Toca el turno de estudiar la distribución binomial negativa, otra distribución discreta que se origina de un contexto semejante al que da la distribución geométrica. Esta distribución, se aplica a la variable aleatoria X que determina el número del ensayo en el que ocurre el k–ésimo éxito (k= 2, 3, 4, etc.).
Distribución binomial negativa
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE 104721: “Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM”. Sitio web del proyecto: https://www.matematicasadistancia.com.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestre que la función de probabilidad de la distribución binomial negativa efectivamente es una función de probabilidad.
Sea $X$ una variable aleatoria, tal que $X\sim binomial\ negativa\left ( k,p\right ) $.Determina una relación repetitiva entre probabilidades binomiales negativas sucesivas.
Supongamos, se realizan ensayos Bernoulli independientes tal que, $P(E) = p$. ¿Cuál es la probabilidad de que exactamente $x$ intentos ocurran antes que se presente el $k– ésimo$ éxito?
Sea $X$ una variable aleatoria tal que $X\sim binomial\ negativa(k,p)$ y sea $Y = X – k$. La variable aleatoria $Y$, se puede interpretar como el número de fracasos antes del $k-ésimo$ éxito. Demuestra que $P(Y= y)=\begin{cases} {y+r-1 \choose r-1}p^kq^y & \mbox{para y=0,1,2,…} \\ 0 & \mbox{en otro caso} \end{cases}$.
Supongamos, se realizan ensayos Bernoulli independientes tal que, $P(E) = p$. Si $X\sim binomial\ negativa(k,p)$ y observamos el $k-ésimo$ éxito en el intento $y_0$. Encuentra el valor de $p$ que maximice $P(Y = y_0)$.
Más adelante…
La distribución binomial negativa es una generalización de la distribución geométrica, pues esta última se obtiene haciendo coincidir el parámetro k con 1. Esta distribución se ha aplicado en campos como la estadística, las ciencias biológicas, la ecología, también se ha utilizado en estudios de mercado, en la psicología y en investigaciones médicas.
La distribución discreta que estudiaremos en este video se conoce como distribución de probabilidad geométrica. Esta distribución al igual que la distribución binomial se asocia a experimentos que comprenden pruebas idénticas e independientes, cada una de las cuales puede arrojar uno de dos resultados: éxito o fracaso cuya probabilidad de éxito p, es constante de una prueba a otra; sin embargo, en lugar de interesarnos en las variables aleatorias que consisten en determinar el número total de éxitos, nos interesará ahora estudiar las variables aleatorias que determinan el número del ensayo en el que ocurre el primer éxito.
Distribución geométrica
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE 104721: “Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM”. Sitio web del proyecto: https://www.matematicasadistancia.com.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra que la función de probabilidad asociada a la distribución geométrica es efectivamente una función de probabilidad.
Sea $X$ una variable aleatoria tal que $X\sim geométrica\left ( n,p\right )$, demuestra que $P(X=k)$ decrece monótonamente alcanzando su valor más grande cuando $k$ es igual a $1$.
Sea $X$ una variable aleatoria tal que $X\sim geométrica\left ( n,p\right )$, demuestra que para un entero positivo $a$, $P\left ( X>a\right ) =q^a$.
Sea $X$ una variable aleatoria tal que $X\sim geométrica\left ( n,p\right )$, demuestra que $P\left ( X=\ un\ entero\ impar\right ) =\frac{p}{1-q^2}$.
Dos personas, por turnos, lanzan un dado equilibrado hasta que una de ellas obtiene un 6. La persona $A$ tiró primero, la $B$ en segundo, $A$ en tercero y así sucesivamente. En vista de que la persona $B$ tiró el primer 6, ¿Cuál es la probabilidad de que $B$ obtenga el primer 6 en su segundo tiro (es decir, en el cuarto tiro total)?
Más adelante…
La distribución geométrica también puede ser utilizada para estimar probabilidades, asociadas a resultados, en un subconjunto de ensayos que impliquen éxitos o fracasos. Esta distribución es empleada en procesos estocásticos. Se utiliza para modelar la duración de tiempos de espera permitiéndonos encontrarla con relativa frecuencia en modelos meteorológicos.
En entradas anteriores desarrollamos métodos para resolver la ecuación diferencial lineal de segundo orden con coeficientes variables de la forma $$a_{0}(t)\frac{d^{2}y}{dt^{2}}+a_{1}(t)\frac{dy}{dt}+a_{2}(t)y=0$$ alrededor de puntos ordinarios y cerca de puntos singulares regulares.
Utilizaremos estos métodos para resolver en esta y en las próximas dos entradas algunas ecuaciones especiales que se encuentran en otras áreas del conocimiento, principalmente en la física. Nos enfocaremos exclusivamente en encontrar soluciones a dichas ecuaciones, por lo que no hablaremos de las aplicaciones de éstas. Iniciamos en esta entrada con las ecuaciones de Hermite y Laguerre debidas a los matemáticos Charles Hermite y Edmond Laguerre.
La ecuación de Hermite tiene la forma $$\frac{d^{2}y}{dt^{2}}-2t\frac{dy}{dt}+\lambda y=0$$ con $t \in \mathbb{R}$ y $\lambda$ constante. Encontraremos una solución general con desarrollo en serie de potencias alrededor del punto ordinario $t_{0}=0$.
Por otro lado, la ecuación de Laguerre tiene la forma $$t\frac{d^{2}y}{dt^{2}}+(1-t)\frac{dy}{dt}+\lambda y=0$$ con $\lambda$ constante. Encontraremos una solución particular a dicha ecuación cerca del punto singular regular $t_{0}=0$ y tomando $t>0$. Finalmente veremos las dificultades para encontrar de forma explícita una segunda solución linealmente independiente a la primera, según la fórmula que encontramos en el desarrollo general del método de Frobenius.
Ecuación de Hermite
En el video encontramos la solución general a la ecuación de Hermite alrededor del punto ordinario $t_{0}=0$, además de hacer una observación importante acerca de la solución general para los casos cuando $\lambda$ es un entero par no negativo.
Ecuación de Laguerre
En el video encontramos una solución particular a la ecuación de Laguerre cerca del punto singular regular $t_{0}=0$. Posteriormente hablamos de la dificultad para encontrar una segunda solución de manera explícita, aún cuando el método de Frobenius nos ofrece la forma que debe tener esta segunda solución. Finalmente hacemos una importante observación acerca de la solución encontrada para los casos cuando $\lambda$ es un entero positivo.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Investiga los primeros cuatro polinomios de Hermite. Prueba que son solución particular a la ecuación de Hermite cuando $\lambda=0,2,4,6$ respectivamente. En general, el $n$-ésimo polinomio de Hermite será solución particular a la ecuación de Hermite cuando $\lambda=2n$.
Resuelve la ecuación de Hermite $$\frac{d^{2}y}{dt^{2}}-2t\frac{dy}{dt}+8y=0$$ alrededor del punto ordinario $t_{0}=0$, siguiendo paso a paso el método utilizado en el primer video (es decir, no uses únicamente la fórmula final del video).
Investiga los primeros cuatro polinomios de Laguerre. Prueba que son solución particular a la ecuación de Laguerre cuando $\lambda=0,1,2,3$ respectivamente. En general, el $n$-ésimo polinomio de Laguerre será solución particular a la ecuación de Laguerre cuando $\lambda=n$.
Encuentra una solución a la ecuación de Laguerre $$t\frac{d^{2}y}{dt^{2}}+(1-t)\frac{dy}{dt}+4y=0$$ alrededor del punto singular regular $t_{0}=0$, siguiendo paso a paso el método de Frobenius (nuevamente, no utilices únicamente la fórmula final del segundo video).
Más adelante
Hemos encontrado soluciones a dos de las seis ecuaciones especiales que revisaremos en esta serie de entradas. En la próxima continuaremos hablando de estas funciones especiales. En particular estudiaremos las ecuaciones de Bessel y Legendre.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Decimos que un cuadrilátero convexo es circunscrito si sus lados son tangentes a una misma circunferencia dentro del cuadrilátero. Nos referimos a dicha circunferencia como el incírculo y a su radio como el inradio del cuadrilátero.
Sabemos que los lados de un triángulo siempre son tangentes a una misma circunferencia, el incírculo del triángulo, cuyo centro es el punto donde concurren las bisectrices internas, en esta entrada estudiaremos cuando un cuadrilátero es circunscrito y algunas propiedades.
Primera caracterización para el cuadrilátero circunscrito
Teorema 1. Un cuadrilátero es circunscrito si y solo si la suma de dos lados opuestos es igual a la suma de los otros dos lados opuestos.
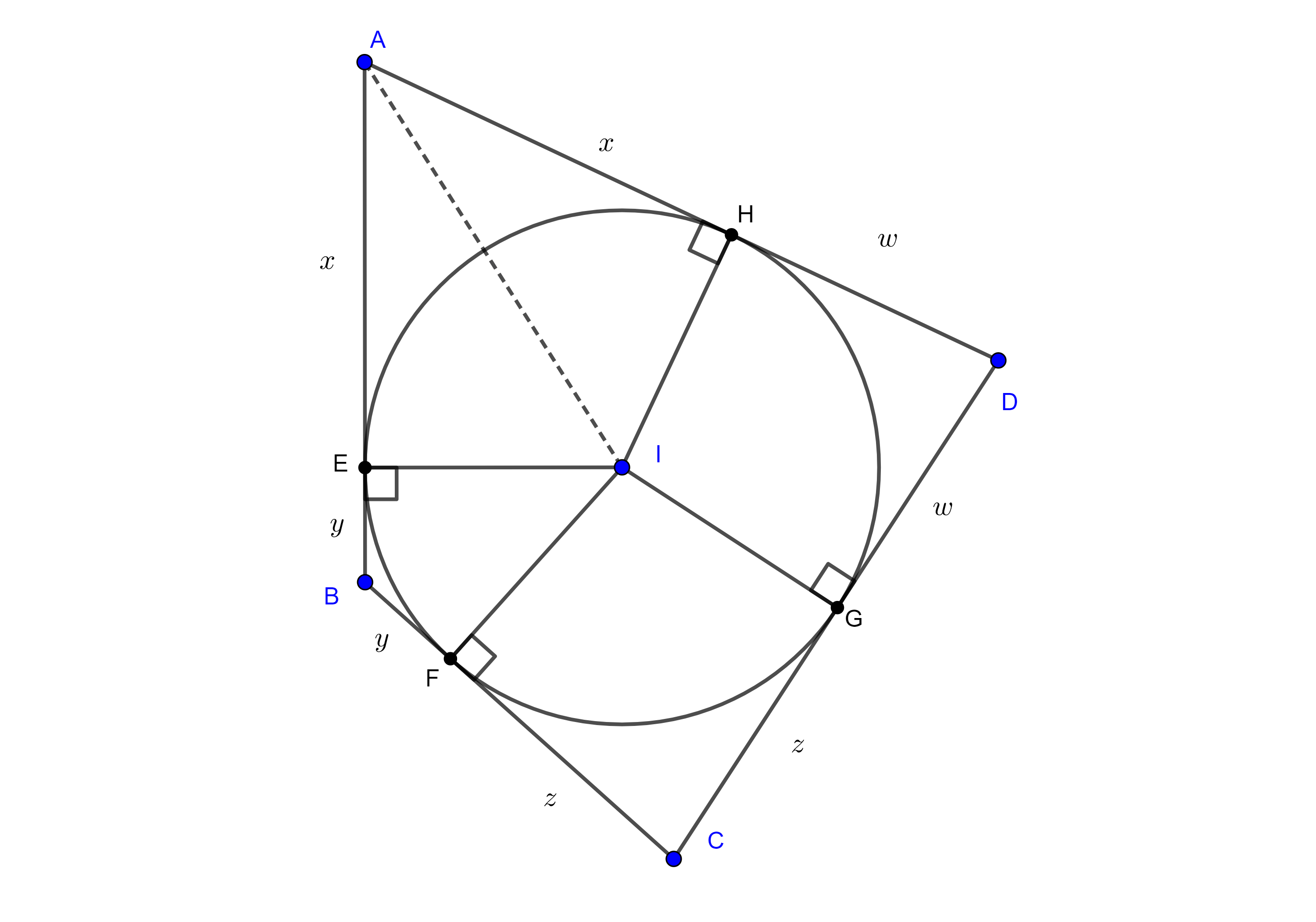
Demostración. Sean $\square ABCD$ un cuadrilátero circunscrito, $E$, $F$, $G$ y $H$ los puntos de tangencia de la circunferencia a los lados $AB$, $BC$, $CD$ y $AD$ respectivamente y consideremos $I$ el incentro de $\square ABCD$.
Figura 1
Recordemos que las tangentes a una circunferencia desde un punto externo a esta son iguales, por lo tanto, $AH = AE = x$, $BE = BF = y$, $CF = CG = z$, $DG = DH = w$.
Entonces $AB + CD = (x + y) + (z + w) = (x + w) + (y + z) = AD + BC$.
$\blacksquare$
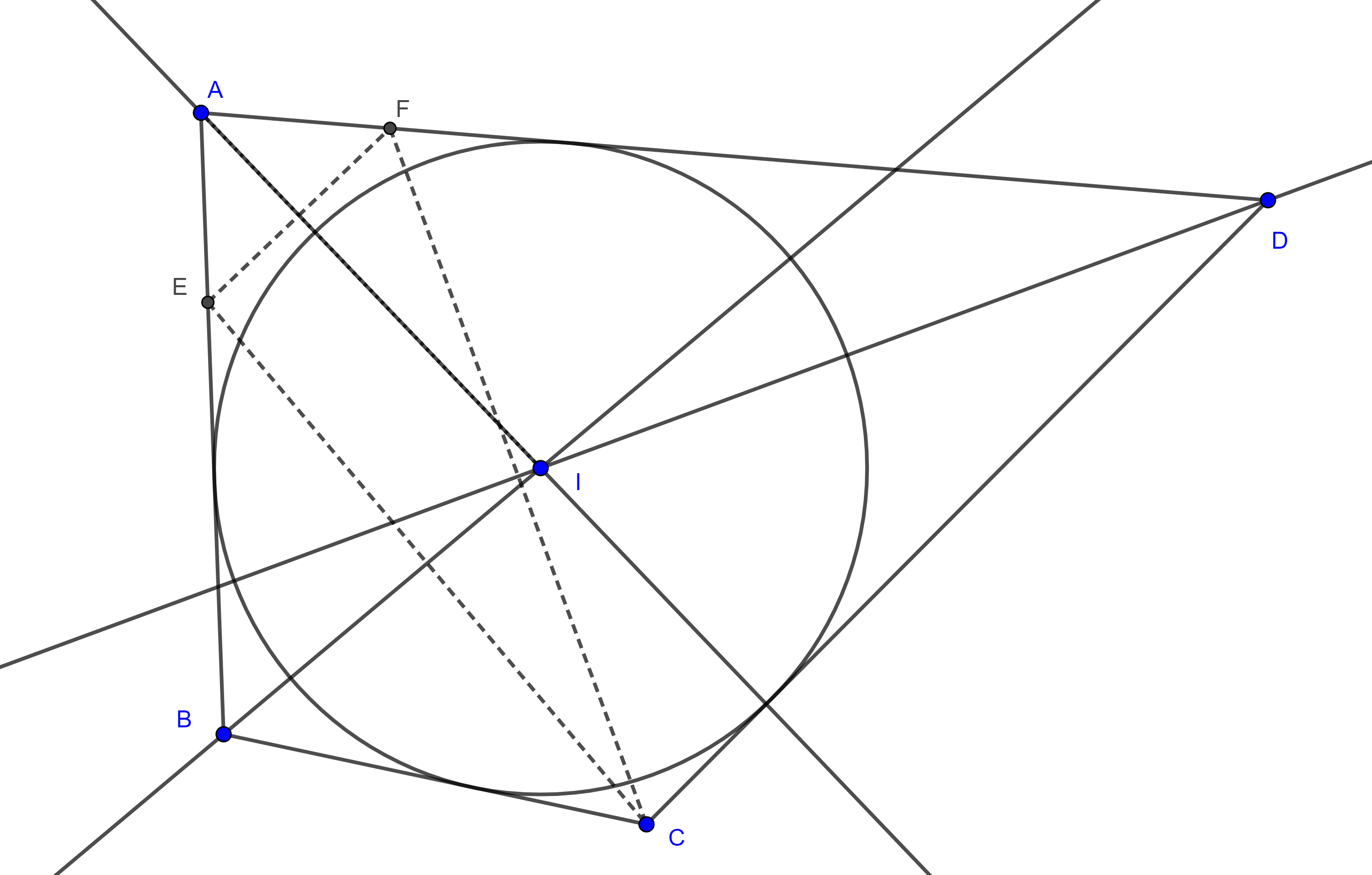
Ahora supongamos que en $\square ABCD$ se tiene que $AB + CD = AD + BC$ y que tiene un par de lados adyacentes que no son iguales.
Sin pérdida de generalidad podemos suponer que $AB > BC$ entonces, $\begin{equation} AD – CD = AB – BC > 0. \end{equation}$.
Figura 2
Sean $E \in AB$ y $F \in AD$ tales que $EB = BC$ y $FD = CD$ entonces por la ecuación $(1)$ $AE = AF$ y así $\triangle AEF$, $\triangle BCE$ y $\triangle DFC$ son isósceles.
Por lo tanto, las bisectrices internas de los ángulos $\angle EAF$, $\angle CBE$ y $\angle ADC$, son las mediatrices de $\triangle EFC$, por lo tanto, concurren en un punto $I$.
Como $I$ está en las bisectrices internas de los ángulos $\angle AEF$, $\angle BCE$ y $\angle DFC$, entonces, equidista a cado uno de los lados que forman dichos ángulos y de esta forma $I$ es el centro de una circunferencia tangente a los lados de $\square ABCD$.
La otra posibilidad es que todos los lados del cuadrilátero sean iguales es decir el cuadrilátero sea un rombo, este caso se queda como ejercicio.
$\blacksquare$
Teorema de Newton
Teorema 2, de Leon Anne. Sea $\square ABCD$ un cuadrilátero que no es un paralelogramo, el lugar geométrico de los puntos $P$ en el interior de $\square ABCD$ tal que $(\triangle APB) + (\triangle CPD) = (\triangle BPC) + (APD)$, es la recta de Newton de $\square ABCD$.
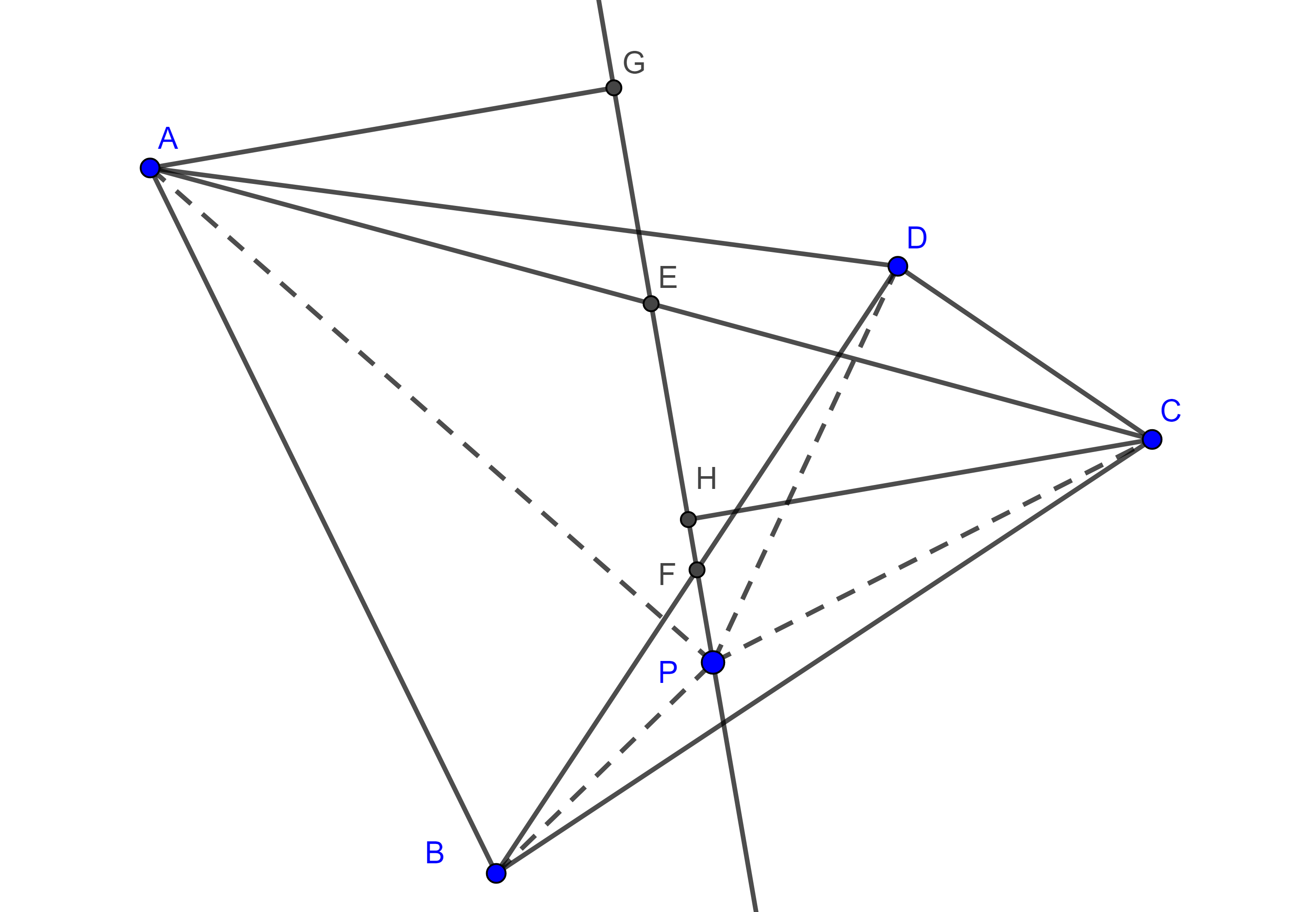
Demostración. Sean $P$ un punto en el interior de $\square ABCD$ tal que $(\triangle APB) + (\triangle CPD) = (\triangle BPC) + (APD)$ y $F$ el punto medio de $BD$.
Figura 3
Podemos ver el área de los triángulos considerados como suma y diferencia de otras áreas:
Notemos que como $B$, $F$ y $D$ son colineales entonces $\triangle AFB$ y $\triangle AFD$ tienen la misma altura desde $A$, y ya que $FB = FD$ entonces $(\triangle AFB) = (\triangle AFD)$.
Igualmente podemos ver que $(\triangle BFP) = (\triangle DFP)$ y $(\triangle CFD) = (\triangle BFC)$.
De la ecuación $(2)$ se sigue que $(\triangle CFP) = (\triangle AFP)$.
Como ambos triángulos tienen la misma base entonces las alturas trazadas desde $A$ y $C$ a la recta $FP$ son la mismas, digamos $AG = CH$.
Consideremos $E$ la intersección de $AC$ con $FP$, entonces $\triangle AEG$ y $\triangle CEH$ son congruentes, por criterio ángulo, lado, ángulo.
Por lo tanto $E$ es el punto medio de $AC$ y así $P$ está en la recta de Newton de $\square ABCD$.
La implicación reciproca se puede ver tomando en sentido contrario los argumentos anteriores.
$\blacksquare$
Teorema 3. De Newton. Si un cuadrilátero es circunscrito entonces su incentro esta en la recta de Newton del cuadrilátero.
Demostración. Sean $\square ABCD$ un cuadrilátero circunscrito $I$ y $r$ el centro y el radio de su incírculo respectivamente, entonces por el teorema 1 sabemos que: $AB + CD = AD + BC$ $\Rightarrow \dfrac{r}{2}(AB + CD) = \dfrac{r}{2}(AD + BC)$ $\Rightarrow (\triangle AIB) + (\triangle CID) = (\triangle AID) + (\triangle BIC)$.
Por lo tanto, $I$ se encuentra en la recta de Newton de $\square ABCD$.
$\blacksquare$
Rectas concurrentes en el cuadrilátero circunscrito
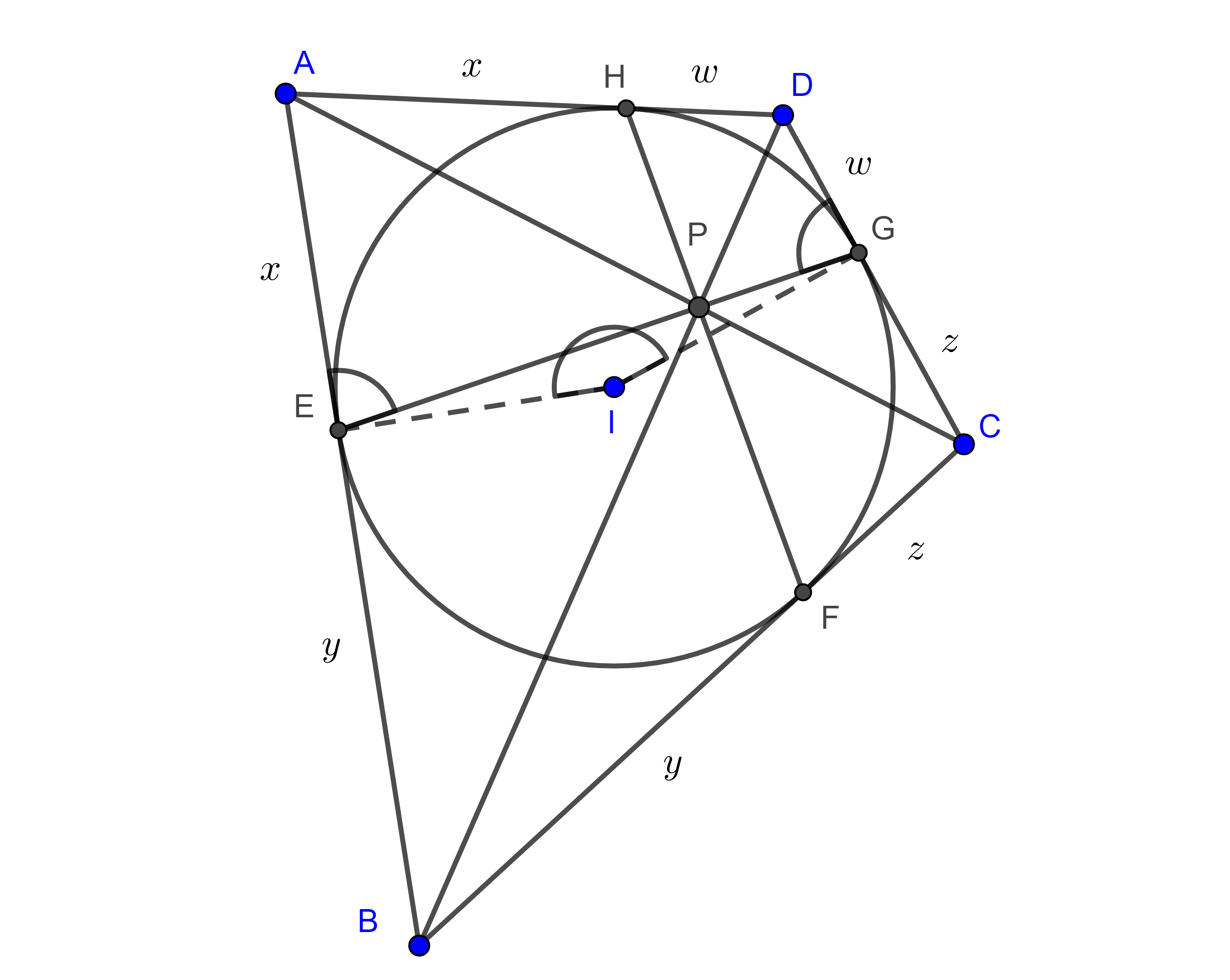
Teorema 4. Sea $\square ABCD$ un cuadrilátero circunscrito y sean $E$, $F$, $G$ y $H$ los puntos de tangencia del circuncírculo con los lados $AB$, $BC$, $CD$ y $AD$ respectivamente, entonces, $i)$ las cuerdas $EG$, $FH$ y las diagonales $AC$, $BD$ son concurrentes $ii)$ si $P$ es el punto de concurrencia, entonces, $\dfrac{AP}{CP} = \dfrac{x}{z}$ y $\dfrac{BP}{DP} = \dfrac{y}{w}$.
Demostración. Sean $I$ el incentro de $\square ABCD$ y $P = AC \cap EG$.
Como $AB$ y $CD$ son tangentes al circuncírculo en $E$ y $G$ respectivamente, entonces $\angle GEA = \angle DGE$, pues ambos son ángulos semiinscritos que abarcan el mismo arco.
Figura 4
Por lo tanto, $\sin \angle PEA = \sin \angle DGP = \sin (\pi – \angle DGP) = \sin \angle PGC$.
Por otro lado, $2(\triangle AEP) = AP \times EP \sin \angle APE = AE \times EP \sin \angle PEA$, $2(\triangle CGP) = PG \times CP \sin \angle CPG = CG \times GP \sin \angle PGC$.
Lo que significa que la cuerda $EG$ divide internamente a la diagonal $AC$ en la razón $\dfrac{AE}{CG} = \dfrac{x}{z}$.
Similarmente podemos mostrar que la cuerda $FH$ divide internamente a la diagonal $AC$ en la razón $\dfrac{x}{z}$, por lo tanto, $EG$, $FH$, se intersecan en $AC$.
Repitiendo este procedimiento, pero esta vez para la diagonal $BD$ podemos ver que $BD$, $EG$ y $FH$ concurren, y que $\dfrac{BP}{DP} = \dfrac{y}{w}$.
Por lo tanto, las diagonales $AC$, $BD$ y las cuerdas $EG$, $FH$ son concurrentes.
Demostración. Notemos que los triángulos $\triangle APB$ y $\triangle BPC$ tienen la misma altura desde el vértice $B$, y ya que $A$, $P$ y $C$ son colineales, entonces usando la razón, encontrada en el teorema anterior, en la que $P$ divide a $AC$.
Las otras igualdades se muestran de manera análoga.
$\blacksquare$
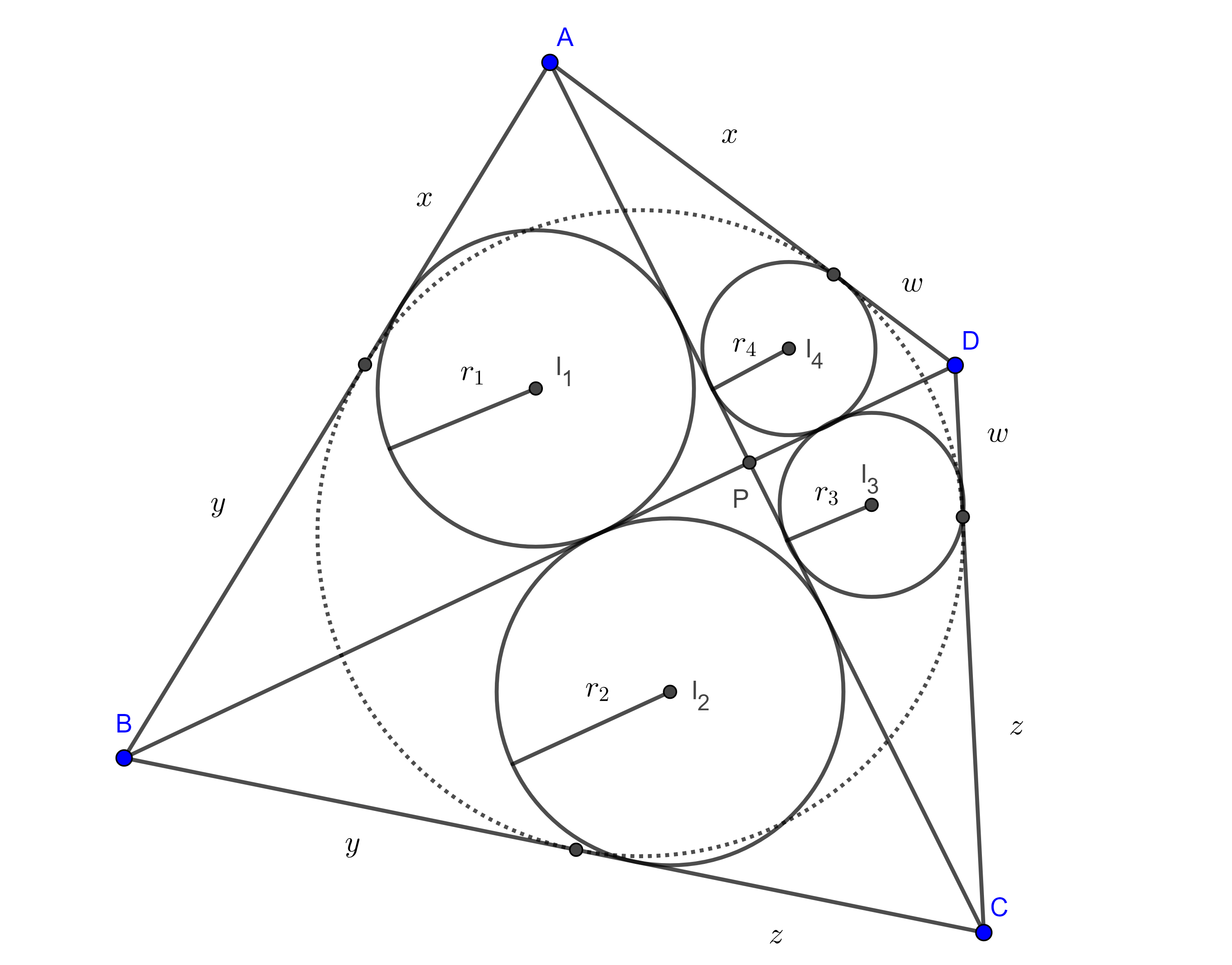
Una propiedad referente a inradios
Teorema 5. Sean $\square ABCD$ circunscrito, $P$ el punto de intersección de las diagonales, y consideremos los inradios $r_{1}$, $r_{2}$, $r_{3}$, $r_{4}$, de los triángulos $\triangle APB$, $\triangle BPC$, $\triangle CPD$ y $\triangle APD$ respectivamente, entonces $\dfrac{1}{ r_{1}} + \dfrac{1}{ r_{3}} = \dfrac{1}{ r_{2}} + \dfrac{1}{ r_{4}}$.
Lema. Sean $\triangle ABC$, $I$ y $r$ el incentro y el inradio de su circuncírculo entonces $i)$ $AB + AC – BC = 2 r \cot \dfrac{\angle A}{2}$, $ii)$ $AI = \dfrac{r}{\sin \dfrac{\angle A}{2}}$.
Demostración. Consideremos $D$, $E$ y $F$ los puntos de tangencia de $(I, r)$ con $AB$, $BC$ y $AD$ respectivamente entonces $AD = AF$, $BD = BE$ y $CE = CF$ además en el triángulo rectángulo $\triangle ADI$ $\tan\dfrac{\angle A}{2} = \dfrac{ID}{AD} \Leftrightarrow AD = r \cot \dfrac{\angle A}{2}$.
Figura 6
Por lo tanto, $AB + AC – BC = (AD + BD) + (AF + CF) – (BE + CE) = 2AD = 2 r \cot \dfrac{\angle A}{2}$.
Por otra parte en $\triangle ADI$, $\sin \dfrac{\angle A}{2} = \dfrac{ID}{IA} \Leftrightarrow AI = \dfrac{r}{\sin \dfrac{\angle A}{2}}$.
$\blacksquare$
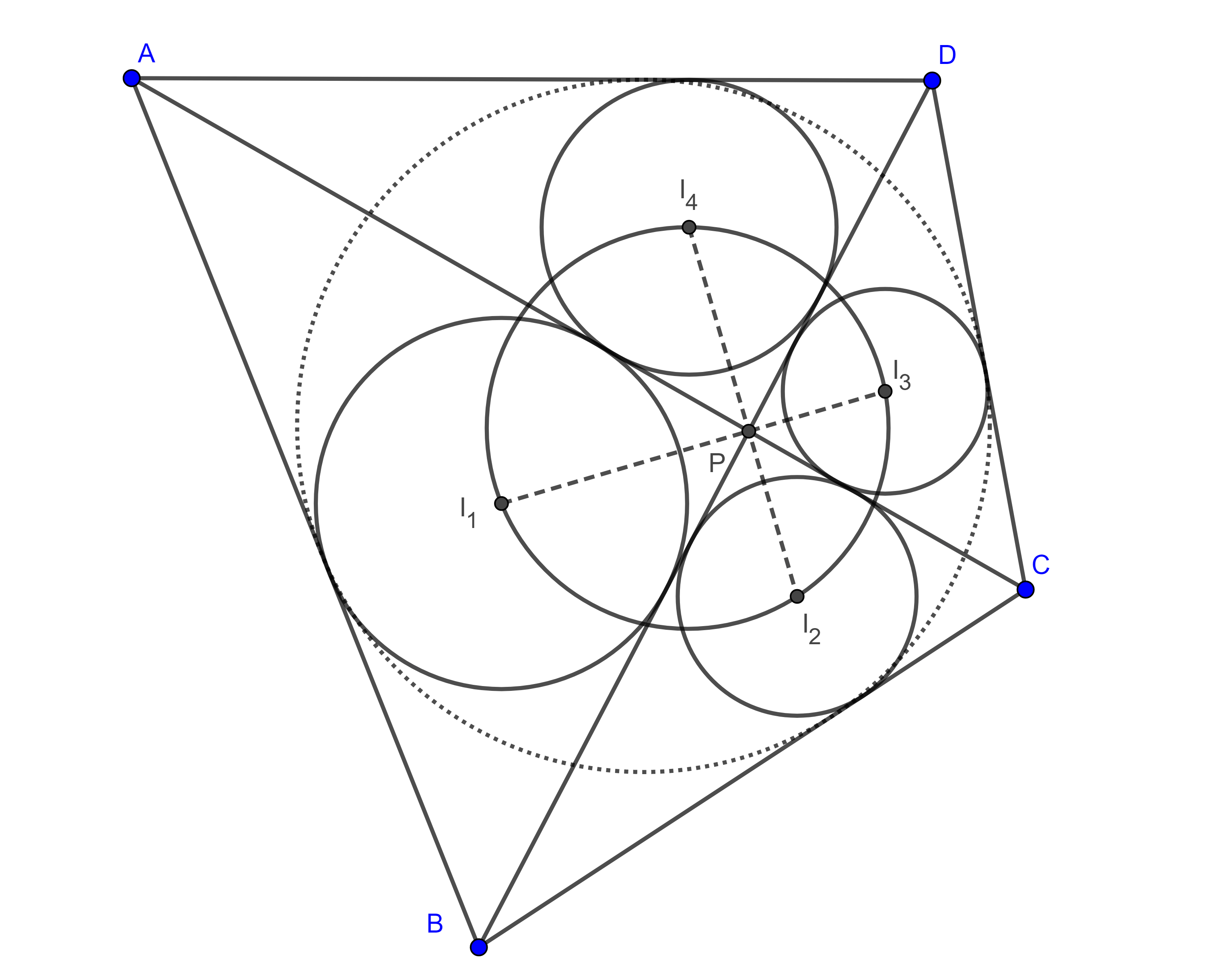
Teorema 6. Sean $\square ABCD$ circunscrito, $P$ la intersección de las diagonales, $I_{1}$, $I_{2}$, $I_{3}$ e $I_{4}$ los incentros de los triángulos $\triangle APB$, $\triangle BPC$, $\triangle CPD$ y $\triangle APD$ respectivamente entonces el cuadrilátero $\square I_{1}I_{2}I_{3} I_{4}$ es cíclico.
Demostración. Sean $r_{1}$, $r_{2}$, $r_{3}$ y $r_{4}$ los inradios de $\triangle APB$, $\triangle BPC$, $\triangle CPD$ y $\triangle APD$ respectivamente, notemos que $\angle APB = \angle CPD$ y $\angle BPC = \angle DPA$ pues son opuestos por el vértice, entonces $2(\angle APB + \angle DPA) = 2\pi \Leftrightarrow \dfrac{\angle APB + \angle DPA}{2} = \dfrac{\pi}{2}$ por lo que $\sin \dfrac{\angle APB}{2} = \cos \dfrac{\angle DPA}{2}$ y $\cos \dfrac{\angle APB}{2} = \sin \dfrac{\angle DPA}{2}$.
Figura 7
Aplicando el lema parte 1 a $\triangle APB$ y $\triangle CPD$ obtenemos $(AP + BP – AB) + (CP + DP – CD)$ $= 2 r_{1} \cot \dfrac{\angle APB}{2} + 2 r_{3} \cot \dfrac{\angle CPD}{2} = 2\cot \dfrac{\angle APB}{2}( r_{1} + r_{3})$.
Hacemos lo mismo con $\triangle BPC$ y $\triangle APD$, $(BP + CP – BC) + (DP + AP – AD) = 2\cot \dfrac{\angle DPA}{2}( r_{2} + r_{4})$.
Como $\square ABCD$ es circunscrito por el teorema 1, $AB + CD = BC + AD$ por lo que $(AP + BP – AB) + (CP + DP – CD) = (BP + CP – BC) + (DP + AP – AD)$.
Y por lo tanto, $2\cot \dfrac{\angle APB}{2}( r_{1} + r_{3}) = 2\cot \dfrac{\angle DPA}{2}( r_{2} + r_{4})$
Por otra parte aplicamos el lema parte 2 a $\triangle APB$ y $\triangle CPD$ $PI_{1} \times PI_{3} = \dfrac{r_{1}}{\sin \dfrac{\angle APB}{2}} \dfrac{r_{3}}{\sin \dfrac{\angle CPD}{2}} = \dfrac{ r_{1} r_{3}}{\sin^2 \dfrac{\angle APB}{2}}$.
Hacemos lo mismo con $\triangle BPC$ y $\triangle APD$ $PI_{2} \times PI_{4} = \dfrac{r_{2}}{\sin \dfrac{\angle BPC}{2}} \dfrac{r_{4}}{\sin \dfrac{\angle DPA}{2}} = \dfrac{ r_{2} r_{4}}{\sin^2 \dfrac{\angle DPA}{2}}$.
Realizamos el cociente de las dos últimas expresiones encontradas $\dfrac{PI_{2} \times PI_{4}}{PI_{1} \times PI_{3}} = \dfrac{r_{2} r_{4}}{\sin^2 \dfrac{\angle DPA}{2}} \dfrac{\sin^2 \dfrac{\angle APB}{2}}{r_{1} r_{3}} = \dfrac{r_{2} r_{4}}{r_{1} r_{3}} \dfrac{\sin^2 \dfrac{\angle APB}{2}}{\cos^2 \dfrac{\angle APB}{2}}$
Por el teorema 5, sabemos que $\dfrac{1}{r_{1}} + \dfrac{1}{ r_{3}} = \dfrac{1}{r_{2}} + \dfrac{1}{ r_{4}}$.
Por lo tanto, $\dfrac{PI_{2} \times PI_{4}}{ PI_{1} \times PI_{3}} = 1$ $\Leftrightarrow PI_{2} \times PI_{4} = PI_{1} \times PI_{3}$.
Como $P = I_1I_3 \cap I_2I_4$, pues estas rectas son las bisectrices interna y externa de $\angle APB$, por el teorema de las cuerdas, el cuadrilátero $\square I_1I_2I_3I_4$ es cíclico.
$\blacksquare$
Más adelante…
En la siguiente entrada estudiaremos características de los cuadriláteros que son tanto cíclicos como circunscritos.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
$i)$ Muestra que un cuadrilátero convexo es circunscrito si y solo si sus bisectrices internas son concurrentes. $ii)$ Prueba que todo rombo es circunscrito.
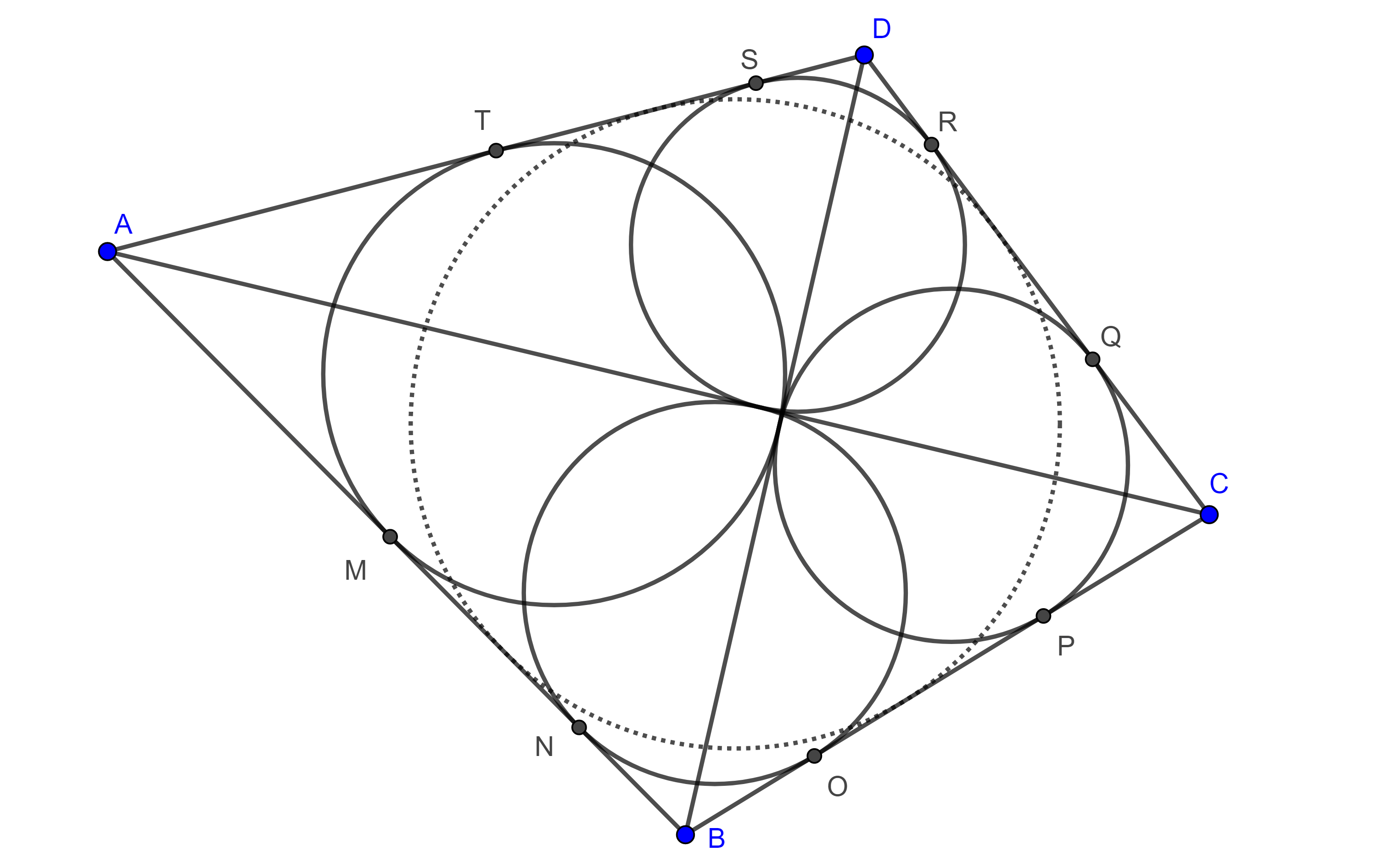
Muestra que $\square ABCD$ convexo, es circunscrito si y solo si los incírculos de los triángulos $\triangle ABC$ y $\triangle ACD$ son tangentes entre si.
Sea $\square ABCD$ convexo, consideremos los incirculos de los triángulos $\triangle ABD$, $\triangle ABC$, $\triangle BCD$ y $\triangle ADC$ que son tangentes a los lados del cuadrilátero en $M$, $T$, $N$, $O$, $P$, $Q$, y $R$, $S$ respectivamente, muestra que $\square ABCD$ es circunscrito si y solo si $MN + QR = OP + ST$.
Si $\square ABCD$ es circunscrito, con lados $a$, $b$, $c$ y $d$ muestra que: $i)$ $(\square ABCD) = \sqrt{abcd} \sin \dfrac{\angle A + \angle C}{2} = \sqrt{abcd} \sin \dfrac{\angle B + \angle D}{2}$, $ii)$ $(\square ABCD) \leq \sqrt{abcd}$.
Sean $\square ABCD$ circunscrito, $I$ el incentro del cuadrilátero y $P$ la intersección de las diagonales, muestra que los ortocentros de los triángulos $\triangle AIB$, $\triangle BIC$, $\triangle CID$, $\triangle AID$ y $P$ son colineales.
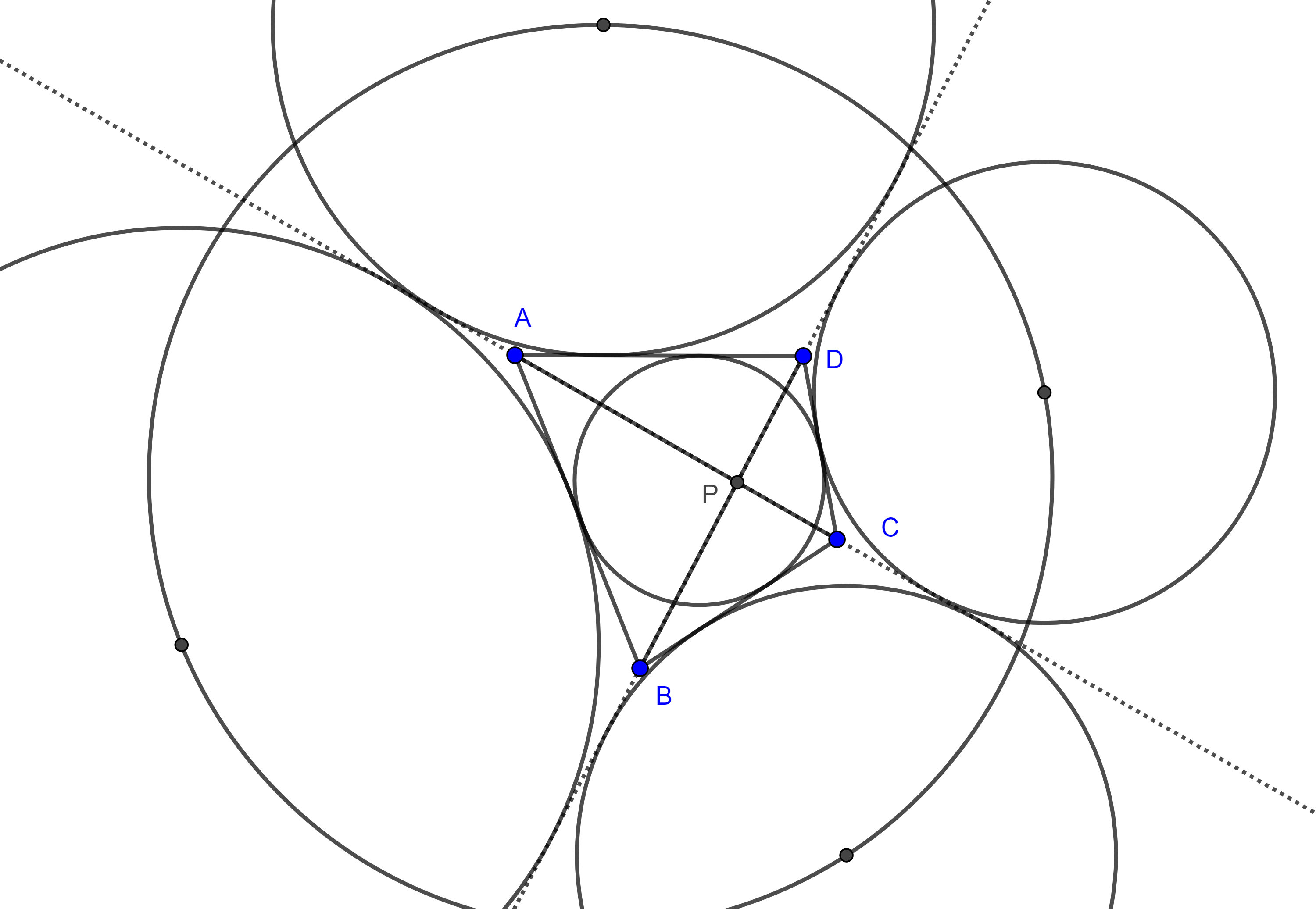
Sean $\square ABCD$ circunscrito y $P$ la intersección de sus diagonales, muestra que los centros de los excírculos de los triángulos $\triangle APB$, $\triangle BPC$, $\triangle CPD$ y $\triangle APD$ opuestos a $P$ forman un cuadrilátero cíclico.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En la entrada anterior resolvimos la ecuación diferencial de Euler, cerca del punto singular $t_{0}=0$, como un caso particular de las ecuaciones que consideraremos en esta ocasión. Vimos que la forma que tenga la solución general depende de las raíces de la ecuación cuadrática $r^{2}+(\alpha -1)r+\beta=0$.
Es turno de revisar el caso cuando queremos encontrar una solución en forma de serie cerca de un punto singular ecuación diferencial $$a_{0}(t)\frac{d^{2}y}{dt^{2}}+a_{1}(t)\frac{dy}{dt}+a_{2}(t)y=0.$$ Clasificaremos a los puntos singulares en dos tipos: regulares e irregulares. Debido a la complejidad para encontrar soluciones alrededor de puntos singulares irregulares, nos enfocaremos exclusivamente en los puntos singulares regulares, y trataremos de generalizar el método utilizado para resolver la ecuación de Euler, el cual lleva el nombre de método de Frobenius, gracias al matemático Ferdinand Georg Frobenius.
Para facilitar el desarrollo de la teoría, en esta entrada siempre supondremos que el punto singular regular sobre el que trabajaremos es $t_{0}=0$. En la práctica, si tenemos un punto singular $t_{0}\neq 0$, basta con hacer el cambio de variable $z=t-t_{0}$.
Consideraciones generales. Solución cuando la ecuación indicial tiene dos raíces distintas que no difieren por un entero
En el primer video, damos las definiciones de punto singular regular e irregular y damos las consideraciones generales con las que trabajaremos a lo largo de toda la entrada. Además presentamos la ecuación indicial de la cual depende la forma de la solución general a la ecuación $$a_{0}(t)\frac{d^{2}y}{dt^{2}}+a_{1}(t)\frac{dy}{dt}+a_{2}(t)y=0$$ cerca del punto singular regular $t_{0}=0$. Finalmente resolvemos el primer caso del método de Frobenius cuando la ecuación indicial $r^{2}+(b_{0}-1)r+c_{0}=0$ tiene raíces distintas que no difieren por un entero.
Solución cuando la ecuación indicial tienen raíces repetidas
En el segundo video resolvemos el segundo caso del método de Frobenius, cuando la ecuación indicial tiene dos raíces repetidas.
Solución cuando al ecuación indicial tiene raíces que difieren por un entero
Finalizamos esta serie de videos con el último caso del método de Frobenius, cuando la ecuación indicial tiene dos raíces que difieren por un entero.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Prueba que si $r_{1}$, $r_{2}$ son raíces complejas de la ecuación indicial $r^{2}+(b_{0}-1)r+c_{0}=0$, entonces $F(r_{1}+k)$ y $F(r_{2}+k)$ no se anulan para cualquier $k\geq1$. Por lo tanto la solución general a la ecuación diferencial tiene la misma forma que cuando consideramos raíces reales que no difieren por un entero, pero con valores complejos.
Encuentra una expresión para la solución general del ejercicio anterior pero con valores únicamente reales.
Muestra que las soluciones $y_{1}(t)$, $y_{2}(t)$ encontradas en el caso cuando la ecuación indicial tiene raíces repetidas, son linealmente independientes.
Encuentra los radios de convergencia para cada solución dada en forma de series en esta entrada. (Hint: Las demostraciones son análogas al caso de radios de convergencia para soluciones por series de potencias alrededor de puntos ordinarios).
Más adelante
Hemos concluido de desarrollar la teoría que involucra soluciones en series, tanto alrededor de un punto ordinario como cerca de un punto singular regular. Como te pudiste dar cuenta en esta entrada no resolvimos ejemplos, ya que en las siguientes entradas emplearemos esta teoría para resolver algunas ecuaciones especiales que se usan principalmente en la física. En la siguiente entrada en particular, estudiaremos las ecuaciones de Hermite y Laguerre.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»