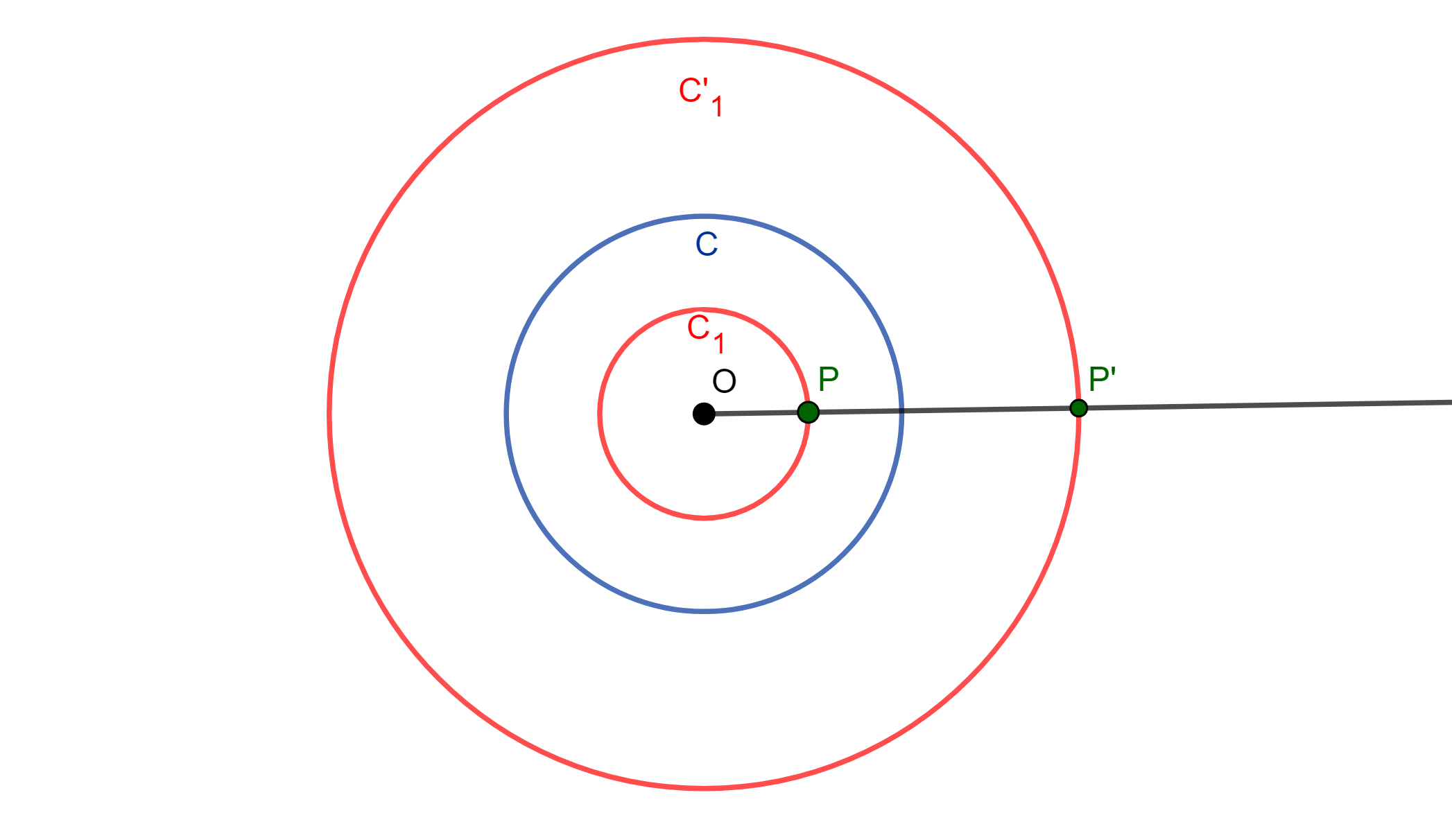
De la definición de Inversión se tiene la siguiente propiedad, se tienen $P$ y $P’$ dos puntos inversos respecto a la circunferencia $C(O,r)$, y cada uno de estos describe una curva, $P$ describe a $C$ y $P’$ describe a $C’$. Estas curvas son inversas una de la otra, se les llama mutuamente inversas.
Inversión de Rectas y Circunferencias
Se tienen 2 curvas $C$ y $C’$ inversas una de la otra, las cuales se intersecan, esto lo hacen sobre la circunferencia de Inversión, debido a que el punto en común debe ser su propio inverso, y el inverso de un punto en la $C(O,r)$ es el propio punto en la circunferencia de inversión. Dado lo anterior se puede ver la inversión aplicada a 2 objetos geométricos: Rectas y Circunferencias.
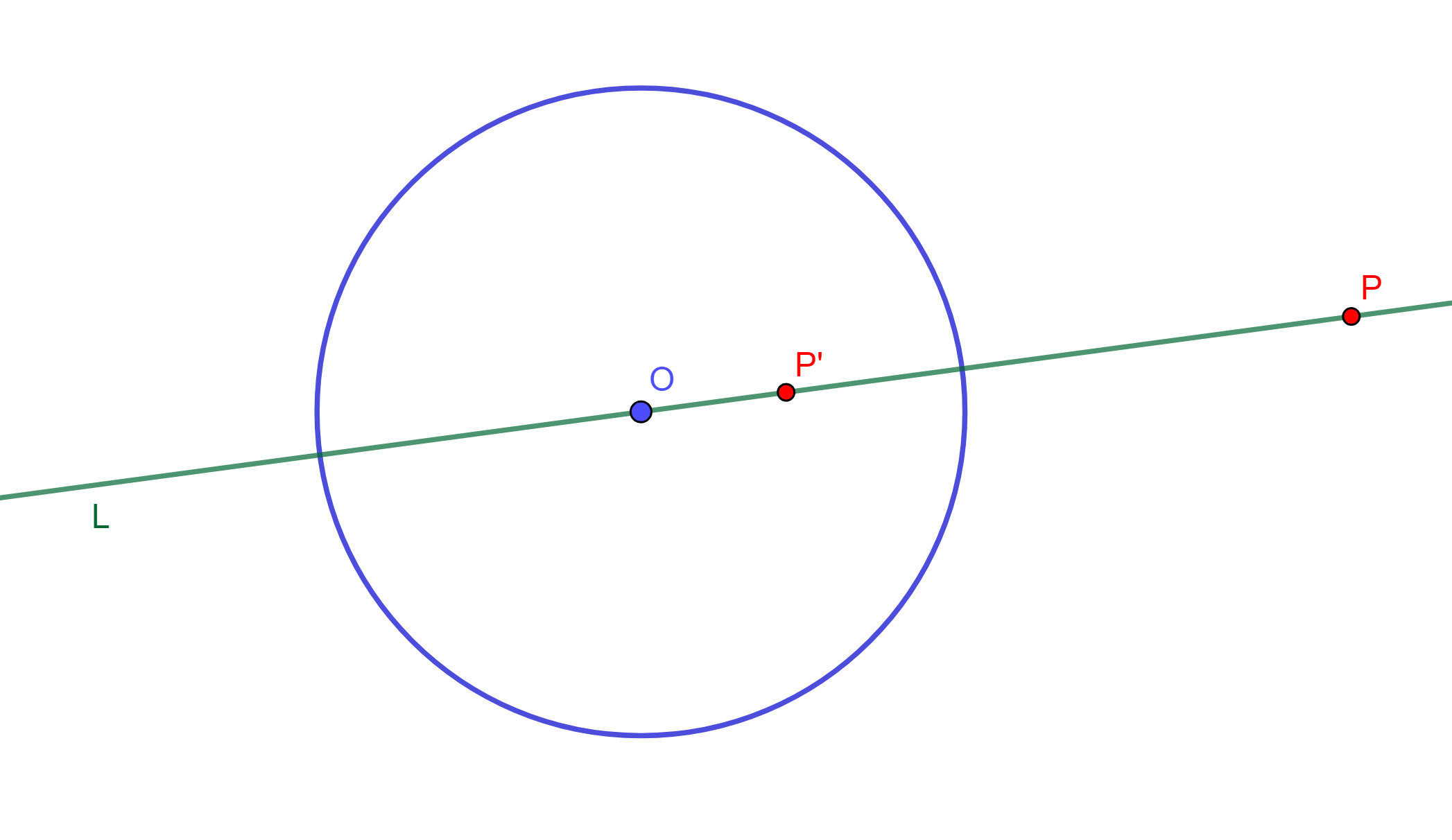
Teorema. Sea $C(O,r)$ una circunferencia de inversión y $L$ una recta que pasa por $O$, entonces el inverso de $L$ respecto a $C(O,r)$ es el mismo $L$.
Demostración. Tenemos una circunferencia $C(O,r)$ y $L$ una recta por $O$, además todo punto $P$ en $L$ tiene su inverso $P’$ tal que $O,P$ y $P’$ son colineales entonces $OP \times OP’ =r^2$.
Por lo cual los inversos de los puntos de $L$, también están en la misma recta $L$. Por lo tanto, $L$ su inverso es el mismo $L$.
$\square$
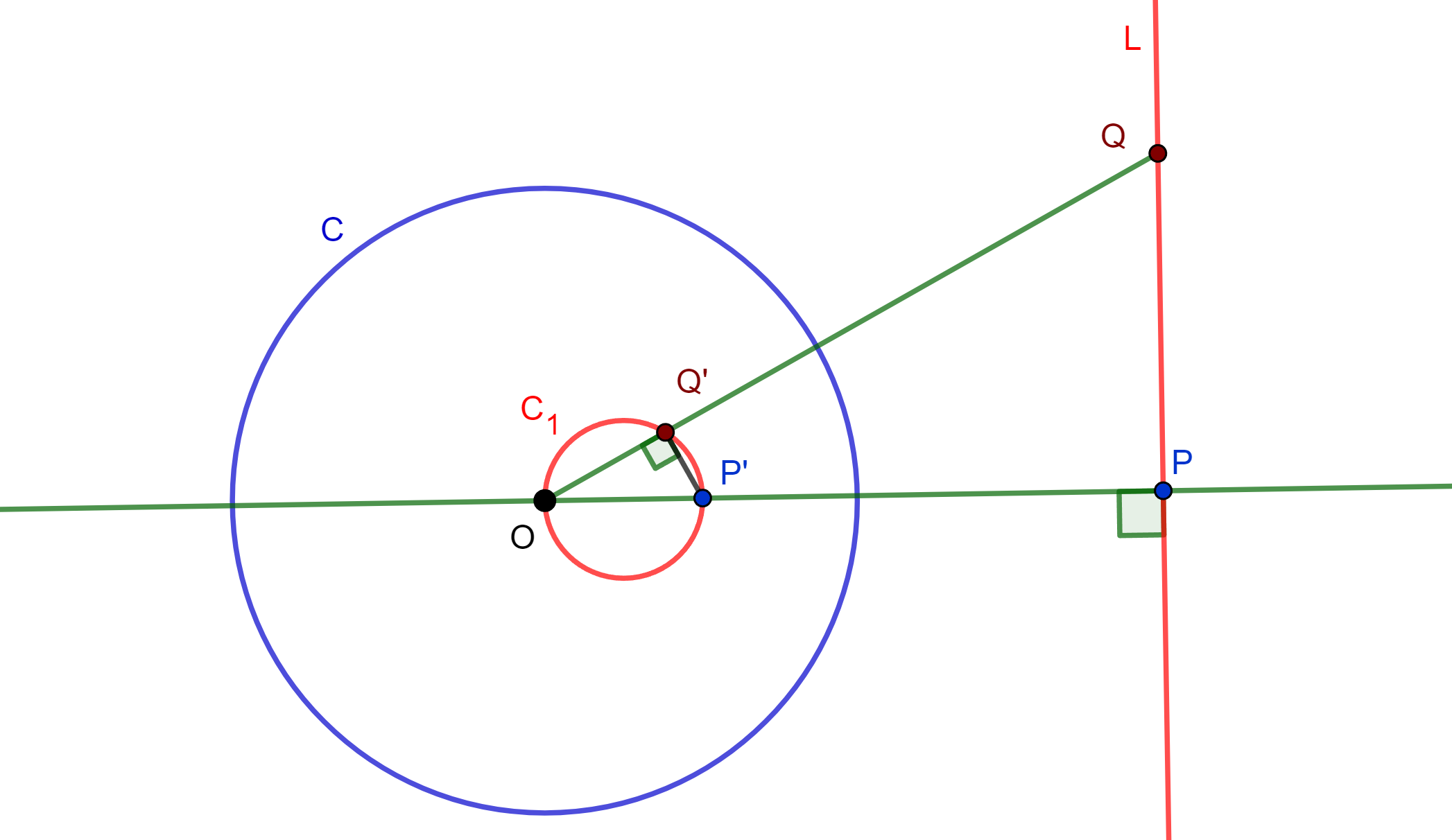
Teorema. Sea $C(O,r)$ una circunferencia de inversión y $L$ una recta que no pasa por $O$, entonces el inverso de $L$ respecto a $C$ es una circunferencia que pasa por $O$. Recíprocamente, el inverso de una circunferencia que pasa por el centro de inversión es una recta que no pasa por el centro de inversión.
Demostración. Sea $P$ el pie de la perpendicular desde $O$ a $L$ y sea $Q \neq P$, donde $Q \in L$ y de estos obtenemos $P’$ y $Q’$ los inversos respecto a $C$ de $P$ y $Q$ respectivamente.
$\Rightarrow OP \times OP’ =r^2$ y $OQ \times OQ’=r^2$
Esto ya que comparten 2 lados proporcionales y un ángulo en común $\angle O$. Ahora $\triangle OPQ$ es rectángulo, entonces $\triangle OQ’P’$ es rectángulo, por lo cual $OP’$ es un diámetro de una circunferencia que pasa por $Q’$.
Análogamente, si tuviéramos un $R \in L$, $R \neq P$ y $R \neq Q$, su inverso $R’$ cumplirá $\frac{OP}{OR’} = \frac{OR}{OP’}$, con lo que $\triangle OPR \approx \triangle OR’P’$, por lo cual $\triangle OR’P’ $ es rectángulo, como $OP’$ es fijo se sigue que la circunferencia del diámetro $OP’$ que pasa por $Q’$ también pasa por $R’$. Por lo tanto, el inverso de $L$ respecto a $C$ es $C_1$ una circunferencia que pasa por $O$.
$\square$
Inversamente, si $Q’$ es un punto de $C_1$ circunferencia, recorriendo al revés los pasos de la demostración anterior, que $Q$ está en la perpendicular a la línea del diámetro $OP’$ que pasa por el inverso de $P’$.
$\square$
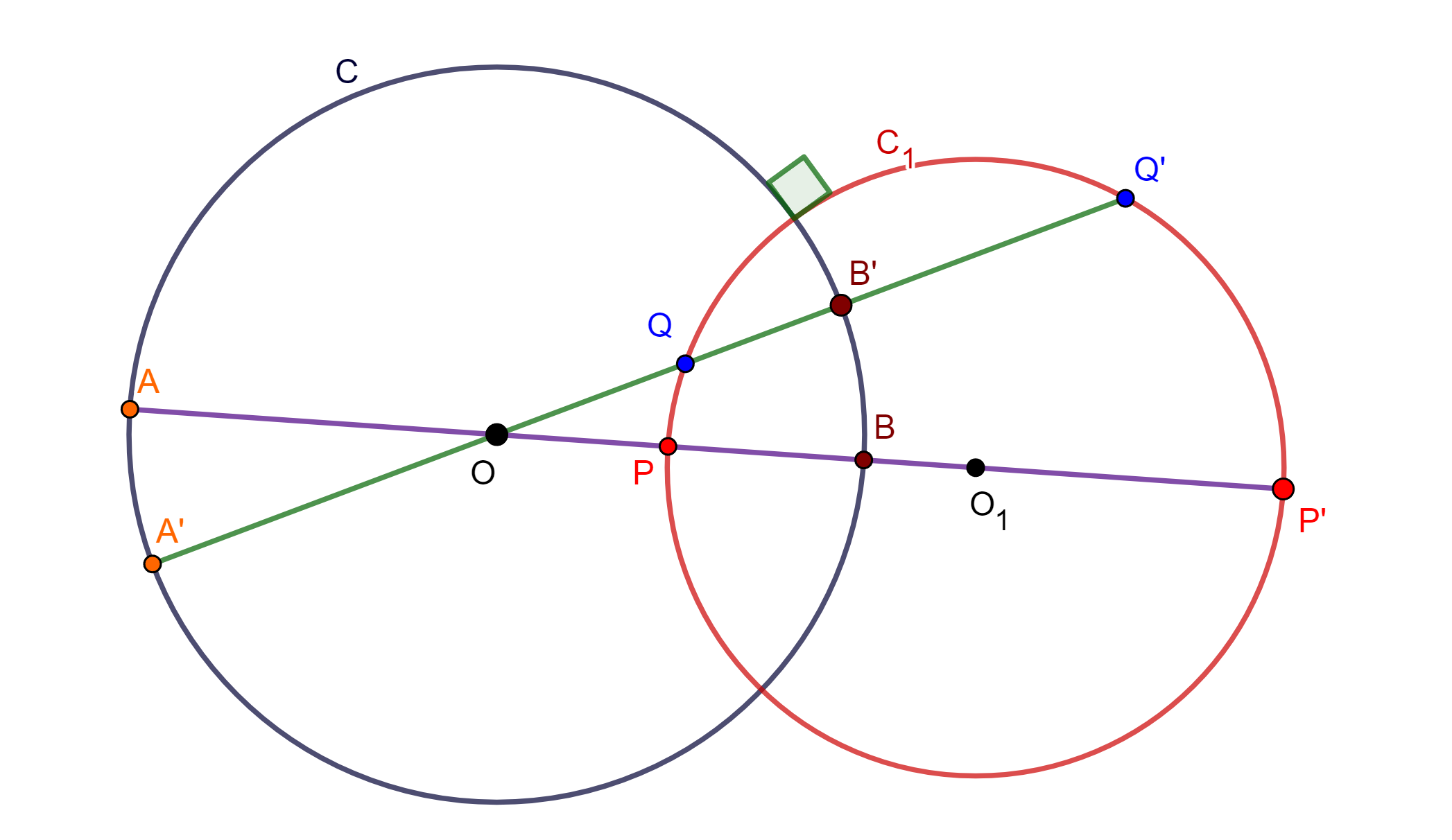
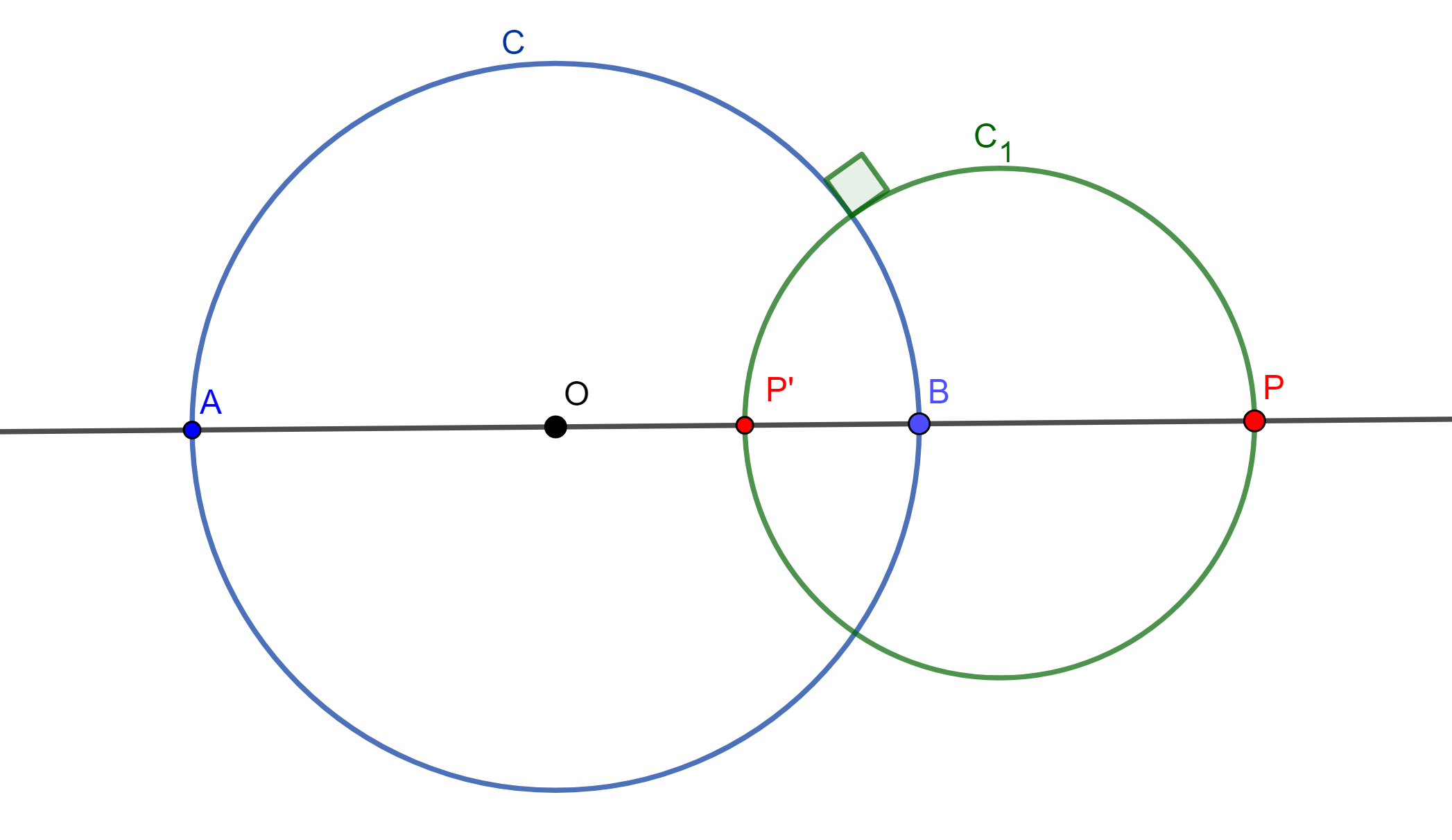
Teorema. Sea $C(O,r)$ una circunferencia de inversión y sea $C_1$ una circunferencia ortogonal a $C$, el inverso de $C_1$ es $C_1$.
Demostración. Se traza una recta que pase por $O$ y $O_1$, la cual nos genere intersecciones en $C$ las cuales son $A$ y $B$, de igual forma en $C_1$ se genera $P$ y $P’$.
Sea $C \perp C_1$ ortogonal, entonces $P$ y $P’$ son armónicos respecto a $A$ y $B$.
$\Leftrightarrow P$ y $P’$ son inversos respecto a $C$.
Tracemos una recta que pase por $O$ y corte a $C_1$ en $Q$ y $Q’ \in C_1$, y a $C$ en $A’$ y $B’ \in C$, tales que $Q$ y $Q’$ son armónicos respecto a $A’$ y $B’$
$\Leftrightarrow P$ y $P’$ son inversos respecto a $C$.
Todo punto en una circunferencia ortogonal a la de inversión tiene su inverso en ella misma. Por lo tanto, $C_1$ es su propia inversa.
$\square$
Tenemos observaciones que nos indica que los siguientes son sus propios inversos con respecto a la circunferencia de Inversión:
La propia circunferencia de Inversión
Rectas por el centro de Inversión
Circunferencias ortogonales a la circunferencia de Inversión
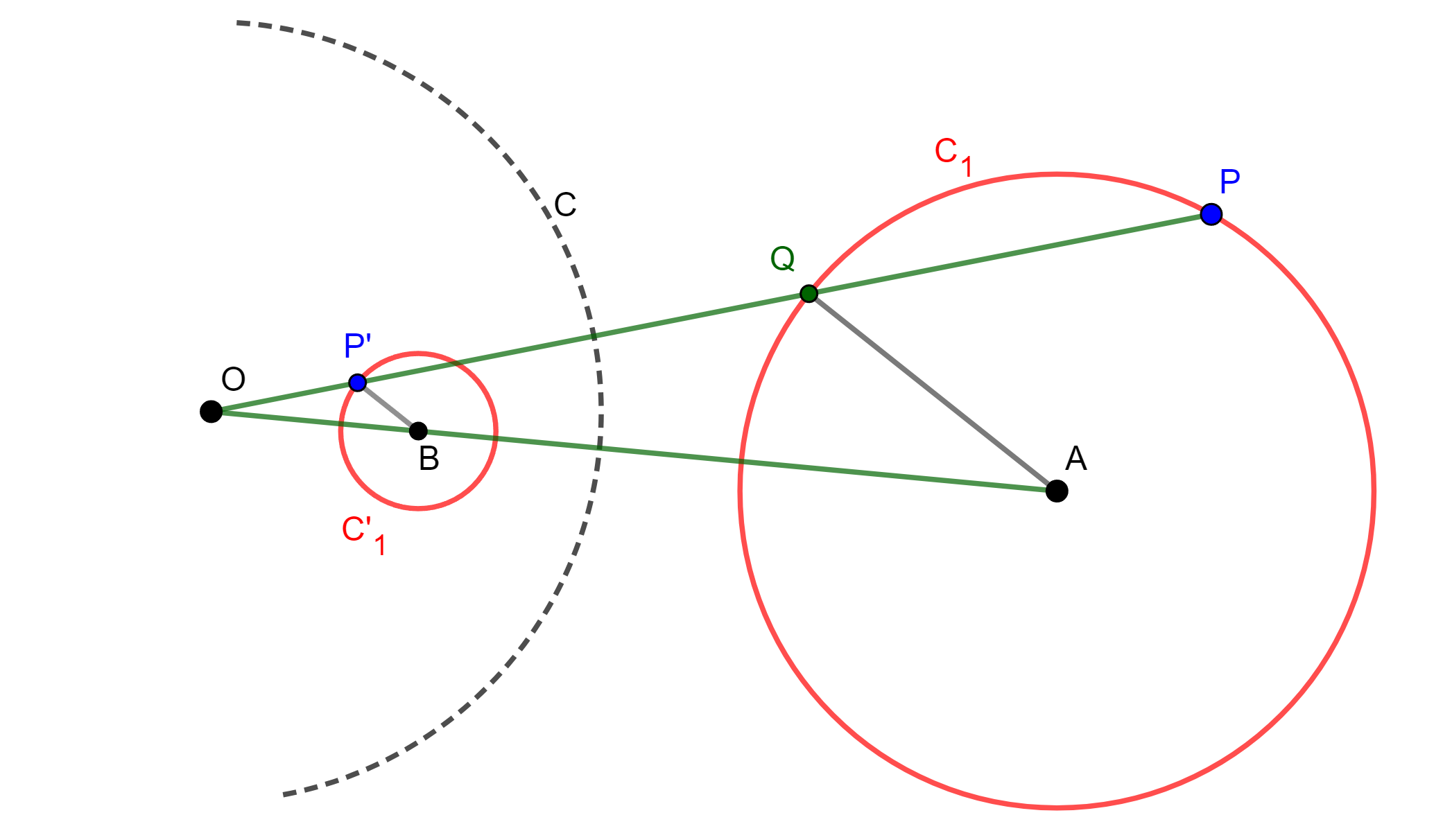
Teorema. El inverso de una circunferencia que no pasa por el centro de inversión, es otra circunferencia que tampoco pasa por el centro de Inversión.
Demostración. Tenemos $C_1$ una circunferencia con centro $A$, tomemos un punto $P$ sobre la circunferencia $C_1$, también tenemos $C(O,r)$ una circunferencia con centro de Inversión $O$.
Tracemos una recta $OP$, genera un punto de intersección $Q$, y se genera $P’$ inverso de $P$. Ahora tracemos la recta $OA$ y $QA$, además tracemos una paralela a $QA$ que interseque a $OA$ en $B$
Por definición de Inversión $OP \times OP’=r^2$ y $OQ \times OP = w$, ahora como los triángulos $\triangle OBP’$ y $\triangle OAQ$ son semejantes, entonces
Entonces $OB$ es constante, $B$ es un punto fijo y $BP’$ es finita y constante, entonces el lugar geometrico de $P’$ es una circunferencia $C’_1$, por lo cual el punto $P’$ no pasa por $O$.
Por lo tanto, el Inverso de $C_1$ es $C’_1$.
$\square$
Observación. Note que $P$ y $P’$ son puntos antihomologos, $Q$ y $P’$ son homólogos y $O$ es el centro de homotecia de las circunferencias $C_1$ con centro $A$ y $C’_1$ con centro $B$.
Teorema. El inverso de una circunferencia concéntrica con la circunferencia de inversión, es otra circunferencia concéntrica con la circunferencia de inversión.
Demostración. Sea $C(O,r)$ nuestra circunferencia de Inversión y $C_1$ una circunferencia concéntrica a $C$
Tomemos un punto en $C_1$ el cual es $P$, del cual su inverso es $P’$ con respecto a $C(O,r)$, entonces la distancia $OP$ es constante, al igual $r$ es constante y por definición de inversión $OP \times OP’ =r^2$ entonces $OP’=r^2/OP$ por lo cual $OP’$ es constante.
Por lo tanto, el inverso de $C_1$ es una circunferencia $C’_1$ con centro $O$ y radio $OP’$.
$\square$
Más adelante…
Otro aspecto a analizar de la inversión será la conservación de ángulos.
Una vez visto la potencia de un punto P, es hora de analizar una nueva transformación Inversión.
Puntos Inversos con respecto a una circunferencia
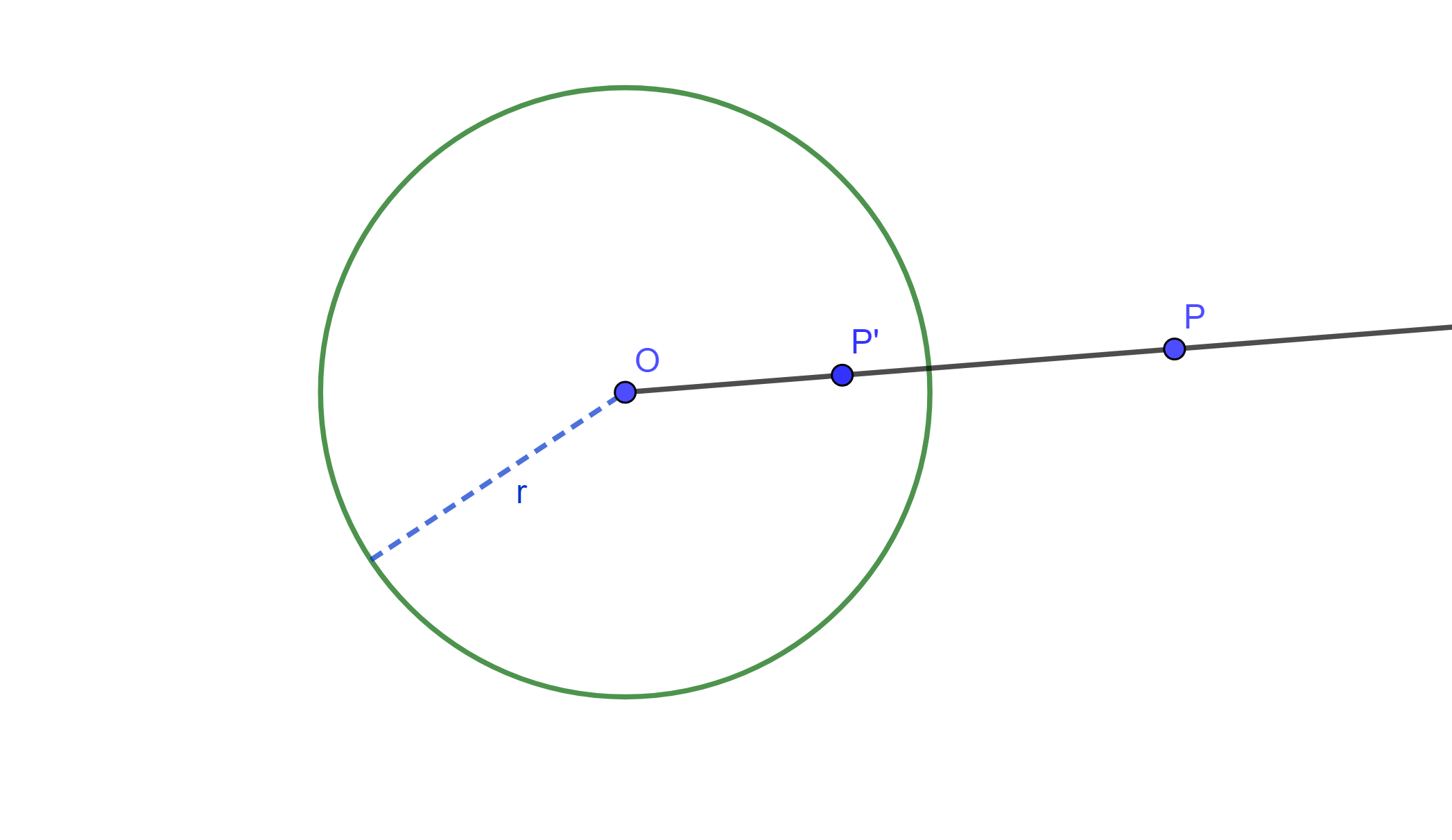
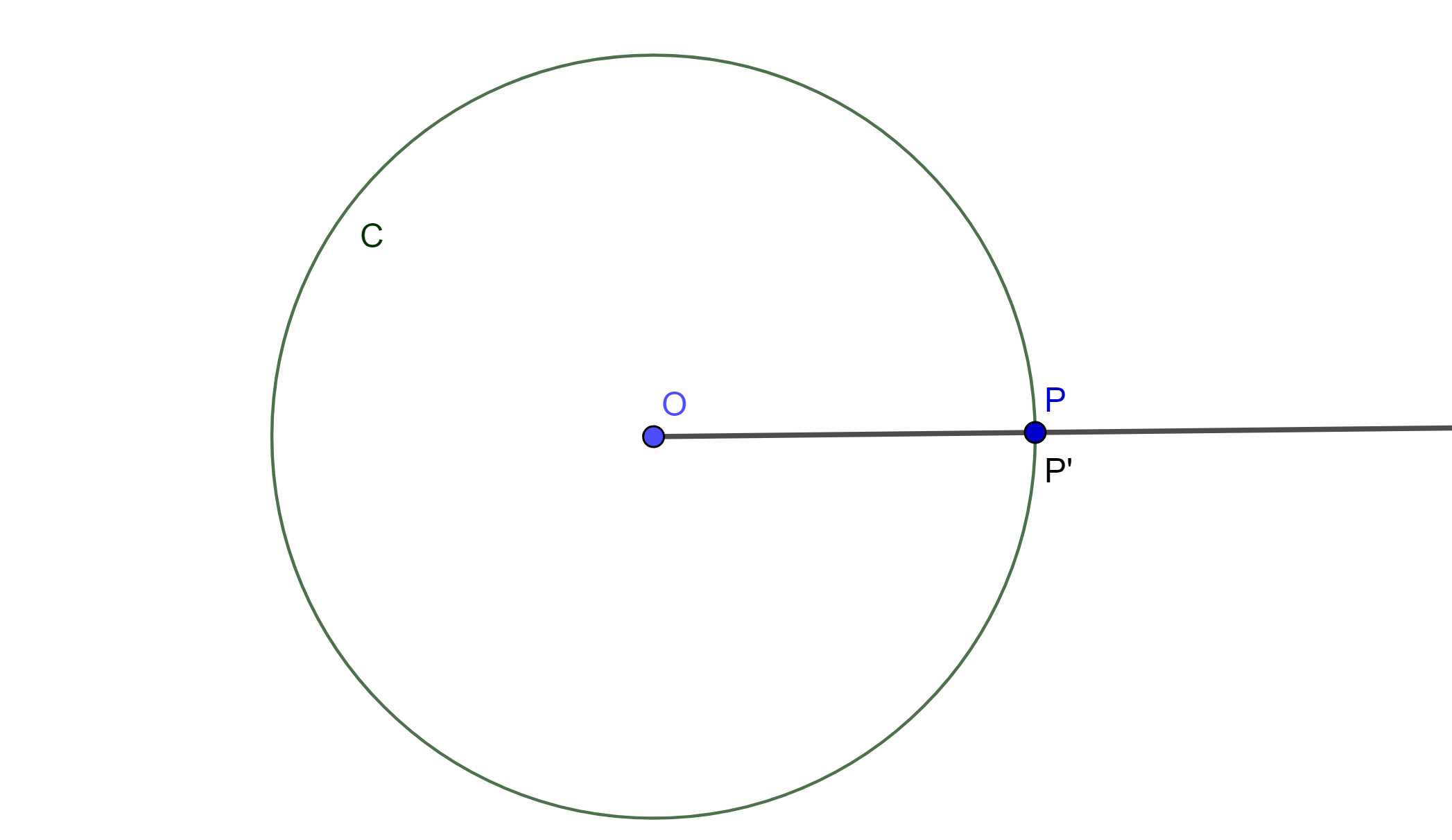
Definición. Sea una circunferencia $C(O,r)$ con centro $O$ y radio $r>0$. Si $P$ y $P’$ son dos puntos colineales con $O$ se tiene que $P’$ es el inverso de $P$ y viceversa si y solo si $P’O \times PO=r^2$.
El punto $O$ es el centro de Inversión, la circunferencia $C$ es la circunferencia de inversión, y su radio $»r»$ es el radio de inversión.
Esta es una relación simétrica, ya que $P’$ es inverso de $P$ y $P$ es inverso de $P’$ con respecto a la circunferencia $C(O,r)$.
Propiedades de Inversión
Cada punto en el plano, excepto el centro, tiene un inverso único.
El inverso de un punto en la circunferencia de inversión es su propio inverso.
El inverso de un punto interior a la circunferencia de inversión es siempre un punto exterior a la circunferencia de inversión.
De esta forma se puede construir el inverso de un punto $P$ con respecto a $C(O,r)$.
Proposición. Sea $C(O,r)$ una circunferencia y un punto $P$, por lo cual existe un $P’$ tal que $OP \times OP’ =r^2$.
Demostración. Se considera una circunferencia $C(O,r)$ y un punto $P$, pero existen 3 casos, el punto $P$ interno, externo y sobre la circunferencia $C(O,r)$.
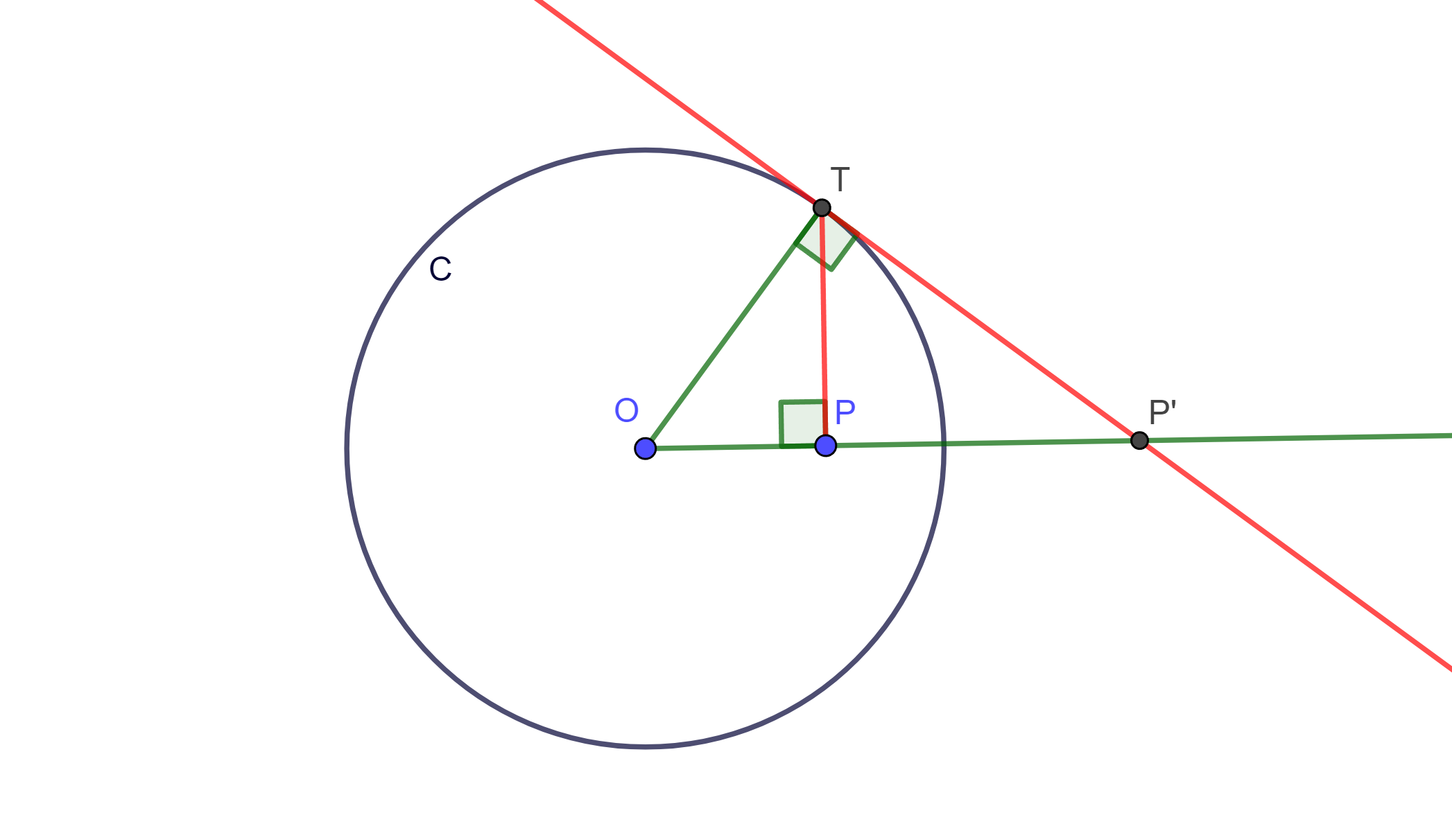
Caso 1. Sea $P$ interno a $C(O,r)$. Trazamos la perpendicular a $OP$ por $P$, donde la intersección es $T$ de la perpendicular a $C(O,r)$. Trazamos $OT$ y trazamos la tangente a $C(O,r)$ por $T$, llamemos $P’$ a la intersección de $OP$ con respecto a la tangente mencionada.
Por construcción $\angle OTP’ = \pi /2 = \angle OPT$, y los triangulos $\triangle OTP$ y $ \triangle OP’T$ comparten $\angle O$, por lo cual son semejantes, entonces $\triangle OTP \approx \triangle OP’T$.
$\Rightarrow \frac{OP’}{OT} = \frac{OT}{OP} \Leftrightarrow OP \times OP’ =r^2$.
$\square$
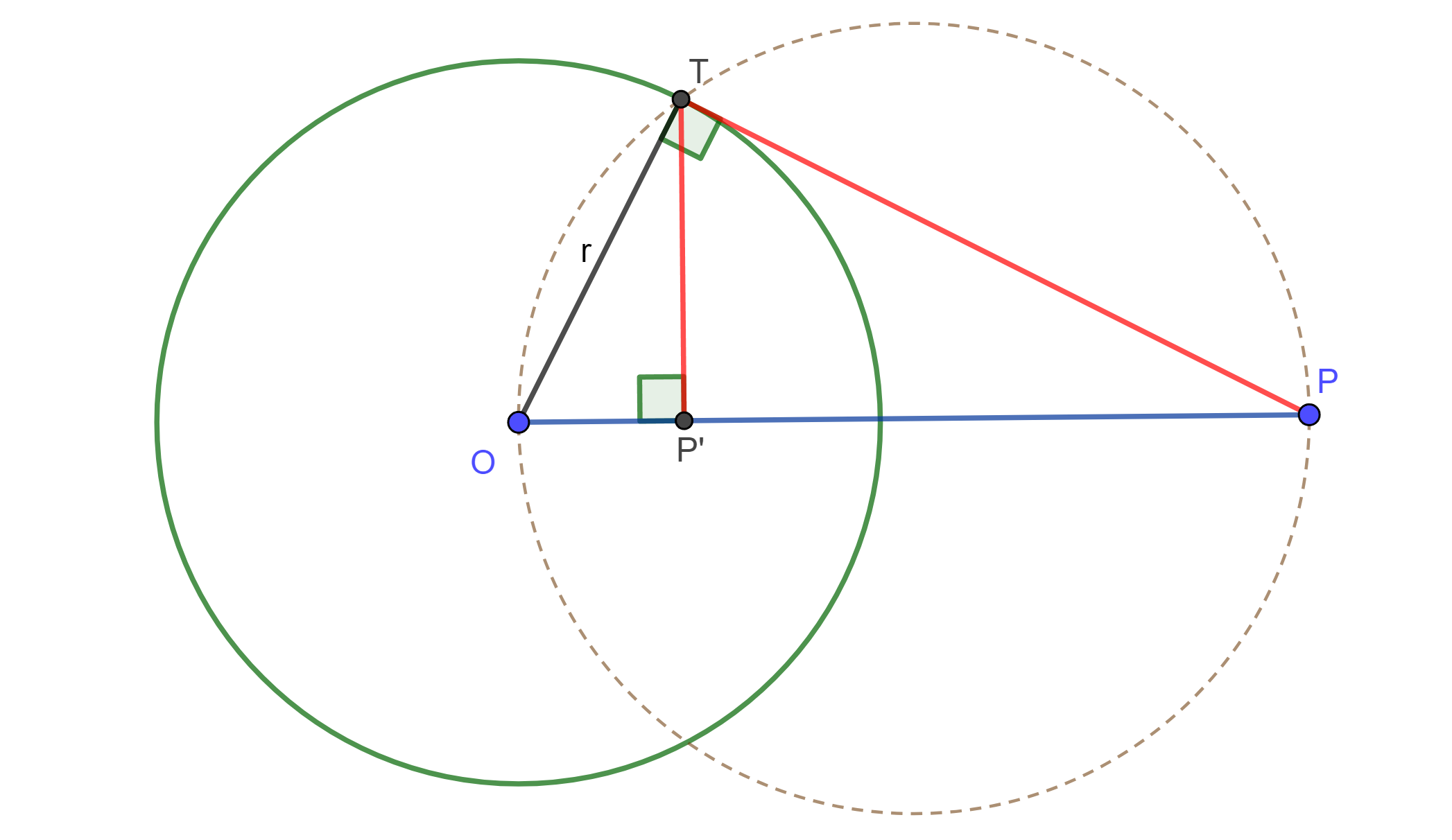
Caso 2. Sea $P$ externo a $C(O,r)$. Trazamos una circunferencia de diámetro $PO$ y unimos $P$ con la intersección de las 2 circunferencias, la cual llamaremos $T$. De $T$ sacamos la perpendicular respecto a $OP$, la intersección será $P’$.
El angulo $\angle OTP = \pi /2 $ ya que abarca el diametro $OP$. Ahora los $\triangle OP’T \approx \triangle OTP$ porque comparten $\angle TOP$ y $\angle OTP =\pi /2=\angle OP’T$
Caso 3. Sea $P$ está en $C(O,r)$. Su inverso $P’$ con respecto a $C(O,r)$ es colineal con $P$ y $O$, y además $OP=r$ entonces se debe cumplir $OP \times OP’ =r^2$
Ahora veremos un teorema que será útil más adelante.
Teorema. Sea $C(O,r)$ una circunferencia de inversión, $P$ y $P’$ dos puntos inversos respecto a $C$. Cualquier circunferencia que pase por $P$ y $P’$ es ortogonal a $C$.
Demostración. Sea $C$ una circunferencia y $OP$ un segmento, sean $A$ y $B$ los puntos donde $OP$ toca a $C$ y $B \in OP$
Por hipótesis $OP \times OP’ = r^2$ y $O$ es punto medio de $AB$ $\Rightarrow P’$ y $P$ son armónicos respecto a $A$ y $B$ $\Rightarrow (\frac{AP’}{P’B}) =-(\frac{AP}{PB})$ Ahora como $C$ pasa por $A$ y $B$, y $C_1$ pasa por $P’$ y $P$ entonces $C\perp C_1$.
$\square$
Más adelante
Una vez ya estudiado la definición de inversión y sus propiedades, es momento de analizar como afecta la inversión a otros objetos geométricos, en específico en Rectas y Circunferencias.
En esta entrada veremos algunos de los conceptos básicos, pero elementales, de las integrales para funciones complejas de variable real. Para ello recurriremos a algunos resultados de nuestros cursos de Cálculo.
Primeramente consideremos a una función híbrida $f(t)=u(t)+iv(t)$, con $t\in[a,b]\subset\mathbb{R}$ y $a<b$. Tenemos que $u(t)$ y $v(t)$ son ambas funciones reales de variable real. De acuerdo con nuestros cursos de Cálculo, sabemos que si $u$ y $v$ son funciones continuas en el intervalo $[a,b]$, entonces ambas son funciones Riemann-integrables para la variable $t$, es decir, las integrales de Riemann $\int_{a}^{b} u(t) dt$ y $\int_{a}^{b} v(t) dt$ existen. Considerando lo anterior tenemos la siguiente:
Definición 33.1. (Integral compleja de una función híbrida.) Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, y $f: [a,b] \to \mathbb{C}$ una función híbrida continua en $[a,b]$. Para $f(t) = u(t) + i v(t)$ se define a la integral de $f$ en $[a,b]$ como: \begin{equation*} \int_{a}^{b} f(t) \, dt := \int_{a}^{b} u(t)\, dt + i \int_{a}^{b} \,v(t) dt. \end{equation*}
Es decir, $\int_{a}^{b} f(t) \,dt$ existe si y solo si $\int_{a}^{b} u(t) \,dt$ y $\int_{a}^{b} v(t) \,dt$ existen, en tal caso se dice que $f$ es integrable.
Observación 33.1. Por nuestros cursos de Cálculo sabemos que una función real que es continua por partes o a trozos también es Riemann-integrable, por lo que, considerando la definición 32.3, podemos extender la definición 33.1 para funciones híbridas que son continuas a trozos.
Definición 33.2. (Integral compleja de una función híbrida a trozos.) Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, y $f: [a,b] \to \mathbb{C}$ una función híbrida continua a trozos en $[a,b]$. Para la partición: \begin{equation*} P : a=t_0 < t_1 < \cdots < t_{n-1}<t_n=b, \end{equation*}del intervalo $[a,b]$, se define a la integral de $f$ en $[a,b]$ como: \begin{equation*} \int_{a}^{b} f(t) \,dt = \displaystyle\sum_{k=1}^n \int_{t_k}^{t_{k-1}} f(t) \,dt. \end{equation*}
Observación 33.2. Recordemos que no es esencial que la función $f$ esté definida en los puntos $t_0, t_1, \ldots, t_n$ ya que el valor de $f$ en dicho conjunto finito de puntos se puede asignar o cambiar de forma arbitraria sin afectar el valor de la integral.
Debe ser claro que las integrales complejas de este tipo heredan todas las propiedades de la integral de funciones reales de variable real.
Proposición 33.1. Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, $f, g: [a,b] \to \mathbb{C}$ dos funciones híbridas continuas en $[a,b]$ y sea $k\in\mathbb{C}$ una constante. Se satisfacen las siguientes propiedades.
Si $f$ y $g$ son diferenciables en $(a,b)$ y continuas en $[a,b]$, entonces: \begin{equation*} \int_{a}^{b} f(t) g'(t)\,dt = f(b)g(b) – f(a)g(a) – \int_{a}^{b} f'(t) g(t)\,dt, \end{equation*}es decir, la integración por partes se cumple para funciones híbridas.
Es inmediata de la definición 33.1, por lo que los detalles se dejan como ejercicio al lector.
Se deja como ejercicio al lector.
Sean $f(t)=u(t)+iv(t)$ y $k=\alpha+i\beta$, con $\alpha, \beta\in\mathbb{R}$. Para toda $t\in[a,b]$ tenemos que: \begin{align*} k f(t) &= (\alpha+i\beta)(u(t)+iv(t))\\ &= \alpha u(t)- \beta v(t) + i\left[\alpha v(t) +i\beta u(t)\right]. \end{align*}Entonces, de la definición 33.1 y aplicando las propiedades de linealidad de las integrales de funciones reales, tenemos que: \begin{align*} \int_{a}^{b} k f(t) \, dt &= \int_{a}^{b} \left[\alpha u(t) – \beta v(t)\right] \, dt + i \int_{a}^{b} \left[\alpha v(t) +i\beta u(t)\right] \, dt\\ &= \alpha \int_{a}^{b} u(t) dt – \beta \int_{a}^{b} v(t) dt + i \left[\alpha \int_{a}^{b} v(t) dt +\beta \int_{a}^{b} u(t) dt\right]\\ & = (\alpha + i\beta) \left[\int_{a}^{b} u(t) dt + i \int_{a}^{b} v(t) dt\right]\\ & = k \int_{a}^{b} f(t) \, dt. \end{align*}
Se deja como ejercicio al lector.
Si $\displaystyle\int_{a}^{b} f(t)\,dt = 0$, entonces: \begin{equation*} \left|\int_{a}^{b} f(t)\,dt\right| = 0 \leq \int_{a}^{b}\left| f(t) \right| \,dt, \end{equation*}por lo que en tal caso no hay nada que probar.
Supongamos que $\displaystyle\int_{a}^{b} f(t)\,dt \neq 0$, entonces podemos escribir a la integral en su forma polar, es decir: \begin{equation*} \int_{a}^{b} f(t)\,dt = r e^{i\theta}, \end{equation*}donde $r=\left|\int_{a}^{b} f(t)\,dt\right|\geq 0$ y $\theta = \operatorname{arg}\left(\int_{a}^{b} f(t)\,dt\right)$.
Considerando lo anterior y la propiedad 3 tenemos que: \begin{equation*} r = \left|\int_{a}^{b} f(t)\,dt\right| = e^{-i\theta} \int_{a}^{b} f(t)\,dt = \int_{a}^{b} e^{-i\theta} f(t)\,dt. \end{equation*}Como las cantidades de la igualdad anterior son números reales, tomando la parte real de ambos lados de la igualdad, de la propiedad 1 se sigue que: \begin{equation*} \left|\int_{a}^{b} f(t)\,dt\right| = \operatorname{Re} \left(\int_{a}^{b} e^{-i\theta} f(t)\,dt\right) = \int_{a}^{b} \operatorname{Re} \left(e^{-i\theta} f(t)\right) \,dt. \end{equation*}Recordemos que para todo $z\in\mathbb{C}$ se cumple que $\operatorname{Re}(z) \leq |z|$, por lo que, considerando la monotonía de la integral para funciones reales y la proposición 20.2, tenemos que: \begin{align*} \left|\int_{a}^{b} f(t)\,dt\right| & = \int_{a}^{b} \operatorname{Re} \left(e^{-i\theta} f(t)\right) \,dt\\ & \leq \int_{a}^{b} \left|e^{-i\theta} f(t)\right| \,dt\\ & = \int_{a}^{b} \left|e^{-i\theta}\right| \left|f(t)\right| \,dt\\ & = \int_{a}^{b} \left|f(t)\right| \,dt. \end{align*}Notemos que el resultado se cumple sin importar la rama del argumento que elijamos.
Se sigue de desarrollar el producto de $f(t)$ y $g'(t)$ y aplicar integración por partes para funciones reales, por lo que los detalles se dejan como ejercicio al lector.
Se deja como ejercicio al lector.
$\blacksquare$
Observación 33.3. Notemos que si $M=\sup\limits_{t\in[a,b]} |f(t)| < \infty$, entonces se cumple que: \begin{equation*} \left|\int_{a}^{b} f(t)\,dt\right| \leq \int_{a}^{b}\left| f(t) \right| \,dt \leq \int_{a}^{b} M \,dt = M(b-a). \end{equation*}
Ejemplo 33.1. Obtengamos la integral $\displaystyle\int_{0}^{2} f(t)\,dt$, donde: \begin{equation*} f(t)= \left\{ \begin{array}{lcc} (1+i)t& \text{si} & 0\leq t \leq 1, \\ \\ it^2 & \text{si} & 1\leq t \leq 2. \end{array} \right. \end{equation*}
Solución. De acuerdo con la proposición 33.1(3) y 33.1(4) tenemos que: \begin{align*} \int_{0}^{2} f(t)\,dt &= \int_{0}^{1} f(t)\,dt + \int_{1}^{2} f(t)\,dt\\ &= (1+i)\int_{0}^{1} t\,dt + i \int_{1}^{2} t^2\,dt\\ & = \frac{(1+i)(1^2-0^2)}{2} + \frac{i(2^3-1^3)}{3}\\ & = \frac{1}{2} + i\frac{17}{6}. \end{align*}
Definición 33.2. (Primitiva de una función híbrida.) Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, y $f: [a,b] \to \mathbb{C}$ una función híbrida continua en $[a,b]$. Si existe una función continua $F: [a,b] \to \mathbb{C}$ tal que: \begin{equation*} F'(t)=f(t), \quad \forall t\in(a,b), \end{equation*}se dice que $F$ es una primitiva de $f$.
Observación 33.4. Debe ser claro que si $f, F: [a,b] \to \mathbb{C}$ son dos funciones híbridas continuas en $[a,b]$, tales que: \begin{equation*} f(t)=u(t) +iv(t) \quad \text{y} \quad F(t)=U(t) +iV(t), \end{equation*}entonces $F$ es primitiva de $f$ si y solo si $U$ es primitiva de $u$ y $V$ es primitiva de $v$, es decir, las funciones reales $U(t)$ y $V(t)$ son tales que $U'(t)=u(t)$ y $V'(t)=v(t)$.
Veamos que para las funciones híbridas el segundo Teorema Fundamental del Cálculo (TFC), es válido.
Proposición 33.2. (Segundo TFC para funciones híbridas.) Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, y $f: [a,b] \to \mathbb{C}$ una función híbrida continua en $[a,b]$. Si $F: [a,b] \to \mathbb{C}$ es una primitiva de $f$, entonces: \begin{equation*} \int_{a}^{b} f(t)\,dt = \left. F(t) \right|_{a}^{b} = F(b) – F(a). \end{equation*}
Demostración. Dadas las hipótesis, sean $f(t)=u(t)+iv(t)$ y $F(t)=U(t)+iV(t)$. Dado que $F$ es una primitiva de $f$, entonces, por la observación 33.4 y considerando el segundo TFC para funciones reales, tenemos que: \begin{align*} \int_{a}^{b} f(t) dt & = \int_{a}^{b} u(t)\, dt + i \int_{a}^{b} \,v(t) dt\\ & = \left[U(b)-U(a)\right] + i \left[V(b)-V(a)\right]\\ & = \left[U(b)+iV(b)\right] -\left[U(a)+iV(a)\right]\\ & = F(b) – F(a). \end{align*}
En el caso en que $f$ es continua a trozos en $[a,b]$, podemos tomar por definición a la partición: \begin{equation*} P : a=t_0 < t_1 < \cdots < t_{n-1}<t_n=b, \end{equation*}del intervalo $[a,b]$, donde $t_1, \ldots, t_{n-1}$ son los puntos de discontinuidad de la función continua a trozos $f$ en $(a,b)$. Entonces por la proposición 33.1(4) tenemos que: \begin{align*} \int_{a}^{b} f(t) dt & = \displaystyle\sum_{k=1}^n \int_{t_k}^{t_{k-1}} f(t) \,dt\\ & = \displaystyle\sum_{k=1}^n \left[ F(t_k) – F(t_{k-1})\right]\\ & = F(t_n) – F(t_{0})\\ & = F(b) – F(a). \end{align*}
$\blacksquare$
Observación 33.5. Por simplicidad hemos enunciado los resultados anteriores para funciones híbridas continuas, sin embargo, tanto las definiciones anteriores como las propiedades de la proposición 33.1 y el segundo TFC, para funciones híbridas, siguen siendo válidos si $f$ y $g$ son funciones continuas a trozos en $[a,b]$, con una adecuada modificación de los enunciados considerando los resultados de la teoría de integración para funciones reales continuas a trozos y la definición 33.2.
Ejemplo 33.2. Sea $n\in\mathbb{Z}$. Consideremos a la función híbrida: \begin{equation*} f:\mathbb{R} \to \mathbb{C}, \quad f(t)=e^{int}. \end{equation*}Determinemos el valor de la integral $\displaystyle \int_{0}^{2\pi} f(t) \, dt$.
Solución. Es claro que $f$ es una función continua y diferenciable para todo $t\in\mathbb{R}$. Más aún, de acuerdo con la proposición 20.2 tenemos que: \begin{equation*} f(t) = e^{int} = \operatorname{cos}(nt) + i \operatorname{sen}(nt), \end{equation*}por lo que: \begin{equation*} f'(t) = in \left[\operatorname{cos}(nt) + i \operatorname{sen}(nt)\right] = ine^{int}, \end{equation*}entonces, la función $F(t)=\dfrac{e^{int}}{in}$ es una primitiva de $f$.
Para $n\neq 0$, por las proposiciones 20.2 y 33.3, tenemos que: \begin{equation*} \displaystyle \int_{0}^{2\pi} e^{int} \, dt = \left. \dfrac{e^{int}}{in} \right|_{0}^{2\pi} = \frac{e^{i2n\pi}-e^0}{in} = \frac{1-1}{in} = 0. \end{equation*}
Mientras que, para $n=0$ tenemos a la función constante $f(t)=1$, entonces, para todo $n\in\mathbb{Z}$ tenemos que: \begin{equation*} \displaystyle \int_{0}^{2\pi} e^{int} \, dt= \left\{ \begin{array}{lcc} 0 & \text{si} & n \neq 0, \\ \\ 2\pi & \text{si} & n=0. \end{array} \right. \end{equation*}
Ejemplo 33.3. Evaluemos a la integral $\displaystyle \int_{0}^{2\pi} \operatorname{cos}^2(t) \, dt$.
Solución. De acuerdo con la definición 22.1 tenemos que: \begin{equation*} \operatorname{cos}^2(t) = \left(\frac{e^{it}+e^{-it}}{2}\right)^2 = \frac{1}{4}\left(e^{i2t} + e^{-i2t} + 2\right). \end{equation*}
De la proposición 33.1 y el ejemplo anterior se sigue que: \begin{align*} \int_{0}^{2\pi} \operatorname{cos}^2(t) \, dt &= \int_{0}^{2\pi} \left[\frac{1}{4}\left(e^{i2t} + e^{-i2t} + 2\right)\right] \, dt\\ & = \frac{1}{4} \left[ \int_{0}^{2\pi} e^{i2t} \, dt + \int_{0}^{2\pi} e^{-i2t} \,dt + \int_{0}^{2\pi} 2 dt\right]\\ & = \frac{1}{4} \left[ 0 + 0 + 4\pi \right]\\ & = \pi. \end{align*}
Ejemplo 33.4. Determinemos una primitiva de la función $f(t)$ dada en el ejemplo 33.1. y utilicemos la proposición 33.3 para verificar el resultado del ejemplo 33.1.
Es claro que la funciones $f_1(t) = (1+i)t$ y $f_2(t) = it^2$ son funciones continuas para todo $t\in\mathbb{R}$, por lo que integrando a cada una de dichas funciones tenemos que: \begin{equation*} F(t)= \left\{ \begin{array}{lcc} \dfrac{(1+i)t^2}{2} + c_1& \text{si} & 0\leq t \leq 1, \\ \\ \dfrac{it^3}{3} + c_2& \text{si} & 1\leq t \leq 2. \end{array} \right. \end{equation*}determina una expresión general de las primitivas de $f$, donde $c_1$ y $c_2$ son dos constantes complejas arbitrarias.
Si $c_1 =0$, al evaluar a $F$ en $t=1$ tenemos que: \begin{equation*} \dfrac{1+i}{2} =\dfrac{i}{3} + c_2 \quad \Longrightarrow \quad c_2 = \dfrac{1}{2} + \dfrac{i}{6}. \end{equation*}
Entonces: \begin{equation*} F(t)= \left\{ \begin{array}{lcc} \dfrac{(1+i)t^2}{2} & \text{si} & 0\leq t \leq 1, \\ \\ \dfrac{it^3}{3} + \dfrac{1}{2} + \dfrac{i}{6} & \text{si} & 1\leq t \leq 2. \end{array} \right. \end{equation*}es una primitiva de $f$ en el intervalo $[0,2]$.
De acuerdo con la proposición 33.3 tenemos que: \begin{equation*} \int_{0}^{2} f(t)\,dt = F(2) – F(0) = \frac{i(2^3)}{3} + \dfrac{1}{2} + \dfrac{i}{6} – 0 = \dfrac{1}{2} + i\dfrac{17}{6}, \end{equation*}lo cual coincide con el resultado del ejemplo 33.1.
Solución. Sea $f(t) = (t-i)^3$. Desarrollando tenemos que: \begin{equation*} f(t)=t^3-3t+i(-3t^2+1), \end{equation*}de donde $u(t)=t^3-3t$ y $v(t)=-3t^2+1$, las cuales son funciones continuas en $[0,1]$, por lo que podemos calcular la integral de cada función. Entonces: \begin{equation*} \int_{0}^{1} (t^3-3t) dt = \left.\left(\frac{t^4}{4}-\frac{3t^2}{2}\right)\right|_{0}^{1} = -\frac{5}{4}, \end{equation*} \begin{equation*} \int_{0}^{1} (-3t^2+1) dt = \left.\left(-t^3+t\right)\right|_{0}^{1} = 0, \end{equation*}por lo que: \begin{equation*} \int_{0}^{1} (t-i)^3 dt = \int_{0}^{1} (t^3-3t) dt + i \int_{0}^{1} (-3t^2+1) dt = -\frac{5}{4}. \end{equation*}
Solución. Sea $f(t) = e^{t+it}$. De acuerdo con la proposición 20.2 tenemos que: \begin{equation*} f(t)=e^t\operatorname{cos}(t)+ie^t\operatorname{sen}(t), \end{equation*}de donde $u(t)=e^t\operatorname{cos}(t)$ y $v(t)=e^t\operatorname{sen}(t)$, las cuales son funciones continuas en $\left[0,\frac{\pi}{2}\right]$, por lo que podemos calcular la integral de cada función. Integrando por partes tenemos que: \begin{equation*} \int e^t\operatorname{cos}(t) dt = e^{t}\left[\operatorname{cos}(t) + \operatorname{sen}(t)\right] – \int e^t\operatorname{cos}(t) dt +c, \end{equation*}de donde: \begin{equation*} \int e^t\operatorname{cos}(t) dt = \frac{1}{2} e^{t}\left[\operatorname{cos}(t) + \operatorname{sen}(t)\right] +c. \end{equation*}
Observación 33.6. No es difícil verificar que dada una función híbrida continua $f:[a,b]\to\mathbb{C}$, si $F$ y $G$ son dos primitivas de $f$, entonces $F$ y $G$ solo difieren por una constante compleja, en $[a,b]$. Considerando esto y la proposición 33.3, podemos escribir: \begin{equation*} \int_{a}^{b} f(t) \, dt = F(t) + c, \end{equation*}con $c$ una constante compleja, para denotar a cualquier primitiva de $f$.
Ejemplo 33.7. Sea $z\in\mathbb{C}\setminus\{0\}$. Consideremos a la función híbrida $f(t)=e^{zt}$, con $t\in\mathbb{R}$, entonces: \begin{equation*} \int_{a}^{b} e^{zt} \, dt = \frac{1}{z} e^{zt} + c, \end{equation*}con $c\in\mathbb{C}$ constante, ya que para $F(t) = \dfrac{1}{z} e^{zt}$, por la proposición 32.1(1) y el ejemplo 32.1, se cumple que: \begin{equation*} F'(t) = \frac{d}{dt} \dfrac{1}{z} e^{zt} = \dfrac{1}{z} \frac{d}{dt} e^{zt} = \dfrac{1}{z} z e^{zt} = e^{zt}, \quad z\neq 0. \end{equation*}
Tarea moral
Completa la demostración de la proposición 33.1.
Sean $a,b\in\mathbb{R}\setminus\{0\}$ y sea $f(t)=e^{at}\operatorname{cos}(bt)$. Determina una expresión general para la primitiva de $f$ de las siguientes formas. a) Integra por partes dos veces y obtén la solución como en Cálculo. b) Expresa $f$ usando la exponencial compleja y utiliza los resultados de esta entrada.
Evalúa las siguientes integrales utilizando los resultados de esta entrada, es decir, sin utilizar integración por partes. a) $\displaystyle \int_{0}^{2\pi} e^{3t} \operatorname{cos}^2(2t) dt$. b) $\displaystyle \int_{0}^{\pi} e^{t} \operatorname{cos}(3t) \operatorname{sen}(4t)dt$.
Sean $[a,b]\subset{\mathbb{R}}$ un intervalo cerrado, con $a<b$, y $f: [a,b] \to \mathbb{C}$ una función híbrida continua tal que $|f(t)|\leq M$ para todo $t\in[a,b]$, con $M>0$. Prueba que si: \begin{equation*} \left|\displaystyle \int_{a}^{b} f(t)\, dt\right| = M(b-1), \end{equation*}entonces $f(t)=c$, con $c\in\mathbb{C}$ una constante tal que $|c|=M$.
Evalúa las siguientes integrales. a) $\displaystyle \int_{0}^{2\pi} e^{i3t} dt$. b) $\displaystyle \int_{1}^{2} \operatorname{Log}(it)dt$. c) $\displaystyle \int_{-1}^{1} \dfrac{t+i}{t-i} dt$. d) $\displaystyle \int_{-1}^{0} \operatorname{sen}(it)dt$. e) $\displaystyle \int_{1}^{2} t^{i} dt$, considerando la rama principal de $t^i$. f) $\displaystyle \int_{-1}^{1}(2i+3+it)^2 \, dt$.
Evalúa la integral $\displaystyle \int_{-1}^{1} f(t) \, dt$, donde: a) $f(t)= \left\{ \begin{array}{lcc} (3+2i)t& \text{si} & -1\leq t \leq 0, \\ \\ it^2 & \text{si} & 0\leq t \leq 1. \end{array} \right.$ b) $f(t)= \left\{ \begin{array}{lcc} e^{i\pi t}& \text{si} & -1\leq t \leq 0, \\ \\ t & \text{si} & 0\leq t \leq 1. \end{array} \right.$
Muestra que si $\operatorname{Re}(z)>0$, entonces $\displaystyle \int_{0}^{\infty} e^{-zt} \, dt = \dfrac{1}{z}$.
Más adelante…
En esta entrada hemos definido la integral compleja para una función híbrida y probamos algunas de sus propiedades más importantes que resultan de gran utilidad al resolver ciertos problemas. Es importante mencionar que aunque para el caso de las derivadas y las integrales de funciones híbridas, los resultados parecen ser los mismos que para funciones reales, ya que podemos separar a una función híbrida en su parte real e imaginaria, la aplicación de estos resultados es mucha, en particular para el cálculo de integrales reales a través del uso las propiedades de las funciones complejas como la exponencial y las trigonométricas. Veremos más a detalle estas aplicaciones en la última unidad del curso, aunque muestra de esta utilidad se ve en el ejemplo 33.3.
En la siguiente entrada definiremos lo que es una integral de contorno, que como veremos nos permite hablar de la integrabilidad de una función compleja de variable compleja y aunque dicha definición resulta familiar a la de una integral de línea, veremos que a través de estas integrales obtendremos algunos resultados que serán de suma importancia para la teoría de la variable compleja.
A lo largo de la segunda unidad abordamos los conceptos de diferenciabilidad y analicidad para una función compleja. En esta cuarta unidad nuestro objetivo será estudiar el concepto de integración para el caso complejo. Como veremos, muchas de las definiciones y propiedades de las integrales de funciones complejas analíticas estarán sustentadas en muchos resultados de nuestros cursos de Cálculo.
En esta entrada algunas definiciones básicas que nos serán de utilidad a o largo de la unidad para definir la integral de una función compleja.
En la segunda unidad del curso definimos de manera formal el concepto de función compleja de variable compleja y mencionamos que es posible trabajar también con funciones reales de variable compleja o funciones complejas de variable real, en esta unidad éstas últimas tomarán un papel importante.
Definición 32.1. (Funciones híbridas.) Se llama función híbrida a:
una función real de variable compleja, es decir, $f : S\subset\mathbb{C} \to \mathbb{R}$,
una función compleja de variable real, es decir, $f : S \subset\mathbb{R} \to \mathbb{C}$.
Observación 32.1. De forma natural, es claro que para ambos tipos de funciones híbridas hay una noción de continuidad y diferenciabilidad. Sin embargo, solo nos centraremos en definir dichos conceptos para las funciones complejas de variable real, ya que la diferenciabilidad del primer tipo de función híbrida resulta poco interesante, pues una función $f:U \to \mathbb{R}$, con $U\subset\mathbb{C}$ abierto, se puede pensar como una función compleja cuya parte imaginaria es cero y en tal caso, por la proposición 19.3, tendríamos que si $f$ es diferenciable, entonces $f$ debe ser constante.
Por lo tanto, a partir de ahora, al referirnos a una función híbrida asumiremos que estamos considerando a una función compleja de variable real, a menos que se especifique otra cosa.
Observación 32.2. Dado que $\mathbb{R}\subset\mathbb{C}$, entonces podemos pensar a una función híbrida $f : S \subset\mathbb{R} \to \mathbb{C}$ como una función compleja de variable compleja, cuya parte imaginaria es cero, es decir, $z=t \in \mathbb{R}$. Entonces, por la proposición 12.1, podemos escribir a $f$ como: \begin{equation*} f(t) = u(t) + iv(t), \quad \forall t\in S. \end{equation*}
Definición 32.2. (Continuidad de una función híbrida.) Sean $(a, b)\subset\mathbb{R}$ un intervalo abierto, $a<b$, y $f : (a, b) \to \mathbb{C}$ una función híbrida. Se dice que $f$ es continua en $t_0 \in (a,b)$ si: \begin{equation*} \lim_{t \to t_0} f(t) = f(t_0). \end{equation*}
Observación 32.3. De acuerdo con el ejercicio 2 de la entrada 15, tenemos que $f(t) = u(t) + iv(t)$ es una función continua en $(a, b)$ si y solo si las funciones reales $u(t)$ y $v(t)$ son continuas en $(a, b)$.
Definición 32.3. (Continuidad de una función híbrida a trozos.) Sean $[a, b]\subset\mathbb{R}$ un intervalo cerrado, $a<b$, y $f : [a, b] \to \mathbb{C}$ una función híbrida. Se dice que $f$ es continua a trazos si existe una partición: \begin{equation*} P : t_1 < \cdots < t_{n-1}, \end{equation*} del intervalo abierto $(a,b)$ tal que:
$f(t)$ es continua en todo punto en $(a, b)\setminus\{t_1, t_2, \ldots, t_{n-1}\}$ y existen los límites laterales de $f$ en los extremos del intervalo, es decir: \begin{equation*} \lim_{t \to a^+} f(t) \quad \text{y} \quad \lim_{t \to b^-} f(t). \end{equation*}
Existen y son finitos los límites laterales: \begin{equation*} \lim_{t \to t_k^+} f(t) \quad \text{y} \quad \lim_{t \to t_k^-} f(t), \end{equation*}para todo $k=1, 2,\ldots, n-1$.
Definición 32.4. (Diferenciabilidad de una función híbrida.) Sean $(a, b)\subset\mathbb{R}$ un intervalo abierto, $a<b$, y $f : (a, b) \to \mathbb{C}$ una función híbrida. Se dice que $f$ es diferenciable en $t_0 \in (a,b)$, si es diferenciable en el sentido real, es decir, si existe el límite: \begin{equation*} \dfrac{d}{dt} f(t_0) = f'(t_0) = \lim_{t \to t_0} \frac{f(t) – f(t_0)}{t-t_0} = \lim_{h \to 0} \frac{f(t_0 + h) – f(t_0)}{h}, \end{equation*}en tal caso se dice que $f'(t_0)$ es la derivada de $f$ en $t_0$.
Observación 32.4. Es posible extender el concepto de diferenciabilidad, de una función híbrida $f$, para un intervalo real cerrado $[a, b]\subset\mathbb{R}$ mediante el concepto de límites laterales, es decir, garantizando la existencia de la derivada en $(a,b)$, de acuerdo con la definición 32.4, y de las derivadas laterales de la función $f$, en los puntos extremos del intervalo $[a,b]$, las cuales están dados por: \begin{equation*} f'(a) = \lim_{t \to a^{+}} \frac{f(t) – f(a)}{t-a} \quad \text{y} \quad f'(b) = \lim_{t \to b^{-}} \frac{f(t) – f(b)}{t-b}. \tag{32.1} \end{equation*}
Observación 32.5. Sea $f(t) = u(t) + iv(t)$, una función híbrida definida en $(a, b)$. De acuerdo con la proposicición 14.2, es claro que para todo $t\in (a, b)$, se tiene que $f'(t)$ existe si y solo si $u'(t)$ y $v'(t)$ existen, y en tal caso: \begin{equation*} f'(t) = u'(t) + i v'(t). \end{equation*}
Las funciones híbridas satisfacen muchas propiedades sobre derivadas similares a las de las funciones reales, las cuales pueden verificarse fácilmente separando a la función híbrida en su parte real e imaginaria.
Proposición 32.1. (Reglas de derivación para funciones híbridas.) Sean $(a, b)\subset\mathbb{R}$ un intervalo abierto, $a<b$, y $f , g: (a, b) \to \mathbb{C}$ dos funciones híbridas. Entonces para todo $t\in (a,b)$ y todo $\alpha, \beta \in\mathbb{C}$ se cumple que:
Regla de la cadena. Si $h:(c,d) \to (a,b)$ es una función diferenciable, entonces: \begin{equation*} \left(f \circ h\right)'(t) = f’\left(h(t)\right) h'(t). \end{equation*}
Demostración.Se deja como ejercicio al lector.
Ejemplo 32.1. Sea $z\in\mathbb{C}$. Veamos que para $f(t)=e^{zt}$ se cumple que $f'(t)=ze^{zt}$.
Por lo que $f$ es una función híbrida diferenciable para todo $t\in\mathbb{R}$.
Observación 32.6. En la regla de la cadena de la proposición anterior hemos considerado composiciones de funciones de la forma: \begin{equation*} \mathbb{R} \to \mathbb{R} \to \mathbb{C}. \end{equation*}
Sin embargo, es posible establecer una regla de la cadena para composiciones de la forma: \begin{equation*} \mathbb{R} \to \mathbb{C} \to \mathbb{C}. \end{equation*}
Para ello recordemos primeramente el siguiente resultado visto en nuestros cursos de Cálculo.
Teorema 32.1. (Regla de la cadena para funciones reales de varias variables.) Sean $V \subset \mathbb{R}^n$, $U\subset\mathbb{R}^m$ dos conjuntos abiertos, $\gamma : V \to \mathbb{R}^m$ y $f : U \to \mathbb{R}^k$ dos funciones tales que $\gamma\left(V\right) \subset U$. Si $\gamma$ es diferenciable en $t_0 \in V$ y $f$ es diferenciable en $z_0 = \gamma(t_0) \in U$, entonces $f \circ \gamma$ es diferenciable en $t_0$ y se cumple que: \begin{equation*} D \left(f \circ \gamma\right)(t_0) = D f \left(z_0\right) \circ D \gamma\left(t_0\right), \end{equation*}o equivalentemente: \begin{equation*} J \left(f \circ \gamma\right)(t_0) = J f \left(z_0\right) J\gamma\left(t_0\right), \end{equation*}donde $J f(z_0)$ y $J \gamma(t_0)$ son las matrices Jacobianas, de dimensiones $k \times m$ y $m \times n$, respectivamente.
Considerando el resultado anterior tenemos la siguiente:
Proposición 32.2. (Regla de la cadena para la composición de funciones complejas y funciones híbridas.) Sean $(a, b)\subset\mathbb{R}$ un intervalo real abierto, $a<b$, y $D\subset\mathbb{C}$ un dominio. Si $\gamma:(a, b) \to D$ es una función diferenciable en $t_0 \in (a, b)$ y $f : D \to \mathbb{C}$ es una función analítica en $z_0 = \gamma(t_0) = x_0 + i y_0 \in D$, entonces la función $\varphi=f\circ \gamma$ es diferenciable en $t_0$ y su derivada es: \begin{equation*} \varphi'(t_0) = f'(\gamma(t_0)) \gamma'(t_0). \tag{32.2} \end{equation*}
Debe ser claro que en la igualdad anterior, el término de la derecha corresponde con el producto de los números complejos $f'(\gamma(t_0))$ y $\gamma'(t_0)$.
Demostración. Dadas las hipótesis, sean $f(z) = u(x, y) + iv(x, y)$ y $\gamma(t) = x(t) + i y(t)$.
Como $f$ es analítica en $z_0 \in D$, por el teorema 18.3, tenemos que $f$ es dierenciable en el sentido real en $z_0$ y se satisfacen las ecuaciones de C-R en dicho punto. Entonces, de la regla de la cadena para funciones reales de varias variables se sigue que $\varphi = f\circ \gamma$ es diferenciable en $z_0$ y se cumple que: \begin{equation*} \varphi'(t_0) = J \left(f \circ \gamma\right)(t_0) = J f \left(z_0\right) J\gamma\left(t_0\right). \end{equation*}
Dado que se cumplen las ecuaciones de C-R en $z_0 \in D$, entonces, por el ejercicio 3 de la entrada 12, tenemos que: \begin{align*} J f \left(z_0\right) & = \begin{pmatrix} u_x(z_0) & u_y(z_0)\\ v_x(z_0) & v_y(z_0) \end{pmatrix}\\ & = \begin{pmatrix} u_x(\gamma(t_0)) & -v_x(\gamma(t_0))\\ v_x(\gamma(t_0)) & u_x(\gamma(t_0)) \end{pmatrix}\\ & = u_x(\gamma(t_0)) + i v_x(\gamma(t_0))\\ & = f'(\gamma(t_0)), \end{align*}\begin{equation*} J \gamma\left(t_0\right) = \begin{pmatrix} x'(t_0)\\ y'(t_0) \end{pmatrix} = x'(t_0) + i y'(t_0) = \gamma'(t_0), \end{equation*}por lo que: \begin{equation*} \varphi'(t_0) = f'(\gamma(t_0)) \gamma'(t_0). \end{equation*}
$\blacksquare$
A partir de ahora, nos centraremos en las funciones híbridas que son continuas, ya que como veremos nos serán de gran utilidad al definir el concepto de integral desde la perspectiva compleja. Para hacer clara la notación, utilizaremos letras griegas para hablar de funciones híbridas y reservaremos las letras usuales $f$ y $g$ para hablar de funciones complejas de variable compleja.
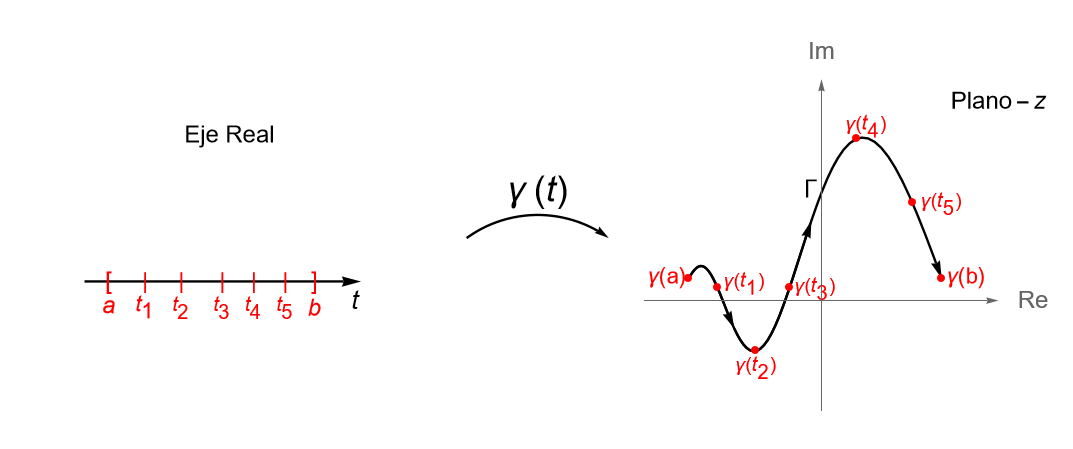
Definición 32.5. (Trayectoria y curva en $\mathbb{C}$.) Sea $[a, b]\subset\mathbb{R}$, con $a<b$, un intervalo real cerrado. A toda función continua $\gamma: [a,b] \to \mathbb{C}$ se le llama una trayectoria en el plano complejo $\mathbb{C}$. A la imagen de $[a, b]$ bajo $\gamma$, es decir, el conjunto: \begin{equation*} \Gamma := \gamma\left([a,b]\right) = \left \{\gamma(t) : t\in [a,b] \right\} \subset \mathbb{C}, \end{equation*} se le llama la imagen de la trayectoria o la curva descrita por $\gamma$.
Observación 32.7. Si consideramos a $z=x+iy \in\mathbb{C}$, tiene sentido adoptar la notación $z(t) = x(t) + iy(t)$ para referirnos a una trayectoria, cuya curva está determinada por cada valor de $t\in [a,b]$, la cual decimos que está parametrizada por las funciones reales continuas $x(t)$ y $y(t)$, definidas en $[a,b]$, a las que llamaremos funciones paramétricas o funciones componentes de $z(t)$. Así, una curva $\gamma$ en $\mathbb{C}$ puede parametrizarse mediante sus funciones componentes como: \begin{align*} \gamma(t) &= (x(t), y(t))\\ &= x(t) + iy(t) \in \mathbb{C}, \quad \forall t\in [a,b]. \tag{32.3} \end{align*}
Observación 32.8. El uso de la notación $\Gamma$ para referirnos a la curva asociada a la trayectoria $\gamma$ se usará únicamente cuando sea necesario especificar al conjunto de manera explícita. En general, cuando hablemos de $\gamma$ se sobrentenderá que nos referimos a la trayectoria (función híbrida continua) o a su curva asociada (imagen de $\gamma$), por lo que usaremos de forma indistinta la notación y aunque escribamos a $\gamma$ como en (32.3) no debemos confundirnos entre una curva $\Gamma$ y su parametrización $\gamma$. Es común usar alguna letra griega para denotar a alguna curva.
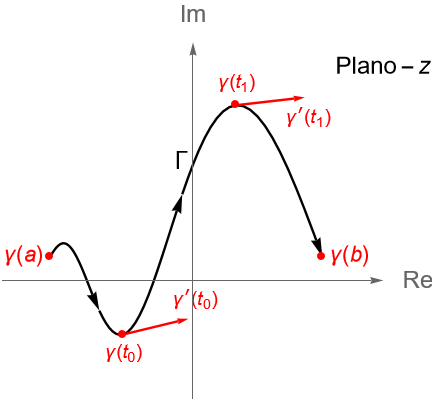
Definición 32.6. (Curva cerrada, orientación, curva simple y curva cerrada simple.) Sea $\gamma: [a,b] \to \mathbb{C}$, con $a<b$, una trayectoria dada por $\gamma(t) = x(t) + iy(t) $, para $t\in [a, b]$. Al punto $\gamma(a) = (x(a), y(a))$ se le llama el {\bf origen} de la curva $\gamma$, mientras que al punto $\gamma(b) = (x(b), y(b))$ se le llama el extremo o final de $\gamma$. Para denotar este sentido en la curva, de manera gráfica se suelen utilizar algunas flechas sobre la gráfica, figura 110, indicando que la curva inicia en $\gamma(a)$ y termina en $\gamma(b)$. Si el origen y el extremo de $\gamma$ son el mismo punto, es decir $\gamma(a) = \gamma(b)$, se dice que la curva es cerrada.
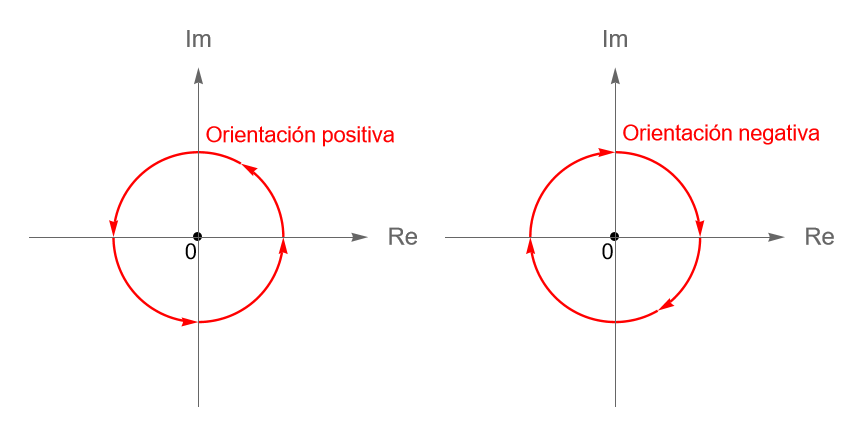
Por otra parte, se dice que el sentido de una curva cerrada o de algún arco de curva tiene orientación o dirección positiva si se recorre en el sentido contrario al de las manecillas del reloj, figura 111, y en caso contrario se dice que tiene orientación o dirección negativa.
Por último, a una curva $\gamma$ que no se corte asimisma, excepto quizás en sus extremos, es decir, $\gamma(t_1) \neq \gamma(t_2)$ si $t_1,t_2\in(a,b)$ y $t_1\neq t_2$, se le llama una curva simple. Si la curva $\gamma$ es cerrada y no se corte asimisma, excepto en sus extremos, se le llama una curva cerrada simple o una curva de Jordan.
Figura 110: Gráfica de la imagen de una curva $\gamma$ definida sobre el intervalo $[a, b]$ y con valores en el plano complejo $\mathbb{C}$.
Figura 111: Gráfica de la orientación positiva y negativa de una curva cerrada en el plano complejo $\mathbb{C}$.
Observación 32.9. Debe ser claro que una curva es simple o cerrada simple, si la función $\gamma$ que la describe es una función inyectiva en $[a,b]$, es decir, su curva asociada no se corta asimisma en más de un punto, correspondiente con sus extremos $\gamma(a) = \gamma(b)$, como podemos ver en el ejemplo 32.3. Aunque no necesariamente una trayectoria debe ser una función inyectiva, por lo que puede suceder que su curva asociada se corte asimisma en más de un punto, incluyendo los extremos, es decir, que la curva se cerrada, pero no simple, como podemos ver en el ejemplo 32.4.
Definición 32.7. (Curva de clase $C^1$ o suave.) Sea $\gamma : [a, b] \to \mathbb{C}$, con $a<b$, una trayectoria. Se dice que la curva asociada a $\gamma$ es continuamente diferenciable, de clase $C^1$ o suave, lo cual se denota como $\gamma \in C^1\left([a, b]\right)$, si:
$\gamma$ es diferenciable en $[a, b]$, de acuerdo con la observación 32.4.
$\gamma’$ es continua en $[a, b]$, es decir, $\gamma’$ es continua en $(a, b)$, y existen los límites laterales de $\gamma’$ en los extremos del intervalo, es decir: \begin{equation*} \lim_{t \to a^+} \gamma'(t) \quad \text{y} \quad \lim_{t \to b^-} \gamma'(t). \end{equation*}
Observación 32.10. Es importante mencionar que en algunos textos, el término «suave» suele utilizarse para las curvas tales que $\gamma'(t)$ existe y $\gamma'(t) \neq 0$ para todo $t\in[a,b]$, definición 32.8. Sin embargo, para los fines del curso, dicho término se utilizará para hablar de una trayectoria $\gamma(t)$ de clase $C^1([a,b])$.
Definición 32.8. (Curva regular.) Sea $\gamma: [a,b] \to \mathbb{C}$ una trayectoria, con $a<b$. Se dice que $\gamma$ es una curva regular si:
$\gamma'(t)$ existe y es continua en $[a,b]$.
$\gamma'(t) \neq 0$ para todo $t\in(a,b)$.
Observación 32.11. Para una curva $\gamma$, definida en un intervalo $[a,b]$, tal que $\gamma'(t) \neq 0$ para algún $t\in[a,b]$, debe ser claro que su derivada tiene una interpretación geométrica correspondiente con el vector tangente a la curva $\gamma$ en el punto $\gamma(t)$.
Figura 112: Gráfica de dos vectores tangentes a una curva simple $\gamma$ en los puntos $\gamma(t_0)$ y $\gamma(t_1)$, para $t_0, t_1 \in [a,b]$ tales que $\gamma'(t_0)\neq 0$ y $\gamma(t_1)\neq 0$.
Analicemos los siguientes ejemplos de curvas en el plano complejo $\mathbb{C}$ con las que ya estamos familiarizados.
Ejemplo 32.2. (Segmentos de recta.) Sean $z_1,z_2\in\mathbb{C}$ con $z_1\neq z_2$. Definimos al segmento de recta con origen $z_1$ y final $z_2$ como la trayectoria: \begin{equation*} [z_1, z_2] : [0,1] \to \mathbb{C}, \quad [z_1, z_2](t) := z_1 + (z_2-z_1)t, \quad \forall t\in[0,1]. \end{equation*}
Si $z_1 = a_1 + ib_1$ y $z_2 = a_2 + ib_2$, entonces una parametrización de dicho segmento es $[z_1, z_2](t) = x(t) + iy(t)$, donde: \begin{equation*} x(t):=(a_2-a_1)t + a_1, \quad y(t):=(b_2-b_1)t + b_1, \quad t\in[0,1]. \end{equation*}
Notemos que dicha curva es regular ya que $x'(t) = a_2 – a_1 \neq 0$ y $y'(t) = b_2 – b_1 \neq 0$ para todo $ t\in[0,1]$.
Es claro que hemos hecho un abuso en la notación, por lo que es importante no confundir la notación utilizada para la trayectoria $[z,w]$ con la de un intervalo real cerrado.
Observación 32.12. Es importante enfatizar en el hecho de que una trayectoria puede tener distintas parametrizaciones, pero la misma curva asociada. Por lo que, siempre que sea necesario, se debe especificar la parametrización de la curva con la que se está trabajando.
Ejemplo 32.3. Consideremos al segmento $[0,1]$. Es claro que la imagen de dicha curva es un segmento de recta en el plano. Sin embargo, notemos que dicha curva puede parametrizarse como: \begin{align*} \gamma_1(t) = t, \quad 0\leq t \leq 1,\\ \gamma_2(t) = t^2, \quad 0\leq t \leq 1,\\ \gamma_3(t) = \frac{t}{2}, \quad 0\leq t \leq 2. \end{align*}
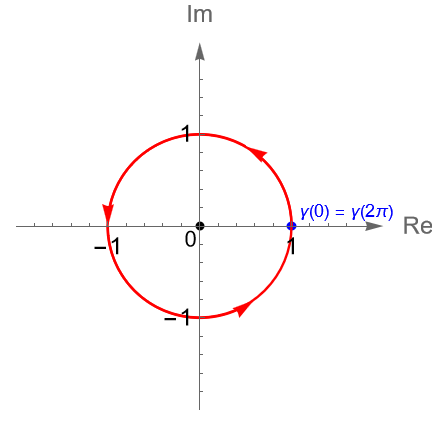
Ejemplo 32.4. (Circunferencias.) Un ejemplo sencillo de una curva cerrada simple es la circunferencia unitaria $C(0,1)$, con orientación positiva, figura 113, cuya parametrización está dada por: \begin{equation*} \gamma(t) = e^{it} = \operatorname{cos}(t) + i \operatorname{sen}(t), \quad 0\leq t \leq 2\pi. \end{equation*}
Esta curva cerrada es simple y tiene como punto inicial a $\gamma(0) =1$ y punto final a $\gamma(2\pi) =1$.
Figura 113: Gráfica de la circunferencia unitaria orientada positivamente.
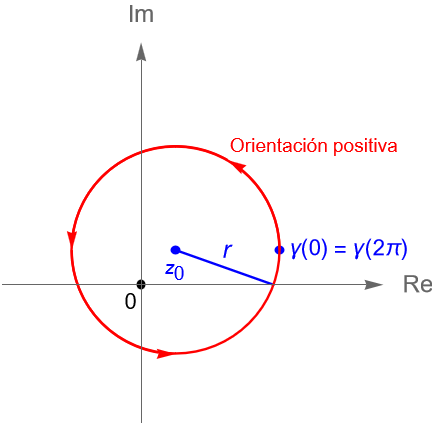
En general, una circunferencia $C(z_0,r)$, con $r>0$ y $z_0\in\mathbb{C}$ fijo, es un ejemplo de una curva cerrada simple en el plano complejo.
Sean $z_0=a+ib\in\mathbb{C}$ fijo y $r>0$. El conjunto: \begin{equation*} C(z_0,r) = \left\{ z = a+r\operatorname{cos}(t) + \left[ b+r\operatorname{sen}(t) \right] \in \mathbb{C} : t\in[0,2\pi]\right\}, \end{equation*}corresponde con la imagen de la trayectoria $ \gamma(t) = z_0 + re^{it}$, con $t\in[0, 2\pi]$, que describe una circunferencia de radio $r>0$ y centro $z_0 = a+ib$, la cual es recorrida en sentido positivo, figura 114, y tiene como parametrización: \begin{align*} \gamma(t) & = z_0 + re^{it}\\ & = a +ib + r\left[\operatorname{cos}(t) + i\operatorname{sen}(t)\right]\\ & = a + r\operatorname{cos}(t) + i \left[b +\operatorname{sen}(t)\right], \quad t\in[0, 2\pi], \end{align*}es decir, $\gamma(t) = x(t) + iy(t)$, donde: \begin{equation*} x(t) = a + r\operatorname{cos}(t), \quad y(t) = b +\operatorname{sen}(t), \quad t\in[0, 2\pi]. \end{equation*}
Esta curva cerrada tiene como punto inicial y final a: \begin{equation*} z_0 + r = \gamma(0) = \gamma(2\pi). \end{equation*}
No es difícil verificar que una circunferencia también es una curva regular, por lo que se deja como ejercicio al lector.
Figura 114: Gráfica de una circunferencia de radio $r>0$ y centro $z_0$, orientada positivamente.
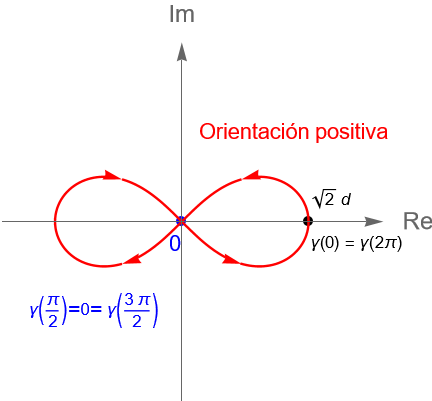
Ejemplo 32.5. Consideremos a la lemniscata, la cual es una curva en el plano $\mathbb{R}^2$ descrita por la ecuación polar: \begin{equation*} r^2 = 2d^2 \operatorname{cos}(2\theta), \end{equation*}donde $d>0$ es una constante.
Dado que para $\theta \in \left(\dfrac{\pi}{4}, \dfrac{3 \pi}{4}\right) \bigcup \left(-\dfrac{3\pi}{4}, -\dfrac{\pi}{4}\right)$ se tiene que $\operatorname{cos}(2\theta)<0$, entonces para dichos valores de $\theta$ la curva no tiene puntos en el plano.
Una posible parametrización para dicha curva, en el plano complejo $\mathbb{C}$, es $\gamma(t) = x(t)+iy(t)$, donde: \begin{equation*} x(t) := \frac{d\sqrt{2}\operatorname{cos}(t)}{1+\operatorname{sen}^2(t)}, \quad y(t) := \frac{d\sqrt{2}\operatorname{sen}(t)\operatorname{cos}(t)}{1+\operatorname{sen}^2(t)}, \quad t\in[0,2\pi]. \end{equation*}
Bajo esta parametrización la curva $\gamma$ tiene una orientación positiva, figura 115. Más aún, como: \begin{equation*} \gamma(0) = d\sqrt{2} =\gamma(2\pi), \end{equation*}entonces dicha curva es cerrada. Sin embargo, la lemniscata no es una curva simple ya que: \begin{equation*} \gamma\left(\dfrac{\pi}{2}\right) = 0 = \gamma\left(\dfrac{3\pi}{2}\right), \end{equation*}con $\dfrac{\pi}{2}, \dfrac{3\pi}{2} \in [0, 2\pi]$ y $\dfrac{\pi}{2} \neq \dfrac{3\pi}{2}$, es decir, $\gamma$ no es inyectiva.
Figura 115: Gráfica de una lemniscata, con $d>0$ constante, la cual es una curva cerrada, pero no simple.
Definición 32.9. Sea $\gamma : [a,b] \to \mathbb{C}$ una trayectoria y $D \subset \mathbb{C}$ un dominio. Si la curva descrita por $\gamma$ está contenida en $D$, es decir, si la imagen de $\gamma$ es tal que: \begin{equation*} \{ \gamma(t) : t\in [a, b]\} \subset D, \end{equation*}se dice que $\gamma$ es una curva en $D$, lo cual se denota como $\gamma : [a,b] \to D$.
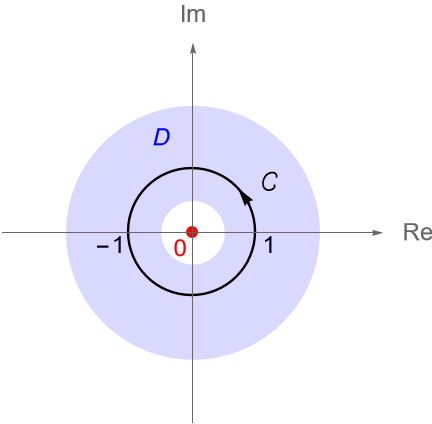
Ejemplo 32.6. El circulo unitario $\gamma(t) = \operatorname{cos}(t) + i\operatorname{sen}(t)$, con $0 \leq t \leq 2\pi$, figura 116, es una curva en el dominio: \begin{equation*} D = \left\{z \in \mathbb{C} : \frac{1}{2} \leq |z| \leq 2 \right\}. \end{equation*}
Figura 116: Circunferencia unitaria en el dominio $D$.
Como mencionamos antes, la continuidad de las funciones híbridas resulta fundamental para definir los conceptos básicos para la teoría de la integral compleja.
Definición 32.10 (Curva de clase $C^1$ o suave a trozos.) Una trayectoria $\gamma: [a,b] \to \mathbb{C}$ es llamada continuamente diferenciable por partes o a trozos, de clase $C^1$ por partes o a trozos o suave por partes o a trozos si existe una partición: \begin{equation*} P : a=t_0 < t_1 < \cdots < t_{n-1}<t_n=b, \end{equation*}del intervalo $[a,b]$ tal que la restricción de $\gamma$ a cada subintervalo $[t_{k-1}, t_k]$, con $1\leq k \leq n$, es de clase $C^1$ o suave, definición 32.7.
En otras palabras, $\gamma$ es continua en $[a,b]$ y para $1\leq k \leq n$:
$\gamma'(t)$ existe para todo $t\in(t_{k-1}, t_k)$ y en los puntos extremos $t_{k-1}$ y $t_k$ existen los límites laterales (32.1).
$\gamma'(t)$ es continua en cada intervalo $[t_{k-1}, t_k]$.
Observación 32.13. Debe ser claro que si $\gamma’$ está definida en $[a,b]$, entonces $\gamma’$ puede tener discontinuidades de salto en algunos $t_k$, ya que aunque existan los límites laterales: \begin{equation*} \lim_{t \to t_k^+} \gamma'(t) \quad \text{y} \quad \lim_{t \to t_k^-} \gamma'(t), \end{equation*}estos pueden no ser iguales.
Definición 32.11. (Contorno o camino en $\mathbb{C}$.) Se define a un contorno o camino en el plano complejo $\mathbb{C}$, como la unión finita de curvas de clase $C^1$ o de clase $C^1$ a trozos.Es decir, un contorno es una sucesión de curvas suaves $\left\{\gamma_1, \ldots, \gamma_n\right\}$ tal que el punto final de $\gamma_k$ coincide con el punto de origen de $\gamma_{k+1}$, para $1\leq k \leq n-1$.
Es común denotar a un contorno a través de la letra $C$, aunque igual puede utilizarse alguna letra griega.
Ejemplo 32.7. Un ejemplo sencillo de un camino en $\mathbb{C}$ es una poligonal, definición 10.5, la cual podemos pensar como una curva suave a trozos dada por la unión finita de los segmentos de recta $[z_1, z_2], [z_2, z_3], \ldots, [z_{n-1}, z_n]$, cuyo punto de origen es $z_1$ y su punto final es $z_n$. Al igual que cualquier curva, una poligonal puede ser simple, cerrada o cerrada simple.
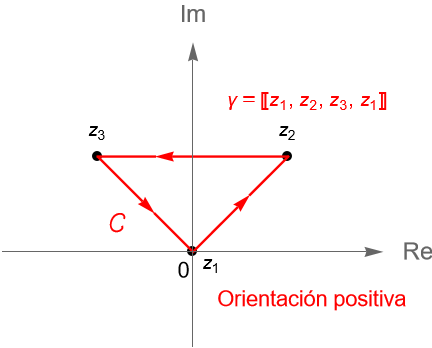
Si consideramos a $z_1=0, z_2 = 1+i$ y $z_3=-1+i$, entonces la poligonal $[z_1, z_2, z_3, z_1]$ resulta ser un camino cerrado simple, figura 117.
Figura 117: Gráfica de la poligonal $[z_1, z_2, z_3, z_1]$.
Podemos describir al camino $\gamma$, dado por la poligonal $[z_1, z_2, z_3, z_1]$, parametrizando a los segmentos $[z_1, z_2]$, $[z_2, z_3]$ y $[z_3, z_1]$, como las curvas suaves $\gamma_1$, $\gamma_2$ y $\gamma_3$, definidas en el intervalo $[0,1]$, dadas por: \begin{align*} \gamma_1(t):=[z_1, z_2](t) & = 0+(1+i-0)t = (1+i)t,\\ \gamma_2(t):=[z_2, z_3](t) & = 1+i+[-1+i-(1+i)]t = 1+i-2t,\\ \gamma_3(t):=[z_3, z_1](t) & = -1+i+[0-(-1+i)]t = (-1+i)(1-t). \end{align*}
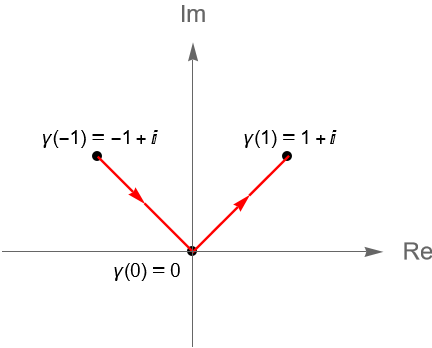
Ejemplo 32.8. Veamos que la curva dada por $\gamma(t)=t+i|t|$, con $t\in[-1,1]$, no es una curva suave, sin embargo sí es un camino, es decir, una curva suave a trozos.
Solución. Primeramente tenemos que los puntos de origen y final de la curva son, respectivamente: \begin{equation*} \gamma(-1)=-1+i|-1|=-1+i \quad \text{y} \quad \gamma(1)=1+i|1|=1+i. \end{equation*}
Es claro que $\gamma(t)=t+i|t|$ es una trayectoria ya que sus funciones paramétricas $x(t)=t$ y $y(t)=|t|$ son continuas en $[-1,1]$. No es difícil verificar que $\gamma$ es inyectiva y por tanto simple, por lo que se deja como ejercicio al lector.
Podemos visualizar la curva asociada a $\gamma$ en la figura 118.
Figura 118: Gráfica de la curva $\gamma(t)=t+i|t|$, con $t\in[-1,1]$.
Gráficamente es claro que en $t=0$ la trayectoria $\gamma$ no es diferenciable. Procedemos a verificarlo de forma analítica. Dado que: \begin{align*} \lim_{t\to 0^-} \frac{y(t)-y(0)}{t-0} &= \lim_{t\to 0^-} \frac{|t|}{t} = \lim_{t\to 0^-} \frac{-t}{t} = -1,\\ \lim_{t\to 0^+} \frac{y(t)-y(0)}{t-0} &= \lim_{t\to 0^+} \frac{|t|}{t} = \lim_{t\to 0^+} \frac{t}{t} = 1, \end{align*}tenemos que $y'(0)$ no existe, entonces, por la observación 32.5, $\gamma'(0)$ no existe, por lo que $\gamma$ no es una curva suave en $[-1,1]$. Sin embargo, notemos que podemos ver a la trayectoria $\gamma$ como: \begin{equation*} \gamma(t)= \left\{ \begin{array}{lcc} t-it & \text{si} & -1 \leq t \leq 0 \\ \\ t+it & \text{si} & 0 \leq t \leq 1 \end{array} \right. \end{equation*}
Veamos entonces que bajo la restricción de $\gamma$ a los intervalos $[-1,0]$ y $[0,1]$ obtenemos curvas suaves.
Para $t\in[-1,0]$ tenemos que $\gamma(t)=t-it$ es una función continua. Más aún, para $t_0\in(-1,0)$ tenemos que: \begin{equation*} \gamma'(t_0) = \lim_{t\to t_0} \frac{\gamma(t)-\gamma(t_0)}{t-t_0} = \lim_{t\to t_0} \frac{(t-t_0)(1-i)}{t-t_0} = 1-i. \end{equation*}
Mientras que: \begin{align*} \gamma'(-1) &= \lim_{t \to -1^{+}} \frac{\gamma(t)-\gamma(-1)}{t-(-1)} = \lim_{t \to -1^{+}} \frac{(1-i)(t+1)}{t+1} = 1-i,\\ \gamma'(0) &= \lim_{t \to 0^{-}} \frac{\gamma(t)-\gamma(0)}{t-0} = \lim_{t \to 0^{-}} \frac{t-it}{t} = 1-i, \end{align*}por lo que es claro que $\gamma'(t)$ existe para todo $t\in[-1,0]$ y es una función continua en dicho intervalo, entonces para $t\in[-1,0]$ tenemos que $\gamma(t)=t-it$ es una curva suave.
De manera análoga, se puede verificar que para $t\in[0,1]$ la trayectoria $\gamma(t)=t+it$ es una curva suave. Por lo tanto, la curva dada por $\gamma(t)=t+i|t|$, con $t\in[-1,1]$, es una curva suave a trazos, es decir, es un camino en $\mathbb{C}$.
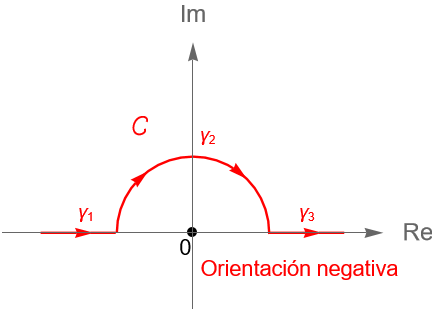
Ejemplo 32.9. El contorno $C$ dado en la figura 119 está formado por las curvas suaves $\gamma_1(t)=t, \gamma_2(t)=e^{i\frac{\pi}{2}(1-t)}$ y $\gamma_3(t)=t$ determinadas por el segmento de recta $[-2, -1]$, la semicircunferencia unitaria en el semiplano superior y el segmento de recta $[1, 2]$, respectivamente.
Podemos parametrizar al contorno $C$ mediante la trayectoria: \begin{equation*} \gamma:[-2,2] \to \mathbb{C}, \end{equation*}dada por: \begin{equation*} \gamma(t) = \left\{ \begin{array}{lcc} t & \text{si} & -2 \leq t \leq -1,\\ \\ e^{i\frac{\pi}{2}(1-t)}, & \text{si} & -1 \leq t \leq 1, \\ \\ t, & \text{si} & 1 \leq t \leq 2. \end{array} \right. \end{equation*}
Figura 119: Gráfica del contorno $C$ dado por la trayectoria $\gamma$ del ejemplo 32.8.
Existen dos métodos elementales para modificar o combinar curvas, con el objetivo de obtener nuevas curvas.
Definición 32.12. (Curva opuesta.) Si $\gamma: [a,b] \to \mathbb{C}$ es una trayectoria, con $a<b$, se define a la curva opuesta de $\gamma$, la cual se denota como $-\gamma$, a la trayectoria: \begin{equation*} -\gamma:[a,b]: \to \mathbb{C}, \end{equation*}dada por: \begin{equation*} -\gamma(t) := \gamma(b+a-t), \quad \forall t\in[a,b]. \tag{32.4} \end{equation*}
Debe ser claro que la curva asociada a $\gamma$ y a $-\gamma$ es la misma, pero $\gamma(t)$ y $-\gamma(t)$ recorren dicha curva en sentido contrario, es decir, la orientación de una respecto a la otra es opuesta conforme $t$ toma valores en $[a,b]$. En particular, el punto de origen de una es el punto final de la otra.
Observación 32.14. Se puede probar que si $\gamma$ es una curva suave a trozos, entonces $-\gamma$ también es una curva suave a trozos, ejercicio 3.
Ejemplo 32.10. Determinemos la curva opuesta del segmento de recta $[z_1, z_2]$, con $z_1 \neq z_2$.
Solución. De acuerdo con el ejemplo 32.2 sabemos que una parametrización del segmento $[z_1, z_2]$ está dada por la trayectoria: \begin{equation*} \gamma:[0,1]: \to \mathbb{C}, \end{equation*}dada por: \begin{equation*} \gamma(t) = z_1 + (z_2-z_1)t, \quad \forall t\in[0,1], \end{equation*}por lo que, considerando (32.4) tenemos que: \begin{equation*} -\gamma(t) = \gamma(1-t) = z_1 + (z_2-z_1)(1-t) = z_2 + (z_1-z_2)t, \quad \forall t\in[0,1]. \end{equation*}
Definición 32.13. (Curva suma o yuxtaposición.) Si $\gamma_1: [a_1,b_1] \to \mathbb{C}$ y $\gamma_2: [a_2,b_2] \to \mathbb{C}$, con $a_i<b_i$ para $i=1, 2$, son dos trayectorias tales que $\gamma_1(b_1) = \gamma_2(a_2)$, se define a la curva suma o a la yuxtaposición de $\gamma_1$ y $\gamma_2$, la cual se denota como $\gamma_1+\gamma_2$, a la trayectoria: \begin{equation*} \gamma_1+\gamma_2:[a_1,b_1+b_2-a_2]: \to \mathbb{C}, \end{equation*}dada por: \begin{equation*} (\gamma_1+\gamma_2)(t) :=\left\{ \begin{array}{lcc} \gamma_1(t), & \text{si} & a_1 \leq t \leq b_1,\\ \\ \gamma_2(t-b_1+a_2), & \text{si} & b_1 \leq t \leq b_1 +b_2 – a_2. \end{array} \right. \end{equation*}
La curva asociada a la trayectoria $\gamma_1+\gamma_2$ corresponde con la curva de $\gamma_1$ seguida de la de $\gamma_2$.
Observación 32.15. En general, se puede definir por inducción la suma finita $\gamma_1 + \cdots + \gamma_n$, de las trayectorias $\gamma_k: [a_k,b_k] \to \mathbb{C}$, con $1\leq k \leq n$, tales que $\gamma_j(b_j) = \gamma_{j+1}(a_{j+1})$ para $j=1,2,\ldots,n-1$. De hecho se puede probar que la suma de trayectorias de clase $C^1$ a trozos es también una trayectoria suave, ejercicio 3. Más aún, se puede verificar que una trayectoria $\gamma$ de clase $C^1$ a trozos se puede expresar como la suma finita de trayectorias suaves, es decir, $\gamma = \gamma_1 + \cdots + \gamma_n$, ejercicio 6.
Ejemplo 32.11. De acuerdo con la definición 32.13 y la observación 32.15, no es difícil verificar que el camino $\gamma$ del ejemplo 32.7, que describe a la poligonal $[z_1, z_2, z_3, z_1]$, con $z_1=0, z_2 = 1+i$ y $z_3=-1+i$, figura 117, se puede ver como la suma de las curvas suaves: \begin{align*} \gamma_1(t) = (1+i)t, \quad \gamma_2(t) = 1+i-2t, \quad \gamma_3(t) = (-1+i)(1-t), \quad \forall t\in[0,1], \end{align*}es decir: \begin{equation*} \gamma := (\gamma_1+\gamma_2 +\gamma_3) : [0, 3] \to \mathbb{C} \end{equation*}dada por: \begin{equation*} \gamma(t) = (\gamma_1+\gamma_2+\gamma_3)(t) =\left\{ \begin{array}{lcc} (1+i)t & \text{si} & 0 \leq t \leq 1,\\ \\ 3+i-2t, & \text{si} & 1 \leq t \leq 2, \\ \\ (-1+i)(3-t), & \text{si} & 2 \leq t \leq 3. \end{array} \right. \end{equation*}
Ejemplo 32.12. Consideremos a la curva $\gamma:[0,4]\to\mathbb{C}$ dada por: \begin{equation*} \gamma(t) = \left\{ \begin{array}{lcc} t & \text{si} & 0 \leq t \leq 1,\\ \\ 1+i(t-1), & \text{si} & 1 \leq t \leq 2, \\ \\ 3-t+i, & \text{si} & 2 \leq t \leq 3, \\ \\ i(4-t), & \text{si} & 3 \leq t \leq 4. \end{array} \right. \end{equation*}
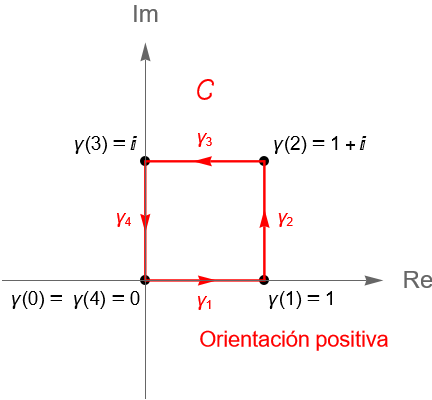
Dicha curva es un contorno cerrado simple, ya que es una curva suave a trozos, cerrada simple. Más aún, dicha curva corresponde con la frontera del cuadrado con vértices en $z_1=0, z_2=1, z_3=1+i$ y $z_4=i$, la cual puede verse como la suma de los segmentos de recta $[z_1, z_2]$, $[z_2, z_3]$ y $[z_3, z_1]$, es decir, como la poligonal cerrada $[z_1, z_2, z_3, z_1]$, figura 120.
Figura 120: Gráfica del contorno $C$ correspondiente con la frontera del cuadrado con vértices en $z_1=0, z_2=1, z_3=1+i$ y $z_4=i$.
Definición 32.14. (Reparametrización de una curva en $\mathbb{C}$.) Sean $\gamma: [a,b] \to \mathbb{C}$ y $\beta: [c,d] \to \mathbb{C}$, con $a<b$ y $c<d$, dos trayectorias suaves. Si existe una biyección $\sigma:[c,d] \to [a,b]$ continua y de clase $C^1$, tal que $\sigma$ es creciente y $\beta=\gamma\circ \sigma$, se dice que $\beta$ es una reparametrización de $\gamma$.
Observación 32.16. De la definición anterior debe ser claro que aunque la parametrización de $\gamma$ y $\beta$ sea distinta, ambas trayectorias tienen la misma curva asociada y existe una relación entre la parametrización de cada trayectoria descrita por la función $\sigma$. Más aún, se puede verificar que si $\sigma$ es una función de clase $C^1$ o de clase $C^1$ a trozos, se tiene una reparametrización de clase $C^1$ o de clase $C^1$ a trozos, respectivamente.
Ejemplo 32.13. Veamos que las siguientes trayectorias $\beta$ son una reparametrización de la trayectorias $\gamma$ dadas.
a) Sean $z_1, z_2\in\mathbb{C}$ tales que $z_1 \neq z_2$. Sean $\beta:\left[0, k\right] \to \mathbb{C}$, con $k=|z_2-z_1|>0$, y $\gamma:[0,1] \to \mathbb{C}$ dadas, respectivamente, por: \begin{equation*} \beta(t) = z_1 + \frac{(z_2-z_1)t}{k}, \quad \gamma(t) = z_1 + (z_2-z_1)t. \end{equation*}
Solución. Sea $\sigma:[0,k]\to[0,1]$ dada por $\sigma(t)=\dfrac{t}{k}$, con $k=|z_2-z_1|>0$. Claramente $\sigma$ es una función biyectiva continua, de clase $C^1$ con derivada $\sigma'(t)=\dfrac{1}{k}>0$ para todo $t\in[0,k]$, por lo que $\sigma$ es una función creciente. Más aún, tenemos que: \begin{equation*} \gamma(\sigma(t))= \gamma\left(\dfrac{t}{k}\right) = z_1 + \frac{(z_2-z_1)t}{k} = \beta(t), \quad \forall t\in[0,k], \end{equation*}por lo que $\beta$ es una reparametrización de $\gamma$.
b) Sean $z_0\in\mathbb{C}$ fijo y $r>0$. Sean $\gamma:\left[0, 2\pi\right] \to \mathbb{C}$ y $\beta:[0,1] \to \mathbb{C}$ dadas, respectivamente, por: \begin{equation*} \gamma(t) = z_0 + re^{it}, \quad \beta(t) = z_0 + re^{i2\pi t}. \end{equation*}
Solución. Sea $\sigma:[0,1]\to[0,2\pi]$ dada por $\sigma(t)=2\pi t$. Es claro que $\sigma$ es una función biyectiva continua, de clase $C^1$ con derivada $\sigma'(t)=2\pi>0$ para todo $t\in[0,1]$, por lo que $\sigma$ es una función creciente. Tenemos que: \begin{equation*} \gamma(\sigma(t))= \gamma\left(2\pi t\right) = z_0 + re^{i2\pi t} = \beta(t), \quad \forall t\in[0,1], \end{equation*}por lo que $\beta$ es una reparametrización de $\gamma$.
De nuestros cursos de Cálculo sabemos que la longitud del arco de una curva es una cantidad bastante útil. Recordemos que si $\gamma:[a,b] \to\mathbb{R}^2$ es una curva suave parametrizada por las funciones reales $x, y:[a,b] \to\mathbb{R}$, es decir, $\gamma(t) = (x(t), y(t))$, entonces la longitud del arco de dicha curva se puede obtener como: \begin{equation*} \int_{a}^{b} \sqrt{[x'(t)]^2+[y'(t)]^2} \,dt. \tag{32.5} \end{equation*}
Motivados en lo anterior tenemos la siguiente:
Definición 32.15. (Longitud de una curva en $\mathbb{C}$.) Sea $\gamma: [a,b] \to \mathbb{C}$, con $a<b$, una trayectoria suave a trozos. Se define la longitud de $\gamma$ como: \begin{equation*} \ell(\gamma):= \int_{a}^{b}|\gamma'(t)| \, dt. \end{equation*}
Definición 32.16. (Curva rectificable en $\mathbb{C}$.) Sea $\gamma: [a,b] \to \mathbb{C}$, con $a<b$, una trayectoria suave a trozos. Se dice que la curva $\gamma$ es rectificable si tiene longitud finita.
Observación 32.17. Geométricamente es claro que $\ell(\gamma)$ es igual a longitud del arco de la curva asociada a $\gamma$.
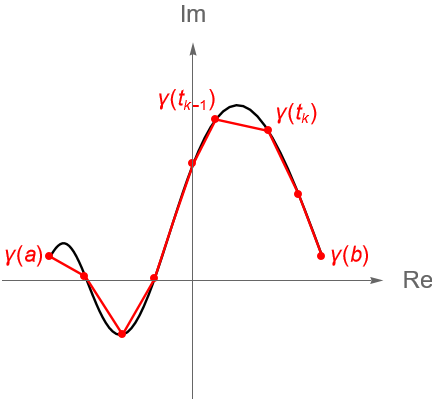
Sabemos que la longitud de la curva $\gamma(t)=x(t)+iy(t)$ se puede aproximar sumando la longitud de segmentos de rectas dados por puntos sobre la curva, es decir, obteniendo la longitud de una poligonal formada por una partición: \begin{equation*} P : a=t_0 < t_1 < \cdots < t_{n-1}<t_n=b, \end{equation*}del intervalo $[a,b]$, figura 121. Dicha longitud se puede obtener mediante: \begin{equation*} \sum_{k=1}^n |\gamma(t_k) – \gamma(t_{k-1})| = \sum_{k=1}^n \sqrt{\left[x(t_k)-x(t_{k-1})\right]^2+\left[y(t_k)-y(t_{k-1})\right]^2}. \end{equation*}
Entonces, la longitud de $\gamma$ es el límite, cuando este existe, de las sumas del lado derecho de la igualdad conforme la partición de $[a,b]$ se refina. Considerando lo anterior, no es difícil mostrar analíticamente que una curva suave a trozos es rectificable, es decir, el límite anterior está dado por (32.5), por lo que los detalles se dejan como ejercicio al lector.
Se puede consultar a detalle la prueba de este hecho en:
Introducción a funciones analíticas y transformaciones conformes, Gabriel D. Villa Salvador.
Function of One Complex Variable, John B. Conway.
Figura 121: Gráfica de la aproximación de la longitud de la curva $\gamma$ mediante una poligonal.
Ejemplo 32.14. Determinemos las longitudes de las siguientes trayectorias.
a) Sean $z_1, z_2\in\mathbb{C}$ tales que $z_1 \neq z_2$. Sea $\gamma:\left[0, 1\right] \to \mathbb{C}$, dada por: \begin{equation*} \gamma(t) = z_1 + (z_2-z_1)t. \end{equation*}
Solución. Geométricamente la curva asociada a $\gamma$ es el segmento de recta que une a $z_1$ y $z_2$. Más aún, es claro que $\gamma$ es una curva suave con derivada $\gamma'(t) = z_2-z_1\neq 0$, para todo $t\in[0,1]$, por lo que: \begin{equation*} \ell(\gamma) = \int_{0}^{1}|\gamma'(t)| \, dt = \int_{0}^{1}|z_2-z_1| \,dt = |z_2-z_1|. \end{equation*}
b) Sean $z_0\in\mathbb{C}$ fijo y $r>0$. Sea $\gamma:\left[0, 2\pi\right] \to \mathbb{C}$, dada por: \begin{equation*} \gamma(t) = z_0 + re^{it}. \end{equation*}
Solución. Geométricamente sabemos que la curva asociada a $\gamma$ es la circunferencia con centro en $z_0$ y radio $r$, la cual es una curva suave con derivada: \begin{equation*} \gamma'(t) = r ie^{it}\neq 0, \quad \forall t\in[0,1], \end{equation*}por lo que: \begin{equation*} \ell(\gamma) = \int_{0}^{2\pi}|\gamma'(t)| \, dt = \int_{0}^{2\pi}|r ie^{it}| \, dt = \int_{0}^{2\pi} r \, dt = 2\pi r. \end{equation*}
Tarea moral
Describe las propiedades de las siguientes curvas. a) $\gamma(t)=t^2+it^4$, para $t\in[-1,1]$. b) $\gamma(t)=e^{-it^2}$, para $t\in[0,\sqrt{2\pi}]$. c) $\gamma(t)=2\operatorname{cos}(t)+i\operatorname{sen}(t)$, para $t\in[0,2\pi]$. d) $\gamma(t)=exp\left(i\pi\sqrt[3]{t}\right)$, para $t\in[-1,1]$. e) $\gamma(t)=e^{t}+ie^{-t}$, para $t\in[0,1]$.
Determina las reglas de correspondencia de las trayectorias $-\alpha$, $-\beta$, $-\gamma$, $\alpha-\beta$, $\beta-\gamma$, $\alpha-\beta+\gamma$ y $-\alpha+\beta-\gamma$, para $\alpha(t)=t+it$, $\beta(t)=t+it^2$ y $\gamma(t)=t^2+it$, con $t\in[0,1]$. En cada caso determina la gráfica de la curva correspondiente.
Sean $\gamma:[a,b]\to\mathbb{C}$ y $\beta:[c,d]\to\mathbb{C}$ dos curvas suaves a trozos tales que $\gamma(b) = \beta(c)$. Prueba que $-\gamma$ y $\gamma+\beta$ son también curvas suaves a trozos.
Sean $\alpha:[a_1,a_2]\to\mathbb{C}$, $\beta:[b_1,b_2]\to\mathbb{C}$ y $\gamma:[c_1,c_2]\to\mathbb{C}$ tres curvas suaves tales que $\alpha(a_2) = \beta(b_1)$ y $\beta(b_2) = \gamma(c_1)$. Prueba que $\alpha+(\beta+\gamma) = (\alpha+\beta)+\gamma$.
Sea $\gamma:[a,b]\to\mathbb{C}$ una curva y $a<c<b$. Prueba que $\gamma = \alpha+\beta$, donde $\alpha$ es la restricción de $\gamma$ al intervalo $[a,c]$ y $\beta$ es la restricción de $\gamma$ al intervalo $[c,b]$. ¿Cómo se puede utilizar este hecho para generalizar el resultado para una partición arbitraria $P : a=t_0<t_1<\cdots<t_n=b$ del intervalo $[a,b]$?
Prueba que una curva suave a trozos $\gamma$ se puede expresar como la suma finita de curvas suaves. Hint: Utiliza el ejercicio 4.
Sea $f(t)=t^2\operatorname{sen}\left(\frac{1}{t}\right)$ para $t\neq 0$ y $f(0)=0$. Prueba que la curva $\gamma(t)=t+if(t)$, con $t\in[-\pi, \pi]$, no es un contorno.
Verifica que la trayectoria: \begin{equation*} \gamma : [0, 1] \to \mathbb{C} \end{equation*}dada por: \begin{equation*} \gamma(t) = \left\{ \begin{array}{lcc} 3t(1+i) & \text{si} & 0 \leq t \leq \frac{1}{3},\\ \\ 3+i-6t, & \text{si} & \frac{1}{3} \leq t \leq \frac{2}{3}, \\ \\ (-1+i)(3-3t), & \text{si} & \frac{2}{3} \leq t \leq 1. \end{array} \right. \end{equation*} es otra parametrización del camino $C$ dado en el ejemplo 32.10.
Demuestra la proposición 32.1.
Determina la derivada de las siguientes funciones híbridas. a) $f(t)=te^{-it}$. b) $f(t)=e^{i2t^2}$. c) $f(t)=(2+i)\operatorname{cos}(3it)$. d) $f(t)=\operatorname{Log}(it)$. e) $f(t)=\dfrac{2+i+t}{-i-2t}$. f) $f(t)=\left(\dfrac{t+i}{t-i}\right)^2$.
Más adelante…
En esta primera entrada, de la cuarta unidad, hemos abordado algunos conceptos básicos pero elementales para la teoría de la integración compleja, entre ellos definimos lo que es una función híbrida, trayectoria, curva y contorno en el plano complejo $\mathbb{C}$. Vimos algunas de las propiedades de las funciones híbridas y probamos un resultado con el que ya estamos familiarizados por nuestros cursos de Cálculo, correspondiente con la regla de la cadena para la composición de funciones complejas y funciones híbridas.
En la siguiente entrada definiremos de manera formal a la integral para el caso complejo. Como veremos muchas de las definiciones que daremos estarán sustentadas en los resultados de Cálculo para las integrales de funciones reales e integrales de línea para funciones de varias variables.
(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
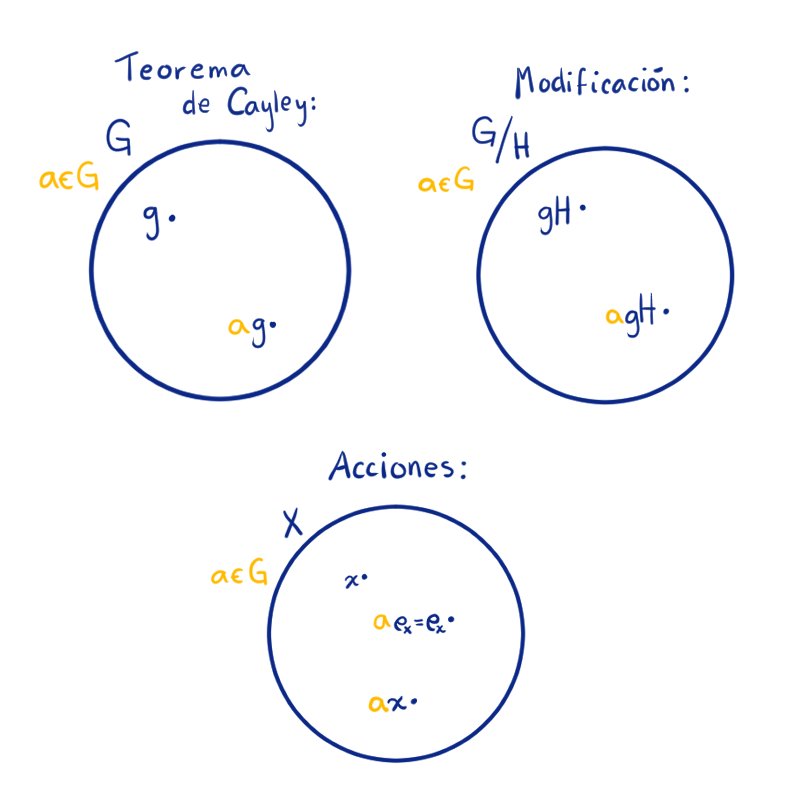
Antes de comenzar con el tema que nos compete, repasemos lo que hemos visto del Teorema de Cayley y su modificación de la entrada anterior. Primero, en el Teorema de Cayley, comenzamos tomando un grupo $G$, un $a$ en el grupo y actuamos con ese $a$ sobre el grupo, es decir multiplicamos los elementos. En resumen, nos permite mover los elementos del mismo grupo.
Con la modificación avanzamos en la abstracción. En el teorema nos tomamos el conjunto de clases laterales y ahora, $G$ actúa sobre las clases laterales. Detente un minuto para pensar, si cada vez somos más generales ¿cuál es el siguiente paso? ¿sobre quién queremos que actúe $G$ ahora?
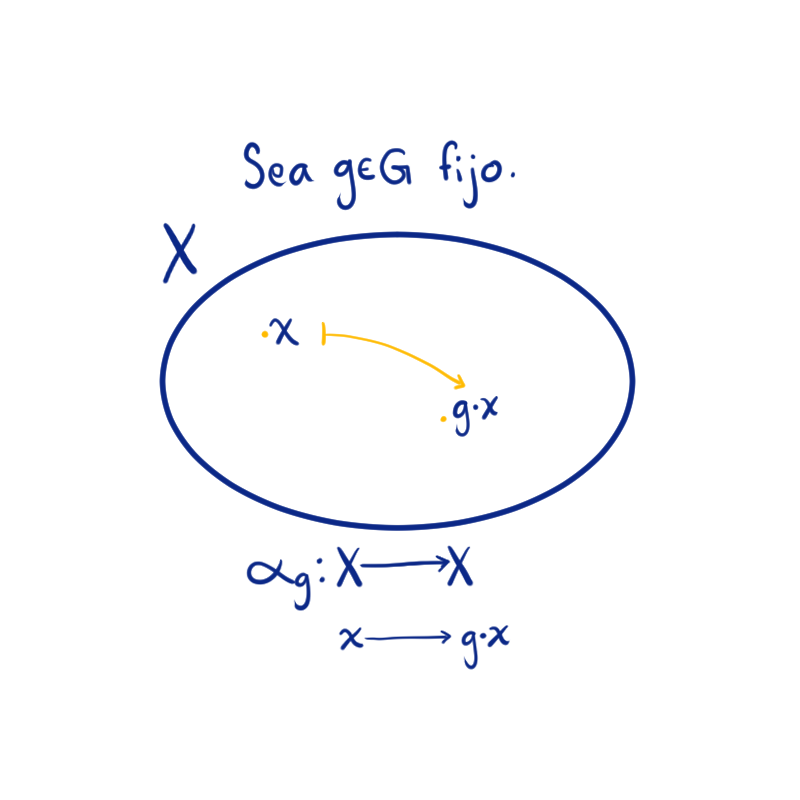
La respuesta es: sobre un conjunto cualquiera $X$. Ahora queremos pensar que usamos los elementos de $G$ para mover elementos de $X$. Para eso necesitamos una especie de producto, además de algunos matices. Por ejemplo, para un $x\in X$ cuando $a = e$, el elemento $a\cdot x = x$ se quede fijo y que si se multiplica por $a$ y luego por $b$, que sea lo mismo que multiplicar por $ab$, es decir $a\cdot(b\cdot x) = ab\cdot x$. Si se cumplen estas dos condiciones diremos que $a$ es una acción de $G$ en el conjunto $X$.
Diagrama de qué es una acción.
Luces, cámara, ¡acción!
Como verás, hemos estado usando el verbo actuar para referirnos a esta transformación que sucede al operar un $a\in G$ y otro elemento, sea del mismo $G$ o de las clases laterales. Aunque no hayamos definido formalmente qué es una acción, la realidad es que ya usar actuar da una idea de lo que estamos queriendo decir. Estamos usando un elemento de un grupo $G$ para mover un elemento de otro conjunto $X$. A continuación definiremos formalmente a una acción.
Definición. Sean $G$ un grupo y $X$ un conjunto. Si existe una función: \begin{align*} G \times X &\to X\\ (a,x) &\to a\cdot x \end{align*} para todos $a\in G, x\in X$, tal que:
$e \cdot x = x$ para toda $x\in X$.
$a \cdot (b\cdot x) = (ab)\cdot x $ para cualesquiera $a,b\in G, x\in X$,
decimos que la función es una acción de $G$ en $X$, y que $G$ actúa en $X$ o que $X$ es un $G$-conjunto.
Ejemplos.
Veamos algunos ejemplos nuevos y retomemos algunos otros, para verificar que esto es una generalización para lo que se hizo en el Teorema de Cayley y en su modificación.
Ejemplo 1. Sean $G$ grupo y $X=G$. Definimos $a\cdot x = ax$ para cualesquiera $a\in G, x\in X$. Es decir, definimos una acción sobre sí mismo. Probemos las dos condiciones:
\begin{align*} &e\cdot x = ex = x &\forall x\in X\\ &a\cdot(b\cdot x) = a\cdot(bx) = a(bx) = (ab)x = (ab)\cdot x &\forall a,b\in G,\; x\in X. \end{align*}
Así, todo grupo $G$ actúa en sí mismo mediante su operación binaria. Como vimos en la entrada del Teorema de Cayley.
Ejemplo 2. Sean $G$ grupo, $H\leq G$, $X = \{gH | g\in G\}$. Definimos $a\cdot (gH)= agH$ para toda $a,g\in G$. Ahora, probemos las dos condiciones de una acción:
Así se tiene una acción de $G$ en las clases laterales de $H$ en $G$. Este ejemplo lo vimos en la entrada de la modificación al Teorema de Cayley.
Por último, podemos ver un ejemplo nuevo.
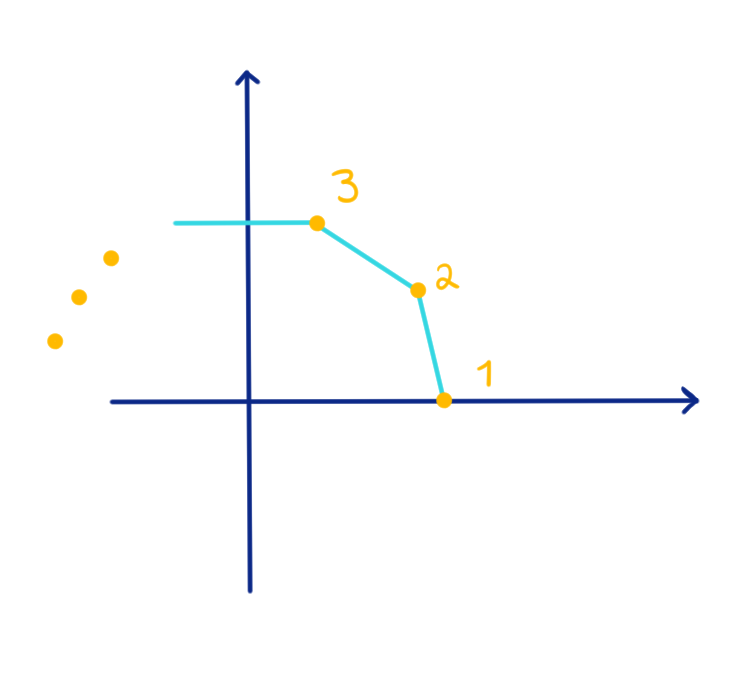
Ejemplo 3. Sean $G = D_{2n}$ el grupo diédrico, $X = \{1,2,\cdots, n\}$ los distintos vértices de polígono regular de $n$ lados.
Dados $g\in G, i\in X$ definimos $g\cdot i = j$ si $g$ manda el vértice $i$ en el vértice $j$. Recordemos que los elementos de un grupo diédrico son las simetrías del polígono regular de $n$ lados, es decir, son transformaciones lineales del plano que mandan del polígono en sí mismo. En particular, los vértices van a dar a vértices bajo estas transformaciones.
Representación de una grupo diédrico.
Entonces, como son transformaciones del plano nuestra acción quedaría como una evaluación $g \cdot i = g(i)$. Así, para todos $i\in X, g,h\in G$, \begin{align*} \text{id}\cdot i &= \text{id}(i) = i \\ g\cdot (h\cdot i )& = g\cdot (h(i)) = g(h(i)) = (gh) (i) = (gh) \cdot i. \end{align*}
Así, $D_{2n}$ actúa en el conjunto de vértices.
Recordemos que al escribir $(gh)\cdot i$, la operación que ocurre entre $g$ y $h$ es la composición. En este momento se omitió el símbolo $\circ$ para evitar confusiones con el símbolo $\cdot$ de acción.
Otra definición de Acción
Anteriormente hemos visto la noción de que los elementos de un grupo dan lugar a permutaciones. Usaremos esta idea para dar una definición de acción equivalente a la definición que acabamos de dar.
Teorema. Sean $G$ un grupo y $X$ un conjunto. Toda acción de $G$ en $X$ induce un homomorfismo de $G$ en $S_X$ y viceversa.
Es decir, existe una biyección entre el conjunto de acciones de $G$ en $X$ y el conjunto de homomorfismos entre $G$ y $S_X$. Recordemos que $S_X = \{\sigma: X \to X | \sigma \text{ es biyectiva}\}.$
Demostración. Sean $G$ un grupo y $X$ un conjunto. Supongamos que $G\times X \to X$ es una acción de $G$ en $X$ tal que $(g,x)\to g\cdot gx$. Para cada $g\in G$ definimos $\alpha_g : X\to X$ dada por $\alpha_g(x) = g\cdot x$ para toda $x\in X$.
Ilustración del efecto de $\alpha_g$.
Analicemos las funciones $\alpha_g$, veamos que son biyectivas:
\begin{align*} \alpha_g\circ\alpha_{g^{-1}}(x) & = \alpha_g(\alpha_{g^{-1}}) \\ &= \alpha_g(g^{-1}\cdot x) = g\cdot(g^{-1}\cdot x)\\ &= (gg^{-1})\cdot x &\text{Condición 2 de acción}\\ &= e\cdot x \\ &= x &\text{Condición 1 de acción}. \end{align*}
Entonces $\alpha_g\circ\alpha_{g^{-1}} = \text{id}_X$.
Análogamente $\alpha_{g^{-1}}\circ \alpha_g = \text{id}_X$. Entonces $\alpha_g$ es biyectiva, es decir $\alpha_g \in S_X$.
Definimos $\psi: G \to S_X$ con $\psi (g) = \alpha_g$ para toda $g\in G$.
Veamos que $\psi$ es un homomorfismo. Tomemos $g,h\in G$, \begin{align*} \psi(gh)(x) &= \alpha_{gh}(x) \\ &= (gh)\cdot x \\ &= g\cdot(h\cdot x) \\ &= \alpha_g(\alpha_h(x)) & \text{Condición 2}\\ &= \alpha_g \circ \alpha_g(h) \\ &= \psi(g) \psi(h)(x) &\forall x\in X. \end{align*}
Entonces $\psi(gh) = \psi(g)\psi(h)$ para cualesquiera $g,h\in G$.
Por lo tanto $\psi$ es un homomorfismo.
Ahora de regreso. Supongamos ahora que se tiene un homomorfismo $\psi: G\to S_X$. Entonces, para cada $g\in G, \psi(g) \in S_x$.
Definimos la función $G\times X \to X$ donde $(g,x)\to g\cdot x$. Entonces $g\cdot x = \psi(g)(x)$ para toda $g\in G, x\in X$. Además, $\psi(g)(x) \in X$.
Ahora veamos que esta función es una acción. La primera condición para ser acción se cumple de la siguiente manera:
Como $\psi$ es un homomorfismo, $\psi(e) = \text{id}_X$. Así, \begin{align*} e\cdot x& = \psi(e)(x) = \text{id}_X(x) = x &\forall x\in X. \end{align*}
Probemos la segunda condición de acción:
\begin{align*} g\cdot (h\cdot x) &= \psi(g) (\psi(h)(x)) \\ &= \psi(g)\circ \psi(h)(x) \\ &= \psi(gh)(x) \\ &= (gh) \cdot x & \psi\text{ es un homomorfismo}. \end{align*} Para $g,h\in G, x\in X$. Así $G$ actúa en $X$.
$\blacksquare$
Una relación de equivalencia
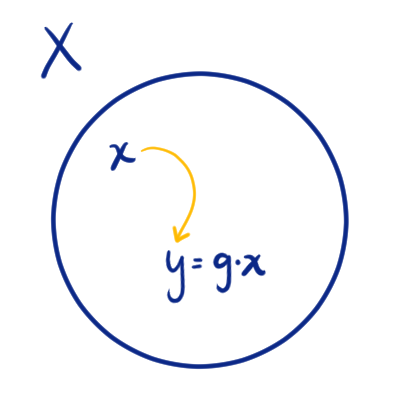
Si tenemos un grupo $G$ actuando sobre un conjunto $X$, entonces podemos considerar $g\in G$ y $x,y\in X$. Con los dos elementos $x,y$ de $X$, podemos preguntarnos ¿es posible llegar de $x$ a $y$ usando a $g$?, algo como $y = g\cdot x$. En realidad esto no es siempre posible, entonces podemos crear una relación de $x$ con $y$ si existe tal $g\in G$. Esto lo veremos en el siguiente resultado.
¿Es posible llegar de $x$ a $y$ usando a $g$?
Lema. Sean $G$ un grupo, $X$ un $G$-conjunto. Para todo $x,y\in X$, la relación en $X$: $x\sim y$ si y sólo si $g\cdot x = y$ para algún $g\in G$ es una relación de equivalencia.
Demostración. Sean $G$ un grupo, $X$ un $G$-conjunto. Definimos la relación en $X$ donde para todo $x,y\in X$. \begin{align*} x\sim y \Leftrightarrow g\cdot x = y \text{ para algún }g\in G. \end{align*}
Primero, por la condición 1 de acción, $e\cdot x = x$ para toda $x\in X$ con $e\in G$, entonces $x\sim x$ para toda $x\in X$. Por lo que nuestra relación es reflexiva.
Si $x,y\in X$ son tales que $x\sim y$, entonces existe $g\in G$ tal que $g\cdot x = y$. Así, \begin{align*} g^{-1} \cdot y &= g^{-1}\cdot (g\cdot x) \\ &= (g^{-1}g)\cdot x & \text{por condición } 2\\ &= (e\cdot x )\\ &= x & \text{por condición } 1 \end{align*}
con $g^{-1} \in G$, entonces $y\sim x$. Por lo que tenemos una relación simétrica.
Si $x,y,z\in X$ son tales que $x\sim y$ y $y\sim z$, entonces existen $g,h\in G$ tales que $g\cdot x = y$, $h\cdot y = z$. Así \begin{align*} (hg)\cdot x &= h\cdot (g\cdot x) &\text{condición } 2\\ &= h \cdot y\\ &= z \end{align*} con $hg\in G$. Entonces $x\sim z$. Así, nuestra relación es transitiva.
Por lo tanto $\sim$ es una relación de equivalencia.
$\blacksquare$
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
En los siguientes incisos determina si la función dada es una acción de $G$ en $X$:
Considera un campo $K$ y $V$ un $K$-espacio vectorial. Sea $G= K^*$ con el producto y $X= V$. Definimos $\lambda\cdot v = \lambda v$ para cada $\lambda\in K^*$ y $v\in V$. (Nota que $K^*$ es el campo sin el neutro aditivo).
Sean $G$ un grupo y $X=G$. Definimos $g\cdot x = g^{-1}xg$ para cada $g\in G$ y cada $x\in X$.
Sean $G$ un grupo y $X = \{H|H\leq G\}$. Definimos $g\cdot H = gHg^{-1}$ para cada $g\in G$ y cada $H\in X$.
Sean $G$ un grupo y $X=N$ un subgrupo normal de $G$. Definimos $g\cdot n= gng^{-1}$ para cada $g\in G$ y cada $n\in N$.
Sean $G$ un grupo y $X$ un $G$ conjunto. Considera el homomorfismo $\psi: G\to S_X$ asociado. ¿Es necesariamente $\psi$ un monomorfismo? Si lo es, pruébalo y si no, establece qué condiciones debería cumplir la acción para que lo sea.
Para repasar lo que hemos visto desde el Teorema de Cayley, puedes consultar el video en inglés de Mathemaniac.
Más adelante…
Hemos expandido la idea de que un grupo puede mover a los elementos de otro hasta llamarlo una acción. Luego, encontramos una relación de equivalencia a partir de la acción. Como es usual en este tipo de cursos, estudiaremos la partición inducida por esta relación de equivalencia y a partir de estos conjuntos, definiremos otros tipos de acciones.