En entradas anteriores, mencionamos la clasificación afín de curvas cuadráticas, en las siguientes líneas, continuaremos con este análisis, convirtiendo los parámetros $\alpha, \beta$ y $\gamma$ o $a$ y $b$ que ya vimos anteriormente, en $1$ o $-1$, lo que nos va a permitir concluir con esta clasificación.
Clasificación
Para poder convertir los parámetros $a$ y $b$ de las cónicas y transformarlos en $1$ o $-1$, se debe alargar o encoger en los ejes.
Por ejemplo, para la parábola que está dada por el polinomio $P(x,y)=x^2+ay$ con $a\neq 0$, podemos lograr esto si hacemos:
Lo que nos da el polinomio de la parábola canónica.
Observa que, en $(1)$, ya no tenemos los términos $a$ o $b$ con los que escribimos la ecuación de las cónicas en la Unidad 2.
Con lo anterior, puedes darte cuenta de que, para cualquier polinomio en el que los valores estén en la parte lineal, podemos dividir o multiplicar por $a$ o $b$ para hacerlo $1$ o $-1$.
Pero, ¿cómo podemos eliminar estos términos cuando los valores están en la parte cuadrática?
Considerando la matriz de la parte cuadrática que está dada por una matriz de la forma:
\begin{equation} B^TAB=\begin{pmatrix} a & 0 \\ 0 & b \end{pmatrix} \begin{pmatrix} \alpha & 0 \\ 0 & \beta \end{pmatrix} \begin{pmatrix} a & 0 \\ 0 & b \end{pmatrix}=\begin{pmatrix} a^2 \alpha & 0 \\ 0 & b^2 \beta \end{pmatrix}\end{equation}
De la matriz anterior, como queremos tener una matriz de la forma:
Entonces, debemos tomar los valores $a=\left(\sqrt{|\alpha|} \right)^{-1}$ y $b=\left(\sqrt{|\beta|} \right)^{-1}$
Tarea moral
¿Cuál es la matriz de una homotecia que lleve a la parábola dada por $x^2+ay$ con $a\neq 0$, en la canónica dada por $x^2-y$?
Del ejercicio anterior, concluye que hay solo una clase de parábolas módulo semejanzas.
Más adelante…
Eso es todo por el momento para la materia de Geometría analítica I, en las siguientes entradas, empezaremos con nuevos temas, correspondientes al curso de Geometría analítica II.
En esta ocasión estudiaremos la potencia de un punto con respecto a una circunferencia, esta es una herramienta que nos permite establecer una medida de la distancia de un punto a una circunferencia dada.
Potencia de un punto respecto a una circunferencia
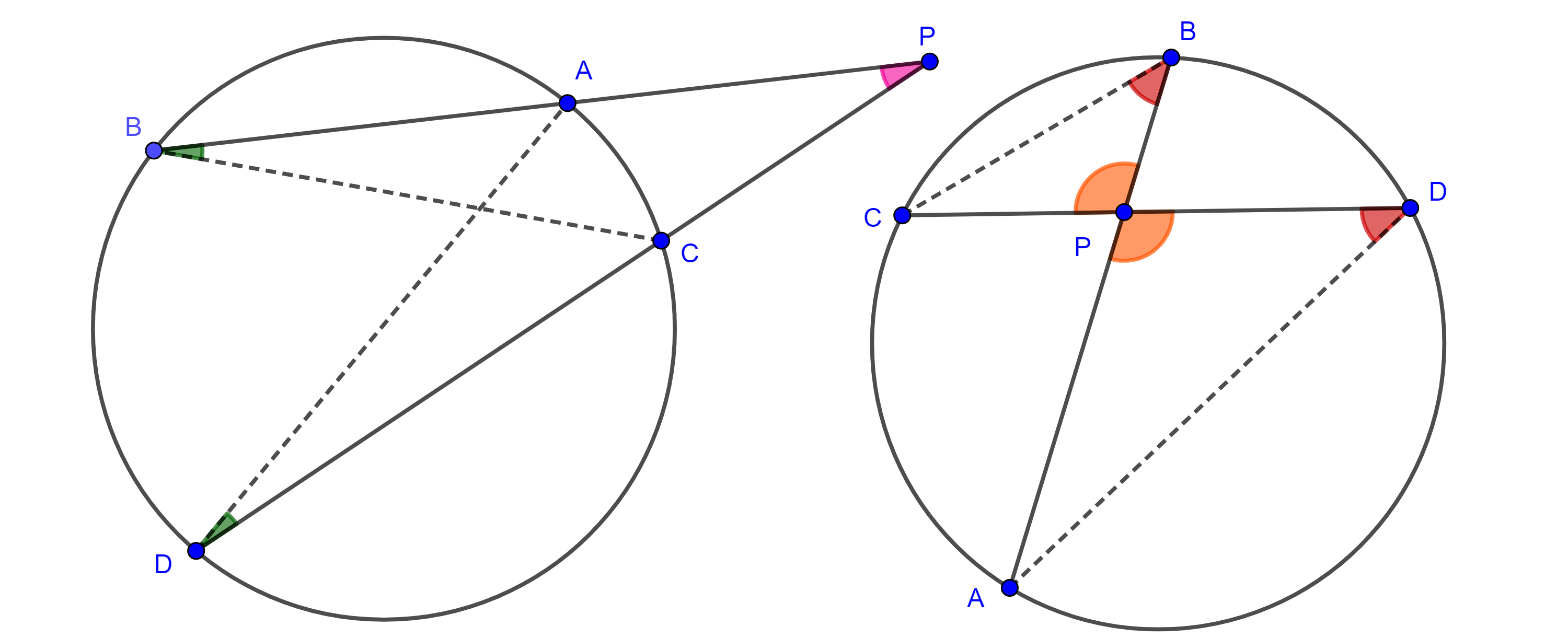
Teorema 1. Sea $\Gamma$ una circunferencia y $P$ un punto en el plano, por $P$ tracemos una secante a $\Gamma$, con intercesiones en $A$ y en $B$, entonces el número $PA \times PB$ es independiente de la secante que tracemos.
Demostración. Consideremos dos secantes desde $P$, $PAB$ y $PCD$, consideremos los triángulos $\triangle PAD$ y $\triangle PCB$, tenemos que $\angle CDA = \angle CBA$, pues abarcan el mismo arco de circunferencia.
Figura 1
Si $P$ es un punto exterior a $\Gamma$, $\angle APC$ es un ángulo común de los triángulos considerados.
Si $P$ es un punto interior a $\Gamma$, $\angle APD = \angle BPC$ por ser opuestos por el vértice.
Por criterio de semejanza AA, $\triangle PAD \sim \triangle PCB$, $\Rightarrow \dfrac{PA}{PC} = \dfrac{PD}{PB}$ $\Rightarrow PA \times PB = PC \times PD$.
$\blacksquare$
Definición. Al valor constante $PA \times PB$, se le conoce como la potencia de $P$ respecto a la circunferencia $\Gamma$.
Otras expresiones para la potencia
Proposición 1. Sea $P$ un punto en el plano y $(O, R)$ una circunferencia, entonces la potencia de $P$ respecto a $(O, R)$ es igual a $|OP^2 – R^2|$.
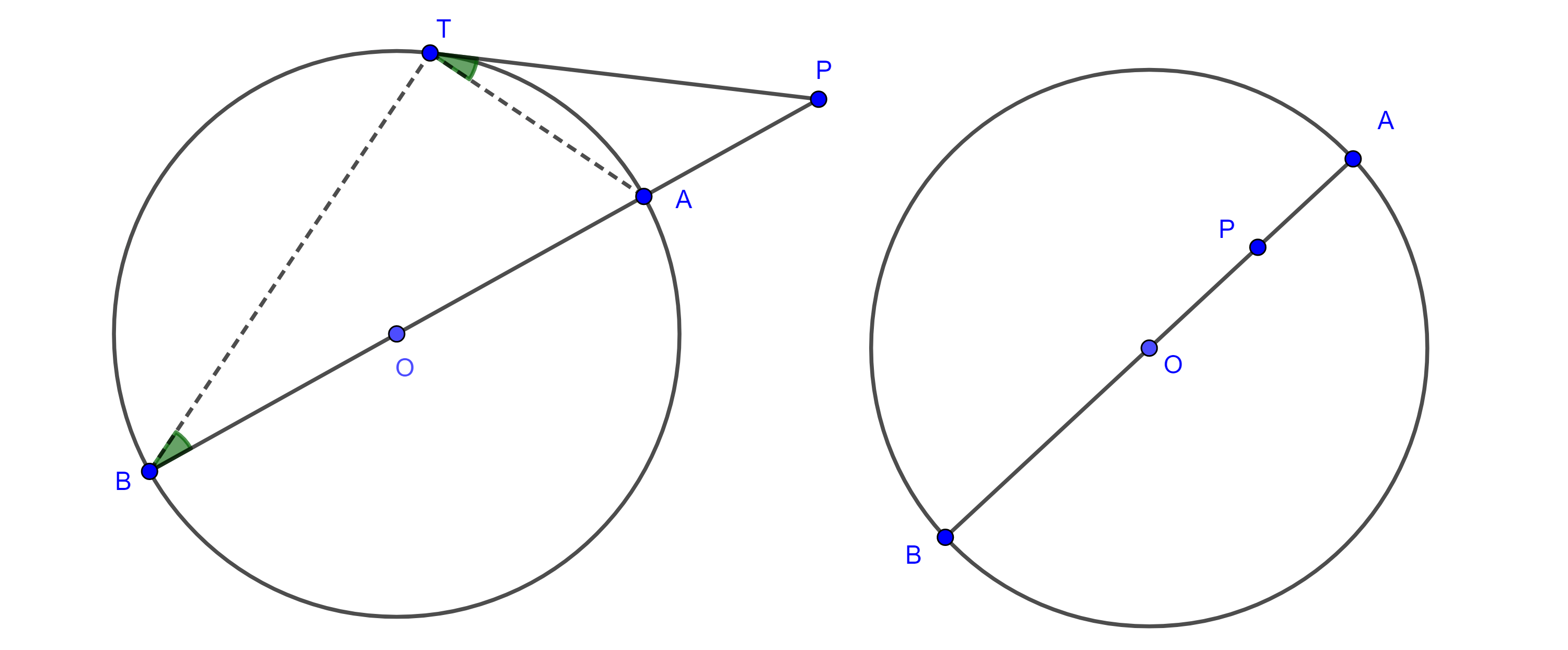
Demostración. Por $P$ tracemos la secante $AB$ a $(O, R)$ que pasa por $O$.
Proposición 2. Si $P$ es un punto exterior a una circunferencia $\Gamma$, entonces el cuadrado del segmento tangente $PT$ a $\Gamma$ es igual a la potencia de $P$ respecto a $\Gamma$.
Demostración. Tracemos una secante $PAB$ por $P$ a $\Gamma$ (figura 2), consideremos $\triangle PAT$ y $\triangle PTB$, como el ángulo semiinscrito $\angle ATP$, abarca el mismo arco que el ángulo inscrito $\angle ABT$, entonces son iguales, además $\angle TPA$ es un ángulo común a ambos triángulos.
Por criterio de semejanza AA, $\triangle PAT \sim \triangle PTB$, $\Rightarrow \dfrac{PA}{PT} = \dfrac{PT}{PB}$ $\Rightarrow PA \times PB = PT^2$
$\blacksquare$
Teorema de las cuerdas
Teorema 2. Considera dos segmentos $AB$, $CD$ que se intersecan en $P$, entonces $A$, $B$, $C$ y $D$ son cíclicos si y solo si $PA \times PB = PC \times PD$.
Demostración. Supongamos que $A$, $B$, $C$, y $D$ son cíclicos, tanto si $P$ es interno o externo a la circunferencia, por el teorema 1, $PA \times PB = PC \times PD$.
Figura 3
Ahora supongamos se cumple $PA \times PB = PC \times PD$, $\Rightarrow \dfrac{PB}{PD} = \dfrac{PC}{PA}$.
En caso de que $P$ este en la extensión de ambos segmentos (izquierda figura 3), $\angle APC$ es un ángulo común de los triángulos $\triangle PCB$ y $\angle PAD$.
En caso de que $P$ este contenido en ambos segmentos (derecha figura 3), entonces $\angle BPC = \angle APD$ por ser opuestos por el vértice.
Por criterio de semejanza LAL, $\triangle PCB \sim \triangle PAD$ $\Rightarrow \angle CDA = \angle CBA$.
Sabemos que el lugar geométrico de los puntos que subtienden ángulos iguales con el segmento $AC$, es un arco de circunferencia que pasa por $A$ y $C$. Por lo tanto, $A$, $B$, $C$ y $D$ son cíclicos.
$\blacksquare$
Formula de Euler
Teorema 3, formula de Euler. Considera el circuncírculo $(O, R)$ y el incírculo $(I, r)$ de un triángulo $\triangle ABC$, entonces $IO^2 = R(R – 2r)$.
Demostración. Sea $K = AI \cap (O, R)$, entonces $\angle BAK = \angle KAC$, pues $AK$ es bisectriz de $\angle A$.
$\angle KAC = \angle KBC$, pues abarcan el mismo arco, por lo tanto $\angle BAK = \angle KBC$.
El ángulo $\angle BIK$ es un ángulo exterior de $\triangle BAI$, por lo que es igual a la suma de los ángulos no adyacentes a el, $\angle BIK = \angle IBA + \angle BAI = \dfrac{\angle A + \angle B}{2}$ $\Rightarrow \angle BIK = \angle KBI$.
Por lo tanto $\triangle IKB$ es isósceles.
Por otro lado, considera $K’ = KO \cap (O, R)$, $Z = AB \cap (I, r)$, $\triangle BK’K$ es rectángulo, pues $KK’$ es diámetro.
Notemos que $\angle ZAK = \angle BAK = \angle BK’K$, pues abarcan el mismo arco, entonces por criterio de semejanza AA, $\triangle ZAI \sim \triangle BK’K$ $\Rightarrow \dfrac{AI}{K’K} = \dfrac{ZI}{BK}$ $\Rightarrow \begin{equation} AI \times BK = K’K \times ZI = 2Rr. \end{equation}$
Por la proposición 1, la potencia de $I$ con respecto a $(O, R)$ $\Rightarrow \begin{equation} AI \times KI = R^2 – IO^2. \end{equation}$
Haciendo el cociente de $(1)$ y $(2)$ tenemos que $\dfrac{BK}{KI} =\dfrac{2Rr}{R^2 – IO^2}$.
Como $\triangle IKB$ es isósceles entonces $BK = KI$ $\Rightarrow IO^2 – R^2 = –2Rr$ $\Rightarrow IO^2 = R^2 – 2Rr = R(R – 2r)$.
$\blacksquare$
Reciproco de la formula de Euler
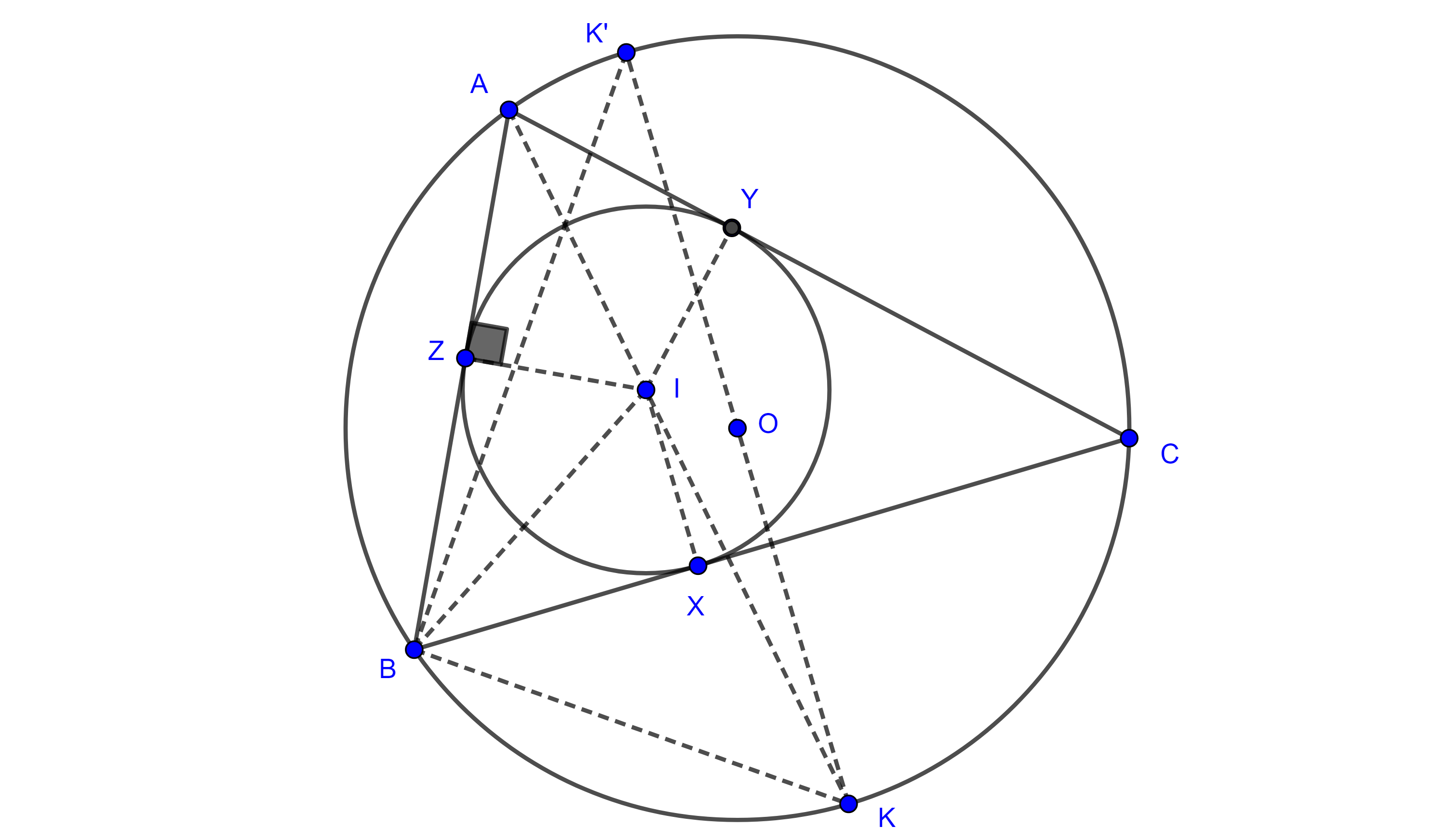
Teorema 4. Sean $(O, R)$, $(I, r)$, dos circunferencias tal que $(I, r)$ está en el interior del círculo $(O, R)$ y tal que la distancia entre sus centros cumple la igualdad $IO^2 = R(R – 2r)$, entonces existen una infinidad de triángulos inscritos en $(O, R)$ y circunscritos en $(I, r)$.
Demostración. Dado que varios argumentos son iguales a los del teorema 3 solo serán mencionados, nos guiaremos en la figura 4.
Desde cualquier punto $A \in (O, R)$ trazamos las tangentes a $(I, r)$ que intersecan a $(O, R)$ en $B$ y $C$, sea $K = AI \cap (O, R)$, usando la igualdad dada y la potencia de $I$ respecto de $(O, R)$ obtenemos, $\begin{equation} AI \times IK = R^2 – IO^2 = 2Rr. \end{equation}$.
Sean $Z$ e $Y$ los puntos de tangencia de $AB$ y $AC$ con $(I, r)$ respectivamente, por criterio hipotenusa-cateto los triángulos rectángulos $\triangle AIZ$ y $\triangle AIY$ son congruentes por lo que $AK$ es bisectriz de $\angle A$.
Sea $K’ = KO \cap (O, R)$, como $\triangle BKK’$ es rectángulo y $\angle BK’K = \angle ZAI$, por criterio de semejanza AA, $\triangle ZAI \sim \triangle BK’K$ y tenemos que $\dfrac{AI}{K’K} = \dfrac{ZI}{BK}$ $\Rightarrow \begin{equation} AI \times BK = K’K \times ZI = 2Rr. \end{equation}$
Por $(3)$ y $(4)$ tenemos $AI \times IK = AI \times BK$ $\Rightarrow IK = BK$
Así $\triangle IKB$ es isósceles y $\angle KBI = \angle BIK$, pero $\angle KBI = \angle KBC + \angle CBI = \dfrac{\angle A}{2} + \angle CBI$ y $\angle BIK = \dfrac{\angle A}{2} + \angle IBA$, $\Rightarrow CBI = IBA$.
Sea $X$ pie de la perpendicular a $BC$ desde $I$, entonces por criterio de congruencia ALA, $\triangle IZB \cong \triangle IXB$ $\Rightarrow IZ = IX$.
Por lo tanto, $BC$ es tangente a $(I, r)$ en $X$, así $\triangle ABC$ está inscrito en $(O, R)$ y circunscrito en $(I, r)$.
$\blacksquare$
Lema de Haruki
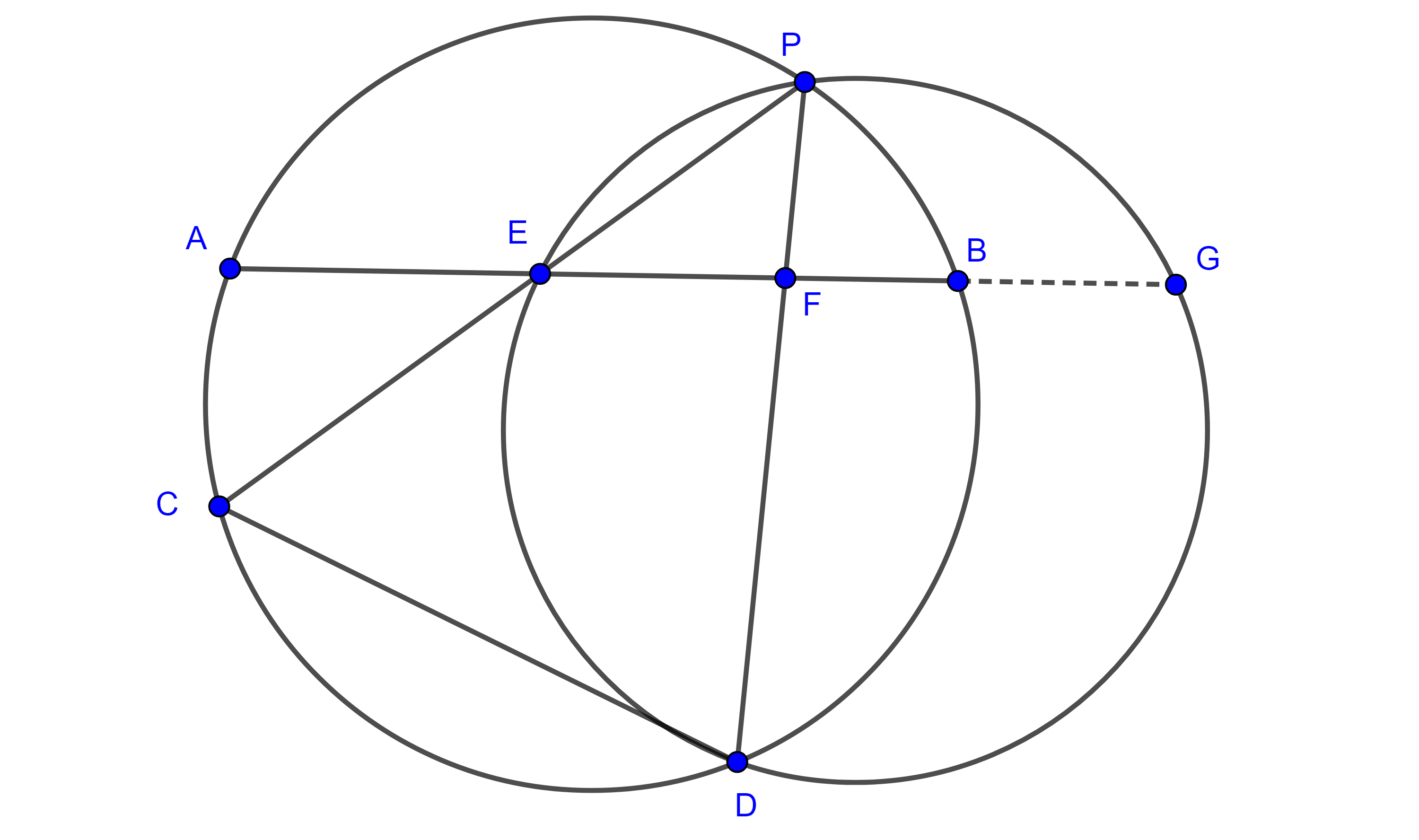
Lema de Haruki. Sean $AB$ y $CD$ dos cuerdas de una circunferencia $\Gamma_1$ que no se intersecan considera $P$ un punto variable en el arco $\overset{\LARGE{\frown}}{BA}$ que no contiene a $C$ y a $D$. Sean $E = PC \cap AB$ y $F = PD \cap AB$, entonces el numero $\dfrac{AE \times FB}{EF}$, es independiente de la posición de $P$ en el arco $\overset{\LARGE{\frown}}{BA}$.
Demostración. Consideremos $\Gamma_2$ circuncírculo de $\triangle PED$ y sea $G = AB \cap \Gamma_2$, entonces $\angle EPD = \angle EGD$, pues abarcan el mismo arco.
Entonces $\angle AGD = \angle EGD = \angle EPD = \angle CPD$, esté último ángulo es fijo mientras $P$ varié en el arco $\overset{\LARGE{\frown}}{BA}$.
Figura 5
$A$ y $D$ son puntos fijos y $G$ siempre está sobre la recta $AB$, $G$ es un punto fijo, por lo tanto, el valor $BG$ es fijo.
Por otro lado, calculamos la potencia de $F$ respecto de ambas circunferencias $FA \times FB = FP \times FD$ y $FE \times FG = FP \times FD$ $\Rightarrow (AE + FE) FB = FP \times FD = EF (FB + BG)$ $\Rightarrow \dfrac{AE \times FB}{EF} = BG$.
$\blacksquare$
Mas ejemplos
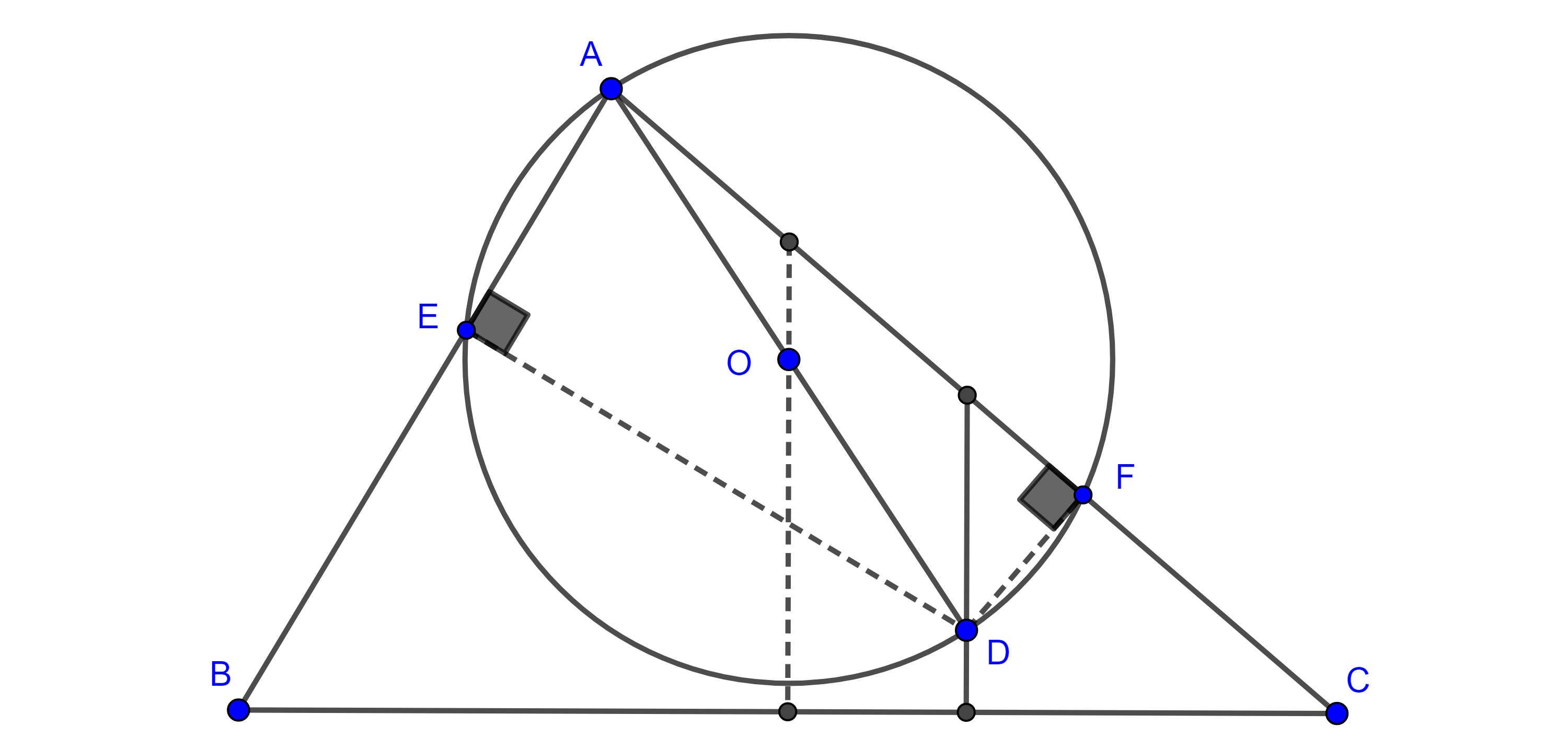
Problema 1. Sean $\triangle ABC$ y $D$ un punto interior del triángulo tal que $BE \times BA = CA \times CF$ donde $E$ y $F$ son los pies de las perpendiculares a $AB$ y $AC$ trazados desde $D$, encuentra el lugar geométrico de $D$.
Solución. Como $\angle DEA = \angle AFD = \dfrac{\pi}{2}$, entonces $AD$ es diámetro de una circunferencia que pasa por $E$ y $F$, por lo que el centro $O$ de dicha circunferencia $\Gamma(O)$ es el punto medio de $AD$.
Figura 6
Por la proposición 1, la potencia de $B$ y $C$ respecto a $\Gamma(O)$ es $OB^2 – R^2 = BE \times BA = CA \times CF = OA^2 – R^2$, $\Rightarrow OB = OC$.
Esto implica que el conjunto $R$, de los puntos medios del segmento $AD$, esta contenido en la mediatriz del segmento $BC$, así el lugar geométrico de los puntos $D$, está en homotecia con centro en $A$ y razón $2$ con el conjunto $R$, esto es una recta paralela a la mediatriz de $BC$ y que esta en el interior de $\triangle ABC$.
$\blacksquare$
Observación. Notemos que si $D$ es un punto exterior de $\triangle ABC$ entonces $B$ y $C$ podrían situarse en lugares distintos respecto de $\Gamma(O)$, es decir uno fuera y otro dentro, por lo que la igualdad $OB = OC$ no seria cierta.
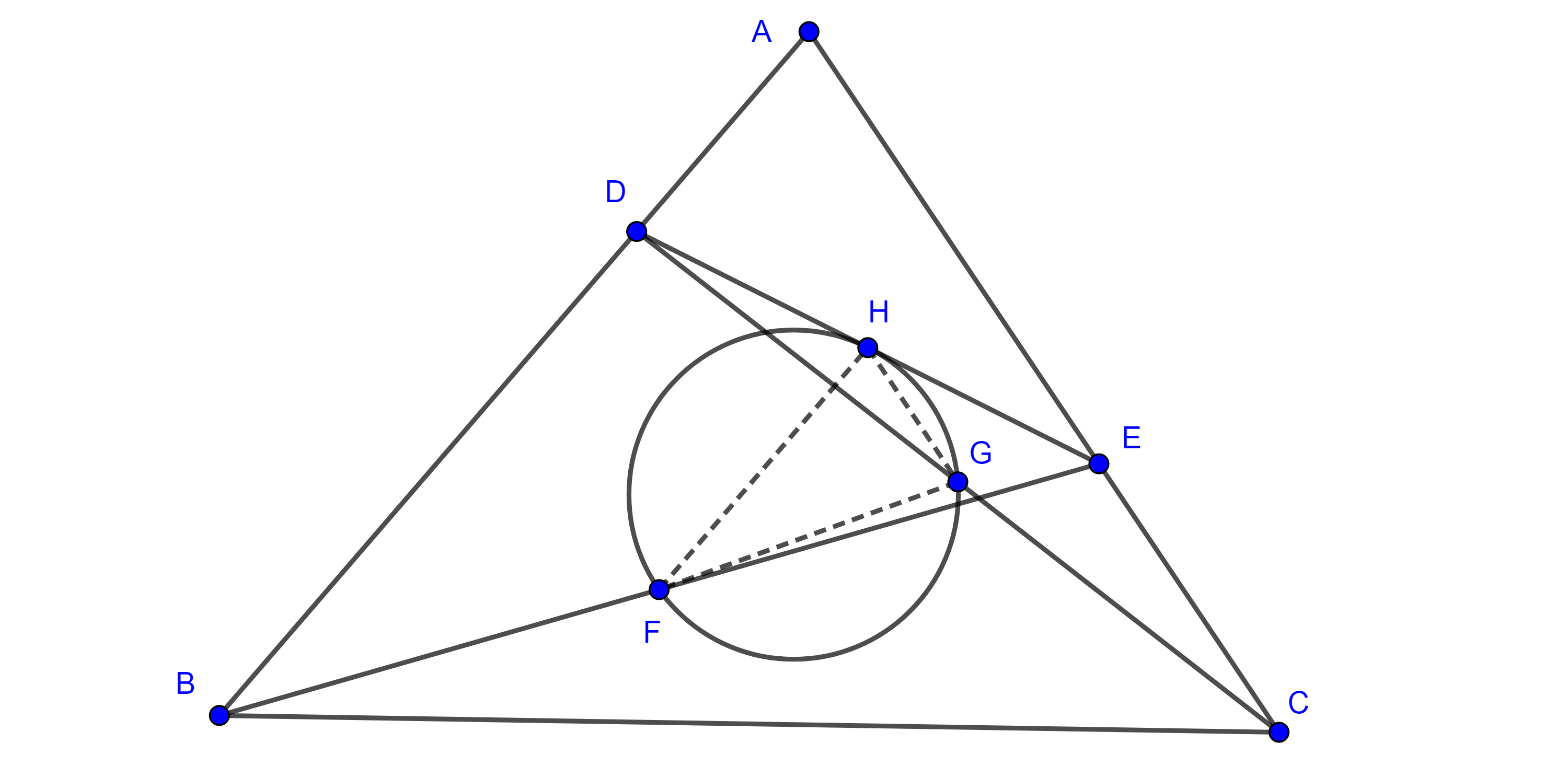
Problema 2. Considera $\triangle ABC$ y $(O, R)$ su circuncírculo, sean $D \in AB$ y $E \in AC$, sean $F$, $G$ y $H$ los puntos medios de $BE$, $CD$ y $DE$ respectivamente, si $DE$ es tangente al circuncírculo de $\triangle FGH$, muestra que $OD = OE$.
Figura 7
Como el ángulo semiinscrito $\angle DHF$ y el ángulo inscrito $\angle HGF$ abarcan el mismo arco, son iguales entre si.
Dado que $HF$ es un segmento medio de $\triangle BDE$ entonces $HF \parallel BD$ y $2HF = BD$ $\Rightarrow \angle DHF = \angle HDA$ $\Rightarrow \angle HGF = \angle HDA$.
De manera análoga podemos ver que $\angle GFH = \angle AED$ y que $HG \parallel EC$ y $2HG = EC$.
Por criterio de semejanza AA, $\triangle FGH \sim \triangle EDA$, entonces $\dfrac{AE}{HF} = \dfrac{AD}{HG}$ $\Rightarrow \dfrac{AE}{\dfrac{BD}{2}} = \dfrac{AD}{\dfrac{EC}{2}}$ $\Rightarrow AE \times EC = AD \times BD$.
Por lo tanto, $D$ y $E$ tienen la misma potencia respecto a el circuncírculo de $\triangle ABC$.
Por la proposición 1, $R^2 – OD^2 = R^2 – OE^2$, $\Rightarrow OD = OE$.
$\blacksquare$
Más adelante…
Para concluir con los temas básicos de geometría de la circunferencia en la siguiente entrada hablaremos sobre el teorema de Ptolomeo que nos da una condición necesaria y suficiente para que un cuadrilátero convexo sea cíclico, este teorema nos ayudara mas adelante a demostrar algunas identidades trigonométricas.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
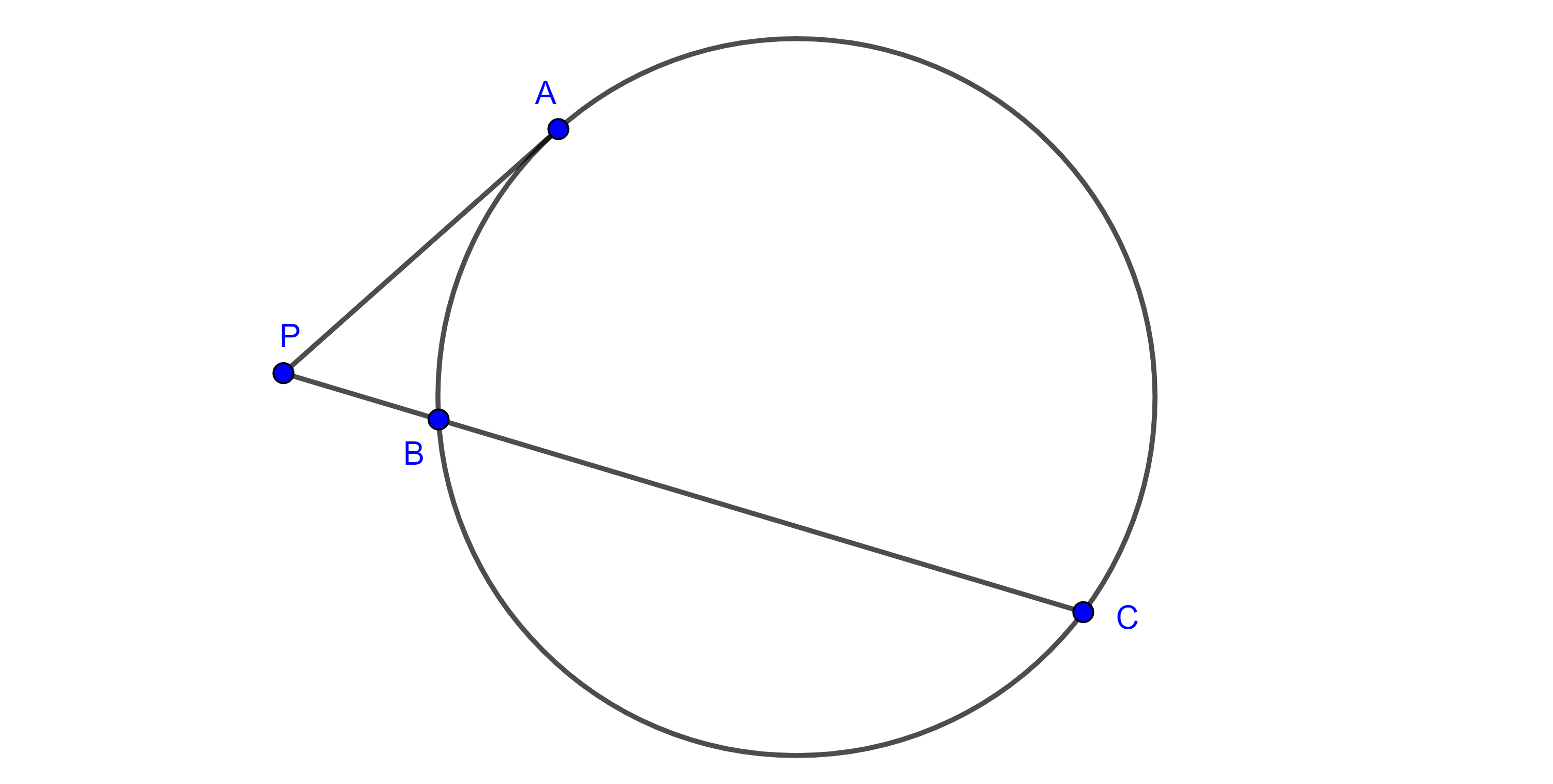
Dos segmentos $PA$ y $BC$ se intersecan en $P$, si $PA^2 = PB \times PC$, muestra que $PA$ es tangente al circuncírculo de $\triangle ABC$ en $A$.
Figura 8
$\triangle ABC$ es un triangulo rectángulo con $\angle A = \dfrac{\pi}{2}$, sea $D \in BC$ el pie de la altura por $A$, considera $\Gamma_1$ el circuncírculo de $\triangle ADC$ y $\Gamma_2$ una circunferencia tangente a $\Gamma_1$ externamente y tangente a $AB$ y $BC$ en $E$ y $F$ respectivamente, muestra que $CE = CF$.
Figura 9
Considera $(O, R)$, $(I, r)$ y $(I_a, r_a)$, el circuncírculo, el incírculo y alguno de los excÍrculos respectivamente de un triangulo, muestra que: $i)$ $OI_a^2 = R(R + 2r_a)$, $ii)$ $II_a^2 = 4R(r_a – r)$.
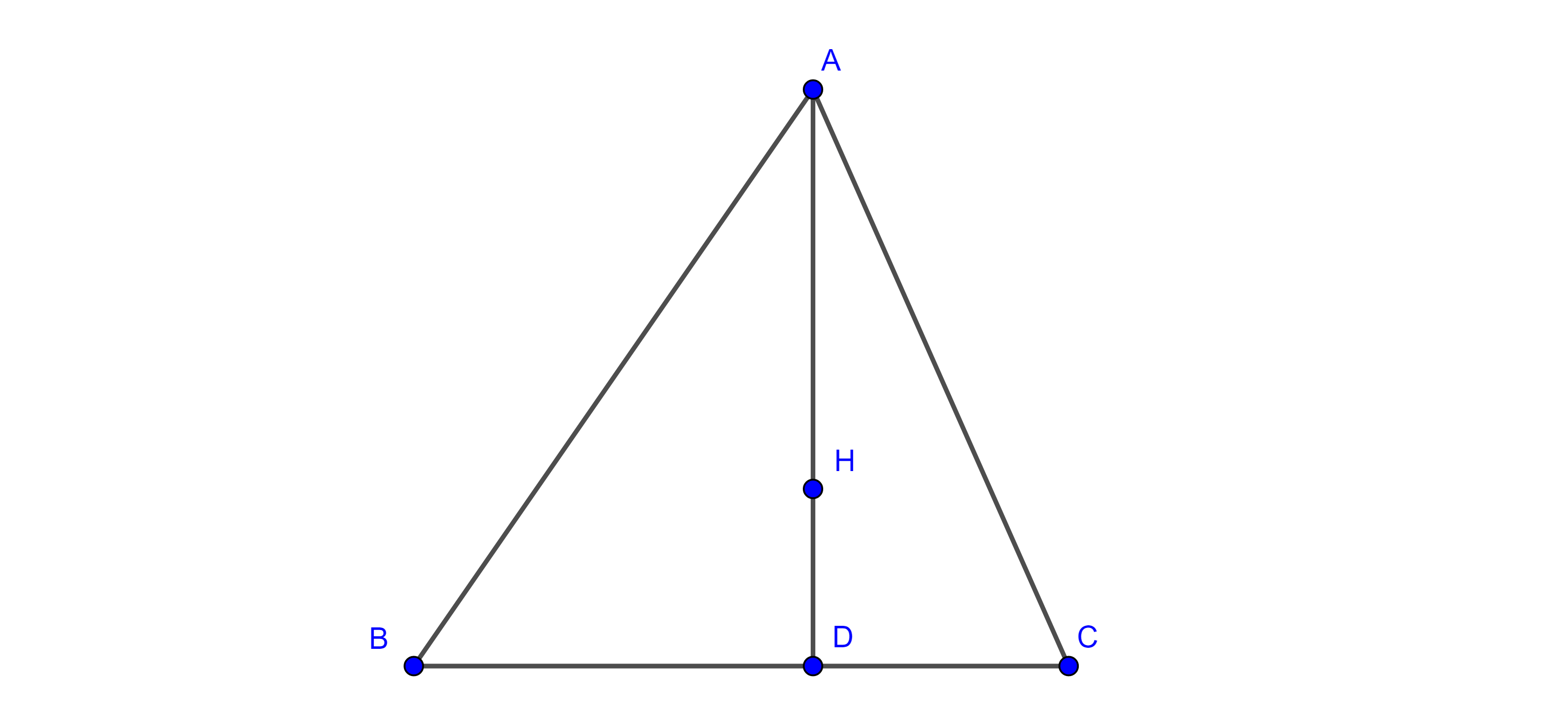
Sean $\triangle ABC$, $D \in BC$ el pie de la altura por $A$ y $H \in AD$. Muestra que $H$ es el ortocentro de $\triangle ABC$ si y solo si $DB \times DC = AD \times HD$.
Figura 10
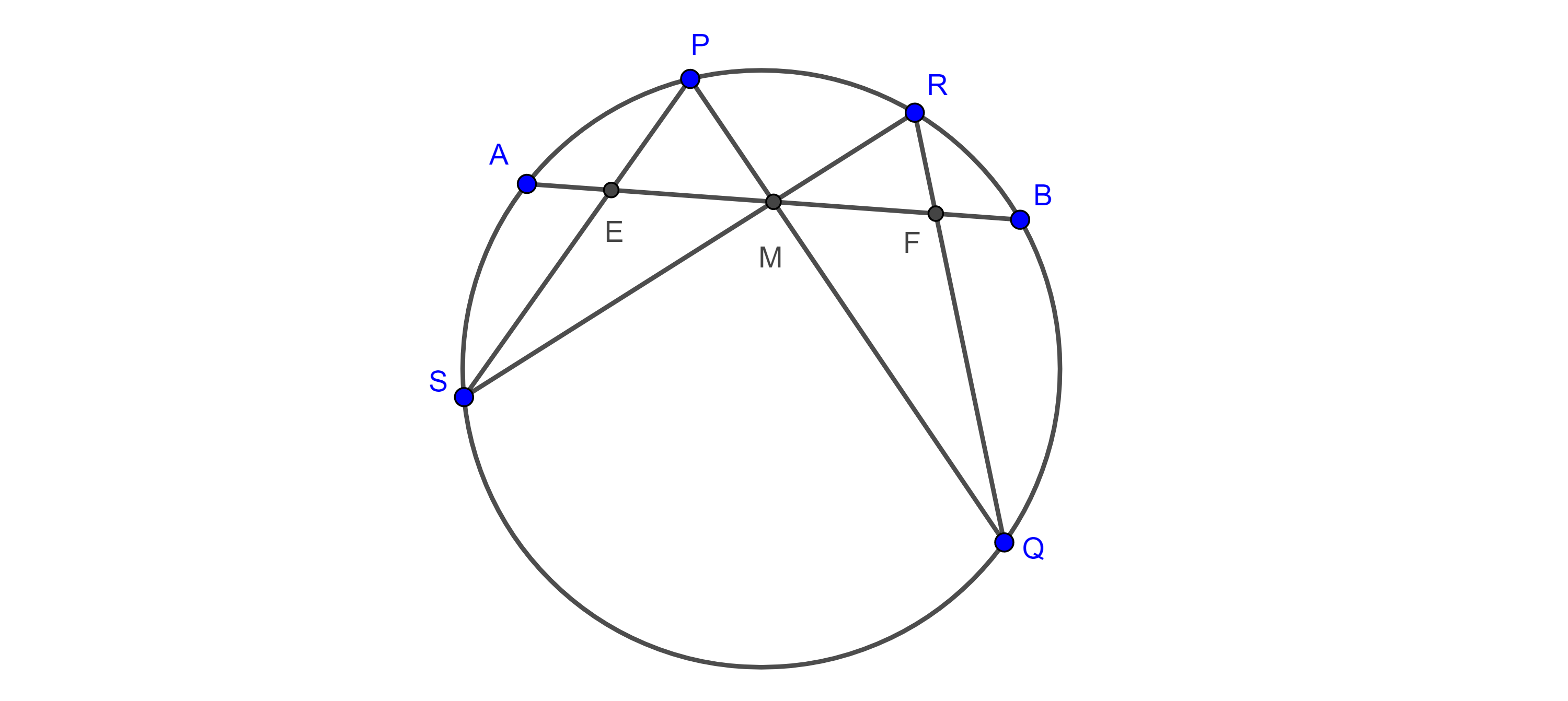
Teorema de la mariposa. Sea $AB$ una cuerda de una circunferencia y $M$ su punto medio. Por $M$ trazamos otras dos cuerdas $PQ$ y $RS$, sean $E = PS \cap AB$ y $F = RQ \cap AB$. Prueba que $M$ es el punto medio de $EF$.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Ya vimos cómo afectan las traslaciones y las transformaciones ortogonales a los polinomios cuadráticos, en esta entrada, usaremos todo lo que hemos aprendido de las entradas anteriores, para dar la clasificación isométrica de las curvas.
Clasificación
Vamos a demostrar, por medio de los siguientes teoremas, que cualquier polinomio cuadrado es isométricamente equivalente a alguna de las nueve posibles familias canónicas que mencionamos en entradas anteriores, cuando clasificamos las curvas.
Debido a que vimos que el polinomio cuadrático $P(x)=x*Ax+2b*x+c$ con $A=A^T\neq 0$, lo podemos componer con una isometría de la forma $g(x)=Bx+h$ con $B\in O(2)$ y obtener una ecuación de la forma:
Entonces, observa que el análisis para esta clasificación, puede partirse en dos grandes casos que dependen del determinante de la matriz, es decir, cuando $det(A)\neq 0$ y cuando $det(A)=0$.
Antes de analizar cada uno de estos casos, veamos un Lema que nos va a ayudar.
Lema 4.14: Si A es una matriz simétrica con valores propios $\alpha$ y $\beta$, entonces $det(A)=\alpha \beta$
Demostración
Sea $B$ una rotación que diagonaliza a $A$, entonces:
Date cuenta que, con las igualdades anteriores, ya podemos dar por concluida la demostración.
Ahora sí podemos analizar cada uno de los casos que mencionamos al inicio.
Caso 1: $det(A)\neq 0$
De aquí, vamos a separar en varios casos, pero empecemos realizando un análisis general. Nombremos como el centro a $h=-A^{-1}b$ y a $B$ como una rotación que diagonalice a $A$. Entonces, observa que $P$ es isométricamente equivalente a un polinomio de la siguiente forma:
A continuación, vamos a encontrar estas equivalencias usando el Lema 4.14.
Caso 1.1 $det(A)>0$
Hay $3$ posibilidades:
$\gamma =0$, entonces la única solución es $(x,y)=(0,0)$
$\gamma$ del mismo signo que $\alpha$ y $\beta$, entonces la curva es vacía porque no hay soluciones reales.
$\gamma$ de signo opuesto que $\alpha$ y $\beta$, entonces, los ceros de $P_1$ coinciden con las soluciones canónicas de la elipse con $a=\sqrt{\frac{-\gamma}{\alpha}}, b=\sqrt{\frac{-\gamma}{\beta}}$ dada por:
$\gamma=0$, entonces $P_1$ es una diferencia de cuadrados que, como $\alpha>0$, entonces $a=sqrt{\alpha}, b=\sqrt{-\beta}$ y puede factorizarse como se muestra a continuación. Además, esto implica que se trata de dos rectas cuya intersección es el centro.
\begin{equation}(ax+by)(ax-by)\end{equation}
$\gamma\neq 0$, entonces, podemos elegir el primer vector propio correspondiente a $x$, de manera que su valor propio $\alpha$ tenga signo contrario a $\gamma$, lo que implica que los ceros de $P_1$ corresponden a las soluciones de la ecuación canónica de la hipérbola que tiene a $a=\sqrt{-\frac{\gamma}{\alpha}}$ y $b=\sqrt{\frac{\gamma}{\beta}}$, cuya ecuación se puede expresar como:
Observa que, en este caso, no tenemos la seguridad de eliminar la parte lineal y que nos conviene simplificar la parte cuadrática. Por el Lema 4.14, uno de los valores propios es cero y el otro es distinto de cero.
Entonces, $P$ es isométricamente equivalente a un polinomio de la forma:
Comprueba que, si hacemos el cambio de variable dado por $x’=x+\alpha$, podemos simplificar el polinomio anterior como:
\begin{equation}P_2(x,y)=x^2+ay+b\end{equation}
Y de nuevo tenemos dos subcasos.
Caso 2.1 $a=0$
$b<0$, entonces, $P_2$ define dos rectas paralelas.
$b=0$, entonces $P_2$ es una recta doble.
$b>0$, entonces $P_2$ consiste en dos rectas imaginarias.
Caso 2.2 $a\neq 0$
SI hacemos el cambio de variable $y’=y+\frac{b}{a}$, tenemos que $P$ es isométricamente equivalente al polinomio:
\begin{equation}x^2+ay\end{equation}
Que define una parábola.
Tarea moral
Encuentra un polinomio que defina las siguientes curvas cuadráticas:
La hipérbola con semieje principal $4$ en la dirección $(2,1)$, semieje secundario $1$ y centro en $(2,3)$.
La elipse con semieje mayor $3$ en la dirección $(3,4)$, semieje menor $2$ y centro en $(-1,2)$.
Describe geométricamente las siguientes curvas cuadráticas que están definidas por los siguientes polinomios, además, da su centro la dirección de los ejes y los parámetros o la ecuación canónica correspondiente:
$9x^2-4xy+6y^2-58x+24y+59$
$66x^2-24xy+59y^2-108x-94y+1$
$-7x^2+48xy+7y^2+158x-6y-88$
$32x^2+48xy+18y^2+31x-8y-88$
Más adelante…
En la última sección de esta unidad, veremos otra forma de clasificar las curvas, que es mediante la semejanza de curvas cuadráticas.
Anteriormente, estudiamos los vectores y valores propios de las matrices simétricas, en esta entrada vamos a usar que ya sabemos muchas cosas sobre el comportamiento respecto al producto interior, para hablar sobre la diagonalización ortogonal de matrices simétricas, cuyo procedimiento inicia resolviendo su polinomio característico.
Teoremas importantes
Antes de ver el proceso para la diagonalización ortogonal de matrices simétricas, vamos a enunciar un lema y un teorema que van a justificar la «receta» a seguir para esta diagonalización.
Lema 4.12: Considera una matriz simétrica $A$. Si $\lambda_1, u$ y $\lambda_2, v$, son pares propios de $A$ con $\lambda_1\neq \lambda_2$, entonces $u$ y $v$ son ortogonales.
Esto implica que $(\lambda_1 – \lambda_2)(u\cdot v)=0$
Y $\lambda_1\neq \lambda_2$, entonces $u\cdot v$=0.
Con lo que hemos terminado la demostración.
Teorema 4.13: Considera una matriz simétrica de $2×2$, $A$. Entonces existe una rotación $B\in O(2)$ tal que $B^TAB$ es diagonal de la siguiente forma:
Con $\lambda_1$ y $\lambda_2$, los valores propios de $A$.
Demostración
Por las entradas anteriores, las siguientes implicaciones son ciertas, puedes comprobarlo tú mismo con facilidad.
Como $A$ es simétrica de $2×2$, entonces $A$ tiene valores propios $\lambda_1, \lambda_2 \in \mathbb R$.
Caso 1 $\lambda_1=\lambda_2$
Entonces $A$ es diagonal y puede tomarse a $B$ como la matriz identidad que es rotación en $O(2)$.
Caso 2$\lambda_1\neq \lambda_2$
Consideramos a $u, v$, los vectores propios correspondientes a $\lambda_1$ y $\lambda_2$. Observa que $u$ es diferente al vector cero.
Sabemos que $u$ y $v$ son ortogonales, entonces $v$ es paralelo a $u^T$ que también es vector propio correspondiente a $\lambda_2$.
Considera $B=\frac{1}{|u|} (u, u^T)$, donde se puede comprobar fácilmente que $B$ es la matriz de una rotación y que cumple que $B^TAB$ es diagonal.
«Receta»
Ingredientes
Una matriz simétrica $A=A^T$ de $2×2$
Procedimiento
Resolver su polinomio característico con $det(A-\lambda I)$.
Encontrar $u\neq 0$ tal que $(A-\lambda_1 I)u=0$.
Declarar $B=\frac{1}{|u|} (u, u^T)$.
La matriz diagonal, con entradas $\lambda_1$ y $\lambda_2$, estará dada por $B^TAB$.
Tarea moral
Termina de escribir la demostración del Teorema 4.13.
Demuestra que, si una matriz $A$ cualquiera, tiene dos valores propios distintos, entonces existe una matriz $B\in Gl(2)$ tal que $B^{-1}AB$ es diagonal.
Encuentra la matriz $B$ de una rotación que diagonalice las siguientes matrices simétricas: Además, calcula $B^TAB$:
Mucho hemos hablado, a lo largo de las entradas anteriores, sobre las soluciones de las ecuaciones resultantes de la forma $det(A-I\lambda)=0$ con $A$ matriz y $x$ vector; sin embargo, aún no nos hemos dedicado a resolver este tipo de ecuaciones. En esta entrada, hablaremos de las soluciones de estas ecuaciones que se llaman valores propios y que tienen un vector propio asociado.
¿Qué son?
Si tienes una matriz cuadrada $A$, vamos a decir que un vector $v$ es vector propio de $A$ con valor propio $\lambda \in \mathbb R$, si $v\neq 0$ y $Av=\lambda v$. A la pareja $\lambda , v$, la vamos a llamar pareja propia de A y el principal problema de estudio de esta entrada será encontrar a estas parejas.
Implicaciones importantes
Lema 4.7: Si $u$ y $v$ son vectores propios de $A$ con el mismo valor $\lambda \in \mathbb R$, entonces cualquier combinación lineal no trivial de ellos también es vector propio de $A$.
Demostración
Si tenemos dos parejas de $A$, $u$, $v$ que cumplen $Au=\lambda u$ y $Av=\lambda v$, entonces, para cualquier par de coeficientes $\alpha, \beta \in \mathbb R$ se tiene que, la combinación lineal de $u$ y $v$ con estos vectores, se cumple:
Lo que significa que, si $\alpha u+ \beta v\neq 0$, entonces es vector propio de $A$ con valor propio $\lambda$.
Con lo que hemos terminado la demostración.
El siguiente lema es muy importante para realizar los cálculos.
Lema 4.8: Para cualquier matriz A cuadrada, se cumple: $\lambda$ es un valor propio de $A$ si y solo si, $det(A-\lambda I)=0$
Demostración
Sabemos que, como $\lambda$ es valor propio de $A$, entonces tiene a su vector propio $v$ correspondiente que cumple que: $Av=\lambda v$.
$\Longleftrightarrow Av-\lambda v=0$
$\Longleftrightarrow (A-\lambda I)v=0$
Y, como $v\neq 0$, entonces:
$\Longleftrightarrow det(A-\lambda I)=0$
Fin de la demostración.
Observa que, con los conocimientos que tenemos hasta el momento, ya puedes demostrar fácilmente el siguiente Lema y Corolario.
Lema 4.9: Si A es una matriz simétrica de $2×2$, entonces $A$ tiene dos valores propios $\lambda_1$ y $\lambda_2$ en $\mathbb R$.
Corolario 4.10: Sea $A$ una matriz simétrica de $2×2$, con valores propios $\lambda_1$ y $\lambda_2$. Entonces, sus valores propios coinciden ($\lambda_1 =\lambda_2$) si y solo si, $A= \lambda_1 I$. En este caso, cualquier vector $v\neq 0$ es vector propio.
Corolario 4.11: Considera una matriz simétrica $A$ de $2×2$. Entonces, existe una base $u, v \in \mathbb R^2$, donde $u$ y $v$ son vectores propios de $A$.
Demostración
Por el Lema 4.9, sabemos que $A$ tiene dos valores propios $\lambda_1$ y $\lambda_2$.
Caso 1, $\lambda_1=\lambda_2$
Por el Corolario 4.10, cualquier base $u,v \in \mathbb R^2$ funciona.
Caso 2, $\lambda_1\neq \lambda_2$
Por la definición de valor propio, existen $u,v$, vectores distintos de $0$ que corresponden a los valores propios $\lambda_1$ y $\lambda_2$ respectivamente.
Estos vectores no pueden ser paralelos porque por el Lema 4.8, esto implicaría que $\lambda_1=\lambda_2$.
Entonces, $u$ y $v$ forman una base de $\mathbb R^2$.
Terminamos la demostración.
Ejemplo
Calculemos los valores y vectores propios de la siguiente matriz simétrica:
Para resolver el polinomio anterior, debemos igualarlo a $0$, de donde vamos a obtener que, las raíces del polinomio son: $\lambda_1=\frac{1+\sqrt{1+24}}{2}=3$ y $\lambda_2=\frac{1-5}{2}=-2$
Vectores propios
Para encontrar los vectores propios correspondientes a $\lambda_1$ y $\lambda_2$, debemos encontrar una solución no trivial para los sistemas $(A-\lambda_i I)x=0$ con $i=1,2$
Donde, una de sus soluciones no triviales es $v^T=(-1,2)$
Observa que estos vectores $u$ y $v$ son ortogonales, ¿será coincidencia? Lo veremos más adelante.
Tarea moral
Comprueba que, para los vectores propios obtenidos en los sistemas de ecuaciones $(6)$ y $(7)$, se cumple que $Au=3u$ y que $Av=-2v$.
Demuestra, con un argumento algebraico y uno geométrico, que la matriz \begin{equation}\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\end{equation} no tiene vectores propios.
Demuestra que la matriz \begin{equation}\begin{pmatrix} a & -b \\ b & a \end{pmatrix}\end{equation} no tiene vectores propios para $b\neq0$.
Usa el Lema 4.9 para demostrar el Corolario 4.10.
Demuestra el Lema 4.9. Hint: usa que, al ser $A$ matriz simétrica, entonces $A=A^T$, después, expresa a $A$ de la siguiente forma y desarrolla:
\begin{equation}A=\begin{pmatrix} a & b \\ b & c\end{pmatrix} \end{equation}
Más adelante…
En la siguiente entrada, concluiremos nuestro estudio de los valores y vectores propios, analizando la diagonalización ortogonal de matrices simétricas.