En la entrada anterior hablamos del algoritmo de la división. Dados dos números enteros $a$ y $b$, con $b\neq 0$, nos permite poner de manera única a $a$ de la forma $a=qb+r$, en donde $q$ y $r$ son enteros, y además $0\leq r < |b|$. En otras palabras, nos permite poner a un número como «copias de otro», más un residuo «chiquito». En esta entrada hablaremos de la divisibilidad en los enteros.
La divisibilidad se da cuando pasa una situación especial en el algoritmo de la división: cuando el residuo obtenido es igual a cero. Es decir, cuando podemos escribir $a=qb$. Cuando esto sucede, diremos que $b$ divide a $a$, o bien que $a$ es múltiplo de $b$. En esta entrada daremos una definición formal que contemple este caso y estudiaremos varias de sus propiedades.
Definición de divisibilidad
La noción fundamental que estudiaremos en esta entrada es la de divisibilidad. La definición crucial es la siguiente.
Definición. Sean $m$ y $n$ enteros. Diremos que $m$ divide a $n$ si existe un entero $k$ tal que $n=km$. En notación, escribiremos $m|n$. También diremos que $n$ es un múltiplo de $m$, o bien que $n$ es divisible entre $m$.
Ejemplo. El número $35$ es divisible entre $5$ pues podemos encontrar un entero $k$ tal que $35=k\cdot 5$. Concretamente, podemos escribir $35=7\cdot 5$. Así mismo, este número también es divisible entre $-7$ pues podemos encontrar un entero $k$ tal que $35=k\cdot (-7)$, en concreto, podemos escribir $35=(-5)(-7)$.
Por otro lado, el $35$ no es múltiplo de $8$. ¿Cómo sabemos esto? Al hacer el algoritmo de la división obtenemos que $35=4\cdot 8 + 3$. Como esta es la única forma de escribir a $35$ como un múltiplo de $8$ más un residuo entre $0$ y $7$, entonces es imposible escribirlo como un múltiplo de $8$ más residuo $0$. En otras palabras, no es múltiplo de $8$.
$\triangle$
Propiedades básicas de divisibilidad
La siguiente proposición habla de algunas de las propiedades básicas de la divisibilidad. Las enunciaremos y daremos sus demostraciones para poner en práctica nuestra definición de divisibilidad.
Proposición. La noción de divisibilidad cumple las siguientes propiedades.
Los enteros $1$ y $-1$ dividen a cualquier otro entero.
El entero $0$ es divisible por cualquier entero.
Es reflexiva, es decir para cualquier entero $n$ se tiene que $n|n$.
Es transitiva, es decir si $l,m,n$ son enteros tales que $l|m$ y $m|n$, entonces $l|n$.
Demostración. A continuación demostramos la demostración, inciso por inciso.
Recordemos que si $n$ es un entero, entonces $n=n\cdot 1$. Esto nos dice que $1$ divide a $n$. Además, por las propiedades de las operaciones en los números enteros tenemos lo siguiente: \begin{align*} n&=n\cdot 1\\ &=n\cdot ((-1)\cdot (-1))\\ &=(n\cdot (-1))\cdot (-1)\\ &=(-n)\cdot (-1). \end{align*} Aquí estamos usando que $(-1)(-1)=1$, la asociatividad del producto en los números enteros y que $(-1)n=-n$. En resumen, obtenemos que $n=(-n)(-1)$, lo cual nos dice que $-1|n$.
Aquí notamos que para cualquier entero $n$ tenemos que $0=0\cdot n$. Así, $n|0$.
Anteriormente usamos que $n=n\cdot 1$ para concluir $1|n$. Así mismo, al usar $n=1\cdot n$ obtenemos que $n|n$.
Veamos la transitividad. Supongamos que $l,m,n$ son enteros tales que $l|m$ y $m|n$. Por definición de divisibilidad podemos encontrar enteros $q$ y $r$ tales que $m=ql$ y $n=rm$. Substituyendo el valor de $m$ de la primera igualdad en la segunda y usando asociatividad obtenemos que: $$n=rm=r(ql)=(rq)l.$$ Esto precisamente nos dice que $l|n$.
$\square$
Divisibilidad y operaciones en los enteros
La divisibilidad se comporta bien con las operaciones en los números enteros. En la siguiente proposición encontramos algunas de las propiedades que vuelven esto un poco más preciso.
Proposición. La noción de divisibilidad cumple las siguientes propiedades.
Para enteros $l,m,n$, si $l|m$ y $l|n$, entonces $l|m+n$.
Para enteros $l,m,n$, si $l|m$, entonces $l|mn$.
Para enteros $l$, $a$, $b$, $c$, $d$ se cumple que si $l|m$ y $l|n$, entonces $l|am+bn$.
Demostración. Daremos la demostración inciso por inciso:
Como $l|m$ y $l|n$, por definición existen enteros $r$ y $s$ tales que $m=rl$ y $n=sl$. Al hacer la suma y usar la distributividad del producto sobre la suma obtenemos que $$m+n=rl+sl=(r+s)l.$$ Esto por definición está diciendo que $l$ divide a $m+n$.
Aquí podemos utilizar una propiedad anterior. Tenemos que $mn=nm$, por lo cual $mn$ es divisible entre $m$. Es decir, tenemos $l|m$ y $m|mn$. Así, por la transitividad de la divisibilidad, que ya probamos anteriormente, tenemos que $l|mn$.
Este inciso es consecuencia de los dos anteriores y, de hecho, ya no tenemos que usar la definición. Por el segundo inciso, como $l|m$, entonces $l|am$. Así mismo, como $l|n$, entonces $l|bn$. Finalmente, por el primer inciso, como $l|am$ y $l|bn$, entonces $l|am+bn$.
$\square$
Observa que si ponemos $a=1$ y $b=-1$ en la última propiedad obtenemos el siguiente corolario: si $l|m$ y $l|n$, entonces $l|m-n$.
Divisibilidad y orden en los enteros
Hay una tercera clase de propiedades que cumple la noción de divisibilidad: aquellas relacionadas con el orden en los enteros. Veamos esto.
Proposición. La noción de divisibilidad cumple las siguientes propiedades.
Si $m$ y $n$ son enteros distintos de cero tales que $m|n$, entonces $|m|\leq |n|$.
Si $m$ y $n$ son enteros positivos tales que $m|n$, entonces $m\leq n$.
Si $m$ y $n$ son enteros tales que $m|n$ y $n|m$, entonces $|m|=|n|$.
Demostración. Demostraremos la primera afirmación a detalle, pues a partir de ella salen las otras dos de manera prácticamente inmediata.
Tomemos dos enteros $m$ y $n$ tales que $m|n$. Por definición de divisibilidad, tenemos que existe un entero $k$ tal que $n=km$. Al tomar valor absoluto de esta expresión, obtenemos que $|n|=|km|$. Por propiedades del valor absoluto, tenemos que $|km|=|k||m|$. Como $n$ es distinto de cero, entonces $k$ también es distinto de cero, así que $|k|\geq 1$. De esta manera, tenemos la siguiente cadena de igualdades y desigualdades: $$|n|=|km|=|k||m|\geq 1\cdot |m| = |m|.$$
Esto es lo que queríamos demostrar.
Para el segundo inciso, como $m$ y $n$ son positivos, entonces entran en el caso del primer inciso. Además, por ser positivos tenemos $|m|=m$ y $|n|=n$. De este modo, por el primer inciso tenemos $m\leq n$.
En el tercer inciso primero tenemos que descartar algunos casos. Si $m=0$, entonces la divisibilidad $0|n$ nos dice que $n=k\cdot 0$ para alguna $k$ entera, pero entonces $n=0$ también, y entonces se cumple $|m|=0=|n|$. El caso $n=0$ es análogo. Ya descartados estos casos, podemos suponer que $m$ y $n$ son distintos de cero. Por el primer inciso tendríamos entonces $|m|\leq |n|$ y $|m|\geq |n|$. Así, $|m|=|n|$, como queríamos.
$\square$
Un ejemplo que usa varias propiedades de divisibilidad
¿Por qué es bueno recordar y saber cuándo usar propiedades de la divisibilidad? Porque nos permite simplificar ciertos problemas y resolverlos más fácilmente. Veamos un ejemplo.
Problema. Encuentra todos los divisores del número $12$.
Solución. Supongamos que $d$ es un divisor de $12$. Tenemos entonces que $|d|\leq |12|=12$, así, $d$ es un número entre $-12$ y $12$. Fuera de este rango no pueden existir divisores de $12$.
Por reflexividad tenemos que $12|12$. Por la propiedad de $1$ y $-1$ tenemos que $1|12$ y $-1|12$. Es fácil ver $12=2\cdot 6$ y $12=3\cdot 4$, así que $2$, $3$, $4$ y $6$ son todos ellos divisores de $12$. Los negativos de estos números también serán divisores entonces pues, por ejemplo, como $12=3\cdot 4$, también tenemos $12=(-3)(-4)$.
De este modo, hasta ahora hemos visto que $-12,-6,-4,-3,-2,-1,1,2,3,4,6,12$ son todos ellos divisores de $12$.
El $5$ claramente no es, pues al hacer el algoritmo de la división obtenemos $12=2\cdot 5 +2$, con residuo $2$. Entonces el $-5$ tampoco puede ser divisor.
Podríamos hacer lo mismo con $7,8,9,10,11$. Pero una forma fácil de ver que ninguno de ellos va a funcionar es que si intentáramos escribir $12=7k$, por ejemplo, se tiene que $k$ no puede ser $1$ (pues $12\neq 7$) y si ponemos $k\geq 2$ entonces el producto es al menos $14$, que ya se pasa de $12$. Así, ni estos números, ni $-7,-8,-9,-10,-11$ son divisores de $12$.
$\triangle$
Más adelante…
La noción de divisibilidad da pie a varios otros conceptos en la teoría de números enteros. Dentro de algunas entradas hablaremos de dos conceptos importantes: el de máximo común divisor y mínimo común múltiplo en los enteros. Sin embargo, antes de hacer esto tomaremos una pequeña desviación para hablar de un concepto un poco abstracto pero bastante útil: los ideales.
Tarea moral
Encuentra todos los divisores del número $24$ (tanto los positivos, como los negativos) y verifica que en efecto cumplen con la definición dada en esta entrada.
Encuentra contraejemplos para las siguientes afirmaciones:
Si $l$, $m$ y $n$ son enteros tales que $l|m$ y $n|m$, entonces $l+n|m$.
Si $l,m,n$ son enteros tales que $l|mn$, entonces o bien $l|m$ o bien $l|n$.
Demuestra las siguientes dos propiedades de la noción de divisibilidad:
Si $m$ y $n$ son enteros positivos tales que $m|n$ y $n|m$, entonces $m=n$.
Si $m$ es divisor de $n$ con $n=km$, entonces $k$ también es divisor de $n$.
Sean $m$ y $n$ enteros. Demuestra que $m$ divide a $n$ si y sólo si $m^2$ divide a $n^2$.
Sea $n$ un entero positivo, $m$ un entero, $a_1,\ldots,a_n$ enteros y $b_1,\ldots,b_n$ enteros. Demuestra que si $m|b_i$ para todo $i=1,\ldots,n$, entonces $m| \sum_{i=1}^n a_ib_i$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Hasta ahora hemos visto que toda función compleja $f(z)$ diferenciable es continua, más aún sabemos que toda función compleja continua es de la forma: \begin{equation*} f(z) = u(x,y) + i v(x,y), \end{equation*} donde $u(x,y)$ y $v(x,y)$ son funciones reales continuas de variables $x,y$, por lo que resulta natural preguntarnos acerca de qué condiciones deben cumplir dichas funciones para que una función compleja $f(z)$ sea analítica. La respuesta a esta pregunta esta dada por las ecuaciones de Cauchy-Riemann, a las cuales nos referiremos simplemente como las ecuaciones de C-R. Dichas ecuaciones aparecieron por primera vez en 1821 en los primeros trabajos del matemático fránces Augustin Louis Cauchy sobre integrales de funciones complejas. Su relación con la existencia de la derivada compleja apareció hasta 1851 en la tesis doctoral del matemático alemán Bernhard Riemann.
Como veremos a lo largo de las siguientes entradas, las ecuaciones de C-R resultan ser un pilar en la teoría de las funciones complejas, por lo que nuestro objetivo será deducirlas y obtener una serie de resultados que nos permitan caracterizar a las funciones analíticas mediante dichas ecuaciones.
Recordemos las siguientes definiciones vistas en nuestros cursos de cálculo.
Definición 17.1. (Derivada parcial.) Supongamos que $u: \mathbb{R}^2 \to \mathbb{R}$ es una función real de variables reales, $x,y$, definida en un conjunto abierto no vacío $U\subset \mathbb{R}^2$. Si consideramos a la variable $y$ como constante, entonces podemos pensar a $u$ como una función únicamente de $x$ y derivar con respecto a $x$. Entonces: \begin{equation*} \frac{\partial u }{\partial x}(x,y) = \lim_{h \to 0} \frac{u(x+h, y) – u(x,y)}{h}. \end{equation*}
En caso de existir dicho límite lo llamaremos la derivada parcial de $u$ con respecto a $x$ y es denotada como $\frac{\partial u }{\partial x}$ o $u_x$. Dicha derivada resulta ser una función evaluada en el punto $(x,y)$, lo cual se suele omitir por simplicidad en la notación.
Análogamente, fijando a $x$ y considerando a $u(x,y)$ como una función de $y$, tenemos al derivar con respecto a $y$ la derivada parcial de $u$ con respecto a $y$, es decir: \begin{equation*} \frac{\partial u }{\partial y}(x,y) = \lim_{h \to 0} \frac{u(x, y+h) – u(x,y)}{h}. \end{equation*}
Definición 17.2. (Funciones clase $C^k$.) Si $U\subset\mathbb{R}^2$ es un conjunto abierto y $u:U\to\mathbb{R}$ es una función, entonces $u$ es llamada de clase $C^1$ o continuamente diferenciable en $U$ si $\partial u/\partial x$ y $\partial u/\partial y$ existen y son continuas en $U$. Lo anterior se denota de forma abreviada como $u\in C^1(U)$.
De forma general si $k\in\mathbb{N}$, entonces una función real $u$ definida en $U\subset\mathbb{R}^2$, es llamada de clase $C^k$ o $k$-veces continuamente diferenciable si todas las derivadas parciales hasta el orden $k$ existen y son continuas en $U$. En dicho caso escribimos $u\in C^k(U)$. En particular, diremos que una función $u$ es clase $C^0$ si simplemente es una función continua.
Entonces, para $U\subset \mathbb{C}$ abierto, una función $f(z) = u(x,y) + i v(x,y)$ definida en $U$, es llamada de clase $C^k$ si $u$ y $v$ son de clase $C^k$.
Observación 17.1. A partir de ahora usaremos la notación $U$ para denotar conjuntos abiertos en $\mathbb{C}$ y $D$ para denotar dominios o regiones en $\mathbb{C}$, estos conceptos se abordaron en la Unidad 1: Introducción y preliminares.
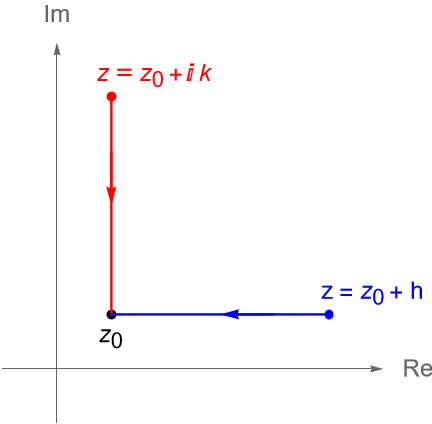
De acuerdo con la observación 16.2 sabemos que si una función $f:U\to\mathbb{C}$ es diferenciable en un punto $z_0\in U$, entonces el límite: \begin{equation*} f'(z_0) = \lim_{z \to z_0} \dfrac{f(z) – f(z_0)}{z-z_0} = \lim_{h \to 0} \dfrac{f(z_0 + h) – f(z_0)}{h}, \end{equation*} existe y es único sin importar como $h$ se aproxime a $0$ en el plano complejo. Sin embargo es importante notar que al igual que en el caso de funciones reales, podemos considerar a dos direcciones privilegiadas cuando $h \to 0$, figura 73, las cuales son:
a lo largo de un eje paralelo al eje real, es decir cuando $h\in \mathbb{R}$,
a lo largo de un eje paralelo al eje imaginario, es decir cuando $h=ki\in\mathbb{C}$, con $k\in\mathbb{R}$, es un número complejo puro.
Figura 73: Gráfica de las dos direcciones privilegiadas por las que $z$ se aproxima a $z_0$ al calcular $f'(z_0)$.
Veamos entonces qué sucede al calcular el límite que define a $f'(z)$ si consideramos las direcciones privilegiadas descritas previamente. Supongamos que $f(z) = u(x,y) + iv(x,y)$ es una función diferenciable en un punto $z_0=x_0+iy_0\in U$, con $U \subset \mathbb{C}$ abierto.
Si $h$ es un número imaginario puro, es decir $h=ik$, con $k$ real, entonces $h\to 0$ si y solo si $k\to 0$, por lo que: \begin{align*} f'(z_0) &= \lim_{h \to 0} \frac{f(z_0+h) – f(z_0)}{h}\\ & = \lim_{k \to 0} \left[ \frac{u(x_0,y_0+k) – u(x_0,y_0)}{ik} + i \frac{v(x_0,y_0+k) – v(x_0,y_0)}{ik}\right]\\ & = \frac{1}{i}\lim_{k \to 0} \frac{u(x_0,y_0+k) – u(x_0,y_0)}{k} + \lim_{k \to 0} \frac{v(x_0,y_0+k) – v(x_0,y_0)}{k}\\ & = -i \frac{\partial u}{ \partial y}(x_0,y_0) + \frac{\partial v}{ \partial y}(x_0,y_0)\\ & =: -i\frac{\partial f}{\partial y}(x_0,y_0) = -i f_y(z_0). \tag{17.2} \end{align*}
De ambos casos es claro que la existencia de las cuatro derivadas parciales: \begin{equation*} \frac{\partial u}{\partial x}, \quad \frac{\partial u}{\partial y}, \quad \frac{\partial v}{\partial x}, \quad \frac{\partial v}{\partial y} \end{equation*} en el punto $(x_0,y_0)$, está garantizada por la existencia del límite que define a la derivada compleja en el punto $z_0 = x_0 +iy_0 \in U$.
Observación 17.1. Hemos introducido en las últimas igualdades de las ecuaciones (17.1) y (17.2) una notación usual en algunos textos para referirnos a la derivada de una función compleja en términos de las derivadas parciales de las funciones $u$ y $v$, es importante no confundirnos con dicha notación la cual se usará de manera indistinta en el curso.
Dado que $f'(z_0)$ existe sin importar la dirección en que $h$ se aproxime a $0$, entonces los dos límites dados en (17.1) y (17.2) deben ser iguales, es decir: \begin{equation*} f'(z_0) = \frac{\partial u}{ \partial x}(x_0,y_0) + i \frac{\partial v}{ \partial x}(x_0,y_0) = \frac{\partial v}{ \partial y}(x_0,y_0) -i \frac{\partial u}{ \partial y}(x_0,y_0), \tag{17.3} \end{equation*} o equivalentemente: \begin{equation*} f'(z_0) = f_x(z_0) = -i f_y(z_0). \tag{17.4} \end{equation*}
Igualando las partes reales e imaginarias de estos dos números complejos tenemos que: \begin{equation*} \frac{\partial u}{ \partial x} (x_0, y_0)= \frac{\partial v}{ \partial y}(x_0, y_0), \quad \text{y} \quad \frac{\partial u}{ \partial y}(x_0, y_0) = – \frac{\partial v}{ \partial x}(x_0, y_0). \tag{17.5} \end{equation*}
Al par de ecuaciones diferenciales parciales dado en (17.5) se les conoce como las ecuaciones de Cauchy-Riemann.
Con lo anterior hemos probado el siguiente resultado.
Teorema 17.1. (Ecuaciones de Cauchy-Riemann.) Sean $U\subset \mathbb{C}$ un conjunto abierto y $f:U\to \mathbb{C}$ una función. Si $f(z) = u(x,y) + iv(x,y)$ es analítica en un punto $z_0=x_0 +iy_0\in U$, entonces existen las derivadas parciales: \begin{equation*} \frac{\partial u}{\partial x}, \quad \frac{\partial u}{\partial y}, \quad \frac{\partial v}{\partial x}, \quad \frac{\partial v}{\partial y} \end{equation*} en $(x_0,y_0)$ y satisfacen las ecuaciones de Cauchy-Riemann (17.5) en dicho punto. En tal caso se tiene que: \begin{equation*} f'(z_0) = \frac{\partial u}{\partial x}(x_0,y_0) + i \frac{\partial v}{\partial x}(x_0,y_0) = \frac{\partial v}{\partial y}(x_0,y_0) – i \frac{\partial u}{\partial y}(x_0,y_0). \end{equation*}
$\blacksquare$
Corolario 17.1. Si $f(z)=u(x,y) + iv(x,y)$ es una función analítica en un conjunto abierto $U\subset\mathbb{C}$, entonces las ecuaciones de C-R se satisfacen en todo punto de $U$.
$\blacksquare$
De acuerdo con el corolario 16.1 de la entrada anterior, sabemos que todo polinomio complejo es una función entera, es decir, analítica en todo $\mathbb{C}$, por lo que de acuerdo con el corolario 17.1 se deben cumplir las ecuaciones de C-R para todo $z=x+iy\in\mathbb{C}$.
Ejemplo 17.1 Consideremos al polinomio complejo $f(z) = 2z^2 + 3z$, para $z=x+iy\in\mathbb{C}$, veamos que se satisfacen las ecuaciones de C-R en $\mathbb{C}$ y obtengamos la derivada de $f$.
Entonces para todo $z=x+iy\in\mathbb{C}$ se satisfacen las ecuaciones de C-R: \begin{align*} \frac{\partial u}{\partial x} = 4x + 3 = \frac{\partial v}{\partial y},\\ \frac{\partial u}{\partial y} = -4y = – \frac{\partial v}{\partial x}. \end{align*}
Por otra parte, de acuerdo con el teorema 1 tenemos que la derivada de $f$ es: \begin{equation*} f'(z) = 4x+3 + i4y = 4(x+iy) + 3 = 4z + 3. \end{equation*}
Observación 17.3. El teorema 17.1 establece que una condición necesaria para que una función $f(z)=u(x,y)+i v(x,y)$ sea analítica en un punto $z_0\in U \subset\mathbb{C}$ es que las ecuaciones de C-R se satisfagan en dicho punto.
La importancia del teorema 17.1 y del corolario 17.1 radica en que tenemos ahora un criterio para determinar cuando una función no es analítica por medio de las ecuaciones de C-R. Para mostrar esto consideremos los siguientes ejemplos.
Ejemplo 17.2. De acuerdo con el ejemplo 16.3 de la entrada anterior, sabemos que las funciones $f(z) = \overline{z}$ y $g(z) = \operatorname{Re}(z)$ no son analíticas en ningún punto de $\mathbb{C}$. Utilizando la contrapuesta del corolario 17.1 procedemos a verificar nuestro resultado.
Solución. Es claro que ambas funciones están definidas en todo $\mathbb{C}$. Sea $z=x+iy\in\mathbb{C}$.
a) Para $f(z) = \overline{z} = x – iy$ tenemos que $u(x,y) = x$ y $v(x,y) = -y$, por lo que: \begin{align*} \frac{\partial u}{\partial x} = 1 \quad \text{y} \quad \frac{\partial u}{\partial y} = 0,\\ \frac{\partial v}{\partial x} = 0 \quad \text{y} \quad \frac{\partial v}{\partial y} = -1. \end{align*} Es claro que $\partial u/\partial x \neq \partial v/\partial y$ para todo $z = x+iy \in \mathbb{C}$, por lo que $f$ no es analítica en ningún punto.
b) Por otra parte, para $g(z) = \operatorname{Re}(z) = x$ tenemos que $u(x,y) = x$ y $v(x,y) = 0$, por lo que: \begin{align*} \frac{\partial u}{\partial x} = 1 \quad \text{y} \quad \frac{\partial u}{\partial y} = 0,\\ \frac{\partial v}{\partial x} = 0 \quad \text{y} \quad \frac{\partial v}{\partial y} = 0. \end{align*} Tenemos que $\partial u/\partial x \neq \partial v/\partial y$ y $\partial u/\partial y \neq -\partial v/\partial x$ para todo $z = x+iy \in \mathbb{C}$, por lo que $f$ no es analítica en ningún punto.
Ejemplo 17.3. Sea $z=x+iy\in\mathbb{C}$. Veamos que la función compleja $f(z) = 2x^2 +y +i(y^2-x)$ no es analítica en ningún punto.
Es claro que $\partial u/\partial y = -\partial v/\partial x$ para todo $z=x+iy \in \mathbb{C}$, mientras que la igualdad $\partial u/\partial x = \partial v/\partial y$ se satisface solamente en la recta $y=2x$. Sin embargo, para todo punto $z=x+iy$ sobre dicha recta, no existe un disco abierto alrededor de $z$ en el cual $f$ sea diferenciable, por lo que $f$ no es analítica en ningún punto.
Es importante notar que aunque se satisfagan las ecuaciones de C-R en un punto $z_0= x_0+iy_0\in D$, esto no es suficiente para garantizar la existencia de $f'(z_0)$ en $D$, desde que existen muchas otras direcciones por las que $z$ se aproxima a $z_0$ al calcular el límite que define a $f'(z_0)$. Consideremos el siguiente ejemplo para verificar lo anterior.
Ejemplo 17.4. Sea $z=x+iy$. Veamos que la función: \begin{equation*} f(z)= \left\{\begin{array}{lcc} \dfrac{x^3(1+i) – y^3(1-i)}{x^2+y^2}& \text{si} & z\neq 0, \\ 0 & \text{si} & z = 0, \end{array} \right. \end{equation*} es continua en $z=0$ y que en dicho punto se satisfacen las ecuaciones de C-R, pero $f'(0)$ no existe.
Solución. Sea $f(z)=u(z)+iv(z)$, entonces para $z\neq 0$ tenemos que: \begin{equation*} u(x,y) = \frac{x^3 – y^3}{x^2+y^2}, \quad v(x,y) = \frac{x^3 + y^3}{x^2+y^2}, \end{equation*} con $x\neq 0$ y $y\neq 0$.
Primeramente verifiquemos que $f(z)$ es continua en todo $\mathbb{C}$. Es claro que si $z\neq 0$, entonces las funciones racionales $u(x,y)$ y $v(x,y)$ están bien definidas y son continuas, por lo que en dicho caso $f(z)$ es continua. Probemos ahora que $f(z)$ es continua en $z=0$. Utilizando coordenadas polares tenemos que: \begin{equation*} u(r,\theta) = r\left(\operatorname{cos}^3(\theta) – \operatorname{sen}^3(\theta)\right), \quad v(r,\theta) = r\left(\operatorname{cos}^3(\theta) + \operatorname{sen}^3(\theta)\right). \end{equation*}
Notemos que si $z\to 0$, entonces $r \to 0$, para cualquier argumento $\theta$, por lo que: \begin{equation*} \lim_{r \to 0} u(r,\theta) = \lim_{r \to 0} v(r,\theta) = 0, \end{equation*} entonces: \begin{equation*} \lim_{z \to 0} f(z) = 0 = f(0), \end{equation*} por lo que $f(z)$ es continua en $z=0$ y por tanto es continua en todo $\mathbb{C}$.
Veamos ahora que en $z=0$ las ecuaciones de C-R se satisfacen. Si $z=0$, entonces: \begin{align*} f(0) = 0 \quad & \Longleftrightarrow \quad u(0,0) + iv(0,0) = 0\\ & \Longleftrightarrow \quad u(0,0) = v(0,0) = 0. \end{align*} Por definición tenemos que: \begin{align*} \frac{\partial u}{\partial x} (0,0) & = \lim_{h\to 0}\frac{u(h,0) – u(0,0)}{h}\\ & = \lim_{h\to 0}\frac{h – 0}{h}\\ & = 1. \end{align*} \begin{align*} \frac{\partial u}{\partial y} (0,0) & = \lim_{h\to 0}\frac{u(0,h) – u(0,0)}{h}\\ & = \lim_{h\to 0}\frac{-h – 0}{h}\\ & = -1. \end{align*} Mientras que: \begin{align*} \frac{\partial v}{\partial x} (0,0) & = \lim_{h\to 0}\frac{v(h,0) – v(0,0)}{h}\\ & = \lim_{h\to 0}\frac{h – 0}{h}\\ & = 1. \end{align*} \begin{align*} \frac{\partial v}{\partial y} (0,0) & = \lim_{h\to 0}\frac{v(0,h) – v(0,0)}{h}\\ & = \lim_{h\to 0}\frac{h – 0}{h}\\ & = 1. \end{align*} Entonces, en el origen tenemos que: \begin{equation*} \frac{\partial u}{ \partial x} = \frac{\partial v}{ \partial y}, \quad \frac{\partial v}{ \partial x} = -\frac{\partial u}{ \partial y}, \end{equation*} por lo que en $z=0$ se satisfacen las ecuaciones de C-R. Sin embargo, $f(z)$ no es diferenciable en dicho punto.
Para $z=x+iy$ tenemos que: \begin{align*} f'(0) & = \lim_{z \to 0} \frac{f(z) – f(0)}{z}\\ & = \lim_{z \to 0} \frac{f(z) – 0}{z}\\ & = \lim\limits_{\begin{subarray}{l} x \to 0\\ y \to 0 \end{subarray}} \frac{(x^3 – y^3) + i (x^3 + y^3)}{(x^2+y^2)(x+iy)}. \end{align*} Notemos que si $z$ se aproxima $0$ a lo largo de la recta $y=x$, entonces: \begin{align*} f'(0) & = \lim_{z \to 0} \frac{f(z) – f(0)}{z}\\ & = \lim_{x \to 0} \frac{2ix^3}{2x^3(1+i)}\\ & = \frac{i}{1+i}. \end{align*} Por otra parte, si $z$ se aproxima $0$ a lo largo del eje real $x$, es decir si $y=0$, entonces: \begin{align*} f'(0) & = \lim_{z \to 0} \frac{f(z) – f(0)}{z}\\ & = \lim_{x \to 0} \frac{x^3(1+i)}{x^3}\\ & = 1+i. \end{align*} Dado que estos límites son distintos, entonces $f'(0)$ no existe y por tanto $f(z)$ no es diferenciable en $z=0$.
De acuerdo con la proposición 16.1 de la entrada anterior, sabemos que una consencuencia de la analicidad de una función $f$ en un punto $z_0 \in U\subset\mathbb{C}$, es la continuidad de la función $f$ en dicho punto. Sin embargo, el ejemplo 17.4 muestra que el recíproco de dicha proposición no es cierto, pues la función $f(z)$ de dicho ejemplo es continua en $z_0 = 0$, pero no es analítica en dicho punto.
Observación 17.4. De nuestros cursos de geometría sabemos que al trabajar con coordenadas polares es posible establecer una transformación biunívoca entre las coordenadas polares y las coordenadas cartesianas mediante la transformación: \begin{align*} T: (0,\infty) \times (-\pi,\pi] \to \mathbb{R}^2\setminus\{(0,0)\},\\ T(r,\theta)=(r\operatorname{cos}(\theta), r\operatorname{sen}(\theta)). \end{align*} Por ejemplo, para el conjunto de puntos: \begin{equation*} U^* = \left\{(r,\theta) : 1\leq r \leq 2 \, \, \text{y} \,\, 0\leq \theta \leq \pi/2\right\}, \end{equation*} se tiene que $T(U^*) = U$, con: \begin{equation*} U = \left\{(x,y) : 1/2 \leq x \leq 1 \, \, \text{y} \,\, \sqrt{1-x^2} \leq y \leq \sqrt{3} x \right\}\cup \left\{(x,y) : 1 \leq x \leq 2 \, \, \text{y} \,\, 0 \leq y \leq \sqrt{4-x^2}\right\}. \end{equation*}
De acuerdo con la observación 12.5, al considerar a $z\in\mathbb{C}$, $z\neq 0$, en su forma polar, es posible expresar a una función compleja $f(z)$ en términos de su parte real e imaginaria, las cuales son funciones reales de las variables $r$ y $\theta$, por lo que considerando la transformación anterior, resulta sencillo verificar el siguiente resultado.
Proposición 17.1. (Forma polar de las ecuaciones de C-R.) Sean $U\subset\mathbb{C}\setminus{0}$ un conjunto abierto y $f\in\mathcal{F}(U)$ una función. Si la función $f(z)=u(x,y) + iv(x,y)$ es analítica en $U$, entonces considerando la transformación dada por $x=r\operatorname{cos}(\theta)$, $y=r\operatorname{sen}(\theta)$, para $(r,\theta)\in U^*$ y $U^* \subset (0,\infty)\times(-\pi, \pi]$, se tiene que las ecuaciones de Cauchy-Riemann en su forma polar están dadas por: \begin{equation*} \frac{\partial u}{\partial r} = \frac{1}{r} \frac{\partial v}{\partial \theta} \quad \text{y} \quad \frac{\partial v}{\partial r} = -\frac{1}{r} \frac{\partial u}{\partial \theta}, \tag{17.6} \end{equation*} las cuales existen para cada punto de $U$.
Más aún, en consecuencia con el teorema 1, se tiene que para $z_0 = r_0 \operatorname{cis}(\theta_0) \in U$, un punto donde $f$ es analítica, se cumple que: \begin{align*} f'(z_0) & = \operatorname{cis}(-\theta) \left[ \frac{\partial u}{\partial r} (r_0, \theta_0)+ i \frac{\partial v}{\partial r}(r_0, \theta_0)\right]\\ & = \left[\operatorname{cos}(\theta) – i \operatorname{sen}(\theta) \right]\left[ u_r(r_0, \theta_0)+ i v_r(r_0, \theta_0)\right]. \end{align*}
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 17.5. Consideremos a la función $f(z) = \dfrac{1}{z^2}$. De acuerdo con el corolario 16.1 sabemos que dicha función es analítica en $\mathbb{C}\setminus\{0\}$, por lo que considerando a $z\neq 0$ en coordenadas polares podemos verificar que se cumplen las ecuaciones de C-R en su forma polar para todo $(r,\theta) \in (0,\infty) \times (-\pi,\pi]$ o equivalentemente, por la observación 17.4, para todo $z \in \mathbb{C}\setminus\{0\}$.
Solución. Sea $z=r\operatorname{cis}(\theta) \neq 0$, con $r = |\,z\,|$ y $\theta = \operatorname{Arg} z$. Por la fórmula de De Moivre tenemos que: \begin{align*} f(z) = \frac{1}{z^2} & = \frac{1}{\left[r\operatorname{cis}(\theta)\right]^2}\\ & = \frac{1}{r^2\left[\operatorname{cos}(2\theta) + \operatorname{sen}(2\theta)\right]}\\ & = \frac{\operatorname{cos}(2\theta) – i \operatorname{sen}(2\theta)}{r^2}\\ & = \frac{\operatorname{cos}(2\theta)}{r^2} – i \frac{\operatorname{sen}(2\theta)}{r^2}. \end{align*} Entonces: \begin{align*} u(r,\theta) = \frac{\operatorname{cos}(2\theta)}{r^2},\\ v(r,\theta) = – \frac{\operatorname{sen}(2\theta)}{r^2}. \end{align*} Tenemos que para todo $(r,\theta)\in(0,\infty)\times (-\pi,\pi]$ se cumple que: \begin{align*} \frac{\partial u}{\partial r} = – \frac{2\operatorname{cos}(\theta)}{r^3} = \frac{1}{r} \frac{\partial v}{\partial \theta},\\ \frac{\partial v}{\partial r} = \frac{2\operatorname{sen}(\theta)}{r^3} = -\frac{1}{r} \frac{\partial u}{\partial \theta}. \end{align*} Por lo tanto, para todo $z=r\operatorname{cis}(\theta) \in \mathbb{C}\setminus\{0\}$ se satisfacen las ecuaciones de C-R.
Es claro que utilizando las reglas de derivación vistas en la entrada anterior es posible obtener la derivada de $f$ para todo $z\neq 0$, sin embargo utilizando la proposición 17.1 tenemos que: \begin{align*} f'(z) & = \operatorname{cis}(-\theta) \left[ \frac{\partial u}{\partial r}+ i \frac{\partial v}{\partial r}\right]\\ & = \left[\operatorname{cos}(\theta) – i \operatorname{sen}(\theta) \right]\left[ – \frac{2\operatorname{cos}(\theta)}{r^3} + i \frac{2\operatorname{sen}(\theta)}{r^3}\right]\\ & = – \frac{2}{r^3} \left[ \left( \operatorname{cos}^3(\theta) -3\operatorname{sen}^2(\theta) \operatorname{cos}(\theta)\right) – i \left( 3\operatorname{cos}^2(\theta) \operatorname{sen}(\theta) – \operatorname{sen}^3(\theta) \right)\right]\\ & = – \frac{2}{r^3} \left[ \operatorname{cos}(-3\theta) + i \operatorname{sen}(-3\theta)\right]\\ & = – \frac{2}{r^3 \operatorname{cis}(3\theta)}\\ & = – \frac{2}{\left( r \operatorname{cis}(\theta)\right)^3} = – \frac{2}{z^3}. \end{align*}
Ejemplo 17.6. De acuerdo con el ejemplo 16.5 sabemos que $f_0$, es decir la rama principal de la función multivaluada $F(z)=\sqrt{z}$, es analítica en el dominio $D=\mathbb{C}\setminus(-\infty,0]$. Veamos que se cumplen las ecuaciones de C-R en $D$.
Es claro que para todo $(r,\theta)\in(0,\infty)\times (-\pi,\pi)$ se cumple que: \begin{align*} \frac{\partial u}{\partial r} = \frac{\operatorname{cos}\left(\frac{\theta}{2}\right)}{2\sqrt{r}} = \frac{1}{r} \frac{\partial v}{\partial \theta},\\ \frac{\partial v}{\partial r} = \frac{\operatorname{sen}\left(\frac{\theta}{2}\right)}{2\sqrt{2}} = -\frac{1}{r} \frac{\partial u}{\partial \theta}. \end{align*}
Por lo que para todo $z = r\operatorname{cis}(\theta)\in D$ se cumplen las ecuaciones de C-R.
Tarea moral
Demuestra la proposición 17.1. Hint: Observa que $u(x,y) = u(r\operatorname{cos}(\theta), r\operatorname{sen}(\theta))$ y $v(x,y) = v(r\operatorname{cos}(\theta), r\operatorname{sen}(\theta))$. Dado que la función $f$ es analítica en el abierto $U$, por el corolario 1 se satisfacen las ecuaciones de C-R en $U$, por lo que utilizando la regla de la cadena para funciones reales de dos variables se tiene que: \begin{align*} \frac{\partial u}{\partial r} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial r} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial r}, \quad \frac{\partial u}{\partial \theta} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial \theta} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial \theta},\\ \frac{\partial v}{\partial r} = \frac{\partial v}{\partial x} \frac{\partial x}{\partial r} + \frac{\partial v}{\partial y} \frac{\partial y}{\partial r}, \quad \frac{\partial v}{\partial \theta} = \frac{\partial v}{\partial x} \frac{\partial x}{\partial \theta} + \frac{\partial v}{\partial y} \frac{\partial y}{\partial \theta}. \tag{17.7} \end{align*}
De las ecuaciones dadas en (17.7), resuelve para $u_x$, $u_y$, $v_x$ y $v_y$ y concluye que: \begin{align*} \frac{\partial u}{\partial x} = \frac{\partial u}{\partial r} \operatorname{cos}(\theta) – \frac{\partial u}{\partial \theta} \frac{\operatorname{sen(\theta)}}{r}, \quad \frac{\partial u}{\partial y} = \frac{\partial u}{\partial r} \operatorname{sen}(\theta) + \frac{\partial u}{\partial \theta}\frac{\operatorname{cos(\theta)}}{r},\\ \frac{\partial v}{\partial x} = \frac{\partial v}{\partial r} \operatorname{cos}(\theta) – \frac{\partial v}{\partial \theta} \frac{\operatorname{sen(\theta)}}{r}, \quad \frac{\partial v}{\partial y} = \frac{\partial v}{\partial r} \operatorname{sen}(\theta) + \frac{\partial v}{\partial \theta}\frac{\operatorname{cos(\theta)}}{r}. \end{align*} Suponiendo que el teorema 1 se cumple para la forma polar de las ecuaciones de C-R, utiliza las ecuaciones anteriores para verificar que las ecuaciones de C-R se verifican ahora para las funciones reales $u(x,y)$ y $v(x,y)$. Con esto se verifica que las ecuaciones dadas en (17.6) en efecto son la forma polar de las ecuaciones de C-R.
Prueba que las siguientes funciónes no son analíticas en su dominio. a) $f(z) = |\,z\,|^2$, pero es diferenciable en $z=0$. b) $f(z) = y + ix$, para $z=x+iy\in\mathbb{C}$. c) $f(z) = \overline{z}^2$ para $z=x+iy\in\mathbb{C}$. d) $f(z) = 4z – 6 \overline{z} + 3$ para $z=x+iy\in\mathbb{C}$.
Supón que $f(z) = u(x,y) + iv(x,y)$ es una función analítica en un conjunto abierto $U\subset\mathbb{C}$. Sean $h(z) = \overline{f(z)}$ y $g(z) = v(x,y) + iu(x,y)$ dos funciones complejas definidas en el mismo conjunto $U$, entonces ¿son $h$ y $g$ funciones analíticas en $U$?
Sean $U\subset\mathbb{C}$ un conjunto abierto y $f(z) = u(x,y) + iv(x,y)$ una función analítica en un $U$. Prueba que: a) $f'(z) = u_x(z) – i u_y(z) = v_y(z) + i v_x(z)$. b) $|\,f'(z)\,|^2 = u_x^2 + u_y^2 = v_x^2 + v_y^2$, para todo $z=x+iy\in U$.
Considera la siguiente función: \begin{equation*} f(z)= \left\{\begin{array}{lcc} \dfrac{z^5}{|\,z\,|^4}& \text{si} & z\neq 0, \\ 0 & \text{si} & z = 0. \end{array} \right. \end{equation*} Muestra que en $z=0$ la función $f$ satisface las ecuaciones de C-R, pero $f'(0)$ no existe.
Más adelante…
En esta entrada hemos deducido las ecuaciones de Cauchy-Riemann y probamos que para una función compleja $f(z) = u(x,y) + iv(x,y)$ dichas ecuaciones resultan ser un conjunto de condiciones necesarias que deben satisfacer la parte real y la parte imaginaria, $u$ y $v$ respectivamente, en un punto donde $f(z)$ es analítica. Sin embargo, vimos mediante algunos ejemplos que dichas ecuaciones no son una condición suficiente para garantizar la analicidad de una función en un conjunto abierto $U\subset\mathbb{C}$.
Lo anterior nos motiva a preguntarnos bajo qué condiciones, además de las ecuaciones de C-R, las funciones reales $u$ y $v$ nos permiten garantizar que una función compleja $f(z)$ sea analítica en $U$, lo cual responderemos en la siguiente entrada.
En la entrada pasada revisamos el concepto de cardinalidad de conjuntos finitos. Esto es la forma de «contar» los elementos en un conjunto que sabemos que «termina». Ahora veremos un primer acercamiento a la idea del infinito en el aspecto matemático.
Pensando en número grandes
¿Cuál es el número más grande que se te ocurre? Siempre que pienses en alguno, existe uno más grande, pues con solo sumarle a cualquier número $1$, resulta en uno más grande. Y es que en el caso finito, hablábamos de cómo un conjunto tenía un número definido de elementos. Ahora cuando estemos hablando de infinito, lo primero que se nos vendría a la mente es que no podremos «contar» cuántos elementos hay y acabar, pues siempre habrán más y más elementos. Así haremos el intento por primero definir una forma qué es el infinito.
Definición Diremos que un conjunto es infinito si no es finito, es decir, un conjunto $X$ será infinito si no existe algún $n$ número natural tal que sea biyectivo con $X$.
Para ver un ejemplo de esto, veremos los números naturales.
Proposición. Los números naturales son infinitos.
Demostración. Deberemos mostrar que para cualquier número $n$ y cualquier función $f:\mathbb{N} \rightarrow n$, no será biyectiva. Pero esto es resultado inmediato del principio de las casillas, pues $\{1,2,3,…,n,n+1\}$ es un subconjunto de $\mathbb{N}$ que tiene cardinalidad $|n+1|$ por lo tanto la función restringida solo a este conjunto no es inyectiva, y como este solo es un subconjunto de los números naturales, la función tampoco será inyectiva.
Como esto sucede para cualquier $f$ y cualquier $n$, no existirá una biyección entre $\mathbb{N}$ y algún número natural.
$\square$
Este es un conjunto infinito que es muy intuitivo, pues maneja la idea de que siempre podemos seguir pensando en números nuevos. Pero incluso este conjunto tiene subconjuntos infinitos, por ejemplo los números pares positivos (escrito en ocasiones como $2\mathbb{Z_+}$) y números impares positivos (escrito en ocasiones como $2\mathbb{Z_+}+1$), pues estos también son infinitos. Por ahora no te preocupes por la definición de $\mathbb{Z_+}$, pues simplemente nos estamos refiriendo a los números naturales, solo es convención escribir a los pares e impares en estos términos y en cursos siguientes tendrás más tiempo en ahondar en su significado.
Ahora para empezar a «comparar» los conjuntos infinitos, necesitaremos una definición de cuándo dos conjuntos tienen la misma cardinalidad infinita, y esta la definiremos muy similar a como lo hicimos en el caso finito.
Definición. Sean $X$ y $Y$ dos conjuntos. Diremos que tienen la misma cardinalidad si existe una biyección entre ellos y lo escribiremos como $|X|=|Y|$.
Verás que esa es una de las definiciones que manejamos en la entrada anterior. La única diferencia es que en el caso finito siempre decíamos que eran de cardinalidad $n$. Pero ahora como ya no manejamos el concepto en término de números naturales, por ahora solo lo escribiremos como en la definición.
Proposición $|\mathbb{N}| = |2\mathbb{Z_+}|$
Demostración. Para demostrar que estos dos conjuntos tienen la misma cardinalidad, deberemos de dar una biyección entre ellos. Propongamos la función $f: \mathbb{N} \rightarrow \mathbb{2Z_+}$ dada por $f(n)=2n$.
Es inyectiva pues si $n,m$ son números naturales distintos, alguno de los dos es mayor al otro, digamos que $n = m+k$ donde $k$ es un número natural distinto al cero. Entonces es claro que $f(n) = 2n = 2m+2k$ mientras que $f(m) = 2m$. Como $k$ no es cero, entonces $2m+2k \neq 2m$, por lo tanto es inyectica.
Además es suprayectiva, pues cualquier número par $m$ es de la forma «$2$ multiplicado por otro número». Es decir, $m$ es de la forma $2n$ para algún número $n$. Así, $f(n)=2n = m$.
Por lo tanto, la función es biyectiva.
$\square$
Así, hemos demostrado que «existe» la misma cantidad de número pares positivos que de números. Así que sin importar que nos hayamos «saltado» números, siguen teniendo la misma cantidad de números. De manera similar podemos demostrar que existe la misma cantidad de números impares positivos. Esto es posible considerando la función $f(n) = 2n+1$. Además también podríamos dar una biyección entre números pares e impares con la función $f(n)=n-1$. Es decir, los tres conjuntos comparten cardinalidad.
Otros ejemplos de conjuntos con esta cardinalidad son:
Este aspecto de el infinito llamó mucho la atención de los matemáticos del siglo XX, pero hubo uno en particular que desarrolló la teoría de los conjuntos y de paso formalizó el concepto del infinito y de distintos tamaños de infinitos. Uno de los aspectos que más sorprenden a las personas ajenas a la materia es este hecho, que existan distintos infinitos, y en pocos renglones daremos introducción a uno que ya conoces. Para poder distinguir este tipo de infinitos uno del otro, usó una clase especial de números a los que llamó transfinitos.
El primer número transfinito es el aleph $0$, escrito como $\aleph_0$. Y este representa la cardinalidad de los números naturales, es decir $$ |\mathbb{N}| = \aleph_0.$$ Que es la misma cardinalidad que los números pares, impares, e incluso los números primos.
El segundo número transfinito se define como aleph $1$, y a este lo escribimos como $\aleph_1$, este se define como el transfinito inmediatamente superior a $\aleph_0$. La propiedad de este número transfinito es que es estrictamente mayor a $\aleph_0$, lo que quiere decir que cualquier conjunto con esta cardinalidad no será biyectable con alguno que tenga cardinalidad aleph $0$.
Cuando dos conjuntos tengan distinta cardinalidad, lo escribiremos como $|X| \neq |Y|$ mientras que cuado sepamos que hay una función inyectiva de $X$ a $Y$ lo escribiremos como $|X|\leq |Y|$ mientras que si sabemos que hay una inyección pero no biyección entre los conjuntos lo escribiremos como $|X|<|Y|$. Con esto en mente, lo que se plantea con los alephs, es que $\aleph_0 < \aleph_1$. Sin embargo aún nos falta una herramienta más e hipótesis para pensar en este último.
Para hacerlo, será necesario el siguiente teorema que no probaremos en este curso:
Teorema (de Cantor). Sea $X$ un conjunto, entonces $|X|<|P(X)|$.
Con este teorema es que podemos hacer muchos conjuntos infinitos como por ejemplo la potencia de los naturales, pues $|\mathbb{N}|<|P(\mathbb{N})|$. De hecho al transfinito $|P(\mathbb{N})|$ en las matemáticas se ha propuesto la idea de que si $P(\mathbb{N})$ es el transfinito inmediatamente siguiente de $\aleph_0$, pues cae dentro de un área de las matemáticas en donde la teoría se vuelve inconsistente si se supone que sí pero también es inconsistente si se supone que no, por ahora se trata como una hipótesis el usarla o no usarla para llegar a distintos resultados matemáticos.
Hipótesis del continuo. $\aleph_1 = 2^{\aleph_0}$
Como mencionamos, esto no tiene una prueba y se supone o no según sea el caso de uso. Bajo esa suposición, podríamos considerar a $P(\mathbb{N})$ como un conjunto con cardinalidad $\aleph_1$. Más aún, otros conjuntos que tienen esta cardinalidad bajo esta hipótesis son:
El conjunto generado por puras secuencias de $1$ y $0$, como por ejemplo $00000…..$, $111111….$, $1010101….$, etc. es decir secuencias infinitas de números solo formadas de $0$ y $1$.
El conjunto de todos los números del 0 al 1.
El conjunto de números reales.
El producto cartesiano de los números reales consigo mismo, es decir $\mathbb{R}^2$.
Más adelante…
Una vez que hemos hablado de la cardinalidad de los conjuntos, podemos seguir hablando de los números naturales, de sus propiedades y la inducción. Después volveremos a encontrarnos la idea de contar conjuntos específicos y de técnicas para encontrar la cardinalidad de conjuntos finitos de algunos conjuntos.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra que $|\mathbb{N}| = |2\mathbb{Z_+}+1|$.
Demuestra que el conjunto generado por puras secuencias de $1$ y $0$ tiene la misma cardinalidad que $|P(\mathbb{N})|$.
Da un ejemplo de una función entre conjuntos infinitos cuya imagen no sea infinita.
Encuentra la cardinalidad de la imagen de la función $f: \mathbb{N} \rightarrow \mathbb{N}$ dada por $f(n) = 5m + 3$.
Siguiente entrada del curso: Variantes del principio de inducción en los naturales
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
¿Qué es lo que entiendes cuando alguien te dice: «En esta canasta hay cinco manzanas»? Probablemente te llegue a la mente una imagen similar a la siguiente:
Y es que para nosotros es muy natural el decir «cuántas» cosas hay dentro de un conjunto. De hecho los primeros usos que dieron lugar al nacimiento de las matemáticas datan de hace más de $5000$ años en mesopotamia con los primeros sistemas para contar. Esto remarca la necesidad de contar objetos que a su vez trata de diferenciar unos de otros.
Imagínate que te pidieran contar cuántos Pingüinos Rey hay en un zoológico. Para ello primero habría que saber distinguir a cuáles son este tipo de pingüinos y cuáles no. En un principio puede resultar fácil, y es que veremos que el distinguir elementos unos de otros puede llegar a complicarse cuando más consideraciones hacemos como el saber cuántos pingüinos hay que sean machos, o cuántos machos hay que no tengan más de un año, por ejemplo. Con este tipo de ejercicios los matemáticos fueron descubriendo con el tiempo que hacía falta poder estudiar un poco más a detalles este concepto de «diferenciar» y «contar» elementos de un conjunto. En las siguientes entradas vamos a desarrollar un poco más este concepto de diferenciar y contar.
Cardinalidad de un conjunto
Como todo en matemáticas, necesitaríamos hacer una definición de lo que significa que «un conjunto tenga $3$ elementos» y cómo es diferente a «un conjunto con $5$ elementos», por poner un ejemplo. Es con esto que damos la siguiente definición entre cardinalidad de un conjunto finito.
Definición. Sea $X$ un conjunto. Diremos que $X$ tiene cardinalidad finita o es finito si existe $n \in \mathbb{N}$ y una función biyectiva entre $X$ y $n$. En este caso escribiremos $|X|=n$.
Detengámonos un poco a analizar esta definición.
Recordemos que por ejemplo el número $2$ es escrito como conjunto como $$ \{\emptyset,\{\emptyset\}\}$$.
Ahora pensemos en un conjunto con un plátano y una manazana. Entonces podemos definir la siguiente función $f: X \rightarrow \mathbb{N}$ como $f(manzana)= \emptyset$ y $f(plátano)=\{\emptyset\}$:
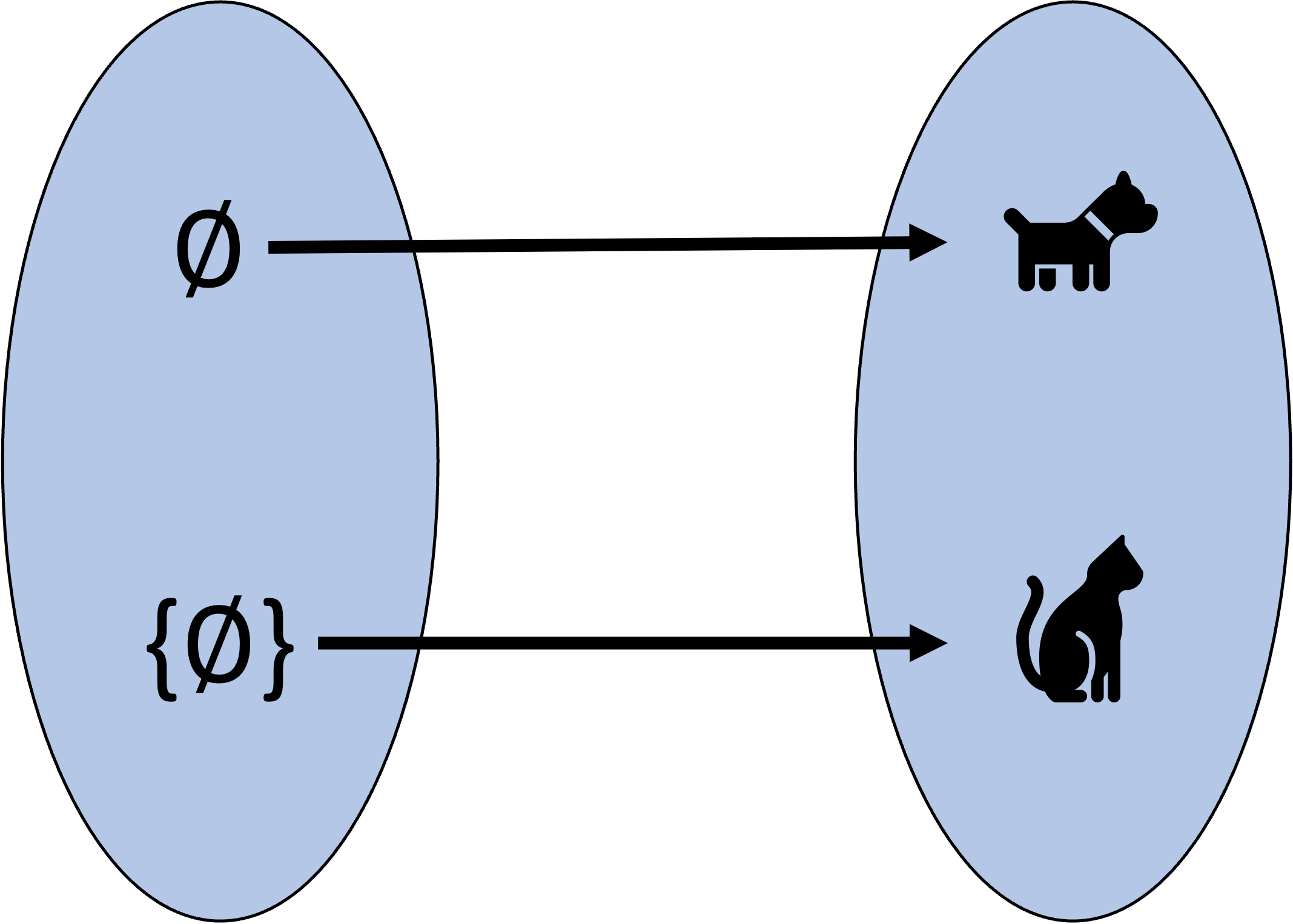
Puedes comprobar que esta función es biyectiva, y es solo una forma de biyectar el conjunto $X$ con el $2$. Dicho esto, entonces podemos decir que $|X|=2$. Ahora ¿Qué pasa con un conjunto que también tenga cardinalidad $2$? Digamos el conjunto $Y$ de un perro y un gato.
Entonces podríamos decir que igual puede haber una biyección entre los dos conjuntos $X$ y $Y$.
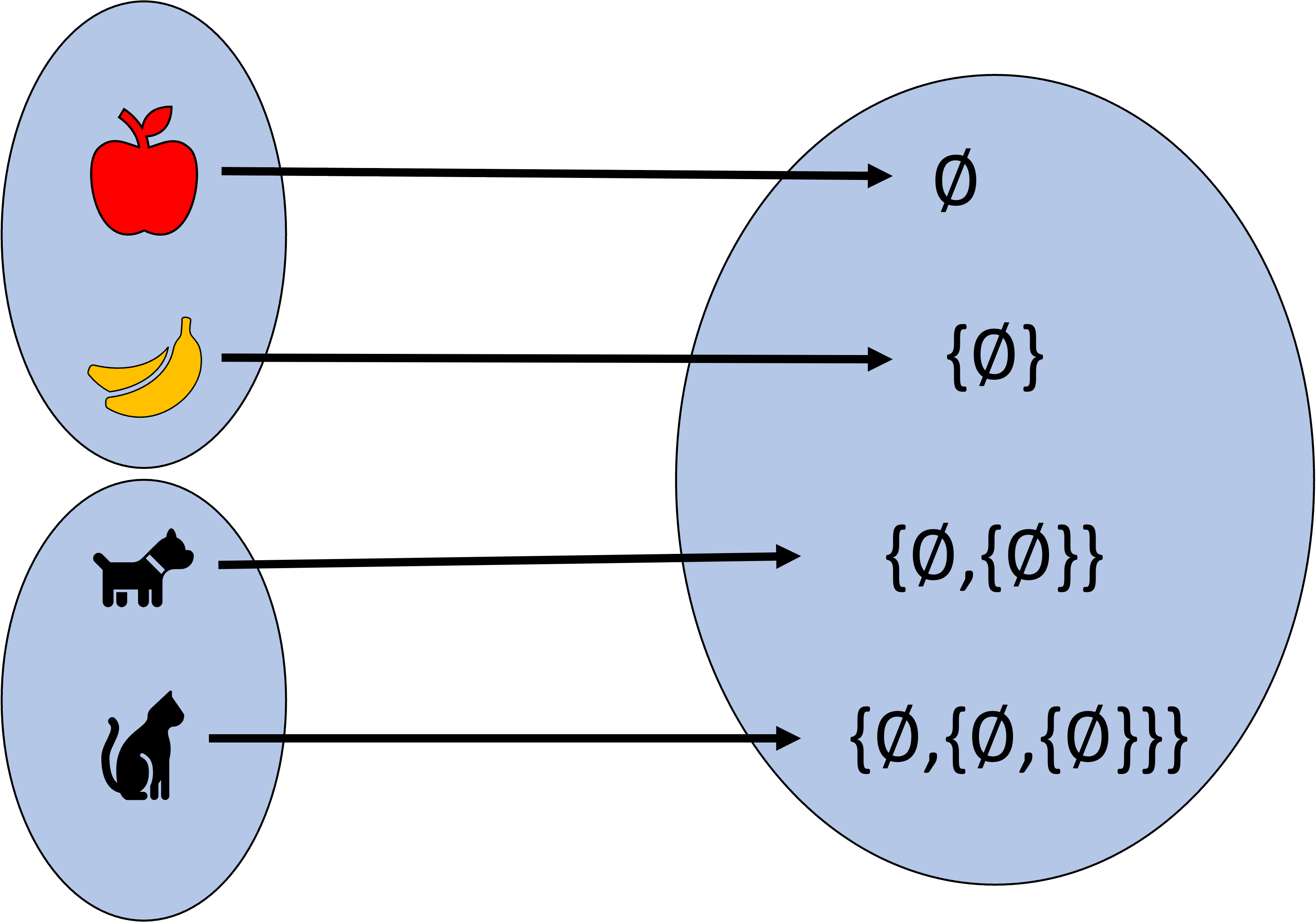
Ahora ¿Qué pasa si unimos los conjuntos de animales con los de ls frutas? Pues nuestra razón nos dirá que si en un conjunto tenemos dos elementos y en el otro dos, si los combinamos tendremos cuatro elementos, y esto es justamente otra de las bondades de la cardinalidad, pues se comporta de acuerdo a lo que nuestra razón nos dice.
Proposición Sean $X,Y$ dos conjuntos disjuntos. Si $|X|=n, |Y|=m$ entonces $|X \cup Y| = n+m$.
Demostración. Por definición de cardinalidad, existen dos funciones $g:X \rightarrow n$ y $f: Y \rightarrow m$ biyectivas. Notemos ahora que la función $h: X \cup Y \rightarrow n+m $ dada por $$h(x) = \begin{cases} &f(x), x \in X \\ g(x) + n, x \in Y \end{cases} $$ es biyectiva. Para demostrar que esta función es biyectiva, demostraremos la inyectividad y suprayectividad.
Es inyectiva. Considera dos elementos $x,y$ distintos. Existen tres casos, el primero es que $x,y \in X$, en este caso, $h(x)=f(x), h(y)=f(y)$ y como $f$ es inyectiva, sus imágenes son distintas. El segundo caso es $x , y \in Y$. En este caso, recordemos que $h(x)=n+g(x)$ y $h(y) = n + g(y)$ Si las imágenes fueran iguales entonces $g(x)=g(y)$ pero esto solo sucede si $x=y$, pues $g$ es inyectiva, y esto contradiciendo la hipótesis de que los elementos son distintos. Finalmente en el caso de que un elemento pertenezca a $X$, digamos $x$ y el otro a $Y$, digamos $y$, sucede que $h(x)=f(x)$, mientras que $h(y)=n+g(y)$, ahora notemos que $f: X \rightarrow n$, entonces ningún elemento es más grande que $n$, mientras que $h(y)$ sí es más grande que $n$, pues estamos uniendo números naturales al más grande número natural que compone al conjunto $X$, es decir, siempre sucederá que $h(x)<h(y)$ y en particular $h(x) \neq h(y)$, siendo la función inyectiva.
Además la función es suprayectiva, ya que para cualquier elemento $k \in n+m$ se tienen dos casos: Si $k <= n$ entonces existe $x \in X$ tal que $h(x)=f(x)=k$, mientras que si$k>n$ existe $l \in. \mathbb{N}$ tal que $n+l=k$. Por otro lado, como $g$ es suprayectiva, existe $y \in Y$ tal que $g(y)=l$. Así $h(y)=n+g(y)=n+l=k$. Por lo tanto la función es biyetiva.
Y más aún, hemos demostrado que los conjuntos disjuntos tienen cardinalidad $n+m$.
$\square$
El principio de las casillas
Una de las propiedades más importantes sobre cardinalidad que es intuitiva es la siguiente:
Proposición. (El principio de las casillas). Sean $X,Y$ dos conjuntos tales que $|X|=s(n)$ y $|Y|=n$. Entonces si $f:X \rightarrow Y$, $f$ no es inyectiva.
A esta se le llama principio de las casillas o de los palomares y se explica con el siguiente ejemplo:
Supón tienes $9$ casillas para palomas:
Naturalmente, solo cabrá a lo más una paloma en cada una de las casillas, entonces si lega al menos una paloma más, forzosamente tendría que haber más de una paloma en alguna de las casillas. En general para $n$ casillas, caben a lo más $n$ paloma para que quede solo una paloma en cada casilla. Es decir, podríamos hacer una inyección entre el número de palomas y el de casillas siempre y cuando haya menos palomas que casillas.
Demostración. Para ello deberíamos mostrar que no existe una inyección entre un conjunto de $n$ elementos y otro de $s(n)$.
Base de inducción. Sea $|X|=s(0)$ y $|Y|=0$. Notemos entonces que $Y$ tiene que ser el vacío, pues $0$ es el vacío y si $Y$ no fuera vacío, entonces existiría una función $f$ y un elemento $y \in Y$ tal que $f(y) \in \emptyset$. Lo cual es una contradicción. Ahora notemos que por vacuidad el enunciado se cumple, pues de no ser así, existiría una función $g:X \rightarrow Y$ inyectiva, pero esto supondría que $Im[g] \subset \emptyset$ tiene al menos un elemento.
Hipótesis de inducción. Ahora supongamos que para cualesquiera dos conjuntos $|X|=s(n)$ y $|Y|=n$ se cumple la condición.
Paso inductivo. Consideremos ahora dos conjuntos $X,Y$ con $|X|=s(s(n))$ y $|Y|=s(n)$. Ahora consideremos cualquier función $f: X \rightarrow Y$, bastará probar que esta función no es inyectiva. Para ello, notemos que si le quitamos cualquier elemento $x \in X$ a $X$, su cardinalidad será $s(n)$. Además si quitamos el elemento $y \in Y$ tal que $f(x)=y$ entonces $Y$ tiene cardinalidad $n$. Así volvemos al caso de la hipótesis de inducción donde la función $f’: X/\{x\} \rightarrow Y/{y}$ definida como $f'(x)=f(x)$ no es inyectiva, esto significa que existen dos elementos $y,z \in X/\{x\}$ tales que $f'(x)=f'(y)$. Más aún, la función $f$ tampoco es inyectiva por la existencia de estos dos elementos.
Así hemos demostrado el principio de las casillas.
$\square$
La cardinalidad de dos conjuntos
Una definición ahora sobre la cardinalidad de dos conjuntos es consecuencia de
Definición Dos conjuntos $X$ y $Y$ tienen la misma cardinalidad si existe una función biyectiva $f: X \rightarrow Y$ y lo escribiremos como $|X|=|Y|$
Y ahora veamos cómo es que en el caso finito, esta es una definición que no contradice la primera definición que dimos
Proposición En el caso finito, Son equivalentes para cualesquiera dos conjuntos finitos $X,Y$ y cualquier número natural $n$:
$|X| = n \land |Y| = n$
$|X| = |Y|$
Demostración.
$\Rightarrow$
Supongamos primero que $|X| = n$ y $|Y|=n$. Ahora, notemos que existen dos funciones biyectivas $f: X \rightarrow n$ y $g: Y \rightarrow n$ Ahora consideremos la siguiente función $g^{-1} \circ f : X \rightarrow Y$. Y notemos que es una biyección, pues como $g$ es biyectiva, en particular es suprayectiva y eso significa que $Im[g] = n$ Siendo entonces la función $g{-1}: Im[g] =n \rightarrow Y$ con el mismo dominio que el contradominio de $f$, es decir la composición es una función bien definida. Además como $f$ también es biyectiva, entonces $g^{-1} \circ f$ también es biyectiva.
$\Leftarrow$
Demostremos ahora por contradicción que $|X| = n \land |Y| = n$ cuando $|X|=|Y|$.
Para ello supongamos primero que existen dos naturales distintos $n,m$ tales que $|X|=n$ y $|Y|=m $, y esto es posible pues $X,Y$ son finitos. Y también $|X|=|Y|$ Ahora sin perdida de la generalidad supongamos que $n>m$. Pero esto es una contradicción al principio de las casillas, pues toda función de $X$ a $Y$ no sería inyectiva, y en general tampoco será biyectiva. Cumpliéndose así la condición deseada.
$\square$
Algunas propiedades más de la cardinalidad
Veamos ahora otras propiedades sobre las cardinalidades de los conjuntos. Para ello supón que $X$ es finito de cardinalidad $n$ y $Y$ es finito de cardinalidad $m$.
Proposición. $|X /Y| = |X| – |X \cap Y|$ Demostración. Esto es consecuencia del hecho de que $X/Y$ y $X \cap Y$ son conjuntos disjuntos, entonces: $$ |X/Y| + |X \cap Y| = |X/Y \cup (X \cap Y)| = |X|$$
Proposición. $|P({X)|=2^{|X|}$ Demostración. Por inducción sobre el número de elementos en el conjunto $X$. Base de inducción. Si $X$ tiene $0$ elementos, entonces es el vacío, mientras que $P(X)={\emptyset}$ el cuál tiene cardinalidad $1=2^{0}$. Hipótesis de inducción. Ahora supongamos que si $|X|=n$ para algún número $n$ natural, entonces $|P(X)|=2^{n}$. Paso inductivo. Sea $|X|=n+1$. Consideremos ahora un elemento $x$ de $X$ y notemos que el conjunto $X/\{x\}$ es un conjunto con $n$ elementos, por lo cual sabemos que $|P(X/\{x\})|=2^n$. Ahora veamos que este conjunto describe todos los posibles subconjuntos de $X$ en los que $x$ no está incluído, por lo que si definimos el conjunto $P(X/\{x\}) \cup x := {A \cup x : A \in P(X/\{x\})}$, se tiene que $$(P(X/\{x\}) \cup x) \cup P(X/\{x\}) = P(X) $$ Pues el primer conjunto son todos los subconjuntos de $X$ que sí tienen a $x$ y el segundo aquellos que no. Como estos dos son conjuntos disjuntos y tienen exactamente $n$ elementos, entonces $$|P(X)| = |(P(X/\{x\}) \cup x) \cup P(X/\{x\})| = 2^n + 2^n = 2^{n+1}$$.
$\square$
Más adelante…
Ahora que hemos introducido el concepto de cardinalidad, veremos cómo es que podemos escalar este concepto del caso finito al caso infinito. Es decir ¿Qué pasa cuando ya no podemos hablar de conjuntos que podemos «contar»?
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra que $(P(X/\{x\}) \cup x) \cup P(X/\{x\}) = P(X)$
Demuestra que $|X|=|Y|$ si y solo si $|Y|=|X|$
Demuestra que la relación «tener la misma cardinalidad» es de equivalencia.
Siguiente entrada del curso: Varios tamaños de conjuntos infinitos
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
En esta entrada demostraremos que el conjunto de los números naturales es un conjunto bien ordenado.
Resultados previos
A continuación demostraremos el siguiente lema que nos dice que la intersección de dos números naturales resulta ser un número natural.
Lema. Si $n,m\in \mathbb{N}$, entonces $n\cap m\in \mathbb{N}$.
Demostración.
Sean $n,m\in \mathbb{N}$.
$n\cap m$es un conjunto transitivo: En la entrada de construcción de números naturales se demostró que intersección de conjuntos transitivos es transitivo. Como $n$ y $m$ son naturales, entonces son transitivos. Así, $n\cap m$ también lo es.
$n\cap m$ es un orden total con la pertenencia:
Notemos la relación de pertenencia en $n\cap m$ es la relación $\in_{n\cap m}=\in_n\cap((n\cap m)\times(n\cap m))$. En efecto, si $x\in_{n\cap m}y$, entonces, $x\in y$ y $x,y\in n\cap m$; en particular, $x\in y$ y $x,y\in n$, es decir, $x\in_ny$. Esto muestra que $\in_{n\cap m}\subseteq \in_n\cap((n\cap m)\times(n\cap m))$. Por otro lado, si $x\in_n y$ y $x,y\in n\cap m$, entonces, $x\in y$ y $x,y\in n\cap m$, es decir, $x\in_{n\cap m}y$. Esto demuestra la igualdad mencionada.
–Asimetría de $\in_{n\cap m}$.
Sean $z,w\in n\cap m$ tales que $z\in_{n\cap m} w$. Dado que $z\in_{n\cap m}w$, entonces $z\in_nw$. De este modo, $w\notin_{n\cap m} z$, ya que de lo contrario, $w\in_n z$, lo cual contradice que $\in_n$ sea una relación asimétrica. Por lo tanto, $\in_{n\cap m}$ es asimétrica.
–Transitividad de $\in_{n\cap m}$.
Sean $z,w,y\in n\cap m$ tales que $z\in_{n\cap m} w$ y $w\in_{n\cap m} y$. Entonces, $z\in_n w$ y $w\in_n y$, por lo que $z\in_n y$ por la transitividad de $\in_n$. Así pues $z\in_n y$ y $z,y\in n\cap m$, y en consecuencia $z\in_{n\cap m}y$.
– $\in_{n\cap m}$-comparables.
Sean $z,w\in n\cap m$. En particular, $z,w\in n$. Luego, por ser $(n, \in_n)$ un orden total, $z\in_n w$ o $w\in_n z$ o $z=w$. En consecuencia, $z\in_{n\cap m}w$ o $w\in_{n\cap m}z$ o $z=w$. Por lo tanto, los elementos de $n\cap m$ son $\in_{n\cap m}$-comparables.
Cualquier subconjunto $B$ no vacío de $n\cap m$ tiene elemento mínimo y máximo.
Veamos que $B$ tiene mínimo. Lo del máximo quedará como uno de los ejercicos. Dado que $B\subseteq n\cap m$, entonces, en particular, $B\subseteq n$. Dado que $n$ es un número natural y $B$ es un subconjunto no vacío de $n$, $B$ tiene mínimo con respecto a $\in_n$.
Sea $a=\min(B)$ con respecto a $\in_n$. Luego, $a\in_nx$ para todo $x\in B\setminus\set{a}$. Así pues, si $x\in B\setminus\set{a}$ es cualquier elemento, entonces, $a\in_n x$ y, como $a,x\in n\cap m$ pues $B\subseteq n\cap m$, se sigue, $a\in_{n\cap m}x$. Por lo tanto, $a=\min(B)$ en el orden $\in_{n\cap m}$.
Por lo tanto, si $n,m\in \mathbb{N}$, entonces $n\cap m\in \mathbb{N}$.
$\square$
En la tarea moral te corresponde probar que cualquier subconjunto no vacío de $n\cap m$ tiene elemento máximo.
Antes de demostrar nuestro resultado principal, probaremos otros dos resultados auxiliares.
Lema. Si $n, m$ son naturales distintos $n\subsetneq m$, entonces $n\in m$.
Demostración.
Sean $n,m\in \mathbb{N}$ distintos tales que $n\subsetneq m$. Como, $m\setminus n\subseteq m$ y $m\setminus n\not=\emptyset$, existe $k=\min(m\setminus n)$ con respecto a $\in_{m}$.
Afirmación. $k=n$.
Demostración de la afirmación.
$\subseteq$) Sea $y\in k$, entonces $y\in m$ por ser $m$ un conjunto transitivo. Luego, $y\in n$, pues de lo contrario $y\in m\setminus n$ y así, $y$ sería un elemento en $m\setminus n$ tal que $y\in k$, pero esto es imposible pues $k=\min(m\setminus n)$. Por lo tanto, $y\in n$ y, por ende, $k\subseteq n$.
$\supseteq$) Sea $y\in n$. Como $n\subseteq m$, entonces $y\in m$. Ahora, por ser $m$ un natural, $m$ está ordenado totalmente por la pertenencia. Así que, $y,k\in m$, o bien $y\in k$ o bien $k\in y$ o bien $y=k$. No puede ocurrir que $k\in y$, pues de ser así se tendría que $k\in n$ ya que $y\in n$ y $n$ es transitivo por ser un número natural. Así, tendríamos $k\notin m\setminus n$, lo cual contradice la elección de $k$. Ahora, no puede ocurrir que $k=y$, pues nuevamente tendríamos que $k\in n$ y ya vimos que esto conduce a una contradicción. Luego, tiene que ocurrir que $y\in k$. Esto demuestra que $n\subseteq k$.
Por lo tanto, $n=k$ y, en consecuencia, $n\in m$.
$\square$
Lema. Si $n$ y $m$ son naturales, entonces $n\in m$ o $m\in n$ o $n=m$, es decir, $n,m$ son $\in$-comparables.
Demostración.
Sean $n,m\in\mathbb{N}$. Tenemos los siguientes casos:
Caso 1. Si $n=m$ no hay más que probar.
Caso 2. $n\not=m$.
Consideremos a la intersección $n\cap m$. Luego, $n\cap m\subseteq m$ y $n\cap m\subseteq n$. Si $n\cap m=m$, entonces $m\subseteq n$, pero $m\not=n$, por lo que $m\subsetneq$ y por el lema anterior tenemos que $m\in n$. Si $n\cap m=n$, entonces $n\subseteq m$, pero $n\not=m$, por lo que $n\subset m$ y, en consecuencia, $n\in m$.
Por tanto, si $n\not=m$, entonces $n\in m$ o $m\in n$. En consecuencia, cualesquiera dos números naturales son $\in$-comparables.
$\square$
Los naturales están bien ordenados
Estamos listos para probar el resultado principal de esta entrada.
Teorema. $(\mathbb{N}, \leq)$ es un conjunto bien ordenado.
Demostración.
Veamos primero que $\leq$ en $\mathbb{N}$ es reflexiva, antisimétrica y transitiva. Luego, veremos que $\mathbb{N}$ es un conjunto bien ordenado con $\leq$.
– Reflexividad.
Sea $n\in \mathbb{N}$. Dado que $n=n$ se cumple que $n\leq n$.
– Antisimetría.
Sean $n,m\in \mathbb{N}$. Supongamos que $n\leq m$ y $m\leq n$. Como $n\leq m$, sabemos que $n\in m$ o $n=m$. El caso $n\in m$ lleva a una contradicción, pues como $m\leq n$ entonces o $m=n$ (y llegamos a la contradicción $n\in n$) o $m\in n$ (y llegamos a la contradicción $n\in m$ y $m\in n$). Así, $n=m$.
Los argumentos anteriores muestran que $\leq$ es una relación antisimétrica en $\mathbb{N}$.
– Transitividad.
Sean $n,m,l\in \mathbb{N}$. Supongamos que $n\leq m$ y $m\leq l$. Veamos que $n\leq l$ Dado que $n\leq m$, entonces $n\in m$ o $n=m$ y como $m\leq l$, entonces $m\in l$ o $m=l$. Caso 1: Si $n\in m$ y $m\in l$, entonces $m\subseteq l$ por ser $l$ un conjunto transitivo y así, $n\in l$. Caso 2: Si $n\in m$ y $m=l$, entonces $n\in l$. Caso 3: Si $n=m$ y $m\in l$, entonces $n\in l$. Caso 4: Si $n=m$ y $m=l$, entonces $n=l$. En cualquier caso ocurre que $n\in l$ o $n=l$, es decir, $n\leq l$.
Por lo tanto, $\leq$ es una relación transitiva. Estas propiedades nos permiten concluir que $\leq$ es un orden parcial en $\mathbb{N}$.
Para mostrar que $\mathbb{N}$ es un conjunto bien ordenado con $\leq$, sólo resta probar que cualquier subconjunto no vacío de $\mathbb{N}$ tiene elemento mínimo con respecto a $\leq$.
– Buen orden.
Sea $B\not=\emptyset$ tal que $B\subseteq \mathbb{N}$ y veamos que $B$ tiene elemento mínimo. Dado que $B\not=\emptyset$, podemos fijar $x\in B$. Luego, $x\in \mathbb{N}$ y por tanto $s(x)\in \mathbb{N}$. Consideremos $s(x)\cap B$ conjunto no vacío pues $x\in s(x)$ y $x\in B$. Notemos además que $s(x)\cap B$ es subconjunto no vacío de $s(x)$, por lo que $s(x)\cap B$ tiene elemento mínimo con respecto a $\in$ en $s(x)$.
Sea $k=\min(s(x) \cap B)$. Afirmamos que $k=\min(B)$ en $\leq$. En efecto, si $n\in B$, entonces $n\in s(x)\cap B$ o $n\notin s(x)$; si $n\in s(x)\cap B$, entonces $n=k$ o $k\in n$ pues $k=\min(s(x)\cap B)$ con respecto a $\in$. Supongamos ahora que $n\notin s(x)$. Por un lema visto en esta entrada, y dado que $n$ y $s(x)$ son naturales tales que $n\notin s(x)$ , entonces $s(x)\in n$ o $s(x)=n$. Si $n=s(x)$, entonces $k\in n$ pues $k\in s(x)$. Finalmente, si $s(x)\in n$, entonces $s(x)\subseteq n$ por ser $n$ conjunto transitivo y, en consecuencia, $k\in n$, ya que $k\in s(x)$. En cualquier caso tenemos que $k\leq n$, lo que demuestra que $k=\min(B)$ con respecto a la relación $\leq$ definida en $\mathbb{N}$.
Por lo tanto, $(\mathbb{N}, \leq)$ es un conjunto bien ordenado.
$\square$
Tarea moral
La siguiente lista de ejercicios te permitirá reforzar el contenido visto en esta sección:
Sea $X$ un subconjunto no vacío de $\mathbb{N}$, demuestra que $\bigcap X\in \mathbb{N}\cap X$. (Nota que esta es una generalización del primer lema que probamos en esta entrada).
Muestra que cualquier subconjunto no vacío de $n\cap m$ tiene elemento máximo.
Más adelante…
En la siguiente entrada haremos una breve pausa en funciones compatibles. Esto nos servirá más adelante para probar el teorema de recursión. Dicho teorema será de utilidad para definir recursivamente a la suma y el producto en el conjunto de los números naturales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»