En esta entrada empezamos a hacer un repaso de algunos conceptos geométricos elementales que probablemente has encontrado a lo largo de tu formación. Por un lado, esto puede ayudarte a recordar objetos geométricos específicos y resultados con los que ya te has encontrado. Además, es importante revisar nuevamente estos conceptos pues a partir de ahora necesitamos ser muy precisos con el lenguaje. Por ejemplo, será necesario que distingamos apropiadamente los segmentos, rectas y rayos entre ellos. Finalmente, esta entrada te ayudará a acostumbrarte a la notación que usamos en geometría, es decir, qué tipos de etiquetas le ponemos a cada tipo de objeto geométrico.
Antes de comenzar, hay una aclaración importante por hacer. El repaso que haremos de geometría es un repaso intuitivo. Más adelante, cuando asignemos coordenadas al plano y comencemos a hablar de vectores, entonces ahora sí ya estaremos definiendo nuestros conceptos geométricos de manera formal y tendremos que ser más cuidadosos con la argumentación lógica.
Objetos geométricos básicos
Puedes pensar a un punto como lo que obtienes al colocar la punta del lapiz sobre el papel. Es una figura que tiene una única posición. A los puntos usualmente los denotaremos con letras mayúsculas: $A$, $B$, $C$, $P$, $Q$, $R$, etc.
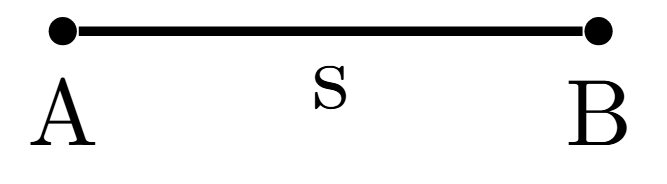
Un segmento es lo que se obtiene al unir dos puntos directamente el uno al otro. Otra manera de pensarlo es que se tiene que ir de un punto al otro de la manera «más rápida» o «más derecha» posible. A los dos puntos les llamamos los extremos del segmento. Si los nombres de los extremos de un segmento son $A$ y $B$, entonces al segmento lo nombramos $\overline{AB}$. En caso de tener que referirnos al segmento sin usar sus extremos, le podemos dar nombre con letra minúscula, por ejemplo $r, s, t$, etc.
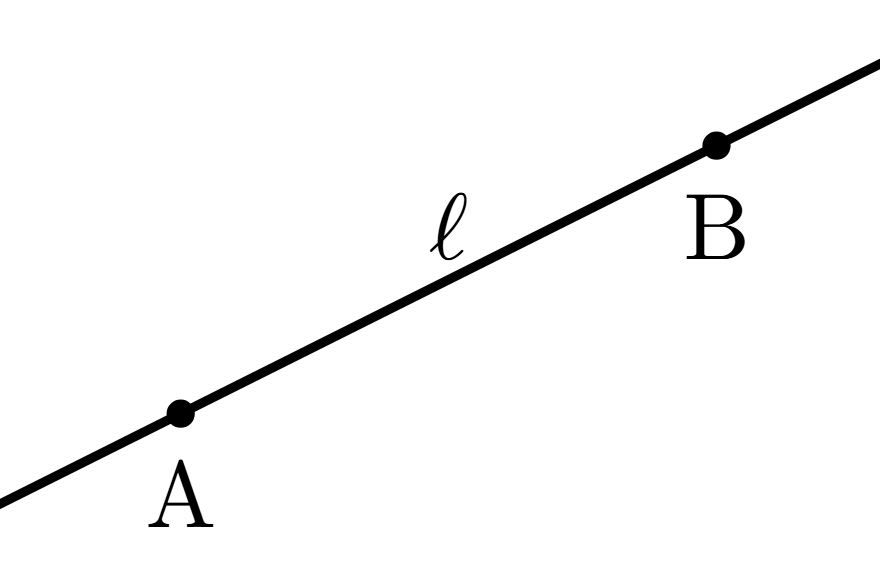
Cuando extendemos un segmento indefinidamente más allá de los dos puntos que lo definen, obtenemos una recta. Una recta queda definida por cualesquiera dos puntos distintos en ella. Si una recta tiene a los puntos distintos $A$ y $B$, entonces llamamos $AB$ a la recta. Aunque sea imposible de apreciarlo en el papel, en pizarrón o en la pantalla de una computadora, las rectas se extienden indefinidamente. Cuando no queremos usar puntos para referirnos a las rectas, las podemos llamar con letras minúsculas como $a,b,c,\ell$, etc.
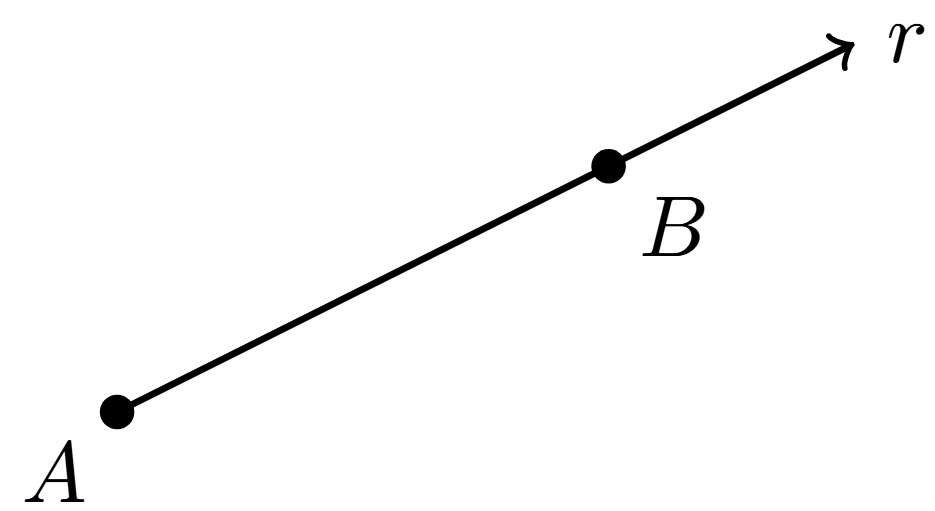
Si sólo extendemos el segmento más allá de sólo uno de los puntos que lo definen, entonces a la figura que obtenemos le llamamos un rayo. Observa que si tenemos dos puntos $A$ y $B$, entonces es distinto el rayo que extiende al segmento más allá de $B$, que el que extiende al segmento más allá de $A$. Al primero le llamamos el rayo desde $A$ por $B$ (como el que se muestra en la figura). Al segundo le llamamos el rayo desde $B$ por $A$. A los rayos, como a los segmentos, los podemos llamar con letras minúsculas como $r,s,t$,etc.
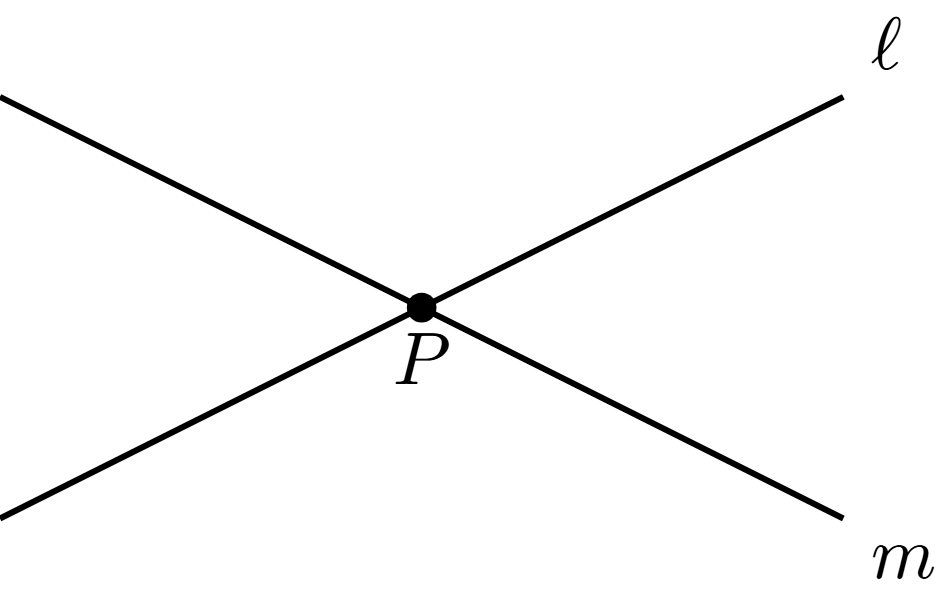
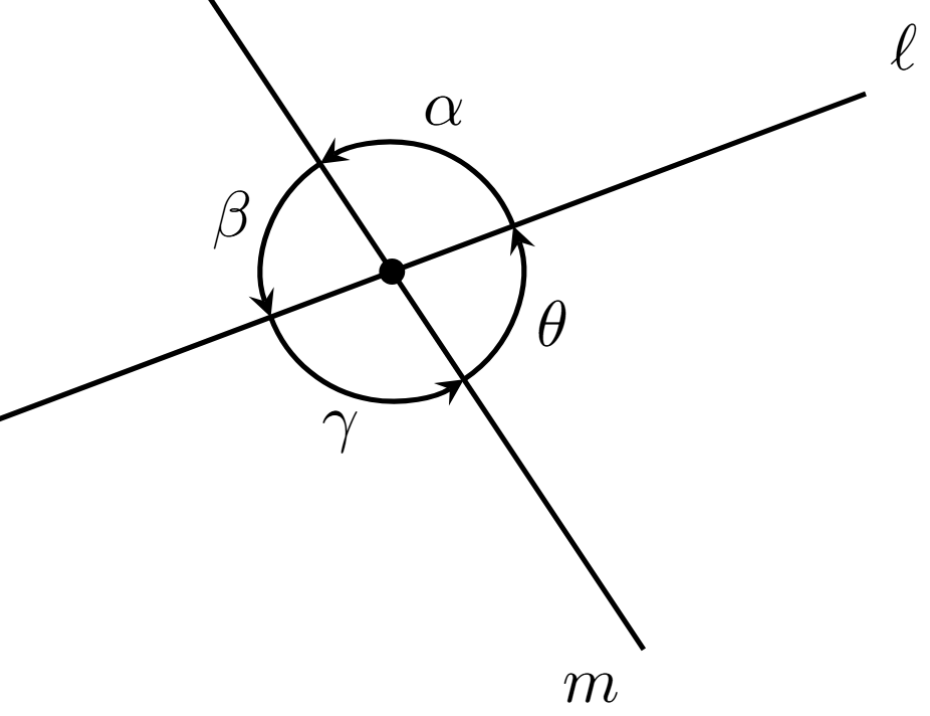
Cuando dos rectas, segmentos o rayos pasan por un mismo punto, decimos que se intersectan en dicho punto. En la siguiente figura, las rectas $\ell$ y $m$ se intersectan en el punto $P$.
Si $P$ es un punto de intersección de dos rectas distintas $\ell$ y $m$, entonces alrededor de $P$ se forman cuatro regiones. A cada una de las $4$ aperturas entre ambas rectas les llamamos un ángulo entre ellas. De manera similar podemos definir ángulos entre segmentos o rayos que se intersecten, o cualquier mezcla de estos objetos. Los ángulos usualmente los denotamos con letras griegas, como $\alpha, \beta, \gamma, \theta$, etc. (alpha, beta, gamma, theta, etc.).
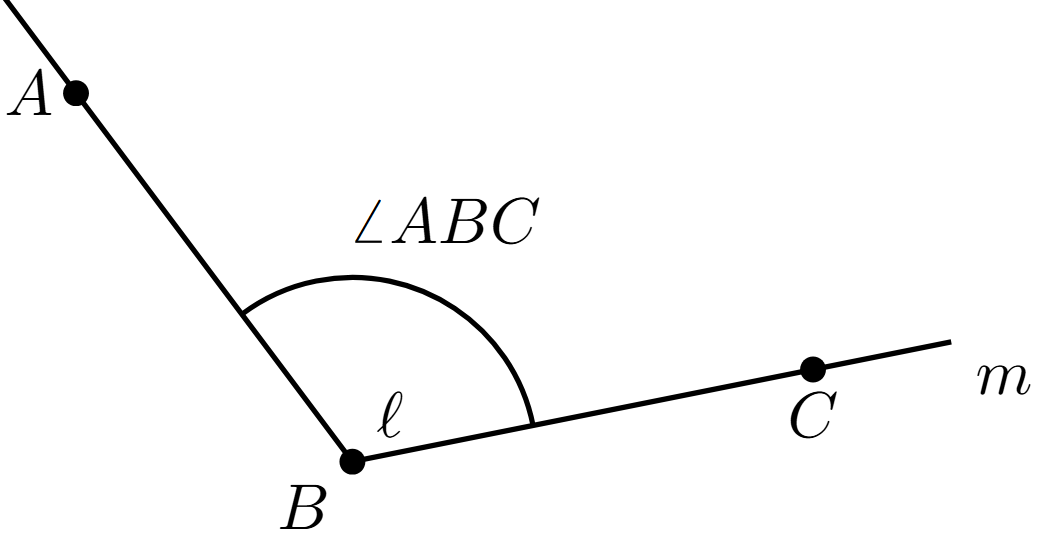
También podemos referirnos a ellos mediante un punto $A$ en $\ell$, el punto $B$ de intersección y un punto $C$ en $m$, en cuyo caso nos referiremos al ángulo como $\angle ABC$.
Triángulos
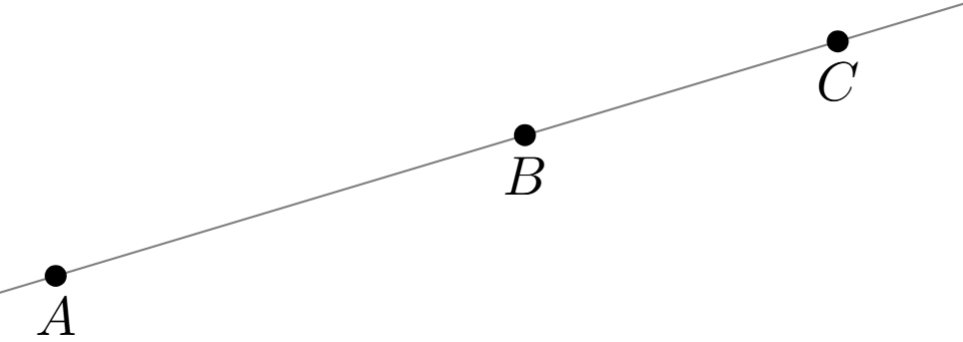
Es sumamente inusual que al colocar tres puntos $A$, $B$ y $C$ suceda que haya una misma recta que pase por los tres. Cuando esto pasa, decimos que los puntos están alineados o que son colineales.
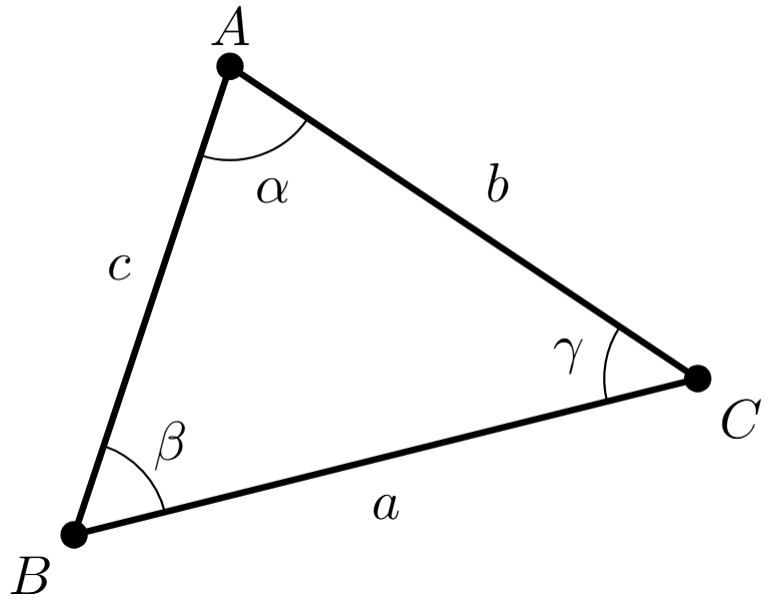
Si tomamos tres puntos no alineados $A$, $B$ y $C$, entonces podemos dibujar tres segmentos $BC$, $CA$ y $AB$. A la figura conformada por los tres puntos y los tres segmentos le llamamos un triángulo y usualmente lo denotamos por $\triangle ABC$. A $A$, $B$ y $C$ les llamamos los vértices del triángulo. A los segmentos $BC$, $CA$ y $AB$ les llamamos los lados del triángulo. Usualmente nombramos a estos lados $a,b,c$ para que cada lado use la misma letra que el vértice opuesto (pero en minúscula). A los ángulos dentro del triángulo en $A$, $B$ y $C$ les llamamos usualmente $\alpha, \beta, \gamma$.
Si quisiéramos insistir en llamar triángulo al caso en el que $A$, $B$ y $C$ están una misma recta, insistiremos en llamarlo un triángulo degenerado. En este caso, el triángulo está «apachurrado» y los segmentos que definen los puntos se enciman entre sí.
Mediciones
Parte de la raiz etimológica de la palabra geometría está relacionada con medir. En geometría, nos interesan ciertas magnitudes geométricas asociadas a objetos geométricos. Por el momento, apelaremos a la intuición que has desarrollado con anterioridad para definir estos conceptos pero, como mencionamos arriba, más adelante los formalizaremos.
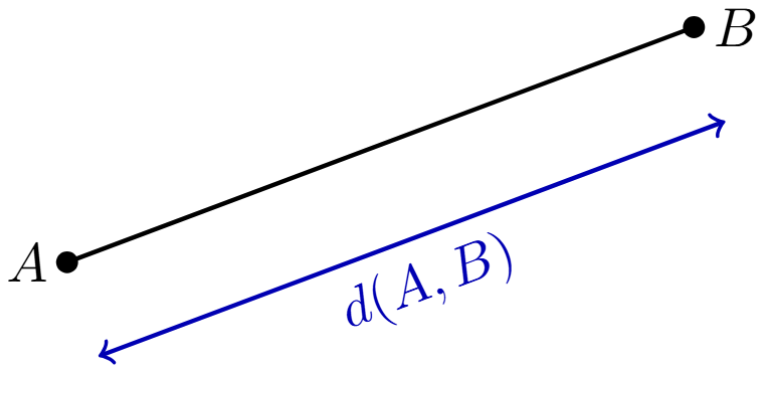
La distancia entre dos puntos $A$ y $B$ es una magnitud que mide qué tan alejados están los puntos entre sí. Mientras más alejados, mayor distancia entre ellos. Un punto $A$ está a distancia $0$ de sí mismo. Es lo que solías medir con una regla: si colocas un punto en el $0$ de la regla y el otro cae en el número $d$ de la regla, entonces la distancia entre ambos puntos será $d$. Podemos referirnos a la distancia con la letra $d$ y haciendo referencia a los puntos así: $d(A,B)$.
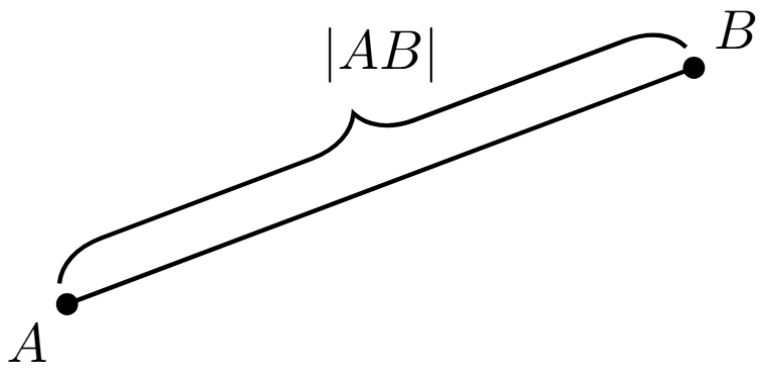
Una magnitud estrechamente relacionada con la distancia es la longitud de un segmento, y se puede pensar exactamente como la distancia entre sus extremos. Mientras más largo sea un segmento (intuitivamente, mientras más tengamos que dibujar para hacerlo), mayor será su longitud. Nos referiremos a la longitud de un segmento $AB$ con la expresión $|AB|$.
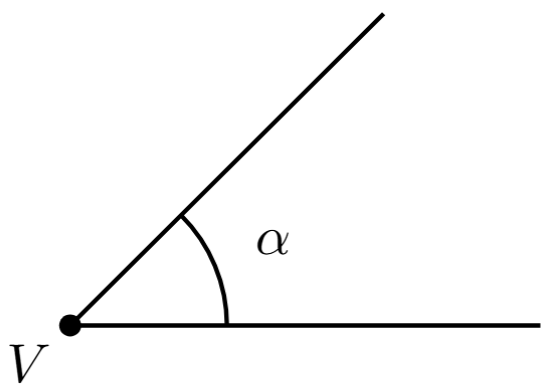
Otra medida importante es la de ángulo, que nos indica qué tan abierta la región del msimo nombre definida por dos rectas (o segmentos, o rayos), como la definimos arriba. A mayor apertura en el vértice del ángulo, mayor será la magnitud que le asociamos. Así, típicamente no hacemos distinción entre la región y su apertura, ni en nombre, ni en notación.
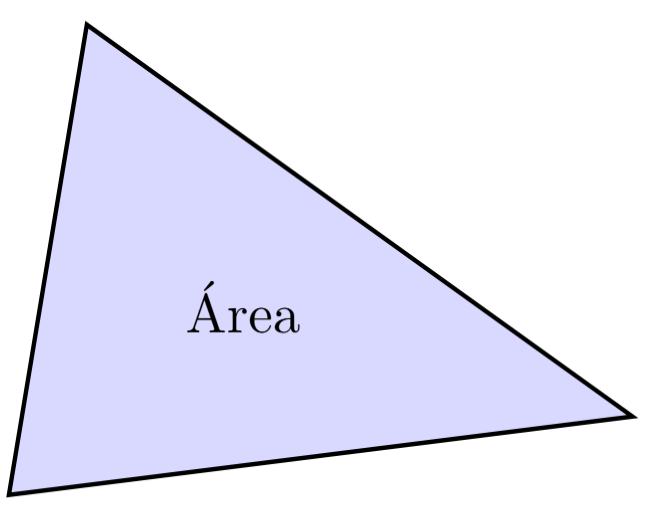
Finalmente, también nos interesa una medida de qué tan grande es la región contenida en una figura geométrica en el plano. A esta medida le llamamos el área de la región.
Transformaciones geométricas
Otra noción muy importante en la geometría analítica es la de «transformación». Esto se refiere a alterar nuestros objetos geométricos de alguna manera. Típicamente, esta manera es «amigable» en algún sentido, por ejemplo, respeta distancias o proporciones. Las siguientes son las transformaciones geométricas con las que debes estar más familiarizado de manera intuitiva.
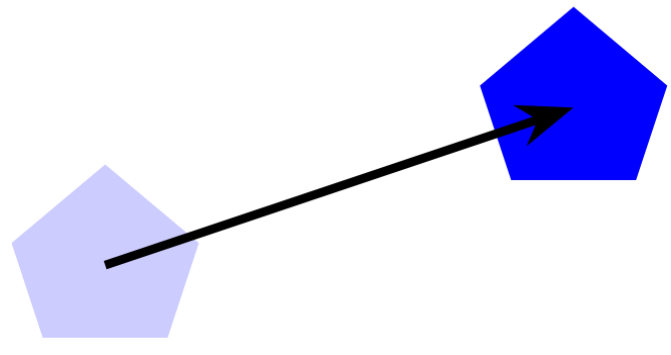
Las traslaciones consisten en mover un objeto de lugar, pero simplemente desplazándolo, sin girarlo.
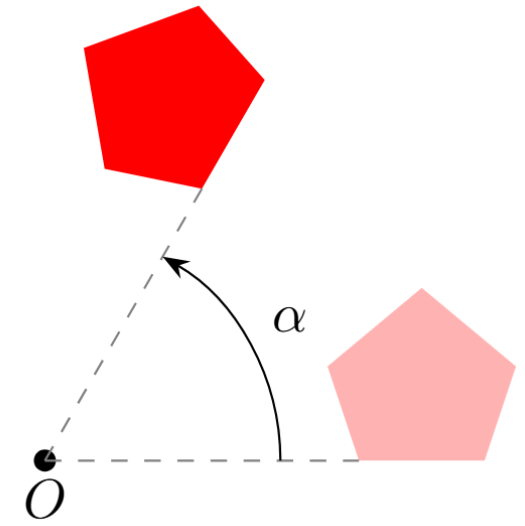
Las rotaciones consisten en girar un objeto geométrico alrededor de un punto que llamamos el centro de rotación. Para saber cuánto rotamos, usamos un ángulo de rotación. En la siguiente figura puedes ver una rotación con centro $O$ y ángulo $\alpha$.
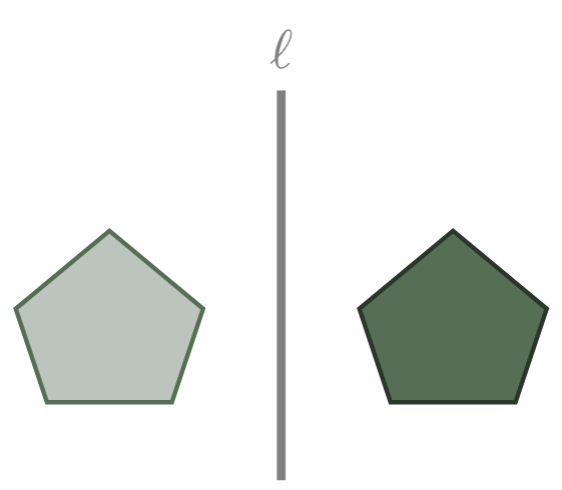
Las reflexiones consisten en tomar una recta $\ell$ y usarla como espejo, para reflejar en él el objeto que nos interesa.
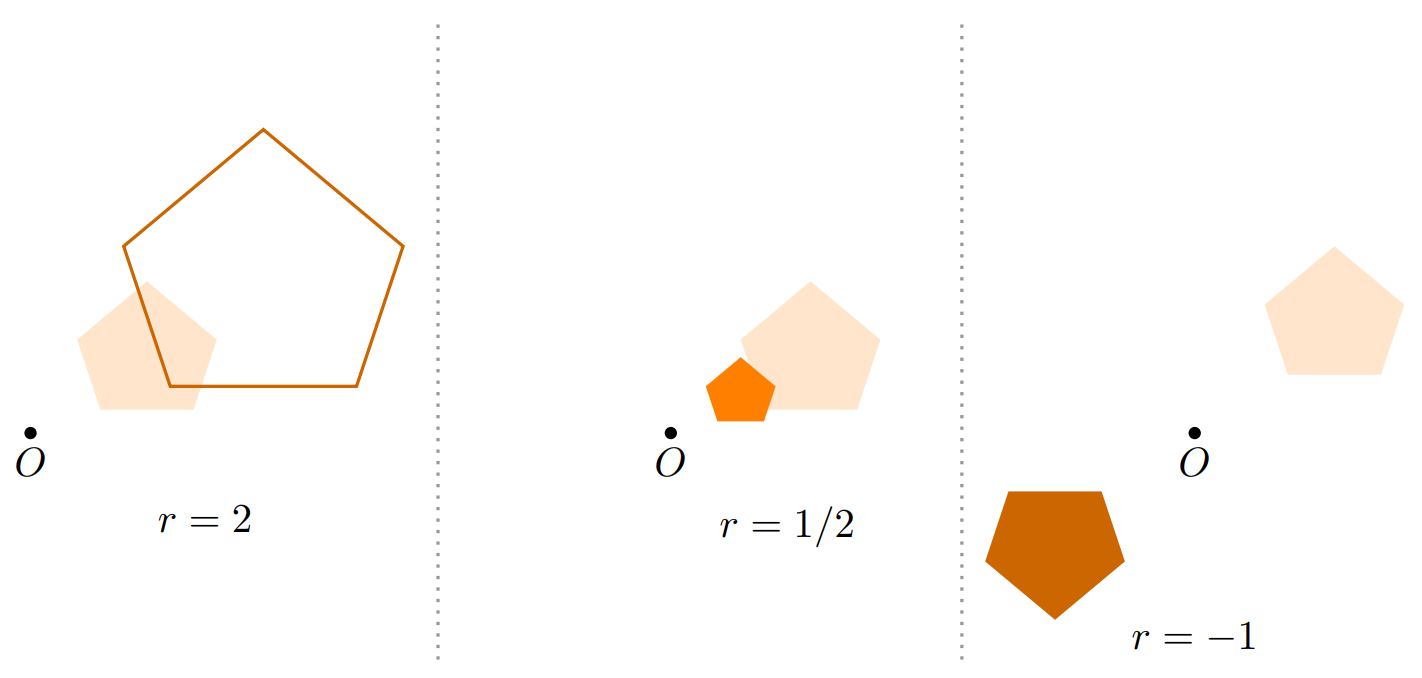
También consideraremos los reescalamientos, que pueden ser expansiones o contracciones. Tras aplicarlas, obtenemos un objeto geométrico más grande o más pequeño, pero que preserva las proporciones. Para definirlas, usualmente necesitamos un centro de reescalamiento $O$ y un factor de reescalamiento $r$. A continuación se muestran algunos ejemplos con con reescalamientos $2$, $1/2$ y $-1$, con la figura de sombreado claro como el objeto original. ¡El reescalamiento de $-1$ voltea la figura alrededor de $O$!
Hay más transformaciones geométricas, como las proyecciones o cizallamientos. Sin embargo, por ahora no hablaremos de ellas.
Aunque ahora hemos platicado lo que le hace una transformación a un objeto geométrico particular, usualmente nos interesará lo que le hace a todo el plano.
Más adelante…
En esta entrada repasamos varias nociones básicas de la geometría de una manera intuitiva. Es importante que tengas esta entrada como referencia, pues los nombres que usamos ahora para objetos geométricos, propiedades geométricas y transformaciones, serán los que usaremos más adelante. En las siguientes entradas continuaremos con un repaso de los resultados geométricos principales. Este repaso seguirá siendo intuitivo. Más adelante introduciremos formalidad en nuestro estudio de la geometría analítica.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Repasa la diferencia entre rectas, segmentos y rayos.
Explora la interfaz de GeoGebra para asegurarte de que sepas trazar todo lo que hemos platicado. En caso de que no encuentres la funcionalidad, averigua cómo hacerlo mediante una búsqueda en línea o mediante algún video explicativo.
Copia la siguiente figura en una hoja de papel. Luego, realiza manualmente una rotación de 90 grados alrededor del punto $O$.
Copia la siguiente figura en una hoja de papel. Luego, realiza manualmente una reflexión de la figura con respecto a la recta $\ell$.
Ahora vamos a trasladar al gato y a la casa. Pero tienes que hacerlo repetidamente. Haz la figura en tu cuaderno de modo que quede dentro de un cuadrado de 4cm de lado. Luego, repetidamente traslada ese cuadrado 5cm a la derecha para poner todas las copias que puedas de la figura hasta que se te acabe la hoja. Entonces, las transformaciones geométricas las podemos aplicar una y otra vez.
Sabemos que la gráfica de una función de $\mathbb{R}^2$ a $\mathbb{R}^2$ es un subconjunto de $\mathbb{R}^4$, por lo que si quisiéramos visualizar la gráfica de una función compleja de variable compleja, como hacíamos usualmente con funciones cuyas gráficas tenían lugar en $\mathbb{R}^2$ o en $\mathbb{R}^3$, nos será imposible.
Al trabajar en Cálculo con integrales dobles era de nuestro interés saber cómo se transformaban ciertas regiones $A\subset\mathbb{R}^2$ del plano, bajo ciertas transformaciones $T:\mathbb{R}^2 \to \mathbb{R}^2$ para poder entender de manera geométrica lo que sucedía al aplicar un cambio de variable con nuestras regiones de integración.
Una primera alternativa para poder estudiar la geometría de las funciones complejas, es analizar su comportamiento gráfico siguiendo esta idea de las transformaciones entre planos. Por lo que, resultará conveniente considerar a las funciones complejas como transformaciones del plano complejo, es decir, para darnos una idea de lo que hacen estas funciones las veremos como mapeos o transformaciones de un subconjunto de $\mathbb{C}$ en un plano $z$, que toman valores en un plano $w$. Si escribimos a $z=x+iy\in\mathbb{C}$ y a $w=u+iv\in\mathbb{C}$, tendremos al plano $z$ asociado con los ejes $x$ y $y$, mientras que para el plano $w$ se tienen los ejes $u$ y $v$, los cuales, en ambos casos, corresponden con los ejes real e imaginario, respectivamente.
Observación 26.1. Debemos tener presente que esta alternativa no es la única forma para dar una interpretación del comportamiento geométrico de una función compleja, ya que también puede representarse a las funciones complejas mediante:
las gráficas de su parte real e imaginaria,
las gráficas del módulo complejo de la función,
superficies de Riemann.
Se puede consultar un poco sobre estás técnicas en las siguientes ligas:
Sin embargo, para los fines del curso bastará con esta alternativa de pensar a las funciones como transformaciones del plano en el plano.
Para plantear lo anterior consideremos la siguiente:
Definición 26.1. Sea $S\subset\mathbb{C}$, se define a la imagen de $S$ bajo una función $f$, denotada por $f(S)$, como el conjunto: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \,:\, w = f(z),\, z\in S\right\}. \end{equation*}
Analicemos los siguientes ejemplos para comprender mejor esta idea de las transformaciones complejas.
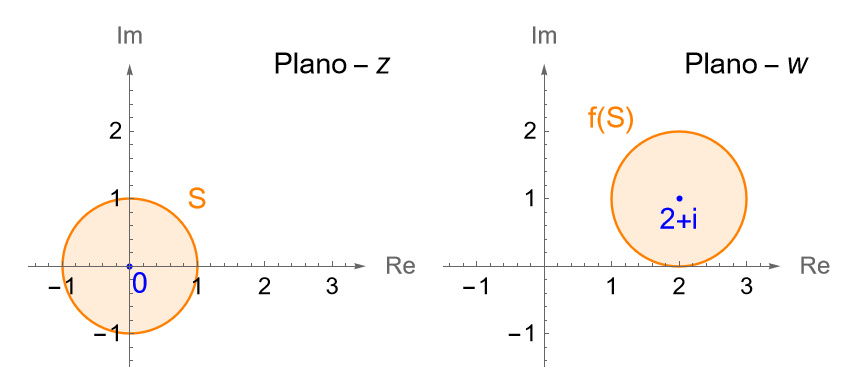
Ejemplo 26.1. Sea $S$ el disco unitario, es decir $S=\overline{B}(0,1)$. Determinemos la imagen de $S$ bajo la transformación $f(z) = z+2+i$.
Solución. Notemos que para cada $z\in S$ el valor de $w=f(z)$ está dado por la suma de $2+i$ al valor de $z$. Considerando a $z=x+iy$, tenemos que: \begin{equation*} w = f(z) = (x+2) + i(y+1), \end{equation*} por lo que la función $f$ transforma los puntos $(x,y)$ en los puntos $(u,v)$, donde $u=x+2$ y $v=y+1$. Es claro que $f$ simplemente traslada a cada elemento del disco unitario $S$ dos unidades a la derecha y una unidad hacia arriba, figura 98, es decir: \begin{align*} f(S) & = \{ w\in\mathbb{C} \,:\, |\,w-(2+i)\,|\leq 1 \}\\ & = \overline{B}(2+i,1). \end{align*}
Figura 98: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Esta transformación de la forma $f(z)=z+b$, con $b\in\mathbb{C}$ constante, nos determina una traslación. Consideremos ahora transformaciones de la forma $f(z) = az$, con $a\in\mathbb{C}\setminus\{0\}$. Veamos que dichas transformaciones nos determinan rotaciones y homotecias en el plano complejo.
Observación 26.2. Recordemos que al multiplicar a los números complejos $a=\rho\operatorname{cis}(\alpha)\neq 0$ y $z = r \operatorname{cis}(\theta)$ tenemos: \begin{equation*} az = r\rho \operatorname{cis}(\alpha + \theta) = r \rho e^{i(\alpha + \theta)}, \end{equation*} de donde es claro que la transformación $f(z) = az$ nos devuelve una homotecia desde que al módulo de $z$ se le multiplica por una constante $\rho>0$. Por otra parte, notemos que tenemos una rotación del número complejo $z$ desde que a su argumento $\theta$ se le suma el argumento $\alpha$. Además, dado que el producto de números complejos es conmutativo, es claro que la homotecia y rotación que se le aplica a cada número complejo $z$ se puede realizar en cualquier orden. Notemos que tenemos los siguientes casos:
Si $a = \rho >0$, entonces tenemos que la transformación $f(z) = az$ es simplemente una homotecia por un factor $a$.
Si $\rho = 1$, entonces tenemos que la transformación $f(z) = az = e^{i\alpha} z$ es simplemente una rotación por un ángulo $\alpha$.
Si $\rho>0$, entonces tenemos que la transformación $f(z) = az = \rho e^{i\alpha} z$ es una homotecia por un factor $\rho$ seguida de una rotación por un ángulo $\alpha$.
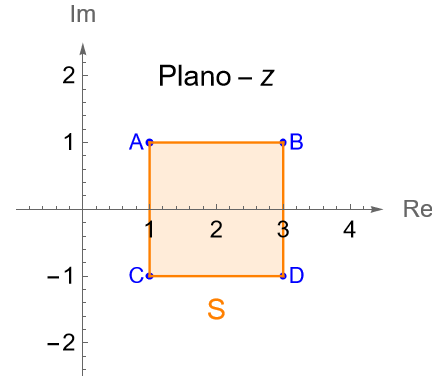
Ejemplo 26.2. Sea $S$ el cuadrado cerrado con centro en el punto $z=2$, cuyos lados son paralelos a los ejes real e imaginario y tienen una longitud $2$, figura 99.
a) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=3z$? b) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=2iz$?
Figura 99: Gráfica del conjunto $S$ en el plano $z$.Gráfica del conjunto $S$ en el plano $z$.
Solución.
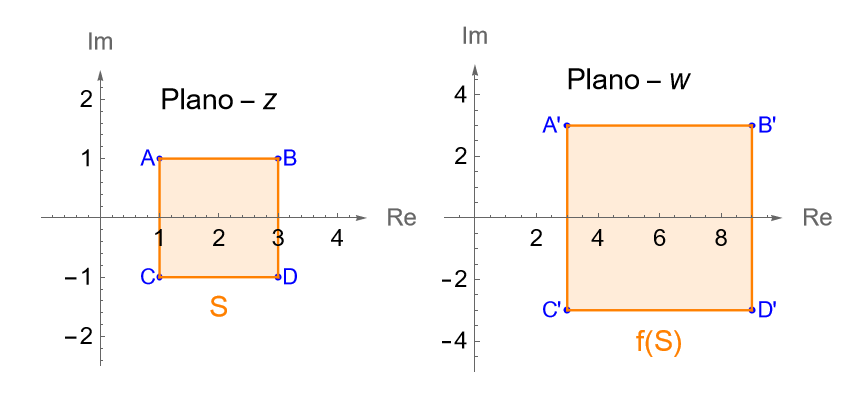
a) De acuerdo con la observación 26.2 tenemos que $a=3>0$ es una constante, por lo que la transformación $f(z)=3z$ corresponde con una homotecia, ya que bajo $f$ la distancia de cada número complejo $w=f(z)$, medida desde el origen, será tres veces la distancia de cada $z\in S$, medida desde el origen, es decir, el módulo de cada número complejo $z\in S$ será triplicado, mientras que su argumento permanecerá sin cambios. Entonces la imagen de $S$ bajo la transformación $f$, es decir, $f(S)$ será otro cuadrado cuyos vértices corresponden con las imágenes de los vértices del cuadrado $S$, figura 100.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 6,\\ f(A) = 3+3i,\\ f(B) = 9+3i,\\ f(C) = 3-3i,\\ f(D) = 9-3i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=6$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 6.
Figura 100: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
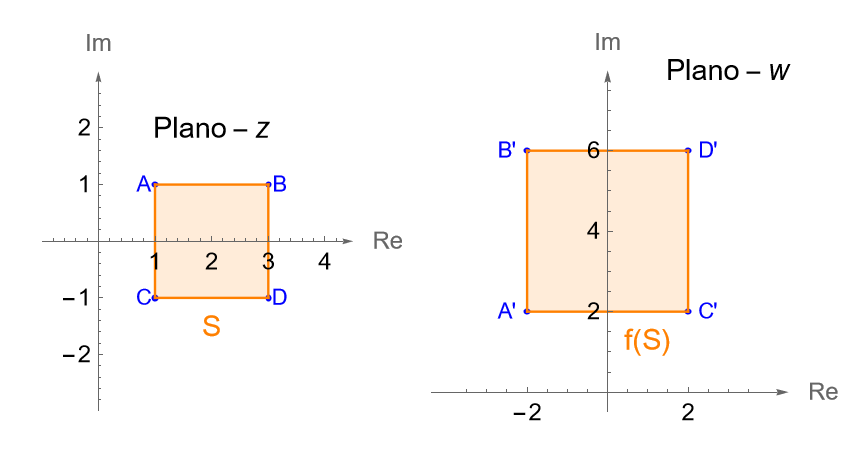
b) Considerando la observación 26.2, tenemos que $a=2i$ es un número complejo cuyo módulo es $r=2$ y su argumento principal es $\alpha = \frac{\pi}{2}$, por lo que la transformación $f(z)=2iz$ corresponde con una homotecia por un factor $r=2$ seguida de una rotación por un ángulo $\alpha=\frac{\pi}{2}$, en sentido contrario a las manecillas del reloj. Entonces, bajo $f$ a cada punto $z\in S$ se le duplicará su módulo y se le sumará $\frac{\pi}{2}$ a su argumento, entonces $f(S)$ será nuevamente un cuadrado cerrado para el cual la distancia del origen a cada $w=f(z)$ será dos veces la distancia del origen a cada $z\in S$ y sus vértices serán las imágenes de los vértices del cuadrado $S$ bajo $f$, figura 101.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 2(2)\operatorname{cis}\left(\frac{\pi}{2} + 0\right) = 4i,\\ f(A) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} + \frac{\pi}{4}\right) = -2+2i,\\ f(B) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{1}{3}\right)\right) = -2+6i,\\ f(C) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} – \frac{\pi}{4}\right) = 2+2i,\\ f(D) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{-1}{3}\right)\right) = 2+6i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=4i$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 4.
Figura 101: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Es posible visualizar las transformaciones de los ejemplos 26.1 y 26.2 en el siguiente applet de GeoGebra https://www.geogebra.org/m/pasmamyw.
Observación 26.3. En conjunto, los ejemplos 26.1 y 26.2 corresponden con transformaciones del tipo $f(z) = az + b$, donde $a,b\in\mathbb{C}$ son dos constantes, y $a\neq 0$ para no trabajar con transformaciones constantes, es decir, transformaciones afines lineales, definición 25.1.
Más aún, de acuerdo con dichos ejemplos, debe ser claro que las transformaciones afines lineales mapean regiones del plano a regiones geométricamente similares. En el caso en que $a=1$ y $b=0$, entonces tenemos a la transformación identidad $\mathbb{I}_\mathbb{C}(z)=z$.
Una pregunta interesante es ¿qué sucede con las transformaciones que no son lineales?, es decir ¿en qué se transforman los subconjuntos de $\mathbb{\mathbb{C}}$ bajo una transformación no lineal? Para responder a esta pregunta analicemos los siguientes ejemplos.
Ejemplo 26.3. Determinemos la imagen de los siguientes conjuntos bajo la transformación inversión, $f(z) = \dfrac{1}{z}$, con $z\neq 0$, $w=f(z)\neq 0$.
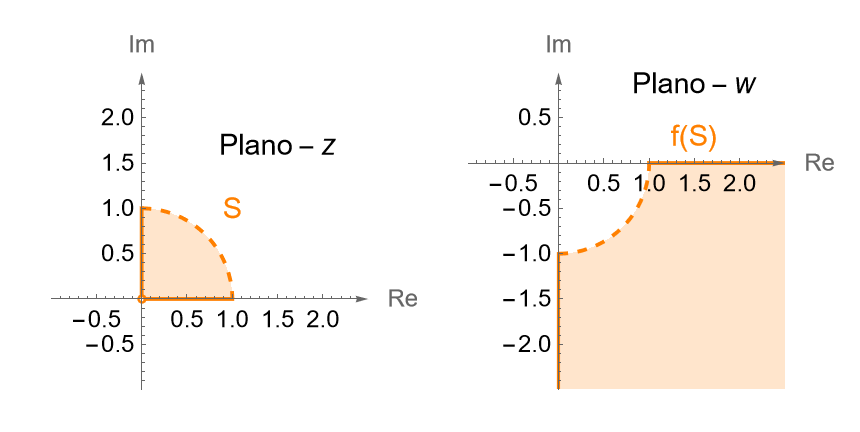
a) $S = \left\{z\in\mathbb{C} \,:\, 0<|\,z\,|<1, 0\leq \operatorname{arg} z \leq \dfrac{\pi}{2}\right\}.$ b) $S = \left\{z\in\mathbb{C} \,:\, 2\leq |\,z\,|, 0\leq \operatorname{arg} z \leq \pi\right\}.$
Solución. De acuerdo con el corolario 4.1 (fórmula de De Moivre), para $z = r\operatorname{cis}(\theta)\neq 0$, con $r=|\,z\,|$ y $\theta = \operatorname{arg} z$, tenemos que: \begin{equation*} f(z) = \frac{1}{z} = r^{-1}\operatorname{cis}(\theta) = \frac{1}{r}\left[\operatorname{cos}(-\theta) + i\,\operatorname{sen}(-\theta) \right]. \end{equation*}
Entonces, para cada $z\neq 0$, se tiene que el módulo de $f(z)$ es el recíproco del módulo de $z$, mientras que el argumento de $f(z)$ será el negativo del argumento de $z$.
a) Notemos que si $z\in S$, entonces $z$ cae en el primer cuadrante dentro de la circunferencia unitaria, incluyendo a los ejes real e imaginario, pero sin considerar a $z=0$, figura 102, ya que:
Si $0<|z|<1$, entonces $z$ cae dentro del disco unitario perforado, es decir $z\in B^*(0,1)$.
Si $0\leq \theta \leq \dfrac{\pi}{2}$, entonces tenemos a los $z$ en el primer cuadrante.
Por lo que bajo $f$, los $z\in S$ serán mapeados, en el plano $w$, fuera del disco unitario y en el cuarto cuadrante, incluyendo a los ejes real e imaginario, pero a partir de los $w$ tales que $|w|>1$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} > 1$ y $-\frac{\pi}{2}\leq -\theta \leq 0$. Entonces: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 1<|\,w\,|, -\frac{\pi}{2}\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
b) Notemos que si $z\in S$, entonces $z$ cae en el primer y segundo cuadrante fuera del disco de radio 2 con centro en el origen, incluyendo a la circunferencia de radio $2$ y a los ejes real e imaginario, figura 103, ya que:
Si $|z|\geq 2$, entonces $z$ cae sobre la circunferencia de radio $2$ y fuera de la misma.
Si $0\leq \theta \leq \pi$, entonces tenemos a los $z$ en el primer y segundo cuadrante.
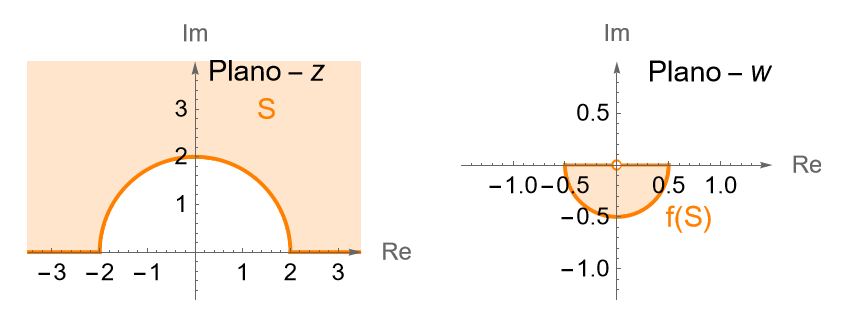
Como el módulo de $z$ crece de $2$ a infinito, entonces bajo $f$ el módulo de $w=f(z)$ decrece de $\dfrac{1}{2}$ a $0$, pero sin llegar a valer $0$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} \leq \dfrac{1}{2}$ y $|\,f(z)\,| >0$ para $z\neq 0$. Por otra parte, como $-\pi \leq – \theta \leq 0$, entonces bajo $f$ los $z$ serán mapeados, en el plano w, en el tercer y cuarto cuadrante en el disco cerrado con centro en el origen y radio $\dfrac{1}{2}$, por lo que: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 0<|\,w\,| \leq \frac{1}{2}, -\pi\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
Figura 102: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Figura 103: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Ejemplo 26.4. Sean $a,b\in\mathbb{R}$ tales que $0<a<b$. Veamos cuál es la imagen de los siguientes conjuntos bajo la transformación inversión, $T(z)=\dfrac{1}{z}$. a) La recta vertical $x = x_0 > 0$ en el plano $z$, es decir $S = \left\{z=x+iy\in\mathbb{C} \,:\, x=x_0>0, y\in\mathbb{R}\right\}$. b) La franja vertical $S = \left\{z=x+iy\in\mathbb{C} \,:\, a\leq x \leq b, y\in\mathbb{R}\right\}$, en el plano $z$. \end{itemize}
Solución.
a) De acuerdo con la observación 25.8 como la recta vertical $x=x_0>0$ no pasa por el origen, entonces la imagen de $S$ bajo $T$ será una circunferencia que pase por el origen en el plano $w$.
Sea $z=x+iy \in S$, entonces tenemos $x = x_0 > 0$ y $y\in\mathbb{R}$. La imagen de $z$ bajo $T$ esta dada por: \begin{equation*} w = u+iv = \frac{1}{z}. \end{equation*}
De acuerdo con (25.7), proposición 25.6, tenemos que: \begin{equation*} u=\frac{x_0}{x_0^2+y^2}, \quad v = -\frac{y}{x_0^2+y^2}, \end{equation*}de donde: \begin{equation*} u^2 +v^2 = \frac{x_0^2 +y^2}{\left(x_0^2+y^2\right)^2} = \frac{1}{x_0^2+y^2} = \frac{u}{x_0}, \end{equation*}por lo que: \begin{align*} &u^2 -\frac{u}{x_0} + v^2 = 0,\\ & \Longleftrightarrow u^2 -\frac{u}{x_0} + \left(-\frac{1}{2x_0}\right)^2 + v^2 = \left(-\frac{1}{2x_0}\right)^2,\\ & \Longleftrightarrow \left( u -\frac{1}{2x_0}\right)^2 + v^2 = \left(\frac{1}{2x_0}\right)^2, \tag{26.1} \end{align*}la cual corresponde con la ecuación de una circunferencia con centro en el punto $w_0 = \dfrac{1}{2x_0} + i0$ y radio $r=\dfrac{1}{2x_0}$, en el plano $w$. Además, notemos que mientras el punto $z=0$ no cae en la recta $S$, el punto $w=0$ sí pertenece a $T(S)$.
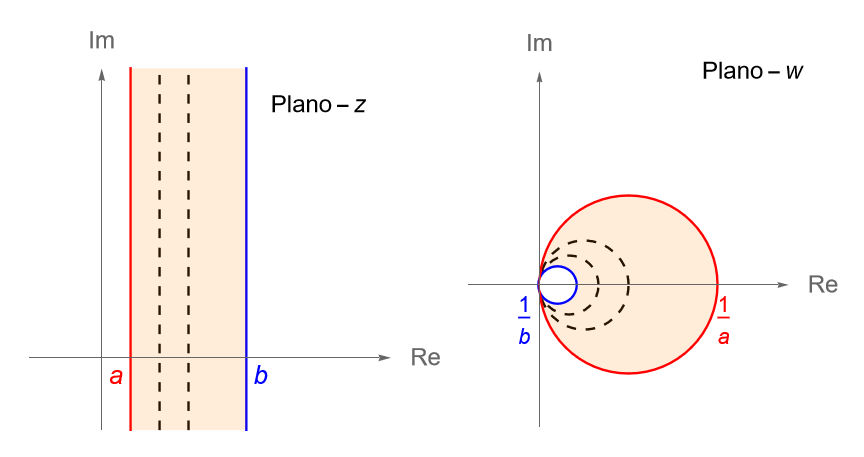
b) Considerando el inciso anterior y la observación 25.8, si $0<a<x_0<b$, entonces la recta vertical $x=x_0$ recorre la franja vertical $S$ en el plano $z$, por lo que la imagen de cada recta vertical $x=x_0$ bajo la transformación inversión corresponderá con una circunferencia dada por (26.1), en el plano $w$. De acuerdo con la figura 104 tenemos que $T(S)$ es la región anular acotada por fuera por la circunferencia centrada en $\left(\dfrac{1}{2a}, 0\right)$ de radio $\dfrac{1}{2a}$ y por dentro por la circunferencia centrada en $\left(\dfrac{1}{2b}, 0\right)$ de radio $\dfrac{1}{2b}$.
Figura 104: Gráfica de la franja vertical $S$ bajo la transformación inversión.
Ejemplo 26.5. Determinemos la imagen de la recta vertical $x=k$, donde $k\in\mathbb{C}$ es una constante, bajo la transformación $f(z)=z^2$.
Solución. Sean $z=x+iy\in\mathbb{C}$ y $w=u+iv = f(z)$, entonces: \begin{equation*} u(x,y)=x^2-y^2, \quad v(x,y)=2xy. \end{equation*}
Dado que $x=k$, entonces los puntos sobre dicha recta vertical son de la forma: \begin{equation*} z=k+iy, \quad y\in\mathbb{R}, \end{equation*}por lo que, la imagen de dicha recta, bajo $f$, es: \begin{equation*} u=k^2-y^2, \quad v=2ky, \quad y\in\mathbb{R} \tag{26.2}. \end{equation*}
Si $k=0$, entonces la imagen de la recta vertical $x=0$, correspondiente con el eje imaginario, está dada por: \begin{equation*} u=-y^2, \quad v=0, \quad y\in\mathbb{R}. \end{equation*}
Es decir, la imagen del eje imaginario, bajo la función $f(z)=z^2$, corresponde con el semieje real negativo.
Por otra parte, si $k\neq 0$, entonces de (26.2) tenemos que: \begin{equation*} y = \frac{v}{2k} \quad \Longrightarrow \quad u = k^2 – \frac{v^2}{4k^2}, \quad \Longrightarrow \quad v^2 = -4k^2(u – k^2), \quad v\in\mathbb{R}. \end{equation*}
Por lo que, para $k\neq0$, la imagen de la recta $x=k$ corresponde con la familia de parábolas con eje paralelo al eje real $u$, con vértice en el punto $\left(k^2,0\right)$, las cuales abren hacia la izquierda y cuya intersección con el eje imaginario $v$ son los puntos $\left(0, \pm 2k^2\right)$. Dado que la imagen de las rectas $x=k$ y $x=-k$ es la misma, entonces ambas rectas, bajo $f$, son mapeadas en la parábola $v^2 = -4k^2(u – k^2)$.
Observación 26.4. De manera general, se puede hacer un análisis para la transformación $f(z)=z^n$, con $n>2$. Si consideramos a $z\neq 0$ tal que $z=re^{i\theta}$ y $w=\rho e^{i\phi}$, entonces: \begin{equation*} w=f(z) \quad \rho e^{i\phi} = r^n e^{in\theta}. \end{equation*}
No es difícil verificar que dicha transformación mapea la región: \begin{equation*} \left\{z=re^{i\theta}\in\mathbb{C}\setminus\{0\} : r\geq 0, \, 0\leq \theta \leq \frac{\pi}{n}\right\}, \end{equation*}en el semiplano superior del plano $w$.
Ejemplo 26.6. Consideremos a la región rectangular: \begin{equation*} S=\left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, 0\leq y\leq \pi\right\} \end{equation*}y determinemos su imagen bajo la transformación $f(z) = e^z$.
Solución. Fijemos a $x_0\in[-1,1]$ y consideremos al segmento de la recta vertical $x=x_0$ que está completamente contenido en $S$. Los puntos de dicho segmento son de la forma $z=x_0+iy$, con $0\leq y \leq \pi$. Para dichos puntos, por la proposición 20.2, tenemos que: \begin{equation*} w = f(z) = e^{x_0+iy} = e^{x_0} e^{iy} = e^{x_0}\left[\operatorname{cos}(y) + i \operatorname{sen}(y)\right], \quad 0\leq y \leq \pi, \end{equation*}de donde se sigue que los puntos $w=e^{x_0}\operatorname{cis}(y)$ tienen módulo $e^{x_0}$ y argumento principal $y$.
Notemos que los puntos $w=f(z)$ están sobre la circunferencia de radio $e^{x_0}$ y centro en el origen. Más aún, como $y\in[0,\pi]$, entonces dichos puntos trazan la semicircunferencia ubicada en el semiplano superior del plano $w$.
Dado que $x_0\in[-1,1]$, entonces $e^{-1}<e^1$, por lo que, los segmentos de las rectas verticales $x=x_0$, contenidos en $S$, corresponden con circunferencias de radio creciente y en conjunto forman la región anular delimitada por las semicircunferencias de radio $e^{-1}$ y $e^1$, respectivamente, amabas centradas en el origen.
De manera análoga, podemos verificar que bajo la transformación $f(z)=e^z$, la región rectangular: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, -\pi\leq y\leq 0\right\}, \end{equation*}es mapeada en la región anular delimitada por las mismas semicircunferencias de radio $e^{-1}$ y $e^1$, con centro en el origen, ubicada en el semiplano inferior del plano $w$.
En general, si consideramos a la región fundamental de la exponencial, figura 78 entrada 20, es decir, la banda infinita: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -\infty <x<\infty, -\pi< y < \pi\right\}, \end{equation*}entonces, dicho conjunto es mapeado bajo la transformación $f(z)=e^z$ en el conjunto: \begin{equation*} \mathbb{C}\setminus{L_{-\pi}} = \left\{z\in\mathbb{C} : |z|>0, -\pi< \operatorname{Arg}(z) < \pi\right\}, \end{equation*}ya que $\lim\limits_{x\to-\infty} e^x =0$ y $\lim\limits_{x\to\infty} e^x = \infty$.
Ejemplo 26.7. Sean $0<a<b$ y $0\leq \theta_1 <\theta_2 \leq \pi$. Determinemos la imagen de la región circular: \begin{equation*} S = \left\{z\in\mathbb{C} : a \leq |z| \leq b,\,\, \theta_1 \leq \operatorname{Arg}(z) \leq \theta_2\right\}, \end{equation*}bajo la transformación $\operatorname{Log}(z)$.
Solución. Notemos que la región $S$ está delimitada por las semirrectas que parten del origen y se forman por los ángulos $0\leq\theta_1$, $\theta_2\leq\pi$ y por los arcos de circunferencia de radio $a$ y $b$ con centro en el origen, como se puede ver en el siguiente applet de GeoGebra https://www.geogebra.org/m/qjzxhefv.
Consideremos a una semirrecta $L$ que parte del origen y está determinada por un ángulo $\theta$ tal que $\theta_1 \leq \theta \leq \theta_2$. Sea $z\in L \cap S$, entonces: \begin{align*} \operatorname{Log}(z) & = \operatorname{ln}|z| +i \operatorname{Arg}(z)\\ & = \operatorname{ln}|\,z\,| +i \theta. \end{align*}
Dado que $0<a\leq |\,z\,| \leq b$, tenemos que $\operatorname{ln}(a) \leq \operatorname{ln}|\,z\,| \leq \operatorname{ln}(b)$, por lo que los puntos $w=\operatorname{Log}(z)$ describen el segmento de la recta horizontal: \begin{equation*} w=u+iv, \quad \operatorname{ln}(a) \leq u \leq \operatorname{ln}(b), \quad v=\theta. \end{equation*}
Como $v\in[\theta_1, \theta_2]$, entonces el segmento de la semirrecta $L$, que está completamente contenido en $S$, cubre a $S$ conforme $v$ varía, por lo que bajo $f$ dicho segmento cubre a la región rectangular en el plano $w$ determinada por los vértices $\left(\operatorname{ln}(a), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_2\right)$ y $\left(\operatorname{ln}(a), \theta_2\right)$.
Observación 26.5. De acuerdo con los ejemplos 26.6 y 26.7, geométricamente debe ser claro que las funciones $\operatorname{Log}(z)$ y $e^z$ biyectan una región anular en una región rectangular y viceversa. Además, la frontera de la región anular es mapeada en la frontera de la región rectangular y viceversa.
Cerraremos esta entrada con el siguiente ejemplo correspondiente con la transformación trigonométrica $\operatorname{sen}(z)$. Por simplicidad consideraremos solo una parte de una banda infinita, pues para la parte restante el planteamiento es el mismo, sin embargo no deja de ser de suma importancia pues en conjunto nos permiten concluir que la función compleja $\operatorname{sen}(z)$ tiene como imagen a todo el plano complejo $\mathbb{C}$.
Ejemplo 26.8. Determinemos la imagen de la semibanda infinita: \begin{equation*} S = \left\{z=x+iy\in\mathbb{C} : -\frac{\pi}{2}\leq x\leq \frac{\pi}{2},\, y\geq 0\right\}, \end{equation*}bajo la transformación $f(z)=\operatorname{sen}(z)$.
Solución. De manera análoga a los ejemplos anteriores, procedemos a cubrir la región del dominio de $f$ con alguna curva simple que bajo $f$ nos permita cubrir la imagen de $S$ y así determinar dicho conjunto.
Sea $0\leq y_0 <\infty$ fijo. Consideramos el segmento de recta horizontal contenido en $S$ dado por: \begin{equation*} y=y_0, \quad -\frac{\pi}{2}\leq x\leq \frac{\pi}{2}. \end{equation*}
Sea $z=x+iy_0$ un punto sobre dicho segmento de recta, entonces, bajo $f$, por la proposición 22.1(10) tenemos que: \begin{align*} w=u+iv & = \operatorname{sen}(x+iy_0)\\ & = \operatorname{sen}(x) \operatorname{cosh}(y_0) + i \operatorname{cos}(x) \operatorname{senh}(y_0), \end{align*}de donde: \begin{equation*} u(x,y) = \operatorname{sen}(x) \operatorname{cosh}(y_0) \quad \text{y} \quad v(x,y) = \operatorname{cos}(x) \operatorname{senh}(y_0). \end{equation*}
Si $y_0=0$, tenemos que $\operatorname{cosh}(0)=1$ y $\operatorname{senh}(0)=0$, por lo que $v=0$ y $u=\operatorname{sen}(x)$, entonces la imagen del intervalo $\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, bajo $f(z)=\operatorname{sen}(z)$, es el intervalo $[-1,1]$.
Supongamos ahora que $y_0>0$. Tenemos que $\operatorname{cosh}(y_0)>0$ y $\operatorname{senh}(y_0)>0$, por lo que: \begin{equation*} \operatorname{sen}(x) = \frac{u}{\operatorname{cosh}(y_0)} \quad \text{y} \quad \operatorname{cos}(x) = \frac{v}{\operatorname{senh}(y_0)} \tag{26.3}. \end{equation*}
Para $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$ tenemos que $\operatorname{cos}(x)\leq 0$, por lo que $v\geq 0$.
Elevando al cuadrado ambas igualdades en (26.3) y sumándolas tenemos que: \begin{equation*} 1 = \operatorname{sen}^2(x) + \operatorname{cos}^2(x) = \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2. \tag{26.4} \end{equation*}
De acuerdo con (26.4), como $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, entonces los puntos $w=u+iv$ trazan la semielipse superior: \begin{equation*} \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2 = 1, \quad v\geq 0. \end{equation*}
Los puntos de intersección de dicha semielipse con el eje real $u$ son $\left(\pm\operatorname{cosh}(y_0), 0\right)$, mientras que el punto intersección con el eje imaginario $v$ es $\left(0,\operatorname{senh}(y_0)\right)$.
Dado que: \begin{align*} \lim\limits_{y_0\to\infty} \operatorname{senh}(y_0) = \infty, &\quad \lim\limits_{y_0\to\infty} \operatorname{cosh}(y_0) = \infty,\\ \lim\limits_{y_0\to 0 } \operatorname{senh}(y_0) =0, &\quad \lim\limits_{y_0\to 0} \operatorname{cosh}(y_0) = 1, \end{align*}y $y_0\in(0,\infty)$, entonces la imagen de las semielipses se encuentra en el semiplano superior $v\geq 0$, del plano $w$, incluyendo el eje real $u$.
Se puede verificar fácilmente, ejercicio 5, que la frontera de $S$ es mapeada en la frontera de $f(S)$, correspondiente con el eje real $u$.
Determina la imagen $f(S)$ bajo la transformación lineal dada. a) $f(z) = 4z$ y $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$. b) $f(z) = iz+i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0 \right\}$. c) $f(z) = -z+2i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $f(z) = iz+2$ y $S=\left\{ z\in\mathbb{C} : |z|\leq 2, 0\leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Sea $f(z)=\dfrac{1}{z}$ la transformación inversión. Para cada conjunto $S$ determina su imagen $f(S)$. a) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 1 \right\}$. b) $S=\left\{ z\in\mathbb{C} : |z|\geq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 3, \dfrac{\pi}{3}\leq \operatorname{Arg}(z)\leq \dfrac{2\pi}{3} \right\}$. d) $S=\left\{ z\in\mathbb{C} : z\neq 0, 0 \leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Encuentra la imagen de $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$ bajo $f(z)=z+\overline{z}$.
Sea $f(z) = z^2$. Determina la imagen $f(S)$ de cada conjunto $S$. a) $S$ es el cuadrado con vértices $(0,0), (1,0), (1,1)$ y $(0,1)$. b) $S=\left\{ z\in\mathbb{C} : 0\leq \operatorname{Im}(z) \leq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $S=\left\{ z\in\mathbb{C} : -2 \leq \operatorname{Re}(z) \leq 0 \right\}$.
Sea $f(z) = \operatorname{sen}(z)$. a) Muestra que bajo $f$ la semirrecta $x=\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\geq 1$, $v = 0$. b) Muestra que bajo $f$ la semirrecta $x=-\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\leq -1$, $v = 0$. c) Concluye que la frontera del conjunto $S$ en el ejemplo 26.8 es mapeada en la drontera del conjunto $f(S)$. d) Sabemos que la elipse: \begin{equation*} \dfrac{x^2}{a^2} + \dfrac{y^2}{b^2} = 1, \end{equation*}con $0<b<a$, tiene focos en los puntos $\left(\pm \sqrt{a^2 – b^2}, 0\right)$. Muestra que todas las elipses del ejemplo 26.8 tienen los mismos focos en los puntos $(\pm 1,0)$.
Sea $S$ la semibanda horizontal: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : x\geq 0, -\frac{\pi}{2} \leq y \leq \frac{\pi}{2} \right\}. \end{equation*}Determina la imagen de $S$ bajo la función $f(z)=\operatorname{senh}(z)$.
Hint: Expresa a $\operatorname{senh}(z)$ en términos de $\operatorname{sen}(z)$.
Sea $w=\rho e^{i\phi}$. Muestra que la transformación $w=\dfrac{i}{z}$ mapea la hipérbola $x^2-y^2=1$ en la lemniscata $\rho^2 = 2 \operatorname{cos}(2\phi)$.
Determina una transformación que rote a la elipse $x^2+xy+y^2=2$, en el sentido de las manecillas del reloj, tal que su ecuación se reduzca a su forma canónica. Obtén la longitud de su semieje mayor y menor.
Hint: Supón que la transformación es de la forma $w=\rho e^{i\phi}$. Determina un ángulo $\alpha$ tal que el coeficiente de $uv$ en la imagen de la curva es cero.
Más adelante…
En esta entrada hemos abordado, a manera de ejemplos, el estudio de las funciones complejas como transformaciones del plano complejo, esto con el objetivo de dar una interpretación geométrica del comportamiento de las funciones complejas, ya que como mencionamos antes, visualizar la gráfica de tales funciones resulta imposible. Debe ser claro que la propuesta de esta entrada es solo una de las distintas alternativas conocidas para el estudio de la parte gráfica de una función compleja, sin embargo hay otras alternativas que pueden ser de utilidad para la comprensión del comportamiento geométrico de estas funciones, por lo que se recomienda consultar estas otras propuestas.
Con esta entrada finalizamos la segunda unidad del curso. En la siguiente entrada es la primera de la tercera unidad del curso, correspondiente con el tema de series de números complejos, en la cual estudiaremos algunos de los conceptos básicos así como algunas de las propiedades más importantes de estos objetos matemáticos, mediante los cuales probaremos una serie de resultados que serán de utilidad para caracterizar a las funciones complejas a través de dichos objetos.
En esta entrada, continuaremos con el estudio de las cónicas, pero en esta ocasión, vamos a encontrar su centro y ejes, a partir de dos grupos de isometrías que ya son familiares para nosotros, las rotaciones y traslaciones y usando otro tema que ya ha sido estudiado con anterioridad, la equivalencia de polinomios y reducción de términos lineales y cuadráticos.
Encontrando el centro de las traslaciones
Para cualquier vector $h \in \mathbb R^2$, consideremos la traslación $g(x)=x+h$ y veamos cómo se escribe el polinomio $P \circ g$ con $P(x)=x*Ax+k*x+f$:
La pregunta ahora es, ¿hay una forma de encontrar el centro de la traslación g a partir de esta expresión? Lo que, por muy extraño que parezca, es cierto, pero, ¿cómo?
Enunciemos unos lemas que nos ayudarán a encontrar la respuesta a la pregunta anterior.
Lema 4.4: Dadas $A$ y $B$ dos matrices que se puedan multiplicar, se cumple que $(AB)^T=B^TA^T$
Lema 4.5: Si tenemos una matriz simétrica $A$ (recordemos que una matriz $A$ es simétrica si $A=A^T$), entonces, para todo par de vectores $x,y$ en $\mathbb R$, se cumple que $x*Ay=Ax*y$
Demostración
Sean $x,y$ vectores, recordemos que $x=x^T$ y que $y=y^T$, por esto y el lema anterior, tenemos que:
Donde $(2Ah+k)*x$ es la parte lineal de esta composición por lo que, si podemos encontrar una $h \in \mathbb R^2$ que cumpla que $2Ah+k=0$, entonces habremos encontrado una traslación que no contenga la parte lineal del polinomio. Si esta $h$ existe, es el centro de la traslación (en el caso de este capítulo, estaremos hablando de traslaciones de cónicas).
Lo anterior lo podemos resumir en el siguiente lema:
Lema 4.6: Sea $P(x)=x*Ax+k*x+f$ un polinomio cuadrático (es decir que $A=A^T$) tal que $det(A)\neq 0$. Si definimos $c:=-\frac{A^{-1}}{k}$, $c$ es el centro de la curva asociada al polinomio $P$, $C(P)$ donde:
\begin{equation}P(x+c)=x*Ax+P(c)\end{equation}
Como buena conclusión de este apartado, observa que las traslaciones afectan la parte lineal de los polinomios cuadráticos.
Encontrando los ejes de las rotaciones
Ahora considera la rotación $g(x)=Bx$ con $B$ en el general lineal de $\mathbb R^2$, es decir, $B \in Gl(2)$ y $P$ el polinomio cuadrático general. Entonces:
La pregunta en este caso es, ¿existe una forma de encontrar los ejes de la rotación a partir de esta expresión? La respuesta es sí.
A diferencia de las traslaciones, en las que se afectaba la parte lineal, para las rotaciones nos vamos a enfocar en la parte cuadrática. Debemos encontrar una manera de simplificar la expresión $B^TAB$.
Considera a $B$ como matriz ortogonal $(B \in O(2))$, esto implica que $B^TAB=B^{-1}AB$ que es la matriz que expresa la función $A$ en la base de las columnas de $B$.
Finalmente, toma a $u,v$ columnas de $B$ que forman una base ortonormal y que $A$ alarga estas columnas en factores $\lambda, \mu$, es decir, que $Au=\lambda u$ y $Av=\mu v$. Entonces, las siguientes igualdades se cumplen:
En este apartado, vamos a continuar con el estudio de las isometrías que se empezaron a analizar en la unidad anterior, las rotaciones y traslaciones.
Encontrando un punto fijo
Recuerda que ya definimos la rotación de un ángulo $\theta$ con centro en $c$ ($\rho_{\theta,c}$), en función de la traslación de $c$ al origen $\tau_c$ y la rotación de $\theta$ en el origen $\rho_\theta$, como: $\rho_{\theta,c}=\tau_c\circ \rho_\theta \circ \tau_{-c}$. Usando matrices, esta expresión se convierte en:
Observa que esta expresión es de la forma $Ax+b$ con $b$ constante, por lo que $\rho_{\theta,c} \in Iso^+ (2).
Por otro lado, si el problema se invierte y ahora queremos ver que una función $f(x)=Ax+b \in Iso^+ (2)$ es la rotación de una función en algún centro, debemos encontrar un punto fijo $c$ para el que $f(c)=c$. Es decir:
\begin{equation}c=Ac+b\end{equation}
\begin{equation}c-Ac=b\end{equation}
Esto quiere decir, que debemos encontrar una solución a la ecuación $x-Ax=b$, que se puede reescribir como:
\begin{equation}(I-A)x=b\end{equation}
Por lo que has visto en los capítulos anteriores, esperamos que, al ver esta expresión, hayas recordado que este sistema tiene solución única si y solo si su determinante es distinto de cero, donde su determinante es:
Donde puedes comprobar que $det(I-R_\theta)=2(1-\cos(\theta))$.
Lo anterior implica que, si $\theta\neq 0$, entonces $det(I-R_\theta)\neq 0)$, lo que resulta en una solución única para el sistema resultante que es $A=R_\theta$ el punto fijo que estábamos buscando. Finalmente, podemos concluir que $f$ es una rotación.
Centro de rotación para composición de rotaciones
Lo anterior implica el siguiente corolario:
Corolario A: La composición de rotaciones es una nueva rotación.
La nueva pregunta que surge es, ¿cuál es el centro de rotación de la composición de rotaciones? Las siguientes líneas, las dedicaremos a encontrar este nuevo centro de rotación.
Considera $\rho_{\alpha,a}$ y $\rho_{\beta,b}$ las rotaciones de ángulos $\alpha$ y $beta$ y centros en $a$ y $b$ respectivamente. La composición de estas dos rotaciones tiene un ángulo $\alpha + \beta$, pero su centro depende del orden de composición.
Para encontrar el centro de rotación, de forma geométrica, para $\rho_{\beta,b} \circ \rho_{\alpha,a}$, se trazan las líneas que van de $a$ a $b$, después, midiendo los ángulos a partir de esta recta, la línea que pasa por $a$ con ángulo $-\frac{\alpha}{2}$ y la que pasa por $b$ con ángulo $\frac{\beta}{2}$. La intersección de las últimas dos líneas es el nuevo centro de rotación $c$.
Observa que, para la composición $\rho_{\alpha,a} \circ \rho_{\beta,b}$, su nuevo centro de rotación es el reflejado de $c$ respecto de la línea que pasa por $a$ y $b$.
Tarea moral
Verifica que, efectivamente, se cumple que $det(I-R_\theta)=2(1-\cos(\theta))$.
Demuestra el Corolario A.
Como veremos más delante, las homotecias, son transformaciones de la forma $f(x)=kx+b$ donde $k\neq 0$ se conoce como el factor de expansión. Demuestra que las homotecias con $k\neq 1$ tienen un punto fijo (este punto fijo se llama centro de expansión).
Más adelante…
En la siguiente entrada de esta unidad, hablaremos sobre otro tipo de isometrías que ya estudiamos en la unidad anterior, las reflexiones.
En la entrada anterior definimos las transformaciones ortogonales y probamos algunas de sus propiedades relacionadas con el producto interior, norma y la transformación adjunta. Vimos también que el conjunto de todas las transformaciones ortogonales de un espacio euclideano $V$ forma un grupo $O(V)$ bajo composición.
En esta entrada queremos entender mucho mejor dicho grupo. El resultado principal que probaremos nos dirá exactamente cómo son todas las posibles transformaciones ortogonales en un espacio euclideano (que podemos pensar que es $\mathbb{R}^n$). Para llegar a este punto, comenzaremos con algunos resultados auxiliares y luego con un lema que nos ayudará a entender a las transformaciones ortogonales en dimensión $2$. Aprovecharemos este lema para probar el resultado para cualquier dimensión.
El lema de los subespacios estables
Lo primero que veremos es que las transformaciones ortogonales preservan completamente los subespacios estables, así como sus espacios ortogonales. Este es el resultado que nos permitirá un poco más adelante trabajar inductivamente.
Lema. Sean $V$ un espacio euclidiano, $T\in O(V)$ y $W$ un subespacio de $V$ estable bajo $T$.
Se tiene que $T(W)=W$ y $T(W^\bot)=W^\bot$.
Se tiene que $T|_W\in O(W)$ y $T|_{W^\bot}\in W^\bot$.
Demostración. 1. Como $T(W)\subseteq W$ y $T|_W$ es inyectiva (pues $T$ es inyectiva en $V$), se sigue que $T|_W:W\to W$ es suprayectiva y por lo tanto $T(W)=W$. Veamos ahora que $W^\bot$ también es estable bajo $T$. Tomemos $x\in W^\bot$ y $y\in W$. Queremos demostrar que $T(x)\in W^\bot$, es decir, que $\langle T(x),y \rangle=0$. Como $T$ es ortogonal, entonces $T^*=T^{-1}$ y por lo tanto $$\langle T(x),y \rangle=\langle x,T^{-1}(y) \rangle.$$
Como $T|_W:W\to W$ es biyectiva, se tiene que $W$ es estable bajo $T^{-1}$. Entonces $T^{-1}(y)\in W$, y como $x\in W^\bot$, entonces $\langle x,T^{-1}(y) \rangle=0$. Por lo tanto $\langle T(x),y \rangle=0$. Esto muestra que $W^\bot$ es estable bajo $T$ y por la primer parte de este inciso, llegamos a $T(W^\bot)=W^\bot$.
2. Para todo $x\in W$ se tiene que $$||T|_W(x)||=||T(x)||=||x||,$$ lo que significa que $T|_W\in O(W)$. De manera análoga se tiene que $T_{W^\bot}\in O(W^\bot)$.
$\square$
El lema de la invarianza de una recta o un plano
Para poder aplicar el lema de la sección anterior, tendremos que poder encontrar subespacios estables. El siguiente lema nos dice que siempre podemos encontrar subespacios estables en espacios euclideanos.
Lema. Sea $V$ un espacio euclidiano y $T$ una transformación lineal sobre $V$. Entonces existe una recta (subespacio de dimensión $1$) o un plano (subespacio de dimensión $2$) en $V$ estable bajo $T$.
Demostración. El polinomio mínimo de $T$ es un polinomio $\mu_T(x)$ con coeficientes reales. Si tiene una raíz real, se sigue que $T$ tiene un eigenvalor y por consiguiente, la recta generada por un eigenvector es estable bajo $T$.
Ahora supongamos que $\mu_T(x)$ no tiene raíces reales. Sea $z$ una raíz compeja de $\mu_T(x)$, que existe por el teorema fundamental del álgebra. Como $\mu_T(x)$ tiene coeficientes reales, entonces $\overline{z}$ también es raíz de $\mu_T(x)$.Por lo tanto, $Q(x)=(x-z)(x-\overline{z})$ divide a $\mu_T(x)$.
Es imposible que $Q(T)$ sea una matriz invertible, pues de serlo, tendríamos que $\frac{\mu_T}{Q}(x)$ sería un polinomio de grado más chico que $\mu_T(x)$ y anularía a $T$. Esto nos dice que existe $x\in V$ distinto de $0$ tal que $Q(T)(x)=0$. Si $Q(x)=x^2+ax+b$, esto se traduce a $T^2(x)+aT(x)+bx=0$. De aquí, se tiene que $x$ y $T(x)$ generan un plano estable bajo $T$.
$\square$
Las transformaciones ortogonales en dimensión $2$
Los lemas de las secciones anteriores nos permitirán ir partiendo a un espacio euclideano $T$ en «cachitos estables» ya sea de dimensión $1$ o de dimensión $2$. En los de dimensión $1$ ya sabemos cómo debe verse una matriz que represente a $T$: simplemente corresponden a eigenvectores y entonces consistirán en reescalamientos (que deben de ser por factor $1$ ó $-1$ para tener ortogonalidad). Pero, ¿cómo se verá matricialmente la transformación $T$ en subespacios estables de dimensión $2$ que no se puedan descomponer más? Esto es lo que nos responde el siguiente lema.
Lema. Sea $V$ un espacio euclidiano de dimensión $2$ y $T\in O(V)$ sin eigenvalores reales. Entonces existe una base ortonormal de $V$ tal que la matriz asociada a $T$ en dicha base es de la forma $$R_\theta=\begin{pmatrix} \cos\theta & -\sin\theta\\ \sin\theta & \cos\theta\end{pmatrix}.$$
Demostración. Sea $\beta=\{e_1,e_2\}$ una base ortonormal de $V$ y escribimos $T(e_1)=ae_1+be_2$ para algunos números reales $a,b$. Como $$a^2+b^2=||T(e_1)||^2=||e_1||^2=1,$$ entonces podemos encontrar un número real $\theta$ tal que $(a,b)=(\cos\theta,\sin\theta)$.
Para que $\langle T(e_1), T(e_2)\rangle = 0$, necesitamos que exista un $c$ tal que $T(e_2)=c(-\sin\theta e_1+\cos \theta e_2)$. Finalmente, ya que $$||T(e_2)||=||e_2||=1, $$ debemos tener $|c|=1$ y así $c\in \{-1,1\}$.
El caso $c=-1$ podemos descartarlo pues la matriz que representa a $T$ en la base $\beta$ sería $$\begin{pmatrix} \cos \theta & \sin \theta\\ \sin \theta & -\cos\theta\end{pmatrix},$$ cuyo polinomio caracterísitco es $x^2-1$ y por lo tanto tiene a $1$ como eigenvalor, lo cual no entra en nuestras hipótesis. Así, $c=1$ y por lo tanto la matriz que representa a $T$ en la base $\beta$ es $$\begin{pmatrix} \cos\theta & -\sin\theta\\ \sin\theta & \cos\theta\end{pmatrix},$$
como queríamos.
$\square$
El teorema de clasificación
Con lo visto hasta ahora, ya estamos listos para demostrar el teorema fundamental de clasificación de transformaciones lineales ortogonales de un espacio euclidiano.
Teorema (clasificación de ortogonales). Sea $V$ un espacio euclidiano y $T\in O(V)$. Entonces podemos encontrar una base ortonormal $\beta$ de $V$ tal que la matriz asociada a $T$ con respecto a la base $\beta$ es de la forma \begin{equation}\label{forma} A=\begin{pmatrix} I_p & 0 & 0 & \dots & 0\\ 0 & -I_q & 0 & \dots & 0\\ 0 & 0 & R_{\theta_1} & \dots & 0\\ \vdots & \vdots & \vdots &\ddots & \vdots\\ 0 & 0 & 0 &\dots & R_{\theta_k} \end{pmatrix},\end{equation} donde $\theta_1,\dots, \theta_k$ son números reales y $$R_\theta=\begin{pmatrix} \cos\theta & -\sin\theta\\ \sin\theta & \cos\theta \end{pmatrix}.$$
Demostración. Procederemos por inducción sobre $\dim V$. Si $\dim V=1$, entonces ya terminamos, pues se tendría que $T=\pm id$ (esto quedó de tarea moral en la entrada anterior).
Supongamos que el resultado se satisface para todos los espacios euclideanos de dimensión a lo más $n-1$. Tomemos $V$ un espacio euclideano de dimensión $n$ y $T$ una transformación ortogonal de $V$. Por el lema de la invarianza de una recta o un plano, o bien $V$ tiene una recta estable bajo $T$, o bien un plano estable bajo $T$.
El caso en que $T$ tiene una recta estable bajo $T$ corresponde a que $T$ tiene un eigenvalor real $t$ con eigenvector, digamos, $e_1$. Entonces $$|t|||e_1||=||te_1||=||T(e_1)||=||e_1||,$$ por lo cual $t\in\{-1,1\}$. Sea $W$ la recta generada por $e_1$.
Tenemos que $V=W\oplus W^\bot$. Por el lema de subespacios estables, $T(W)=W$ y $T|_{W^\bot}$ es ortogonal de $W^\bot$. Por hipótesis inductiva, $W^\bot$ tiene una base ortonormal $\{e_2,\dots , e_n\}$ tal que la matriz asociada a dicha base y restringida a $W^\bot$ es de la forma \eqref{forma}. Añadiendo el vector $\frac{e_1}{||e_1||}$ se añade un $1$ o $-1$ en la diagonal, así que, posiblemente permutando la base ortonormal resultante $\{\frac{e_1}{||e_1||},e_2,\dots ,e_n\}$ de $V$ obtenemos una base ortonormal tal que la matriz asociada a $T$ con respecto a esta base es de la forma \eqref{forma}.
Ahora supongamos que $T$ no tiene valores propios reales, es decir, que estamos en el caso de tener un plano estable bajo $T$. Como $T$ es ortogonal, el espacio $W^\bot$ también es estable bajo $T$, y las restricciones de $T$ a $W$ y $W^\bot$ son transformaciones otogonales sobre estos espacios. Por hipótesis inductiva, $W^\bot$ tiene una base ortonormal $\{e_3,\dots,e_n\}$ tal que la matriz asociada a $T|_{W^\bot}$ con respecto a esta base es una matriz diagonal de bloques de la forma $R_{\theta_i}$. Por el lema de transformaciones ortogonales en dimensión $2$, el subespacio $W$ tiene una base ortonormla $\{e_1,e_2\}$ tal que la matriz asociada a $T|_W$ con respecto a esta base es de la forma $R_\theta$. Como $V=W\oplus W^\bot$, entonces la matriz asociada a $T$ con respecto a la base $\{e_1,\dots, e_n\}$ es de la forma \eqref{forma}, con lo cual concluimos con la prueba deseada.
$\square$
También podemos enunciar el teorema anterior en términos de matrices:
Observación. El determinante de la matriz $$\begin{pmatrix} I_p & 0 & 0 & \dots & 0\\ 0 & -I_q & 0 & \dots & 0\\ 0 & 0 & R_{\theta_1} & \dots & 0\\ \vdots & \vdots & \vdots &\ddots & \vdots\\ 0 & 0 & 0 &\dots & R_{\theta_k} \end{pmatrix}$$ es $(-1)^q\in\{1,-1\}$ (estamos usando $\det R_{\theta_i}=1$ para $1\leq i\leq k$). Se sigue que $$\det T\in\{-1,1\}$$ para cualquier $T\in O(V)$.
Más adelante…
Por lo platicado en esta entrada, ya podemos decir cómo es cualquier transformación ortogonal, y no es tan complicado: simplemente en alguna base apropiada, se rota en pares de coordenadas, o bien se refleja en coordenadas, o bien no se hace nada en alguna coordenada (o una combinación de estas cosas). Todo esto intuitivamente deja fijas las normas y el teorema de clasificación nos dice que si se fijan normas entonces debe ser así. Por ello, podemos pensar a las transformaciones ortonormales como «sencillas» o por lo menos «entendibles».
Aprovecharemos esto en el siguiente tema, pues enunciaremos el teorema espectral real, que nos dice que las transformaciones simétricas se entienden muy bien a partir de las ortogonales y de las diagonales. Así, las transformaciones simétricas también serán «entendibles». Finalmente, con el teorema de descomposición polar llevaremos este entendimiento a todas, todas las matrices.
Tarea moral
Verifica que, en efecto, las matrices $R_\theta$ de la entrada tienen determinante igual a $1$.
Sea $V$ un espacio euclidiano y $T:V\to V$ una transformación lineal. Demuestra que $T$ es ortogonal si y sólo si $||T(x)||=||x||$ para los vectores $x$ de norma $1$.
Encuentra la matriz de rotación de ángulo $\frac{\pi}{3}$ alrededor de la recta generada por el vector $(1,1,1)$.
Describe todas las matrices en $M_3(\mathbb{R})$ que son simultaneamente ortogonales y diagonales.
Describe todas las matrices en $M_3(\mathbb{R})$ que sean simultáneamente ortogonales y triangulares superiores.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»