Introducción
En esta entrada estudiamos la concurrencia de rectas importantes en el triangulo, a saber, las medianas, mediatrices, bisectrices y alturas. Mencionamos también consecuencias inmediatas de los puntos de concurrencia.
Centroide
Teorema 1. Las medianas de todo triángulo concurren en un punto que las triseca.
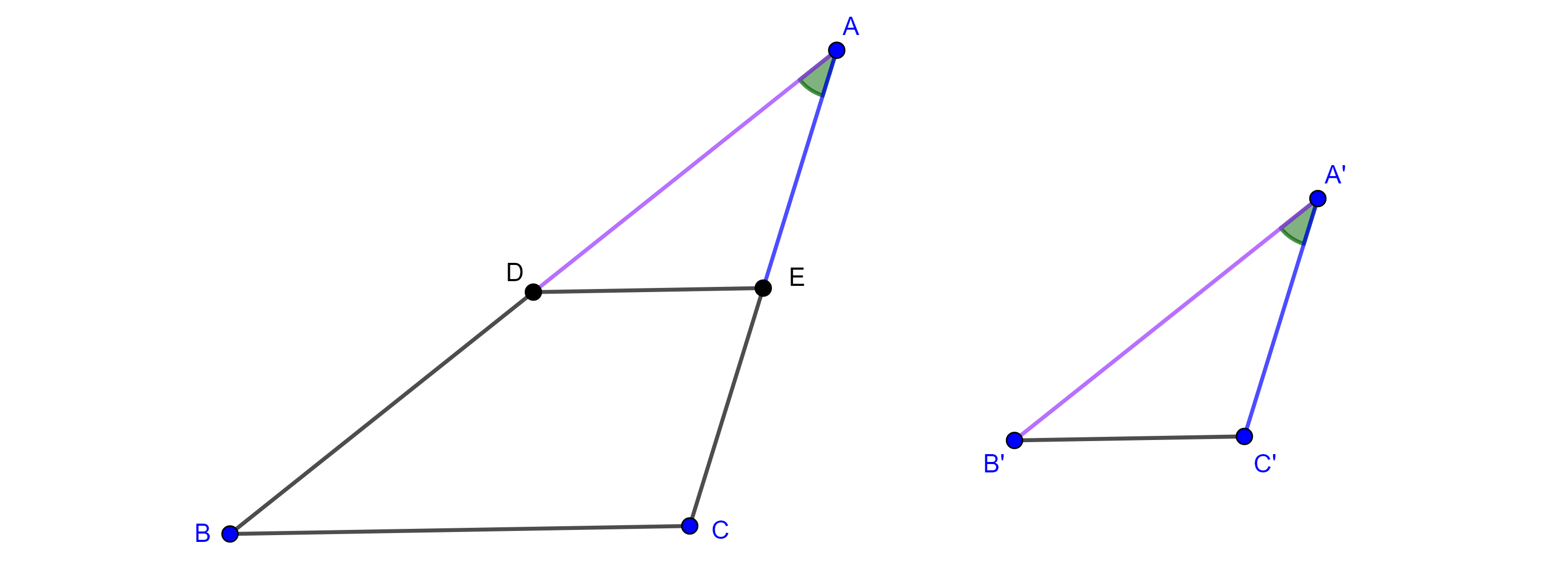
Demostración. Sean $\triangle ABC$, $B’$ y $C’$ los puntos medios de $AC$ y $AB$ respectivamente, por el teorema del segmento medio sabemos que $C’B’ = \dfrac{BC}{2}$ y $C’B’ \parallel BC$.
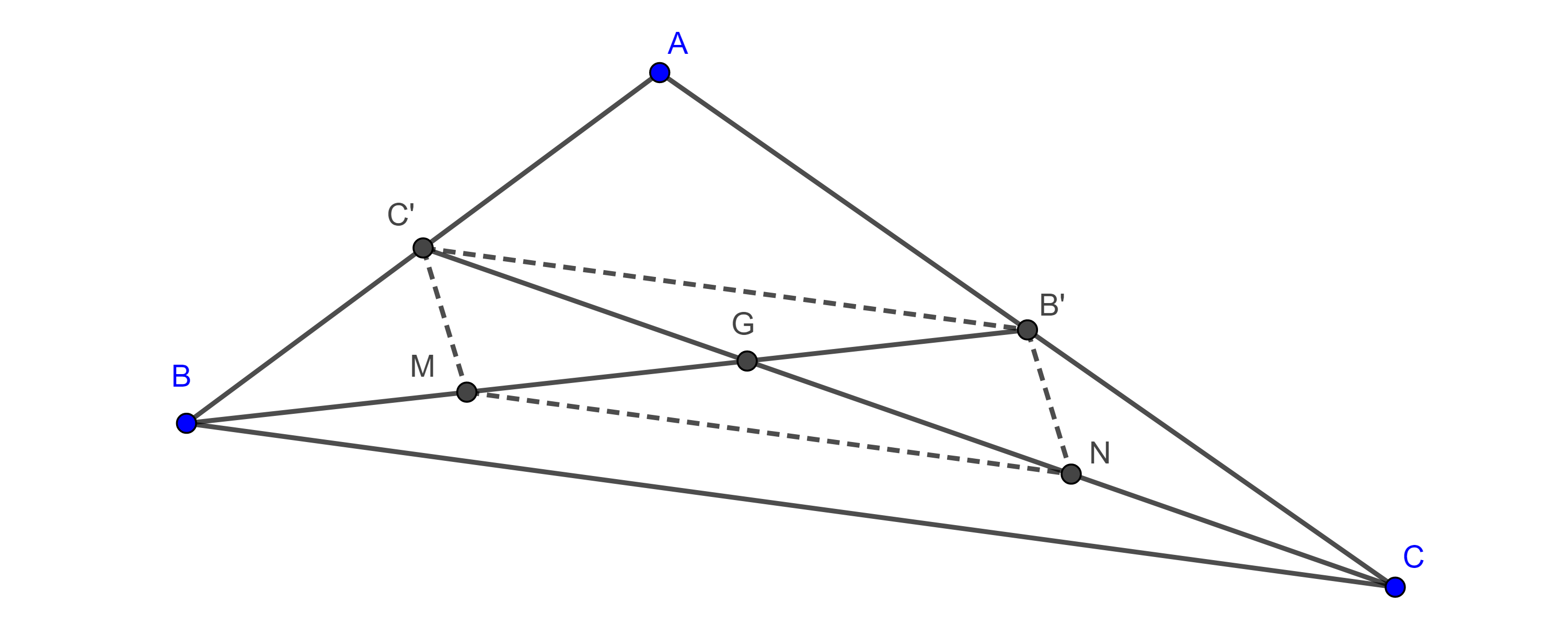
Sea $G$ la intersección de las medianas $BB’$ y $CC’$, en $\triangle GBC$ consideremos $M$ y $N$ los puntos medios de los lados $GB$ y $GC$ respectivamente, entonces
$MN = \dfrac{BC}{2}$ y $MN \parallel BC$.
Por transitividad $C’B’ = MN$ y $C’B’ \parallel MN$, esto implica que $\square C’MNB’$ es un paralelogramo y por lo tanto sus diagonales se bisecan, es decir,
$C’G = GN$ y $MG = GB’$.
Por construcción, $MG = BM$ y $GN = NC$
$\Rightarrow GB’= \dfrac{BB’}{3}$ y $C’G = \dfrac{CC’}{3}$,
esto es, la medianas $BB’$ y $CC’$ se trisecan
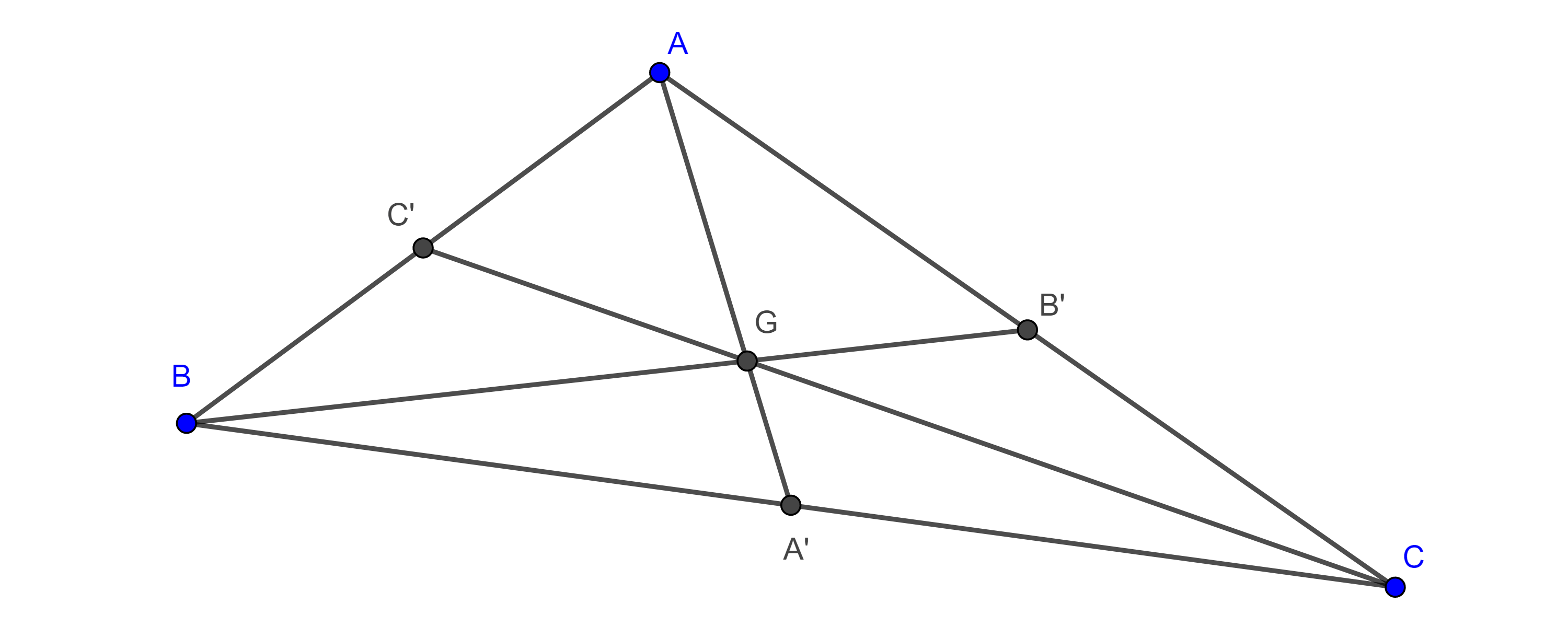
Si repetimos el mismo procedimiento pero ahora con las medianas $AA’$ y $BB’$ encontraremos un punto $G’$ en donde las medianas se trisecaran, $G’B’= \dfrac{BB’}{3}$ y $G’A’ = \dfrac{AA’}{3}$.
Como $GB’= \dfrac{BB’}{3} = G’B’$, concluimos que $G’ = G$.
Por lo tanto, las medianas de un triángulo concurren en un punto que las triseca.
$\blacksquare$
Definición 1. Decimos que el punto en que concurren las medianas de un triángulo es el gravicentro, baricentro o centroide del triángulo y lo denotamos con la letra $G$ mayúscula.
Circuncentro
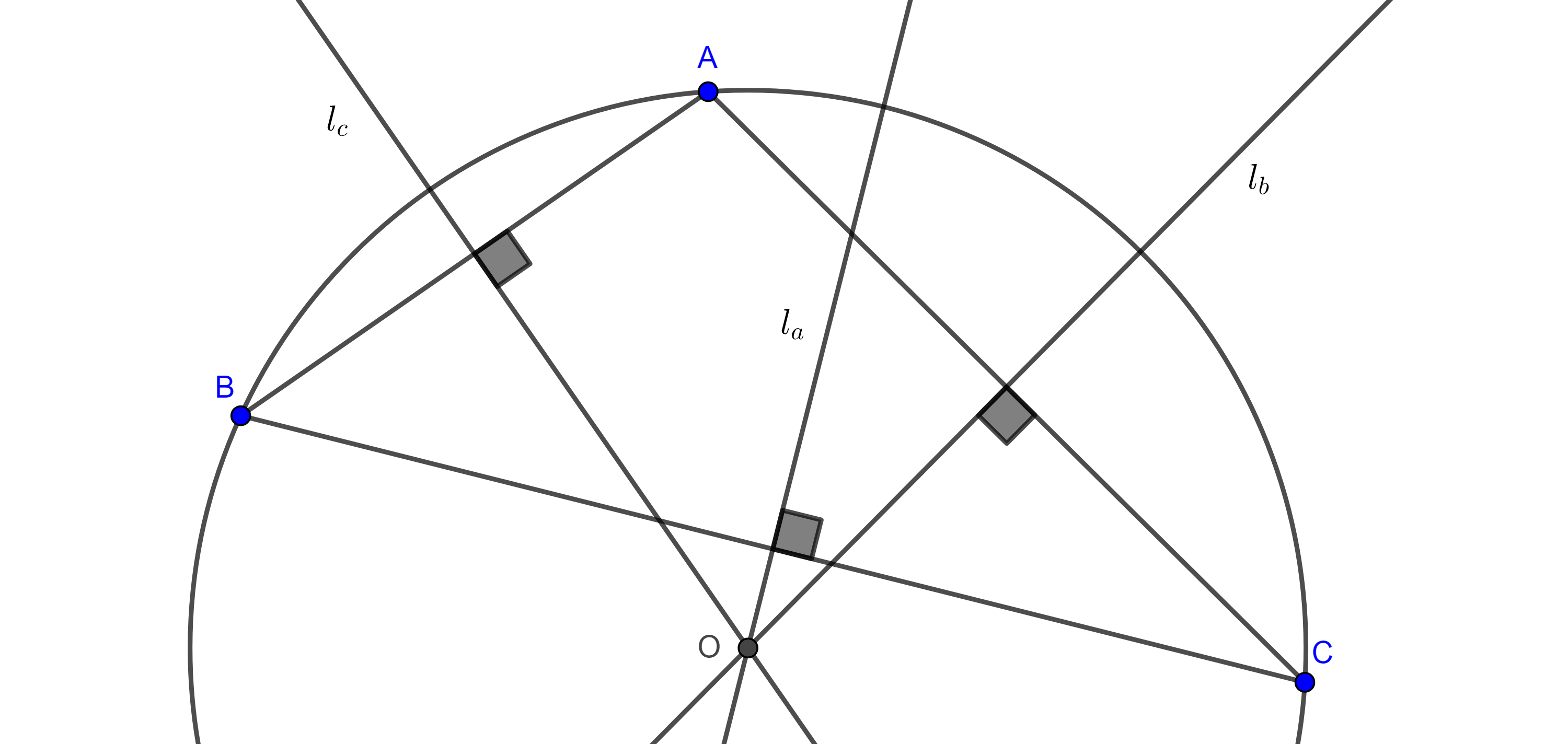
Teorema 2. Las mediatrices de los lados de todo triángulo son concurrentes.
Demostración. Sea $\triangle ABC$, consideremos las mediatrices $l_c$ y $l_b$ de $AB$ y $AC$ respectivamente y $O = l_b \cap l_c$.
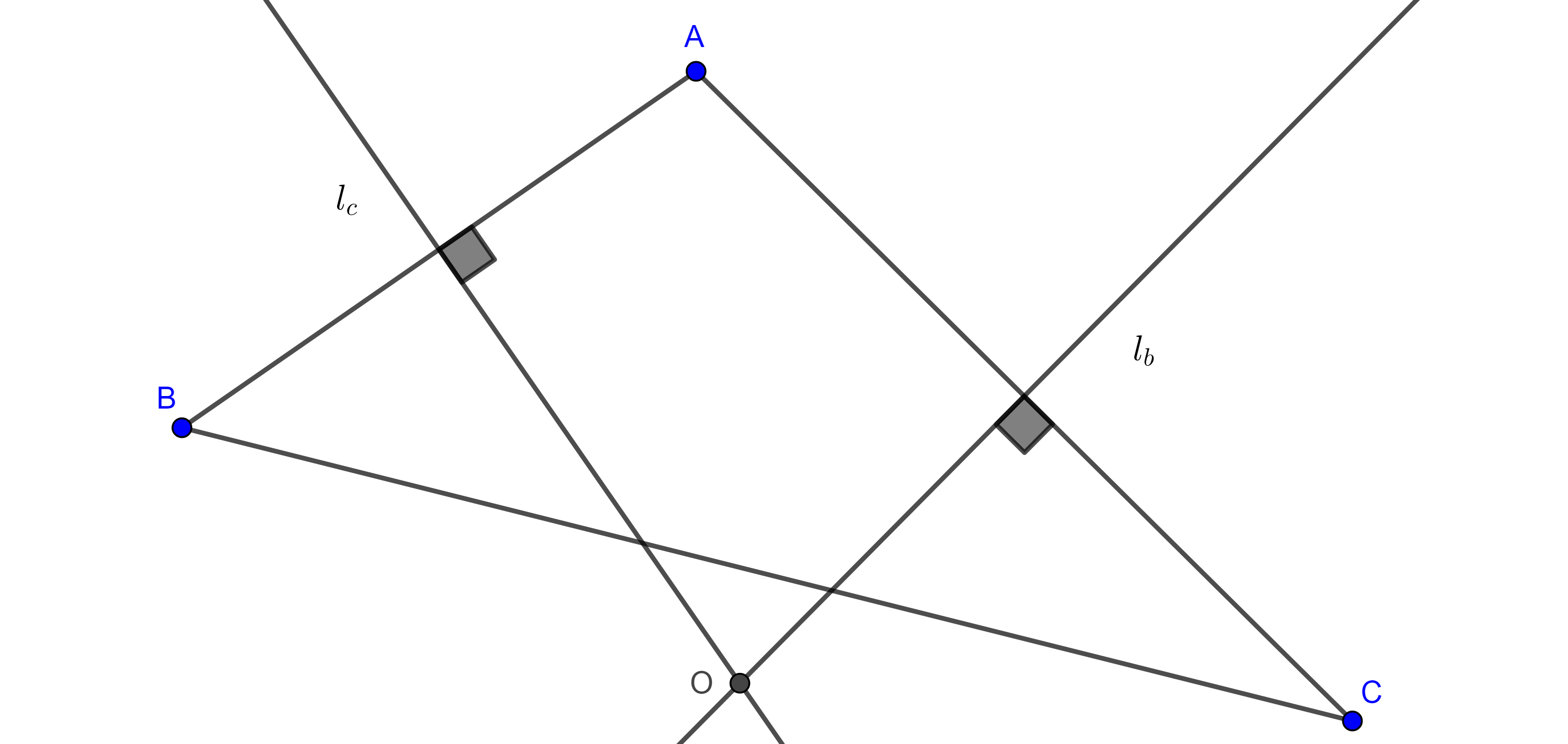
En la entrada desigualdad del triángulo y lugar geométrico mostramos que un punto está en la mediatriz de un segmento si y solo si equidista a los puntos extremos del segmento.
Ya que $O \in l_c$ y $O \in l_b$, entonces $OA = OB$ y $OA = OC$
$\Rightarrow OB = OC$.
Por el resultado mencionado anteriormente $OB = OC$ implica que $O \in l_a$, la mediatriz de $BC$.
Por lo tanto, las mediatrices de un triángulo son concurrentes.
$\blacksquare$
Corolario. Tres puntos distintos y no colineales se encuentran en una única circunferencia.
Demostración. Sea $\triangle ABC$, por el teorema anterior las mediatrices de los segmentos determinados por los vértices del triángulo concurren en un punto $O$ cuya distancia a cada uno de los vértices es la misma $R = OA = OB = OC$.
Por definición de circunferencia, $A$, $B$ y $C$ pertenecen a la circunferencia con centro en $O$ y radio $R$, $A$, $B$, $C \in (O, R) = \Gamma$.
Ahora supongamos que existe $\Gamma’ = (O’, R’)$ tal que $A$, $B$, $C \in \Gamma’$, entonces, por definición, $O’A = O’B = O’C = R’$.
Esto implica que $O’ \in l_a$, $O’ \in l_b$ y $O’ \in l_c$, las mediatices de $BC$, $AC$ y $AB$ respectivamente,
$\Rightarrow O \in l_a \cap l_b \cap l_c$.
Como ya probamos que las mediatrices son concurrentes entonces $O’ = O$ y $R’ = R$, así que $\Gamma$ es única.
$\blacksquare$
Definición 2. Al punto de concurrencia de las mediatrices de los lados de un triángulo le llamamos circuncentro y lo denotamos como $O$.
A la distancia constante de $O$ a los vértices del triángulo le llamamos circunradio denotado con la letra $R$ mayúscula.
A la circunferencia única $(O, R)$ determinada por los vértices del triángulo se le conoce como circuncírculo.
Incentro
Teorema 3. Las bisectrices interiores de todo triángulo son concurrentes.
Demostración. Sean $l_B$ y $l_C$ las bisectrices de los ángulos interiores en $\angle B$ y $\angle C$ respectivamente e $I = l_{B} \cap l_{C}$.
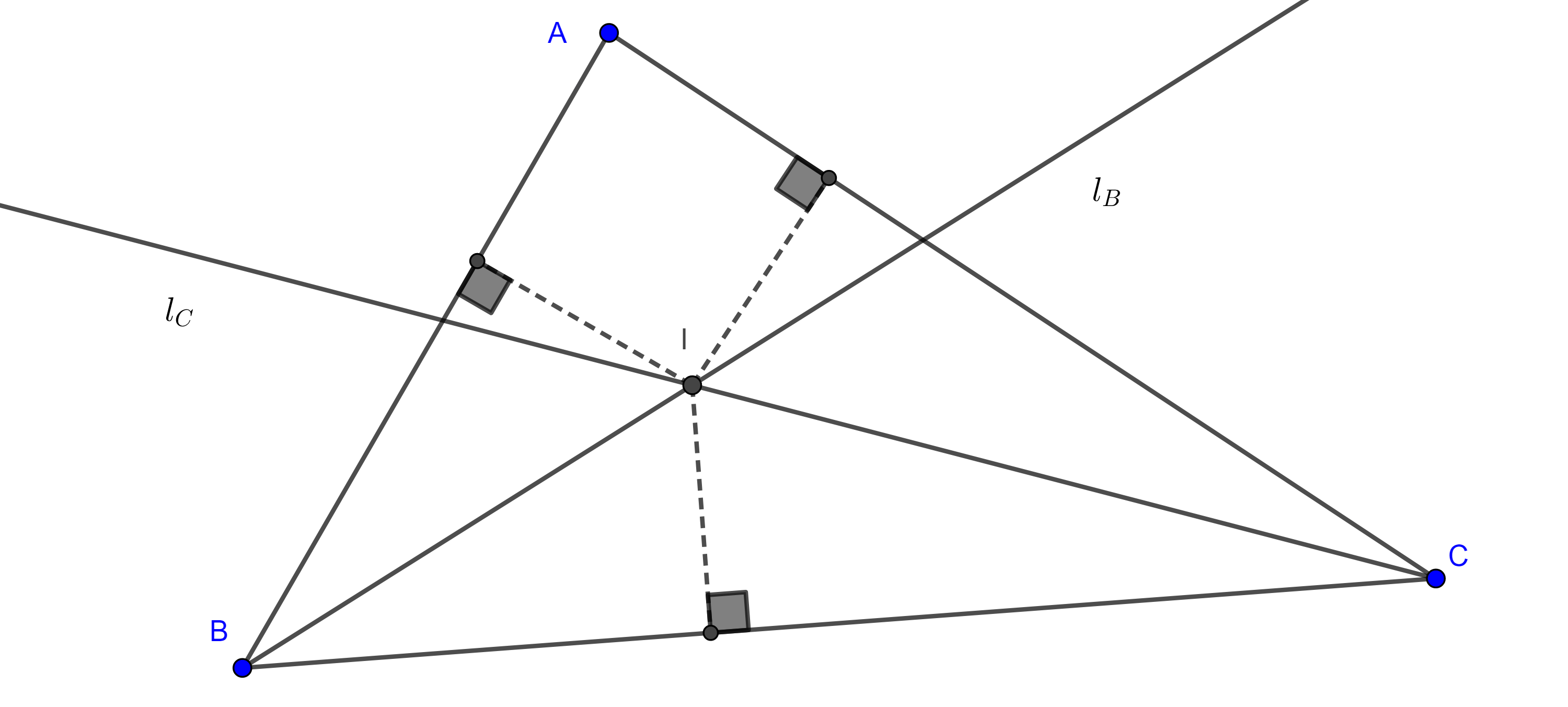
En la entrada desigualdad del triángulo y lugar geométrico mostramos que un punto está en la bisectriz de un ángulo si y solo si equidista a los lados que forman el ángulo. Recordemos que la distancia de un punto a una recta es la longitud del punto al pie de la perpendicular a la recta trazada desde el punto.
Denotamos la distancia de un punto $P$ a una recta $l$ como $(P, l)$.
Como $I \in l_{b}$ e $I \in l_{c}$, entonces $(I, AB) = (I, BC)$ y $(I, BC) = (I, AC)$,
$\Rightarrow (I, AB) = (I, AC)$.
Por el resultado citado anteriormente, $(I, AB) = (I, AC)$ implica que $I \in l_A$, la bisectriz interior de $\angle A$.
Por tanto, las bisectrices interiores de un triángulo son concurrentes.
$\blacksquare$
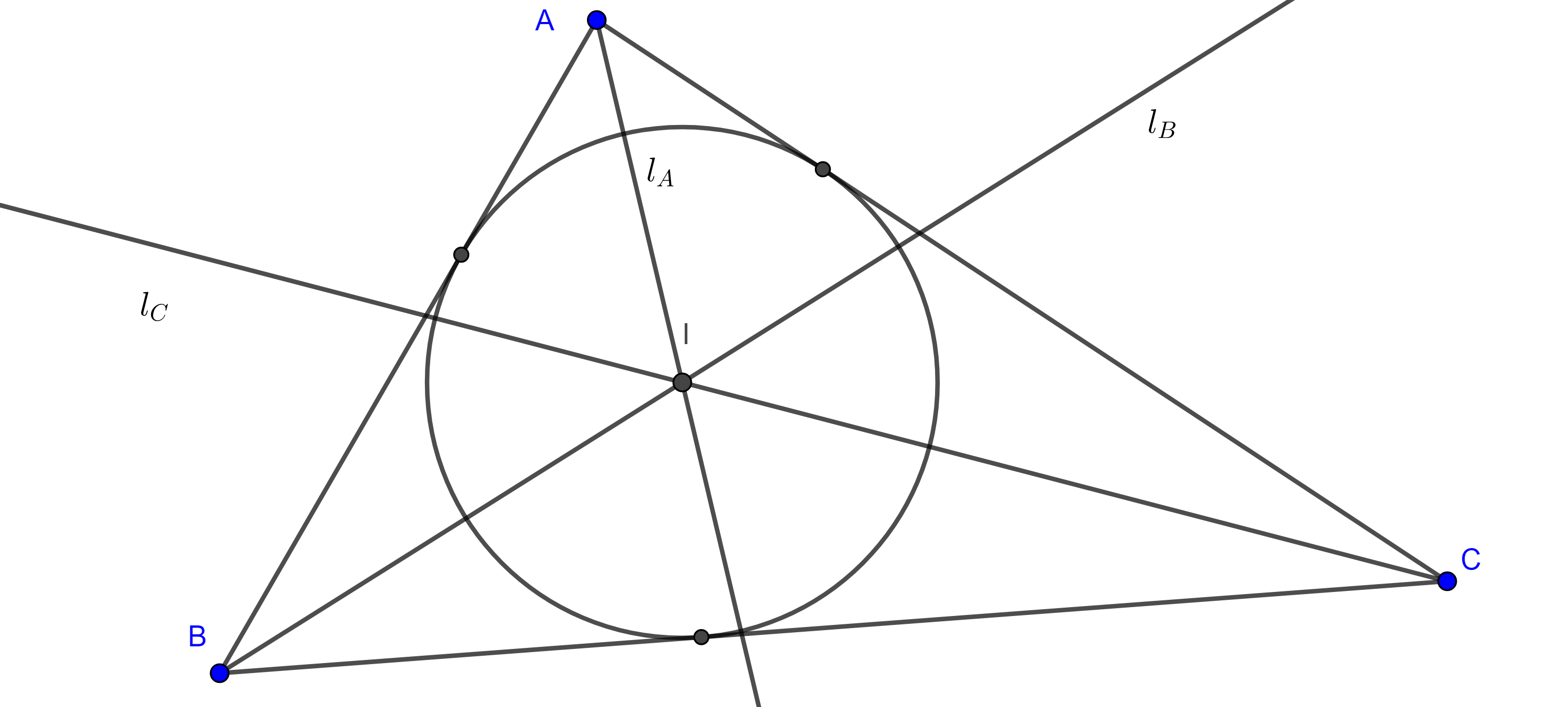
Si consideramos los pies de las perpendiculares a los lados del triángulo trazados desde el punto en que concurren las bisectrices, encontramos tres puntos distintos que equidistan a un punto fijo y por el corolario anterior estos determinan una única circunferencia, esto motiva la siguiente definición.
Definición 3. Al punto de concurrencia de las bisectrices interiores de un triángulo se le conoce como incentro del triángulo y lo denotamos con la letra $I$ mayúscula.
A la distancia de $I$ a los lados del triángulo le llamamos inradio y lo denotamos como $r = (I, AB) = (I, BC) = (I, AC)$.
La circunferencia con centro en $I$ y radio $r$, $(I, r)$, se llama incírculo.
Excentros
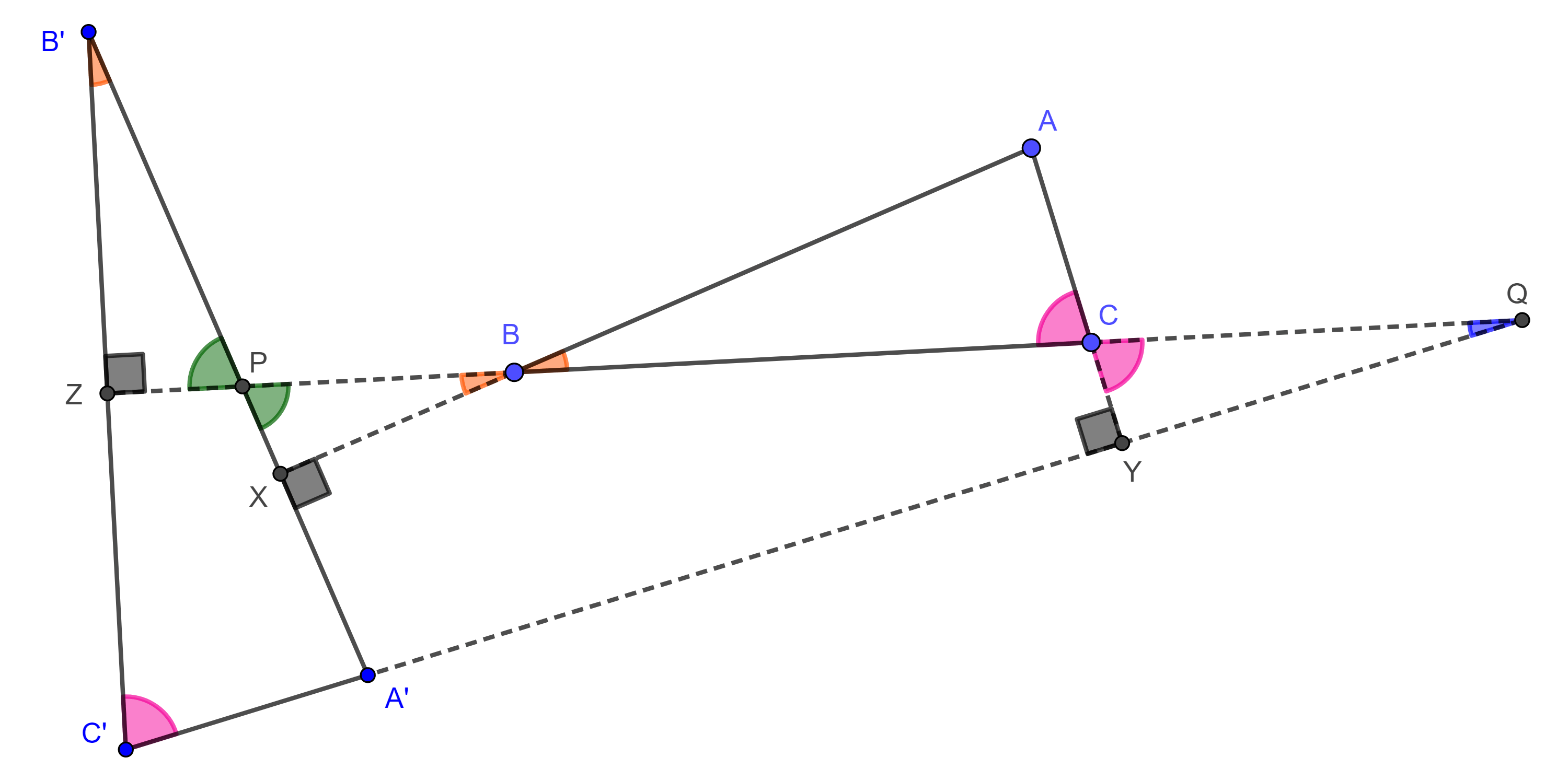
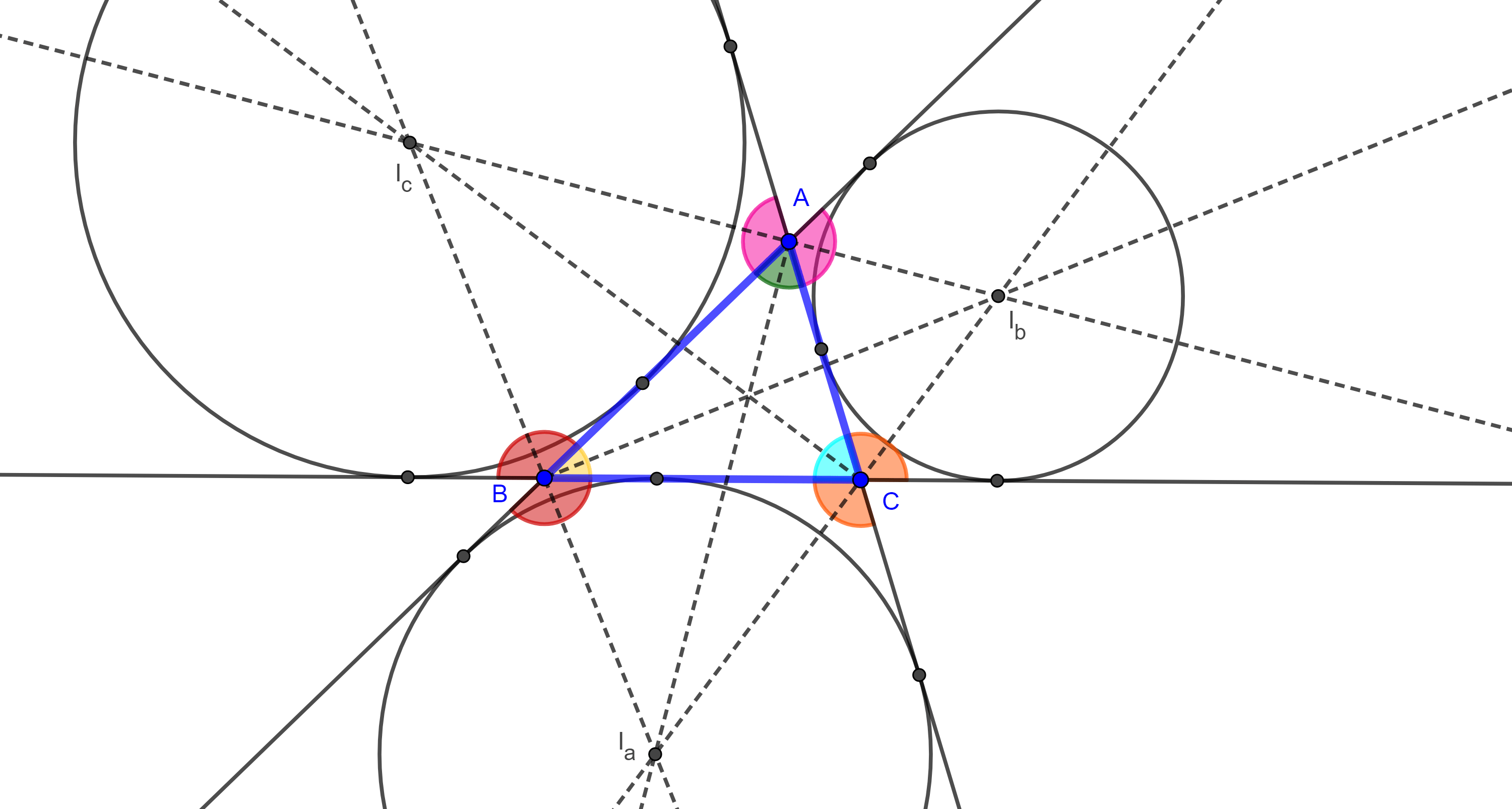
Teorema 4. En todo triángulo las bisectrices exteriores de dos ángulos y la bisectriz interior del tercer ángulo son concurrentes.
Demostración. Sea $\triangle ABC$, $l_A$ y $l_C$ las bisectrices exteriores de $\angle A$ y $\angle C$ respectivamente e $I_b = l_A \cap l_C$.
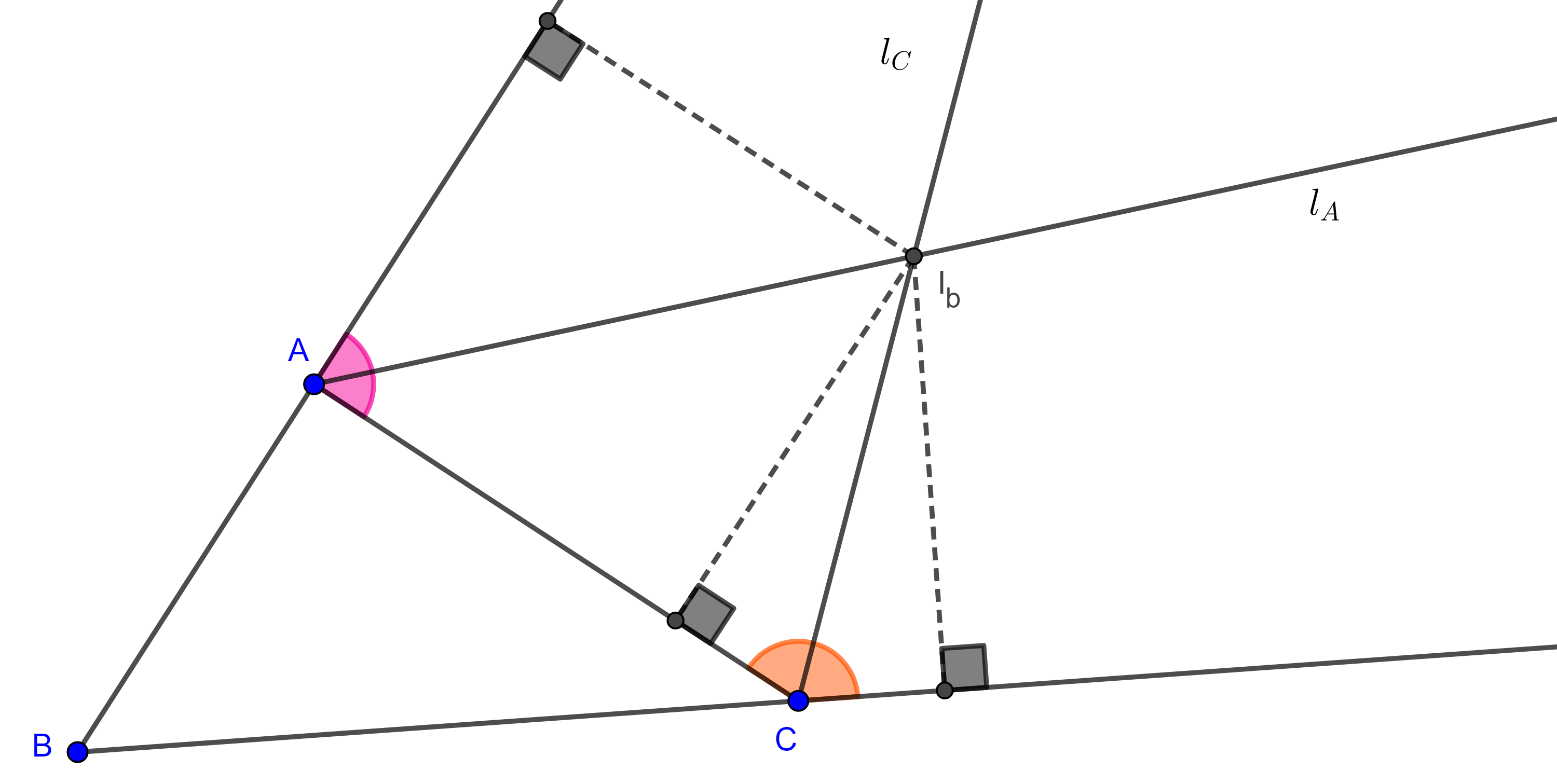
De manera análoga al caso de las bisectrices internas tenemos que
como $I_b \in l_A$ e $I_b \in l_C$, entonces $(I_b, AB) = (I_b, AC)$ y $(I_b, AC) = (I_b, BC)$,
$\Rightarrow (I_b, AB) = (I_b, BC)$.
Como $I_b$ está en la región acotada por el ángulo $\angle CBA$ entonces $I \in l_B$, la bisectriz interior de $\angle B$.
Por lo tanto, la bisectriz interna de $\angle B$ y las bisectrices externas de $A$ y $C$ son concurrentes.
De manera análoga probamos que las bisectrices externas de $\angle A$ y $\angle B$ concurren con la bisectriz interna de $\angle C$, y las bisectrices externas de $\angle B$ y $\angle C$ concurren con la bisectriz interna de $\angle A$.
$\blacksquare$
Similarmente a como lo hicimos con el incentro, notamos que, para cada uno de estos tres puntos de concurrencia, existen tres puntos distintos, uno en cada lado del triángulo que equidistan a un punto fijo y por lo tanto determinan una única circunferencia.
Definición 4. A los puntos en que concurren dos bisectrices externas y una bisectriz interna de un triángulo les llamamos excentros del triángulo y los denotamos como $I_a$, $I_b$ e $I_c$ de acuerdo a si se encuentran en la bisectriz interna de $\angle A$, $\angle B$ o $\angle C$ respectivamente y decimos que son opuestos a dichos vértices.
Las distancias de $I_a$, $I_b$ e $I_c$ a los lados del triángulo son los exradios y se les denota como $r_a$, $r_b$ y $r_c$ respectivamente.
A las circunferencias $(I_a, r_a)$, $(I_b, r_b)$ y $(I_c, r_c)$ se les conoce como excírculos del triángulo.
Ortocentro
Teorema 5. Las alturas de todo triángulo son concurrentes.
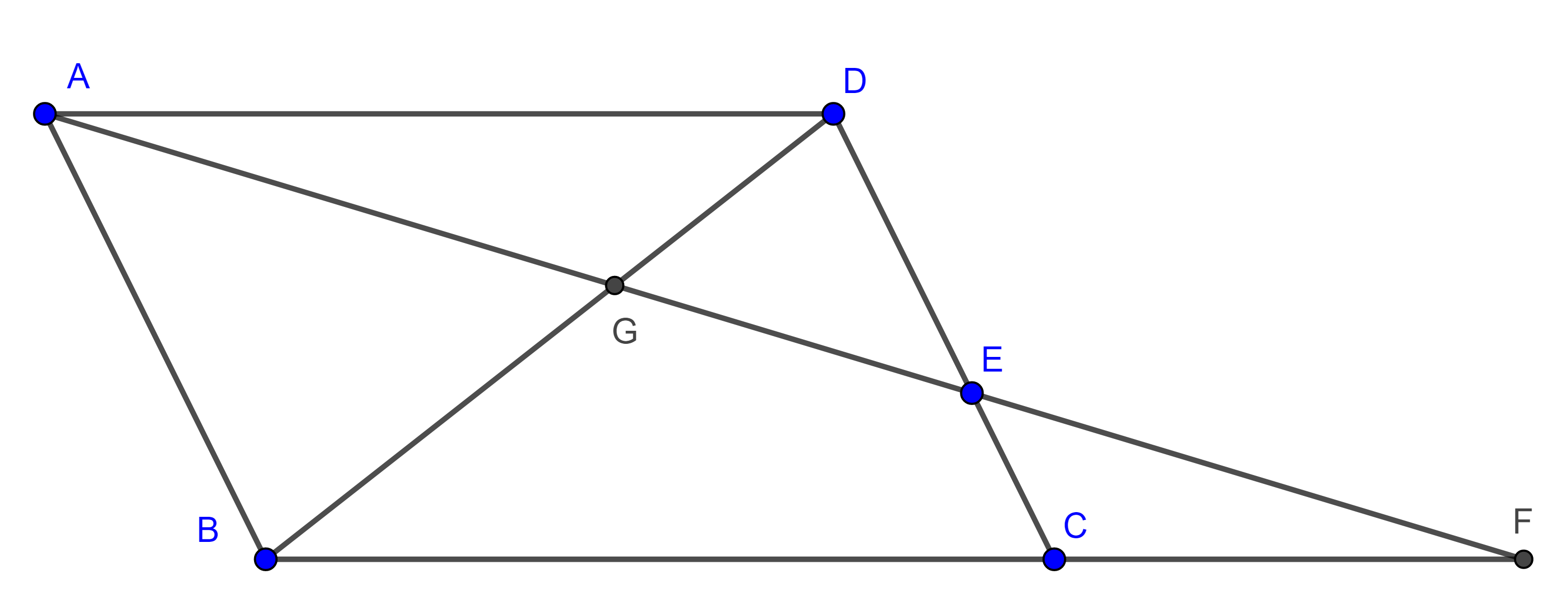
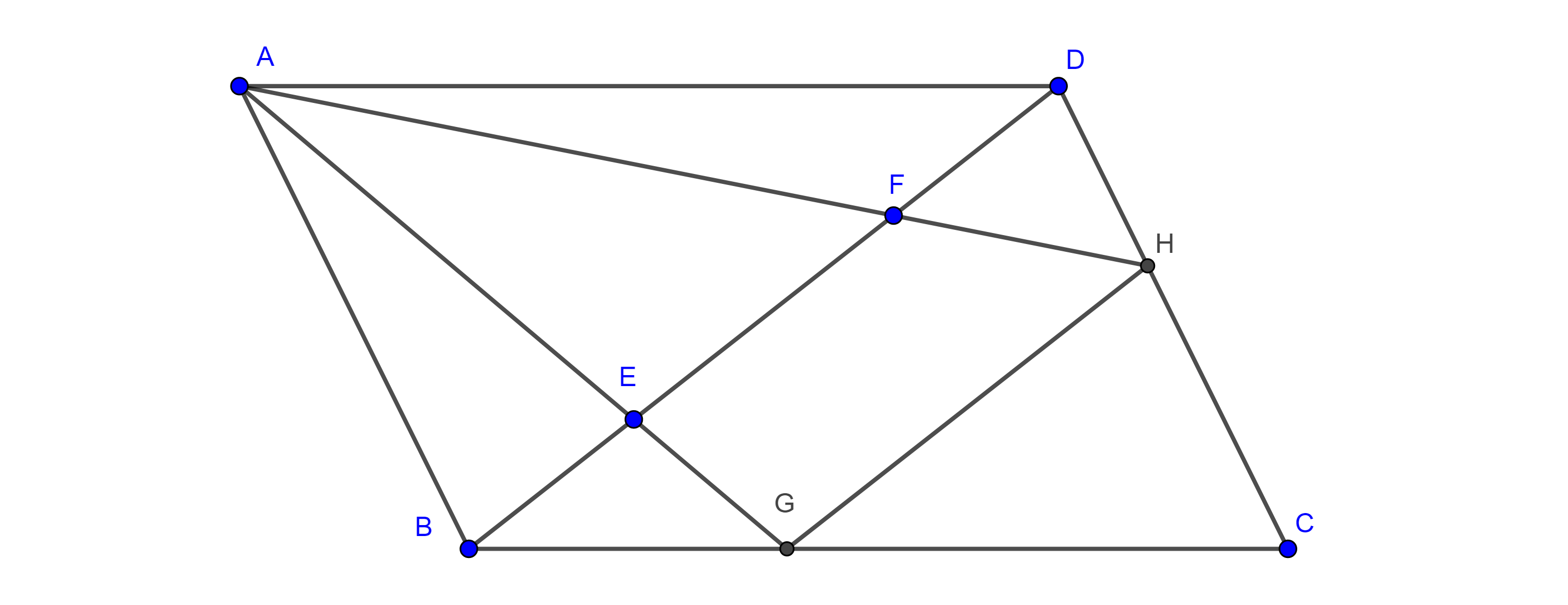
Demostración. Sea $\triangle ABC$, tracemos en cada vértice la paralela al lado opuesto.
Sean $A’$ la intersección de la paralela a $AB$ trazada en $C$ con la paralela a $AC$ trazada en $B$, de manera análoga definimos $B’$ y $C’$.
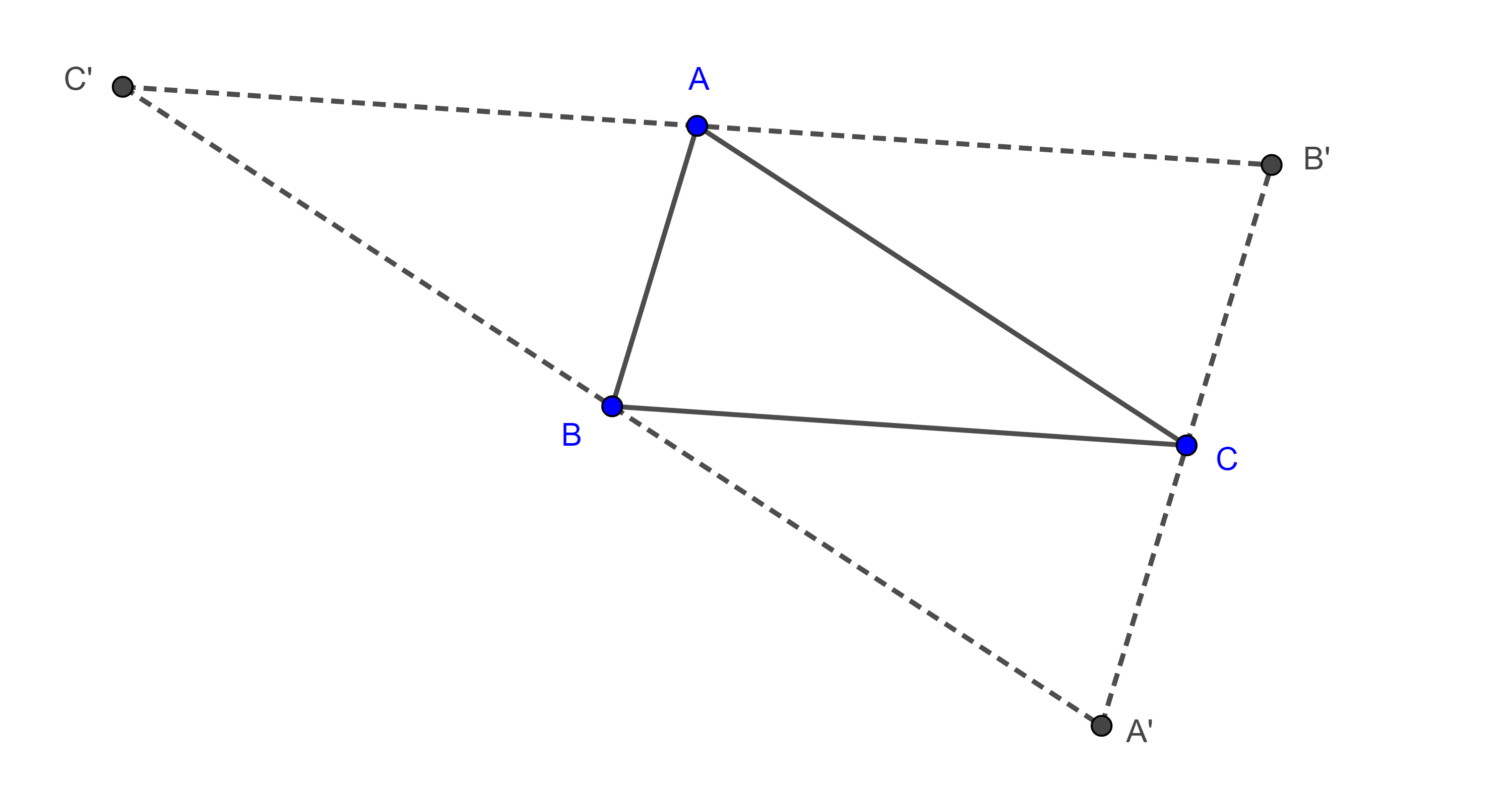
Por construcción, $\square ABCB’$ es un paralelogramo por lo que $AB’ = BC$, también $\square C’BCA$ es paralelogramo así que $C’A = BC$,
$\Rightarrow AB’ = BC = C’A \Rightarrow A$ es el punto medio de $C’B’$.
De manera similar podemos ver que $B$ es el punto medio de $C’A’$ y $C$ es el punto medio de $A’B’$.
En consecuencia, las alturas del triángulo $\triangle ABC$ son las mediatrices del triángulo $\triangle C’A’B’$ y ya probamos que las mediatrices de los lados de todo triangulo son concurrentes, por lo tanto, las alturas de $\triangle ABC$ son concurrentes.
$\blacksquare$
Definición 5. Al punto en común en que las tres alturas de un triángulo se intersecan le llamamos ortocentro y lo denotamos con la letra $H$ mayúscula.

Más adelante…
En la siguiente entrada demostraremos algunos teoremas que nos permitirán calcular la magnitud de ángulos relativos a una circunferencia.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
- ¿Qué puntos notables vistos en esta entrada, caen siempre dentro del triangulo y cuales siempre fuera?
- Muestra que una recta paralela a un lado de un triangulo a través del centroide divide el área del triangulo en dos partes tal que la razón de esta áreas es $\dfrac{4}{5}$.
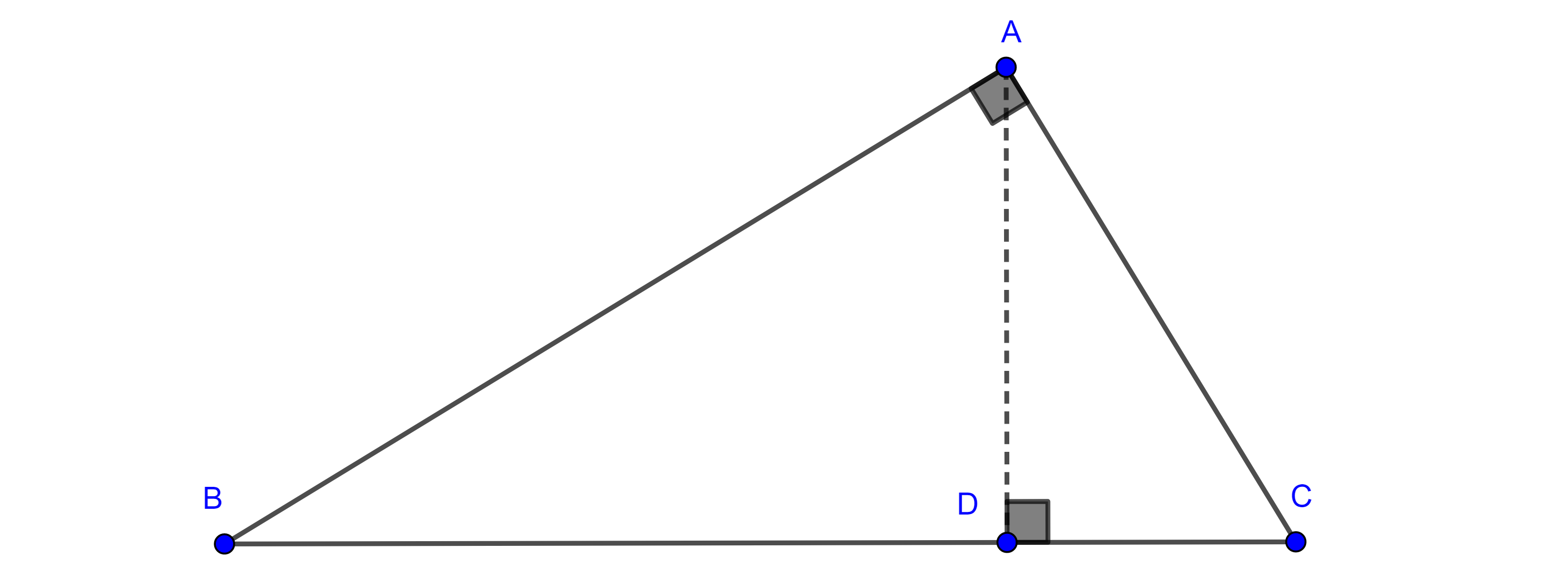
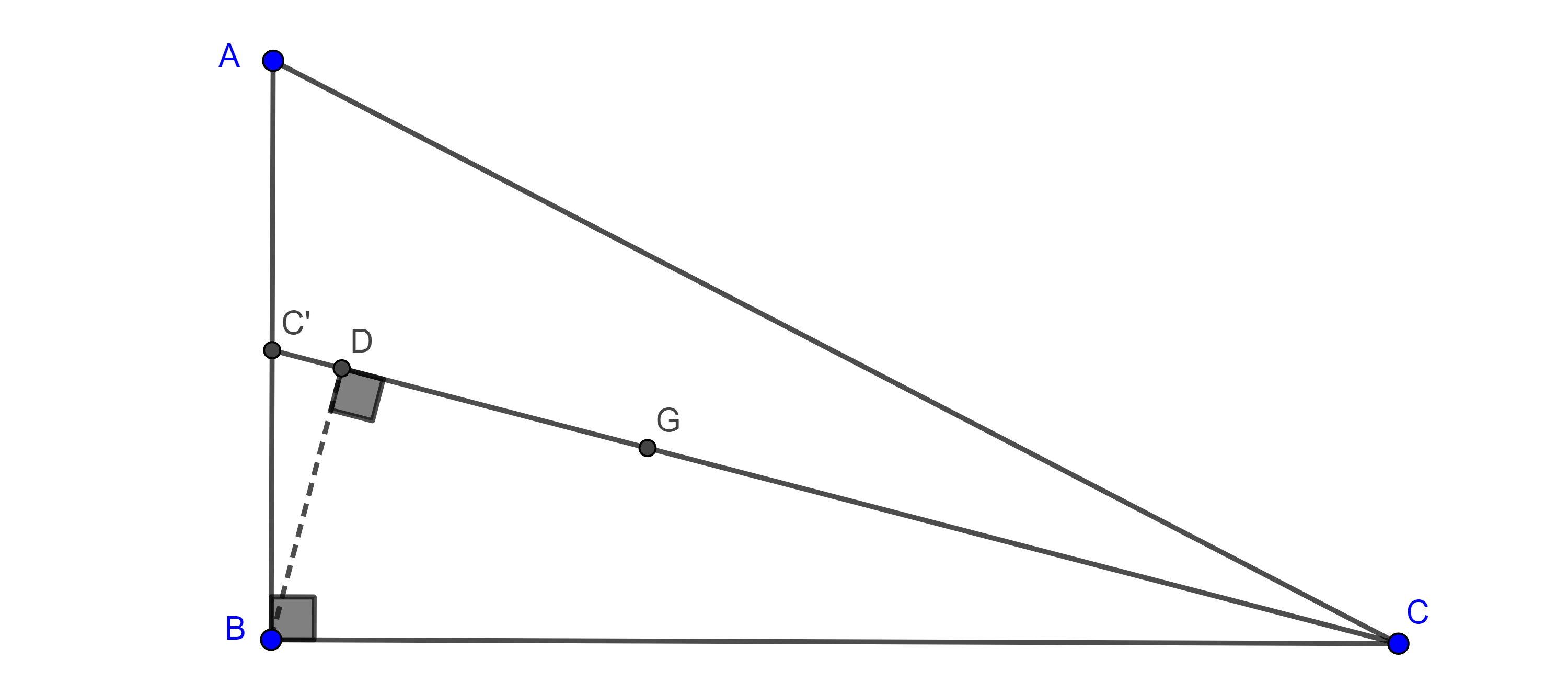
- Considera un triangulo rectángulo $\triangle ABC$ con $\angle B = \dfrac{\pi}{2}$, sean $CC’$ la mediana por $C$ y $D$ el pie de la perpendicular a $CC’$ trazada desde $B$ (figura 11), calcula la distancia de $D$ al centroide $G$ del triangulo en términos de los catetos.
- Un triángulo rectángulo tiene un ángulo interior de $\dfrac{\pi}{3}$, calcula la distancia del vértice donde se intersecan los catetos al incentro $I$ del triángulo en términos de la hipotenusa.
- Sea $\triangle ABC$ un triángulo tal que la mediana $AD$ es perpendicular a la mediana $BE$, encuentra $AB$ si $BC = a$ y $AC = b$.
Entradas relacionadas
- Ir a Geometría Moderna I
- Entrada anterior del curso: Segmentos dirigidos y teorema de Stewart.
- Siguiente entrada del curso: Ángulos en la circunferencia.
Fuentes
- Gomez, A. y Bulajich, R., Geometría. México: Instituto de Matemáticas, 2002, pp 29-34.
- Altshiller, N., College Geometry. New York: Dover, 2007, pp 65-94.
- Geometría interactiva
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»