La esencia de las matemáticas reside en su libertad. – Georg Cantor
Introducción
Hemos dado inicio con el desarrollo de métodos de resolución de ecuaciones diferenciales. Hasta este momento sólo sabemos resolver ecuaciones lineales homogéneas y no homogéneas de primer orden. En esta entrada estudiaremos el caso no lineal.
Estudiaremos dos tipos de ecuaciones diferenciales no lineales de primer orden conocidas como ecuaciones diferenciales separables y ecuaciones diferenciales homogéneas. Cabe mencionar que las ecuaciones no lineales homogéneas que estudiaremos en esta entrada no tienen que ver con las ecuaciones homogéneas que estudiamos con anterioridad. En este caso el término homogéneo hace referencia a una propiedad que satisfacen las ecuaciones no lineales.
Comencemos con las ecuaciones diferenciales separables.
Ecuaciones diferenciales separables
Definición: Una ecuación diferencial de primer orden de la forma $$\dfrac{dy}{dx} = H(x, y) \label{1} \tag{1}$$ se dice que es separable o que tiene variables separables siempre que $H(x, y)$ puede escribirse como el producto de una función de $x$ y una función de $y$ $$H(x, y) = g(x)h(y) \label{2} \tag{2}$$
Inmediatamente nos damos cuenta que es una ecuación diferencial no lineal debido a que aparece una función dependiente de la variable dependiente $y$.
Veamos cómo encontrar la solución general de este tipo de ecuaciones.
Solución a ecuaciones separables
Es conveniente definir la función
$$h(y) = \dfrac{1}{f(y)} \label{3} \tag{3}$$
de tal manera que la ecuación (\ref{1}) se pueda escribir de la siguiente forma.
Notemos que en el lado derecho de la igualdad tenemos la función que depende de la variable independiente $x$, mientras que en el lado izquierdo tenemos la función que depende de la variable dependiente $y$, en esta situación decimos que hemos separado a la ecuación diferencial.
Es común encontrar en la literatura que la ecuación (\ref{5}) se escribe como
$$g(x) dx = f(y) dy \label{6} \tag{6}$$
Esta es la forma diferencial de la ecuación (\ref{4}), es una notación informal pero nos permite visualizar que hemos sido capaz de separar a las variables, el lado izquierdo sólo depende de $x$ y el lado derecho sólo depende de $y$.
Podemos integrar ambos lados de la ecuación. Si consideramos la ecuación en la forma (\ref{5}), entonces integramos ambos lados con respecto a la variable $x$ y si consideramos la ecuación en la forma (\ref{6}) integramos con respecto a la variable correspondiente.
existan y puedan resolverse. Una vez resueltas las integrales obtendremos una familia uniparamétrica de soluciones que usualmente se expresa de forma implícita.
Método de separación de variables
De acuerdo a lo anterior, el algoritmo que se recomienda seguir para resolver ecuaciones diferenciales separables es el siguiente.
Dada una ecuación diferencial no lineal de primer orden, el primer paso es identificar si es posible que podamos determinar una función $g = g(x)$ que sólo dependa de la variable independiente $x$ y una función $f = f(y)$ que sólo dependa de la variable dependiente $y$, si esto es posible escribimos a la ecuación diferencial en la siguiente forma.
$$f(y) \dfrac{dy}{dx} = g(x)$$
El segundo paso es integrar ambos lados de la ecuación con respecto a la variable $x$. En este caso debemos considerar en todo momento las constantes de integración.
Al resolver la integral $\int f(y) dy$ obtendremos la solución $y(x)$ que estamos buscando, ya sea de forma implícita o explicita, ambas formas son válidas.
Realicemos un ejemplo en el que apliquemos este método.
Ejemplo: Resolver la ecuación diferencial
$$\dfrac{dy}{dx} e^{(y -x)} = x$$
con la condición inicial $y(0) = \ln(2)$.
Solución: El primer paso es determinar si la ecuación es separable, es decir, si podemos hallar las funciones $g(x)$ y $f(y)$. Vemos que
\begin{align*} \dfrac{dy}{dx} e^{(y -x)} &= x \\ \dfrac{dy}{dx} e^{y} e^{-x} &= x \\ e^{y} \dfrac{dy}{dx} &= x e^{x} \end{align*}
Ya logramos escribir a la ecuación en la forma (\ref{5}), de donde podemos establecer que
$$g(x) = x e^{x} \hspace{1cm} y \hspace{1cm} f(y) = e^{y}$$
Usando la notación diferencial podemos escribir a la ecuación como
$$e^{y} dy = x e^{x} dx$$
Integremos ambos lados de la ecuación ante la respectiva variable.
$$\int {e^{y} dy} = \int {x e^{x} dx}$$
Por un lado,
$$\int {e^{y} dy} = e^{y} + k_{1}$$
Por otro lado, para la integral de $x$ usemos integración por partes considerando $u(x) = x$ y $dv(x) = e^{x}$.
\begin{align*} \int {x e^{x} dx} &= x e^{x} -\int{e^{x} dx} \\ &= x e^{x} -(e^{x} + k_{2})\\ &= x e^{x} -e^{x} -k_{2} \end{align*}
Igualando ambos resultados obtenemos lo siguiente.
\begin{align*} e^{y} + k_{1} &= x e^{x} -e^{x} -k_{2} \\ e^{y} &= x e^{x} -e^{x} -k_{2} -k_{1} \\ e^{y} &= x e^{x} -e^{x} + c \end{align*}
En donde $c = -k_{2} -k_{1}$. Por lo tanto, la solución implícita es
$$e^{y} = x e^{x} -e^{x} + c$$
Para conocer la solución explícita sólo tomamos el logaritmo natural.
$$y(x) = \ln|x e^{x} -e^{x} + c|$$
Obtengamos la solución particular aplicando la condición inicial $y(0) = \ln(2)$.
De donde $c = 3$. Por lo tanto, la solución particular es
$$e^{y} = x e^{x} -e^{x} + 3$$
O bien,
$$y(x) = \ln| x e^{x} -e^{x} + 3|$$
$\square$
Este tipo de ecuaciones son muy sencillas de resolver, prácticamente se resuelven aplicando una integración directa.
Veamos ahora las ecuaciones diferenciales no lineales homogéneas, lo interesante de este tipo de ecuaciones es que si hacemos un cambio de variable adecuado las podremos reducir a una ecuación separable las cuales ya sabemos resolver.
Ecuaciones homogéneas
Definición: Una ecuación diferencial homogénea es de la forma $$M(x, y) dx + N(x, y) dy = 0 \label{9} \tag{9}$$ donde $M$ y $N$ tienen la propiedad de que para todo $t > 0$, la sustitución de $x$ por $tx$ y la de $y$ por $ty$ hacen que $M$ y $N$ sean del mismo grado $n$, esto es $$M(tx, ty) = t^{n} M(x, y) \label{10} \tag{10}$$ $$N(tx, ty) = t^{n} N(x, y) \label{11} \tag{11}$$
Recordemos que un polinomio homogéneo es aquel en el que todos los términos son del mismo grado, por ejemplo, el polinomio
$$x^{2}y^{2} -5xy^{3} + x^{4} -y^{4}$$
es un polinomio homogéneo de grado $4$ ya que la suma de los exponentes del primer término es $2 + 2 = 4$, del segundo término es $1 + 3 = 4$ y evidentemente el exponente de los dos últimos términos es $4$. En este sentido es que la ecuación (\ref{9}) se dice que es homogénea si se satisfacen las ecuaciones (\ref{10}) y (\ref{11}) conjuntamente.
Este tipo de ecuaciones se pueden reducir a la forma de una ecuación separable (\ref{5}) y aplicando el procedimiento anterior es como podremos determinar la solución de las ecuaciones diferenciales no lineales homogéneas.
Reducción de una ecuación homogénea a una de variables separables
La ecuación diferencial que intentamos resolver es de la forma
Consideremos el cambio de variable $y = xu$, con $u = u(x)$ una función de la variable independiente $x$ y derivable. Si derivamos la función $y(x)$ aplicando la regla de la cadena, obtenemos lo siguiente.
$$\dfrac{dy}{dx} = u \dfrac{dx}{dx} + x \dfrac{du}{dx} = u + x \dfrac{du}{dx} \label{12} \tag{12}$$
Este resultado corresponde a la definición de una ecuación diferencial de variables separables. Si resolvemos esta ecuación usando el método de separación de variables habremos resuelto la ecuación homogénea.
Método de resolución de las ecuaciones diferenciales homogéneas
A continuación se establecen, como recomendación, los pasos a seguir para resolver una ecuación diferencial homogénea (\ref{9}).
El primer paso es verificar que en efecto la ecuación sea homogénea, para ello verificamos que $M$ y $N$ sean del mismo grado, es decir, que se cumplan las relaciones (\ref{10}) y (\ref{11}) conjuntamente.
Una vez que comprobemos que la ecuación es homogénea, reescribimos a la ecuación (\ref{9}) como $$M(x, y) + N(x, y) \dfrac{dy}{dx} = 0 \label{16} \tag{16}$$
Hacemos el cambio de variable $$y = ux \hspace{1cm} y \hspace{1cm} \dfrac{dy}{dx} = u + x \dfrac{du}{dx} \label{17} \tag{17}$$ Y sustituimos en la ecuación (\ref{16}).
Una vez hecha la correspondiente sustitución podremos separar las variables reduciendo el problema a una ecuación de variables separables.
Realicemos un ejemplo de una ecuación diferencial no lineal homogénea.
Ejemplo: Verificar que la siguiente ecuación diferencial es homogénea, determinar su grado y resolver la ecuación.
$(x^{2} + y^{2}) dx -xy dy = 0$
Solución: De acuerdo a (\ref{9}) identificamos a las funciones $M$ y $N$ como
Por lo tanto la ecuación sí es homogénea y el grado es $n = 2$. Reduzcamos la ecuación homogénea a una de variables separables y apliquemos el método correspondiente para resolverla.
De acuerdo al algoritmo, una vez que ya vimos que sí es homogénea, escribimos a la ecuación diferencial en la forma (\ref{16}).
$$(x^{2} + y^{2}) -(xy) \dfrac{dy}{dx} = 0$$
Hacemos el cambio de variable (\ref{17}) y sustituimos en la ecuación diferencial.
$$\left( x^{2} + (xu)^{2} \right) -x(xu) \left( u + x \dfrac{du}{dx} \right) = 0$$
Realicemos un poco de álgebra hasta reducirla a una ecuación de variables separables.
Donde $c = 2(k_{2} -k_{1})$, como $u = \dfrac{y}{x}$, sustituimos en el resultado anterior para regresar a las variables originales.
\begin{align*} \left( \dfrac{y}{x} \right) ^{2} &= 2\ln|x| + c \\ \dfrac{y^{2}}{x^{2}} &= 2\ln|x| + c \\ y^{2} &= x^{2} (2\ln|x| + c) \end{align*}
Por lo tanto, la solución implícita de la ecuación diferencial dada es
$$y^{2}(x) = x^{2} (2\ln|x| + c)$$
O bien, la solución explícita es
$$|y(x)| = x \left( \sqrt{2 \ln|x| + c} \right)$$
$\square$
Hasta aquí concluimos con esta entrada, en la siguiente continuaremos con un método más para resolver ecuaciones diferenciales no lineales de primer orden.
Tarea Moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Resolver las siguientes ecuaciones diferenciales separables.
$\dfrac{ds}{dt} = -\sin(3t)$
$\dfrac{dy}{dx} = \dfrac{y}{1 + x^{2}}$
Resolver las siguientes ecuaciones diferenciales homogéneas.
$(x -y)dx + xdy = 0$
$(y^{2} +yx)dx -x^{2}dy = 0$
Resolver los siguientes problemas con valores iniciales.
En esta entrada estudiamos dos tipos de ecuaciones diferenciales no lineales de primer orden, las separables y las homogéneas. En próximas entradas revisaremos las ecuaciones exactas, la ecuación de Bernoulli y la ecuación de Riccati.
Dedicaremos la siguiente entrada al estudio de las ecuaciones diferenciales exactas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Las leyes de la naturaleza no son más que los pensamientos matemáticos de Dios. – Euclides
Introducción
Hemos comenzado a desarrollar métodos de resolución de ecuaciones diferenciales lineales de primer orden. El tipo de ecuaciones que queremos resolver es
$$\dfrac{dy}{dx} + P(x) y = Q(x) \label{1} \tag{1}$$
En la entrada anterior vimos que la solución general $y(x)$ es la suma de la solución homogénea $y_{h}(x)$, más la solución particular $y_{p}(x)$.
En la entrada anterior mencionamos que hay dos métodos distintos para la obtención de la solución particular, ya presentamos el método por factor integrante, en este entrada vamos a desarrollar el método conocido como variación de parámetros.
Método de variación de parámetros
Sabemos que la solución de la ecuación diferencial homogénea
$$\dfrac{dy}{dx} + P(x) y = 0 \label{8} \tag{8}$$
es
$$y_{h}(x) = k e^{- \int P(x) dx}$$
Este resultado nos incita a suponer que para la ecuación no homogénea
En donde $k$ pasa a ser una función dependiente de $x$. El método de variación de parámetros consiste en determinar justamente la expresión explícita de $k(x)$.
Sustituyamos la solución propuesta (\ref{9}) en la ecuación no homogénea (\ref{1}).
Hemos obtenido la misma expresión que usando el método por factor integrante visto en la entrada anterior.
Algunas consideraciones
La solución completa (o solución general) de la ecuación diferencial lineal (\ref{1}) es la suma de la solución homogénea $y_{h}(x)$, más la solución particular $y_{p}(x)$, es importante reconocer este hecho ya que en muchas ocasiones la ecuación homogénea, y por tanto la solución homogénea, serán muy relevantes si estamos estudiando algún fenómeno real. Sin embargo, cuando nuestro objetivo es obtener la solución completa no es necesario obtener ambas soluciones por separado para después sumarlas, sino que podemos intentar obtener directamente la solución general, esto está directamente relacionado con la omisión de constantes de integración que hemos hecho, así que es momento de explicar qué está ocurriendo con estas constantes.
Es posible desarrollar los métodos por factor integrante y variación de parámetros manteniendo las constantes de integración, aunque los cálculos se vuelven más extensos, sin embargo al final todas las constantes que resulten se pueden agrupar en una sola constante $C$, es así que en ambos métodos siempre llegaremos al resultado
Donde $C$ es la constante resultante de juntar todas las constantes de integración que pudieran aparecer en el proceso.
El resultado (\ref{14}) corresponde a la solución general que hemos obtenido anteriormente, es decir, si en ambos métodos mantenemos a las constantes de integración podemos obtener la solución general. Lo que nosotros hicimos anteriormente fue que la constante $k$ de la ecuación (\ref{7}) la asociábamos a la solución homogénea (\ref{3}), de manera que al sumar ambas soluciones ya obteníamos la solución general, pero en realidad también se puede obtener de ambos métodos manteniendo a las constantes. Decidimos hacerlo así porque es importante el papel que pueden tomar por separado las soluciones homogénea y particular en algunas situaciones, además de que omitir las constantes evitó hacer cálculos más extensos en ambos métodos.
Finalmente, como ya mencionamos antes, no se recomienda resolver ecuaciones diferenciales usando las formulas obtenidas para las soluciones, sino aplicar cada paso del método correspondiente, sin embargo, a continuación presentamos una serie de pasos que se recomiendan seguir para la resolución de ecuaciones diferenciales lineales de primer orden.
Método para resolver ecuaciones lineales
Si bien es cierto que ya conocemos las formas explícitas de las soluciones de las ecuaciones diferenciales lineales, es conveniente seguir una serie de pasos para resolverlas. Dichos pasos se describen a continuación.
Escribir la ecuación diferencial lineal en la forma canónica
$$\dfrac{dy}{dx} + P(x) y = Q(x)$$
Calcular el factor integrante $\mu (x)$ mediante la fórmula
$$\mu (x) = e^{\int{P(x) dx}}$$
Multiplicar a la ecuación diferencial en su forma canónica por el factor integrante en ambos lados de la ecuación.
Identificar que el lado izquierdo de la ecuación es la derivada de $\mu(x)$ por $y(x)$ y sustituir.
$$\dfrac{d}{dx} (\mu y) = \mu (x) Q(x)$$
Integrar la última ecuación y dividir por $\mu (x)$ para obtener finalmente la solución general $y(x)$. En la última integración sí debemos considerar a la constante de integración.
Esta serie de pasos nos permiten obtener directamente la solución general de la ecuación diferencial lineal, es por ello que en el último paso sí debemos considerar a la constante de integración, dicha constante representa el resultado de juntar todas las contantes que podremos omitir en pasos intermedios.
Realicemos un ejemplo en el que apliquemos este algoritmo de resolución.
Ejemplo: Determinar la solución general de la ecuación diferencial
Donde $K$ es la constante que engloba a todas las contantes de integración que omitimos.
$\square$
Para concluir el análisis de las ecuaciones diferenciales lineales de primer orden, presentaremos el teorema de existencia y unicidad para este tipo de ecuaciones.
Teorema de existencia y unicidad
Ya presentamos el teorema de existencia y unicidad para ecuaciones diferenciales de primer orden, podemos usar este resultado para justificar el teorema de existencia y unicidad para el caso de las ecuaciones diferenciales lineales de primer orden.
Teorema: Consideremos la ecuación diferencial lineal $$\dfrac{dy}{dx} + P(x) y = Q(x)$$ Si $P(x)$ y $Q(x)$ son funciones continuas en un intervalo $\delta \in \mathbb{R}$, entonces existe una única función $\gamma (x)$ tal que satisface el problema de valor inicial (PVI): $$\dfrac{dy}{dx} + P(x) y = Q(x), \hspace{0.8cm} y(x_{0}) = y_{0}, \hspace{0.8cm} x_{0} \in \delta, \hspace{0.8cm} y_{0} \in Im(y)$$
Demostración: Consideremos la ecuación diferencial
$$\dfrac{dy}{dx} + P(x) y = Q(x)$$
Reescribamos esta ecuación en su forma normal.
$$\dfrac{dy}{dx} = Q(x) -P(x) y$$
Definimos
$$f(x, y) = Q(x) -P(x) y \label{15} \tag{15}$$
De manera que
$$\dfrac{dy}{dx} = f(x, y) \label{16} \tag{16}$$
Debido a que en un intervalo de solución $\delta$ debe satisfacerse que $P(x)$ y $Q(x)$ sean continuas, entonces tenemos garantizado que (\ref{15}) es continua y por tanto $\dfrac{\partial f}{\partial y}$ también lo es, con esto estamos cumpliendo las hipótesis del teorema de existencia y unicidad para ecuaciones diferenciales de primer orden que establecimos anteriormente, aplicando dicho teorema obtenemos que entonces existe algún intervalo $\delta_{0}: (x_{0} -h, x_{0} + h)$, $h > 0$, contenido en $\delta$, y una función única $\gamma (x)$, definida en $\delta_{0}$, que satisface la condición inicial $y(x_{0}) = y_{0}$.
$\square$
Apliquemos este resultado a la solución general. Consideremos la condición inicial $y(x_{0}) = y_{0}$ y la solución general de la ecuación diferencial no homogénea (\ref{1})
es solución del problema de valor inicial. Así, para cada $x_{0} \in \delta_{0}$, encontrar una solución particular de la ecuación (\ref{1}) es exactamente lo mismo que encontrar un valor adecuado de $k$ en la ecuación (\ref{17}), es decir, a todo $x_{0} \in \delta_{0}$ le corresponde un distinto $k$.
Con esto damos por concluido el desarrollo de métodos para resolver ecuaciones diferenciales lineales de primer orden, en la siguiente entrada comenzaremos a desarrollar métodos para resolver ecuaciones diferenciales de primer orden que no son lineales.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
De acuerdo al algoritmo para resolver ecuaciones diferenciales lineales de primer orden, encontrar la solución general de las siguientes ecuaciones diferenciales.
$3\dfrac{y}{x} -8 + 3\dfrac{dy}{dx} = 0$
$x + \dfrac{y}{x} -\dfrac{dy}{dx} = 0$
$\dfrac{dy}{dx} + \cos(x) (y -1) = 0$
Una vez que se conoce la solución general de la ecuación diferencial $$x + \dfrac{y}{x} -\dfrac{dy}{dx} = 0$$ Resolver los siguientes problemas de valor inicial y analizar cada situación considerando el teorema de existencia y unicidad.
Ya sabemos resolver ecuaciones diferenciales lineales de primer orden tanto homogéneas como no homogéneas y conocemos el teorema de existencia y unicidad que justifica los métodos que hemos desarrollado.
En la siguiente entrada comenzaremos a desarrollar métodos para resolver ecuaciones diferenciales de primer orden no lineales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Las matemáticas son el arte de la explicación. – Paul Lockhart
Introducción
Hasta ahora sólo hemos hecho un análisis cualitativo de las soluciones a distintas ecuaciones diferenciales, esto nos ha permitido tener un panorama general sobre el comportamiento de dichas soluciones y su implicación al tratarse de la descripción de un fenómeno real ya que recordemos que para alguna ecuación diferencial ordinaria de la forma
$$\dfrac{dy}{dx} = f(x, y) \label{1} \tag{1}$$
podemos obtener su campo de pendientes y a través de él trazar una infinidad de funciones que satisfacen la ecuación.
Ahora comenzaremos a desarrollar métodos analíticos para obtener explícitamente las funciones solución de una ecuación diferencial ordinaria. Cabe mencionar que no siempre será posible resolver de manera analítica una ecuación diferencial por lo que el análisis cualitativo siempre será una herramienta alterna que puede ayudar en esos casos.
Sabemos que hay diferentes tipos de ecuaciones diferenciales, en esta entrada vamos a comenzar con unas de las ecuaciones más sencillas que podemos encontrar, las ecuaciones diferenciales lineales.
Ecuaciones diferenciales lineales de primer orden
En la primer entrada hicimos una clasificación por linealidad de las ecuaciones diferenciales. Vimos que una ecuación diferencial de $n$-ésimo orden es lineal si:
Con las propiedades de que la variable dependiente $y$, así como todas sus derivadas $y^{\prime}, y^{\prime \prime}, \cdots, y^{(n)}$ son de primer grado y los coeficientes $a_{0}, a_{1}, \cdots, a_{n}$, así como la función $g(x)$ dependen a lo sumo de la variable independiente $x$. Una ecuación que no satisface estas propiedades es una ecuación no lineal.
Las primeras ecuaciones que estudiaremos son las ecuaciones diferenciales lineales de primer orden, reduciendo la ecuación (\ref{2}) a primer orden tenemos la siguiente definición.
Definición: Una ecuación diferencial de primer orden de la forma $$a_{1}(x) \dfrac{dy}{dx} + a_{0}(x) y = g(x) \label{3} \tag{3}$$ se dice que es una ecuación lineal en la variable dependiente $y$.
Como $a_{1}(x) \neq 0$ (ya que si lo es ya no tendríamos una ecuación diferencial), podemos dividir toda la ecuación por este coeficiente.
$$\dfrac{dy}{dx} + \dfrac{a_{0}(x)}{a_{1}(x)} y = \dfrac{g(x)}{a_{1}(x)}$$
$$\dfrac{dy}{dx} + P(x) y = Q(x) \label{5} \tag{5}$$
A esta ecuación se le conoce como la forma canónica y es la definición de ecuación lineal que también encontraremos en la literatura.
Lo que buscamos es una solución de la ecuación diferencial (\ref{5}) en un intervalo $\delta$ donde $P$ y $Q$ sean continuas.
Definición: En la ecuación diferencial lineal $$a_{1}(x) \dfrac{dy}{dx} + a_{0}(x) y = g(x)$$ Si $g(x) = 0$ decimos que la ecuación es homogénea y si $g(x) \neq 0$ decimos que la ecuación es no homogénea.
En la forma canónica (\ref{5}), decimos que la ecuación
$$\dfrac{dy}{dx} + P(x) y = 0 \tag{6} \label{6}$$
es la ecuación homogénea, ya que si $g(x) = 0$, entonces $Q(x) = 0$.
Nuestro objetivo es encontrar la forma explícita de la solución $y(x)$ de la ecuación diferencial lineal (\ref{5}). Esta ecuación tiene la propiedad de que la solución general $y(x)$ es la suma de la solución de la ecuación homogénea (\ref{6}) que denotaremos como $y_{h}(x)$ y llamaremos solución homogénea, más la solución de la ecuación no homogénea (\ref{5}) que denotaremos como $y_{p}(x)$ y que llamaremos solución particular, esto es
Así, para hallar la forma explícita de $y(x)$ debemos hallar la forma explícita de la solución homogénea $y_{h}(x)$ y la forma explícita de la solución particular $y_{p}(x)$ para finalmente sumar ambos resultados.
Solución a ecuaciones diferenciales lineales homogéneas de primer orden
Comencemos por resolver la ecuación diferencial homogénea (\ref{6}) para obtener la solución homogénea $y_{h}(x)$. La ecuación que queremos resolver es
$$a_{1}(x) \frac{dy}{dx} + a_{0}(x) y = 0$$
O bien,
$$\dfrac{dy}{dx} + P(x) y = 0$$
Realicemos un poco de algebra y cálculo.
\begin{align*} \dfrac{dy}{dx} + P(x) y &= 0 \\ \dfrac{dy}{dx} &= -P(x) y \\ \dfrac{1}{y} \dfrac{dy}{dx} &= -P(x) \end{align*}
Donde hemos hecho uso del teorema fundamental del cálculo y $c$ es la constante de integración. Apliquemos la exponencial en ambos lados de la ecuación.
Definimos la constante $k = e^{-c}$, obtenemos finalmente
$$y(x) = k e^{-\int P(x) dx} \label{8} \tag{8}$$
La función (\ref{8}) es solución de la ecuación diferencial homogénea (\ref{6}).
Recordemos que si lo que estamos resolviendo es una ecuación de la forma (\ref{5}), entonces $y(x) = y_{h}(x)$ es la solución de la ecuación diferencial homogénea asociada.
Realicemos un ejemplo.
Es buen momento para aconsejar no memorizar los resultados de los métodos de resolución que estudiemos en el curso y en su lugar aplicar el procedimiento para obtener la solución de una ecuación diferencial. Esto, además de ser una buena práctica, nos ayudará a desarrollar la habilidad de identificar y aplicar los distintos métodos que existen para resolver las distintas ecuaciones diferenciales que se nos puedan presentar. Por supuesto, en ocasiones el método se vuelve demasiado extenso y lo conveniente es hacer uso de resultados intermedios para avanzar más rápido.
¡Resolvamos nuestra primer ecuación diferencial!.
Ejemplo: Obtener la solución de la ecuación diferencial homogénea
$$x \dfrac{dy}{dx} + 2y = 0$$
dada la condición inicial $y(3) = 1$.
Solución: A simple vista verificamos que efectivamente se trata de una ecuación diferencial lineal homogénea, así que podemos aplicar la teoría desarrollada y no sólo eso, además se trata de un problema de valores iniciales.
Comencemos por dividir la ecuación por $x \neq 0$ para obtener la forma (\ref{6}). El resultado es
$$\dfrac{dy}{dx} + \dfrac{2}{x} y = 0$$
Identificamos que $P(x) = \dfrac{2}{x}$.
Como dijimos antes, podemos aplicar directamente el resultado (\ref{8}) y listo, sin embargo haremos todo el desarrollo para comprender bien el método.
La ecuación diferencial la podemos reescribir como
En donde definimos la constante $K = e^{k}$. Por lo tanto, la solución general de la ecuación diferencial dada es
$$y(x) = \dfrac{K}{x^{2}}$$
con $x$ en cualquier intervalo que no contenga al $0$.
Ahora apliquemos la condición inicial para obtener una solución particular. Se debe satisfacer que $y(3) = 1$, evaluemos la función en $3$ e igualemos a $1$.
$$y(3) = \dfrac{K}{3^{2}} = \dfrac{K}{9} = 1$$
De la última igualdad obtenemos que $K = 9$, por lo tanto la solución particular es
$$y(x) = \dfrac{9}{x^{2}}$$
Nota: Para evitar confusiones cabe mencionar que en el ejemplo cuando hablamos de solución general y solución particular nos referimos al contexto general de las ecuaciones diferenciales donde solucióngeneral es la función que satisface la ecuación diferencial y tienen contantes arbitrarias, mientras que la solución particular es la función que satisface la ecuación diferencial y cuyas constantes toman un valor específico, por el contrario no nos referimos a la solución general $y = y_{h} + y_{p}$ y solución particular $y_{p}$ vistos al inicio de esta entrada, pues recordemos que en esta sección estamos estudiando ecuaciones diferenciales homogéneas.
$\square$
En conclusión, ahora sabemos resolver ecuaciones diferenciales lineales homogéneas de la forma
$$\dfrac{dy}{dx} + P(x) y = 0$$
cuya solución general es
$$y(x) = k e^{- \int P(x) dx}$$
Ahora veamos el caso no homogéneo en el que $Q(x) \neq 0$.
Solución a ecuaciones diferenciales lineales no homogéneas de primer orden
La ecuación diferencial que intentamos resolver es
$$a_{1}(x) \frac{dy}{dx} + a_{0}(x) y = g(x)$$
O bien,
$$\dfrac{dy}{dx} + P(x) y = Q(x)$$
Vamos a estudiar dos métodos distintos para resolver este tipo de ecuaciones, uno de ellos es conocido como método por factor integrante y el otro como método por variación de parámetros. Esta entrada la concluiremos con el desarrollo del primer método y en la siguiente entrada estudiaremos el método por variación de parámetros.
Método por factor integrante
Consideremos la ecuación diferencial lineal no homogénea (\ref{5}). El método por factor integrante consiste en encontrar una función $\mu (x)$ que satisfaga la siguiente relación.
Es decir, que la derivada del producto de $\mu (x)$ con la solución $y(x)$ sea igual a multiplicar la ecuación original por $\mu$. La función $\mu$ debe ser una función dependiente de $x$ y derivable, de manera que, usando la regla del producto
En esta ocasión supongamos que $c_{1} = 0$, veremos más adelante que esto no afecta el resultado. Por otro lado, como $e^{x} > 0$ para toda $x$, en particular
$$e^{\int{P(x) dx}} > 0$$
Entonces aplicando la exponencial en ambos lados de la última expresión se obtiene
El resultado que obtuvimos corresponde a la solución particular $y(x) = y_{p}(x)$, como mencionamos antes, la solución completa o solución general de la ecuación (\ref{5}) es la suma de la solución homogénea más la solución particular
$$y(x) = y_{h}(x) + y_{p}(x)$$
Así, sumando el resultado (\ref{8}) con el resultado (\ref{12}) obtenemos que la solución completa de la ecuación diferencial (\ref{5}) es
La ecuación (\ref{15}) es la solución general de las ecuaciones diferenciales lineales de primer orden. En la siguiente entrada mencionaremos el por qué es posible haber tomado como cero a las constantes de integración que aparecieron en el método, sin embargo intenta justificar este hecho con lo visto hasta este momento.
Para concluir realicemos un ejemplo en el que obtengamos la solución homogénea y la solución particular por separado para después sumarlas y obtener la solución general.
Ejemplo: Determinar la solución general de la ecuación diferencial
$$\dfrac{dy}{dx} = -y + x^{2}$$
Solución: Comenzamos por reescribir la ecuación en la forma canónica (\ref{5}).
$$\dfrac{dy}{dx} + y = x^{2}$$
Identificamos que $P(x) = 1$ y $Q(x) = x^{2}$. Con el valor de $P(x)$ calculemos el factor integrante omitiendo las constantes.
Con esto concluimos esta entrada, en la siguiente estudiaremos el método de variación de parámetros.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Dadas las siguientes ecuaciones diferenciales lineales de primer orden, obtener las soluciones generales $y(x)$ calculando primero la solución homogénea $y_{h}(x)$, después la solución particular $y_{p}(x)$ y finalmente sumando los resultados. (Se pueden omitir las constantes de integración en el proceso).
$\dfrac{dy}{dx} -y = e^{2x}$
$\dfrac{dy}{dx} + y = e^{2x}$
$x \dfrac{dy}{dx} + 4y = x^{-3}e^{x}$
$x^{2} \dfrac{dy}{dx} = -2xy + 3e^{3x}$
Resolver la siguiente ecuación diferencial sujeta a la condición inicial dada (problema con valores iniciales).
$\dfrac{dy}{dx} + y = e^{-x}, \hspace{1cm} y(0) = -\dfrac{1}{4}$.
Resolver el siguiente problema.
Un marcapasos de corazón consiste en un interruptor, una batería de voltaje constante $E_{0}$, un capacitor con capacitancia constante $C$ y un corazón como un resistor con resistencia constante $R$. Cuando se cierra el interruptor, el capacitor se carga; cuando el interruptor se abre, el capacitor de descarga enviando estímulos eléctricos al corazón. Todo el tiempo el corazón se está estimulando, el voltaje $E$ a través del corazón satisface la ecuación diferencial lineal $$\dfrac{dE}{dt} = -\dfrac{1}{RC}E$$ Resolver la ecuación diferencial sujeta a la condición inicial $E(4) = E_{0}$.
Intenta justificar el hecho de que podamos omitir las constantes de integración en los métodos de resolución vistos.
Más adelante…
¡Ya resolvimos analíticamente nuestras primeras ecuaciones diferenciales!. Gran logro.
En la siguiente entrada estudiaremos el método de variación de parámetros para obtener la solución particular de la ecuación diferencial no homogénea y estableceremos una serie de pasos a seguir para resolver este tipo de ecuaciones sin tener que memorizar las formulas de las soluciones.
Finalmente retomaremos el teorema de existencia y unicidad y lo estudiaremos en el contexto de las ecuaciones diferenciales lineales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
¿Cómo es posible un error en las matemáticas?. – Henri Poincare
Introducción
Continuando con la descripción cualitativa de las ecuaciones diferenciales, en esta entrada estudiaremos las ecuaciones diferenciales en las que la función razón no depende explícitamente de la variable independiente $x$.
En la entrada anterior vimos una propiedad geométrica interesante de las ecuaciones diferenciales de la forma
$$\dfrac{dy}{dx} = f(y) \label{1} \tag{1}$$
dicha propiedad es que los elementos lineales en dos puntos distintos del plano $XY$, pero con la misma coordenada $y$, tienen la misma pendiente, esta propiedad tiene interesantes consecuencias y las estudiaremos en esta entrada.
Ecuaciones de primer orden autónomas
Definición: Una ecuación diferencial ordinaria en la que no aparece explícitamente la variable independiente $$F(y, y^{\prime}) = 0 \label{2} \tag{2}$$ se llama autónoma.
Una ecuación autónoma en su forma normal se ve como (\ref{1}).
La ecuación diferencial
$$\dfrac{dy}{dx} = 1 + 2y$$
es una ecuación diferencial autónoma, mientras que la ecuación
$$\dfrac{dy}{dx} = 2xy$$
es una ecuación no autónoma ya que la función razón
$$f(x, y) = 2xy$$
sí depende de la variable independiente $x$.
Hay muchos procesos físicos que son modelados con ecuaciones diferenciales autónomas donde la variable independiente puede ser por ejemplo el tiempo $t$, en estos casos dichos procesos no cambiarían en el tiempo.
Puntos críticos
En la ecuación diferencial autónoma (\ref{1}) las raíces de la función razón son de especial importancia.
Definición: Un número real $k$ es un punto crítico de la ecuación diferencial autónoma (\ref{1}) si es una raíz de la función razón $f$ igualada a cero, es decir, si $f(k) = 0$.
Un punto crítico también es llamado punto de equilibrio o punto estacionario.
Definición: Una solución constante $y(x) = k$ de la ecuación diferencial autónoma (\ref{1}) se llama solución de equilibrio.
Con estas dos definiciones podemos observar que si $k$ es un punto crítico de la ecuación (\ref{1}), entonces $y(x) = k$ es una solución constante de la ecuación diferencial autónoma.
Esquema de fases
En la entrada anterior vimos que una propiedad geométrica de las ecuaciones autónomas es que los elementos lineales son paralelos a lo largo de líneas horizontales en el plano $XY$, esto quiere decir que si conocemos el campo de pendientes a lo largo de una sola línea vertical $x = x_{0}$, entonces lo conocemos para todo el plano $XY$. Esta propiedad nos permite, en lugar de dibujar todo el plano, dibujar una sola línea que contiene la misma información. Esta línea se llama línea fase para la ecuación autónoma.
Definición: La línea fase de una ecuación diferencial autónoma es un diagrama en forma de línea recta que contiene la información del comportamiento de las soluciones de la ecuación diferencial.
Para ver cómo obtener los puntos críticos, soluciones de equilibrio y líneas fase realicemos el siguiente ejemplo con una ecuación logística.
Ejemplo: Obtener los puntos críticos, soluciones de equilibrio y línea fase de la siguiente ecuación diferencial autónoma.
Solución: Para obtener las soluciones de equilibrio y los puntos críticos igualamos la función razón a cero.
$$f(y) = y(\alpha -\beta y) = 0$$
La ecuación se satisface si $y = 0$ o $\alpha -\beta y = 0$, es decir, si
$$y(x) = 0 \hspace{1cm} o \hspace{1cm} y(x) = \dfrac{\alpha}{\beta}$$
Estas funciones corresponden a las soluciones de equilibrio de la ecuación diferencial y los puntos críticos no son más que las constantes $k_{1} = 0$ y $k_{2} = \dfrac{\alpha}{\beta} > 0$.
Para esbozar la línea fase comencemos por colocar dos puntos sobre una línea vertical, dichos puntos corresponden a los puntos críticos obtenidos.
Puntos críticos en la línea fase.
La línea fase es paralela al eje $Y$, o bien puede ser el mismo eje $Y$.
En este caso los puntos críticos dividen a la línea fase en tres intervalos:
Por definición los puntos críticos son los valores en los que
$$\dfrac{dy}{dx} = f(k) = 0$$
esto significa que la pendiente de los elementos lineales en los puntos críticos debe ser cero, mientras que por encima y por debajo de los puntos críticos la pendiente tiene que ser distinta de cero, así que puede haber elementos lineales con pendiente negativa o pendiente positiva.
Veamos en cada uno de los intervalos de nuestro ejemplo que signo tiene la pendiente de los elementos lineales, como se trata de un diagrama unidimensional dicho valor lo representaremos con flechas sobre la línea fase, si la pendiente es positiva colocaremos una flecha apuntando hacia arriba y si es una pendiente negativa colocaremos una flecha apuntando hacia abajo.
Para ver si la pendiente es positiva o negativa estudiemos el signo de la función razón (que es equivalente al signo de la derivada $\dfrac{dy}{dx}$) en cada uno de los intervalos. Comencemos con el intervalo $(-\infty, 0)$, en este caso $-\infty < y < 0$.
\begin{align*} y &< 0 \\ \beta y &< 0 \\ -\beta y &> 0 \\ -\beta y + \alpha > \alpha &> 0 \\ f(y) = y(\alpha -\beta y) &< 0 \\ \dfrac{dy}{dx} &< 0 \end{align*}
Este análisis nos indica que la pendiente de los elementos lineales en el intervalo $(-\infty, 0)$ es negativa.
Haciendo un análisis similar en los intervalos $\left( 0, \dfrac{\alpha}{\beta} \right)$ y $\left(\dfrac{\alpha}{\beta}, \infty \right)$ obtenemos los siguientes resultados:
En $(-\infty, 0)$ $\hspace{0.2cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) < 0$ $\Rightarrow$ La pendiente es negativa
En $\left( 0, \dfrac{\alpha}{\beta} \right)$ $\hspace{0.2cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) > 0$ $\Rightarrow$ La pendiente es positiva.
En $\left( \dfrac{\alpha}{\beta}, \infty \right)$ $\hspace{0.05cm}$ $\Rightarrow$ $f(y) = y(\alpha -\beta y) < 0$ $\Rightarrow$ La pendiente es negativa.
Como mencionamos antes, en el intervalo $(-\infty, 0)$ de la línea fase colocaremos una flecha apuntando hacia abajo debido a que la pendiente es negativa. En el intervalo $\left( 0, \dfrac{\alpha}{\beta} \right)$ colocaremos una flecha apuntando hacia arriba ya que la pendiente es positiva y finalmente en el intervalo $\left(\dfrac{\alpha}{\beta}, \infty \right)$ colocaremos nuevamente una flecha hacia abajo debido a que la pendiente vuelve a ser negativa. La línea fase de la ecuación diferencial dada se muestra en la siguiente figura.
Línea fase de la ecuación $\dfrac{dy}{dx} = y(\alpha-\beta y)$.
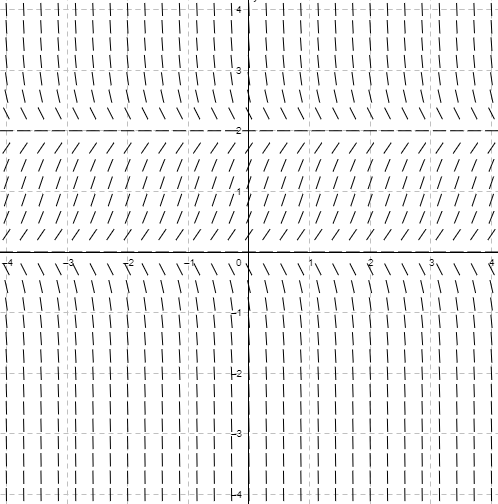
Como caso particular consideremos la ecuación diferencial autónoma
$$\dfrac{dy}{dx} = y(6 -3y)$$
Las soluciones de equilibrio son $y(x) = 0$ y $y(x) = \dfrac{\alpha}{\beta} = \dfrac{6}{3} = 2$. A continuación se muestra el campo de pendientes de esta ecuación.
Campo de pendientes de la ecuación diferencial $\dfrac{dy}{dx} = y(6 -3y)$.
Notamos que, en efecto, el valor de la pendiente de los elementos lineales en las soluciones de equilibrio es cero, por encima de $y(x) = 2$ y por debajo de $y(x) = 0$ la pendiente es negativa y entre las soluciones de equilibrio la pendiente de los elementos lineales es positiva, tal como lo mostramos en la línea fase del caso general.
$\square$
Como podemos ver, la línea fase es una gran herramienta que nos permite analizar el comportamiento de las soluciones de una ecuación diferencial autónoma gracias a que las pendientes de los elementos lineales en líneas horizontales del plano $XY$ son siempre iguales.
Con el ejemplo en mente ahora podemos establecer los pasos necesarios para dibujar una línea fase de una ecuación diferencial autónoma.
Comenzamos por dibujar una línea vertical paralela al eje $Y$ para cualquier valor de $x$.
Determinamos las soluciones de equilibrio y los puntos críticos, marcamos los puntos críticos sobre la línea vertical.
Determinamos los intervalos de $y$ en los que $f(y) > 0$ y dibujamos flechas apuntando hacia arriba en esos intervalos.
Determinamos los intervalos de $y$ en los que $f(y) < 0$ y dibujamos flechas apuntando hacia abajo en esos intervalos.
Las líneas fase nos permiten obtener una aproximación cualitativa de las curvas solución de una ecuación diferencial autónoma.
Nota: En ocasiones se usan de forma indistinta los términos puntos críticos y soluciones de equilibrio, sin embargo podemos pensar a un punto crítico como el punto $c = k$ que se coloca en la línea fase, mientras que una solución de equilibrio $y(x) = k$ como la gráfica en el plano $XY$ de una función constante para toda $x$. Cuando estamos analizando líneas fase puede ser que al punto crítico también se le llame solución de equilibrio y es correcto debido a que la línea fase representa al eje de la variable dependiente $y$ para cualquier valor de la variable independiente $x$. Lo importante es que tengamos presente las definiciones de punto crítico y de solución de equilibrio que establecimos al inicio para evitar confusiones.
Ahora veamos que nos dice esta descripción cualitativa acerca de la forma de una curva solución de una ecuación diferencial autónoma.
Curvas solución de una ecuación diferencial autónoma
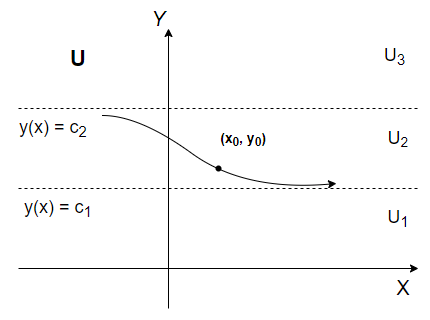
En la ecuación diferencial autónoma (\ref{1}) la función $f$ es independiente de la variable $x$, esto nos permite suponer que $f$ está definida en $x \in (-\infty, \infty)$, o en $x \in [0, \infty)$. Consideremos una región $U$ en el plano $XY$ en el que se cumple el teorema de existencia y unicidad de una solución, por este teorema sabemos que existe una solución que pasa por el punto $(x_{0}, y_{0})$. En la región $U$ supongamos que una ecuación diferencial autónoma tiene dos puntos críticos $c_{1}$ y $c_{2}$ tales que $c_{1} < c_{2}$. Las gráficas de las soluciones
$$y(x) = c_{1} \hspace{1cm } y \hspace{1cm} y(x) = c_{2}$$
son rectas horizontales que dividen a la región $U$ en tres regiones: $U_{1}, U_{2}$ y $U_{3}$, esto se puede visualizar en la siguiente figura.
Subregiones $U_{1}, U_{2}$ y $U_{3}$ de $U$.
Con estas condiciones podemos establecer las siguientes propiedades.
Si el punto $(x_{0}, y_{0})$ está en alguna subregión $U_{i}$, $i = 1, 2, 3$ y $y(x)$ es una solución cuya curva solución pasa por $(x_{0}, y_{0})$, entonces $y(x)$ debe permanecer en esa subregión $U_{i}$ para toda $x$.
Esto indica que una solución $y(x)$ no puede cruzar la grafica de una solución de equilibrio $y(x) = c$. Para argumentar este hecho consideremos a $k$ como un punto crítico de una ecuación diferencial autónoma tal que $f(k) = 0$, considerando que $f(y)$ es continua, si las soluciones $y(x)$ son cercanas a $k$, entonces el valor de $f$ debe ser pequeño, esto nos indica que las soluciones se están desplazando lentamente cuando están próximas a los puntos críticos, dicho de otra manera, una solución que se acerca a un punto crítico cuando $x$ crece (o decrece) se mueve cada vez más lento al acercarse a éste. Por el teorema de existencia y unicidad, una solución que se acerca a un punto crítico nunca llega realmente a él, es decir, la solución de equilibrio se vuelve una asíntota para todas las soluciones $y(x)$ que se aproximan al punto crítico.
En la figura anterior, por ejemplo, la curva $y(x)$ que pasa por el punto $(x_{0}, y_{0})$ debe mantenerse dentro de $U_{2}$ para toda $x$, $y(x)$ está acotada por arriba con $c_{2}$ y por abajo con $c_{1}$, esto es, $c_{1} < y(x) < c_{2}$.
Otra propiedad es la siguiente.
Por continuidad de la función $f$, debe ser $f(y) > 0$ o $f(y) < 0$ para toda $x$ en una subregión $U_{i}$, $i = 1, 2, 3$.
Vimos anteriormente que el signo de la pendiente se mantiene igual dentro de toda la región limitada por los puntos críticos, esto nos permite deducir que una curva solución $y(x)$ no puede oscilar o tener extremos relativos (máximos o mínimos) dentro de una misma región. Esto lo podemos describir con la siguiente propiedad.
Debido a que $\dfrac{dy}{dx} = f(y(x))$ es positiva o negativa en una subregión $U_{i}$, $i = 1, 2, 3$, una solución $y(x)$ es estrictamente monótona, por lo tanto no puede oscilar ni tener extremos relativos.
Ahora que conocemos estas propiedades podemos establecer una más que se puede deducir de las anteriores. Basándonos en el caso general de la imagen anterior podemos decir lo siguiente.
Si $y(x)$ es una solución dentro de la región $U_{1}$, entonces está acotada por arriba con el punto crítico $c_{1}$, esto es, $\forall$ $x$ en el intervalo $$y(x) < c_{1}$$ Esto indica que la curva solución $y(x)$ debe tender a la gráfica de la solución de equilibrio $y(x) = c_{1}$ a medida que $x \rightarrow \infty$ o $x \rightarrow -\infty$. Por otro lado, una solución $y(x)$ que este en la región $U_{2}$ está acotada por abajo con $c_{1}$ y arriba con $c_{2}$, esto es, $\forall$ $x$ en el intervalo $$c_{1} < y(x) < c_{2}$$ Entonces la curva solución $y(x)$ debe tender a las gráficas de las soluciones de equilibrio $y(x) = c_{1}$ y $y(x) = c_{2}$ conforme $x \rightarrow \infty$ en una y $x \rightarrow -\infty$ en la otra. Finalmente, si la solución está en la region $U_{3}$ entonces está acotada por abajo con $c_{2}$, es decir, $\forall$ $x$ $$y(x) > c_{2}$$ En este caso la grafica $y(x)$ debe tender a la gráfica de la solución de equilibrio $y(x) = c_{2}$ conforme $x \rightarrow \infty$ o $x \rightarrow -\infty$.
Veamos la importancia de estas propiedades en un ejemplo.
Modelo logístico de la población
En esta entrada ya estudiamos como ejemplo la ecuación logística (\ref{3}), usemos los resultados obtenidos para resolver de manera cualitativa el problema del modelo logístico de la población visto en la entrada anterior. El modelo que establecimos fue
$$\dfrac{dP}{dt} = k \left(1 -\dfrac{P}{N}\right) P \label{4} \tag{4}$$
Este modelo corresponde a una ecuación diferencial autónoma.
$$\dfrac{dP}{dt} = f(P) \label{5} \tag{5}$$
así que las curvas solución las podemos describir con la teoría que hemos construido en esta entrada.
El problema que analizábamos era el crecimiento de la población en función de su entorno y los recursos limitados a los que están sujetos. Resolvamos la ecuación diferencial de manera cualitativa aplicando lo que hemos aprendido hasta ahora e interpretemos los resultados.
Comencemos por determinar las soluciones de equilibrio y los puntos críticos, para ello igualemos la ecuación a cero.
$$\dfrac{dP}{dt} = k \left(1 -\dfrac{P}{N}\right) P = 0$$
Esta relación se satisface si
$$kP = 0 \hspace{1cm} o \hspace{1cm} 1 -\dfrac{P}{N} = 0$$
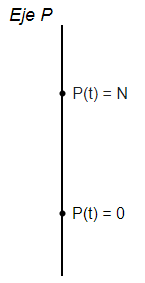
Es decir, si $P = 0$ o $P = N$. Por lo tanto, los puntos críticos son $c_{1} = 0$ y $c_{2} = N$, mientras que las soluciones de equilibrio son $P(t) = 0$ y $P(t) = N$.
Coloquemos los puntos críticos sobre la línea fase.
Puntos críticos en la línea fase.
Los puntos críticos definen tres intervalos para $P$, estos son
$$(-\infty, 0), \hspace{1cm} (0, N) \hspace{1cm} y \hspace{1cm} (N, \infty)$$
Sin embargo, como se trata de un problema real es claro que no tiene sentido que la variable población $P(t)$ sea negativa (no hay individuos negativos), así mismo no hay tiempos negativos por lo que $t > 0$, por lo tanto en este problema sólo consideraremos los intervalos $(0, N)$ y $(N, \infty)$ para $P$, así como $0 < t < \infty$.
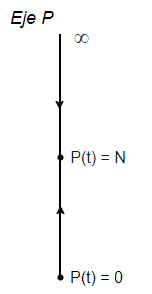
Del caso general (\ref{3}) deducimos que en el intervalo $(0, N)$ las pendientes son positivas, así que la función $P(t)$ será creciente en dicho intervalo y en $(N, \infty)$ las pendientes son negativas, por tanto la función $P(t)$ será decreciente. La línea fase final queda de la siguiente manera.
Línea fase del modelo logístico.
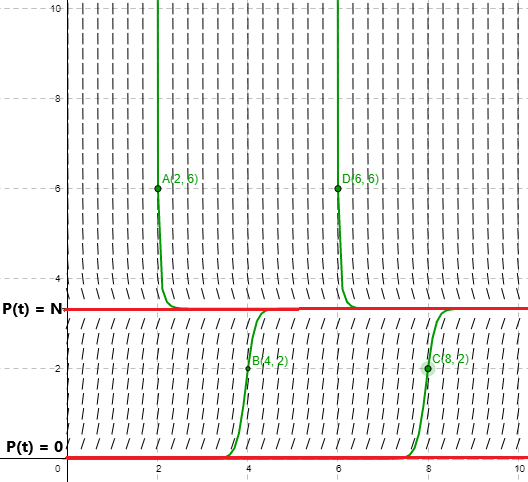
Un ejemplo de como se ve el campo de pendientes, las soluciones de equilibrio y algunas curvas solución de la ecuación logística (\ref{4}) se muestra en la siguiente figura.
Campo de pendientes de la ecuación logística (4) para valores particulares de $k$ y $N$.
De este gráfico notamos que las curvas solución cumplen con las hipótesis que establecimos al plantear el modelo, dichas hipótesis eran
Si la población es pequeña $(P(t) < N)$, la tasa de crecimiento de la población es proporcional a su tamaño.
Si la población es demasiado grande para ser soportada por su entorno y recursos $(P(t) > N)$, la población disminuirá, en este caso la tasa de crecimiento será negativa.
Las soluciones de equilibrio $P(t) = 0$ y $P(t) = N$ tienen sentido, pues si la población es cero permanecerá en cero indefinidamente y si la población es exactamente la asociada con la capacidad de soporte, entonces no crecerá ni disminuirá.
Es así que a partir de la línea fase y el campo de pendientes de una ecuación diferencial autónoma podemos esbozar varias curvas solución con distintas condiciones iniciales. En este ejemplo la única información que necesitamos es el hecho de que $P = 0$ y $P = N$ son soluciones de equilibrio, $P(t)$ crece si $0 < P < N$ y disminuye si $P > N$ o $P < 0$. Los valores exactos de $P(t)$ en cualquier tiempo dado $t$ dependerán de los valores $P(0)$, $k$ y $N$.
$\square$
Clasificación de puntos de equilibrio
Como vimos, alrededor de un punto crítico las soluciones pueden tener distintos comportamientos. Básicamente hay tres tipos de comportamiento que $y(x)$ puede tener alrededor de un punto crítico y en base a estos comportamientos podemos clasificarlos.
Supongamos que $y(x) = y_{0}$ es una solución de equilibrio de la ecuación diferencial autónoma (\ref{1}), los tres tipos de comportamiento que $y(x)$ puede tener alrededor del punto crítico $y_{0}$ son:
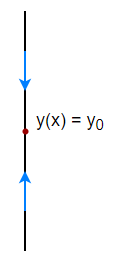
Caso 1: Por arriba de $y_{0}$ la función $y(x)$ es decreciente y por debajo de $y_{0}$ la función $y(x)$ es creciente, en este caso decimos que el punto crítico es un atractor.
$y_{0}$ es un atractor.
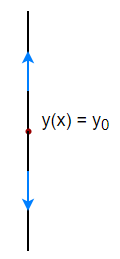
Caso 2: Por arriba de $y_{0}$ la función $y(x)$ es creciente y por debajo de $y_{0}$ la función $y(x)$ es decreciente, en este caso decimos que el punto crítico es un repulsor.
$y_{0}$ es un repulsor.
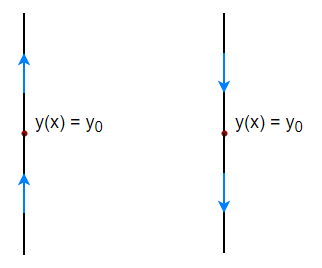
Caso 3: Tanto por arriba y por abajo de $y_{0}$ la función $y(x)$ es creciente o decreciente, en este caso decimos que el punto crítico es un nodo o punto semiestable.
$y_{0}$ es un nodo o punto semiestable.
En resumen, sea $y(x)$ solución de una ecuación diferencial autónoma (\ref{1}).
Si $f(y_{0}) = 0$, entonces $y_{0}$ es un punto crítico y $y(x) = y_{0}$ es la solución de equilibrio para toda $x$.
Si $f(y_{0}) > 0$, entonces $y(x)$ es creciente para toda $x$ y $y(x) \rightarrow \infty$, cuando $x$ incrementa, o bien $y(x)$ tiende al primer punto de equilibrio mayor que $y_{0}$.
Si $f(y_{0}) < 0$, entonces $y(x)$ es decreciente para toda $x$ y $y(x) \rightarrow -\infty$, cuando $x$ incrementa, o bien $y(x)$ tiende al primer punto de equilibrio menor que $y_{0}$.
Importante mencionar que esto también es valido para $x$ negativas. Cuando $x$ decrece podemos encontrar resultados similares.
Si $f(y_{0}) > 0$, entonces $y(x) \rightarrow -\infty$ o al siguiente punto de equilibrio menor conforme $x$ aumenta en valores negativos.
Si $f(y_{0}) < 0$, entonces $y(x) \rightarrow \infty$ o al siguiente punto de equilibrio mayor conforme $x$ aumenta en valores negativos.
Un caso especial
Consideremos la ecuación diferencial autónoma
$$\dfrac{dy}{dx} = \dfrac{1}{1 -y}$$
Intentemos esbozar la línea fase. Por definición, los puntos críticos son los valores para los que $f(y) = 0$, sin embargo en este caso $f(y)$ no puede ser cero.
Notemos que si $y > 1$, entonces $f(y) < 0$ y si $y < 1$, entonces $f(y) > 0$, pero si $y = 1$, $f(y)$ no esta definida. En este caso decimos que la línea fase tiene un agujero en $y =1$ y lo denotamos como un circulo vacío.
Agujero en la línea fase.
Las soluciones $y(x)$ de la ecuación tienden hacia $y = 1$ cuando $x$ aumenta.
Concluyamos esta entrada con el enunciado de un teorema importante.
Teorema de linearización
Existe un teorema conocido como teorema de linearización que nos ayuda a determinar el tipo de puntos críticos de una ecuación diferencial autónoma (\ref{1}), de acuerdo al comportamiento que tiene la función $f(y)$. El enunciado de este teorema es el siguiente.
Teorema: Sea $y_{0}$ un punto crítico de la ecuación diferencial autónoma (\ref{1}), donde $f$ es una función continua y diferenciable, entonces:
Si $f^{\prime}(y_{0}) < 0$, entonces $y_{0}$ es un atractor.
Si $f^{\prime}(y_{0}) > 0$, entonces $y_{0}$ es repulsor.
Si $f^{\prime}(y_{0}) = 0$ o si $f^{\prime}(y_{0})$ no existe, entonces no podemos concluir nada sobre $y_{0}$.
La demostración a este teorema la podemos encontrar en la sección de videos.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Para las siguientes ecuaciones diferenciales, esbozar las líneas fase y clasificar a los puntos críticos como atractores, repulsores o nodos según sea el caso.
$\dfrac{dy}{dx} = 3y(1 -y)$
$\dfrac{dv}{du} = \dfrac{1}{v -2}$
$\dfrac{dy}{dt} = \cos(y)$
$\dfrac{dw}{dt} = w^{2} -6w -16$
Para cada condición inicial dada, describir cualitativamente el comportamiento a largo plazo de las soluciones de la ecuación diferencial
$\dfrac{dy}{dx} = y^{2} -4y + 2$
con condición inicial
$y(0) = 0$
$y(0) = 10$
$y(3) = 1$
Más adelante…
En estas dos últimas entradas hemos estudiado a las ecuaciones diferenciales ordinarias de primer orden desde una perspectiva cualitativa, esto nos ha permitido esbozar las curvas solución y encontrar propiedades interesantes sin siquiera conocer la forma explicita de la solución. En particular, las ecuaciones diferenciales autónomas presentan propiedades interesantes que son útiles para analizar modelos que describen algún fenómeno real.
Ha llegado el momento de estudiar los distintos métodos de resolución de las ecuaciones diferenciales ordinarias de primer orden. Comenzaremos con un método sencillo que funciona sólo para ecuaciones diferenciales lineales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Ninguna investigación humana puede ser llamada verdadera ciencia si no puede ser demostrada matemáticamente. – Leonardo da Vinci
Introducción
En la entrada anterior estudiamos algunas propiedades de las soluciones de las ecuaciones diferenciales ordinarias, en particular vimos que una ecuación diferencial puede tener infinitas soluciones y el intervalo de solución puede ser cualquiera en el que la función esté definida, sea derivable $n$ veces y cuyas derivadas sean continuas. En esta entrada estudiaremos cómo obtener una solución particular de una solución general dados unos valores prescritos conocidos como condiciones iniciales y veremos la importancia de saber elegir el intervalo de solución en estos casos particulares.
En esta entrada también estudiaremos algunos problemas del mundo real que involucran ecuaciones diferenciales, a través de estos problemas introduciremos la idea de ecuación diferencial como modelo matemático. Los problemas que estudiaremos tienen el objetivo de presentar el análisis que debemos hacer al intentar modelar un problema usando ecuaciones diferenciales y no con el propósito de resolver el problema mismo, pues resolverlo significa determinar las soluciones de las ecuaciones diferenciales que surjan y hasta este momento aún no hemos visto métodos de resolución.
Problema con valores iniciales
Definición: En algún intervalo $\delta$ que contiene a $x_{0}$, el problema de resolver la ecuación diferencial $$\dfrac{d^{(n)}y}{dx^{(n)}} = f(x, y, y^{\prime}, \cdots, y^{(n –1)}) \label{1} \tag{1}$$ sujeto a que se cumpla $$y(x_{0}) = y_{0}, \hspace{0.5cm} y^{\prime}(x_{0}) = y_{1}, \hspace{0.5cm} \cdots, \hspace{0.5cm} y^{(n -1)}(x_{0}) = y_{n -1} \label{2} \tag{2}$$ donde $y_{0}, y_{1}, \cdots, y_{n -1}$ son contantes reales arbitrarias dadas, se llama problema con valores iniciales (PVI), o problema con valores iniciales de $n$-ésimo orden.
Definición: Los valores de $y(x)$ y de sus $n -1$ derivadas en el punto $x_{0}$, es decir $$y(x_{0}) = y_{0}, \hspace{0.5cm} y^{\prime}(x_{0}) = y_{1}, \hspace{0.5cm} \cdots, \hspace{0.5cm} y^{(n -1)}(x_{0}) = y_{n -1}$$ se llaman condiciones iniciales.
De manera resumida podemos decir que un problema con valores iniciales es la ecuación diferencial acompañada de condiciones iniciales.
En el caso de ecuaciones diferenciales de primer y segundo orden tendríamos el siguiente PVI respectivamente:
Resolver $\dfrac{d^{2}y}{dx^{2}} = f(x, y, y^{\prime})$ $\hspace{0.5cm}$ sujeto a $\hspace{0.5cm}$ $y(x_{0}) = y_{0}$ $\hspace{0.3cm}$ y $\hspace{0.3cm}$ $y^{\prime}(x_{0}) = y_{1}$
Geométricamente un PVI de primer orden significa que estamos buscando una solución $y(x)$ de la ecuación diferencial en un intervalo $\delta$ que contenga a $x_{0}$ tal que su gráfica pase por el punto $(x_{0}, y_{0})$.
En el caso del PVI de segundo orden estamos buscando una solución $y(x)$ de la ecuación diferencial en un intervalo $\delta$ que contenga a $x_{0}$ de tal manera que su gráfica no sólo pase por el punto $(x_{0}, y_{0})$, sino que también la pendiente a la curva en ese punto tenga como valor $m = y_{1}$.
En la entrada anterior vimos que las soluciones generales tienen constantes arbitrarias, las condiciones iniciales de un PVI nos permitirá determinar el valor de dichas contantes para obtener una solución particular, pues con frecuencia resolver un problema con valores iniciales de $n$-ésimo orden implica primero determinar una familia $n$-paramétrica de soluciones de la ecuación diferencial dada y después usando las $n$ condiciones iniciales en $x_{0}$ determinar los valores numéricos de las $n$ constantes de la familia. Es importante mencionar que la solución particular obtenida debe estar definida en algún intervalo $\delta$ que contenga al punto inicial $x_{0}$. Veamos un ejemplo.
(Más adelante en el curso estudiaremos la forma de obtener este tipo de soluciones). Encontrar la solución particular dadas las siguientes condiciones iniciales:
Solución: Como tarea moral verifica que en efecto la función dada es solución de la ecuación diferencial, por ahora asumiremos que lo es.
Tenemos un problema con valores iniciales, así que la solución está sujeta a las condiciones iniciales, lo que debemos hacer para obtener la solución particular no es más que aplicar las condiciones iniciales. En este caso $x_{0} = 0$, la primera condición inicial nos dice que se debe satisfacer $y(x_{0}) = y(0) = 4$, entonces evaluemos la solución en $x_{0} = 0$ y el resultado lo igualamos a $4$.
Sólo basta sustituir estos valores en la solución general de la ecuación diferencial para obtener la solución particular. Por lo tanto, la solución particular sujeta a las condiciones iniciales es:
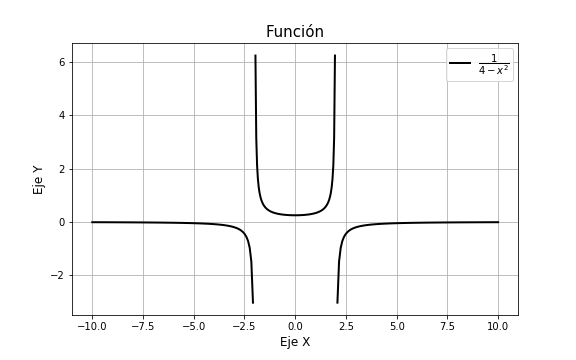
En la entrada anterior vimos que el intervalo de solución $\delta$ no es necesariamente el dominio de la función, sino que podemos tomar cualquier intervalo en el que la solución es derivable $n$ veces con derivadas continuas en ese intervalo, en el caso de los problemas con valores iniciales es necesario que el punto $x_{0}$ pertenezca al intervalo de solución $\delta$, esto en ocasiones establecerá un intervalo limitado para la solución, así que debemos tener cuidado con los valores en los que la solución particular está definida. Para visualizar este hecho retomemos el ejemplo visto en la entrada anterior donde mostramos que la función
$$y(x) = \dfrac{1}{4 -x^{2}}$$
es solución de la ecuación diferencial
$$\dfrac{dy}{dx} = 2xy^{2}$$
Realicemos este mismo ejercicio, pero ahora visto como un problema de valores iniciales y veamos la importancia de elegir correctamente el intervalo solución.
Ejemplo: La ecuación diferencial
$$\dfrac{dy}{dx} = 2xy^{2}$$
tiene como solución general a la función
$$y(x) = -\dfrac{1}{x^{2} + c_{1}}$$
Determinar la solución particular dada la condición inicial
$$y(0) = \dfrac{1}{4}$$
Solución: La solución general es
$$y(x) = -\dfrac{1}{x^{2} + c_{1}}$$
Aplicando la condición inicial obtenemos lo siguiente.
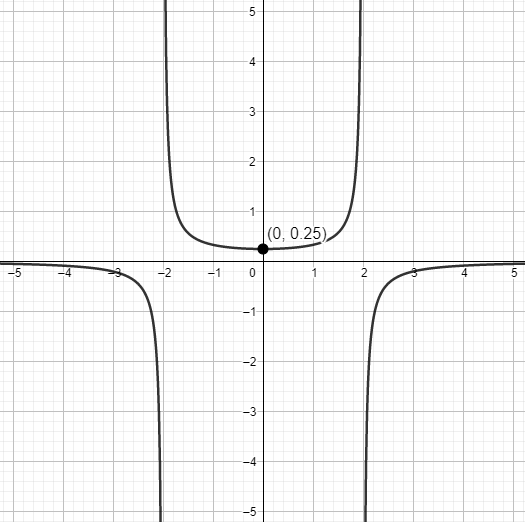
corresponde a un PVI de $\dfrac{dy}{dx} = 2xy^{2}$ con la condición inicial $y(0) = \dfrac{1}{4}$. En la entrada anterior mostramos la gráfica de esta función.
Gráfica de la función $y(x) = \dfrac{1}{4 -x^{2}}$.
Pero ahora el intervalo de solución debe ser aquel en el que $x_{0} = 0 \in \delta$. El intervalo más grande que puede tomar la solución particular es $\delta = (-2, 2)$, pues es el intervalo donde está el punto $x_{0} = 0$ y donde la solución es continua. ¡La condición inicial ha restringido el intervalo de solución!
Punto que satisface la condición inicial $y(0) = \dfrac{1}{4}$.
$\square$
Con este ejemplo vemos que las condiciones iniciales establecen un intervalo de solución especifico, en ocasiones (como en el primer ejemplo visto en esta entrada) no habrá mayor problema con el intervalo si la función es derivable y por tanto continua es todo su dominio. Es recomendable primero determinar en donde la solución está definida (encontrar su dominio) y posteriormente revisar si se trata sólo de una solución general o si hay condiciones iniciales que determinarán una solución particular.
Existencia de una solución única
Al trabajar con problemas con valores iniciales debemos hacernos dos preguntas importantes. ¿Existe la solución del problema? y si existe la solución, ¿es única?. Más adelante estudiaremos las ecuaciones diferenciales de primer orden y retomaremos con mayor profundidad este tema, por ahora sólo vamos a enunciar un teorema que da las condiciones suficientes para garantizar la existencia y unicidad de una solución de un PVI de primer orden.
Teorema: Dada una ecuación diferencial de primer orden $$\dfrac{dy}{dx} = f(x, y) \label{3} \tag{3}$$ donde $f(x, y)$ está definida en una región rectangular $U$ en el plano $XY$, la región está definida por $a \leq x \leq b$, $c \leq y \leq d$ y contiene al punto $(x_{0}, y_{0})$ en su interior. Si $f(x, y)$ satisface las condiciones:
$f(x, y)$ es continua en $U$ y
$\dfrac{\partial f}{\partial y}$ es continua en $U$
Entonces existe algún intervalo $\delta_{0}: (x_{0} -h, x_{0} + h)$, $h > 0$, contenido en $[a, b]$, y una función única $y(x)$, definida en $\delta_{0}$, que satisface la condición inicial $y(x_{0}) = y_{0}$.
Dicho de otra manera, las condiciones para la existencia de soluciones son:
Continuidad de $f(x, y)$ en $U$.
Acotamiento de $f(x, y)$ por $U$.
Y las condiciones para la unicidad son:
Continuidad de $f(x, y)$ y $\dfrac{\partial f}{\partial y}$ en $U$.
Acotamiento de $f(x, y)$ y $\dfrac{\partial f}{\partial y}$ por $U$.
Estas condiciones son suficientes, pero no necesarias, puede existir una solución única que satisface $y(x_{0}) = y_{0}$, pero que no cumple con alguna de las condiciones anteriores o que no cumple con ninguna.
Problemas que se modelan con ecuaciones diferenciales
Las matemáticas permiten modelar muchos de los fenómenos que ocurren en en mundo real, a esta descripción matemática de un sistema de fenómenos se le denomina modelo matemático y se construyen con la intención de representar algunas características del fenómeno para después hacer predicciones. Es cierto que esto puede ser un proceso muy difícil ya que implica que las hipótesis que hagamos deben ser descritas en fórmulas muy precisas que nos permitan predecir lo que ocurrirá. Una vez construido un modelo, las predicciones se deben comparar con los datos del sistema, dependerá de la compatibilidad entre las hipótesis y las predicciones lo que defina si debemos confiar en el modelo o debemos mejorar nuestras suposiciones.
En el caso de las ecuaciones diferenciales, éstas nos permiten modelar sistemas que evolucionan con el tiempo o sistemas que implican una razón de cambio de una o más variables. En este curso consideraremos a un modelo matemático como una ecuación diferencial o un sistema de ecuaciones diferenciales que describen el comportamiento de un fenómeno que estemos estudiando. Una vez que hemos formulado un modelo matemático surge el reto de resolver las ecuaciones diferenciales para saber si la solución es consistente con los hechos conocidos acerca del comportamiento del sistema y si no lo es debemos repetir un proceso de modelado en el que vamos ajustando las hipótesis, identificamos nuevas variables o incluso incluimos leyes empíricas que se puedan aplicar al sistema.
Hasta ahora ya hemos estudiado algunas ecuaciones diferenciales, sabemos cómo verificar cuando una función es solución y hemos estudiado algunas de sus propiedades. Para concluir esta entrada vamos a analizar algunos problemas del mundo real que son modelados con ecuaciones diferenciales. En esta parte nos enfocaremos en la forma en la que surgen las ecuaciones dado un problema y no nos preocuparemos por resolverlas, pues esto es algo que aún desconocemos.
Propagación de una enfermedad contagiosa
Recientemente hemos tenido la experiencia de observar cómo es que una enfermedad contagiosa se puede propagar en la población. En términos muy generales intentemos modelar la propagación de una enfermedad contagiosa a través de una comunidad de personas que han estado en contacto con personas enfermas.
Definamos a $x(t)$ como el número de personas que están enfermos en un cierto tiempo $t$ y sea $y(t)$ el número de personas que aún no han sido expuestas al contagio en ese momento $t$. Es claro que la razón $\dfrac{dx}{dt}$ con la que se propaga la enfermedad debe ser proporcional al número de encuentros o interacciones entre los dos grupos de personas. Si suponemos que el número de interacciones es conjuntamente proporcional a $x(t)$ y $y(t)$, entonces un modelo puede ser
$$\dfrac{dx}{dt} = cxy \label{4} \tag{4}$$
donde $c$ es la constante de proporcionalidad. Consideremos una comunidad con una población fija de $n$ personas, si inicialmente nadie tiene la enfermedad entonces $y = n$, pero si a esa comunidad llega una persona enferma $x = 1$, entonces podemos construir la siguiente relación.
Esta última ecuación sería el modelo que describe la propagación de la enfermedad a través del tiempo. Una condición inicial sería que en el momento en el que llego la persona enferma a la comunidad comenzó a propagarse la enfermedad, esto es, $x(0) = 1$.
$\square$
Ley de enfriamiento de Newton
La ley de enfriamiento de Newton establece que la razón de cambio de la temperatura $T(t)$ de un cuerpo con respecto al tiempo $t$ es proporcional a la diferencia entre la temperatura del cuerpo $T(t)$ y la temperatura del medio ambiente $T_{m}$. Esta ley puede ser modelada con la siguiente ecuación diferencial.
donde $k > 0$ es la contante de proporcionalidad y $T_{m}$ es la temperatura del medio ambiente considerada también una constante. Si podemos resolver esta ecuación encontraríamos una función que podría predecir la temperatura del cuerpo en cualquier tiempo $t$.
Sin embargo, sin resolver la ecuación podemos notar que si $T > T_{m}$, entonces $\dfrac{dT}{dt} < 0$, lo que significa que el cuerpo se estaría enfriando, pues la función $T(t)$ sería una función decreciente mientras avanza el tiempo. Por otro lado, si $T < T_{m}$, entonces $\dfrac{dT}{dt} > 0$, es decir la función $T(t)$ sería una función creciente en el tiempo lo que físicamente significa que el cuerpo se esta calentando.
$\square$
Cuerpos en caída
Consideremos un objeto que es lanzado desde lo alto de un edificio, el problema que queremos analizar es hallar la forma de conocer la posición del objeto con respecto al suelo en algún tiempo $t$ después de ser lanzado y antes de tocar el suelo. Por convención consideremos que la dirección hacía arriba es positiva.
Analicemos la situación. Consideremos un edificio de altura $r_{0}$, desde esa altura se lanza un objeto de masa $m$, la velocidad inicial con la que es lanzado es $v_{0}$. El objeto al caer esta sometido a la fuerza de gravedad, la segunda ley de Newton nos dice que cuando la fuerza neta $F$ que actúa sobre un cuerpo no es cero, entonces la fuerza neta es proporcional a su aceleración $a$, estas cantidades están relacionadas por la ecuación
$$F = ma \label{8} \tag{8}$$
con $m$ la masa del cuerpo, si el objeto esta en caída la fuerza neta será su peso.
$$F = -W \label{9} \tag{9}$$
El signo menos es porque el peso del objeto es una fuerza dirigida hacia abajo. Recordando que el peso está dado como
$$W = mg \label{10} \tag{10}$$
donde $m$ es la masa del objeto y $g$ es la aceleración debido a la gravedad de la tierra, usando entonces la segunda ley de Newton podemos establecer que
$$F = ma = -mg = -W$$
es decir $a = -g$. Recordemos que la aceleración de un objeto corresponde a la tasa de cambio de la velocidad y que a su vez la velocidad es la tasa de cambio de la posición del objeto, es decir, la aceleración es la segunda derivada de la posición con respecto al tiempo, si $r(t)$ es la posición del objeto, entonces
Las condiciones iniciales son claras, al tiempo $t = 0$ el objeto se encuentra en la posición mas alta del edificio es decir $r(0) = r_{0}$ y la velocidad con la que es lanzada al tiempo $t = 0$ es $v(0) = \dot{r}(0) = v_{0}$. Resolviendo la ecuación diferencial y obteniendo la solución particular podremos predecir la posición del objeto con respecto al suelo a cualquier tiempo $t$ antes de caer por completo.
$\square$
Modelo logístico de la población
Este es uno de los modelos más estudiados y representativos al estudiar ecuaciones diferenciales. Lo que se quiere estudiar es el crecimiento de una población, queremos crear un modelo que prediga el crecimiento que puede haber en una población en función de su entorno y los recursos limitados a los que están sujetos. Para comenzar con este estudio se pueden considerar las siguientes hipótesis.
Si la población es pequeña, la tasa de crecimiento de la población es proporcional a su tamaño.
Si la población es demasiado grande para ser soportada por su entorno y recursos, la población disminuirá, en este caso la tasa de crecimiento será negativa.
Las variables involucradas en este problema son las siguientes:
Por supuesto el tiempo $t$ es la variable independiente en la que queremos predecir. Otra variable es la población $P$, esta variable es dependiente del tiempo $P = P(t)$, $k$ será el parámetro que corresponde a la razón de crecimiento en el caso de poblaciones pequeñas y $N$ será otro parámetro que establece cuando la población comienza a ser demasiado grande. El parámetro $N$ se conoce como capacidad de soporte del entorno. De acuerdo a las hipótesis anteriores, estamos suponiendo que $P(t)$ crece si $P(t) < N$ y decrece si $P(t) > N$. Ahora que conocemos las variables que estarán presente en el modelo, matemáticamente podemos escribir a las hipótesis como:
$\dfrac{dP}{dt} = kP$ $\hspace{0.5cm}$ si $P$ es pequeña.
$\dfrac{dP}{dt} < 0$ $\hspace{0.8cm}$ si $P$ es grande, tal que $P > N$
Queremos una expresión (ecuación diferencial) que involucre ambas hipótesis. Supongamos que la ecuación que buscamos es de la forma
$$\dfrac{dP}{dt} = k \alpha P \label{13} \tag{13}$$
Donde $\alpha$ es una función que debe acoplarse a las hipótesis. Para que satisfaga la primea hipótesis debe ocurrir que $\alpha$ sea cercano a $1$ cuando $P$ es pequeño y que $\alpha < 0$ cuando $P > N$. La expresión más simple que satisface esto es
$$\alpha = 1 -\dfrac{P}{N} \label{14} \tag{14}$$
Podemos notar que si $P = 0$, entonces $\alpha = 1$ y si $P > N$, entonces $\alpha < 0$. Por lo tanto, la ecuación diferencial que describe esta situación es:
$$\dfrac{dP}{dt} = k \left(1 -\dfrac{P}{N}\right) P \label{15} \tag{15}$$
Éste es el modelo logístico de la población con velocidad de crecimiento $k$ y capacidad de soporte $N$. Como podemos notar es una ecuación diferencial no lineal y su solución la analizáremos con detalle más adelante en el curso.
$\square$
Sistemas Depredador – Presa
Para concluir estudiemos otro de los modelos más estudiados en ecuaciones diferenciales, el modelo depredador – presa. En el mundo ninguna especie vive aislada y sus interacciones pueden proporcionar algunos de los modelos más interesantes por estudiar. El problema que analizaremos es en el que una especie se come a otra, con fines ilustrativos consideremos a la especie depredador como zorros y a la especie presa como conejos. Llamemos $Z(t)$ a la variable dependiente que describe el número de zorros que hay en una cierta región y sea $C(t)$ otra variable dependiente que describe el número de conejos que hay en esa misma región, ambas funciones son dependientes del tiempo $t$. Nuestras hipótesis tienen que ser tales que describan el aumento o disminución de ambas poblaciones de acuerdo a las interacciones que hay entre zorros y conejos, es claro que si hay muchos conejos los zorros tendrán alimento y su población crecerá, mientras que la de conejos disminuirá y por otro lado, si hay pocos conejos la población de zorros disminuirá (morirán por falta de alimento), mientras que la de conejos aumentará. Las hipótesis que consideraremos son las siguientes:
Si no hay zorros presentes, los conejos se reproducen a una tasa proporcional a su población y no les afecta la sobrepoblación.
Los zorros se comen a los conejos y la razón a la que los conejos son devorados es proporcional a la tasa a la que los zorros y conejos interactúan.
Sin conejos que comer, la población de zorros disminuirá a una tasa proporcional a ella misma.
La tasa de nacimientos de los zorros crece en proporción al número de conejos comidos por zorros que, por la segunda hipótesis, es proporcional a la tasa a la que los zorros y conejos interactúan.
Las variables que tenemos hasta ahora son el tiempo $t$ y las poblaciones $Z(t)$ y $C(t)$, para satisfacer las hipótesis necesitamos de parámetros que las modelen. Los parámetros que consideraremos son los siguientes:
$a$ es el coeficiente de la tasa de crecimiento de conejos.
$b$ es la constante de proporcionalidad que mide el número de interacciones conejos-zorros en las que el conejo es devorado.
$c$ es el coeficiente de la tasa de muertes de zorros.
$d$ es la constante de proporcionalidad que mide el beneficio a la población de zorros de un conejo devorado.
Tomaremos la convención de que todos estos parámetros son positivos. En este caso particular tenemos dos variables dependientes del tiempo por lo tanto será necesario encontrar dos ecuaciones que modelen al sistema. Para que sea más intuitivo entender el modelo vamos a mostrar las ecuaciones que modelan el sistema y veamos por qué son así.
La primer hipótesis nos habla de una relación proporcional en el crecimiento de la población de conejos cuando no hay zorros presentes, de ahí el término $aC$ de la primer ecuación, lo mismo ocurre con la tercera hipótesis, pero en este caso se trata de un decremento de población de zorros tras la falta de conejos, por ello el signo menos en el término $-cZ$ de la segunda ecuación. Por otro lado, la segunda y cuarta hipótesis nos habla de una interacción entre los zorros y los conejos, esta interacción puede ser modelada con el producto $CZ$, con este producto hacemos que la interacción aumente si $C$ o $Z$ aumentan, pero desaparece si $C = 0$ o $Z = 0$, así en el caso de la segunda hipótesis los conejos son devorados de manera proporcional a la interacción entre zorros y conejos, por ello agregamos el término $-bCZ$ en la primer ecuación, el signo menos indica que el número de conejos debe disminuir, pues están siendo devorados, así mismo, la cuarta hipótesis nos habla de un crecimiento en el número de zorros al comer conejos, esta interacción es modelada con el término $dCZ$, en este caso es positivo ya que los zorros están aumentando en número. Este análisis es lo que le da sentido al modelo (\ref{16}) que hemos creado.
Algo interesante que notamos es que ahora tenemos dos ecuaciones diferenciales que modelan el fenómeno. Cuando hay dos o más ecuaciones diferenciales decimos que es un sistema de ecuaciones diferenciales, en este caso este sistema de ecuaciones lo llamamos sistema de primer orden de ecuaciones diferenciales ordinarias, se dice también que el sistema es acoplado porque las tasas de cambio $\dfrac{dC}{dt}$ y $\dfrac{dZ}{dt}$ dependen tanto de $C$ como de $Z$. Los sistemas de ecuaciones diferenciales será un tema que estudiaremos en la tercera unidad del curso.
Una solución al modelo que hemos construido consiste en encontrar un par de funciones $C(t)$ y $Z(t)$ que describan las poblaciones de conejos y zorros como funciones del tiempo. Como el sistema es acoplado, no podemos determinar cada una de esas funciones de forma aislada, sino que debemos resolver ambas ecuaciones diferenciales de forma simultánea, sin embargo en este caso no es posible determinar de modo explícito formulas para $C(t)$ y $Z(t)$, no pueden ser expresadas en términos de funciones conocidas tales como polinomios, senos, cosenos, exponenciales, etcétera. Más adelante veremos que las funciones $C(t)$ y $Z(t)$ existen, pero entonces, ¿cómo conocerlas?. En la siguiente entrada estudiaremos un método cualitativo de las ecuaciones diferenciales que puede ser un método que nos ayude en estos casos, por ejemplo.
$\square$
Por supuesto estos son sólo algunos problemas ilustrativos en los que las ecuaciones diferenciales modelan algún fenómeno natural, pero la cantidad de fenómenos que involucran ecuaciones diferenciales son enormes y un tanto el objetivo es que conforme vayamos aprendiendo seamos capaces de construir nuestros propios modelos sobre algún fenómeno que observemos a nuestro alrededor.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Dada la ecuación diferencial y su solución general, verificar que la función $y(x)$ es solución, determinar la solución particular dadas las condiciones iniciales y determinar el intervalo de solución $\delta$ en donde puede estar definida dicha solución.
ha sido propuesto como un modelo para un sistema depredador – presa de dos especies particulares de microorganismos (con $a$, $b$ y $c$ parámetros positivos).
¿Qué variable, $x(t)$ o $y(t)$, representa a la población depredadora? y ¿qué variable representa a la población presa?.
¿Qué le pasa a la población depredadora si la presa se extingue?.
Más adelante…
Más adelante aprenderemos a resolver ecuaciones diferenciales ordinarias de primer orden de forma analítica, una vez que estemos listos puede ser conveniente regresar a esta entrada e intentar resolver las ecuaciones diferenciales que modelan cada uno de los problemas vistos para extrapolar en los resultados.
Pero antes de estudiar métodos analíticos estudiaremos un método geométrico o mejor conocido como método cualitativo de las ecuaciones diferenciales que nos permitirá describir las soluciones sin conocer explícitamente la forma analítica de las funciones solución.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»