(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
INTRODUCCIÓN
A partir del interés de establecer métodos para resolver ecuaciones de tercer grado por medio de radicales, los matemáticos se encuentran con las raíces negativas e imaginarias. El concepto de número imaginario logra superponerse al paradigma y encuentra su lugar a través de su representación geométrica.
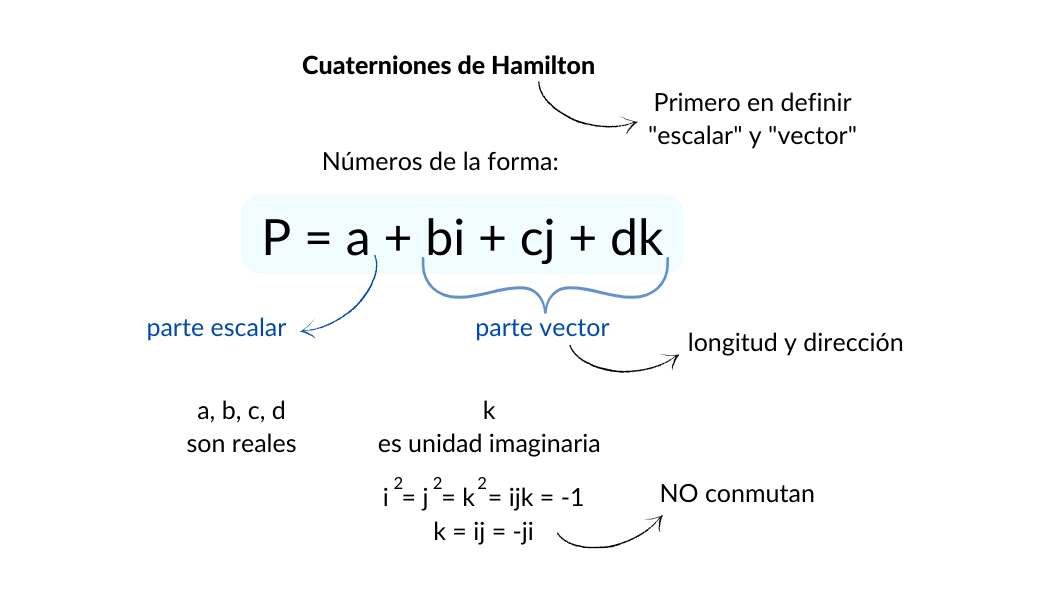
El físico William Rowan Hamilton se interesó por establecer propiedades de las operaciones entre números complejos y sostuvo que el álgebra tenía una relación muy estrecha con la física. Motivado con esta idea, establece conjuntos de números dotados de una estructura algebraica con una representación espacial muy útil para los trabajos en física. Sus propiedades resultan similares a las que actualmente se tienen para el producto escalar y vectorial.
Los cuaterniones de Hamilton son números de la forma: $P=a+bi+cj+dk$. Donde $a,b,c,d\in\mathbb{R}$ y $k=ij=-ji$ es una unidad imaginaria.
En el álgebra lineal el concepto de «vector» adquiere su significado más general.
ESPACIO VECTORIAL
Definición: Sean $V$ un conjunto y sea $K$ un campo (con las operaciones $+_K$ y $\cdot_K$). Sean $+_V: V \times V \longrightarrow V$ y $\cdot_V: K \times V \longrightarrow V$ operaciones. Decimos que $V,+_V,\cdot_V$ es un espacio vectorial sobre el campo $K$, o bien un $K$ – espacio vectorial (y a los elementos de $K$ les llamamos vectores), si $+_V$ y $\cdot_V$ cumplen lo siguiente:
$+_V$ es conmutativa $\forall u,v \in V:$ $(\,u+_V v=v+_V u\,)$
Existe neutro aditivo $\exists \theta_V \in V:$ $\forall u \in V (\,\theta_V +_V u = u +_V \theta_V = u\,)$
Todo elemento $u \in V$ tiene inverso aditivo $\forall u \in V:$ $\exists \tilde {u} \in V (\,u+_V \tilde {u} = \tilde {u} +_V u = \theta_V\,)$
$\forall u \in V:$ $1_K \cdot_V u = u$
$\forall \lambda,\mu \in K \forall u \in V:$ $\lambda\cdot_K(\mu\cdot_K u)=(\lambda\cdot_K\mu)\cdot_V u$
$\cdot_V$ es distributiva 7.1 $\forall \lambda,\mu \in K \forall u \in V:$ $(\lambda+_K\mu)\cdot_V u = (\lambda\cdot_V u)+(\mu\cdot_V u)$ 7.2 $\forall \lambda \in K \forall u,v \in K:$ $\lambda\cdot_V(u+v)=\lambda\cdot_V u+\lambda\cdot_V v$
Nota: Es común encontrar la expresión «$V$ es un $K$ – espacio vectorial con las operaciones $+, \cdot$» en lugar de «$V,+,\cdot$ es un $K$ – espacio vectorial», al igual que «$V$ es un $K$ – espacio vectorial» sin la referencia a las operaciones cuando se trata de las usuales (se suponen por obviedad).
Nota: Para evitar confusiones, en caso de ser necesario, denotaremos por $u +_V v$ a la suma de los vectores $u$ y $v$, y por $\lambda\cdot_V v$ al producto del escalar $\lambda$ por el vector $v$, pero una vez que nos habituemos a ellas las denotaremos simplemente por $u+v$ y $\lambda v$.
Ejemplos:
$\mathbb{R}^n$ es un $\mathbb{R}$ – espacio vectorial con la suma y el producto por escalar usuales.
$<(1,1,1)> = \{\lambda(1,1,1):\lambda \in \mathbb{R} \}$ es un $\mathbb{R}^n$ – espacio vectorial.
Sea $K$ campo. $\mathcal{M}_{m\times n}(K)$ (las matrices con $m$ renglones y $n$ columnas, con entradas en $K$) es un $K$ – espacio vectorial con las operaciones usuales de suma y producto por escalar.
Sea $K$ campo. $K[x]$ (los polinomios en $x$ con coeficientes en $K$) es un $K$ – espacio vectorial con la suma y el producto por escalar usuales.
Sea $K$ campo. $K^{n} = \{(x_{1}, x_{2},…,x_{n}) : x_{1},x_{2},…,x_{n} \in K \}$ es un $K$ – espacio vectorial con la suma entrada a entrada y el producto definido como sigue: Sean $(x_{1},x_{2},…,x_{n}) \in K^{n}$, $\lambda \in K$. $\lambda \cdot (x_{1},x_{2},…,x_{n})$ $=(\lambda x_{1}, \lambda x_{2},…,\lambda x_{n})$
Sea $K$ campo. $K^{\infty} = \{(x_{1}, x_{2},…) : x_{1},x_{2},… \in K \}$ es un $K$ – espacio vectorial con la suma entrada a entrada y el producto definido como sigue: Sean $(x_{1},x_{2},…) \in K^{n}$, $\lambda \in K$. $\lambda \cdot (x_{1},x_{2},…)$ $=(\lambda x_{1}, \lambda x_{2},…)$
EJEMPLO FUNCIONES
Sea $K$ campo. $V=\{f|f:K \longrightarrow K\}$ es un $K$ – espacio vectorial con las operaciones $+_V$ y $\cdot_V$ definidas como sigue:
Sean $f,g \in V$, $\lambda \in K$. $f +_V g : K \longrightarrow K$ $(f +_V g )(x) = f(x) +_K g(x)$ para todo $x\in K$ donde $+_K$ es la suma en $K$.
Sean $f \in V$, $\lambda \in K$. $\lambda \cdot_V f : K \longrightarrow K$ $(\lambda \cdot_V f )(x) =\lambda \cdot_K f(x)$ para todo $x\in K$ donde $\cdot_K$ es el producto en $K$.
DEMOSTRACIÓN
Vamos a ver que las operaciones $+_V$, $\cdot_V$ cumplen las ocho condiciones suficientes y necesarias (por definición) para que $V$ sea espacio vectorial:
P.D. $+_V$ es asociativa $i. e.$ $(f +_V g) +_V h = f +_V (g +_V h)$
Observación 1: Tenemos que $f +_V g, g +_V h \in V$. Así, $(f +_V g) +_V h, f +_V (g +_V h) \in V$. Así que sólo falta ver que $(f +_V g) +_V h$ y $f +_V (g +_V h)$ tienen la misma regla de correspondencia.
P.D. $+_V$ es conmutativa $i.e.$ $f +_V g = g +_V f$
Observación 2: Tenemos que $f +_V g, g +_V f \in V$. Así que sólo falta ver que $f +_V g$ y $g +_V f$ tienen la misma regla de correspondencia.
$\begin{align*} (f +_V g)(x) &= f(x) +_K g(x)\tag{def. $+_V$}\\ &= g(x) +_K f(x)\tag{conmutat. $+_K$}\\ &= (g +_V f)(x)\tag{def. $+_V$}\\ \therefore f +_V g &= g +_V f \end{align*}$
P.D. Existe neutro aditivo $i.e.$ $\exists \theta_V \in V:$ $\theta_V +_V f = f +_V \theta_V = f$
Proponemos: $\theta_V : K \longrightarrow K$ con $\theta_V(x) = 0_K$ para todo $x\in K$ donde $0_K$ es neutro aditivo de $K$.
Observación 3: Por construcción $\theta_V \in V$. Así, $f +_V \theta_V, \theta_V +_V f \in V$. Además, por $2$, se cumple que $\forall f \in V (\theta_V +_V f = f +_V \theta_V)$. Entonces sólo falta ver que $f +_V \theta_V$ y $f$ tienen la misma regla de correspondencia.
P.D. Todo elemento $f \in V$ tiene inverso aditivo $i.e.$ $\exists \tilde{f} \in V:$ $f+ \tilde{f} = \tilde{f} + f = \theta_V$
Proponemos: $\tilde{f} : K \longrightarrow K$ con $\tilde{f}(x)=(-f(x))$ para todo $x\in K$ donde $(-f(x))$ es el inverso aditivo de $f(x) \in K$.
Observación 4: Por construcción $\tilde{f} \in V$. Así, $f +_V \tilde{f}, \tilde{f} +_V f \in V$. Además, por $2$, se cumple que $\forall f \in V (f +_V \tilde{f} = \tilde{f} +_V f \in V)$. Entonces sólo falta ver que $f +_V \tilde{f}$ y $\theta_V$ tienen la misma regla de correspondencia.
Observación 5: Por construcción $1_K \in K$. Así, $1_K \cdot_V f \in V$. Así que sólo falta ver que $1_K \cdot_V f$ y $f$ tienen la misma regla de correspondencia.
$\begin{align*} (1_K \cdot_V f)(x) &= 1_K \cdot_K f(x)\tag{def. $\cdot_V$}\\ &= f(x)\tag{neut. mult.}\\ \therefore 1_V \cdot_V f = f \end{align*}$
Observación 6: Por construcción $\mu\cdot_V f \in V$. Así, $\lambda\cdot_V(\mu\cdot_V f) \in V$. También tenemos que $\lambda\cdot_K\mu\in K,$ por lo cual $(\lambda\cdot_K\mu)\cdot_V f\in V$ Entonces sólo falta ver que $\lambda\cdot_V(\mu\cdot_V f)$ y $(\lambda\cdot_K\mu)\cdot_V f$ tienen la misma regla de correspondencia.
P.D. Se cumple la distributividad (7.1) $i.e.$ $(\lambda +_K \mu)\cdot_V f=(\lambda\cdot_V f) +_V (\mu\cdot_V f)$
Observación 7: Tenemos que $\lambda,\mu,\lambda +_K \mu \in K$. Así, $(\lambda +_K \mu)\cdot_V f, (\lambda\cdot_V f) +_V (\mu\cdot_V f) \in V$. Así que solo falta ver que $(\lambda +_K \mu)\cdot_V f$ y $(\lambda\cdot_V f) +_V (\mu\cdot_V f)$ tienen la misma regla de correspondencia.
P.D. Se cumple la distributividad (7.2) $i.e.$ $\lambda \cdot_V (f +_V g)= (\lambda \cdot_V f) +_V(\lambda \cdot_V g)$
Observación 8: Tenemos que $\lambda \cdot_V (f +_V g), \lambda \cdot_V f, \lambda \cdot_V g \in V$. Así, $(\lambda \cdot_V f) +_V(\lambda \cdot_V g) \in V$. Entonces sólo falta ver que $\lambda \cdot_V (f +_V g)$ y $(\lambda \cdot_V f) +_V(\lambda \cdot_V g)$ tienen la misma regla de correspondencia.
Por lo tanto $V=\{f|f:K \longrightarrow K\}$ es un $K$ – espacio vectorial con las operaciones $+_V$ y $\cdot_V$ trabajadas.
TAREA MORAL
Encuentra un $K$ campo dentro de los ejemplos de la entrada anterior con el cual $\mathcal{M}_{m\times n}(K)$ sea un $K$ – espacio vectorial con una cantidad finita de elementos. Si $K$ no es concreto, exhibe un caso particular de ese campo y una vez que lo hagas, muestra todos los elementos del espacio vectorial obtenido.
Demuestra que el neutro aditivo de $V$, un $K$ – espacio vectorial, es único. Para lograrlo, se te sugiere realizar lo siguiente:
Sabemos por la definición de espacio vectorial, que existe $\theta_V$ neutro.
Primero supongamos que existe ${\theta_V}’ \in V$ que también lo es. Con el objetivo de demostrar que $\theta_V = {\theta_V}’$.
Ahora justifica cada una de las siguientes igualdades: $\theta_V = \theta_V +_V {\theta_V}’ = {\theta_V}’$
Demuestra que los inversos aditivos en $V$ son únicos. Para lograrlo, se te sugiere realizar lo siguiente:
Sea $u \in V$. Sabemos por la definición de campo, que existe $\tilde{u} \in V$ inverso aditivo de $u$.
Primero supongamos que existe $\tilde{u}’ \in V$ que también lo es. Con el objetivo de demostrar que $\tilde{u} = \tilde{u}’$.
Ahora justifica cada una de las siguientes igualdades: $\tilde{u} = \tilde{u} +_V \theta_V = \tilde{u} + (u + \tilde{u}’) = (\tilde{u} + u) + \tilde{u}’$
Completa la demostración con las igualdades necesarias y justifícalas.
MÁS ADELANTE…
Ahora analizaremos algunas propiedades de los espacios vectoriales, una de ellas nos dice quién es el elemento neutro dado el espacio vectorial. Además de dos identidades del elemento neutro.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
INTRODUCCIÓN
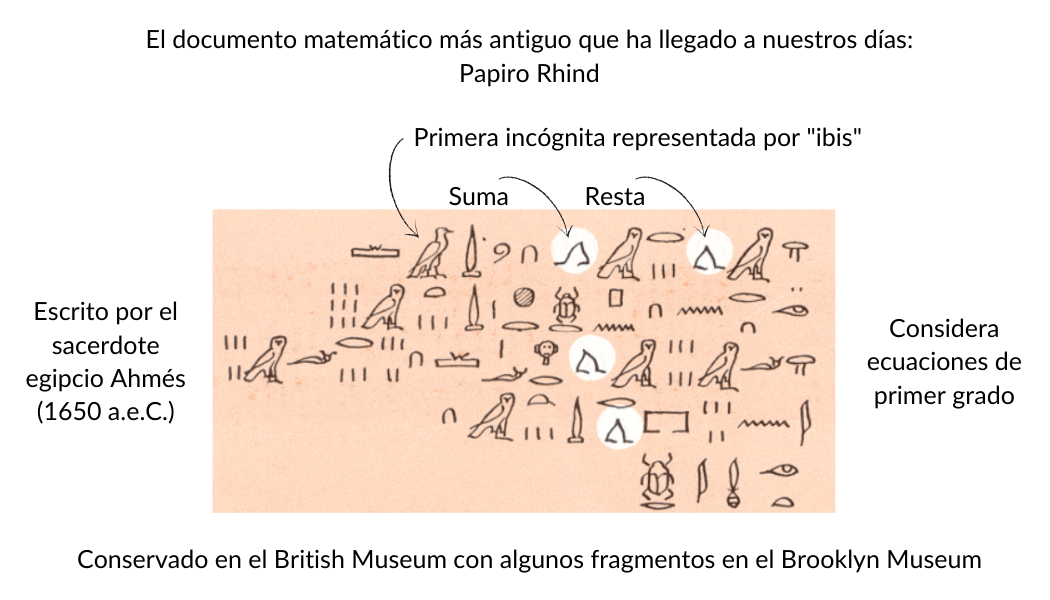
El ser humano ha hecho un fascinante trabajo construyendo modelos para facilitar la resolución de problemas concretos. Muchos de estos problemas tienen un carácter lineal, es decir, pueden plantearse mediante ecuaciones lineales con coeficientes en algún «conjunto especial» de números y con unas cuantas variables.
El Papiro Rhind considera ecuaciones de primer grado y es el documento matemático más antiguo hallado.
Así es, nos facilitamos la vida reduciendo casi todo a «talachita»: operaciones. Y como buena rama de las matemáticas, esto de «operar» vamos a abstraerlo. Ya no sólo se tratará de números, si no de conjuntos (de «lo que sea») y operaciones («las que sean») que cumplan ciertas condiciones.
CAMPO
Definición: Sea $K$ un conjunto con dos operaciones binarias $+: K \times K \longrightarrow K$ y $\cdot: K \times K \longrightarrow K$. Decimos que $K$ es un campo (y a sus elementos los llamamos escalares) si se cumplen las siguientes propiedades:
$+$ es asociativa $\forall \alpha ,\beta ,\gamma \in K:$ $\alpha+(\beta+\gamma)=(\alpha+\beta)+\gamma$
$+$ es conmutativa $\forall \alpha,\beta \in K:$ $\alpha+\beta=\beta+\alpha$
Existe un neutro aditivo $\exists 0_K \in K:$ $\forall \alpha \in K (0_K + \alpha = \alpha + 0_K = \alpha)$
Todo elemento $\alpha \in K$ tiene un inverso aditivo $\forall \alpha \in K:$ $\exists (-\alpha) \in K (\alpha+ (-\alpha) = (-\alpha)+\alpha = 0_K)$
$\cdot$ es asociativa $\forall \alpha,\beta,\gamma \in K:$ $\alpha\cdot(\beta\cdot\gamma)=(\alpha\cdot\beta)\cdot\gamma$
$\cdot$ es conmutativa $\forall \alpha,\beta \in K:$ $\alpha\cdot\beta=\beta\cdot\alpha$
Existe un neutro multiplicativo $\exists 1_K \not= 0_K \in K:$ $\forall \alpha \in K (1_K \cdot \alpha = \alpha \cdot 1_K = \alpha)$
Todo elemento $\alpha \not= 0_K \in K$ tiene un inverso multiplicativo $\forall \alpha \not= 0_K \in K:$ $\exists \alpha^{-1} \in K (\alpha \cdot \alpha^{-1} = \alpha^{-1} \cdot \alpha = 1_K)$
Nota: En un campo vectorial: los neutros (aditivo y multiplicativo) y los inversos (aditivos y multiplicativos) son únicos. Por ello, desde la definición se han denotado de esa manera. Como parte de la tarea moral al final de esta entrada encontrarás ideas para realizar las demostraciones de estas unicidades.
Nota: Para simplificar notación, el producto $\alpha\cdot\beta$ se suele denotar como $\alpha\beta$.
Nota: Si es necesario aclarar que las operaciones con las que se está trabajando están definidas en el campo $K$, se suelen denotar como $+_K$ y $\cdot_K$.
Ejemplos:
$\mathbb{R} , \mathbb{Q} , \mathbb{C}$ con la suma y producto usual respectivamente
$\{y+y\sqrt{2} : x,y \in \mathbb{Q}\}$ con la suma y el producto usual
$\mathbb{Z}_p = \{\overline {0},\overline {1},…,\overline {p-1}\}$ donde $p$ es primo y $\forall \overline {x}, \overline {y} \in \mathbb{Z}_p$ las operaciones son $\overline {x} + \overline {y} = \overline {x+y}$ $\overline {x} \cdot \overline{y} = \overline {x \cdot y}$ con $x+y$ la suma usual en $\mathbb{Z}$, $x \cdot y$ el producto usual en $\mathbb{Z}$
¿Cómo funciona $\mathbb{Z}_n$ con $n \in \mathbb{N}$?
$\mathbb{Z}_n$ con $n\in\mathbb{N}^+$ es el conjunto llamado enteros módulo $n$ cuyos $n$ elementos son de la forma $\overline {k}$ $= \{a \in \mathbb{Z} | a \equiv k (mód\, n) \}$ $= \{a \in \mathbb{Z} | a – k = mn, m \in \mathbb{Z} \}$. Es decir, la clase de $k$, con $k \in \mathbb{Z}$ es el conjunto de los números enteros $a$ tales que $a-k$ es múltiplo de $n$.
Observación*: $\overline {k} = \overline {l}$ para toda $l \equiv k$ $(mód\, n)$ pues los elementos de $\overline {k}$ son aquellos congruentes entre sí, módulo $n$.
El único neutro multiplicativo es $\overline {1}$.
Dado $\overline {k} \in \mathbb{Z}_3$ su único inverso aditivo es $\overline {-k}$.
Dado $\overline {k} \not= \overline {0} \in \mathbb{Z}_3$ su único inverso multiplicativo es $\overline {k}$
Existencia y exhibición de inversos multiplicativos en $\mathbb{Z}_p$
Ahora veamos un resultado que será muy útil para entender por qué $\mathbb{Z}_n$ con $n \in \mathbb{N}^+$ es un campo si y sólo si $n$ es un primo y para saber cómo obtener el inverso multiplicativo de un elemento dado.
Sea $K=\mathbb{Z}_n$. Sea $\overline{k}\not= 0_K\in K$. Con el fin de simplificar la demostración, tomaremos $k\in\{0,1,…,n-1\}$ recordando que, de este modo, estamos considerando cualquier posible elemento de $\mathbb{Z}_n$. $\overline{k}$ tiene inverso $\overline{j}\in K$ si y sólo si
Para que $K = \mathbb{Z}_n$ sea un campo, necesitamos que cada $\overline {k} \not= 0_K \in K$ tenga inverso multiplicativo. Por lo tanto se debe cumplir que $(k,n) = 1$ para toda $k \in \{ 0, 1, …, n-1 \}$. Notamos que si $n$ no fuera primo, entonces $n = ab$ con $2 \le a,b \le n-1$. De modo que existe $a \in \{ 1, …, n-1 \}$ tal que $(a,n) = a \not= 1$ y entonces en este caso $K = \mathbb{Z}_n$ no es un campo. A la inversa, si $K = \mathbb{Z}_p$ con $p$ un primo, entonces para cada $a \in \{1, …, n-1 \}$ tenemos que $(a,p)=1$, y por lo anterior $\overline {a}$ tiene un inverso multiplicativo. Así, $K = \mathbb{Z}_p$ es un campo.
Además, dado $\overline {k} \not= \overline {0} \in \mathbb{Z}_p$ con $p$ primo, sabemos, por ser $\mathbb{Z}_p$ un campo, que existe su inverso multiplicativo $\overline {j} \in \mathbb{Z}_p$ y se cumple que $(k,n) = 1$. Para encontrar el inverso multiplicativo de $\overline {k}$ bastaría encontrar $l,m \in \mathbb{Z}$ tales que $k \cdot l + m \cdot n = 1$, para lo cual podemos usar el algorimo de Euclides, y así obtendremos que si tomamos $j=l$, entonces $\overline {j}$ es el elemento que queríamos.
SUBCAMPO
Definición: Sean $K$ un campo y $\tilde {K} \subseteq K$. Decimos que $\tilde {K}$ es unsubcampo de $K$si $\tilde {K}$ con las operaciones restringidas de $K$ es por sí mismo un campo.
Ejemplos:
$\mathbb{Q}$ es un subcampo de $\mathbb{R}$
$\mathbb{R}$ es un subcampo de $\mathbb{C}$
Propiedad
Si $K$ es un campo, entonces cualquiera de sus elementos $\alpha$ cumple que $\alpha \cdot 0_K = 0_K$.
Demostración: Sea $\alpha \in K$. Sea $(-\alpha) \in K$ su inverso aditivo. Como $0_K$ es el neutro aditivo, $0_K + 0_K = 0_K$. De donde:
Nota: Es por esta afirmación que se definen los inversos multiplicativos para los elementos distintos de $0_K$.
Característica de un campo
Definición: Sea $K$ un campo. Se le llama característica de $K$, y se denota como $car(K)$ al menor número natural $n$ tal que $\underbrace{1_K + … + 1_K}_{n} = 0_K$ si acaso existe. En caso contrario, decimos que $car(K)$ es cero.
Observación: La característica de un campo no puede ser 1 (es decir, si no es cero, entonces es mayor o igual a 2) pues por definición $1_K \not= 0_K$. Y más que eso, resulta que si no es cero, entonces es un número primo.
Ejemplos:
$car(\mathbb{Z}_p) = p$ donde $p$ es primo.
Justificación: Sea $K = \mathbb{Z}_p$ $= \{\overline {0},\overline {1},…,\overline {p-1}\}$ con cada uno de esos elementos distintos entre sí. De modo que $p$ es el mínimo natural tal que $\underbrace{1_K + … + 1_K}_{p} = \underbrace{\overline{1} + … + \overline{1}}_{p}$ $= \overline {\underbrace{1 + … + 1}_{p}} = \overline{p} = \overline{0}$
Justificación: Sea $K\in \{\mathbb{Q}, \mathbb{R},\mathbb{C} \}$. $\underbrace{1_K + … + 1_K}_{n} = n \cdot (1_K)$ $= n \not= 0_K$ $\forall n \in \mathbb{N}, n \not=0$
Propiedades
Si $K$ es un campo tal que $car(K) = 0$, entonces $K$ no tiene cardinalidad finita.
Demostración: Como $car(K) = 0$, entonces $\underbrace{1_K + … + 1_K}_{n} \not= 0_K \in K$ para cualquier $n \in \mathbb{N}$. Así, $\{ 1_K, 1_K + 1_K, …, \underbrace{1_K + … + 1_K}_{n}, … \} \subseteq K$ y no es difícil concluir que cada uno de los elementos de este subconjunto son distintos, de modo que tiene cardinalidad no finita.
Si $K$ es un campo tal que $car(K) = 2$, entonces $\alpha + \alpha = 0_K$ para cualquier $\alpha \in K$.
Demostración: Por ser $1_K \in K$ el neutro aditivo de $K$ y por las propiedades de campo obtenemos que $\alpha + \alpha = 1_K \cdot (\alpha + \alpha)$ $= 1_K \cdot \alpha + 1_K \cdot \alpha$ $= \alpha \cdot 1_K + \alpha \cdot 1_K$ $= \alpha \cdot (1_K + 1_K)$ Como $car(K) = 2$, entonces $1_K + 1_K = 0_K$, por lo cual $\alpha \cdot (1_K + 1_K)$ $= \alpha \cdot 0_K = 0_K$
En general, si $K$ es un campo tal que $car(K) = n \not= 0_K$, entonces $\underbrace{\alpha +…+ \alpha}_{n} = 0_K$ para cualquier $\alpha \in K$.
Demostración: Por ser $1_K \in K$ el neutro aditivo de $K$ y por las propiedades de campo obtenemos que $\underbrace{ \alpha + … + \alpha }_{n} = 1_K \cdot (\underbrace{ \alpha + … + \alpha }_{n})$ $= \underbrace{ 1_K \cdot \alpha +…+ 1_K \cdot \alpha}_{n}$ $= \underbrace{ \alpha \cdot 1_K +…+ \alpha \cdot 1_K}_{n}$ $=\alpha \cdot ( \underbrace{ 1_K +…+ 1_K}_{n})$. Como $car(K) = n$, entonces $\underbrace{ 1_K +…+ 1_K}_{n} = 0_K$, por lo cual $\alpha \cdot ( \underbrace{ 1_K +…+ 1_K}_{n})$ $= \alpha \cdot 0_K = 0_K$
Tarea Moral
Sea $K$ un campo. Demuestra la unicidad de:
El neutro aditivo en $K$. Para lograrlo, se te sugiere realizar lo siguiente:
Sabemos por la definición de campo, que existe $0_K$ neutro aditivo.
Primero sup. que existe ${0_K}’ \in K$ que también lo es. Con el objetivo de demostrar que $0_K = {0_K}’$.
Ahora justifica cada una de las siguientes igualdades: $0_K = 0_K + {0_K}’ = {0_K}’$
Los inversos aditivos en $K$. Para lograrlo, se te sugiere realizar lo siguiente:
Sea $\alpha \in K$. Sabemos por la definición de campo, que existe $(-\alpha) \in K$ inverso aditivo de $\alpha$.
Primero sup. que existe $(-\alpha)’ \in K$ que también lo es. Con el objetivo de demostrar que $(-\alpha) = (-\alpha)’$.
Ahora justifica cada una de las siguientes igualdades: $(-\alpha) = (-\alpha) + 0_K$ $= (-\alpha) + (\alpha + (-\alpha)’)$ $= ((-\alpha) + (\alpha)) + (-\alpha)’$
Completa la demostración con las igualdades necesarias y justifícalas.
El neutro multiplicativo en $K$. Para lograrlo, se te sugiere realizar igualdades análogas al neutro aditivo y justificar cada una.
Los inversos multiplicativos en $K$. Para lograrlo, se te sugiere realizar igualdades análogas a los inversos aditivos y justificar cada una.
Más adelante…
Ahora el concepto de campo vamos a usarlo para obtener un nuevo concepto básico y central en este curso: espacio vectorial.
En la entrada anterior definimos a las relaciones de equivalencia, con lo cual ahora tenemos las bases para definir otros conceptos. Esta entrada estará dedicada a dos nociones nuevas a las que llamaremos clases de equivalencia y particiones. Dichos conjuntos nos permitirán agrupar a los elementos de un conjunto.
Clases de equivalencia
En la entrada anterior hemos usado la notación de pares para referirnos a los elementos de una relación. En esta entrada será más conveniente cambiar a la notación en la que ponemos a la relación entre dos elementos. Como recordatorio, esto quiere decir que para un conjunto $A$ y una relación $R$ en $A$, en vez de escribir $(a,b)\in R$, simplemente escribiremos $aRb$. Una versión abreviada de las propiedades de relación de equivalencia en esta notación es la siguiente:
Para todo $a\in A$ se tiene $aRa$.
Para $a,b\in X$ si $aRb$, entonces $bRa$.
Para $a,b,c\in A$ si $aRb$ y $bRc$, entonces $aRc$.
La primera noción nueva que estudiaremos es la siguiente.
Definición. Sea $R$ una relación de equivalencia en $A$. Dado $a\in A$, definimos la clase de equivalencia de $a$ con respecto a $R$, como:
$[a]_R=\set{x\in A: aRx}$.
Observación. Si $A$ es un conjunto no vacío, entonces, para cada $a\in A$ se tiene $[a]_R\not=\emptyset$ pues $aRa$ (por reflexividad de $R$).
Ejemplo.
Consideremos al conjunto $A=\set{a,b,c}$ y $R$ la relación de equivalencia en $A$ dada por $R=\set{(a,a), (b,b),(c,c), (a,b), (b,a)}$. Veamos cuáles son las clases de equivalencia de cada uno de los elementos de $A$.
Del ejemplo anterior podemos notar que es posible que dos clases de equivalencia sean iguales. En ese ejemplo, tenemos que $[a]_{R}=[b]_{R}$, por lo que podemos considerar únicamente a un representante para estás clases, es decir, las clases distintas de $R$ estarán dadas por $[a]_R$ y $[c]_R$, pues $[a]_R$ representa tanto a $[a]_R$ como a $[b]_R$. Para formalizar estas ideas, podemos introducir la siguiente definición.
Definición. Sea $R$ una relación de equivalencia en $A$. Decimos que $S\subseteq A$ es un conjunto completo de representantes con respecto a $R$, si se satisfacen las siguientes condiciones:
Para cualesquiera $a,b\in S$, se tiene que $[a]_R\cap [b]_R=\emptyset$ si $a\not=b$,
$\bigcup_{a\in S}[a]_R=A$.
Ejemplo.
Sea $X=\set{1,2}$. Consideremos las relaciones $R_1=\set{(1,1),(2,2)}$ y $R_2=\set{(1,1),(2,2),(1,2),(2,1)}$ en $X$. Las relaciones $R_1$ y $R_2$ son relaciones de equivalencia en $X$. Luego, un conjunto completo de representantes con respecto a $R_1$ es $S_1=\set{1,2}$ y un conjunto completo de representantes con respecto a $R_2$ es $S_2=\set{1}$.
Ejemplo.
Sea $X$ un conjunto no vacío y consideremos la relación $R=\set{(x,x):x\in X}$. Ciertamente $R$ es una relación de equivalencia en $X$, y un conjunto completo de representantes respecto a $R$ es $S=X$.
¿Será que para cualquier relación de equivalencia podremos encontar un conjunto completo de representantes? La respuesta es que sí, pero todavía no podemos demostrarlo. Se logrará hasta que introduzcamos el axioma de elección. Para seguir desarrollando tu intuición de por qué, piensa en qué sucedería si el conjunto $A$ en donde está la relación de equivalencia $R$ es infinito, y se tiene que todas las clases de equivalencia tienen dos elementos (digamos). Nuevamente, tenemos que elegir una infinidad de veces uno de los dos elementos. Para hacer estas elecciones infinitas es que se necesita el axioma de elección.
Teorema.1 Sea $R$ una relación de equivalencia en $A$ y sean $a,b\in A$. Las siguientes propiedades son equivalentes:
$aRb$,
$[a]_R=[b]_R$,
$[a]_R\cap[b]_R\not=\emptyset$.
Demostración.
$1)\rightarrow 2)$ Supongamos que $aRb$. Veamos que $[a]_R=[b]_R$.
$\subseteq]$ Sea $x\in [a]_R$, entonces $aRx$. Luego, como $aRb$ y $R$ es una relación simétrica entonces $bRa$. Así, $bRa$ y $aRx$ y por la transitividad de $R$ se tiene que $bRx$ y así, $x\in [b]_R$.
Por lo tanto, $[a]_R\subseteq [b]_R$.
$\supseteq]$ Sea $x\in [b]_R$, entonces $bRx$. Luego, como $aRb$ y $bRx$ se tiene por transitividad de $R$ que $aRx$ y así, $x\in [a]_R$.
Por lo tanto, $[b]_R\subseteq [a]_R$. Concluimos entonces que si $aRb$ entonces $[a]_R=[b]_R$.
$2)\rightarrow 3)$ Supongamos que $[a]_R=[b]_R$ entonces $[a]_R\cap[b]_R=[a]_R\not=\emptyset$ pues por la observación, $a\in [a]_R$.
$3)\rightarrow 1)$ Supongamos que $[a]_R\cap[b]_R\not=\emptyset$. Veamos que $aRb$.
Dado que $[a]_R\cap [b]_R\not=\emptyset$, existe $x\in [a]_R\cap[b]_R$, es decir existe $x$ tal que $x\in[a]_R$ y $x\in [b]_R$. Entonces $aRx$ y $bRx$. Por lo tanto, $aRx$ y $xRb$ por la propiedad simétrica. Luego, $aRb$ por transitividad.
Por lo tanto, si $[a]_R\cap[b]_R\not=\emptyset$ entonces $aRb$.
Por lo tanto, $1)$, $2)$ y $3)$ son enunciados equivalentes.
$\square$
Particiones
A continuación definiremos qué es una partición de un conjunto. A grandes rasgos, se refiere a «fragmentar» un conjunto. Este concepto estará muy relacionado con el de las clases de equivancia de un conjunto completo de representantes.
Definición. Sean $A$ un conjunto no vacío y $P\subseteq \mathcal{P}(A)$. Decimos que $P$ es una partición de $A$ si cumple las siguientes condiciones:
$B\not=\emptyset$ para todo $B\in P$,
$B\cap C=\emptyset$ para cualesquiera $B,C\in P$ si $B\not=C$,
$\bigcup P=A$.
Ejemplo.
Sea $X=\set{1,2,3,4}$. Consideremos a la siguiente colección de subconjuntos de $X$, $P=\set{\set{x}:x\in X}$.
Veamos que $P$ es una partición de $X$:
Dado que para todo $x\in X$ se cumple que $x\in \set{x}$ tenemos que $\set{x}\not=\emptyset$.
Ahora, como $P=\set{\set{x}:x\in X}=\set{\set{1},\set{2}, \set{3}, \set{4}}$ se cumple que para cualquier $x,y\in X$ tales que $\set{x}\not=\set{y}$, $\set{x}\cap\set{y}=\emptyset$.
A continuación se muestra el primero de varios resultados que vinculan a las relaciones de equivalencia con las particiones.
Teorema.2 Sea $R$ una relación de equivalencia en $A$ un conjunto no vacío. Si $S$ es un conjunto completo de representantes respecto a la relación $R$, entonces $\set{[a]_R: a\in S}$ es una partición de $A$.
Demostración.
Veamos que $\set{[a]_R:a\in S}$ es una partición de $A$. En efecto,
Sea $a\in S\subseteq A$, entonces $aRa$ por reflexividad de $R$ y por lo tanto $a\in [a]_R$. De este modo, para cualquier $a\in S$ se cumple que $[a]_R\not=\emptyset$.
Ahora, sean $a,b\in S$ tales que $a\not=b$. Por definición de conjunto completo de representantes se sigue que $[a]_R\cap [b]_R=\emptyset$.
Finalmente, tenemos por definición que $\bigcup_{a\in S}[a]_R=A$.
Por lo tanto, $\set{[a]_R:a\in S}$ es una partición de $A$.
$\square$
Tarea moral
Sea $A=\set{1,2,3,4}$. Da una partición del conjunto $A$ y verifica que en efecto es una partición.
Sea $A=\set{1,2,3,4,5}$ y sea $R$ una relación de equivalencia en $A$ dada por $R=\set{(1,1), (2,2), (3,3), (4,4), (5,5)}$. Escribe las clases de equivalencia de $A$ con respecto a $R$.
Sea $A=\set{1,2,3}$ y sea $R$ una relación de equivalencia en $A$ dada por $R=\set{(1,1), (2,2), (3,3), (1,2), (2,1)}$. Encuentra a un conjunto completo de representantes.
Sean $R$ y $S$ relaciones de equivalencia en $X$. Demuestra que para cada $x\in X$ se tiene que $[x]_{R\cap S}=[x]_R\cap [x]_S$.
Más adelante…
En la siguiente entrada estableceremos otras conexiones de relaciones de equivalencia con particiones. Lo haremos a través de definir a una nueva noción llamada conjunto cociente.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
También puedes consultar la prueba de este teorema en: Hernández, F., Teoría de Conjuntos, México: Aportaciones Matemáticas No.13, SMM, 1998, p. 65. ↩︎
También puedes consultar la prueba de este teorema en: Gómez L. C, Álgebra Superior Curso Completo. Publicaciones Fomento Editorial, 2014, p. 67. ↩︎
Una de las cosas más impresionantes sobre las matemáticas es que la gente que la practicano están normalmente interesadas en su aplicación,porque las matemáticasen si mismas son una forma de hermoso arte. – Danica McKellar
Introducción
¡Hemos llegado a la última entrada del curso!
Concluiremos esta unidad con la introducción a un importante teorema de la teoría cualitativa de las ecuaciones diferenciales. El teorema de Poincaré – Bendixson.
La demostración a este teorema suele ser compleja y requiere de definiciones y resultados previos, algunos de ellos sobre topología elemental. En este curso sólo enunciaremos este teorema en una versión simplificada de manera que podamos aplicarlo a los sistemas no lineales de dos ecuaciones diferénciales, por esta razón es que este teorema también se conoce como teorema de Poincaré – Bendixson en el plano.
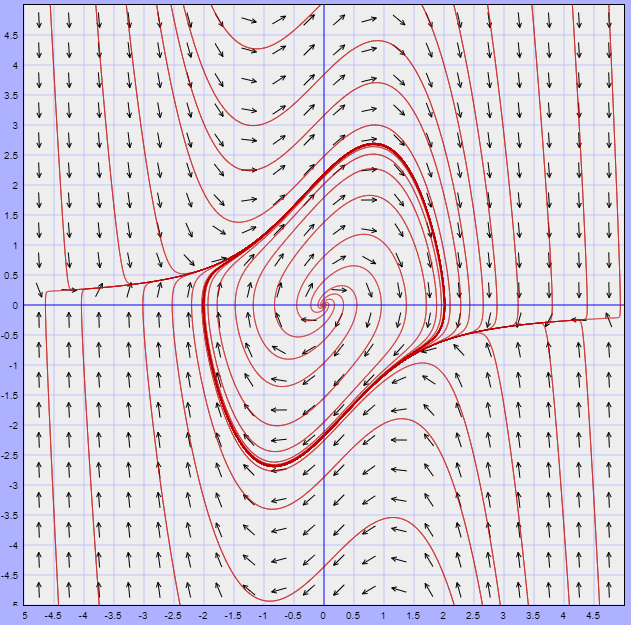
En la entrada sobre linearización visualizamos el plano fase del sistema
Para el caso en el que $\mu = 1$. Dicho plano fase fue el siguiente.
Plano fase del sistema.
El sistema (\ref{1}) en realidad se deduce de la ecuación diferencial de segundo orden
$$\dfrac{d^{2}y}{dt^2} + \mu(y^{2} -1) \dfrac{dy}{dt}+ y = 0 \label{2} \tag{2}$$
la cual lleva por nombre ecuación de Van der Pol y representa el movimiento de un oscilador con amortiguamiento no lineal.
Lo que podemos observar del plano fase es que existe una trayectoria límite (resaltada en rojo) que de alguna manera divide al plano fase en secciones. Si nos concentramos en la trayectoria periódica formada, entonces podemos hablar de la zona interior y la zona exterior a dicha trayectoria y lo que observamos es que por fuera de ella todas las trayectorias tienden a la trayectoria periódica, mientras que dentro de ella todas se alejan del origen para aproximarse, de igual manera, a la trayectoria límite.
Esto es lo que se conoce como un ciclo límite y lo presentan algunos sistemas no lineales. El teorema de Poincaré – Bendixson nos dará las condiciones necesarias para asegurar que un sistema no lineal presenta ciclos límites.
Antes de continuar haremos un breve paréntesis para recordar un par de resultados importantes de las coordenadas polares que nos servirán para hacer más sencillos los cálculos de los ejemplos que realicemos más adelante.
Coordenadas polares
Las coordenadas cartesianas se relacionan con las polares a través de las siguientes relaciones.
\begin{align*} x &= r \cos(\theta) \\ y &= r \sin(\theta) \label{3} \tag{3} \end{align*}
Es sencillo hacer notar que el único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$.
Utilizando las relaciones (\ref{5}) y (\ref{6}) podemos transformar el sistema en coordenadas polares. Comencemos por obtener la ecuación diferencial para $r$, para ello sustituyamos $x^{\prime}$ y $y^{\prime}$ del sistema (\ref{7}) en la ecuación (\ref{5}).
Este sistema esta desacoplado, de manera que podemos resolver cada ecuación por separado para obtener las funciones $r(t)$ y $\theta(t)$ explícitamente.
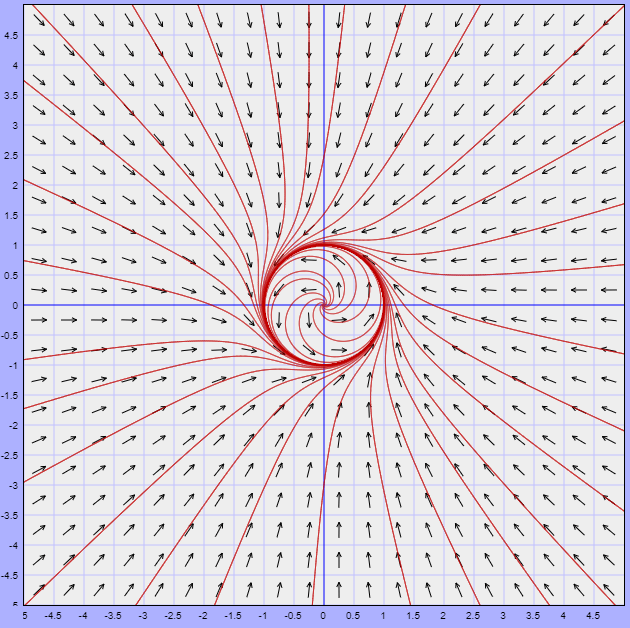
Comencemos con la ecuación de $r^{\prime}$. Dicha ecuación es separable.
Lo que obtenemos es una curva cerrada o ciclo límite correspondiente a una trayectoria periódica para $r = 1$ y todas las demás trayectorias se acercan en espiral desde el exterior y el interior cuando $t \rightarrow \infty$, tal como se muestra en la siguiente figura.
Plano fase del sistema.
Nota: Este plano fase está definido con las trayectorias dadas por (\ref{15}), es decir, corresponde al plano $XY$.
Lo que hemos hecho es probar que el sistema no lineal (\ref{7}) tiene una trayectoria periódica, pero lo hemos hecho resolviendo el sistema explícitamente. Sin embargo, no siempre será sencillo resolver las ecuaciones involucradas, desearíamos de alguna manera saber si un sistema no lineal tiene o no trayectorias periódicas, pero sin conocer las soluciones explícitas. ¡Esto es posible con ayuda del teorema de Poincaré – Bendixson!.
La definición formal de ciclo límite es la siguiente.
Definición: Se dice que una curva cerrada es un ciclo límite de un sistema no lineal (\ref{19}) si existen trayectorias que describen espirales que se acercan o alejan de ella.
Definición: Se dice que un ciclo límite es estable si todas las órbitas de (\ref{19}) que pasan suficientemente cerca de la curva cerrada describen espirales que tienden finalmente hacia ella. En caso contrario, se dice que es inestable.
En el ejemplo visto es claro que se trata de un ciclo límite estable.
En este caso, para que sean claras las siguientes definiciones, detonaremos a una solución del sistema (\ref{19}) como $Y(t; x, y)$ indicando que tanto $x$ como $y$ dependen de la variable $t$.
Definición: Un punto $Y_{0} = (x_{0}, y_{0})$ que pertenece a $\mathbb{R}^{2}$ (plano fase) se dice que es un punto $\omega -$límite (omega límite) de la trayectoria $Y(t; x, y)$ del sistema (\ref{19}) si existe una sucesión $t_{n} \rightarrow \infty$, tal que $$\lim_{n \to \infty} Y(t_{n}; x, y) = Y_{0} \label{20} \tag{20}$$
Definición: Un punto $Y_{0} = (x_{0}, y_{0})$ que pertenece a $\mathbb{R}^{2}$ (plano fase) se dice que es un punto $\alpha -$límite (alfa límite) de la trayectoria $Y(t; x, y)$ del sistema (\ref{19}) si existe una sucesión $t_{n} \rightarrow -\infty$, tal que $$\lim_{n \to \infty} Y(t_{n}; x, y) = Y_{0} \label{21} \tag{21}$$
Definición: El conjunto de todos los puntos $\omega -$límite de una trayectoria $Y(t; x, y)$ se le llama conjunto $\omega -$límite de $Y$ y se denota como $\omega(Y)$.
Definición: El conjunto de todos los puntos $\alpha -$límite de una trayectoria $Y(t; x, y)$ se le llama conjunto $\alpha -$límite de $Y$ y se denota como $\alpha(Y)$.
Definición: El conjunto de todos los puntos limite de $Y(t; x, y)$, $\alpha(Y) \cup \omega(Y)$, es el conjunto límite de $Y(t; x, y)$.
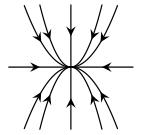
Ejemplo: Un sistema lineal cuyo punto de equilibrio es nodo atractor
Nodo atractor
tiene como punto $\omega -$límite al punto $Y_{0} = (0, 0)$, ya que cualquier trayectoria $Y(t_{n}; x, y)$ tiende a dicho punto para $t_{n} \rightarrow \infty$. Mas aún, el conjunto $\omega -$límite es $\omega(Y) = \{ (0, 0) \}$.
$\square$
Los conjuntos $\alpha -$límite y $\omega -$límite se pueden describir como el lugar geométrico donde nace y muere la trayectoria de la solución de un sistema dinámico dado.
En el primer ejemplo visto anteriormente obtuvimos una trayectoria periódica definida por la circunferencia $x^{2} + y^{2} = 1$, o bien $r = 1$. De acuerdo al plano fase, dicha circunferencia es un conjunto $\omega -$límite tanto para las trayectorias $Y(t; x, y)$ fuera de la circunferencia unitaria $(r > 0)$ como para las trayectorias $Y(t; x, y)$, dentro de la circunferencia unitaria $(r < 1)$.
Definición: Un conjunto $U$ en el plano es positivamente invariante si para todo punto $(x, y) \in U$, $Y(t; x, y) \in U$ para todo $t \geq 0$.
Definición: Un conjunto $U$ en el plano es negativamente invariante si para todo punto $(x, y) \in U$, $Y(t; x, y) \in U$ para todo $t \leq 0$.
Observando nuevamente el plano fase del sistema del ejemplo desarrollado, es posible encontrar un región por fuera de la circunferencia unitaria en la que las trayectorias se comiencen a trazar a partir de $t = 0$. Lo mismo se puede hacer en una región dentro de la circunferencia unitaria, de manera que dicha circunferencia quede completamente contenida en la unión de ambas regiones. Esto lo sabemos de los resultados (\ref{17}) y (\ref{18}).
Conjunto positivamente invariante.
Dicha unión de conjuntos corresponde al conjunto $U \subset \mathbb{R}^{2}$, en este caso, positivamente invariante ya que para todo punto $(x, y) \in U$ las trayectorias $Y(t; x, y) \in U$ para todo $t \geq 0$.
Ahora conocemos los conceptos básicos que nos permitirán comprender el teorema de Poincaré – Bendixson. Cabe mencionar que existen varias formas de enunciar este teorema dependiendo incluso de la profundidad teórica que se este tratando, sin embargo el resultado siempre será el mismo. Lo que haremos en este curso será enunciar el teorema de Poincaré-Bendixson de una forma un poco intuitiva, posteriormente lo enunciaremos nuevamente de forma formal y como corolarios de este teorema enunciaremos dos resultados importantes que incluso se pueden encontrar como enunciados del mismo teorema de Poincaré – Bendixson.
Comenzamos por enunciar el teorema de Poincaré – Bendixson de forma intuitiva.
Teorema: Sean $\varphi_{1}$ y $\varphi_{2}$ dos curvas cerradas en el plano fase del sistema no lineal \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \end{align*} con $\varphi_{2}$ en el interior de $\varphi_{1}$. Entonces si en cada punto de la curva $\varphi_{1}$ el vector está dirigido hacia el interior de $\varphi_{1}$ y en cada punto de la curva $\varphi_{2}$ el vector está dirigido hacia el exterior de $\varphi_{2}$, entonces se puede afirmar que al menos existe un ciclo límite comprendido entre $\varphi_{1}$ y $\varphi_{2}$.
Si recurrimos una vez más a nuestro ejemplo, podemos tomar la curva $\varphi_{1}$ como la frontera exterior del conjunto $U$, mientras que la curva $\varphi_{2}$ como la frontera interior del mismo conjunto.
Curvas que definen al conjunto positivamente invariante.
Lo que observamos es que el campo vectorial sobre los puntos de la curva $\varphi_{1}$ está dirigido hacia el interior de dicha curva, mientras que el campo vectorial sobre los puntos de la curva $\varphi_{2}$ está dirigido hacia el exterior. Es decir, en ambos casos el campo vectorial incide a la región positivamente invariante $U$ y sabemos que efectivamente hay una un ciclo límite comprendido entre ambas trayectorias.
Enunciemos ahora el teorema de Poincaré – Bendixson de manera más formal.
Teorema: Sea $Y(t; x, y)$ una solución del sistema no lineal \begin{align*} x^{\prime} &= F_{1}(x, y) \\ y^{\prime} &= F_{2}(x, y) \end{align*} que permanece en una región acotada del plano que no contiene puntos de equilibrio del sistema. Entonces su trayectoria debe describir una espiral que se aproxima a una curva cerrada simple, la cual a su vez es la trayectoria de una solución periódica del sistema no lineal.
En esta entrada no demostraremos el teorema de Poincaré – Bendixson, sin embargo, en la sección de videos se ha hecho un enorme esfuerzo por desarrollar con detalle la teoría previa para su demostración, así como la demostración del teorema. Se recomienda visitar la entrada.
Antes de realizar algunos ejemplos enunciemos dos resultados importantes que se deducen del teorema de Poincaré – Bendixson.
Corolario: Un conjunto cerrado, acotado y no vacío $U \subset \mathbb{R}^{2}$, que es positivamente invariante (o negativamente invariante) contiene una trayectoria periódica o un punto de equilibrio.
Corolario: Si una solución $Y(t; x, y)$ de un sistema no lineal (\ref{19}) entra a una región cerrada y acotada $U \subset \mathbb{R}^{2}$ y no sale, y además la región no contiene puntos de equilibrio, entonces $Y(t; x, y)$ se aproxima a una trayectoria periódica. En particular, la región contiene una trayectoria periódica.
Concluiremos esta entrada realizando algunos ejemplos en los que apliquemos el teorema de Poincaré – Bendixson, así como ambos corolarios para determinar que los sistemas no lineales estudiados presentan soluciones periódicas.
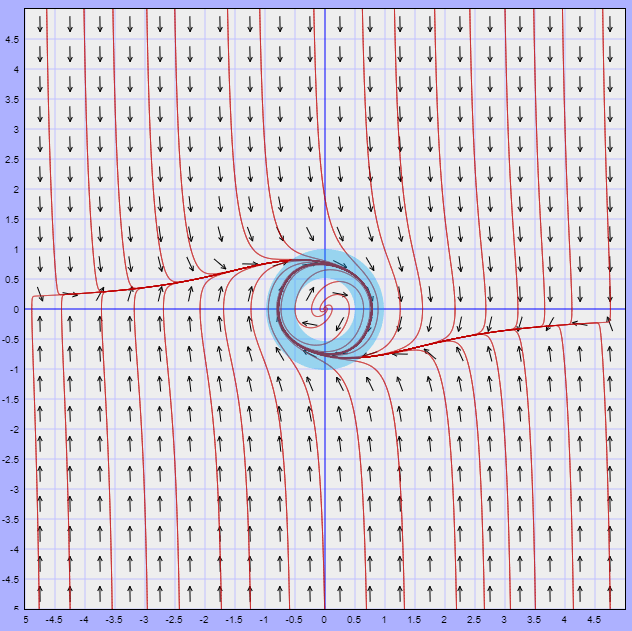
Ejemplo: Demostrar que el siguiente sistema no lineal tiene una trayectoria periódica.
\begin{align*} x^{\prime} &= x -y -\left( x^{2} + \dfrac{3}{2}y^{2} \right)x \\ y^{\prime} &= x + y -\left( x^{2} + \dfrac{1}{2}y^{2} \right)y \end{align*}
Solución: Por su puesto que intentar resolver el sistema para conocer explícitamente a la trayectoria periódica puede ser muy complicado, incluso si conociéramos métodos de resolución. Para poder aplicar el teorema de Poincaré – Bendixson lo que haremos será encontrar una región $U \subset \mathbb{R}^{2}$ que sea positivamente (o negativamente) invariante y que no contenga puntos de equilibrio del sistema.
Como ejercicio moral muestra que el único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$. Esto nos indica que la región $U$ no debe contener al origen.
Nuevamente usemos coordenadas polares con la intención de hallar el intervalo en el que $r$ puede estar comprendido y cuyos valores extremos definan la región $U$ que buscamos.
Sustituyamos $x^{\prime}$ y $y^{\prime}$ del sistema no lineal en la ecuación (\ref{5}).
\begin{align*} r r^{\prime} &= x \left[ x -y -\left( x^{2} + \dfrac{3}{2}y^{2} \right) x \right] + y \left[ x + y -\left( x^{2} + \dfrac{1}{2}y^{2} \right) y \right] \\ &= x^{2} + y^{2} -x^{4} -\dfrac{1}{2}y^{4} -\dfrac{5}{2}x^{2}y^{2} \\ &= (x^{2} + y^{2}) -(x^{4} +2x^{2}y^{2} + y^{4}) + \dfrac{1}{2}y^{4} -\dfrac{1}{2}x^{2}y^{2} \\ &= r^{2} -r^{4} + \dfrac{1}{2}y^{2}(y^{2} -x^{2}) \end{align*}
En el siguiente procedimiento haremos uso de las identidades trigonométricas
Para encontrar la región $U$ que contenga a la trayectoria periódica se debe hacer $r^{\prime} = 0$, debido a que tal región debe ser tangente a la trayectoria periódica en algún punto en el cual $r^{\prime} = 0$, entonces
es un conjunto positivamente invariante. Esto quiere decir que para cualquier punto que se tome en el conjunto $U$, la trayectoria por este punto permanecerá en tal conjunto.
Como el punto de equilibrio $(0, 0)$ no pertenece a $U$, entonces por el teorema de Poincaré – Bendixson se concluye que existe una trayectoria periódica contenida en $U$.
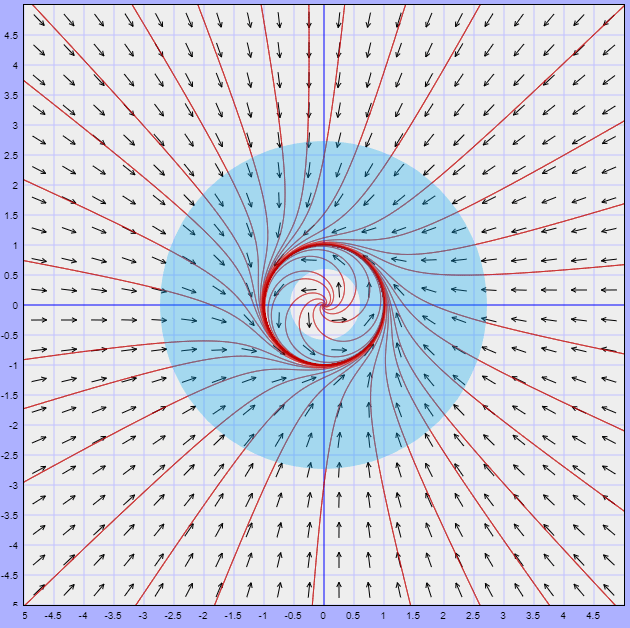
El plano fase del sistema no lineal, indicando la región $U$, se muestra a continuación.
Plano fase del sistema indicando la región positivamente invariante.
En la figura observamos que efectivamente la región $U$ contiene un conjunto límite correspondiente a una trayectoria periódica del sistema no lineal.
$\square$
Realicemos un ejemplo más.
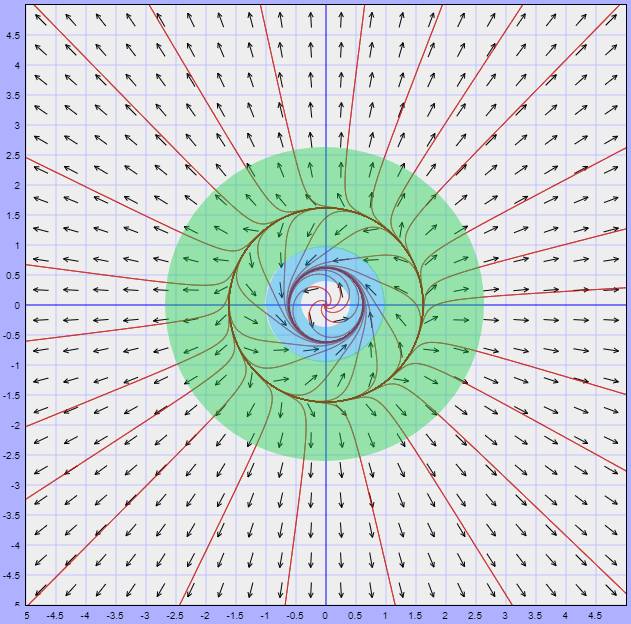
Ejemplo: Mostrar que el siguiente sistema no lineal tiene por lo menos una trayectoria periódica.
Solución: El punto $Y_{0} = (0, 0)$ es el único punto de equilibrio del sistema. Debemos construir una región $U$ en la cual se pueda aplicar el Teorema de Poincaré – Bendixson.
Esta desigualdad nos define la región $U$. Notemos que $r^{\prime} > 0$ para $x^{2} + y^{2} < \dfrac{1}{2}$. En este caso, cualquier trayectoria por el punto
es positivamente invariante. Es decir, para cualquier punto que se tome en el conjunto $U$, la trayectoria por dicho punto permanecerá allí para $t \geq 0$. Como el origen no esta contenido en la región $U$, entonces es posible aplicar el Teorema de Poincaré – Bendixson mostrando así que existe al menos una órbita periódica en dicha región.
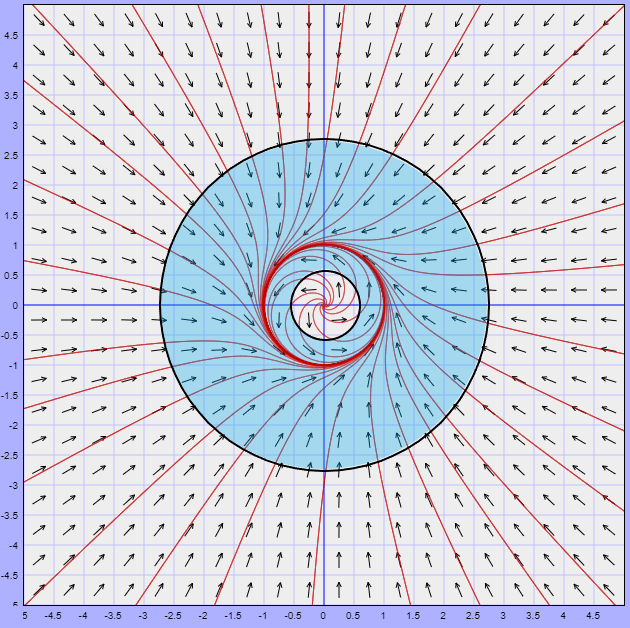
El plano fase del sistema, indicando la región $U$, es el siguiente.
Plano fase del sistema indicando la región positivamente invariante.
Efectivamente existe una trayectoria periódica contenida en la región $U$.
$\square$
Concluyamos con un último ejemplo.
Ejemplo: Mostrar que el siguiente sistema no lineal tiene por lo menos una trayectoria periódica.
Solución: El único punto de equilibrio del sistema es el origen $Y_{0} = (0, 0)$. Determinemos la región $U$ en la que podamos aplicar el teorema de Poincaré – Bendixson.
Sustituyamos las ecuaciones $x^{\prime}$ y $y^{\prime}$ del sistema en la ecuación (\ref{5}).
Este importante resultado nos indica que la región $U$ se puede dividir en dos regiones en las que una de ellas será positivamente invariante y la otra negativamente invariante, dichas regiones son.
Es claro que $U_{1}$ es un conjunto negativamente invariante y $U_{2}$ un conjunto positivamente invariante.
Como ninguna de ambas regiones contiene al punto de equilibrio, entonces podemos aplicar el teorema de Poincaré – Bendixson sobre cada una de las regiones deduciendo que en cada una de ellas existe una trayectoria periódica que corresponden a soluciones periódicas del sistema no lineal.
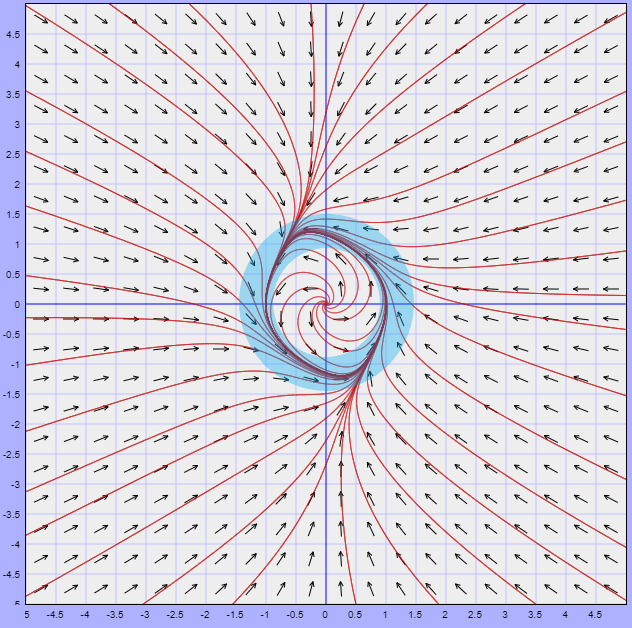
El plano fase del sistema, indicando ambas regiones, es el siguiente.
Plano fase del sistema indicando ambas regiones invariantes.
En este ejemplo mostramos que el sistema no lineal tiene dos trayectorias periódicas como solución.
$\square$
Felicidades, ¡Hemos concluido el curso!
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Mostrar que los siguientes sistemas no lineales tienen por lo menos un trayectoria periódica. Verifica tu resultado visualizando el plano fase del sistema.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
Bienvenidos a la última entrada del curso. En esta ocasión nos enfocaremos en demostrar y analizar el teorema de Poincaré – Bendixson en el plano que dice lo siguiente:
Teorema (Poincaré – Bendixson): Sea $\Omega$ un conjunto límite en un sistema de dos ecuaciones $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$. Si $\Omega$ es no vacío, cerrado y acotado, y tal que no contiene puntos de equilibrio del sistema, entonces es una órbita cerrada (función periódica).
Durante las entradas anteriores revisamos una gran diversidad de ejemplos y vimos que existen sistemas que tienen curvas solución notables que vale la pena estudiar. Tales curvas son (casi siempre) periódicas, y las demás curvas solución del sistema tienden a esta de una manera asintótica. Un par de ejemplos son los siguientes:
Estudiar tales curvas es bastante complicado, y más aún, verificar que son órbitas cerradas. Afortunadamente el teorema de Poincaré – Bendixson nos ayudará a resolver este problema. El teorema es nombrado así debido al matemático francés Henri Poincaré, y al sueco Ivan Otto Bendixson. El primero de ellos fue el que sentó las bases para la teoría cualitativa de las ecuaciones diferenciales.
Demostrar el teorema no es algo sencillo, por lo que iremos enunciando poco a poco las herramientas necesarias para la demostración. Definiremos los conceptos de $\omega$-punto límite, $\alpha$-punto límite, $\omega$-conjunto límite, $\alpha$-conjunto límite, sección local en un punto, caja de flujo para una sección local, el mapeo de primer retorno de Poincaré y enunciaremos sus propiedades básicas, necesarias para la demostración del teorema.
Finalmente demostraremos el teorema de Poincaré – Bendixson en el plano, y comentaremos brevemente las consecuencias de este resultado, uno de los más importantes en la teoría de ecuaciones diferenciales.
Breve introducción al teorema de Poincaré – Bendixson en el plano. Conjuntos límite
Enunciamos brevemente el teorema de Poincaré – Bendixson en el plano. Posteriormente definimos los conceptos de $\omega$-punto límite, $\alpha$-punto límite, $\omega$-conjunto límite y $\alpha$-conjunto límite, revisamos algunos ejemplos y enunciamos las propiedades necesarias para la demostración del teorema.
Secciones locales
Definimos los conceptos de sección local en un punto $\textbf{X}_{0}$ del plano tal que no es punto de equilibrio del sistema $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$. Además definimos una caja de flujos para $\textbf{X}_{0}$ y analizamos el comportamiento de las soluciones al sistema en una vecindad de $\textbf{X}_{0}$.
Mapeo de Poincaré
Definimos el mapeo de primer retorno de Poincaré y lo relacionamos con la sección local de un punto $\textbf{X}_{0}$ que pertenece a una órbita cerrada $\gamma$ del sistema $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$ .
Teorema de Poincaré – Bendixson en el plano
Demostramos el teorema de Poincaré – Bendixson en el plano y enunciamos algunas consecuencias de este teorema.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Determina el $\omega$-conjunto límite de un punto $\textbf{X}_{0}$ perteneciente a una solución periódica.
Prueba que si $\gamma$ es una órbita cerrada para el sistema de ecuaciones $\dot{\textbf{X}}=\textbf{F}(\textbf{X})$ y $S$ es una sección local en cualquier punto, entonces $\gamma$ intersecta a $S$ en a lo más un punto.
Los siguientes ejercicios muestran una estrategia para demostrar la existencia de soluciones periódicas no triviales a un sistema de ecuaciones.
Considera el sistema de ecuaciones $$\begin{array}{rcl} \dot{x} & = & y \\ \dot{y} & = & -x+y(1-2x^{2}-3y^{2}). \end{array}$$
Considera la función $L(x,y)=x^{2}+y^{2}$. Sea $(x(t),y(t))$ una solución no trivial al sistema. Prueba que $\dot{L}(x(t),y(t))>0$ en la región dada por $x^{2}+y^{2}<1/3$ y que $\dot{L}(x(t),y(t))<0$ en la región dada por $x^{2}+y^{2}>1/2$.
Sea $A=\{(x,y) \in \mathbb{R}^{2} | \frac{1}{3}<x^{2}+y^{2}<\frac{1}{2}\}$. Prueba que existe un $\omega$-conjunto límite contenido en $A$.
Prueba que no existen puntos de equilibrio contenidos en $A$.
Concluye que existe una órbita cerrada para el sistema.
Esboza el plano fase del sistema.
Más adelante
Esta es la última entrada del curso de Ecuaciones Diferenciales Ordinarias. Espero hayas disfrutado el curso tanto como nosotros al prepararlo. Por supuesto, existen muchos más temas referentes a las ecuaciones diferenciales que puedes buscar por tu cuenta, una vez que hemos mostrado el camino.
Además, puedes consultar más cursos contenidos en este blog que seguro serán de tu agrado.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»