales lejanas del punto de equilibrio $(x_{0}, y_{0})$.
Para concluir con esta entrada realicemos algunos ejemplos.
Ejemplo: Linealizar el siguiente sistema no lineal.
Solución: Comencemos por observar el plano fase de este sistema no lineal.
Plano fase del sistema no lineal.
Nota: Cuando estudiamos las propiedades cualitativas de las trayectorias vimos que es posible esbozar el plano fase de un sistema no lineal si resolvemos la ecuación diferencial
pero no siempre obtendremos una ecuación sencilla de resolver. En general, aún no sabemos cómo esbozar el plano fase de un sistema no lineal, lo ideal es que nosotros lo pudiéramos hacer a mano. Por ahora sólo nos estaremos apoyando de un programa que nos permite obtenerlo, más adelante veremos cómo esbozarlo no sólo cerca de los puntos de equilibrio.
Continuemos con el ejemplo. Del plano fase podemos observar que los puntos de equilibrio son
No es necesario hacer algún tipo de cambio de variable, directamente podemos determinar la matriz Jacobiana para obtener una expresión similar a (\ref{15}). Calculemos las derivadas parciales de $F_{1}(x, y)$ y $F_{2}(x, y)$.
De la primer ecuación obtenemos que $x = 0$ y $2 -x -y = 0$, de este segundo resultado vemos que $x = 2 -y$, sustituyamos ambos valores en la segunda ecuación.
Para $x =0$ obtenemos $3y =0$, de donde $y =0$. Por lo tanto, el origen es un punto de equilibrio.
Para $x =2 -y$, tenemos
$$-(2 -y) + 3y -2(2 -y)y =y^{2} -1 = 0$$
De donde $y_{1} = 1$ y $y_{2} = -1$, sustituyendo ambas raíces en $x = 2 -y$, se tiene
Plano fase del sistema linealizado en el punto de equilibrio $Y_{0} = (3, -1)$.
Por su puesto que se puede aplicar todo lo que sabemos sobre sistemas lineales, podemos determinar los valores propios y los vectores propios para obtener las soluciones generales, podemos también determinar la traza, el determinante, el discriminante y determinar la estabilidad de los puntos de equilibrio, etcétera.
Lo que estamos obteniendo es una descripción local del comportamiento de las soluciones del sistema no lineal alrededor de los puntos de equilibrio.
Una aclaración importante es que los planos fase de los sistemas lineales obtenidos están siendo graficados en el plano $UV$, es por ello que cada uno se encuentra centrado en el origen, en el origen de dicho plano.
$\square$
Finalicemos esta entrada con un ejemplo de especies en competencia.
Un modelo de especies en competencia
El sistema Volterra – Lotka es un conocido sistema para especies en competencia y es de la forma
donde $x$ y $y$ son mayores o igual a cero y los parámetros $A -F$ son siempre positivos.
Consideremos un ejemplo particular del sistema Volterra – Lotka. Sean $x$ y $y$ las poblaciones de dos especies que compiten por recursos, un incremento en cualquier especie tiene un efecto adverso sobre la razón de crecimiento de la otra. El modelo es el siguiente.
Para un valor dado de $x$, si $y$ se incrementa entonces el término $-xy$ ocasiona que $x^{\prime}$ decrezca. De forma similar, para un valor dado de $y$, si $x$ crece entonces $-2xy$ provoca que $y^{\prime}$ disminuya. Un aumento en la población de cualquiera de las especies ocasiona una disminución en la razón de crecimiento de la otra.
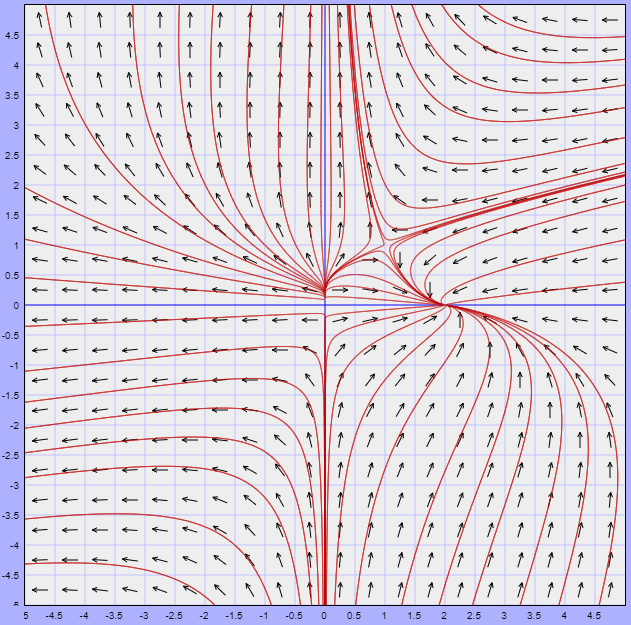
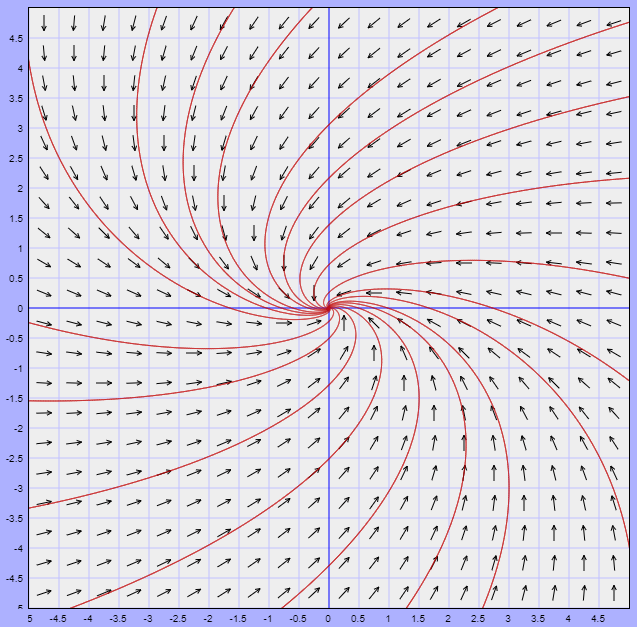
El plano fase del sistema no lineal es
Plano fase del sistema de especies en competencia.
Nota: El plano fase se ilustra para $x$ y $y$ en $\mathbb{R}$, sin embargo, recordemos que el sistema Volterra – Lotka sólo esta definido en el primer cuadrante en el que $x, y \geq 0$, esto debido a que no existen poblaciones negativas. Se puede observar que los cuatro puntos de equilibrio del sistema si pertenecen al primer cuadrante. Sólo consideraremos esta zona.
Consideremos el punto de equilibrio $Y_{3} = (1,1)$, el cual nos indica que es posible para las dos especies coexistir en equilibrio (como las flores y las abejas que se ayudan a sobrevivir y prosperar mutuamente).
Linealizamos el sistema alrededor del punto de equilibrio $Y_{3} = (1, 1)$, para ello evaluemos en la matriz Jacobiana.
como uno es positivo y otro negativo concluimos que el punto de equilibrio es un punto silla. El plano fase del sistema lineal es
Plano fase linealizado alrededor del punto de equilibrio $Y_{3} = (1, 1)$.
Sólo hay dos trayectorias que tienden hacia el punto de equilibrio $Y_{3} = (1, 1)$ cuando $t$ crece, de modo que bajo cualquier perturbación en las condiciones iniciales provocará que una especie domine sobre la otra, sin embargo, este modelo de especies es muy simplificado que no esperamos ver soluciones que conduzcan al punto de equilibrio $(1, 1)$ en la naturaleza.
De tarea moral linealiza el sistema para el resto de puntos de equilibrio.
$\square$
Ahora sabemos como estudiar las soluciones de un sistema no lineal alrededor de sus puntos de equilibrio, esto sólo nos dará información local, de manera que no es suficiente si lo que queremos es describir las soluciones para tiempos grandes. En la siguiente entrada veremos una técnica que nos permite describir las soluciones lejos de los puntos de equilibrio.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Considerar los siguientes tres sistemas no lineales:
$x^{\prime} = 2x + y$ $y^{\prime} = -y + x^{2}$
$x^{\prime} = 2x + y$ $y^{\prime} = y + x^{2}$
$x^{\prime} = 2x + y$ $y^{\prime} = -y -x^{2}$
Los tres sistemas tienen un punto de equilibrio en $(0,0)$. ¿Cuáles dos sistemas tienen planos fase similares cerca de $(0,0)$?. Justificar la respuesta.
Considerar los siguientes tres sistemas no lineales:
Los tres sistemas tienen un punto de equilibrio en $(0,0)$. ¿Cuáles son los dos sistemas que tienen planos fase similares cerca de $(0,0)$?. Justificar la respuesta.
Dado el siguiente sistema no lineal:
$x^{\prime} = -2x + y$ $y^{\prime} = -y + x^{2}$
Encontrar el sistema linealizado para el punto de equilibrio $(0, 0)$.
Clasificar el punto de equilibrio.
Esbozar el plano fase para el sistema no lineal cerca del origen $(0, 0)$.
Repetir los puntos anteriores para el punto de equilibrio $(2, 4)$.
Para el modelo de población de especies en competencia
Linealizar el sistema con respecto al punto de equilibrio $(0, 0)$.
Visualizar el plano fase del sistema linealizado.
¿Los planos fase de ambos sistemas alrededor del punto de equilibrio $(0, 0)$ son similares?. ¿Qué puede estar sucediendo?.
Más adelante…
Una propiedad interesante del campo vectorial
$$F(x, y) = (F_{1}(x, y), F_{2}(x, y))$$
es que en un punto el vector $F$ puede ser totalmente vertical si la componente $F_{1}$ es cero, o bien puede ser totalmente horizontal se la componente $F_{2}$ es cero. Esta propiedad resultará sumamente útil a la hora de estudiar las trayectorias de un sistema no lineal lejos de un punto de equilibrio.
Al conjunto de puntos en los que alguna de las componentes de la función vectorial $F$ es cero se les denomina nulclinas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»