Introducción
Después de algunas entradas muy técnicas, en las que hemos demostrado dos resultados sumamente importantes (el teorema de la función inversa y el teorema de la función implícita), pasaremos brevemente a una entrada un poco más ligera en términos de teoría, pero también relevante. En esta entrada nos volcaremos a una cara más práctica del cálculo diferencial e integral.
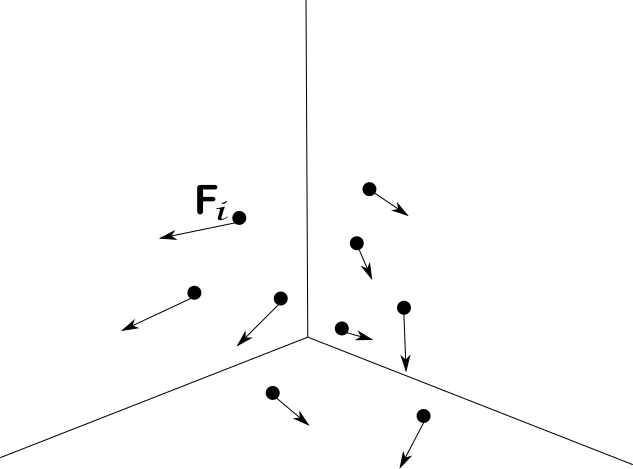
Recordemos que un campo vectorial es una función $F:S\subseteq \mathbb{R}^{n}\rightarrow \mathbb{R}^{m}$. El nombre de campo vectorial está justificado con que a cada punto de un espacio base $\mathbb{R}^n$, estamos asignando otro vector, en $\mathbb{R}^m$. Si pegamos a cada vector del dominio el vector que le corresponde en a partir de $F$, podemos tener otra intuición geométrica de lo que hacen estas funciones. En la figura 1 apreciamos un ejemplo de esto, donde tenemos un campo vectorial $F$ de $\mathbb{R}^{3}$ en $\mathbb{R}^{3}$ y entonces a cada vector de $\mathbb{R}^3$ le estamos «pegando una flecha».
Esta manera de pensar a los campos vectoriales se presta mucho para entender propiedades físicas de los objetos: flujo eléctrico, flujo de calor, fuerza, trabajo, etc. Si pensamos en esto, otros conceptos que hemos estudiado también comienzan a tener significado. Por ejemplo, el gradiente de un campo escalar está íntimamente relacionado a otras propiedades físicas descritas por el campo escalar. Un ejemplo que hemos discutido es que el gradiente, por ejemplo, nos da la dirección de cambio máximo.
Un ejemplo más concreto sería el siguiente. Pensemos en $\mathbb{R}^{3}$ en un sólido $S$ y un campo escalar $T:S\rightarrow \mathbb{R}$ que da la temperatura de cada punto del sólido. Si consideramos la expresión $\textbf{J}=-k\triangledown T$, obtenemos lo que se conoce como el flujo de calor. Tiene sentido. Por lo que aprendemos en educación elemental, el calor va de los puntos de mayor temperatura a los de menor temperatura. El gradiente $\triangledown T$ da la dirección de máximo crecimiento. Pero entonces $-\triangledown T$ da la dirección de máximo descenso (así como su magnitud). La $k$ que aparece tiene que ver con qué tan bien el material del que hablamos transmite el calor.
Notación tradicional de los campos vectoriales
En el ámbito de las aplicaciones generalmente se usa la notación con gorros. Veamos un ejemplo de cómo escribir con esta notación. En vez de escribir para $\bar{v}\in \mathbb{R}^{3}$ la expresión $\bar{v}=(x,y,z)$, escribimos $$\bar{v}=x\hat{\imath}+y\hat{\jmath}+z\hat{k},$$ es decir, podemos pensar que $\hat{\imath}=(1,0,0)$, $\hat{\jmath}=(0,1,0)$, $\hat{k}=(0,0,1)$.
Si $F:\mathbb{R}^3\to \mathbb{R}^3$ es un campo vectorial, escribimos $$F=P\hat{\imath}+Q\hat{\jmath}+R\hat{k},$$ donde $P$, $Q$ y $R$ son los campos escalares componente, que cada uno de ellos va de $\mathbb{R}^3$ a $\mathbb{R}$.
Generalmente escribimos también $$F(x,y,z)=P(x,y,z)\hat{\imath}+Q(x,y,z)\hat{\jmath}+R(x,y,z)\hat{k}$$ tras evaluar.
Con esta notación también podemos escribir al gradiente y pensarlo como un «operador» que manda campos escalares a campos vectoriales. A este operador se le llama operador nabla. Lo escribimos de la siguiente manera:
\[ \triangledown =\frac{\partial}{\partial x}\hat{\imath}+\frac{\partial}{\partial y}\hat{\jmath}+\frac{\partial}{\partial z}\hat{k}. \]
Si tenemos un campo escalar $\phi:\mathbb{R}^3\to \mathbb{R}$, entonces el operador hace lo siguiente
\[ \triangledown \phi (x,y,z)=\frac{\partial \phi (x,y,z)}{\partial x}\hat{\imath}+\frac{\partial \phi (x,y,z)}{\partial y}\hat{\jmath}+\frac{\partial \phi (x,y,z)}{\partial z}\hat{k}.\]
Es decir, a partir de $\phi$ obtenemos su gradiente.
Líneas de flujo
Ahora introducimos el concepto de línea de flujo el cual es muy usado para campos vectoriales en el modelado fenómenos físicos.
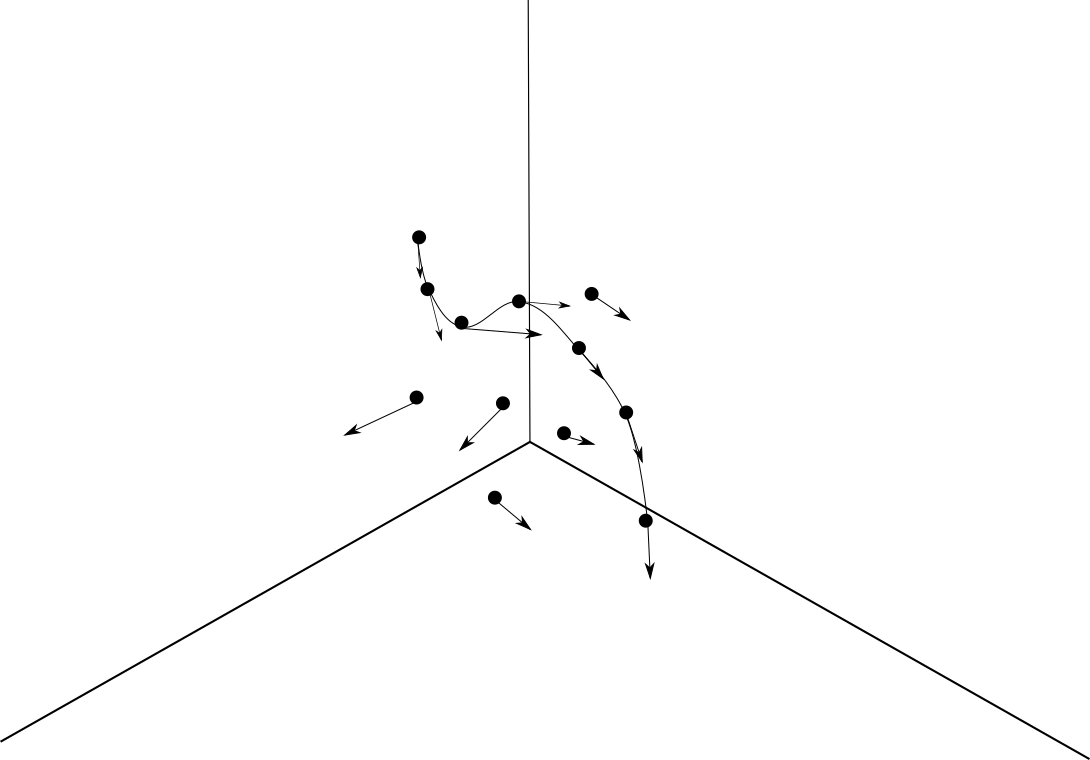
Definición. Si $F:\mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ es un campo vectorial, una línea de flujo para $F$ es una función $\alpha :U\subseteq \mathbb{R}\rightarrow \mathbb{R}^{n}$ tal que $\alpha^{\prime}(t)=F(\alpha(t))$ para todo $t\in U$.
Es decir una línea de flujo es una trayectoria sobre la cual $F$ asigna en cada punto de ella su correspondiente vector tangente. En la Figura 2 tenemos una ilustración de una línea de flujo en un campo vectorial.
Divergencia
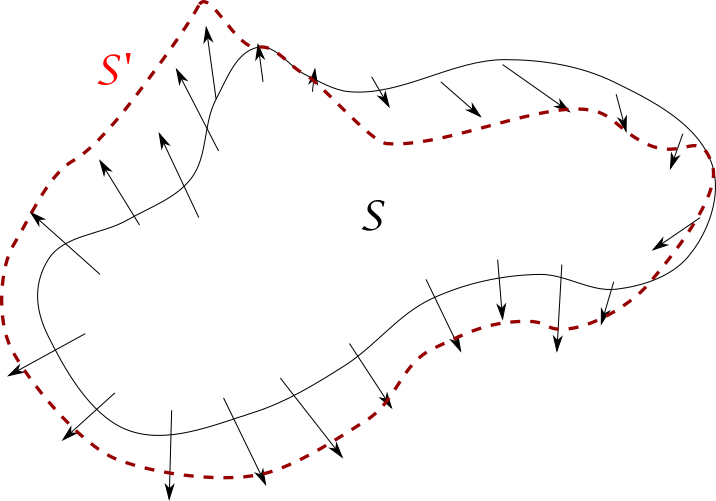
Supongamos que tenemos en el plano (o el espacio) una región $S$. Para cada punto $\bar{x}$ de $S$ sea $\textbf{x}(t)$ una línea de flujo que parte de $\bar{x}$ bajo el campo vectorial $F$. El conjunto de líneas $\textbf{x}(t)$ describe cómo cambia el conjunto $S$ bajo la acción de $F$ a través del tiempo. Formalizando esto un poco, en el caso del plano tomemos $F:S\subseteq \mathbb{R}^{2}\rightarrow \mathbb{R}^{2}$. Para cada $\bar{x}\in S$ podemos considerar $\gamma_x:I_{x}\subset \mathbb{R}\rightarrow \mathbb{R}^{2}$, como la trayectoria $\textbf{x}(t)$ y que es línea de flujo bajo $F$. Estas trayectorias van mostrando «cómo se va deformando $S$ a causa del campo vectorial $F$». También, consideremos al conjunto $S’=\{\bar{x}+F(\bar{x})|\bar{x}\in S \}$, al cual pensaremos como el conjunto resultante de aplicar a $S$ el campo vectorial $F$.
Estas nociones se pueden analizar a través de una herramienta llamada divergencia. La definimos a continuación, pero una demostración formal de que el operador divergencia mide la expansión del efecto de un campo vectorial es un tema que se estudia en un cuarto curso de cálculo diferencial e integral.
Damos la definición en $\mathbb{R}^3$, pero podrías dar una versión análoga para $\mathbb{R}^2$.
Definición. Si $F=P\hat{\imath}+Q\hat{\jmath}+R\hat{k}$ es un campo vectorial definimos la divergencia de $F$ como:
\[ \triangledown \cdot F=\frac{\partial P}{\partial x}+\frac{\partial Q}{\partial y}+\frac{\partial R}{\partial z}.\]
En dimensiones más altas, si $F=(F_{1},\dots ,F_{n})$, entonces $\triangledown \cdot F=\sum_{i=1}^{n}\frac{\partial F_{i}}{\partial x_{i}}$.
Rotacional
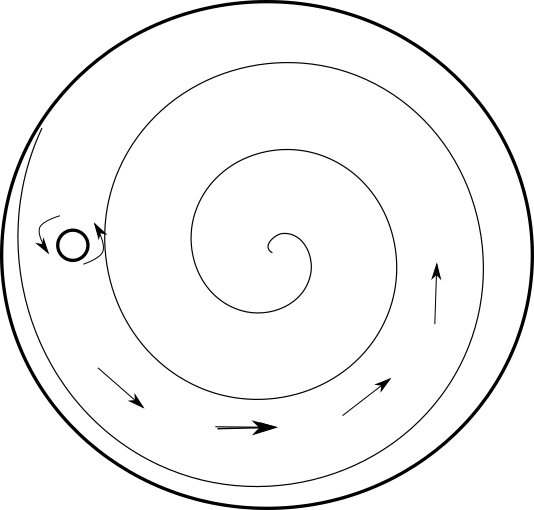
Pensemos en un fluido que se mueve de acuerdo con el flujo marcado por el campo vectorial $F$. Tenemos una forma de determinar la rotación que el fluido imprimiría sobre un sólido llevado por él. Imaginemos un remolino y una pequeña esfera solida llevada por el remolino. Lo que llamaremos el rotacional del vector nos proporcionará la información sobre las rotaciones sobre su eje que el fluido imprime a la pequeña esfera (Figura 4).
Definición. Sea $$F(x,y,z)=F_{1}(x,y,z)\hat{\imath}+F_{2}(x,y,z)\hat{\jmath}+F_{3}(x,y,z)\hat{k}.$$ Entonces definimos al rotacional de $F$ como el siguiente campo vectorial:
\[ \triangledown \times F(x,y,z)=\left( \frac{\partial F_{3}}{\partial y} – \frac{\partial F_{2}}{\partial z} \right)\hat{\imath}+\left( \frac{\partial F_{1}}{\partial z}-\frac{\partial F_{3}}{\partial x} \right)\hat{\jmath}+\left( \frac{\partial F_{2}}{\partial x}-\frac{\partial F_{1}}{\partial y} \right)\hat{k}.\]
También suele representarse por el siguiente determinante:
\[ \triangledown \times F=\begin{vmatrix} \hat{\imath} & \hat{\jmath} & \hat{k} \\ {\large \frac{\partial}{\partial x}} & {\large \frac{\partial}{\partial y}} & {\large \frac{\partial}{\partial z}} \\ F_{1} & F_{2} & F_{3} \end{vmatrix}. \]
Una visión mas clara de por qué esta expresión calcula lo que queremos se puede aprender en un cuarto curso de cálculo diferencial e integral, o bien en algún curso de aplicaciones del cálculo a la física. Por ahora veremos en los ejemplos solamente la parte operativa.
Laplaciano
Hay un operador más que surge naturalmente en las ecuaciones que involucran al gradiente y a la divergencia.
Definición. Sea $f:\mathbb{R}^3\to \mathbb{R}$ un campo escalar. El operador laplaciano se establece de la siguiente manera:
\[ \triangledown ^{2}f=\frac{\partial ^{2}f}{\partial x^{2}}\hat{\imath}+\frac{ \partial^{2}f}{\partial y^{2}}\hat{\jmath}+\frac{\partial ^{2}f}{\partial z^{2}}\hat{k}. \]
Es decir, el laplaciano consiste en aplicar el operador divergencia al gradiente de un campo escalar.
Ejemplos de problemas de los conceptos anteriores
Revisemos algunos problemas que tienen que ver con estos operadores. Esto nos permitirá ampliar nuestra visión en cuanto a la practicidad de esta herramienta matemática.
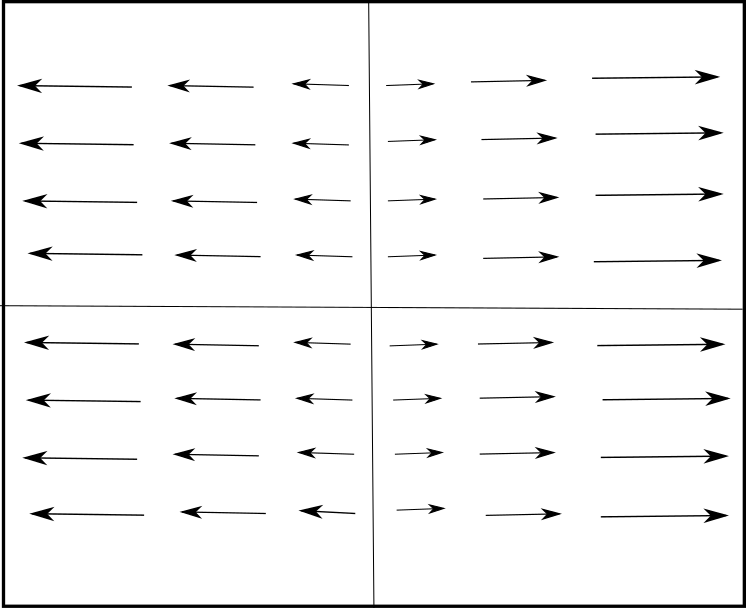
Consideremos el siguiente campo vectorial en el plano $F(x,y)=x\hat{\imath}$. Pensaremos el signo de la divergencia de $F$ como la razón del cambio de áreas bajo este campo. Interpretaremos a $F$ como aquel que asigna a cada punto del plano un vector velocidad de un fluido en el plano.
Para $x>0$ el campo apunta hacia la derecha con vectores paralelos al eje $x$ con tamaño $|x|$, para $x<0$ los vectores apuntan a la izquierda paralelamente al eje $x$ con tamaño $|x|$ (Figura 5). Por ello las longitudes de las flechas de $F$ son mas cortas en torno al origen; así cuando el fluido se mueve, se expande. Y esto coincide con el hecho de que $\triangledown \cdot F=1$.
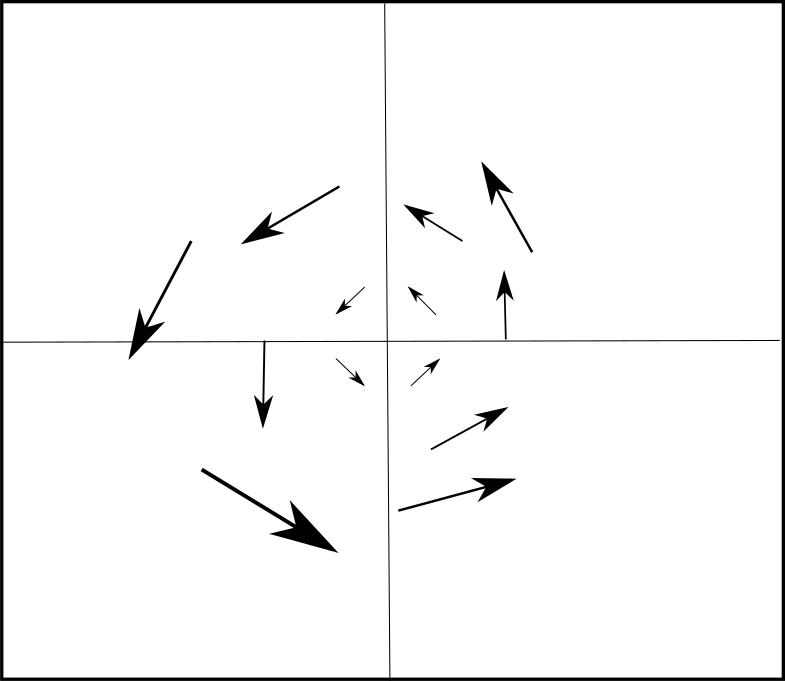
En el siguiente ejemplo consideremos el campo vectorial $F(x,y)=-y\hat{\imath}+x\hat{\jmath}$. Las líneas de flujo de $F$ siguen circunferencias concéntricas centradas al origen en dirección contrarias a las manecillas del reloj. Al calcular la divergencia tenemos lo siguiente:
\[ \triangledown \cdot F=\frac{\partial }{\partial x}(-y)+\frac{\partial}{\partial y}(x)=0. \]
En la figura 6 tenemos la ilustración de cómo se ve el campo de este ejemplo. Suena razonable. En este caso el fluido no se está expandiendo, sino que más bien está rotando.
En el laplaciano aplicamos la divergencia a un gradiente. Pero, ¿qué pasa cuando aplicamos el rotacional a un gradiente? Consideremos una función $f$ con derivadas parciales diferenciables continuas es decir, de clase $C^{2}$. Para una función así tenemos
\[ \triangledown f(x,y,z)=(\partial f/\partial x,\partial f/ \partial y,\partial f/\partial z). \]
De acuerdo con la definición de rotacional, tenemos:
\begin{align*} \triangledown \times (\triangledown f)&= \begin{vmatrix} \hat{\imath} & \hat{\jmath} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ \frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} & \frac{\partial f}{\partial z} \end{vmatrix}\\ &= \left( \frac{\partial ^{2}f}{\partial y\partial z}-\frac{\partial ^{2}f}{\partial z\partial y} \right)\hat{\imath}+\left( \frac{\partial ^{2}f}{\partial z\partial x}-\frac{\partial ^{2}f}{\partial x \partial z} \right)\hat{\jmath}+\left( \frac{\partial ^{2}f}{\partial x\partial y}-\frac{\partial ^{2}f}{\partial y\partial x} \right)\hat{k}\\ &=\bar{0} \end{align*}
por la igualdad de las parciales mixtas. Es decir; si $f$ es un campo escalar cuyas derivadas parciales son diferenciables con derivada continua tenemos $\triangledown \times \triangledown f=0$.
Esto nos puede ayudar a saber si una cierta función puede obtenerse como gradiente de otra. Tomemos $G(x,y,z)= y\hat{\imath}-x\hat{\jmath}$. Notemos que las funciones en $\hat{\imath}$ y en $\hat{\jmath}$ son diferenciables con derivada continua. Entonces nos preguntaremos ¿$G$ es gradiente de un campo escalar? Para ello calculemos $\triangledown \times G$ cuyo resultado en caso afirmativo debería ser igual a cero. Sin embargo,
\[ \triangledown \times G=\begin{vmatrix} \hat{\imath} & \hat{\jmath} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ y & -x & 0 \end{vmatrix}=-2\hat{k}\neq 0,\]
por lo tanto $G$ no es un gradiente.
También tenemos que la divergencia de un rotacional es igual a cero, es decir si $F$ es un campo vectorial $\triangledown \cdot (\triangledown \times F)=0$. Queda como tarea moral demostrar este hecho.
Mas adelante…
Con esta entrada terminamos nuestro estudio de conceptos relacionados con campos vectoriales. Sin embargo, aún no los descartaremos por completo. Retomaremos a los campos vectoriales en la última unidad del curso. En ella, retomaremos varias partes de la teoría para establecer resultados de optimización de campos escalares, y de funciones bajo restricciones.
Tarea moral
- Para los siguientes campos vectoriales, halla su divergencia
- $F(x,y)=x^{3}\hat{\imath}+x\hspace{0.1cm}sen\hspace{0.1cm}(xy)\hat{\jmath}$
- $G(x,y,z)=e^{xy}\hat{\imath}+e^{xy}\hat{\jmath}+e^{yz}\hat{k}$.
- Obtén el rotacional de los siguientes campos vectoriales:
- $F(x,y,z)=(x^{2}+y^{2}+z^{2})(3\hat{\imath}+4\hat{\jmath}+5\hat{k})$
- $G(x,y,z)=yz\hat{\imath}+xz\hat{\jmath}+xy\hat{k}$.
- Dibuja algunas líneas de flujo del campo $F(x,y)=-3x\hat{\imath}-y\hat{\jmath}$. Calcula $\triangledown \cdot F$ y explica el significado del resultado de la divergencia en su relación con las líneas de flujo.
- Demuestra que $\triangledown \cdot (\triangledown \times F)=0$
- Sean $f$ y $g$ dos campos escalares diferenciables, y $F$, y $G$ dos campos vectoriales diferenciables. Demuestra las siguientes identidades (solo usa la parte operativa, piensa que todos los campos tanto los vectoriales como los escalares tienen el mismo dominio):
- $\triangledown \cdot gG =g(\triangledown \cdot G) + G\cdot (\triangledown g)$
- $\triangledown (fg)=f(\triangledown g) +g (\triangledown f)$
- $\triangledown \cdot (F\times G)= G\cdot (\triangledown \times F)-F\cdot (\triangledown \times G)$
Entradas relacionadas
- Ir a Cálculo Diferencial e Integral III
- Entrada anterior del curso: Ejemplos e intuición del teorema de la función implícita
- Entrada siguiente del curso: Puntos críticos de campos escalares