
Introducción
En anteriores entradas, hemos estudiado sistemas no lineales de ecuaciones de primer orden. Hemos visto la dificultad de conocer el comportamiento completo de las curvas solución en el plano fase, debido a que el campo vectorial asociado al sistema puede ser muy complejo. Afortunadamente logramos conocer el comportamiento de las soluciones cercanas a los puntos de equilibrio, gracias a la linealización del sistema, siempre y cuando los puntos de equilibrio fueran hiperbólicos. También estudiamos el método de las nulclinas para esbozar el plano fase de manera completa, pero como ya mencionamos, este método está sujeto a la complejidad del campo vectorial del sistema.
En esta entrada estudiaremos un tipo de sistema cuyo plano fase es relativamente sencillo de estudiar. Estos sistemas son los llamados sistemas hamiltonianos, que son de la forma $$\begin{array}{rcl} \dot{x} & = & \frac{\partial{H}}{\partial{y}} \\ \dot{y} & = & -\frac{\partial{H}}{\partial{x}} \end{array}$$ para cierta función $H:\mathbb{R}^{2} \rightarrow \mathbb{R}.$
Veremos algunas propiedades importantes que satisfacen tanto el sistema hamiltoniano como la función $H$, que llamaremos función hamiltoniana. La más importante será la que nos afirma que las curvas solución del plano fase serán las curvas de nivel de la función hamiltoniana. Así, para los sistemas hamiltonianos el problema de estudiar cualitativamente las curvas solución en el plano fase será equivalente a conocer las curvas de nivel de la función hamiltoniana.
Por supuesto, veremos las condiciones bajo las cuáles un sistema es hamiltoniano, y en caso de que lo sea, desarrollaremos un método para encontrar la función hamiltoniana que define al sistema.
¡Vamos a comenzar!
Sistemas hamiltonianos
En el primer video definimos a los sistemas hamiltonianos, y vemos las principales propiedades que cumplen dichos sistemas, y la función hamiltoniana que los define. Establecemos la condición que debe satisfacer un sistema de ecuaciones para que este sea hamiltoniano, y en caso de serlo, estudiamos una forma de hallar a la función hamiltoniana.
En el segundo video aplicamos todo el conocimiento adquirido en el primer video para estudiar un par de sistemas hamiltonianos y esbozar su plano fase.
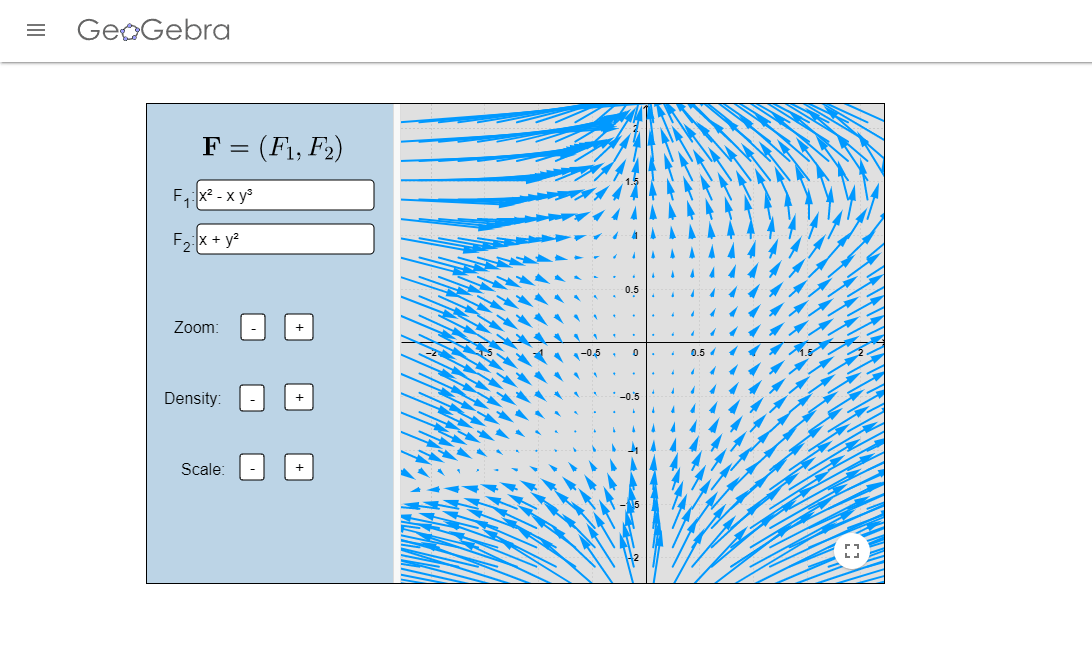
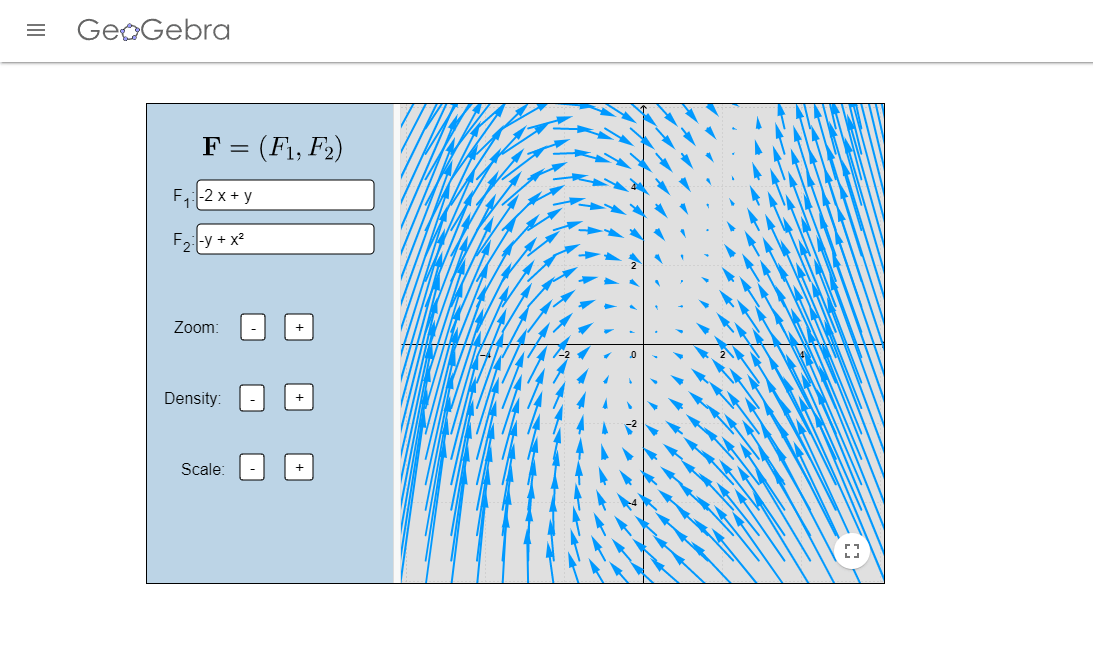
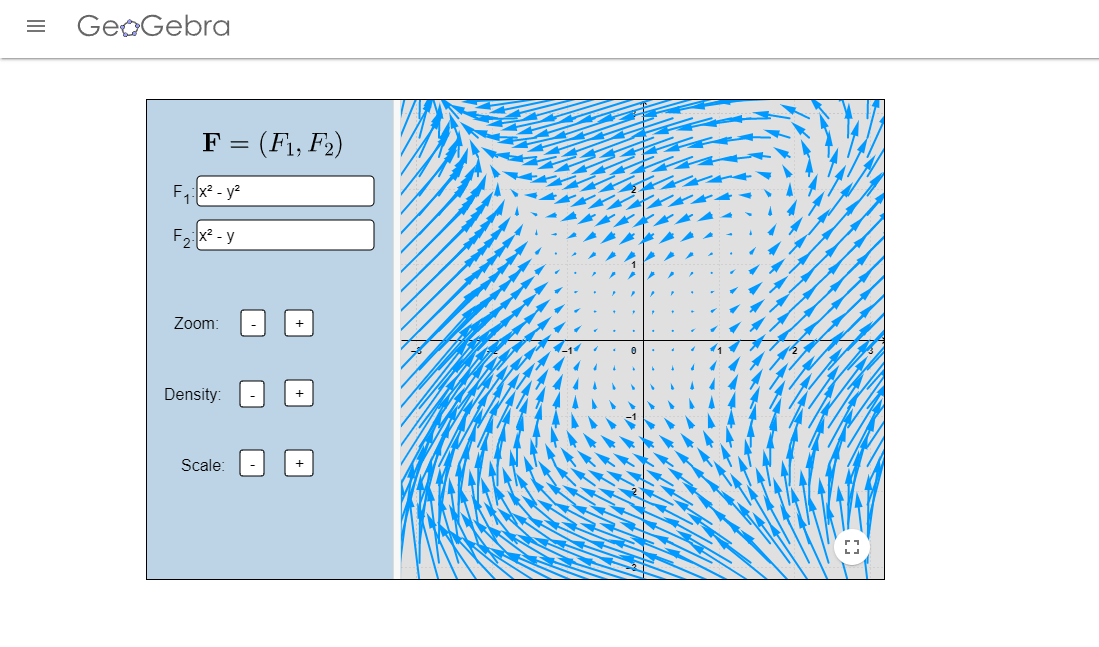
Los campos vectoriales que aparecen en los videos fueron realizados en el siguiente enlace.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
- Verifica si el sistema $$\begin{array}{rcl} \dot{x} & = & x+\sin{y} \\ \dot{y} & = & -y \end{array}$$ es hamiltoniano. En caso de serlo, encuentra una función hamiltoniana y esboza el plano fase del sistema.
- Haz lo mismo que en el ejercicio anterior para el sistema de ecuaciones $$\begin{array}{rcl} \dot{x} & = & -\sin^{2}{x}\sin{y} \\ \dot{y} & = & -2\sin{x}\cos{x}\cos{y}. \end{array}$$
- Demuestra que el sistema $$\begin{array}{rcl} \dot{x} & = & x\cos{xy} \\ \dot{y} & = & -y\cos{xy} \end{array}$$ es hamiltoniano. Encuentra una función hamiltoniana, verifica que es una cantidad conservada para el sistema y esboza el plano fase.
- Considera el sistema lineal de ecuaciones $$\dot{\textbf{X}}=\begin{pmatrix} a & b \\ c & d \end{pmatrix}\textbf{X}.$$ Establece condiciones para las constantes $a,b,c,d$ de tal forma que el sistema sea hamiltoniano.
- Prueba que si un sistema es hamiltoniano, entonces los puntos de equilibrio del sistema linealizado son únicamente puntos silla o centros.
- Considera el sistema de ecuaciones de la forma $$\begin{array}{rcl} \dot{x} & = & F_{1}(y) \\ \dot{y} & = & F_{2}(x). \end{array}$$ Demuestra que este sistema es hamiltoniano y encuentra una función hamiltoniana.
Más adelante
Hemos terminado el análisis de los sistemas hamiltonianos. Lamentablemente, no todos los sistemas lo son, y de hecho, casi ninguno lo es. En la siguiente entrada comenzaremos abordando nuevamente el modelo del péndulo, pero ahora agregaremos fricción, por lo que el sistema dejará de ser hamiltoniano. Estudiaremos los problemas que se presentan, posteriormente definiremos un función similar a la función hamiltoniana, la cual es la llamada función de Lyapunov y veremos algunas propiedades interesantes
Entradas relacionadas
- Ir a Ecuaciones Diferenciales I
- Entrada anterior del curso: Sistemas de ecuaciones no lineales. Las nulclinas y el plano fase
- Siguiente entrada del curso: Funciones de Lyapunov
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
{kind=link}