Introducción
La forma en que los gobiernos de muchos países, para poder llevar a cabo mejores y proyectos de mantenimiento a carreteras, obras, realizar proyectos de modernización, abastecimiento de agua, luz, servicios en general, entre otras muchas cosas, recurren a fuentes de financiamiento para hacerlo. La forma en que funciona este tipo de financiamiento es el tema que se abordará en ésta sección.
Conceptos generales del mercado de valores
La mayoría de los gobiernos de cualquier país, necesitan un financiamiento para llevar a cabo el mantenimiento de toda la infraestructura que posee la sociedad, los recursos los adquieren por medio del cobro de los impuestos a los ciudadanos, y a las empresas que operan en cada región, sin embargo, hay ocasiones en que dichos recursos no son suficientes.
Un caso semejante les ocurre a las empresas, cuando tienen considerado expandirse con otras sucursales, o pretenden modernizar su maquinaria, su parque vehicular, etc. Para llevarlo a cabo las empresas pueden acudir a un banco para justamente adquirir créditos, sin embargo, al igual como le pasa al gobierno hay ocasiones en que dichas instituciones financieras no son suficientes.
En ambos casos, cuando las empresas ó el gobierno, se quieren hacer de algún crédito aparecen las variables que durante todo este tiempo se han estado manejando, capital, tasa de interés, temporalidad o duración del crédito, monto y la forma en que va a ser pagado. Todas esas variables y condiciones mediante los cuales se pactan la forma en que se pagará un crédito aparecen debidamente descritas en un contrato, el cual es firmado por ambas partes involucradas.
Retomando el problema de financiamiento que tienen las empresas, para solucionarlo, pueden recurrir también a la venta de acciones (cada una de las acciones es equivalente a una pequeña parte de la empresa), invitando a inversionistas a ser parte de la empresa comprando una pequeña parte de ésta. Dichas acciones pueden otorgar intereses, los cuales son llamados dividendos, sobre una cierta inversión. Estos dividendos pueden ser pagos fijos o variables.
Los socios de la empresa son los que determinan, al momento de crear la empresa, el valor del capital social de la misma, el cual queda determinado por las aportaciones de cada uno de los socios y por el valor del número de las acciones que representan dicho capital. El valor de dichas acciones se irá modificando a través del tiempo, pueden incrementar, disminuir o mantener su valor, dependiendo del crecimiento de la empresa, sus ganancias, entre otros factores. El tema de cómo se comportan las acciones es bastante interesante y amplio, no obstante, no es el objeto principal de estudio del presente material. Sin embargo, era necesario, hacer mención de sus generalidades para tener una idea más concreta de su funcionamiento y ubicar la importancia de éste tema dentro de las matemáticas financieras y sobre todo por la importancia que tienen como una alternativa de fuente de financiamiento.
Este tema aborda los conceptos de acciones, bonos de la tesorería, pagares y otros documentos de deuda, son ejemplos de formas de tener un financiamiento y son mejor conocidos como valores. El lugar donde se puede comerciar dichos documentos, se llama Bolsa mexicana de valores, y es en ella donde a través de casas de bolsa (instituciones autorizadas por el gobierno para servir de intermediarios entre las empresas, los inversionistas o instituciones de gobierno, que estén interesadas en comprar o vender dichos valores.
El mercado de valores, está compuesto por empresas privadas, instituciones gubernamentales, inversionistas, así como las diferentes operaciones de compra-venta que llevan a cabo en la bolsa.
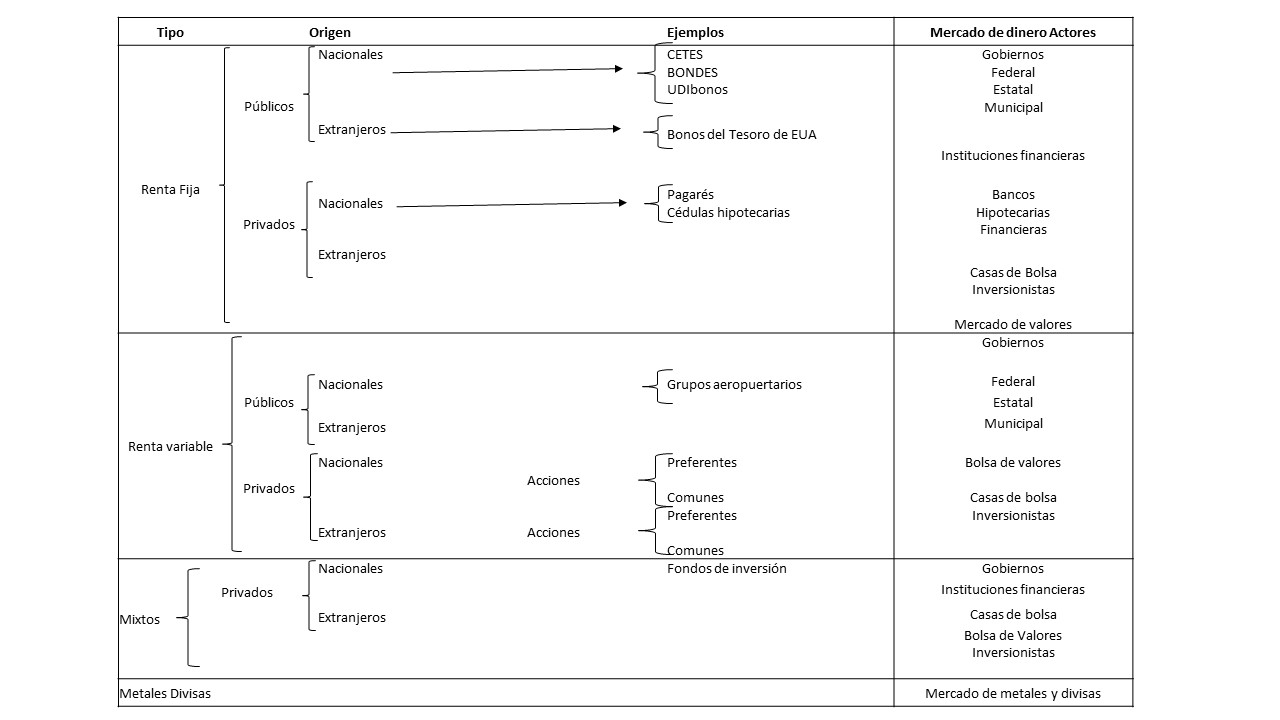
-«Los valores pueden ser clasificados como nacionales o extranjeros, públicos o privados, y de renta fija o de renta variable»- (Cánovas. T.)
Los valores de renta fija, son todos aquellos que se encuentran libres de riesgo, de cierta forma está garantizado el pago de los intereses convenidos, y regularmente son emitidos por el gobierno, sin embargo, también se puede encontrar éste tipo de valores por parte de empresas privadas. Este tipo de valores se diferencias de las acciones, porque éstas no garantizan algún rendimiento exacto, como puede subir su precio, puede bajar o puede ser igual al que se compró al momento de adquirirlo. Ejemplo de este tipo de valores son los que emiten el gobierno en sus diferentes órdenes (Federal, Estatal o municipal), certificados de la tesorería (CETES), Bonos de desarrollos, los UDIbonos (su valor queda determinado por las UDIS, el cual se ajusta dependiendo de la inflación), por parte de los bancos aparecen pagarés con interés liquidable al vencimiento, el papel cédulas hipotecarias, entre otros.
Existen también los dividendos, que son un tipo de acciones que ofrecen garantizar el pago de un interés mínimo.
Una de las aplicaciones de los temas que se han estado trabajando durante todo este tiempo, se da cuando hay un reparto de dividendos que como se mencionó es el pago de los intereses generados de una inversión, y éstos los pagan al término de un año fiscal que pueden ser pagaderos p veces al año, una expresión con la que ya se ha estado trabajando con bastante frecuencia. Cabe hacer mención que el pago de los dividendos también suele cambiarse por la adquisición de más acciones de la empresa.
Otro dato importante que es necesario mencionar es el mercado de dinero el cual se conforma por las casas de bolsa, los inversionistas y las instituciones financieras, así como la actividad de compra-venta de valores de renta fija.
También existen los fondos de inversión de renta variable, este tipo de valores pueden ofrecer rendimientos muy altos, pero de igual forma pueden representar pérdidas igual de grandes, es por ésta razón que la mayoría de veces que se hacen uso de éste tipo de valores lo realizan en combinación con los de renta fija, para de alguna forma disminuir el riesgo que implica ésta práctica.
A continuación, se muestra un Cuadro que resume los diferentes tipos de valores, la forma en que opera y qué entidad es la que los emite.
Más adelante…
Este tema solo se trató de abordar los conceptos más generales que aparecen en el mercado de valores, para estar en contexto de cómo se manejan de forma general dichos conceptos, sin embargo; es necesario mencionar que fueron descritos ya que se abordará el tema de valuación de valores de renta fija, para lo cual se hará uso de todas las herramientas de matemáticas financieras que hasta el momento se han dado a conocer.
- Matemáticas Financieras
- Entrada anterior
- Entrada siguiente