Antes de entrar de lleno a lo que será una parte importante en tu carrera en las matemáticas, vamos a establecer algunas definiciones que nos permiten aterrizar un poco la idea de usar una serie de proposiciones para ‘demostrar’ otras cosas. En esta entrada veremos algo llamado inferencias matemáticas.
La implicación para deducir verdades
Pensemos un momento en las siguientes dos expresiones:
$$P \qquad P\Rightarrow Q,.$$
¿Qué sucedería si acordamos o sabemos por cualquier razón, que $P$ es verdadera y que $P\Rightarrow Q$ es verdadera? Entonces, debe pasar forzosamente que $Q$ debe ser verdadera. En efecto, esto podemos verificarlo en una tabla de verdad:
$P$
$Q$
$P\Rightarrow Q$
$0$
$0$
$1$
$0$
$1$
$1$
$1$
$0$
$0$
$1$
$1$
$1$
El único renglón en donde $P$ es $1$ y $P\Rightarrow Q$ es $1$ es el cuarto renglón, en el cual en efecto $Q$ es $1$. De la veracidad de $P$ y $P\Rightarrow Q$ se obtiene la veracidad de $Q$. Esto es muy importante, pues nos dice que de $P$ y de $P\Rightarrow Q$ se puede deducir $Q$.
Pensemos ahora en la siguiente fórmula proposicional:
$$(P \land (P \Rightarrow Q)) \Rightarrow Q $$
Por lo que entendemos del $\Rightarrow$ de la derecha, estamos diciendo algo similar a lo que pusimos arriba: «$P$ y $P\Rightarrow Q$ implican $Q$». Abajo haremos una conexión más explícita.
Por el momento, puedes tomar el siguiente ejemplo. Imagina que sabes que las siguientes dos cosas son ciertas simultáneamente:
Si $n$ es un entero impar, entonces $n+1$ es un entero par.
$n$ es un entero impar.
¿Qué podrías concluir a partir de la veracidad de estas dos oraciones? Que $n+1$ es un entero par. Más concretamente, imagina por un momento que no sabes si 8 es impar o par, pero que sí sabemos la veracidad de la primera oración de arriba y que $7$ es impar. Esta información es suficiente para saber que 8 es par, ¿No lo crees?
Inferencias matemáticas: premisas y conclusiones
Lo que hicimos en el ejemplo de la sección anterior fue tomar dos proposiciones $P\Rightarrow Q$ y $Q$ y que acordamos/sabemos que simultánteamente eran verdaderas. A partir de las veracidades de ellas, logramos concluir la veracidad de otra proposición $P$. Nuestro argumento de que «la veracidad de las premisas hizo que la conclusión fuera verdadera» fue a través de la tabla de verdad. Decimos que usamos una inferencia matemática o una regla de inferencia.
Más formalmente, una regla de inferencia está conformada por unas premisas $P_1, P_2,\ldots, P_n$, que son usualmente fórmulas proposicionales en ciertas variables proposicionales que estamos usando; y una conclusión $Q$ que también es una fórmula proposicional. La regla de inferencia es entonces la fórmula proposicional
Hasta aquí hemos definido qué es una regla de inferencia. Pero hay reglas de inferencia válidas y otras que no lo son. Es decir, hay algunas inferencias matemáticas que son válidas: a partir de la veracidad de las premisas se puede obtener la veracidad de la conclusión (como en el ejemplo que discutimos en la sección anterior). Y hay otras que no, que son inválidas. Es decir, son inferencias matemáticas en las que aunque las premisas sean verdaderas, no podemos concluir nada de la veracidad de la conclusión. ¿Cómo saber cuáles reglas de inferencia son válidas y cuáles no?
Volvamos de nuevo a nuestro ejemplo. Las premisas en este caso son $P$ y $P \Rightarrow Q$ y la conclusión es $Q$. Ahora veamos la tabla de verdad de la regla de inferencia $(P \land (P \Rightarrow Q)) \Rightarrow Q $:
$P$
$Q$
$P \Rightarrow Q$
$P \land (P \Rightarrow Q)$
$(P \land (P \Rightarrow Q)) \Rightarrow Q $
$0$
$0$
0
0
1
$0$
$1$
0
0
1
$1$
$0$
1
0
1
$1$
$1$
1
1
1
¿Notas algo peculiar? ¡Pues resulta que la regla de inferencia que dijimos es una tatuología!
En el caso en donde una regla de inferencia sea una tautología, diremos que es una regla de inferencia válida .
Los ingredientes de la validez
Ahora que tenemos las partes de las inferencias matemáticas, veamos un poco su comportamiento para ver cuándo en efecto es verdadera. Esto a la vez nos ayudará a entender la noción de «de la veracidad de las premisas sale la veracidad de la conclusión».
y queremos ver si es válida, pero no queremos hacer todos los renglones de la tabla de verdad. Podemos ahorrarnos mucho trabajo como sigue.
En el lado izquierdo tenemos la conjunción $P_1 \land P_2 \land \dots \land P_n$. Si alguna de las premisas fuera falsa, esta conjunción sería falsa. Pero entonces la implicación $\text{Lado izquierdo}\Rightarrow Q$ sería verdadera (recuerda que en las implicaciones si el lado izquierdo es falso, la implicación es verdadera). Así, todos los renglones de la tabla de verdad donde alguna premisa sea falsa, tendremos gratuitamente que la regla de inferencia es verdadera.
Nos quedan los casos en los que todas las premisas son verdaderas. En ellos, tenemos que ver que la conclusión $Q$ también es verdadera. Así, para ver que la regla de inferencia es válida, basta ver que «en aquellos casos que las premisas son verdaderas, la conclusión también lo es».
Y al revés también se vale. Imagina que sabes que la regla de inferencia es válida y que sabes la veracidad de todas las premisas. Entonces, la conjunción $P_1 \land P_2 \land \dots \land P_n$ es verdadera y, así, forzosamente $Q$ es verdadera. En resumen:
«Si una regla de inferencia es válida (es una tautología), y sus premisas son verdaderas, entonces la conclusión es verdadera. Y viceversa, una regla de inferencia es válida cuando hemos visto que en todas las situaciones que las premisas son verdaderas, la conclusión también».
Algunos ejemplos sencillos de inferencias matemáticas válidas
A continuación vamos a ver algunos ejemplos de algunas inferencias matemáticas válidas.
La regla de inferencia válida más simple que se nos puede ocurrir es la siguiente:
$$ \begin{array}{rl}& P\\ \hline \therefore & P \end{array}$$
En donde básicamente estamos diciendo que si tenemos la premisa $P$ entonces va a pasar $P$, lo cual es muy fácil de verificar incluso platicado. Para ver que esta inferencia es válida, necesitamos que $P\Rightarrow P$ sea una tautología. Si $P$ es verdadero, la implicación es verdadera. Si $P$ es falso, la implicación (al tener su antecedente falso), es verdadera.
Veamos otro ejemplo. Considera que tenemos como premisas a $P$ y $Q$ y como conclusión a $P\land Q$. En este caso tendríamos la regla de inferencia:
Esto claramente es válido, pues la proposición $(P \land Q) \Rightarrow (P \land Q)$ siempre es cierta.
Nota que para que una regla de inferencia no sea válida, se tenga que tener ‘un caso’ en que las premisas sean ciertas y la conclusión no. Por ejemplo, considera la siguiente regla de inferencia que nos diría algo así como que «de cualquier cosa $P$ podemos deducir cualquier cosa $Q$»:
$$ \begin{array}{rl} & P \\ \hline \therefore & Q \end{array}$$
Esta regla de inferencia no es válida (¡qué bueno!). La razón es que la implicación $P\Rightarrow Q$ no es una tautología. Para ver esto, notemos que si $P$ es verdadero y $Q$ es falso, entonces $P\Rightarrow Q$ es falso.
Un ejemplo más complicado de inferencia válida
Ahora hagamos un ejemplo más elaborado, en el que aprovecharemos lo que platicamos sobre «pensar que las premisas son verdaderas». Imaginemos que queremos pensar que la siguiente inferencia es válida:
$$ \begin{array}{rl} & P \Rightarrow Q \\ & Q \Rightarrow R \\ & Q\Rightarrow S \\ &(R\land S) \Rightarrow T \\ & P \\ \hline \therefore & T.\end{array}$$
Si alguna premisa fuera falsa, entonces el antecedente de la conjunción de las premisas es falso, y así la implicación de la inferencia sería verdadera: en los casos en los que alguna premisa es falsa, entonces no hay nada que hacer. Así, pensemos, ¿qué pasa si todas las premisas son verdaderas?
Como $P$ es verdadera y $P\Rightarrow Q$ es verdadera, entonces $Q$ es verdadera. Pero ahora, sabiendo que $Q$ es verdadera y $Q\Rightarrow R$ es verdadera, entonces $R$ es verdadera. De manera similar, $S$ es verdadera.
Como tenemos que $R$ y $S$ son verdaderas, entonces $R\land S$ es verdadera. Y como también $(R\land S) \Rightarrow T$ es verdadera, entonces $T$ es verdadera. ¡Hemos logrado el objetivo! A partir de la veracidad de las premisas llegamos a la veracidad de $T$. ¡Yay! Entonces al suponer que todas nuestras premisas fueron verdaderas, y aplicando un poco de «lógica» llegamos a que nuestra conclusión es verdadera.
Un poco de esto se va a tratar la matemática que sigue. A partir de ahora vamos a empezar a usar esta forma de pensar, estamos rascando la fibra de la matemática y con ello empieza el viaje hacia un bosque lleno de distintas áreas, desde el álgebra y el cálculo, pasando por la geometría y la probabilidad. Todas ellas llevan la capa de la matemática porque partirán de un tronco común que nosotros estamos sentando en estas entradas. Dentro de poco verás cómo todo esto se relaciona al quehacer matemático.
Más adelante…
Acabamos de establecer uno de los cimientos sobre el cuál se sustenta el pensamiento deductivo: realizar inferencias matemáticas. Es como pensaremos de ahora en adelante. No te preocupes si aún no puedes expresar bien la lógica detrás de las reglas de inferencia o sus trucos. Esto apenas comienza, pues en las siguientes entradas relacionaremos lo visto ahora con los bloques que construirán a la matemática: las demostraciones. Y por ahí conocerás un cuento que te introducirá a esta idea.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Prueba que $P \Rightarrow P$ es una regla de inferencia válida.
Verifica que las siguientes reglas de inferencia son válidas con tablas de verdad:
$$ \begin{array}{rl} & \neg P \Rightarrow \neg Q \\ & \neg P \\ \hline \therefore & \neg Q \end{array}$$
$$ \begin{array}{rl} & P \lor Q \\ & \neg P \\ \hline \therefore & Q \end{array}$$
Ahora haz lo mismo pero da un razonamiento «deductivo» (supón que todas las premisas y explica por qué la conclusión es cierta) de porqué es válida la siguiente regla de inferencia:
$$ \begin{array}{rl} & P \Rightarrow Q \\ & Q \Rightarrow R \\ \hline \therefore & P \Rightarrow R \end{array}$$
Revisa la Tabla de reglas de inferencia en la página de Wikipedia para conocer más reglas de inferencia válidas. Muestra que en efecto son reglas de inferencia válidas haciendo las tablas que verifiquen la tautología requerida.
Cuando estamos viendo si una regla de inferencia es válida, podemos «ir agregando cosas verdaderas que vayamos deduciendo a las premisas» y usarlas a su vez para seguir deduciendo nuevas cosas. El objetivo de este ejercicio es que demuestres esto. Muestra que si $P_1 \land P_2 \land \ldots \land P_n \Rightarrow Q$ es una inferencia válida y $P_1 \land P_2 \land \ldots \land P_n \land Q \Rightarrow R$ es una inferencia válida, entonces $P_1 \land P_2 \land \ldots \land P_n \Rightarrow R$ es una inferencia válida. En otras palabras, ¡prueba que la siguiente inferencia es válida! $$ \begin{array}{rl} & P_1 \land P_2 \land \ldots \land P_n \Rightarrow Q\\ & P_1 \land P_2 \land \ldots \land P_n \land Q \Rightarrow R \\ \hline \therefore & P_1 \land P_2 \land \ldots \land P_n \Rightarrow R. \end{array}$$
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
Ya hemos visto cómo podemos crear proposiciones complejas a partir de proposiciones básicas usando conectores y cuantificadores. En esta entrada repasaremos cómo hacer negaciones de los distintos conectores lógicos de los que hemos platicado, y hablaremos de cómo hacer eso mismo para los cuantificadores universales y existenciales.
Recordatorio de negaciones de conectores lógicos.
Hemos hablado de cinco conectores lógicos: negación, conjunción, disyunción, implicación y doble implicación. En entradas anteriores hemos platicado de qué sucede con algunos de ellos si los negamos.
Negación, conjunción y disyunción
Negar una negación es sencillo. Ya vimos con anterioridad que $\neg(\neg P)\equiv P$. Para la conjunción y disyunción hablamos de las leyes de De Morgan en la entrada correspondiente. Nos dicen que estos conectores se niegan como sigue:
$\neg (P \lor Q) \equiv \neg P \land \neg Q$
$\neg (P \land Q) \equiv \neg P \lor \neg Q$
Siendo que trabajemos con alguna de estas, solo es necesario recordar: «la conjunción se niega con la disyunción de las negaciones y la disyunción se niega con la conjunción de las negaciones».
Implicación
Para ver cómo es que se niega este conector, recordemos su equivalencia lógica: $$P \Rightarrow Q \equiv \neg P \lor Q.$$
Lo siguiente que podemos hacer es aplicar una ley de De Morgan:
$$\neg (P \Rightarrow Q) \equiv \neg(\neg P \lor Q) \equiv P \land \neg Q.$$
Lo cuál nos quiere decir: «la negación de la implicación es que se cumpla la hipótesis y no la tesis» o «una promesa falla cuando pasa la condición requerida, pero no sucede lo requerido».
Doble implicación
Ahora, recordemos que la doble implicación $P \Leftrightarrow Q$ la definimos mediante $(P\Rightarrow Q) \land (Q \Rightarrow P)$. De esta manera, podemos usar nuevamente leyes de De Morgan para obtener:
Esto lo podemos pensar como «Las negación de un doble condicional es que las dos proposiciones tengan valores de verdad distintos». Para que la negación de la doble implicación sea verdadera necesitamos que $P$ sea verdad y $Q$ falsa o $Q$ verdad y $P$ falsa.
Para recapitular esta parte, recuerda la siguiente tabla:
Conector
Negación
$\neg P$
$P$
$P \lor Q$
$\neg P \land \neg Q$
$P \land Q$
$\neg P \lor \neg Q$
$P \Rightarrow Q$
$P \land \neg Q $
$P \Leftrightarrow Q$
$(P \land \neg Q) \lor (Q \land \neg P)$
Negaciones de cuantificadores
Ahora que ya hemos visto sobre las negaciones de los conectores, es turno de que hablemos un poco de los cuantificadores. Y para esto recordemos que un cuantificador nos da información sobre los posibles valores de verdad de un predicado a través de un universo.
Negación de cuantificadores universales
Observa por un momento el siguiente predicado:
«Todos los números primos son impares»
Esta proposición la podemos ver de la forma $\forall x: P(x)$ en el universo de discurso de los números enteros. Y la proposición nos dice que cada número primo que tomemos, será impar. ¿Esto es verdad? Pues resulta que no. Y de hecho el único número primo que no es impar es el 2. En este caso no podemos decir que sea verdad la proposición cuantificada, esto pues existe al menos un número entero que no cumple la proposición. ¿Ves a dónde vamos con las palabras resaltadas?
Para negar el cuantificador $\forall$ usamos el cuantificador $\exists$ diciendo que existe un elemento que no cumple la propiedad:
Pensemos en el significado de la expresión. Si tenemos $\neg(\forall x: P(x))$ significa que en el universo de discurso, existe una manera de elegir a $x$, digamos $x=a$ donde $P(a)$ es falsa, es decir $\neg P(a)$ es verdadera.
Negación de cuantificadores existenciales
Por otro lado, pensemos en el siguiente ejemplo:
«Existe un número entero mayor a 1 y menor a 2»
Para poder decir si es verdad o no, deberíamos ponernos de acuerdo en qué es un número entero o qué significa que sea menor o mayor que otro. Pero nuestra intuición nos dice que esto no es cierto (y estamos en lo correcto al pensar así). Ahora ¿Cómo se te ocurre que podríamos negar la expresión $\exists x: P(x)$, donde nuestro universo de discurso son los números enteros y $P(x) : 1<x \land x<2$? Pues necesitaríamos que no exista algún elemento que cumpla la condición. Entonces podemos notar que lo que nos dice esta negación es que cualquier elemento que tomemos de nuestro universo de discurso, no cumplirá con la proposición. Es decir, «Para todo $x$ en el universo de discurso, no se cumplirá el predicado». Dicho de otra forma:
Vayamos un paso más allá, pues $P(x) : 1<x \land x<2$ es una conjunción. Al negarla, por leyes de De Morgan obtenemos una disyunción $\neg P(x): \neg(1<x) \lor \neg (x<2)$. Así, podríamos concluir entonces que la negación de
«Existe un número entero $x$ tal que $x>1$ y $x<2$.»
es
«Para todo número entero $x$, o bien no se cumple $x>1$ o bien no se cumple $x<2$.»
Negar hasta lo más profundo posible
Cuando hablamos de negar una proposición matemática compuesta por proposiciones específicas, o bien de negar una fórmula proposicional, nuestro objetivo es llevar las negaciones hasta las proposiciones básicas o las variables proposicionales o las variables de predicado. Por ejemplo, pensemos en simplificar la siguiente negación:
Aquí la primera negación está afectando al cuantificador existencial, entonces lo primero que hacemos es cambiarlo en un cuantificador universal de la negación:
Esta ya es la forma final que nos interesa. Nota que las negaciones ya están sólo junto a $P(x), Q(x), R(x)$, pero ya no afectan conjunciones, disyunciones, condicionales ni cuantificadores.
Más adelante…
Llegando a este punto, ya tenemos el conocimiento necesario para hablar de una sustancia muy importante en la matemática: las demostraciones. Esto es, ¿cómo podemos estar seguros de cuándo algo se cumple y cuándo no?, ¿qué significa que un enunciado se derive de otros enunciados? Y más importante: vamos a introducir algunas técnicas de demostración que te ayudarán a entender de qué estamos hablando en matemáticas cuando haya que verificar algo. Y para esto usaremos algo conocido como reglas de inferencia.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
¿Cuál es la negación de las siguientes proposiciones?
$P\lor (Q \Rightarrow S)$
$(P \Leftrightarrow (Q\land \neg S))$
$P \land (Q\lor R)$
$P \Rightarrow(Q \Rightarrow P)$
¿Cuál es la negación de las siguientes proposiciones que involucran cuantificadores?
Siguiente entrada del curso: Problemas de negaciones de proposiciones con conectores y cuantificadores
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
En la entrada anterior desarrollamos la teoría de soluciones en series de potencias alrededor de un punto ordinario de la ecuación diferencial $$a_{0}(t)\frac{d^{2}{y}}{dt^{2}}+a_{1}(t)\frac{dy}{dt}+a_{2}(t)y=0.$$ En cierta forma el teorema de existencia de soluciones con desarrollo en series de potencias alrededor del punto ordinario que probamos nos facilitó las cosas.
Sin embargo, cuando tenemos puntos singulares la teoría falla. Es por eso que debemos encontrar un método alternativo para estudiar soluciones alrededor de puntos singulares a nuestra ecuación diferencial. Antes de comenzar de manera general, lo primero que haremos será considerar una ecuación diferencial en particular, con $t_{0}=0$ como punto singular, la cual es bastante sencilla de resolver: esta es la ecuación de Euler, debido al famoso matemático Leonhard Euler (si no lo conoces o quieres saber acerca de él, te dejo el siguiente enlace a su biografía), y que tiene la forma $$t^{2}\frac{d^{2}{y}}{dt^{2}}+\alpha t\frac{dy}{dt}+\beta y=0$$ donde $\alpha$ y $\beta$ son constantes.
Resolveremos esta ecuación y en la próxima entrada trataremos de generalizar este mismo resultado a una clase más general de ecuaciones con puntos singulares.
Vamos a comenzar!
Leonhard Euler. Blog de matemática y TIC’s (2018).
Ecuación de Euler
En el primer video resolvemos de manera general la ecuación de Euler para cualquier intervalo que no contenga al punto singular $t_{0}=0$, y en el segundo video resolvemos un ejemplo particular de este tipo de ecuaciones.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Prueba que si $(\alpha -1)^{2}-4\beta=0$ entonces $W[t^{r_{1}}, t^{r_{1}}\ln{t}]\neq0$, donde $r_{1}$ es la única raíz de la ecuación cuadrática $r^{2}+(\alpha -1)r+\beta=0$. Por tanto, la solución general a la ecuación de Euler cuando $(\alpha -1)^{2}-4\beta=0$ y $t>0$ es $y(t)=c_{1}t^{r_{1}}+c_{2}t^{r_{1}}\ln{t}$.
Si $(\alpha -1)^{2}-4\beta<0$ entonces las raíces $r_{1}$ y $r_{2}$ a la ecuación $r^{2}+(\alpha -1)r+\beta=0$ son complejas. Prueba que $t^{r_{1}}$ y $t^{r_{2}}$ son efectivamente soluciones a la ecuación de Euler, y que además son linealmente independientes. Por tanto, la solución general a la ecuación de Euler cuando $(\alpha -1)^{2}-4\beta<0$ y $t>0$ es $y(t)=c_{1}t^{r_{1}}+c_{2}t^{r_{2}}$. (Sigue el hint dado en el video para hacer las cuentas más sencillas).
La solución general encontrada en el problema anterior es una función de variable compleja. Haz elecciones adecuadas de $c_{1}$ y $c_{2}$ para ver que si $r_{1}=a+bi$ y $r_{2}=a-bi$, entonces $t^{a}cos(b\ln{t})$ y $t^{a}sin(b\ln{t})$ son soluciones a la ecuación de Euler para el caso del ejercicio anterior. Prueba que éstas son soluciones linealmente independientes, y por tanto $y(t)=k_{1}t^{a}cos(b\ln{t})+k_{2}t^{a}sin(b\ln{t})$ es solución general a la ecuación de Euler, donde $y$ es una función de valores reales.
Resolver la ecuación $$t^{2}\frac{d^{2}{y}}{dt^{2}}+2t\frac{dy}{dt}+4y=0$$ tanto para $t>0$ como para $t<0$.
Resuelve el problema de condición inicial $$t^{2}\frac{d^{2}{y}}{dt^{2}}-7t\frac{dy}{dt}+9y=0; \,\,\,\,\, y((1)=0, \frac{dy}{dt}(1)=2, t>0.$$
Más adelante
Una vez que hemos encontrado la solución general a la ecuación de Euler, lo siguiente tratar de utilizar este mismo método para resolver una clase más general de ecuaciones diferenciales con puntos singulares. Dado que algunas de estas ecuaciones serán bastante complicadas de resolver, clasificaremos los puntos singulares en dos tipos: regulares e irregulares, y nos enfocaremos exclusivamente a resolver ecuaciones diferenciales alrededor de puntos singulares regulares.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada, con la ayuda de varias fórmulas y resultados que hemos visto hasta ahora, mostraremos algunas desigualdades geométricas básicas e importantes, entre ellas la desigualdad entre las medias geométrica y aritmética, y la desigualdad de Erdos Mordell.
Medias armónica, geométrica, aritmética y cuadrática
Teorema 1. Dados dos segmentos de longitudes $a$ y $b$ tenemos las siguientes desigualdades: $\dfrac{2ab}{a + b} \leq \sqrt{ab} \leq \dfrac{a + b}{2} \leq \sqrt{\dfrac{a^2 + b^2}{2}}$.
De izquierda a derecha estas cantidades se conocen como media armónica, media geométrica, media aritmética y media cuadrática de $a$ y $b$.
Demostración. Tracemos un semicírculo tomando como diámetro un segmento $BC$ de longitud $a + b$ y sea $D \in BC$ tal que $BD = a$ y $DC = b$, en $D$ levantamos una perpendicular a $BC$ que corta al arco $\overset{\LARGE{\frown}}{CB}$ en $A$, entonces $\triangle ABC$ es un triángulo rectángulo con $\angle A = \dfrac{\pi}{2}$.
Por criterio de semejanza AA $\triangle ADB \sim \triangle CDA$ y tenemos que $\dfrac{AD}{CD} = \dfrac{BD}{AD}$.
Por lo tanto $AD$ es la media geométrica de $BD$ y $DC$, esto es $AD^2 = BD \times CD$.
Figura 1
Consideremos $O$ el punto medio de $BC$, sea $E \in AO$ tal que $DE \perp AO$, como $\triangle ADO \sim \triangle AED$ entonces $\dfrac{AD}{AE} = \dfrac{AO}{AD}$ $\Rightarrow AE = \dfrac{2AD^2}{2AO} = \dfrac{2BD \times DC}{BC} = \dfrac{2ab}{a + b}$.
Por el teorema de Pitágoras en $\triangle AED$ $AD^2 = AE^2 + DE^2 \Rightarrow AE \leq AD \Rightarrow \dfrac{2ab}{a + b} \leq \sqrt{ab}$.
Por el teorema de Pitágoras en $\triangle ADO$ $AO^2 = AD^2 + DO^2 \Rightarrow AD \leq AO \Rightarrow \sqrt{ab} \leq \dfrac{a + b}{2}$.
Ahora tracemos $OF$ el radio perpendicular a $BC$, entonces $OD = \dfrac{a + b}{2} – a = \dfrac{b – a}{2}$.
Aplicando el teorema de Pitágoras a $\triangle ODF$ obtenemos, $DF^2 = OF^2 + OD^2 = (\dfrac{b – a}{2})^2 + (\dfrac{a + b}{2})^2 =\dfrac{a^2 + b^2}{2}$.
Corolario. Sean $w$, $x$, $y$, $z$ números reales positivos entonces: $wxyz \leq (\dfrac{w + x + y + z}{4})^4$, y la igualdad se da si y solo si $w = x = y = z$.
Demostración. Aplicamos la desigualdad entre las medias geométrica y aritmética a los pares de números $w$, $x$; $y$, $z$. $\sqrt{wx} \leq \dfrac{w + x}{2}$, $\sqrt{yz} \leq \dfrac{y + z}{2}$.
Por lo tanto, $\sqrt{wxyz} \leq (\dfrac{w + x}{2}) (\dfrac{y + z}{2})$.
Ahora volvemos a usar la desigualdad entre las medias geométrica y aritmética $\sqrt{\dfrac{(w + x)}{2} \dfrac{(y + z)}{2}} \leq \dfrac{\dfrac{w + x}{2} + \dfrac{y + z}{2}}{2} = \dfrac{w + x + y + z}{4}$
Por lo tanto, $\sqrt[4]{wxyz} \leq \sqrt{\dfrac{(w + x)}{2} \dfrac{(y + z)}{2}} \leq \dfrac{w + x + y + z}{4}$.
En consecuencia, $wxyz \leq (\dfrac{w + x + y + z}{4})^4$.
$\blacksquare$
Desigualdad de Erdos Mordell
Lema de Mordell. Sea $\triangle ABC$ y $P$ un punto en su interior, considera $D$, $E$ y $F$ las proyecciones de $P$ a los lados $BC$, $AC$ y $AB$ respectivamente, entonces $PA \sin A \geq PF \sin B + PE \sin C$.
Demostración. Notemos que la circunferencia con diámetro $PA$ pasa por $F$ y por $E$, pues $AP$ subtiende ángulos rectos en $F$ y $E$.
Figura 2
Por la ley extendida de los senos, $\sin BAC = \sin (\pi – BAC) = \sin EPF = \dfrac{EF}{PA}$, esto implica que $PA \sin A = EF$.
Sean $G$ y $H$ las proyecciones de $E$ y $F$ respectivamente en la recta que pasa por $P$ y $D$.
$\square FBDP$ es cíclico, pues $PB$ subtiende ángulos rectos en $F$ y $D$, entonces $\angle DBA$ y $\angle FPD$ son y suplementarios por lo tanto $\sin DBA = \sin HPF = \dfrac{FH}{FP}$.
Como resultado $FP \sin B = FH$, igualmente podemos ver que $PE \sin C = EG$.
Sea $I = EF \cap HP$, por el teorema de Pitágoras podemos ver que $IE \geq GE$ y $FI \geq FH$,
Por lo tanto, $PA \sin A \geq PF \sin B + PE \sin C$.
$\blacksquare$
Teorema 2, desigualdad de Erdos Mordell. Sea $\triangle ABC$ y $P$ un punto en su interior, considera $D$, $E$ y $F$ las proyecciones de $P$ a los lados $BC$, $AC$ y $AB$ respectivamente, entonces $PA + PB + PC \geq 2(PD + PE + PF)$.
$= PF(\dfrac{\sin^2A + \sin^2 B}{\sin A \sin B}) + PE(\dfrac{\sin^2 A + \sin^2 C}{\sin A \sin C}) + PD(\dfrac{\sin^2 B + \sin^2 C}{\sin B \sin C})$.
Sustituimos $a$ y $b$ por $a^2$ y $b^2$ en la desigualdad entre las medias geométrica y aritmética $\dfrac{a^2 + b^2}{2} \geq \sqrt{a^2b^2}$, por lo tanto, $\dfrac{a^2 + b^2}{ab} \geq 2$.
Aplicamos esto a nuestra suma y como resultado obtenemos $PA + PB + PC \geq 2(PD + PE + PF)$.
$\blacksquare$
Problema 1. Sea $\triangle ABC$ e $I$ su incentro, considera $P$, $Q$ y $R$ los puntos medios de los arcos $\overset{\LARGE{\frown}}{BC}$, $\overset{\LARGE{\frown}}{CA}$ y $\overset{\LARGE{\frown}}{AB}$ que no contienen a los vértices de $\triangle ABC$, entonces $IP + IQ + IR \geq IA + IB + IC$.
Solución. Sean $D = PQ \cap CR$, $E = QR \cap AP$ y $F = RP \cap BQ$.
Figura 3
Por la entrada anterior sabemos que $Q$ es el centro de una circunferencia que pasa por $I$, $A$ y $C$, y que $R$ es el centro de una circunferencia que pasa por $I$, $A$ y $B$, entonces $QA = QI$ y $RA = RI$.
Por lo tanto, $\square ARIQ$ es un rombo, de esto se sigue que $QR \perp AI$ y $AE = IE$.
Igualmente vemos que $RP \perp BI$, $BF = IF$ y $PQ \perp CI$, $CD = ID$.
Aplicamos la desigualdad de Erdos Mordell a $\triangle PQR$ y al punto $I$ $IP + IQ + IR \geq 2(ID + IE + IF) = 2(\dfrac{IC}{2} + \dfrac{IA}{2} + \dfrac{IB}{2})$.
En conclusión, $IP + IQ + IR \geq IA + IB + IC$.
$\blacksquare$
Desigualdades de Euler y de Padoa
Proposición 1, desigualdad de Euler. El circunradio $R$ y el inradio $r$ de todo triangulo cumplen $R \geq 2r$ y la igualdad se cumple si y solo si el triángulo es equilátero.
Demostración. La fórmula de Euler nos asegura que $0 \leq OI^2 = R(R – 2r) = R^2 – 2Rr$, donde $I$ es el incentro y $O$ el circuncentro del triángulo.
Como resultado, $R \geq 2r$.
$\blacksquare$
Proposición 2, desigualdad de Padoa. Sea $\triangle ABC$ con lados $c = AB$, $a = BC$ y $b = AC$ entonces $abc \geq (a + b – c)(a + c – b)(b + c – a)$.
Demostración. Sean $s = \dfrac{a + b + c}{2}$, $R$ el circunradio y $r$ el inradio de $\triangle ABC$, entonces tenemos las siguientes fórmulas para el área de $\triangle ABC$: $(\triangle ABC) = \sqrt{s(s – a)(s – b)(s – c)} = \dfrac{abc}{4R} = rs$.
Notemos lo siguiente $(a + b – c)(a + c – b)(b + c – a) = (2s – 2)(2s – 2b)(2s – 2a) = 8(s – c)(s – b)(s – a) $ $= \dfrac{8(\triangle ABC)^2 }{s} = \dfrac{8r^2s^2}{s} = 8r^2s$.
Por otro lado, $abc = 4Rrs$.
Por lo tanto, la desigualdad que queremos mostrar es equivalente a $8r^2s \leq 4Rrs$ que a su vez es equivalente a $2r \leq R$, lo cual es cierto por la proposición anterior.
$\blacksquare$
Transformación de Ravi
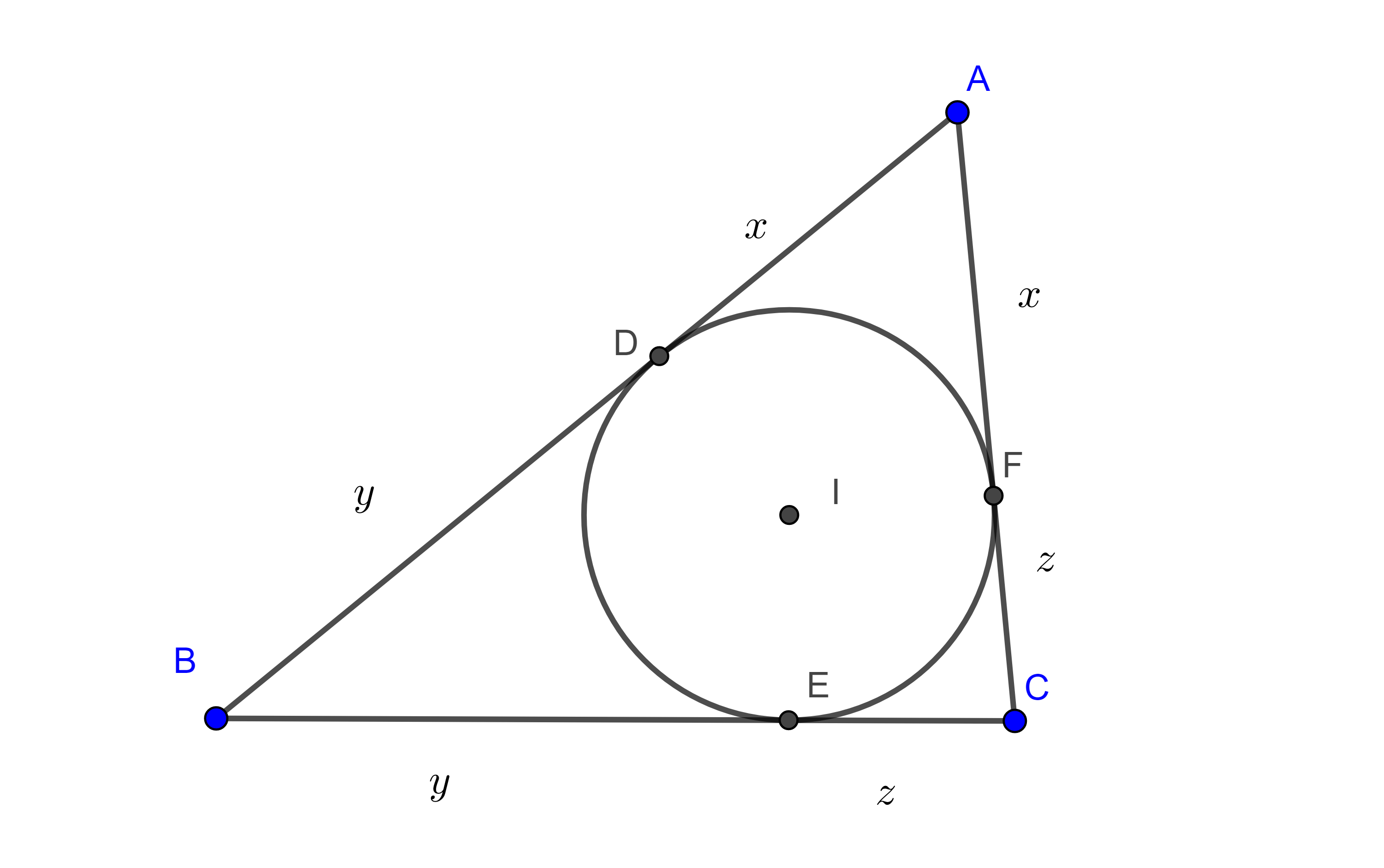
Recordemos que las tangentes desde un punto a una circunferencia son iguales, por lo que los puntos de tangencia del incírculo de un triángulo, divide al perímetro del triángulo en tres pares de segmentos iguales, así que podemos expresar a los lados de un triángulo de esta manera para resolver algunas desigualdades geométricas.
$a = BC = y + z$, $b = AC = x + z$, $c = AB = x + y$.
Figura 4
Problema 2. Para los ángulos internos de un triángulo $\triangle ABC$ tenemos la siguiente desigualdad. $\sin \dfrac{A}{2} \sin \dfrac{B}{2} \sin \dfrac{C}{2} \leq \dfrac{1}{8}$.
Solución. Usando la identidad para el seno del ángulo medio y la ley de los cosenos tenemos: $\sin^2 \dfrac{A}{2} = \dfrac{1}{2}(1 – \cos A) = \dfrac{1}{2}(1 + \dfrac{a^2 – (b^2 + c^2)}{2bc})$ $= \dfrac{a^2 – (b – c)^2}{4bc} = \dfrac{y^2 + 2yz + z^2 – (z – y)^2}{4bc} = \dfrac{yz}{bc}$.
A continuación despejamos y hacemos el producto $\sin \dfrac{A}{2} \sin \dfrac{B}{2} \sin \dfrac{C}{2} = \dfrac{\sqrt{yz}\sqrt{xz}\sqrt{xy}}{abc}$.
Ahora aplicamos la desigualdad entre las medias geométrica y aritmética $\dfrac{\sqrt{yz}\sqrt{xz}\sqrt{xy}}{abc} \leq \dfrac{1}{abc}(\dfrac{y + z}{2})(\dfrac{x + z}{2})(\dfrac{x + y}{2}) = \dfrac{abc}{8abc} = \dfrac{1}{8}$.
Por lo tanto, $\sin \dfrac{A}{2} \sin \dfrac{B}{2} \sin \dfrac{C}{2} \leq \dfrac{1}{8}$.
$\blacksquare$
Desigualdad de Nesbitt
Proposición 3. Sean $a$, $b$ y $c$ tres números positivos entonces la siguiente desigualdad es cierta $(a +b + c)(\dfrac{1}{a} + \dfrac{1}{b} + \dfrac{1}{c}) \geq 9$.
Demostración. La desigualdad entre las medias geométrica y aritmética puede ser vista como $\dfrac{a}{b} + \dfrac{b}{a} \geq 2\sqrt{\dfrac{a}{b} \dfrac{b}{a}} = 2$.
Donde la última desigualdad se obtiene al aplicar la proposición anterior.
Por lo tanto, $\dfrac{a}{b + c} + \dfrac{b}{a + c} + \dfrac{c}{a + b} \geq \dfrac{3}{2}$.
$\blacksquare$
Desigualdad de Weitzenböck
Proposición 5. Desigualdad de Weitzenböck. Si $a$, $b$, $c$ son las longitudes de los lados de $\triangle ABC$ entonces $a^2 + b^2 + c^2 \geq 4\sqrt{3} (\triangle ABC)$.
Demostración. De acuerdo a la fórmula de Herón $(\triangle ABC) = \sqrt{s(s – a)(s – b)(s – c)}$ $= \sqrt{(\dfrac{a + b + c}{2})(\dfrac{b + c – a}{2})(\dfrac{a + c – b}{2})(\dfrac{a + b – c}{2})}$ $= \dfrac{1}{4} \sqrt{2(a^2b^2 + a^2c^2 + b^2c^2) – (a^4 + b^4 + c^4)}$.
Por otro lado $\begin{equation} (a^2 – b^2)^2 + (b^2 – c^2)^2 + (c^2 – a^2)^2 \geq 0 \end{equation}$
De la desigualdad $(1)$ podemos notar que la igualdad ocurre si y solo si $a = b = c$, es decir el triángulo es equilátero.
$\blacksquare$
Más adelante…
En la próxima entrada estudiaremos algunas propiedades de las medianas y el centroide de un triángulo.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Sea $P$ un punto en el interior de un triangulo $\triangle ABC$, muestra que al menos uno de los ángulos $\angle BAP$, $\angle CBP$ y $\angle ACP$ es igual a $\dfrac{\pi}{6}$.
Considera $P$ un punto en el interior de $\triangle ABC$ cuyo circunradio es $R$, demuestra que $\dfrac{PA}{BC^2} + \dfrac{PB}{AC^2} + \dfrac{PC}{AB^2} \geq \dfrac{1}{R}$.
Sea $P$ un punto en el interior de $\triangle ABC$, denota por $R_a$, $R_b$, $R_c$ los circunradios de los triángulos $\triangle PBC$, $\triangle PAC$ y $\triangle PAB$ respectivamente, prueba que $\dfrac{PB \times PC}{R_a} + \dfrac{PA \times PC}{R_b} + \dfrac{PA \times PB}{R_c} \leq PA + PB + PC$.
Si $a$, $b$ y $c$ son los lados de un triangulo prueba que $(a + b)(b + c)(a + c) \geq 8(a + b – c)(b + c – a)(a + c -b)$.
Sean $\triangle ABC$, $AD$, $BE$, $CF$, sus alturas y $H$ el ortocentro muestra que: $i)$ $\dfrac{AD}{HD} + \dfrac{BE}{HE} + \dfrac{CF}{HF} \geq 9$, $ii)$ $\dfrac{HD}{HA} + \dfrac{HE}{HB} + \dfrac{HF}{HC} \geq \dfrac{3}{2}$.
Figura 5
Sea $\triangle ABC$ un triángulo rectángulo con catetos $a$ y $b$ e hipotenusa $c$, muestra que se cumple la siguiente desigualdad $a + b \leq \sqrt{2}c$.
Considera $A’$ y $B’$ los puntos medios de $BC$ y $AC$ en $\triangle ABC$, muestra que $3(BC + AC) > 2(AA’ + BB’)$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
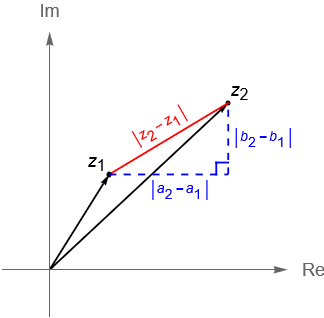
En la entrada anterior definimos el módulo de un número complejo en términos de su parte real e imaginaria. De manera geométrica observamos que el módulo nos determina la distancia que hay entre un número complejo y el origen. Por otra parte sabemos que el módulo en $\mathbb{C}$ cumple ciertas propiedades como el ser un número real no negativo y la desigualdad del triángulo. Por lo que razonando de manera análoga al caso en $\mathbb{R}^2$, mediante el módulo definiremos la distancia entre dos números complejos $z_1$ y $z_2$ como la longitud del segmento de recta que los une, figura 26.
El objetivo de esta entrada es describir algunos lugares geométricos en el plano complejo $\mathbb{C}$, haciendo uso de nuestros resultados de Geometría Analítica, para familiarizarnos con algunos conjuntos de puntos en el plano complejo con los cuales trabajaremos en la siguiente entrada y que en general nos serán de utilidad para describir de manera geométrica a los conjuntos de puntos de $\mathbb{C}$ que cumplan alguna propiedad en particular.
Métrica euclidiana en $\mathbb{C}$
Para comenzar esta entrada, primeramente consideremos la siguiente:
Definición 6.1. (Métrica euclidiana.) Sean $z_1 = a_1 + ib_1$ y $z_2 = a_2 + ib_2$ números complejos. Definimos la distancia entre $z_2$ y $z_1$, denotada por $d(z_2, z_1)$, como: \begin{equation*} d(z_2, z_1) = |z_2 \, – \, z_1| = \sqrt{\left(a_2 \, – \, a_1\right)^2 + \left(b_2 \, – \, b_1\right)^2}. \end{equation*}
A esta distancia se le conoce como la distancia o métrica euclidiana de $\mathbb{C}$, figura 26.
Figura 26: Distancia euclidiana entre $z_2$ y $z_1$.
Por nuestros cursos de Geometría Analítica sabemos que al hablar de un lugar geométrico nos referimos a un conjunto de puntos que satisfacen una condición dada. Entonces podemos interpretar de manera geométrica a una ecuación como el lugar geométrico de los puntos en el plano cuyas coordenadas la satisfacen. En este sentido, consideraremos a los lugares geométricos del plano complejo como conjuntos de puntos en $\mathbb{R}^2$ que satisfacen una ecuación y viceversa, por lo que será necesario expresar en términos de números complejos las ecuaciones de los lugares geométricos de $\mathbb{R}^2$.
De acuerdo con las entradas anteriores sabemos que podemos ubicar a un número complejo en el plano, pensado como un par ordenado de números reales, en coordenadas cartesianas o coordenadas polares. Sin embargo, considerando la observación 2.3 sabemos que para $z\in\mathbb{C}$ se cumple: \begin{equation*} \text{Re}(z) = \frac{z+\overline{z}}{2}, \quad \text{Im}(z) = \frac{z-\overline{z}}{2i}. \end{equation*}
Lo anterior nos motiva a dar la siguiente:
Definición 6.2. (Coordenadas conjugadas complejas.) Dado un número complejo $z = x+iy$, es posible representarlo en el plano complejo mediante las coordenadas $(z,\overline{z})$, a las cuales llamaremos coordenadas conjugadas complejas o simplemente coordenadas conjugadas considerando: \begin{equation*} x = \frac{z+\overline{z}}{2}, \quad y = \frac{z-\overline{z}}{2i}. \end{equation*}
Observación 6.1. Recordemos que para $A,C,D,E,F\in\mathbb{R}$ la ecuación general de segundo grado: \begin{equation*} Ax^2 + Cy^2 +Dx + Ey + F = 0, \tag{6.1} \end{equation*}
nos determina algunos lugares geométricos en $\mathbb{R}^2$. Analicemos dos de ellos para identificarlos en el plano complejo.
Dado $A=C=0$ en la ecuación (6.1), entonces se obtiene la ecuación general de la recta: \begin{equation*} Dx + Ey + F = 0. \end{equation*}
De acuerdo con la definición 6.2, podemos expresar la ecuación de la recta utilizando coordenadas conjugadas como sigue: \begin{align*} D\left(\frac{z+\overline{z}}{2}\right) + E\left(\frac{z-\overline{z}}{2i}\right) + F = 0,\\ \\ \Longrightarrow \quad z\left(D-iE\right) + \overline{z}\left(D+iE\right) +2F = 0. \end{align*}
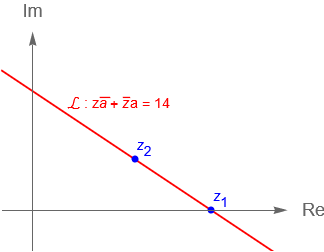
Haciendo $a=D+iE$ y $b=2F$, tenemos: \begin{equation*} \mathcal{L}: \,\, z\overline{a}+\overline{z}a + b = 0, \tag{6.1.1} \end{equation*}
la cual llamaremos ecuación general de la recta $\mathcal{L}$ en $\mathbb{C}$.
Si tenemos $A=C\neq0$ en la ecuación (6.1), entonces se obtiene la ecuación general de la circunferencia: \begin{equation*} A(x^2+y^2) + Dx + Ey + F = 0. \end{equation*}
De acuerdo con la definición 6.2, podemos expresar la ecuación general de la circunferencia utilizando coordenadas conjugadas como sigue: \begin{align*} A z\overline{z} + D\left(\frac{z+\overline{z}}{2}\right) + E\left(\frac{z-\overline{z}}{2i}\right) + F = 0,\\ \\ \Longrightarrow \quad z\overline{z} + z \left(\frac{D-iE}{2A}\right) + \overline{z}\left(\frac{D+iE}{2A}\right) + \frac{F}{A} = 0. \end{align*}
Haciendo $a=\frac{D+iE}{2A}$ y $b=\frac{F}{A}$, tenemos: \begin{equation*} z\overline{z} + z\overline{a}+\overline{z}a + b = |\,z\,|^2 + z\overline{a}+\overline{z}a + b = 0, \tag{6.1.2} \end{equation*}
la cual llamaremos ecuación general de la circunferencia en $\mathbb{C}$ cuyo centro es $-a$ y su radio es $\sqrt{|\,a\,|^2 – b}$.
Ejemplo 6.1. Expresemos las siguientes ecuaciones en términos de las coordenadas conjugadas:
a) Ecuación de una recta en el plano cartesiano $2x+3y=7$.
b) Ecuación de una circunferencia en el plano cartesiano $x^2+(y-1)^2 = 25$.
por lo que, considerando la observación 6.1, con $a = -i$ y $b = -24$ tenemos: \begin{align*} z\overline{z} – 2\left(\frac{z-\overline{z}}{2i}\right) -24 = 0,\\ \\ \Longrightarrow \quad z\overline{z} + z\overline{a} + \overline{z}a + b = 0, \tag{6.1.4} \end{align*}
la ecuación de una circunferencia en el plano complejo cuyo centro es $-a = i$ y su radio es $\sqrt{|i|^2 – (-24)} = \sqrt{25} = 5$, figura 32.
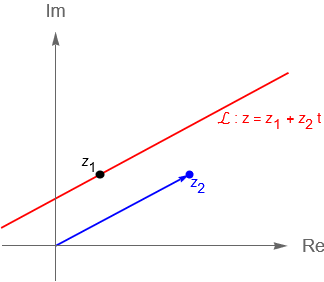
Al igual que en $\mathbb{R}^2$, es posible describir a la recta $\mathcal{L}$ en el plano complejo mediante su forma paramétrica considerando dos puntos $z_1,z_2\in\mathbb{C}$, $z_1\neq z_2$ y $z_2 \neq 0$, tales que $z_1$ está sobre la recta y el segmento de recta que va del origen a $z_2$ es paralelo a la recta, figura 28(a), entonces la recta $\mathcal{L}$ en $\mathbb{C}$, en su forma paramétrica, está dada como el conjunto de puntos $z\in\mathbb{C}$ tales que: \begin{equation*} z = z_1 + z_2t, \quad t\in\mathbb{R}. \tag{6.1.5} \end{equation*}
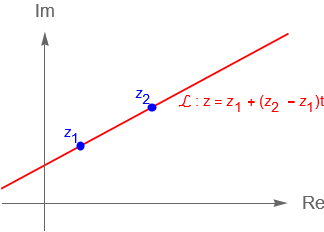
Si se tiene que $z_1$ y $z_2$, con $z_1\neq z_2$, son puntos de la recta, entonces la forma paramétrica de la ecuación de la recta $\mathcal{L}$, en $\mathbb{C}$, figura 28(b), se puede obtener como el conjunto de puntos $z\in\mathbb{C}$ tales que: \begin{equation*} z = z_1 + (z_2 \,-\, z_1)t, \quad t\in\mathbb{R}. \tag{6.1.6} \end{equation*}
Figura 28: Gráficas de una recta en su forma paramétrica en $\mathbb{C}$.
(a) Ecuación paramétrica de una recta $\mathcal{L}$ en $\mathbb{C}$ que pasa por $z_1$ y tiene dirección $z_2$.(b) Ecuación paramétrica de una recta $\mathcal{L}$ en $\mathbb{C}$ que pasa por dos puntos, $z_1$ y $z_2$.
Observación 6.2. Dado que $z_2 \neq 0$ en (6.1.5), notemos que: \begin{equation*} t = \frac{z \,-\, z_1}{z_2} \in \mathbb{R} \quad \Longleftrightarrow \quad \operatorname{Im}\left(\frac{z \,-\, z_1}{z_2}\right) = 0, \end{equation*}
por lo que una forma equivalente de expresar a una recta $\mathcal{L}$ dada por (6.1.5) es: \begin{equation*} \mathcal{L} = \left\{ z\in\mathbb{C} \,:\, \operatorname{Im}\left(\frac{z \,-\, z_1}{z_2}\right) = 0 \right\}. \end{equation*}
Una pregunta interesante que podemos hacernos es ¿qué lugares geométricos describen las siguientes ecuaciones? \begin{equation*} \operatorname{Im}\left(\frac{z \,-\, z_1}{z_2}\right) > 0, \end{equation*}
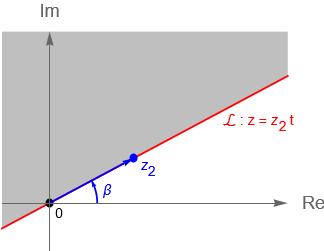
Analicemos la primera desigualdad. Sin pérdida de generalidad, desde que $z_2$ sólo nos determina la dirección de $\mathcal{L}$ entonces podemos suponer que $|\,z_2\,| = 1$. Sean $z_2 = \operatorname{cis}(\beta)$ y $z=r\,\operatorname{cis}(\theta)$.
Notemos que si $z_1=0$, tenemos por (6.1.5) una recta que pasa por el origen, además: \begin{equation*} \operatorname{Im}\left(\frac{z}{z_2}\right) = \operatorname{Im}\left(r\operatorname{cis}(\theta\,-\,\beta)\right) = r\operatorname{sen}(\theta-\beta) > 0, \end{equation*}
dado que $r=|\,z\,|\geq 0$, entonces $\operatorname{sen}(\theta-\beta) > 0$, lo cual se cumple si $\beta < \theta < \pi + \beta$. Por lo que la primera ecuación con $z_1 = 0$ nos describe un semiplano a la izquiera de la recta $\mathcal{L}$ que pasa por el origen, figura 29(a).
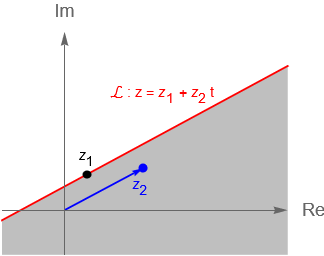
Si ahora consideramos el caso en que $z_1 \neq 0$, entonces por (6.1.5) tenemos una recta $\mathcal{L}$ que pasa por $z_1$ y es paralela a $z_2$, por lo que en dicho caso la ecuación $\operatorname{Im}\left(\dfrac{z \,-\, z_1}{z_2}\right) > 0$ nos describe al semiplano a la izquierda de la recta $\mathcal{L}$, figura 29(b).
Realizando un razonamiento análogo para la ecuación $\operatorname{Im}\left(\dfrac{z \,-\, z_1}{z_2}\right) < 0$, podemos concluir que dicha ecuación nos describe el semiplano a la derecha de una recta $\mathcal{L}$ que pasa por $z_1$ y es paralela a $z_2$, figura 30.
Figura 29: Gráficas de un semiplano izquierdo o superior en $\mathbb{C}$.
(a) Semiplano $\operatorname{Im\left(\frac{z}{z_2}\right)}>0$ a la izquierda de la recta $\mathcal{L}$ dada por $z = z_2 t$.(b) Semiplano $\operatorname{Im\left(\frac{z-z_1}{z_2}\right)}>0$ a la izquierda de la recta $\mathcal{L}$ dada por $z = z_1 + z_2 t$.
Figura 30: Semiplano derecho o inferior $\operatorname{Im\left(\frac{z-z_1}{z_2}\right)}<0$ en el plano complejo $\mathbb{C}$.
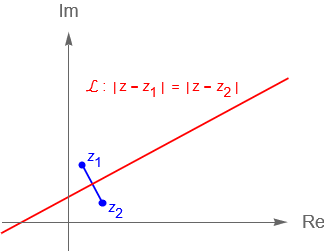
Observación 6.3. Otra forma de describir una recta $\mathcal{L}$ en el plano complejo $\mathbb{}$ es la siguiente. Sean $z_1, z_2 \in \mathbb{C}$, con $z_1 \neq z_2$. Notemos que la ecuación: \begin{equation*} |\,z \,-\, z_1\,| = |\,z \,-\, z_2\,|, \end{equation*}
nos dice que la distancia de $z \in \mathbb{C}$ a los puntos $z_1$ y $z_2$ es la misma, es decir que $z$ está en la mediatriz del segmento que une a $z_1$ con $z_2$, figura 31.
Figura 31: Mediatriz $\mathcal{L}$ del segmento que va de $z_1$ a $z_2$ en $\mathbb{C}$.
Por otra parte, sabemos que la ecuación (6.1) determina otras cónicas además de la circunferencia, por lo que es posible proceder del mismo modo que en los dos casos de la observación 6.1 para obtener las ecuaciones correspondientes a dichos lugares geométricos. Sin embargo podemos hacer uso de la distancia euclidiana de $\mathbb{C}$ para describir dichos lugares geométricos mediante sus definiciones, es decir pensando a las cónicas como conjuntos de puntos que satisfacen ciertas condiciones relacionadas con la distancia entre puntos.
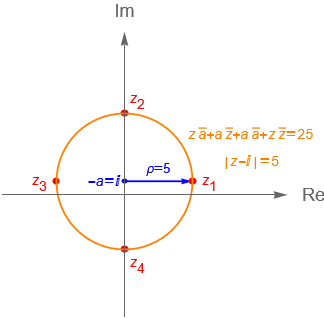
Consideremos el ejemplo 6.1, inciso b, sabemos que dicha circunferencia está centrada en $-a=i$ y tiene radio $\rho = 5$. De acuerdo con la definición de una circunferencia sabemos que los puntos cuya distancia al centro $i$ sea igual a 5 pertenecen a la circunferencia descrita por la ecuación (6.1.4), lo cual podemos expresarlo como el conjunto de números complejos $z$ tales que: \begin{align*} |\,z \,-\, i\,| = 5 \quad \Longleftrightarrow \quad |\,z \,-\, i\,|^2 = 25. \tag{6.1.7} \end{align*}
Figura 32: Circunferencia en $\mathbb{C}$ de radio $\rho=5$ y centro $-a=i$ con algunos de sus puntos.
Notemos que podemos reescribir (6.1.7) como (6.1.4) utilizando las propiedades del módulo: \begin{align*} |\,z\,-\,i\,|^2 & = (z\,-\,i)\left(\overline{z}-\overline{i}\right)\\ & = |\,z\,|^2 – \, \overline{i}z -i\overline{z} + |\,i\,|^2\\ & = z\overline{z} + zi \, – \, \overline{z}i + 1\\ & = z\overline{z} + z\overline{a} + \overline{z}a + 1\\ & = 25. \end{align*}
Considerando (6.1.7) es fácil ver que los puntos $z_1 = 5+i$, $z_2 = 6i$, $z_3 = -5 + i$ y $z_4 = -4i$ pertenecen a dicha circunferencia, figura 32.
Lo anterior nos deja ver que tanto (6.1.4) como (6.1.7) nos describen al mismo lugar geométrico en el plano complejo, es decir una circunferencia de radio $\rho=5$ centrada en $i$.
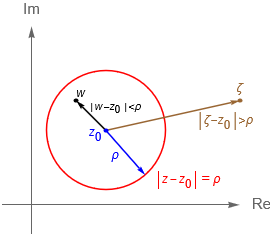
Podemos generalizar el resultado anterior para describir a una circunferencia en el plano complejo expresando a la ecuación (6.1.2) mediante la definición de dicho lugar geométrico, es decir, como el conjunto de números complejos $z$ que equidistan del punto $z_0=-a$, donde $a$ está dada como en (6.1.2), llamado centro, una distancia $\rho$, llamada radio: \begin{equation*} |\,z – z_0\,| = \rho \quad \Longleftrightarrow \quad |\,z – z_0\,|^2 = \rho^2. \tag{6.1.8} \end{equation*}
Figura 33: Circunferencia en $\mathbb{C}$ de radio $\rho$ y centro $z_0$.
Una pregunta que podemos plantearnos es ¿qué lugares geométricos nos describen las siguientes desigualdades? \begin{align*} |\,z – z_0\,| < \rho,\\ |\,z – z_0\,| > \rho. \end{align*}
De manera geométrica es claro que la primera desigualdad nos describe a los puntos $z\in\mathbb{C}$ que se encuentran dentro de la circunferencia de radio $\rho$ y centro $z_0$, sin considerar propiamente a los que caen en dicha circunferencia. Mientras que la segunda desigualdad nos describe a los puntos en $z\in\mathbb{C}$ que caen fuera de la circunferencia centrada en $z_0$ y de radio $\rho$, sin considerar tampoco a los puntos de la circunferencia.
Figura 34: Punto $w\in\mathbb{C}$ dentro de la circunferencia $|\,z-z_0\,|=\rho$ y punto $\zeta\in\mathbb{C}$ fuera de la circunferencia $|\,z-z_0\,|=\rho$.
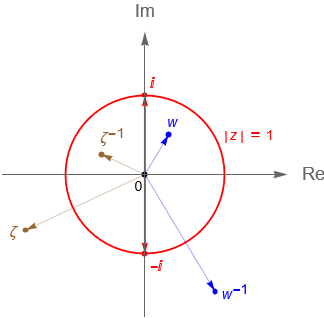
De acuerdo con la observación 3.3, tenemos que para un número complejo $z\neq0$: \begin{equation*} z^{-1} = \frac{1}{z} = \frac{\overline{z}}{| \, z \, |^2}. \end{equation*}
Analicemos los siguientes casos:
Si $|\,z\,|>1$, entonces $\dfrac{1}{|\,z\,|}<1$.
Si $|\,z\,|<1$, entonces $\dfrac{1}{|\,z\,|}>1$.
Si $|\,z\,|=1$, entonces $\dfrac{1}{|\,z\,|}=1$.
Geométricamente esto nos dice que para los números complejos $z$ que están fuera de la circunferencia unitaria su inverso multiplicativo está dentro de la circunferencia unitaria. Por otro parte, para los números complejos $z$ que están dentro de la circunferencia unitaria se tiene que su inverso multiplicativo está fuera de dicha circunferencia, mientras que para los números complejos $z$ que pertenecen a la circunferencia unitaria se tiene que su inverso multiplicativo también es un punto de dicha circunferencia.
Figura 35: Punto $w\in\mathbb{C}$ dentro de la circunferencia unitaria $|\,z\,|=1$. Punto $\zeta\in\mathbb{C}$ fuera de la circunferencia unitaria $|\,z\,|=1$ y el número complejo $i$ en la circunferencia unitaria $|\,z\,|=1$.
Recordemos que en $\mathbb{R}^2$ la ecuación ordinaria de una circunferencia con centro en $(x_0, y_0)$ y radio $\rho$ es: \begin{equation*} (x-x_0)^2 + (y-y_0)^2 = \rho^2. \end{equation*}
Haciendo $x(t) = \rho \operatorname{cos}(t) + x_0$ y $y(t) = \rho \operatorname{sen}(t) + y_0$, con $t\in[0,2\pi)$, obtenemos una ecuación paramétrica de dicha circunferencia.
Si consideramos a los números complejos $z$ en su forma polar, es decir $z=\rho \operatorname{cis}(\theta)$, tales que $\theta\in[0,2\pi)$, y a un punto fijo $z_0=x_0 + i y_0 \in\mathbb{C}$, entonces podemos describir a una cirunferencia en $\mathbb{C}$ de forma paramétrica como el conjunto de puntos: \begin{equation*} \{ w\in\mathbb{C} \, : \, w = z_0 + z \}. \end{equation*}
Proposición 6.1. (Distancia de un punto a una recta en $\mathbb{C}$.) Para un punto $z_0\in\mathbb{C}$, su distancia a una recta $\mathcal{L}$ dada por $z\overline{a} + \overline{z}a + b = 0$ está dada por: \begin{equation*} \frac{|\,z_0\overline{a} + \overline{z_0}a + b\,|}{2\,|\,a\,|}. \tag{6.1.9} \end{equation*}
Demostración. Sea $z_0 = x_0 + iy_0\in\mathbb{C}$. Sabemos que en $\mathbb{R}^2$ la distancia de un punto $P(x_0,y_0)$ a una recta $Dx + Ey + F = 0$ está dada por: \begin{equation*} \frac{|\,Dx_0 + Ey_0 + F \,|}{\sqrt{D^2 + E^2}}. \tag{6.1.10} \end{equation*}
De acuerdo con la observación 6.1 sabemos que podemos expresar una recta de la forma $Dx + Ey + F = 0$ como $z\overline{a} + \overline{z}a + b = 0$ donde $a = D + iE$ y $b=2F$. Por otra parte tenemos que: \begin{equation*} 2D = a + \overline{a}, \quad i2E = a – \overline{a}. \end{equation*}
Lo anterior nos deja ver que podemos utilizar (6.1.10) para obtener la distancia del punto $z_0 = x_0 + iy_0$ a la recta $z\overline{a}+\overline{z}a + b = 0$ como: \begin{align*} \frac{|\,Dx_0 + Ey_0 + F \,|}{\sqrt{D^2 + E^2}} &= \frac{|\,z_0\overline{a}+\overline{z_0}a + b \,|}{\sqrt{(a+\overline{a})^2 + \left(-i(a – \overline{a})\right)^2}}\\ & = \frac{|\,z_0\overline{a}+\overline{z_0}a + b \,|}{\sqrt{4\,|\,a\,|^2}}\\ & = \frac{|\,z_0\overline{a}+\overline{z_0}a + b \,|}{2\,|\,a\,|}. \end{align*}
$\blacksquare$
Proposición 6.2. (Distancia de un punto a una recta en su forma paramétrica en $\mathbb{C}$.) Sea $\mathcal{L}$ la recta en $\mathbb{C}$ dada por $z = z_1 + t z_2$, $z_2 \neq 0$. La distancia mínima $\delta$ de un punto $z_0 \in \mathbb{C}$ a la recta $\mathcal{L}$ es: \begin{equation*} \delta = \left|\, \frac{\operatorname{Im}\left((z-z_1)\overline{z_2}\right)}{\overline{z_2}} \,\right| = \left|\, \frac{(z – z_1)\overline{z_2} – \overline{(z-z_1)z_2}}{2\,\overline{z_2}} \,\right|. \end{equation*}
Demostración. Sea $f(t) = |\,z \,-\, z_1 -tz_2\,|^2$. Es claro que $f:\mathbb{R} \longrightarrow [0,\infty)$ es una función bien definida.
De acuerdo con la proposición 3.1 tenemos que: \begin{align*} f(t) & = |\,z \,-\, z_1 -tz_2\,|^2\\ & = |\,z \,-\, z_1\,|^2 \,-\, 2t\,\operatorname{Re}\left((z-z_1)\overline{z_2}\right) + t^2 |\,z_2\,|^2. \end{align*}
Entonces el mínimo se alzanza en: \begin{equation*} t = \frac{\operatorname{Re}\left((z-z_1)\overline{z_2}\right)}{|\,z_2\,|^2}. \end{equation*}
Dado que $z_2\neq0$, entonces $\dfrac{z_2}{|\,z_2\,|^2} = \dfrac{1}{\overline{z_2}}$.
Considerando la observación 2.3 y evaluando a $f$ en el mínimo obtenemos la distancia buscada al cuadrado, es decir: \begin{align*} \delta^2 &= \left|\,(z-z_1) \,-\, z_2\left[\frac{\operatorname{Re}\left((z-z_1)\overline{z_2}\right)}{|\,z_2\,|^2}\right] \,\right|^2\\ &= \left|\,\frac{2(z-z_1)\overline{z_2} \,-\, (z-z_1)\overline{z_2} \,-\, \overline{(z-z_1)}z_2}{2\, \overline{z_2}} \,\right|^2\\ &= \left|\,\frac{(z-z_1)\overline{z_2} \,-\, \overline{(z-z_1)}z_2}{2\, \overline{z_2}} \,\right|^2\\ &= \left|\,\frac{1}{\overline{z_2}}\frac{(z-z_1)\overline{z_2} \,-\, \overline{(z-z_1)}z_2}{2i} \,\right|^2\\ &=\left|\,\frac{\operatorname{Im}\left((z-z_1)\overline{z_2}\right)}{\overline{z_2}}\,\right|^2. \end{align*}
Por lo que tomando raíz cuadrada se sigue el resultado.
$\blacksquare$
Es claro que al usar la definición de un lugar geométrico es posible asociarle una ecuación a dicho conjunto y representarlo en el plano complejo $\mathbb{C}$. Por ejemplo, recordemos las definiciones de los siguientes lugares geométricos:
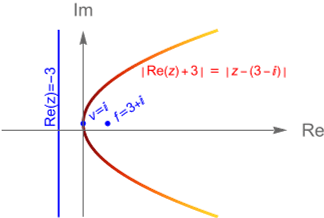
Parábola. Se define una parábola como el lugar geométrico de los puntos en $\mathbb{C}$ tales que la distancia entre estos y un punto fijo, llamado foco $f$, es igual a la distancia entre dichos puntos y una recta fija, llamada directriz $\mathcal{D}$.
Sin pérdida de generalidad, analicemos el caso de una parábola horizontal, es decir una parábola cuya directriz $\mathcal{D}$ es paralela al eje imaginario. En $\mathbb{R}^2$ sabemos que dichas rectas son de la forma $x = p$, con $p\in\mathbb{R}$ constante, por lo que para $z=x+iy\in\mathbb{C}$ tenemos que: \begin{align*} x \,-\, p = 0 \quad & \Longleftrightarrow \quad z+\overline{z} – 2p = 0\\ \\ & \Longleftrightarrow \quad \text{Re}(z) – p = 0. \tag{6.1.11} \end{align*}
De acuerdo con (6.1.1), de la observación 6.1 tenemos que la ecuación de una directriz $\mathcal{D}$ paralela al eje imaginario cumple que $a=1$ y $b = -2p$, por lo que considerando la definición de la parábola y la proposición 6.1, tenemos que una parábola con foco $f\in\mathbb{C}$ y directriz $\mathcal{D}$ vertical dada por (6.1.11) es el lugar geométrico de los puntos $z\in\mathbb{C}$ tales que: \begin{equation*} \frac{|\,z + \overline{z}+ b\,|}{2\,} = |\,z-f\,|. \tag{6.1.12} \end{equation*}
Observación 6.3. Para el caso de una parábola vertical se procede de manera análoga utilizando el hecho de que para $z=x+iy\in\mathbb{C}$ se tiene que $y=\text{Im}(z)=\frac{z-\overline{z}}{2i}$ y que su directriz $\mathcal{D}$ es paralela al eje real.
Observación 6.4. Considerando la definición de la párabola es posible obtener una ecuación más general que nos permita describir a dicho lugar geométrico. Suponiendo que la directriz $\mathcal{D}$ de una párabola está dada por la ecuación paramétrica $z_1 + tz_2$, con $t\in\mathbb{R}$, y que su foco es el punto $f\in\mathbb{C}$, entonces la ecuación de dicha párabola es: \begin{equation*} \left(\operatorname{Im}\left((z-z_1)\overline{z_2}\right)\right)^2 = |\,z_2\,|^2 \, |\,z-f\,|^2. \end{equation*}
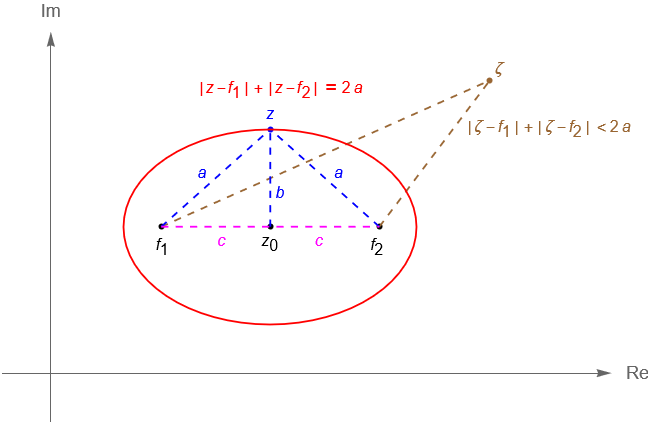
Elipse. Se define a la elipse como el lugar geométrico de los puntos en $\mathbb{C}$ tales que la suma de sus distancias a dos puntos fijos $f_1,f_2\in\mathbb{C}$, llamados focos, es constante, es decir los $z\in\mathbb{C}$ tales que: \begin{align*} |\,z-f_1\,| + |\,z-f_2\,| = 2a,\\ \\ \text{con} \,\, 2a>|\,f_1 \,-\, f_2\,|.\tag{6.1.13} \end{align*}
De acuerdo con nuestros cursos de Geometría sabemos que dados los focos de una elipse es posible identificar si se trata de una elipse vertical u horizontal, además al punto $z_0\in\mathbb{C}$ tal que $|\,z_0 \,-\, f_1\,| = |\,z_0 \,-\, f_2\,|=c$ se le conoce como el centro de la elipse y al valor $|\,f_1\,-\,f_2\,| =2c$ se le llama la distancia focal. Por otra parte tenemos que la constante $2a$ determina al eje mayor, mientras que $\frac{|\,f_1\,-\,f_2\,|}{2a} = \frac{2c}{2a} = \frac{c}{a}$ nos da la excentricidad de la elipse.
¿Qué lugares geométricos nos describen las siguientes desigualdades? \begin{align*} |\,z-f_1\,| + |\,z-f_2\,| < 2a,\\ |\,z-f_1\,| + |\,z-f_2\,| > 2a. \end{align*}
De manera geométrica es claro que la primera ecuación nos describe al conjunto de puntos $z\in\mathbb{C}$ que se encuentran dentro de la elipse con focos $f_1, f_2$ y con eje mayor $2a$. Por otra parte, la segunda ecuación nos describe a los $z\in\mathbb{C}$ que se encuentran fuera de dicha elipse, en ambos casos ninguna de las ecuaciones considera a los puntos $z\in\mathbb{C}$ que caen sobre la elipse, figura 36.
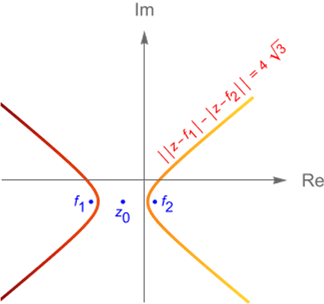
Hipérbola. Se define a la hipérbola como el lugar geométrico de los puntos $z\in\mathbb{C}$ tales que el valor absoluto de las distancias a dos puntos fijos $f_1,f_2\in\mathbb{C}$, llamados focos, es igual a una cantidad constante, positiva y menor que la distancia entre los focos, es decir: \begin{align*} |\,|z-f_1|-|z-f_2|\,| = 2a,\\ \\ \text{con} \,\, 2a<|\,f_1 \,-\, f_2\,|.\tag{6.1.14} \end{align*}
Donde $|\,f_1\,-\,f_2\,|=2c$ es la distancia focal y al punto $z_0\in\mathbb{C}$ tal que $|\,z_0\,-\,f_1\,|=|\,z_0\,-\,f_2\,|=c$ se le denomina el centro. La excentricidad de la hipérbola está dada por $\frac{|\,f_1\,-\,f_2\,|}{2a} = \frac{2c}{2a} = \frac{c}{a}$.
Figura 36: Punto $\zeta\in\mathbb{C}$ fuera de la elipse centrada en $z_0\in\mathbb{C}$ con focos $f_1, f_2\in\mathbb{C}$. El centro $z_0$ cae dentro de la elipse desde que $|\,z_0-f_1\,|+|\,z_0-f_2\,| = 2c < 2a$.
Observación 6.5. Notemos que las ecuaciones (6.1.12), (6.1.13) y (6.1.14) obtenidas para estas tres cónicas corresponden a las ecuaciones ordinarias de las cónicas en $\mathbb{R}^2$, por lo que podemos preguntarnos sobre las ecuaciones generales para dichos lugares geométricos, solo recordemos que para hablar de estas expresiones debemos considerar los casos en que sea una cónica horizontal o vertical obtenidos de la ecuación (6.1). Recuerda que la ecuación (6.1) excluye a las cónicas que están rotadas en $\mathbb{R}^2$.
Observación 6.6. Hasta ahora hemos utilizado las definiciones, como lugares geométricos, de estas tres cónicas para determinar sus ecuaciones. Sin embargo, de nuestros cursos de Geometría Analítica sabemos que es posible caracterizar a las cónicas mediante el concepto de excentricidad, es decir podemos determinar a las cónicas considerando a una recta fija $\mathcal{D}\in\mathbb{C}$, llamada directriz y a un punto fijo $f\in\mathbb{C}$, llamado foco. Si definimos a $e$ una cantidad positiva como la excentricidad, entonces el conjunto de puntos $z\in\mathbb{C}$ tales que la razón de su distancia a $f$ y a la recta $\mathcal{D}$ es siempre igual a $e$ es una sección cónica, la cual está dada por:
a) Si $e < 1$, entonces es una elipse.
b) Si $e = 1$, entonces es una párabola.
c) Si $e > 1$, entonces es una hipérbola.
El caso en que $e=0$ nos determina una circunferencia.
Puedes consultar la sección 10.6 del libro Calculus: Early transcendentals de J. Stewart para revisar esta caracterización de las secciones cónicas en $\mathbb{R}^2$.
Considerando esta forma de determinar a las cónicas, es posible utilizar la ecuación de la párabola dada en la observación 6.5 para determinar a la elipse y la hipérbola.
Ejemplo 6.2.
a) Hallar la ecuación de la parábola cuyo foco está en $f=3+i$ y su directriz $\mathcal{D}$ está dada por $z+\overline{z}+6 = 0$.
Solución. De acuerdo con la definición de la parábola sabemos que se debe satisfacer (6.1.12), es decir: \begin{align*} \frac{|\,z + \overline{z}+ 6\,|}{2\,} = |\,z-(3+i)\,|\\ \\ \underset{(6{.}1{.}11)}{\Longleftrightarrow} \quad |\,\text{Re}(z) + 3\,|= |\,z-(3+i)\,|. \end{align*}
Notemos que $\operatorname{Re}(z) + 3 \in \mathbb{R}$, por lo que, considerando la proposición 3.1: \begin{align*} |\,\text{Re}(z) + 3\,|^2= |\,z-(3+i)\,|^2\\ \\ \Longleftrightarrow \quad \left(\text{Re}(z) + 3\right)^2 = |\,z\,|^2 – 2\,\text{Re}(z(3-i)) + |\,3+i\,|^2. \end{align*}
Desarrollando lo anterior y utilizando la proposición 3.1 tenemos: \begin{equation*} |\,z\,|^2 – \text{Re}^2(z) – 12\,\text{Re}(z) + 2\,\text{Re}(iz) + 1 = 0, \end{equation*}
la cual es la ecuación de una parábola en $\mathbb{C}$ cuyo foco es $f=3+i$ y su directriz es $\text{Re}(z)=-3$, figura 37.
Si consideramos a $z=x+iy$, entonces la ecuación anterior corresponde a una parábola en $\mathbb{R}^2$ dada por: \begin{equation*} y^2-2y-12x+1=0. \end{equation*}
Figura 37: Parábola en $\mathbb{C}$ con vértice en $v=i$, foco $f=3+i$ y directriz Re$(z) = -3$.
b) Hallar la ecuación de una elipse que tiene un foco $f_1 = -5+i$, su centro es $z_0 = x_0 +iy_0 = -1+i$ y que pasa por el punto $z_1=-1-2i$.
Solución. Considerando la definición de la elipse, el segundo foco $f_2$ debe satisfacer que $c=|z_0-f_2|=|z_0-f_1|=4$. De manera geométrica sabemos que $f_1, f_2$ y $z_0$ deben ser colineales, por lo que el segundo foco es $f_2 = (x_0+c)+i y_0 = (-1+4) + i = 3+i$. Considerando que $z_1=-1-2i$ pertenece a la elipse, entonces por (6.1.13) tenemos que: \begin{align*} |\,z_1-(-5+i)\,|+ |\,z_1-(3+i)\,| & = |\,4-3i\,| + |\,-4-3i\,|\\ & = 10\\ & = 2a. \end{align*}
Entonces $a = 5$, por lo que la ecuación que describe a la elipse, figura 38, es: \begin{equation*} |\,z-f_1\,| + |\,z-f_2\,| = 10. \end{equation*}
Figura 38: Elipse en $\mathbb{C}$ con centro en $z_0=-1+i$ y focos $f_1=-5+i$, $f_2=3+i$.
c) Encontrar la ecuación de la hipérbola cuyos focos son $f_1=-(\sqrt{20}+3)-3i$, $f_2=(\sqrt{20}-3)-3i$ y que pasa por el punto $z_1=(\sqrt{12}-3)-3i$.
Solución. De acuerdo con la definición de la hipérbola, como el punto $z_1$ dado pertenece a dicho lugar geométrico entonces debe satisfacer (6.1.14), es decir: \begin{align*} |\,|\,z_1\,-\,f_1\,| – |\,z_1\,-\,f_2\,|\,| & = |\, |\,\sqrt{12}+\sqrt{20}\,| – |\,\sqrt{12}-\sqrt{20}\,|\,|\\ & = |\,4\sqrt{3}\,|\\ & = 4\sqrt{3}\\ & = 2a. \end{align*}
Entonces $a=2\sqrt{3}$, por lo que la ecuación de la hipérbola, figura 39, es: \begin{equation*} |\,|z+\sqrt{20}+3+3i|-|z-\sqrt{20}+3+3i|\,| = 4\sqrt{3}. \end{equation*}
Figura 39: Hipérbola en $\mathbb{C}$ con centro en $z_0=-3-3i$ y focos $f_1=-(\sqrt{20}+3)-3i$, $f_2=(\sqrt{20}-3)-3i$.
Tarea moral
Considerando la definición de la parábola como lugar geométrico en $\mathbb{C}$, desarrolla la observación 6.3 y determina la ecuación de una parábola vertical. Argumenta tu resultado.
La observación 6.4 nos proporciona una ecuación general de una párabola. Prueba dicha ecuación. Hint: utiliza la proposición 6.3. Comprueba con el ejemplo 6.2 inciso (a) que el resultado es correcto ¿Obtuviste la misma ecuación?
De acuerdo con la observación 6.5, desarrolla la ecuación (6.1) y trata de determinar las ecuaciones generales de las tres cónicas considerando coordenas conjugadas complejas.
¿Qué lugares geométricos representan las siguientes ecuaciones? Haz una representación de dichos conjuntos en el plano complejo $\mathbb{C}$.
a) Los $z\in\mathbb{C}$ tales que $z = \overline{z}$.
b) Los $z\in\mathbb{C}$ tales que $-\theta < \operatorname{Arg}\,z < \theta$.
c) Los $z\in\mathbb{C}$ tales que $0 < \operatorname{Im}(z) < \pi$ y $-\pi < \operatorname{Re}(z) < \pi$.
d) Los $z\in\mathbb{C}$ tales que $|\,z-1\,|^2+|\,z+1\,|^2<8$.
e) Los $z\in\mathbb{C}$ tales que $|\,z-1-i\,|+|\,z+1+i\,|\leq 2$.
Considera la definición de la hipérbola y la definición de la párabola ¿Es posible hablar de los puntos que se encuentran dentro y fuera de dichos lugares geométricos? Observa que en el caso de una circunferencia y una elipse dichos puntos se daban mediante las siguientes desigualdades respectivamente: \begin{equation*} |\,z-z_0\,| < \rho \quad \text{y} \quad |\,z-z_0\,| > \rho, \end{equation*}
Sean $z_1, z_2, z_3\in\mathbb{C}$ tales que $|\,z_1\,| = |\,z_2\,| = |\,z_3\,|$ y $z_1 + z_2 + z_3 = 0$. Prueba que $z_1, z_2$ y $z_3$ son los vértices de un triángulo equilatero inscrito en la circunferencia unitaria.
Muestra que el lugar geométrico de los puntos $z\in\mathbb{C}$ tales que $|\,z^2 – a^2\,| = a^2$, con $a\in\mathbb{R}$ una constante, es una lemniscata de Bernoulli.
Sean $z_1, z_2, z_3\in\mathbb{C}$ los vértices de un triángulo en el plano complejo $\mathbb{C}$. Prueba que dicho triángulo es equilatero si y solo si: \begin{equation*} \frac{1}{z_1 – z_2} + \frac{1}{z_2 – z_3} + \frac{1}{z_3 – z_1} = 0, \end{equation*}es decir si y solo si $z_1^2+z_2^2+z_3^2 = z_1 z_2 + z_2 z_3 + z_3 z_1$.
Sean $z_1,z_2,z_3\in\mathbb{C}$ tres puntos distintos. Prueba que dichos puntos caen en la misma recta si y solo si: \begin{equation*} \frac{z_1 – z_2}{z_1 – z_3} = t, \end{equation*} donde $t$ es un número real.
Más adelante…
En esta entrada hemos definido la distancia entre dos puntos $z$ y $w$ en el plano complejo $\mathbb{C}$ siguiendo la idea de hablar de la distancia entre dichos puntos como la longitud del segmento de recta que los une, a la cual llamamos la distancia o métrica euclidiana. Dicha definición de distancia nos permitió describir algunos lugares geométricos en el plano complejo $\mathbb{C}$ haciendo uso de nuestros resultados de geometría y las propiedades del módulo en $\mathbb{C}$.
Es de nuestro interés describir estos lugares geométricos en el plano complejo $\mathbb{C}$ porque nos permite reconocer qué puntos pertenecen o no a un conjunto mediante una condición dada. Esto nos motivará a definir el concepto de disco o vecindad en la siguiente entrada, mediante el cual podremos caracterizar mejor a los conjuntos de $\mathbb{C}$ y con ello a los puntos que los conforman.
La siguiente entrada analizaremos a detalle la distancia recién definida y veremos que resulta ser una función definida en $\mathbb{C}\times\mathbb{C}$ y que toma valores en $[0, \infty)$, la cual recibe propiamente el nombre de métrica. Consideraremos al espacio métrico formado por $\mathbb{C}$ y la métrica euclidiana $d$ y describiremos la topología inducida en $\mathbb{C}$ por dicha métrica. Además probaremos algunos resultados de dicho espacio métrico.