
Introducción
En esta entrada veremos un par de tipos de funciones muy particulares: las exponenciales y las logarítmicas. Probablemente en alguno de tus cursos anteriores te encontraste con funciones del tipo:
\begin{align*}
f(x)&= 3^{x} & g(x)&= ln(x)\\
\end{align*}
Aquí veremos su representación gráfica, ejercicios relacionados y algunos resultados importantes, como las leyes de los exponentes y de los logaritmos. Se profundizará más en este conjunto de funciones en el curso de Cálculo Diferencial e Integral II.
Funciones exponenciales
Definición (función exponencial): Sea $f$ una función. Decimos que $f$ es una función exponencial si está definida como:
$$f: \r \rightarrow (0, \infty)$$
$$f(x)=a^{x}$$
con $a \in {\r}$ y $a>0$.
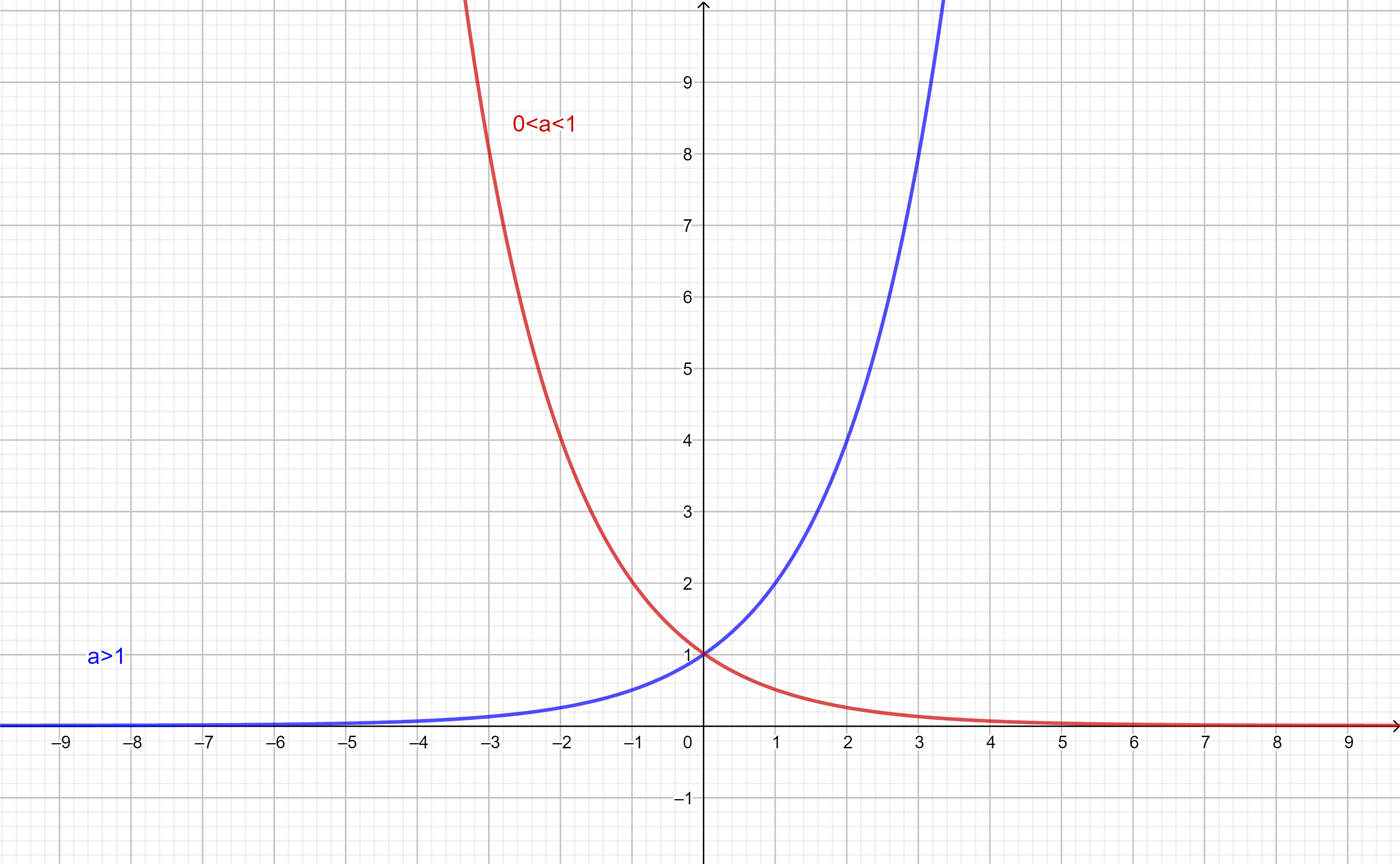
En este tipo de funciones tenemos que la variable $x$ está como exponente.
Observemos que tenemos los siguientes casos:
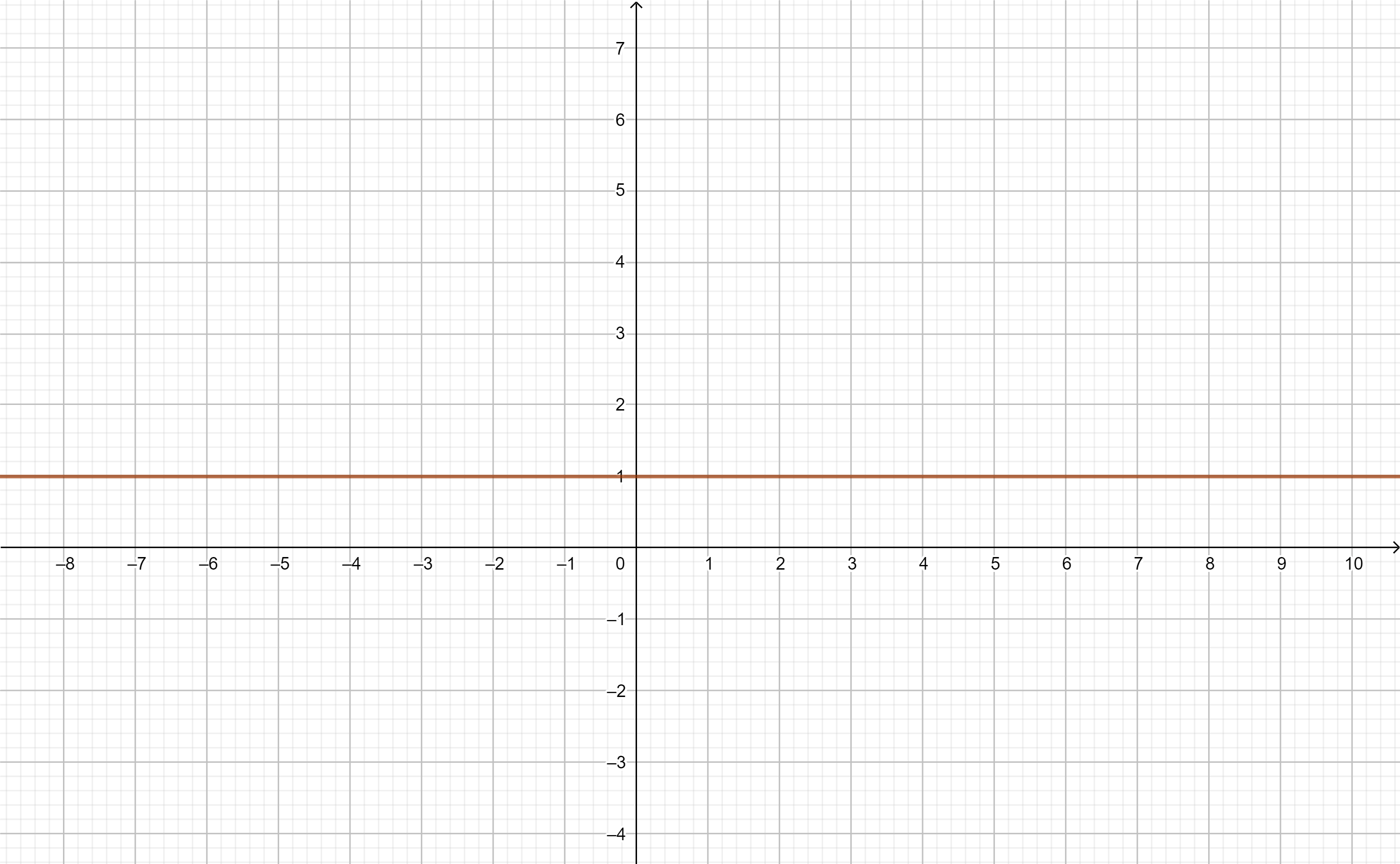
Veamos que al tomar $a=1$ tenemos que su gráfica se vería:
$$f(x)=1^{x}$$
Leyes de los exponentes
Teorema (Leyes de los exponentes): Consideremos a $a, m, n \in \r$ y $a>0$. Vemos que se cumplen las siguientes propiedades:
- $a^{m}a^{n}=a^{m+n}$
- $(a^{n})^{m}=a^{(n\cdot m)}$
- $a^{0}=1$
- $a^{-1}=\frac{1}{a}$
- $a^{-n}=\frac{1}{a^{n}}$
- $a^{n-m}=\frac{a^{n}}{a^{m}}$
- $a^{\frac{1}{q}}=\sqrt[q]{a}$
- $a^{\frac{p}{q}}=\sqrt[q]{a^{p}}$
Por el momento no daremos las pruebas pertinentes, ya que las herramientas necesarias se verán durante el próximo curso de cálculo. Así pasaremos a revisar otros resultados relacionados a las funciones exponenciales.
Otros resultados sobre funciones exponenciales
Proposición: Consideremos $a>0$ y $r=\frac{p}{q} \in \mathbb{Q}$.
- Si $a>1$ y $r>0$ entonces $a^{r}>1$
- Si $0<a<1$ y $r>0$ entonces $a^{r}<1$
- Si $a>1$ y $r<0$ entonces $a^{r}<1$
- Si $0<a<1$ y $r<0$ entonces $a^{r}>1$
Demostración:
- Como $a>1$ se sigue que:
\begin{align*}
a>1 &\Rightarrow \sqrt[q]{a}>\sqrt[q]{1}\\
&\Rightarrow (\sqrt[q]{a})^{p}>(\sqrt[q]{1})^{p}\\
&\Rightarrow a^{\frac{p}{q}}>1\\
&\Rightarrow a^{r}>1
\end{align*} - Ahora tenemos que $0<a<1$:
\begin{align*}
&\Rightarrow \sqrt[q]{a}< \sqrt[q]{1}\\
&\Rightarrow (\sqrt[q]{a})^{p}<(\sqrt[q]{1})^{p}\\
&\Rightarrow a^{r}<1
\end{align*} - Tarea moral
- Ya que $0<a<1$ observamos que:
$$1< \frac{1}{a}$$
Adicionalmente como $r<0$ se sigue:
\begin{align*}
&\Rightarrow \left(\frac{1}{a}\right)^{r}<1\\
&\Rightarrow (a^{-1})^{r}<1\\
&\Rightarrow a^{-r}<1\\
&\Rightarrow \frac{1}{a^{r}}<1\\
&\Rightarrow 1<a^{r}
\end{align*}
$\square$
Teorema: Sea $f: A \subseteq \r \rightarrow \r$.
- Si $f$ es una función creciente $\Rightarrow f$ es inyectiva.
- Si $f$ es una función decreciente $\Rightarrow f$ es inyectiva.
Demostración de 1:
Tomemos $x_{1},x_{2} \in A$ tales que $x_{1} \neq x_{2}$ por lo que tenemos los siguientes casos:
Caso 1: Si $x_{1}>x_{2}$ entonces al aplicar la función $f$ tenemos
$$f(x_{1})>f(x_{2}).$$
Por lo que:
$$f(x_{1}) \neq f(x_{2}).$$
Caso 2: Ahora si $x_{1}<x_{2}$ y aplicamos la función $f$
$$f(x_{1})< f(x_{2}).$$
Así:
$$f(x_{1}) \neq f(x_{2}).$$
De los casos anteriores concluimos que $f$ es inyectiva.
$\square$
Afirmación: Si tenemos $a>0$ y $f: \r \rightarrow \r^{+}$
$$f(x)=a^{x}$$
- Si $a>1$ entonces $f$ es creciente.
- Si $0<a<1$ entonces $f$ es decreciente.
Demostración:
- Si $a>1$ y tomamos $x<y$ entonces $y-x>0$
\begin{align*}
&\Rightarrow a^{y-x}>1\\
&\Rightarrow \frac{a^{y}}{a^{x}}>1\\
&\Rightarrow a^{y}>a^{x}
\end{align*} - En cambio si $0<a<1$ y ahora consideramos $x<y$. Queremos probar que:
$f(x)>f(y)$
\begin{align*}
x<y &\Rightarrow y-x>0\\
&\Rightarrow a^{y-x}<1\\
&\Rightarrow \frac{a^{y}}{a^{x}}<1\\
&\Rightarrow a^{y}< a^{x}\\
&\Rightarrow f(y)<f(x)
\end{align*}
$\square$
Observación: Si $a>0$ y $a \neq 1$ entonces $f(x)=a^{x}$ es inyectiva.
Observación: $f(x)=a^{x}$ es sobreyectiva.
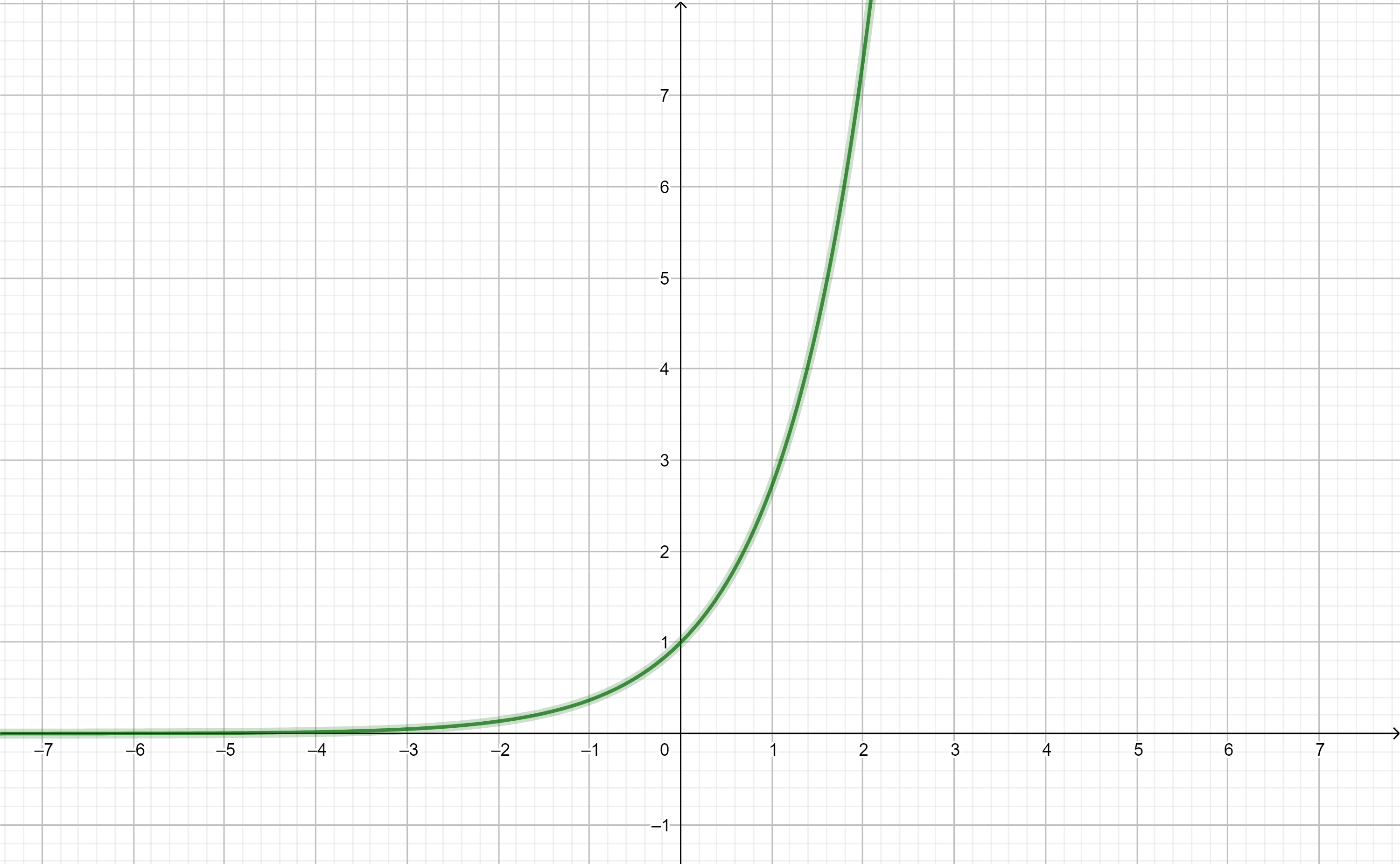
Ahora hablemos del número $e$
Si consideramos $a= e$ donde:
$$e=2.718282 \ldots$$
que es llamado el número de Euler.
Obtenemos la función:
$$f(x)=e^{x},$$
llamada función exponencial, ésta es quizá las más conocida de este tipo de funciones.
Su gráfica se ve del siguiente modo:
¿Y su función inversa?
Si tomas la función $f(x)=a^{x}$, la función identidad y reflejamos su gráfica, obtenemos que $f^{-1}$ se ve como:

Observamos que $f^{-1}$ esta definida como:
$$f^{-1}: (0, \infty) \rightarrow \r$$
que vemos también cumple ser inyectiva.
A $f^{-1}(x)$ la denotaremos por:
$$f^{-1}(x)= log_{a}(x).$$
Funciones logarítmicas
Definición (función logarítmica): Sea $g$ una función en los reales. Decimos que $g$ es una función logarítmica si:
$$g: (0, \infty) \rightarrow \r$$
$$g(x)=log_{a}(x)$$
donde $log_{a}(x)$ se lee como logaritmo base $a$ de $x$.
Notación:
- Si tomamos $a=e$:
$$log_{e}(x):= ln(x)$$
llamado logaritmo natural de $x$. - Si tomamos $a=10$ escribiremos:
$$log_{10}(x):= log(x)$$
Leyes de los logaritmos
Teorema (Leyes de los logaritmos): Sean $a \in (0, \infty)$ con $a\neq 1$, $x,y \in (0, \infty)$ y $r \in \r$. Tenemos que se cumplen las siguientes igualdades:
- $log_{a}(x \cdot y)=log_{a}(x)+log_{b}(y)$
- $r log_{a}(x)= log_{a}(x^{r})$
- $log_{a}(\frac{x}{y})= log_{a}(x)- log_{a}(y)$
Demostración:
Tomemos $log_{a}(x)=z $ y $log_{a}(y)=w$ y notemos que:
\begin{align*}
a^{z}&= x & a^{w}&=y
\end{align*}
- Para este punto consideremos el producto de $x$ con $y$:
\begin{align*}
x \cdot y &= a^{z}\cdot a^{w}\\
&= a^{z+w}
\end{align*}
Así sustituyendo al logaritmo del producto tenemos:
\begin{align*}
log_{a}(x \cdot y)&= log_{a}(a^{z+w})\\
&= z+w\\
&=log_{a}(x)+ log_{a}(y)
\end{align*} - Ahora si elevamos $a^{z}=x$ a la $r$ obtenemos:
$$(a^{z})^{r}= x^{r} \Rightarrow a^{rz}=x^{r}$$
Tomando el $log_{a}(x^{r})$ se sigue:
\begin{align*}
log_{a}(x^{r})&= log_{a}(a^{rz})\\
&= rz\\
&=r log_{a}(x)
\end{align*} - Por último veamos que:
$$x=\frac{x}{y}\cdot y$$
Tomando lo anterior y aplicando logaritmo:
\begin{align*}
log_{a}(x)&= log_{a}\left(\frac{x}{y}\cdot y \right)\\
&= log_{a}\left(\frac{x}{y }\right)+ log_{a}(y)
\end{align*}
Reacomodando obtenemos:
$$log_{a} \left(\frac{x}{y}\right)= log_{a}(x)- log_{a}(y)$$
$\square$
Cambio de base de logaritmos
Proposición (Cambio de base): Consideremos $a,b \in (0, \infty)$ donde $a\neq 1, b \neq 1$, $x \in \r$ y $y>0$. Se cumplen las siguientes propiedades:
- $a^{x}=b^{x log_{b}(a)}$
- $log_{a}(y)=\frac{log_{b}(y)}{log_{b}(a)}$
Demostración:
- Si aplicamos la segunda ley de los logaritmos en la siguiente igualdad y simplificamos tenemos:
\begin{align*}
b^{x log_{b}(a)}&= b^{log_{b}(a^{x})}\\
&= a^{x}.
\end{align*} - Como $y>0$ entonces podemos considerar $x=log_{a}(y)$. Así sustituyendo en el punto 1:
\begin{align*}
a^{log_{a}(y)}&= b^{log_{a}(y)log_{b}(a)}.
\end{align*}
De lo anterior tenemos:
$$y=b^{log_{a}(y)log_{b}(a)}.$$
Tomando el logaritmo base $b$ en ambos lados de la igualdad:
\begin{align*}
log_{b}(y)&= log_{b}(b^{log_{a}(y)log_{b}(a)})\\
&= log_{a}(y)\cdot log_{b}(a)
\end{align*}
$$\therefore \quad log_{a}(y)=\frac{log_{b}(y)}{log_{b}(a)}.$$
$\square$
Ejercicio
Resuelve la ecuación:
\begin{equation*}
log_{4}(log_{3}(log_{2}(x)))=0.
\end{equation*}
Solución:
Comenzaremos realizando un cambio de variable considerando:
$$\beta =log_{3}(log_{2}(x)).$$
Por lo que tendríamos:
\begin{equation*}
log_{4}(\beta)=0.
\end{equation*}
Lo anterior implica que:
\begin{equation*}
4^{log_{4}(\beta)}=4^{0}=1.
\end{equation*}
$$\therefore \beta = 1$$
$$\therefore log_{3}(log_{2}(x))=1$$
Procedemos con un razonamiento similar para $log_{3}(log_{2}(x))=1$:
\begin{equation*}
3^{log_{3}(log_{2}(x))}=3^{1}=3.
\end{equation*}
Por lo que concluimos:
$$log_{2}(x)=3.$$
Finalmente, de $log_{2}(x)=3$ obtenemos:
\begin{equation*}
2^{log_{2}(x)}=2^{3}=8.
\end{equation*}
Así tenemos que el valor para $x$ sería:
$$x=8.$$
Realizando la comprobación vemos que se cumple:
\begin{align*}
log_{4}(log_{3}(log_{2}(x)))&=log_{4}(log_{3}(log_{2}(8)))\\
&=log_{4}(log_{3}(3))\\
&=log_{4}(1)\\
&=0
\end{align*}
$$\therefore log_{4}(log_{3}(log_{2}(x)))=0.$$
Más adelante
Ahora que hemos terminado la unidad de funciones, en la próxima entrada comenzaremos con la unidad dedicada al estudio de un tipo especial de funciones: las sucesiones de números reales. Encontrarás una introducción intuitiva sobre el concepto de sucesión para luego pasar a su definición formal y una serie de ejemplos.
Tarea moral
- Demuestra el punto 3 de la Proposición.
- Grafica las siguientes funciones:
- $f(x)=ln(x-2)$
- $f(x)=1-e^{x}$
- Demuestra que dado $a \in (0, \infty)- \left\{1 \right\}$:
\begin{equation*}
log_{\frac{1}{a}}(x)=-log_{a}(x)
\end{equation*} - Resuelve los siguientes ejercicios:
- $log_{2}(log_{3}(log_{2}(x)))=1$
- $log_{16}(x)+log_{4}(x)+log_{2}(x)=7$
Entradas relacionadas
- Ir a: Cálculo Diferencial e Integral I
- Entrada anterior del curso: Cálculo Diferencial e Integral I: Funciones trigonométricas (Parte 2)
- Entrada siguiente del curso: Cálculo Diferencial e Integral I: Sucesiones de números reales.
- Resto de cursos: Cursos
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»