(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
INTRODUCCIÓN
El primero de los teoremas en esta entrada es uno de los más importantes del curso. Este teorema nos simplifica cálculos, ya que en ocasiones nos permite calcular la dimensión de ciertos subespacios sin necesidad de hacer una descripción explícita de una de sus bases.
El segundo de los teoremas resulta también muy útil ya que nos da otra manera de estudiar si una transformación lineal es o no inyectiva.
Para dibujar un cuadrado solo necesitamos largo y ancho, es decir, está en 2D Para dibujar un cubo necesitamos largo, ancho y alto, es decir, está en 3D
Teorema (2.3.1.): Sean $K$ un campo y $V,W$ $K$ – espacios vectoriales, $T\in\mathcal{L}(V,W)$. Si $V$ es de dimensión finita, entonces se cumple que:
a) $Núc\,T$ es de dimensión finita b) $Im\,T$ es de dimensión finita c) $dim_K Núc\,T+dim_KIm\,T=dim_KV.$
Demostración: Supongamos que $V$ es de dimensión finita, digamos $dim_K\,V=n$.
a) Como $Núc\,T\subseteq V$ y $V$ es de dimensión finita, entonces $Núc\,T$ también es de dimensión finita, digamos que $dim_KNúc\,T=m$.
b) Consideremos $\Delta =\{v_1,v_2,…,v_m\}$ una base de $Núc\,T$. Como es un conjunto linealmente independiente en $V,$ podemos completar $\Delta$ a una base de $V,$ digamos $\beta =\{v_1,v_2,…,v_m,v_{m+1},…,v_n\}$.
Veamos que $\Gamma = \{ T(v_{m+1}),T(v_{m+2}),…,T(v_{n})\}$ es una base de $Im\,T$ con $n-m$ elementos:
P.D. $T(v_{m+1}),T(v_{m+2}),…,T(v_n)$ es una lista l.i.
Sean $\lambda_{m+1},\lambda_{m+2},…,\lambda_n\in K$ tales que $\sum_{i=m+1}^n \lambda_i T(v_i)=\theta_W$.
Como $T$ es lineal $T \left( \sum_{i=m+1}^n \lambda_iv_i \right) =\sum_{i=m+1}^n \lambda_i T(v_i)=\theta_W$. Por lo cual, $\sum_{i=m+1}^n \lambda_iv_i\in Núc\,T$.
Como $\Delta =\{v_1,v_2,…,v_m\}$ es base de $Núc\,T$, existen $\mu_1,\mu_2,…,\mu_m\in K$ tales que $\sum_{i=m+1}^n \lambda_iv_i=\sum_{j=1}^m \mu_jv_j$. De donde $- \sum_{j=1}^m \mu_jv_j + \sum_{i=m+1}^n \lambda_iv_i =\theta_W$.
Tenemos igualada a $\theta_W$ una combinación lineal de elementos de $\beta =\{v_1,v_2,…,v_m,v_{m+1},…,v_n\}$ que es linealmente independiente. Por lo tanto, todos los coeficientes de esta combinación lineal son $0_K$ y en particular llegamos a que $\lambda_{m+1}=\lambda_{m+2}=…=\lambda_n=0_K$.
Concluimos que $T(v_{m+1}),T(v_{m+2}),…,T(v_n)$ es una lista l.i., en consecuencia el conjunto $\{T(v_{m+1}),T(v_{m+2}),…,T(v_n)\}$ es l.i. y tiene $n-m$ elementos.
P.D. $\langle\Gamma\rangle =Im\,T$
Sabemos que $\Gamma\subseteq Im\,T$ y que $Im\,T$ es un espacio vectorial. Por lo tanto, $\langle\Gamma\rangle\subseteq Im\,T$.
Ahora bien, sea $w\in Im\,T$. Por definición de $Im\,T$, existe $v\in V$ tal que $T(v)=w$.
Como $\beta =\{v_1,v_2,…,v_n\}$ es base de $V$, entonces existen $\lambda_1,\lambda_2,…,\lambda_n\in K$ tales que $v=\sum_{i=1}^n \lambda_iv_i$.
Así, obtenemos que $w=T(v)=T\left( \sum_{i=1}^n \lambda_iv_i\right)$. Y como $T$ es lineal, podemos concluir de las igualdades anteriores que $w=\sum_{i=1}^n \lambda_iT(v_i)$.
Tenemos que $\Delta =\{v_1,v_2,…,v_m\}$ es base de $Núc\,T$ y por lo tanto $\Delta\subseteq Núc(T)$. Es decir, $T(v_1)=T(v_2)=…=T(v_m)=\theta_W$.
Obtuvimos a $w$ expresado como una combinación lineal de términos de $\Gamma =\{T(v_{m+1}),T(v_{m+2}),…,T(v_n)\}$. Por lo tanto, $Im\,T\subseteq\Gamma$.
Concluimos que $\Gamma$ es base de $Im\,T$. Como $|\Gamma|=n-m$, entonces $Im\,T$ es de dimensión finita y $dim_KIm\,T=n-m.$
c) Tenemos por el inciso anterior que $dim_KNúc\,T=m$, $dim_KIm\,T=n-m$ y $dim_K\,V=n$. Así, $dim_KV-dim_KNúc\,T=n-m=dim_KIm\,T$, lo que implica que $dim_KV=dim_KNúc\,T+dim_KIm\,T$.
Teorema (2.3.2.): Sean $K$ un campo y $V,W$ $K$-espacios vectoriales y $T\in\mathcal{L}(V,W)$. Entonces $T$ es inyectiva si y sólo si $Núc\,T=\{\theta_V\}.$
Demostración: Veamos ambas implicaciones.
$\Longrightarrow$ Supongamos que $T$ es inyectiva. P.D. $Núc\,T=\{\theta_V\}$.
Dado que $\theta_V\in Núc\,T$ se tiene que $\{\theta_V\}\subseteq Núc\,T$ por lo que basta en realidad verificar la otra contención.
Sea $v\in Núc\,T$. Por definición de núcleo tenemos que $T(v)=\theta_W$. Además, sabemos que $T(\theta_V)=\theta_W$. Así, tenemos que $T(v)=T(\theta_V)$ con $T$ inyectiva. Por lo tanto, $v=\theta_V$.
Llegamos a que el único elemento del núcleo de $T$ es $\theta_V$.
$\Longleftarrow$ Supongamos que $Núc\,T=\{\theta_V\}$. P.D. $T$ es inyectiva.
Sean $u,v\in V$ tales que $T(u)=T(v)$. Entonces $T(u)-T(v)=\theta_W$. Como $T$ es lineal, tenemos que $T(u-v)=T(u)-T(v)$. Así que $T(u-v)=\theta_W$ y por lo tanto, $u-v\in Núc\,T$ donde (por hipótesis) el único elemento que existe es $\theta_V$. Así, $u-v=\theta_V$ y concluimos que $u=v$.
Partiendo de que $T(u)=T(v)$ llegamos a que $u$ debe ser igual a $v$ y por lo tanto, $T$ es inyectiva.
Corolario (2.3.3.): Sean $K$ un campo y $V,W$ $K$-espacios vectoriales, $T\in\mathcal{L}(V,W)$. Si $V,W$ son de dimensión finita y de la misma dimensión, entonces $T$ es inyectiva si y sólo si $T$ es suprayectiva.
Demostración: Supongamos que $V,W$ son $K$-espacios vectoriales de dimensión finita y $dim_KV=dim_KW.$
Tenemos por el teorema anterior que $T$ es inyectiva si y sólo si $Núc\,T=\{\theta_V\}$. Podemos utilizar este resultado porque nuestras nuevas hipótesis no afectan.
Observemos además que $Núc\,T=\{\theta_V\}$ si y sólo si $dim_KNúc\,T=0$ porque el único conjunto que no tiene elementos es el conjunto vacío, que es una base del espacio trivial.
Por el teorema de la dimensión tenemos que $dim_KNúc\,T+dim_hIm\,T=dim_KV$. Así, que $dim_KNúc\,T=0$ si y sólo si $dim_KIm\,T=dim_KV$.
Como tenemos por hipótesis que $dim_KV=dim_KW$, entonces $dim_KIm\,T=dim_KV$ si y sólo si $dim_KIm\,T=dim_KW$.
Recordando que $Im\,T\leqslant W$ se cumple que $dim_KIm\,T=dim_KW$ si y sólo si $Im\,T=W$.
Y dentro de las equivalencias de que $T$ sea suprayectiva está que $Im\,T=W$.
Por la cadena de dobles implicaciones concluimos que, bajo nuestras hipótesis, $T$ es inyectiva si y sólo si $T$ es suprayectiva.
Tarea Moral
Para la transformación lineal $T:\mathbb{R}^3\longrightarrow \mathbb{R}^2$ con $T(a_1,a_2,a_3)=(a_1 + 2a_2, 2a_3 – a_1)$ verifica que se cumple el primer teorema de esta entrada y determina si $T$ es inyectiva o suprayectiva.
Si $T:\mathbb{R}^2\longrightarrow\mathbb{R}^2$ es lineal y sabemos que $T(1,0)=(2,4)$ y $T(1,1)=(8,5)$. ¿Es $T$ inyectiva?
Más adelante…
El último ejercicio de la Tarea Moral en la entrada anterior, 2.1. TRANSFORMACIÓN LINEAL: definición y ejemplos, pregunta la existencia de una transformación lineal de acuerdo a dos valores dados y a continuación veremos cómo podemos plantear y resolver este problema de manera más general.
En la entrada anterior empezamos a hablar del teorema de la función inversa. Dimos su enunciado y probamos varias herramientas que nos ayudarán ahora con su demostración.
Recordemos que lo que queremos demostrar es lo siguiente.
Teorema (de la función inversa). Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ de clase $C^{1}$ en el abierto $S$. Si $Df(\bar{a})$ es invertible, entonces, existe $\delta >0$ tal que:
$B_{\delta}(\bar{a})\subseteq S$ y $f$ es inyectiva en $B_{\delta}(\bar{a})$.
$f^{-1}:f(B_{\delta}(\bar{a}))\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ es continua en $f(B_{\delta}(\bar{a}))$.
$f(B_{\delta}(\bar{a}))\subseteq \mathbb{R}^{n}$ es un conjunto abierto.
$f^{-1}$ es de clase $C^{1}$ en $f(B_{\delta}(\bar{a}))$ y además, si $\bar{x}=f(\bar{v})\in f(B_{\delta}(\bar{a}))$, entonces, $Df^{-1}(\bar{x})=Df^{-1}(f(\bar{v}))=(Df(\bar{v}))^{-1}$.
La herramienta más importante que probamos en la entrada anterior nos dice que si una función $f:S\subseteq \mathbb{R}^n\to \mathbb{R}^n$ es de clase $C^1$, $\bar{a}\in S$ y $DF(\bar{a})$ es invertible, entonces existe una $\delta>0$ tal que $B_\delta(\bar{a})\subseteq S$ y $Df(\bar{b})$ es invertible para todo $\bar{b}\in B_\delta(\bar{a})$. Veremos cómo esta herramienta y otras que desarrollaremos en el transcurso de esta entrada nos permiten demostrar el teorema.
La función $f$ es inyectiva en una vecindad de $\bar{a}$
Vamos a enfocarnos en el punto $(1)$ del teorema. Veremos que existe la $\delta$ que hace que la función restringida a la bola de radio $\delta$ centrada en $\bar{a}$ es inyectiva. En esta parte de la prueba es conveniente que recuerdes que la norma infinito de un vector $(x_1,\ldots,x_n)\in \mathbb{R}^n$ es $$||\bar{x}||_{\infty}:=máx\{ |x_{1}|,\dots ,|x_{n}|\}.$$
Además, cumple para todo $\bar{x}\in \mathbb{R}^{n}$ que $$||\bar{x}||\leq \sqrt{n} ||\bar{x}||_{\infty}.$$
Veamos que bajo las hipótesis del problema se puede acotar $||f(\bar{u})-f(\bar{v})||$ en términos de $||\bar{u}-\bar{v}||$ dentro de cierta bola.
Proposición. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ de clase $C^{1}$ en el conjunto abierto $S$, y $\bar{a}\in S$. Si $Df(\bar{a})$ es invertible, entonces existe $\delta >0$ y $\varepsilon>0$ tal que $B_{\delta}(\bar{a})\subseteq S$ y $||f(\bar{u})-f(\bar{v})||\geq \varepsilon||\bar{u}-\bar{v}||$ para cualesquiera $\bar{u},\bar{v}\in B_{\delta}(\bar{a})$.
Demostración. Por la diferenciabilidad de $f$ en $\bar{a}$, tenemos
para cada $\bar{a}\in S$ y cada $\bar{x}\in \mathbb{R}^{n}$.
Como $Df(\bar{a})$ es invertible, por los resultados de la entrada anterior existe un $m>0$ tal que
\[ ||Df(\bar{a})(\bar{x})||\geq m||\bar{x}|| \]
para todo $\bar{x}\in \mathbb{R}^{n}$.
También por resultados de la entrada anterior, para $\epsilon:=\frac{m}{2\sqrt{n}}>0$ existe $\delta >0$ tal que si $\bar{b}\in B_{\delta}(\bar{a})\subseteq S$ entonces
Usaremos en un momento estas desigualdades, pero por ahora fijemos nuestra atención en lo siguiente. Dados $\bar{u},\bar{v}\in B_{\delta}(\bar{a})$, tomemos el $k\in \{1,\dots ,n\}$ tal que $$||Df(\bar{a})(\bar{u}-\bar{v})||_{\infty}=|\triangledown f_{k}(\bar{a})\cdot (\bar{u}-\bar{v})|.$$
¿Cómo podemos seguir con nuestras desigualdades? Necesitamos usar el teorema del valor medio. Bastará el que demostramos para campos escalares. Aplicándolo a $f_k$ en los puntos $\bar{u},\bar{v}$ cuyo segmento se queda en la bola convexa $B_\delta(\bar{a})$, podemos concluir que existe un vector $\bar{w}$ en el segmento $\bar{\bar{u}\bar{v}}$ que cumple
Sabemos que para cualquier vector el valor absoluto de cualquiera de sus coordenadas es en valor menor o igual que la norma del vector. Además, demostramos inicialmente unas desigualdades anteriores. Juntando esto, obtenemos la siguiente cadena de desigualdades:
La gran conclusión de esta cadena de desigualdades es que $$||f(\bar{u})-f(\bar{v})||\geq \varepsilon||\bar{u}-\bar{v}||,$$ que es lo que buscábamos.
$\square$
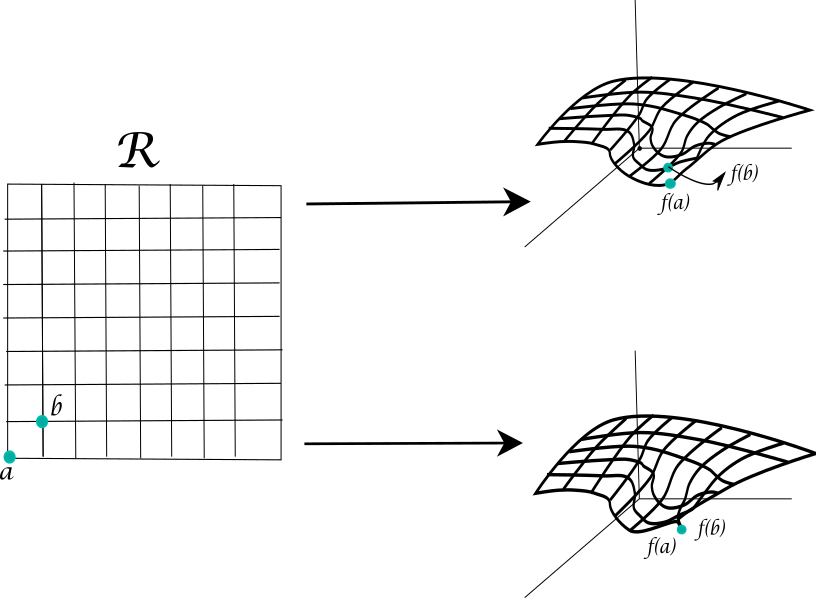
¡Esto es justo lo que nos pide el primer punto! Hemos encontrado una bola alrededor de $\bar{a}$ dentro de la cual si $\bar{u}\neq \bar{v}$, entonces $||f(\bar{u})-f(\bar{v})||\geq \varepsilon ||\bar{u}-\bar{v}||>0$, de modo que $f(\bar{u})\neq f(\bar{v})$. ¡La función restringida en esta bola es invertible! En términos geométricos el último teorema nos dice lo siguiente: Si $f$ es diferenciable en un abierto $S$, y $Df(\bar{a})$ es invertible, entonces hay una vecindad alrededor de $\bar{a}$ en donde $f$ «no se pega», es decir $f$ es inyectiva.
Figura 1: Si la función no es inyectiva, lo que tenemos es que proyecta el rectángulo $\mathcal{R}$ en una superficie que pega los puntos $\bar{a}$ y $\bar{b}$. Arriba una función inyectiva y abajo una que no lo es.
Ya vimos cómo encontrar una bola $B_\delta(\bar{a})$ dentro de la cual $f$ es inyectiva. Si pensamos que el contradominio es exactamente $f(B_\delta(\bar{a}))$, entonces la función también es suprayectiva. Esto hace que sea biyectiva y por tanto que tenga inversa $f^{-1}$.
La función inversa es continua
Veamos ahora que la función inversa es continua. De hecho, mostraremos algo un poco más fuerte.
Teorema. Sea $f:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ de clase $C^{1}$ en el abierto $S$, y $\bar{a}\in S$. Si $Df(\bar{a})$ es invertible, entonces existe $\delta >0$ tal que $B_{\delta}(\bar{a})\subseteq S$, $f$ es inyectiva en $B_{\delta}(\bar{a})$ y además $f^{-1}:f(B_{\delta}(\bar{a}))\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ es uniformemente continua en su dominio.
Demostración. La primera parte y la existencia de $f^{-1}:f(B_\delta(a))\subseteq \mathbb{R}^n \to \mathbb{R}^n$ se debe a la discusión de la sección anterior. De hecho, lo que mostramos es que existe $\delta >0$ y $\varepsilon>0$ tal que $||f(\bar{v})-f(\bar{u})||\geq \varepsilon||\bar{v}-\bar{u}||$ para todo $\bar{u},\bar{v}\in B_{\delta}(\bar{a})$.
Supongamos que nos dan un $\varepsilon^\ast$. Tomemos $\delta^\ast=\varepsilon^\ast \varepsilon$. Tomemos $\bar{x},\bar{y}$ en $f(B_\delta(\bar{a}))$ tales que $||\bar{y}-\bar{x}||<\delta ^{\ast}$. Como $\bar{x}$ y $\bar{y}$ están en dicha bola, podemos escribirlos como $\bar{x}=f(\bar{u})$, $\bar{y}=f(\bar{v})$ con $\bar{u},\bar{v}\in B_{\delta}(\bar{a})$. Notemos entonces que
Tenemos entonces que $f^{-1}$ es uniformemente continua en $f(B_\delta(\bar{a}))$.
$\square$
Esto demuestra el punto $(2)$ de nuestro teorema. La prueba de que el conjunto $f(B_\delta(\bar{a}))$ es abierto no es para nada sencilla como parecería ser. Una demostración muy instructiva, al nivel de este curso, se puede encontrar en el libro Cálculo diferencial de varias variables del Dr. Javier Páez Cárdenas editado por la Facultad de Ciencias de la Universidad Nacional Autónoma de México (UNAM) en las páginas 474-476.
La función inversa es diferenciable
Resta hacer la demostración de $(4)$. En esta sección veremos que la inversa $f^{-1}$ es derivable y que la derivada es precisamente lo que propone el teorema. En la siguiente sección veremos que la inversa es $C^1$.
Tomemos un punto $\bar{x}_0=f(\bar{v}_0)\in f(B_{\delta}(\bar{a}))$. Mostraremos que, en efecto, $T=(Df(\bar{v}_0))^{-1}$ es la derivada de $f^{-1}$ en $\bar{x}_0$, lo cual haremos por definición verificando que
Esta función está bien definida, pues $f$ es inyectiva en la bola $B_{\delta}(\bar{a})$. La composición $g\circ f^{-1}$ también está bien definida en el abierto $f(B_{\delta}(\bar{a}))$ y
El factor que nos falta entender es $\frac{||\bar{v}-\bar{v}_{0}||}{||f(\bar{v})-f(\bar{v}_{0})||}$. Pero por la primera proposición de esta entrada, sabemos que existe una $\epsilon>0$ que acota este factor superiormente por $\frac{1}{\epsilon}$. De esta manera,
Resta verificar que $f^{-1}$ es de clase $C^{1}$ en $f(B_{\delta}(\bar{a}))$. Lo haremos con la caracterización de la entrada anterior. Tomemos una $\mu>0$. Nos gustaría ver que si $\bar{x}$ y $\bar{x}_0$ están suficientemente cerca, entonces
Tomando $X=Df(\bar{v})$ y $Y=Df(\bar{v}_0)$, aplicando la igualdad anterior en un punto $\bar{x}$ en $\mathbb{R}^n$, sacando normas y usando la desigualdad \eqref{eq:clasec1}, obtenemos:
Como $f$ es de clase $C^1$, por la entrada anterior podemos construir una $\delta^\ast$ tal que $B_{\delta^\ast}(\bar{v}_0)\subseteq B_\delta(\bar{a})$ y para la cual si $\bar{v}$ está en $B_{\delta^\ast}(\bar{v}_0)$, entonces:
Finalmente, como $f^{-1}$ es continua en $f(B_{\delta}(\bar{a}))$, si $\bar{x}$ y $\bar{x}_0$ están suficientemente cerca, digamos $||\bar{x}-\bar{x}_0||<\nu$, entonces
Esto implica que $f^{-1}$ es de clase $C^1$. Como tarea moral, revisa los detalles y di explícitamente qué resultado de la entrada anterior estamos usando.
$\square$
Ejemplo del teorema de la función inversa
Ejemplo. Consideremos $\xi :\mathbb{R}^{3}\rightarrow \mathbb{R}^{3}$ dada por $\xi (r,\theta, \phi)=(r\hspace{0.15cm}sen \phi \hspace{0.15cm}cos\theta ,r\hspace{0.15cm} sen \phi \hspace{0.15cm}sen\theta ,r\hspace{0.15cm}cos \phi)$. Se tiene que $\xi$ es diferenciable en todo su dominio pues cada una de sus derivadas parciales es continua. Esta es la función de cambio de coordenadas de esféricas a rectangulares o cartesianas. La matriz jacobiana está dada como sigue.
Luego $\det(D\xi (r,\theta ,\phi ))=-r^{2}\hspace{0.1cm}sen\phi$ entonces $D\xi$ es invertible cuando $r\neq 0$ y $\phi \neq k\pi$, $k\in \mathbb{Z}$. Su inversa es:
El teorema de la función inversa nos garantiza la existencia local de una función $\xi ^{-1}$. En este caso, sería la función de cambio de coordenadas rectangulares a esféricas. Si $f:S\subseteq \mathbb{R}^{3}\rightarrow \mathbb{R}$ es una función $C^{1}$ dada en coordenadas esféricas; podemos asumir que $f\circ \xi ^{-1}$ es la misma función pero en términos de coordenadas rectangulares.
$\triangle$
Más adelante…
¡Lo logramos! Hemos demostrado el teorema de la función inversa, uno de los resultados cruciales de nuestro curso. El siguiente tema es el teorema de la función implícita, que será otro de nuestros resultados principales. Uno podría pensar que nuevamente tendremos que hacer una demostración larga y detallada. Pero afortunadamente la demostración del teorema de la función implícita se apoya fuertemente en el teorema de la función inversa que ya demostramos. En la siguiente entrada enunciaremos y demostraremos nuestro nuevo resultado y una entrada más adelante veremos varios ejemplos para profundizar en su entendimiento.
Tarea moral
En el ejemplo que dimos, verifica que el determinante en efecto es $-r^2\sin\phi$. Verifica también que la inversa es la matriz dada.
Repasa cada una de las demostraciones de esta entrada y asegúrate de entender por qué se siguen cada una de las desigualdades. Explica en qué momentos estamos usando resultados de la entrada anterior.
Da la función inversa de la transformación de cambio de coordenadas polares a rectangulares $g(r,\theta)=(r\hspace{0.1cm}cos\theta , r\hspace{0.1cm}sen\theta )$.
Demuestra que para todo $\bar{x}\in \mathbb{R}^{n}$ se tiene $||\bar{x}||\leq \sqrt{n}||\bar{x}||_{\infty}.$
Verifica que en efecto $||\cdot||_{\infty}$ es una norma.
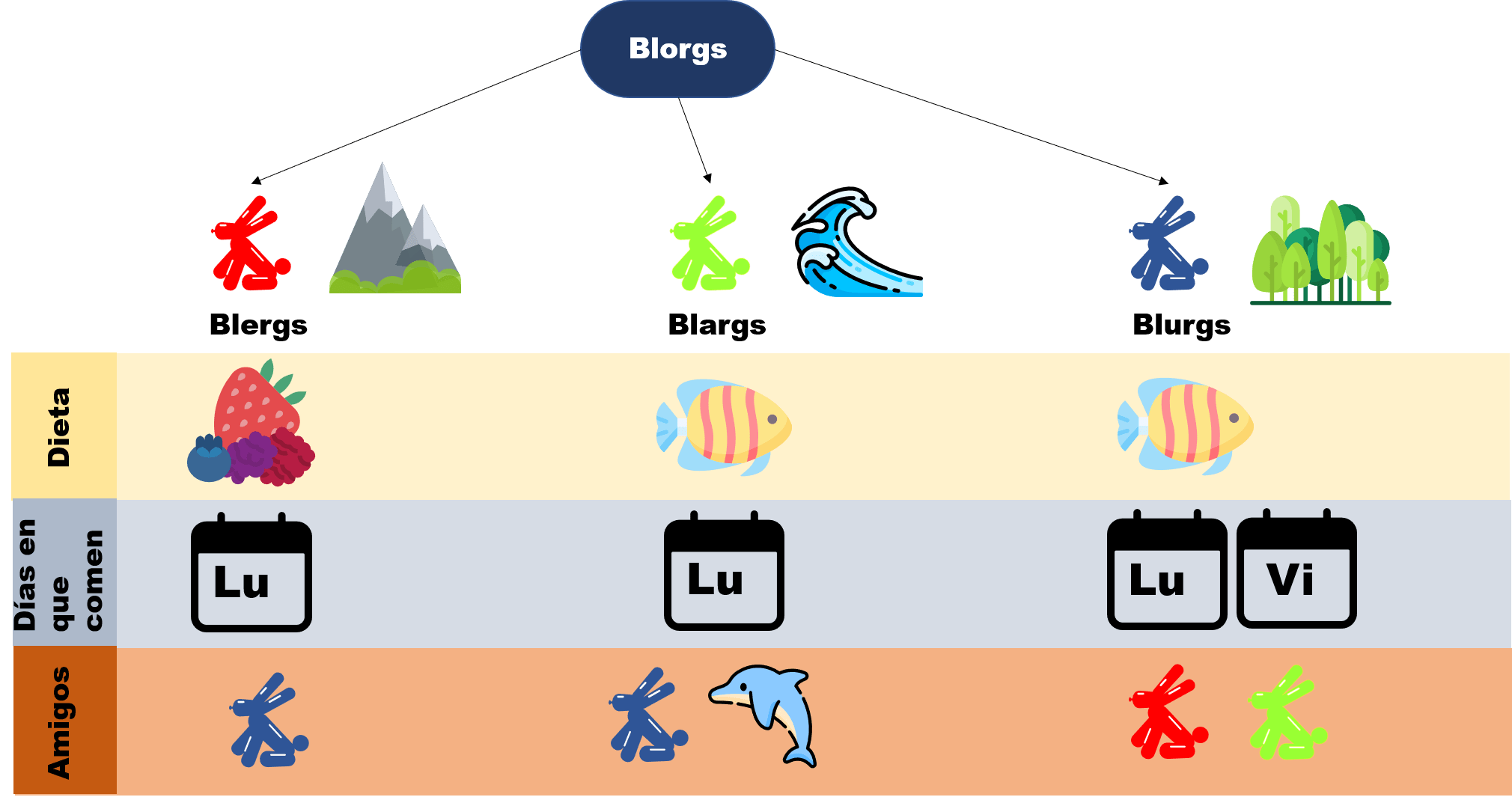
Esta entrada es parte de una serie de notas introductorias sobre técnicas de demostración. En esta entrada se habla sobre demostraciones directas e indirectas. Cada entrada está ligeramente relacionada con las otras. Para entenderlas bien, usamos el siguiente diagrama que recopila cómo se comporta un mundo fantástico llamado Axios, en donde habitan creaturas llamadas Blorgs. Para leer más sobre ello, haz click aquí.
Hasta ahora hemos introducido algunos conceptos introductorios de lo que es una demostración matemática, pero apenas estamos por iniciar este recorrido hacia lo que son estas. Ahora, empezaremos por ver dos formas de pensar al demostrar que son las demostraciones directas e indirectas.
Demostraciones directas
Ahora vamos a explorar un poco más esto de las demostraciones, qué son y cómo nos ayudan. ¿Recuerdas nuestro ejemplo de que todos los Blorgs verdes comían peces? Este es un ejemplo de lo que llamamos demostraciones directas. Este nombre viene del hecho de que partimos de una lista de proposiciones válidas y vamos obteniendo más proposiciones válidas a través de reglas de inferencia básicas hasta que tenemos la conclusión deseada. En general este tipo de demostraciones van a ser cadenas de implicaciones. Por ejemplo partiendo de
concluiremos que $P_0 \Rightarrow P_{n}$. Esto en términos sencillos quiere decir: las demostraciones directas van a ser aquellas que podemos dar «el paso claro». Retomando nuestra analogía con las piezas Leog, si sabemos que con madera podemos construir las patas y el asiento, y con patas y el asiento podemos construir una silla, entonces ya sabríamos que con madera podemos construir una silla, pues decimos: «Primero con la madera construimos las patas y el asiento, y después con las patas y el asiento construimos la silla». Cuando veamos otros tipos de demostraciones, verás más fácilmente porqué tienen este nombre. Mientras tanto veamos otro ejemplo.
Proposición. Si un Blorg vive en las montañas, entonces come los lunes.
Demostración. Recordemos cómo empezamos la demostración de la entrada pasada, empezamos con un Blorg que vive en las montañas y veremos poco a poco que come los lunes. Para empezar, nota que con las siguientes proposiciones:
$P(x) = x \text{ vive en las montañas} $
$Q(x) = x \text{ es un Blerg},$
tenemos como axioma (y por lo tanto como cierto) que
$$P(x) \Rightarrow Q(x).$$
Además, sabemos que todos los Blergs comen los lunes, es decir, suponiendo que $R(x) = x \text{ come los lunes}$ entonces es cierto que
$$Q(x) \Rightarrow R(x).$$
Y la siguiente regla de inferencia es válida:
\begin{array}{rl} & P \Rightarrow Q \\ & Q \Rightarrow R \\ \hline \therefore & P \Rightarrow R. \end{array}
Entonces podemos aplicar esta regla de inferencia a nuestro problema, dando como resultado que
$$P(x) \Rightarrow R(x).$$
Ahora recuerda que en las demostraciones nuestro objetivo va a ser «generalizar». No basta con que un Blorg en las montañas coma los lunes, si no quisieramos que siempre que veamos a un Blorg en las montañas, sepamos que come los lunes.
Para esto, empezaremos con un Blorg a quien le llamaremos $x$ y lo único que sabemos de este Blorg es que vive en las montañas, es decir $P(x)$. Ahora, aplicando las reglas de inferencia, sabemos que si $P(x)$ entonces también $R(x)$. Esto quiere decir que sabiendo que un Blorg vive en las montañas, ya sabemos que también come los lunes. Recuerda que para hacer este paso aplicamos las reglas de inferencia. De esta manera, $x$ come los lunes.
Por lo tanto, los Blorgs que viven en las montañas comen los lunes.
$\square$
Demostraciones indirectas
Otra estrategia para demostrar cosas va a ser mediante lo que se conoce como demostraciones indirectas. Esta forma de demostrar proposiciones va a usar la siguiente regla de inferencia:
¿Recuerdas que la premisa es equivalente a la conclusión? Pues el que sea equivalente es suficiente para que sea una regla de inferencia válida. Puedes verificarlo haciendo la tabla de verdad.
¿Por qué usaremos esta regla de inferencia? Porque a veces queremos mostrar $P\Rightarrow Q$, pero es mucho más «tangible» mostrar la contrapositiva $\neg Q\Rightarrow \neg P$ pues a veces $\neg Q$ nos da más sustancia matemática con la cual trabajar. Por ejemplo, quizás $Q$ tiene un cuantificador universal, y al negarlo se convierte en un cuantificador existencial, que nos permite tomar a un objeto matemático que no tenga cierta propiedad y de ahí mostrar $P$.
Veamos un ejemplo en donde puede aplicarse una demostración indirecta.
Proposición. Si un Blorg come peces, entonces tiene dos tipos de amigos.
Demostración. Aquí podríamos intentar proceder directamente. Tomar un Blorg que coma peces. Pero esto nos lleva a un pequeño problema: al hacer esto la demostración se divide en dos casos: que el Blorg sea Blarg, o que sea Blurg. Podríamos hacer cada caso, y platicaremos de eso más adelante. Pero pensemos en por qué una demostración indirecta nos ayudaría a argumentar más fácilmente. Tomemos las siguientes proposiciones:
$P(x) = x \text{ es come peces}$
$Q(x) = x \text{ tiene dos tipos de amigos}.$
Queremos mostrar que $P(x)\Rightarrow Q(x)$. Pero lo que nos dice la regla de inferencia de arriba es que esto es lo mismo que demostrar que $\neg Q \Rightarrow \neg P$. Ahora notemos que
$\neg Q(x) = x \text{ no tiene dos tipos de amigos} = x \text{ tiene un tipo de amigos}$ $\neg P(x) = x \text{ no come peces} = x\text{ come frutos rojos}.$
Podemos argumentar entonces como sigue. Tomemos $x$ un Blorg que tiene un tipo de amigos. Por ello, $x$ es un Blerg. Además sabemos que «si $x$ es Blerg, entonces come frutos rojos». Por lo tanto, $x$ come frutos rojos.
Hemos mostrado entonces la contrapositiva «Si $x$ tiene un tipo de amigos, entonces $x$ come frutos rojos». Por la equivalencia entre una implicación y su contrapositiva, hemos demostrado que «Si $x$ come peces, entonces tiene dos tipos de amigos.»
$\square$
Algunas notas sobre las demostraciones anteriores
Vamos a hacer algunas observaciones sobre la forma en que demostramos nuestras proposiciones.
En la primera demostración usamos nuevamente una cadena de implicaciones, como en la entrada anterior. Observa que aunque estamos demostrando cosas distintas, en el fondo estamos usando exactamente el mismo tipo de inferencias matemáticas.
En la segunda demostración podíamos, alternativamente, intentar proceder directamente. Si un Blorg come peces, entonces puede ser Blarg o Blurg. Pero este «o» nos lleva a dos posibilidades. Tenemos que cubrir ambas posibilidades mediante una demostración por casos, de la cual hablaremos más adelante. La manera indirecta de proceder nos permitió evitar los casos.
Más adelante…
Hasta ahora tenemos dos formas de demostrar: demostraciones directas e indirectas. En pocas palabras las directas usan sucesiones de proposiciones que ya sabemos para llegar a una conclusión, mientras que las indirectas no empiezan por lo que quiere demostrar, sino que muestran que si la conclusión no es cierta, entonces la premisa no lo es.
Continuando con nuestras estrategias, la siguiente consistirá en hacer demostraciones por contradicción. En pocas palabras para demostrar que una proposición es verdadera, supondremos que no lo es. Y en una serie de pasos lógicos, veremos que habrá proposiciones que son falsas y verdaderas a la vez (esto no puede pasar), llamándose esto una contradicción.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra directamente que los blorgs rojos comen frutas.
Demuestra directamente que los blorgs rojos comen frutas los lunes.
Demuestra indirectamente que si un blorg no come peces, entonces es un blerg.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
En esta entrada resolveremos problemas de temas vistos en entradas anteriores. Haremos algunos ejemplos relacionados con los conectores condicionales que vimos en una entrada anterior: la implicación y la doble implicación. También veremos algunos de cuantificadores lógicos.
Problemas resueltos
Problema. Si $P$ y$R$ son verdaderas y $Q$ es falsa, di si la siguiente proposición es verdadera o falsa: $$(P \lor R) \Rightarrow \neg(Q \land R).$$
Solución. Haremos una tabla de verdad pero únicamente con los valores que nos dan, es decir, no vamos a hacer la tabla para todos los casos, sino únicamente los que nos interesan en este momento:
$P$
$Q$
$R$
$P \lor R$
$Q \land R$
$\neg (Q \land R)$
$(P \lor R) \Rightarrow \neg(Q \land R)$
$1$
$0$
$1$
$1$
$0$
$1$
$1$
Por lo tanto la proposición es verdadera para los valores de verdad dados.
$\square$
Problema. Di si las siguientes proposiciones sobre los números enteros son verdaderas o no:
Vamos a hacer algunas verificaciones sobre cada una de las proposiciones para encontrar su valor de verdad:
$(3+1=4) \Rightarrow (0<10)$
Como $3+1=4$ es verdadera y $0<10$ es verdadera también, entonces la proposición es verdadera.
$(4=5) \Leftrightarrow (9+1=10)$
Recordemos que la doble condicional es verdadera si ambas proposiciones tienen el mismo valor de verdad. Por un lado no es cierto que $4=5$ mientras que sí es verdad que $9+1=10$. Por lo tanto la proposición es falsa.
$((6<7) \lor (3^2=10)) \Rightarrow (12<12^2)$
Vamos a ver la proposición por partes. Primero veamos que $((6<7) \lor (3^2=10))$ es una disyunción verdadera pues una de las proposiciones que la componen, $6<7$, lo es. Como $12<12^2$ es verdad, entonces la implicación tiene antecedente y subsecuente verdaderos y por lo tanto es verdadera.
De nuevo vamos a dividir la proposición en sus partes, $(-1<1) \land (1<-1)$ y $(13-1=12-1+1)\Rightarrow (1+1<2)$. Primero notemos que $(-1<1) \land (1<-1)$ es falsa, pues no es cierto que $1<-1$.
Ahora, veamos cómo es $(13-1=12-1+1)\Rightarrow (1+1<2)$. Nota que $12=13-1$ y $12=12-1+1$, entonces $13-1=12-1+1$. Entonces esta primera parte es verdad, mientras que $1+1=2$ pero no es cierto que $2<2$. Así que es falso que $1+1<2$. Entonces $(13-1=12-1+1)\Rightarrow (1+1<2)$ es falso.
Como $(-1<1) \land (1<-1)$, $(13-1=12-1+1)\Rightarrow (1+1<2)$ son ambas falsas, entonces $((-1<1) \land (1<-1)) \Leftrightarrow ((13-1=12-1+1)\Rightarrow (1+1<2))$ es verdadero.
$\square$
Nota: En este tipo de ejercicios, ¿viste cómo se dieron las argumentaciones de las proposiciones en cada caso? El secreto aquí fue «desarmar» las proposiciones en partes más pequeñas. Esto lo hacemos pues recuerda que los conectores son binarios, esto significa que su valor de verdad depende del valor de verdad de las dos proposiciones que conectan.
Así, para ver cuál es el valor de verdad de $((6<7) \lor (3^2=10)) \Rightarrow (12<12^2)$, lo que hicimos fue deshacerlo en sus partes. Una parte $A$ fue $(6<7) \lor (3^2=10)$ y la otra parte $B$ fue $12<12^2$. Entonces bastaba con verificar cuáles eran los valores de verdad de $A$ y $B$. Para ello, volvimos a «desarmar» a $A$ en sus partes «atómicas». Es decir, desarmamos $(6<7) \lor (3^2=10)$ en $6<7$ y $3^2=10$ y estudiamos el valor de verdad de cada uno de ellos. Usualmente este tipo de pensamiento de «desarmar un problema en sus partes» te ayudará a verificar o demostrar cosas más adelante.
Problema. Sean $P(x)$, $Q(x)$ y $R(x)$ los siguientes predicados:
$P(x): x \leq 4$
$Q(x): x +1$ es par.
$R(x): x> 0$
Si nuestro universo de discurso son los números enteros, ¿cuáles son los valores de verdad de las siguientes proposiciones?
$P(1)$
$P(1) \Rightarrow Q(1)$
$P(0) \Rightarrow (R(5) \Rightarrow Q(0))$
$R(-1) \lor P(2)$
$\neg R(-2) \land P(-2)$
Solución.
1.$P(1)$
Es verdadera, pues $1 \leq 4$.
2. $P(1) \Rightarrow Q(1)$
Como $P(1)$ es verdadera y además $1+1=2$ es par, entonces la proposición es verdadera.
3. $P(0) \Rightarrow (R(5) \Rightarrow Q(0))$
Vamos a dividir la proposición en partes. Primero notemos que $P(0)$ es verdad. Mientras que $R(5) \Rightarrow Q(0)$ es falsa, ya que es cierto que $5>0$ pero es falso que $0+1$ sea par. Entonces la proposición es falsa.
4. $R(-1) \lor P(2)$
Como $R(-1)$ es falsa pero $P(2)$ es verdad, entonces la proposición es verdadera.
5. $\neg R(-2) \land P(-2)$
Como $-2>0$ es falsa, entonces $\neg R(-2)$ es verdad. Además, $-2<4$ es verdad. De esta manera la proposición es verdadera.
$\square$
Problema. Considera los siguientes predicados:
$P(x): 2x>0$
$Q(x):x>0$
$R(x): x=20$
$T(x):x<0$
Determina la verdad o falsedad de las siguientes proposiciones, considerando que nuestro universo de discurso son los números enteros. Si la proposición no es verdadera, da un contraejemplo o explicación de ello.
$\forall x: (P(x) \Rightarrow Q(x))$
$\exists x: (Q(x) \land T(x))$
$\forall x: (R(x) \Rightarrow Q(x))$
$\exists ! x:(R(x))$
$ \nexists x :(Q(x) \land P(x))$
Solución.
$\forall x:(P(x) \Rightarrow Q(x))$
Nota que siempre que se cumple $2x>0$ entonces $x>0$ (más adelante demostrarás esto con toda formalidad, pero de momento lo daremos por cierto). Por lo tanto la proposición es verdadera.
$\exists x: (Q(x) \land T(x))$
Para que esto sucediera, necesitaríamos la existencia de al menos un elemento $x$ que cumpla $0<x$ y $x>0$, es decir necesitaríamos un elemento que sea positivo y negativo a la vez, pero esto no es posible. Por lo tanto la proposición es falsa.
$\forall x:(R(x) \Rightarrow Q(x))$
Lo que nos dice esta proposición es «Para todo número entero $x$ que cumpla $x=20$ entonces $x>0$» o dicho de otra manera: «Si un número entero es igual a 20, entonces será positivo.» Lo cuál es correcto, pues si el número es distinto a 20, la implicación será correcta (recuerda la tabla de verdad de la implicación), mientras que el único caso en donde la hipótesis se cumple es cuando $x=20$ y claramente es un número que cumple $x>0$. Entonces la proposición es verdadera.
$\exists ! x:(R(x))$
Esto nos quiere decir que existe un único número entero que sea igual a 20, e inmediatamente podemos saber que es verdadera, pero ¿A qué nos referiremos que un número sea igual a 20? Primero tendríamos que ponernos de acuerdo de qué significa la igualdad. Aunque ahora no lo haremos, piensa el cómo nos aseguraríamos de que es el único número entero que cumple esa propiedad. ¿Qué pasaría si no fuera cierto?
$ \nexists x: (Q(x) \land P(x))$
Lo que dice la proposición es que ningún número $x$ va a cumplir a la vez $x>0$ y $2x>0$, pero esto no es cierto, pues pensemos en $x=1$. Cumple $Q(x)$ ya que $1>0$ y cumple $P(x)$ porque $2\cdot 1=2>0$. Entonces podemos decir que es falso pues dimos un contraejemplo que contradijo la proposición.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»