Introducción
En la entrada 8 definimos el concepto de sucesión de números complejos y obtuvimos algunos resultados sobre dichos objetos matemáticos. Como vimos, muchas de las definiciones y resultados son similares a los que ya conocíamos sobre sucesiones de números reales con los que ya estábamos familiarizados.
Por otra parte, en la entrada anterior definimos el concepto de serie de números complejos y vimos que para determinar su comportamiento, así como muchas de sus propiedades, requerimos de los resultados de sucesiones de números complejos.
En ésta entrada definiremos el concepto de sucesiones de funciones y series de funciones, desde el enfoque complejo. Al igual que con las sucesiones numéricas, intuimos que para las sucesiones de funciones debe haber una noción de convergencia. Sin embargo, veremos que para el caso de sucesiones de funciones, podemos tener distintos tipos de convergencia, por lo que requeriremos ser muy meticulosos al trabajar con ellas.
Definición 28.1. (Sucesión de funciones.)
Sea $S\subset\mathbb{C}$. Consideremos al conjunto de todas las funciones $f:S \to \mathbb{C}$, es decir, $\mathcal{F}(S)$. Una sucesión de funciones en $S$ es una función $F:\mathbb{N} \to \mathcal{F}$, que a cada $n\in\mathbb{N}$ asigna una función $f\in\mathcal{F}(S)$, es decir, $F(n) = f_n(z)$, lo cual denotamos como $\left\{f_n\right\}_{n\geq 0}$.
Procedemos a definir el primer tipo de convergencia para una sucesión de funciones, el cual es en esencia el más elemental.
Definición 28.2. (Convergencia puntual de una sucesión de funciones.)
Sean $S\subset\mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$. Diremos que la sucesión $\left\{f_n\right\}_{n\geq 0}$ converge puntualmente en $S$ a una función $f: S\to \mathbb{C}$ si: \begin{equation*} \lim_{n\to\infty} f_n(z) = f(z), \end{equation*} para todo $z\in S$. Es decir, si para todo $\varepsilon>0$ y todo $z\in S$ existe $N\in\mathbb{N}$, que depende de $\varepsilon$ y de $z$, tal que si $n \geq N$, entonces:
\begin{equation*}
\left|f_n(z) – f(z)\right| < \varepsilon.
\end{equation*} A la función $f$ que satisface lo anterior la llamaremos el límite puntual de $\left\{f_n\right\}_{n\geq 0}$.
Observación 28.1.
La convergencia puntual es simplemente la convergencia de la sucesión de números complejos $\left\{f_n(z)\right\}_{n\geq 0}$ al número complejo $f(z)$, para cada $z\in S$
Definición 28.3. (Convergencia uniforme de una sucesión de funciones.)
Sean $S\subset\mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$. Diremos que la sucesión $\left\{f_n\right\}_{n\geq 0}$ converge uniformemente en $S$ a una función $f: S\to \mathbb{C}$ si para todo $\varepsilon>0$ existe $N\in\mathbb{N}$, que depende únicamente de $\varepsilon$, tal que si $n \geq N$, entonces:
\begin{equation*}
\left|f_n(z) – f(z)\right| < \varepsilon,
\end{equation*} para todo $z\in S$.
A la función $f$ que satisface lo anterior la llamaremos el límite uniforme de $\left\{f_n\right\}_{n\geq 0}$.
Observación 28.2.
Una vez especificado el tipo de convergencia, utilizaremos la notación $f_n \to f$ para denotar la convergencia de una sucesión de funciones $\left\{f_n\right\}_{n\geq 0}$ a una función $f$.
Ejemplo 28.1.
Sea $f_n : B(0,1) \to \mathbb{C}$ dada por $f_n(z) = z^n$, con $n\in\mathbb{N}^+$. Consideremos a la función $f: B(0,1) \to \mathbb{C}$ dada por $f(z) = 0$. Veamos que la sucesión de funciones $\left\{f_n\right\}_{n\geq 1}$ cumple lo siguiente.
a) $f_n \to f$ puntualmente en $B(0,1)$.
b) $f_n \not \to f$ uniformemente en $B(0,1)$.
c) $f_n \to f$ uniformemente en $\overline{B}(0,r)$, con $0<r<1$.
Solución.
a) Si $z\in B(0,1)$, entonces $|z|<1$. Es claro que para $z =0$ el resultado es inmediato, por lo que supondremos que $0<|z|<1$. Notemos que bajo esta condición se cumple que $\operatorname{ln}|z| < 0$.
Sea $\varepsilon>0$ y $0<|z|<1$. Elegimos $N\in \mathbb{N}^+$ tal que $N > \dfrac{\operatorname{ln}(\varepsilon)}{\operatorname{ln}|z|}$, entonces para todo $n\geq N$ tenemos que:
\begin{equation*}
|f_n(z) -f(z)| = |z^n – 0| = |z|^n \leq |z|^N < \varepsilon,
\end{equation*} es decir, $f_n \to f$ puntualmente en $B(0,1)$.
b) Procedemos por contradicción. Supongamos que $f_n \to f$ uniformemente en $B(0,1)$.
Sea $\varepsilon = \dfrac{1}{3} > 0$, entonces existe $N\in\mathbb{N}^+$ tal que $|z^N| < \varepsilon$, para todo $z\in B(0,1)$.
Notemos que $z = 2^{-1/N} \in B(0,1)$, pero:
\begin{equation*}
|z^N| = \left|\left(\frac{1}{2^{1/N}}\right)^N\right| = \frac{1}{2} > \frac{1}{3}.
\end{equation*}
Por lo que $f_n \not \to f$ uniformemente en $B(0,1)$.
c) Sea $0<r<1$. En tal caso sabemos que $\lim\limits_{n\to\infty} r^n = 0$.
Sea $\varepsilon>0$. De acuerdo con lo anterior tenemos que existe $N\in\mathbb{N}$ tal que si $n\geq N$, entonces $|r^n – 0| = r^n < \varepsilon$.
Sea $z\in\overline{B}(0,r)$, entonces:
\begin{equation*}
|f_n(z) -f(z)| = |z^n – 0| = |z|^n \leq r^n < \varepsilon,
\end{equation*} por lo que $f_n \to f$ uniformemente en $\overline{B}(0,r)$, con $0<r<1$.
Ejemplo 28.2.
Para cada $n\in\mathbb{N}$ definimos a la función $f_n : \mathbb{C} \to \mathbb{C}$ como:
\begin{equation*}
f_n(z) = \frac{z+in}{n+1}.
\end{equation*}
Veamos que la sucesión converge puntualmente a la función constante $f(z) = i$, pero que la sucesión no converge uniformemente a $f$.
Solución. Notemos que para cualquier $z\in\mathbb{C}$ se cumple que:
\begin{equation*}
\lim_{n\to\infty} f_n(z) = \lim_{n\to\infty} \frac{z+in}{n+1} = \lim_{n\to\infty} \frac{\dfrac{z}{n} + i}{1 + \dfrac{1}{n}} = i,
\end{equation*} de donde se sigue la sucesión $\left\{f_n\right\}_{n\geq 0}$ converge puntualmente en $\mathbb{C}$ a la función constante $f(z) = i$.
Notemos que para todo $n\in\mathbb{N}$ se cumple que:
\begin{equation*}
f_n(-in) = \frac{-in+in}{n+1} = 0, \quad f(-in) = i,
\end{equation*} por lo que:
\begin{equation*}
f_n(-in) – f(-in) = -i, \quad \forall n\in\mathbb{N}.
\end{equation*}
Entonces, no existe $n\in\mathbb{N}$ tal que $| f_n(z) – f(z)| < 1$ para todo $z\in\mathbb{C}$, por lo que la sucesión $\left\{f_n\right\}_{n\geq 0}$ no converge uniformemente a $f(z)=i$ en $\mathbb{C}$.
Observación 28.3.
Notemos que existe una sutil diferencia entre las definiciones de convergencia puntual y convergencia uniforme. Si $f_n \to f$ puntualmente en $S$, dado $\varepsilon>0$, para cada $z\in S$ existe un $N_{z} \in \mathbb{N}$ tal que si $n\geq N_z$, entonces $\left|f_n(z) – f(z)\right| < \varepsilon$. Lo anterior nos dice que es posible que el valor de $N_z$ sea diferente para cada valor de $z$.
Por otra parte, si $f_n \to f$ uniformemente, entonces el valor de $N\in\mathbb{N}$ se puede elegir de forma que sea el mismo para todo $z\in S$. Esta condición es mucho más fuerte que la primera, por lo que la convergencia uniforme implica la convergencia puntual, pero el recíproco no es cierto.
Entonces, la diferencia clave entre ambos tipos de convergencia radica en dónde consideramos la expresión «para todo $z\in S$» en las definiciones. Para la convergencia uniforme requerimos que la diferencia entre $f_n(z)$ y $f(z)$ sea arbitrariamente pequeña de forma simultánea para todo $z\in S$.
Observación 28.4.
Si definimos $M_n = \operatorname{max}\left\{\left|f_n(z) – f(z)\right| : z \in S\right\}$, entonces una definición equivalente para la convergencia uniforme es:
\begin{equation*}
f_n \to f \,\,\, \text{uniformemente en S}\quad \Longleftrightarrow \quad \lim_{n\to\infty} M_n = 0.
\end{equation*}
En caso de que no se alcance el máximo, basta con tomar $M_n = \operatorname{sup}\left\{\left|f_n(z) – f(z)\right| : z \in S\right\}$.
Ejemplo 28.3.
Sean $x\in[0, 1]$, $n\in\mathbb{N}^+$ y $f(x) = 0$. Consideremos a la sucesión de funciones reales $\{f_n\}_{n\geq 1}$, dada por:
\begin{equation*}
f_n(x) = \frac{2nx}{1+n^2 x^2}.
\end{equation*}
Veamos que:
a) $f_n \to f$ puntualmente en $[0,1]$.
b) $f_n \not \to f$ uniformemente en $[0,1]$.
Solución. Primeramente, podemos visualizar el comportamiento de la sucesión $\{f_n\}_{n\geq 1}$ en el siguiente applet de GeoGebra https://www.geogebra.org/m/shs5mw8b.
a) Es claro que si $x=0$, entonces para todo $n\in\mathbb{N}^+$ se cumple que $f_n(0) = 0$ y en tal caso $f_n \to f$ puntualmente.
Supongamos que $x \neq 0$, entonces $x \in (0,1]$ y en tal caso:
\begin{equation*}
\lim_{n \to \infty} f_n(x) = \lim_{n \to \infty} \frac{2nx}{1+n^2 x^2} = \lim_{n \to \infty} \frac{1}{n} \left(\dfrac{2x}{\frac{1}{n^2}+ x^2}\right) = 0.
\end{equation*}
Por lo que, para toda $x \in [0,1]$, $f_n \to f$ puntualmente.
Entonces, para cada $x\in[0,1]$, la sucesión de números complejos $\{f_n(x)\}_{n\geq 1}$ converge a $0$, como se puede visualizar en el applet mencionado previamente.
b) Dado que para cada $n\in\mathbb{N}^+$ la función $f_n : [0, 1] \to \mathbb{R}$ es continua y $[0, 1] \subset \mathbb{R}$ es un conjunto compacto, entonces, proposición 10.10, la función $f_n$ alcanza sus valores mínimo y máximo (absolutos) en $[0, 1]$. Sea:\begin{align*}
M_n &= \underset{x \in[0,1]}{\max} \left| f_n(x) – f(x) \right|\\
& = \underset{x \in[0,1]}{\max} \left| \frac{2nx}{1+n^2 x^2} \right|\\
& = \underset{x \in[0,1]}{\max} \dfrac{2nx}{1+n^2 x^2}\\
& = \underset{x \in[0,1]}{\max} f_n(x).
\end{align*}
Es claro que para $x = 0$, la función $f_n$ alcanza su mínimo absoluto, por lo que consideremos a $x\in(0,1]$.
Procedemos a obtener el máximo absoluto de la función $f_n$. Derivando tenemos:
\begin{equation*}
f_n'(x) = \dfrac{2n(1-n^2 x^2)}{(1+n^2 x^2)^2}.
\end{equation*}Entonces, para $x\in(0, 1]$, tenemos que:
\begin{equation*}
f_n'(x) = 0 \quad \Longleftrightarrow \quad 1 – n^2 x^2 = 0 \quad \Longleftrightarrow \quad x = \frac{1}{n}.
\end{equation*}Notemos que:
\begin{equation*}
f_n\left(\frac{1}{n}\right) = \dfrac{2n\left(\frac{1}{n}\right)}{1+n^2\left(\frac{1}{n}\right)^2} = \frac{2}{2} = 1,
\end{equation*} \begin{equation*}
f_n\left(1\right) = \dfrac{2n\left(1\right)}{1+n^2\left(1\right)^2} = \frac{2n}{1+n^2} \leq 1,
\end{equation*} donde esta última desigualdad se sigue del hecho de que $(n-1)^2\geq 0$ para todo $n\in\mathbb{N}^+$, por lo que, en $x=\dfrac{1}{n}$ la función alcanza su máximo absoluto.
Entonces:
\begin{equation*}
M_n = \underset{x \in[0,1]}{\max} f_n(x) = 1,
\end{equation*}de donde:
\begin{equation*}
\lim_{n\to\infty} M_n = 1 \neq 0,
\end{equation*} por lo que, observación 28.4, $f_n \not \to f$ uniformemente en $[0,1]$.
Ahora procedemos a probar un resultado que nos permite garantizar la continuidad de la función límite de una sucesión convergente de funciones continuas, bajo la convergencia uniforme. Cabe mencionar que este resultado es válido en general para dos espacios métricos $(X, d_X)$ y $(Y, d_Y)$ que cumplan las condiciones dadas.
En este punto, es importante que enfaticemos en que dada una sucesión de funciones, podemos hablar de su convergencia puntual y/o uniforme, por lo que, antes de probar el resultado mencionado, consideremos el siguiente ejemplo, el cual nos deja ver una de las principales diferencias entre la convergencia puntual y la convergencia uniforme.
Ejemplo 28.4.
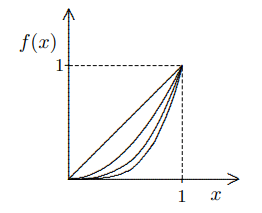
Consideremos a la sucesión de funciones reales $f_n:[0,1] \to \mathbb{R}$ dada por $f_n(x) = x^n$, con $n\in\mathbb{N}^+$. Claramente, para cada $n\in\mathbb{N}^+$ la función $f_n$ es continua en el intervalo $[0,1]$.
Sin embargo, el límite puntual de la sucesión $\left\{f_n\right\}_{n\geq 1}$, es decir, la función:
\begin{equation*}
f(x)= \lim_{n\to\infty} f_n(x) = \left\{ \begin{array}{lcc}
0 & \text{si} & 0 \leq x < 1, \\
\\ 1 & \text{si} & x=1, \end{array}
\right.
\end{equation*} no es continua en $[0,1]$, por lo que la convergencia puntual de la sucesión de funciones continuas $\left\{f_n\right\}_{n\geq 1}$ no garantiza la continuidad de la función $f$ en el intervalo real $[0,1]$.
El ejemplo anterior nos deja ver que, en general, la función límite de una sucesión de funciones continuas que converge puntualmente, puede no ser continua. Pero, ¿qué sucede si la convergencia de la sucesión de funciones continuas es uniforme?
Proposición 28.1.
Sean $S\subset \mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones continuas en $S$. Supongamos que la sucesión $\left\{f_n\right\}_{n\geq 0}$ converge uniformemente a una función $f:S\to\mathbb{C}$, entonces $f$ es continua.
Demostración. Dadas las hipótesis, tomemos al punto $a \in S$ fijo y sea $\varepsilon>0$.
Como la sucesión converge uniformemente a $f$, existe $N(\varepsilon)\in\mathbb{N}$ tal que si $n\geq N$, entonces:
\begin{equation*}
\left|f_n(z) – f(z) \right| < \frac{\varepsilon}{3}, \quad \forall z\in S.
\end{equation*}
Por otra parte, para cada $n\in\mathbb{N}$ tenemos que la función $f_n$ es continua en $S$, en particular es continua en $a$, por lo que para el $\varepsilon>0$ dado, existe $\delta>0$ tal que si $z\in S$ y $|z-a|<\delta$, entonces:
\begin{equation*}
\left|f_n(z) – f_n(a) \right| < \frac{\varepsilon}{3}.
\end{equation*}
Entonces, para todo $z\in S$ tal que $|z-a|<\delta$, se cumple que:
\begin{align*}
\left|f(z) – f(a) \right| & \leq \left|f_n(z) – f(z) \right| + \left|f_n(z) – f_n(a) \right| + \left|f_n(a) – f(a) \right|\\
& < \frac{\varepsilon}{3} + \frac{\varepsilon}{3} + \frac{\varepsilon}{3} = \varepsilon.
\end{align*}Por lo que, $f$ es continua en $a\in S$.
$\blacksquare$
Observación 28.5.
La proposición 28.1 suele utilizarse para determinar cuándo una sucesión de funciones no converge uniformemente, es decir, considerando la contrapuesta se deduce que si una sucesión de funciones continuas converge puntualmente a una función discontinua, entonces la convergencia no es uniforme. Sin embargo, no se cumple el recíproco, ya que puede suceder que el límite puntual de una sucesión de funciones sea una función continua y que dicha sucesión no converga uniformemente.
Ejemplo 28.5.
De acuerdo con el ejemplo 28.3, sabemos que la función límite puntual de la sucesión de funciones continuas $f_n(x) = \dfrac{2nx}{1+n^2 x^2}$, con $x\in[0, 1]$ y $n\in\mathbb{N}^+$, es la función continua $f(x) = 0$. Sin embargo, la sucesión $\left\{f_n\right\}_{n\geq 1}$ no converge uniformemente a $f$ en el intervalo real $[0, 1]$.
Ejemplo 28.6.
Por el ejemplo 28.4, tenemos que la función límite (puntual) de la sucesión de funciones continuas $\left\{f_n\right\}_{n\geq 1}$, dada por $f_n(x) = x^n$ con $x\in[0, 1]$, es una función discontinua, por lo que, la convergencia de la sucesión no puede ser uniforme.
Observación 28.6.
Recordemos que en Matemáticas muchos problemas difíciles se simplifican al saber bajo qué condiciones es posible el intercambio de límites, por lo que, la proposición 28.1 es de gran ayuda en este hecho.
Dada una sucesión de funciones $\left\{f_n\right\}_{n\geq 0}$ en $S\subset\mathbb{C}$ que converge uniformemente en $S$ se cumple que:
\begin{equation*}
\lim_{z\to z_0} \lim_{n\to\infty} f_n(z) = \lim_{n\to\infty} \lim_{z\to z_0} f_n(z) = \lim_{n\to\infty} f_n(z_0),
\end{equation*} para todo $z_0\in S$ que es un punto de acumulación de $S$.
Definición 28.4. (Sucesión de funciones uniformemente de Cauchy.)
Sea $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S\subset\mathbb{C}$. Diremos que $\left\{f_n\right\}_{n\geq 0}$ es uniformemente de Cauchy en $S$ si para todo $\varepsilon>0$ existe $N(\varepsilon)\in\mathbb{N}$ tal que si $m, n\geq N$, con $n>m$, entonces:
\begin{equation*}
|f_n(z) – f_m(z)| < \varepsilon, \quad \forall z\in S.
\end{equation*}
Proposición 28.2. (Criterio de Cauchy para convergencia uniforme.)
Sea $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S\subset\mathbb{C}$. Entonces, $\left\{f_n\right\}_{n\geq 0}$ converge uniformemente en $S$ si y solo si es una sucesión uniformemente de Cauchy en $S$.
Demostración. Dadas las hipótesis.
$\Longrightarrow)$
Sea $\varepsilon>0$. Supongamos que $\left\{f_n\right\}_{n\geq 0}$ converge uniformemente en $S$ a una función $f:S\to\mathbb{C}$, por lo que existe $N(\varepsilon)\in\mathbb{N}$ tal que si $n\geq N$ entonces:
\begin{equation*}
|f_n(z) – f(z)| < \frac{\varepsilon}{2}, \quad \forall z\in S.
\end{equation*}
De la desigualdad del triángulo, para $z\in S$ y $n>m \geq N$, se sigue que:
\begin{equation*}
|f_n(z) – f_m(z)| \leq |f_n(z) – f(z)| + |f(z) – f_m(z)| < \frac{\varepsilon}{2} + \frac{\varepsilon}{2} = \varepsilon.
\end{equation*}
Por lo que $\left\{f_n\right\}_{n\geq 0}$ es uniformemente de Cauchy en $S$.
$(\Longleftarrow$
Supongamos que $\left\{f_n\right\}_{n\geq 0}$ es uniformemente de Cauchy en $S$.
Notemos que para cada $z\in S$, tenemos que la sucesión de números complejos $\left\{f_n(z)\right\}_{n\geq 0}$ es de Cauchy, por lo que es una sucesión convergente, entonces existe $f: S\to \mathbb{C}$ dada por:
\begin{equation*}
f(z) = \lim_{n\to\infty} f_n(z), \quad \forall z\in S,
\end{equation*} es decir, $f_n \to f$ puntualmente en $S$.
Sea $\varepsilon>0$. Por hipótesis sabemos que existe $N\in\mathbb{N}$ tal que si $m,n \geq N$, con $n>m$, entonces:
\begin{equation*}
|f_n(z) – f_m(z)| < \frac{\varepsilon}{2}, \quad \forall z\in S.
\end{equation*}
Si fijamos $m\in\mathbb{N}$, con $m\geq N$, y $z\in S$, entonces:
\begin{equation*}
|f(z) – f_m(z)| = \lim_{n\to \infty} |f_n(z) – f_m(z)| \leq \frac{\varepsilon}{2} <\varepsilon.
\end{equation*}
Como $m\geq N$ era arbitrario, entonces:
\begin{equation*}
|f(z) – f_m(z)| < \varepsilon.
\end{equation*}
Por lo que $f_n \to f$ uniformemente en $S$.
$\blacksquare$
Definición 28.5. (Sucesión de sumas parciales de una sucesión de funciones.)
Sean $S\subset\mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$. Para cada $k\in\mathbb{N}$ definimos a la función $s_k : S \to \mathbb{C}$ como:
\begin{equation*}
s_n(z) = \sum_{k=0}^n f_k(z).
\end{equation*}
A las funciones $s_n$ las llamaremos las sumas parciales de la sucesión de funciones $\left\{f_n\right\}_{n\geq 0}$ y a la sucesión de sumas parciales la denotamos como $\left\{s_n\right\}_{n\geq 0}$.
Definición 28.6. (Convergencia puntual y convergencia uniforme de una serie de funciones.)
Sean $S\subset\mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$. Diremos que la serie de funciones $\displaystyle \sum_{n=0}^\infty f_n$ converge puntualmente en $S$ si la sucesión de sumas parciales $\left\{s_n\right\}_{n\geq 0}$ converge puntualmente en $S$ a una función $s: S\to \mathbb{C}$.
Por otra parte, si la sucesión de sumas parciales $\left\{s_n\right\}_{n\geq 0}$ converge uniformemente en $S$ a una función $s: S\to \mathbb{C}$, diremos que la serie de funciones $\displaystyle\sum_{n=0}^\infty f_n$ converge uniformemente en $S$.
En cualquiera de ambos casos, una vez especificado el tipo de convergencia, denotaremos la convergencia de la serie de funciones a la función $s$ como:
\begin{equation*}
s(z) = \sum_{n=0}^\infty f_n(z),
\end{equation*}
y a la función $s$ la llamaremos la función suma de la serie.
De acuerdo con la definición anterior y considerando el corolario 27.1, no es difícil probar el siguiente:
Corolario 28.1.
Sea $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S\subset \mathbb{C}$. Si la serie $\displaystyle\sum_{n=0}^\infty f_n$ converge puntualmente en $S$, entonces la sucesión $\left\{f_n\right\}_{n\geq 0}$ converge puntualmente a $0$ en $S$.
Demostración. Se deja como ejercicio al lector.
$\blacksquare$
Observación 28.7.
Considerando la observación 28.3 y la definición 28.6, debe ser claro que la convergencia uniforme de una serie de funciones implica la convergencia puntual de la misma.
Definición 28.7. (Serie de funciones absolutamente convergente.)
Sea $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S\subset\mathbb{C}$. Diremos que la serie de funciones $\displaystyle \sum_{n=0}^\infty f_n$ es absolutamente convergente en $S$ si la serie $\displaystyle \sum_{n=0}^\infty |f_n|$ es puntualmente convergente en $S$.
Observación 28.8.
Al igual que con las series de números complejos, una serie de funciones absolutamente convergente es puntualmente convergente.
Como lo hicimos con las sucesiones de funciones, podemos preguntarnos qué pasa en el caso de tener una serie infinita de funciones continuas que es convergente, ¿su función límite será continua? Para responder esta pregunta debemos recordar que al hablar de una serie de funciones convergente podemos tener la convergencia puntual y/o la convergencia uniforme de la sucesión de sumas parciales. Es claro que en el caso de una suma finita de funciones continuas, la función suma también será continua. Sin embargo, de acuerdo con la proposición 28.1, inferimos que la continuidad de la función límite de una serie convergente de funciones continuas se dará siempre que la convergencia sea uniforme.
Corolario 28.2.
Sean $S\subset \mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones continuas en $S$. Si la serie $\displaystyle\sum_{n=0}^\infty f_n$ converge uniformemente en $S$ a la función $s:S\to\mathbb{C}$, entonces $s$ es continua.
Demostración. Se sigue de la proposición 28.1, por lo que los detalles de la prueba se dejan como ejercicio al lector.
$\blacksquare$
Ejemplo 28.7.
Veamos que la serie:
\begin{equation*}
\displaystyle \sum_{n=1}^{\infty} 2^n \operatorname{sen}\left(\frac{1}{3^n z}\right),
\end{equation*} es absolutamente convergente en $\mathbb{C}\setminus\{0\}$, pero que la serie no converge uniformemente en $\mathbb{C}$.
Solución. Primeramente, notemos que para cada $z\neq 0$ la sucesión de funciones $\left\{f_n\right\}_{n\geq 1}$, dada por:
\begin{equation*}
f_n(z) = 2^n \operatorname{sen}\left(\frac{1}{3^n z}\right),
\end{equation*} define una sucesión de números complejos, es decir, $\left\{f_n(z)\right\}_{n\geq 1}$. Por lo que, para $z\neq 0$ podemos verificar que la serie es absolutamente convergente utilizando el criterio del cociente de D’Alembert.
De acuerdo con el ejemplo 22.5 sabemos que:
\begin{equation*}
\lim_{w\to 0} \frac{\operatorname{sen}(w)}{w} = 1,
\end{equation*}
y del ejercicio 3 de la entrada 14 se sigue que:
\begin{equation*}
\lim_{w\to 0} \left|\frac{\operatorname{sen}(w)}{w}\right| = \lim_{n\to\infty} \left|\dfrac{\operatorname{sen}\left(\dfrac{1}{3^{n+1} z}\right)}{\dfrac{1}{3^{n+1} z}}\right| = 1, \quad z\neq 0.
\end{equation*}
Sea $z\neq 0$, entonces:
\begin{align*}
\lim_{n\to\infty} \frac{\left|f_{n+1}(z)\right|}{\left|f_{n}(z)\right|} & = \lim_{n\to\infty} \left|\dfrac{2^{n+1} \operatorname{sen}\left(\dfrac{1}{3^{n+1} z}\right)}{2^n \operatorname{sen}\left(\dfrac{1}{3^n z}\right)}\right|\\
& = \lim_{n\to\infty} 2 \left|\dfrac{\dfrac{\operatorname{sen}\left(\dfrac{1}{3^{n+1} z}\right)}{\dfrac{1}{3^{n+1} z}}}{\dfrac{\operatorname{sen}\left(\dfrac{1}{3^{n} z}\right)}{\dfrac{1}{3^{n} z}}}\right| \left|\dfrac{\dfrac{1}{3^{n+1} z}}{\dfrac{1}{3^n z}}\right|\\
& = \lim_{w\to 0 } \frac{2}{3} \left| \dfrac{\dfrac{\operatorname{sen}(w)}{w}}{\dfrac{\operatorname{sen}(3w)}{3w}} \right|\\
&= \frac{2}{3} < 1.
\end{align*}
Entonces, para todo $z\neq 0$ la serie $ \displaystyle \sum_{n=1}^{\infty} 2^n \operatorname{sen}\left(\frac{1}{3^n z}\right)$ es absolutamente convergente y por tanto la serie converge puntualmente en $\mathbb{C}\setminus\{0\}$.
Por otra parte, es claro que las funciones de la sucesión $\left\{f_n\right\}_{n\geq 1}$ son continuas para todo $z\neq 0$. Sin embargo, para $z = 0$ dichas funciones no están definidas y como $\lim\limits_{z \to 0} f_n(z)$ no existe, entonces la función límite puntual $s(z) = \displaystyle \sum_{n=1}^{\infty} 2^n \operatorname{sen}\left(\frac{1}{3^n z}\right)$ no es continua en $z=0$, por lo que, corolario 28.2, la serie no converge uniformemente en $\mathbb{C}$.
Proposición 28.3. (Criterio $M$ de Weierstrass.)
Sean $S\subset \mathbb{C}$ y $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$. Si para cada $n\in\mathbb{N}$ existe $M_n\geq 0$ tal que $\left|f_n(z)\right| \leq M_n$ para todo $z\in S$ y la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge, entonces la serie de funciones $\displaystyle\sum_{n=0}^\infty f_n$ converge absolutamente y uniformemente en $S$.
Demostración. Dadas las hipótesis, tenemos que para todo $z\in S$ se cumple que:
\begin{equation*}
|f_n(z)| \leq M_n, \quad \forall n\in\mathbb{N}.
\end{equation*}
Dado que la serie $\displaystyle\sum_{n=0}^\infty M_n$ es convergente, se sigue del criterio de comparación, proposición 27.4, que la serie $\displaystyle\sum_{n=0}^\infty f_n$ es absolutamente convergente. Más aún, de la convergencia absoluta de la serie se sigue que la serie $\displaystyle\sum_{n=0}^\infty f_n$ converge, proposición 27.3, para todo $z\in S$.
Definimos a la función $f:S\to\mathbb{C}$ como:
\begin{equation*}
f(z) = \lim_{n\to\infty} \sum_{k=0}^n f_k(z) = \sum_{n=0}^\infty f_n(z), \quad \forall z\in S.
\end{equation*}
Sea $\left\{s_n\right\}_{n\geq 0}$ la sucesión de sumas parciales de la serie. Veamos que dicha sucesión de funciones converge uniformemente a $f$ en $S$.
Sea $\varepsilon>0$. Por el criterio de Cauchy, proposición 27.1, tenemos que existe $N(\varepsilon)\in\mathbb{N}$ tal que si $n, m\geq N$, con $n>m$, entonces:
\begin{equation*}
\sum_{k=m+1}^n M_k = \left|\sum_{k=m+1}^n M_k\right| < \varepsilon.
\end{equation*}
Por la desigualdad del triángulo, para todo $n,m\geq N$, con $n>m$ y todo $z\in S$, se tiene que:
\begin{align*}
|s_n(z) – s_m(z)| = \left|\sum_{k=0}^n f_k(z) – \sum_{k=0}^m f_k(z) \right|
& = \left|\sum_{k=m+1}^n f_k(z) \right|\\
& \leq \sum_{k=m+1}^n \left| f_k(z) \right|\\
& \leq \sum_{k=m+1}^n M_k < \varepsilon.
\end{align*}
Entonces, la sucesión de funciones $\left\{s_n\right\}_{n\geq 0}$ es uniformemente de Cauchy en $S$, por lo que, proposición 28.2, converge uniformemente a $f$ en $S$.
$\blacksquare$
Ejemplo 28.8.
Veamos que la serie geométrica $\displaystyle\sum_{n=0}^\infty z^n$ converge uniformemente a la función $s(z) =\dfrac{1}{1-z}$ en todo subdisco cerrado $\overline{B}(0,r)$, con $0<r<1$, del disco abierto $B(0,1)$, pero que la convergencia en $B(0,1)$ es solo puntual y no uniforme.
Solución. De acuerdo con el ejemplo 27.3, sabemos que la serie geométrica $\displaystyle\sum\displaystyle_{n=0}^\infty z^n$ converge a $\dfrac{1}{1-z}$ si $|z|<1$.
Sean $z \in \overline{B}(0,r)$, con $0< r < 1$, y $f_n(z) = z^n$ para todo $n\in\mathbb{N}$.
Notemos que:
\begin{equation*}
|f_n(z)| = |z^n| = |z|^n \leq r^n = M_n, \quad z \in \overline{B}(0,r).
\end{equation*}
Es claro que la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge para $0 < r < 1$. Por lo que, de acuerdo con el criterio $M$ de Weierstrass, la serie $\displaystyle\sum_{n=0}^\infty z^n$ converge uniformemente a la función $f(z) =\dfrac{1}{1-z}$ en todo disco cerrado $\overline{B}(0,r) \subset B(0,1)$ si $|z| \leq r < 1$.
Por otra parte, sabemos que la $n$-ésima suma parcial de la serie geométrica es:
\begin{equation*}
s_n(z) = \frac{1 – z^{n+1}}{1-z},
\end{equation*}
de donde:
\begin{equation*}
f(z) = \lim_{n \to \infty} s_n(z) = \frac{1}{1-z}, \quad \forall z \in B(0,1),
\end{equation*}
es decir que la convergencia es puntual en el disco abierto $B(0,1)$.
Por último, notemos que si $z=x\in\mathbb{R}$, con $0<x<1$, entonces:
\begin{equation*}
|f(z) – s_n(z)| = \left|\frac{1}{1-x} – \frac{1 – x^{n+1}}{1-x}\right| = \frac{\left|x^{n+1}\right|}{\left|1-x\right|} = \frac{x^{n+1}}{1-x}.
\end{equation*}
Claramente $|f(z) – s_n(z)| \to \infty$ si $x\to 1^{-}$. Entonces, no existe $n\in\mathbb{N}$ tal que:
\begin{equation*}
|f(z) – s_n(z)| = \frac{x^{n+1}}{1-x} <\varepsilon, \quad \forall x\in (0,1).
\end{equation*}
Por lo que la convergencia no es uniforme en $B(0,1)$.
Ejemplo 28.9.
Consideremos las siguientes series de funciones:
a) $\displaystyle\sum_{n=0}^\infty \dfrac{z^n+6i}{2^n +1}$, para $z\in B(0,1)$.
b) Función zeta de Riemann: \begin{equation*} \zeta(z) = \displaystyle \sum_{n=1}^\infty n^{-z}, \end{equation*} donde consideramos la rama principal de $n^{-z}$, para $z \in S_\sigma = \left\{z\in\mathbb{C} : \operatorname{Re}(z) \geq \sigma\right\}$, con $\sigma>1$.
Veamos que ambas series son uniformemente y absolutamente convergentes en el dominio dado.
Solución.
a) Primeramente recordemos que si $z\in B(0,1)$, entonces $|z|<1$.
Por la desigualdad del triángulo, para todo $n\in\mathbb{N}$ tenemos que:
\begin{equation*}
\left| \frac{z^n+6i}{2^n +1} \right| = \frac{\left|z^n+6i\right|}{2^n +1} \leq \frac{|z|^n + 6}{2^n + 1} \leq \frac{7}{2^n}.
\end{equation*}
Sea $M_n = 7/2^n$, entonces $M_n>0$ para todo $n\in\mathbb{N}$. Más aún, dado que $\left|1/2\right| < 1$, entonces la serie geométrica $\displaystyle\sum_{n=0}^\infty \, \dfrac{1}{2^n}$ es convergente y por la proposición 27.2 tenemos que:
\begin{equation*}
\displaystyle\sum_{n=0}^\infty \dfrac{7}{2^n} = 7 \, \, \displaystyle\sum_{n=0}^\infty \dfrac{1}{2^n}= 7 \left(\frac{1}{1-\dfrac{1}{2}}\right) = 14,
\end{equation*} entonces la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge, por lo que, de acuerdo con el criterio $M$ de Weierstrass, la serie $\displaystyle\sum_{n=0}^\infty \dfrac{z^n+6i}{2^n +1}$ es absoluta y uniformemente convergente en $B(0,1)$.
Por último, notemos que para cada $n\in\mathbb{N}$, la función $f_n(z) = \dfrac{z^n+6i}{2^n +1}$ es una función polinomial, por lo que es continua en todo $\mathbb{C}$, en particular en el disco $B(0,1)$. Entonces, por el corolario 28.2, concluimos que la función $s: B(0,1) \to \mathbb{C}$ a la que converge la serie, es una función continua.
b) Considerando la rama principal de la función multivaluada $n^{-z}$, definición 21.6, para cada $n\in\mathbb{N}^+$ tenemos la función:
\begin{equation*}
f_n(z) = n^{-z} = e^{-z \operatorname{Log}(n)}.
\end{equation*}
Si $z = x+iy \in S_\sigma$, entonces $x\geq \sigma > 1$ y por la proposición 20.2 tenemos que:
\begin{align*}
\left|f_n(z)\right| = \left|n^{-z}\right| & = \left| e^{-(x+iy) \operatorname{Log}(n)}\right|\\
& = \left| e^{-x\operatorname{Log}(n)} e^{-iy\operatorname{Log}(n)}\right|\\
& = \left| e^{-x\operatorname{Log}(n)} \right| \left|e^{-iy\operatorname{Log}(n)}\right|\\
& = e^{-x \operatorname{Log}(n)}\\
& \leq e^{-\sigma \operatorname{Log}(n)}\\
& = n^{-\sigma}.
\end{align*}
Para cada $n\geq 1$ sea $M_n = n^{-\sigma}$, con $\sigma >1$.
Considerando el criterio de convergencia de las series reales $p$, es decir, las series de la forma:
\begin{equation*}
\sum_{n=1}^{\infty} n^{-p}
\end{equation*}
visto en nuestros cursos de Cálculo, sabemos que estas series son convergentes si y solo si $p>1$. Entonces, dado que $\sigma>1$, es claro que la serie:
\begin{equation*}
\sum_{n=1}^{\infty} M_n = \sum_{n=1}^{\infty} n^{-\sigma},
\end{equation*}
es convergente, por lo que, de acuerdo con el cirterio $M$ de Weierstrass, la función zeta de Riemann, $\zeta(z) = \displaystyle \sum_{n=1}^\infty n^{-z}$, es absoluta y uniformemente convergente en $S_\sigma$, con $\sigma>1$.
Ejemplo 28.10.
Veamos que las siguientes series de funciones son uniformemente y absolutamente convergentes en todo disco cerrado $\overline{B}(0, R)$, con $R>0$.
a)$\displaystyle\sum_{n=0}^\infty \dfrac{z^n}{n!}$.
b) $\displaystyle\sum_{n=0}^\infty \frac{(-1)^n z^{2n+1}}{(2n+1)!}$.
c) $\displaystyle \sum_{n=0}^\infty \frac{(-1)^n z^{2n}}{(2n)!}$.
Solución. Sea $z\in \overline{B}(0, R)$, con $R>0$, entonces $|z|\leq R$. El procedimiento es completamente análogo en los tres casos, por lo que los detalles de los últimos dos incisos se dejan como ejercicio al lector.
a) Para cada $n\in\mathbb{N}$ definimos:
\begin{equation*}
f_n(z) = \frac{z^n}{n!}.
\end{equation*}
Notemos que:
\begin{equation*}
\left|f_n(z)\right| = \left|\frac{z^n}{n!}\right| = \frac{\left|z\right|^n}{n!} \leq \frac{R^n}{n!}.
\end{equation*}
Para cada $n\in\mathbb{N}$ sea $M_n = \dfrac{R^n}{n!}$. Dado que $R>0$, es claro que $M_n > 0$ para todo $n\geq 0$.
Tenemos que:
\begin{equation*}
\lim_{n\to\infty} \frac{M_{n+1}}{M_n} = \lim_{n\to\infty} \dfrac{\dfrac{R^{n+1}}{(n+1)!}}{\dfrac{R^n}{n!}} = \lim_{n\to\infty} \frac{R}{n+1} = 0 < 1,
\end{equation*} entonces, por el criterio del cociente de D’Alembert, proposición 27.5, la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge.
Por lo tanto, de acuerdo con el criterio $M$ de Weierstrass, concluimos que la serie:
\begin{equation*}
\displaystyle\sum_{n=0}^\infty f_n(z) = \displaystyle\sum_{n=0}^\infty \dfrac{z^n}{n!},
\end{equation*} es absoluta y uniformemente convergente en todo disco cerrado $\overline{B}(0,R)$, con $R>0$.
b) Para cada $n\in\mathbb{N}$ definimos:
\begin{equation*}
f_n(z) = \frac{(-1)^n z^{2n+1}}{(2n+1)!} \quad \text{y} \quad M_n(z) = \frac{R^{2n+1}}{(2n+1)!}.
\end{equation*}
Por el criterio del cociente de D’Alembert, proposición 27.5, la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge.
Notemos que para todo $n\in \mathbb{N}$ y todo $z\in \overline{B}(0,R)$, con $R>0$, se cumple que $|f_n(z)| \leq M_n$, entonces por el criterio $M$ de Weierstrass se tiene que la serie $\displaystyle\sum_{n=0}^\infty \frac{(-1)^n z^{2n+1}}{(2n+1)!}$ es absoluta y uniformemente convergente en todo disco cerrado $\overline{B}(0,R)$.
c) Para cada $n\in\mathbb{N}$ sea:
\begin{equation*}
f_n(z) = \frac{(-1)^n z^{2n}}{(2n)!} \quad \text{y} \quad M_n(z) = \frac{R^{2n}}{(2n)!}.
\end{equation*}
Del criterio de D’Alembert, proposición 27.5, se sigue que la serie $\displaystyle\sum_{n=0}^\infty M_n$ converge.
Como para todo $n\in \mathbb{N}$ y todo $z\in \overline{B}(0,R)$, con $R>0$, se cumple que $|f_n(z)| \leq M_n$, entonces por el criterio $M$ de Weierstrass se tiene que la serie $\displaystyle \sum_{n=0}^\infty \frac{(-1)^n z^{2n}}{(2n)!}$ es absoluta y uniformemente convergente en todo disco cerrado $\overline{B}(0,R)$.
Ejemplo 28.11.
Determinemos el conjunto $S \subset \mathbb{C}$ dónde la serie $\displaystyle \sum_{n=1}^\infty \dfrac{\operatorname{cos(nz)}}{n^3}$ es absoluta y uniformemente convergente.
Solución. Para cada $n\in\mathbb{N}^+$ definimos:
\begin{equation*}
f_n(z) = \frac{\operatorname{cos}(nz)}{n^3} = \frac{e^{i(nz)} + e^{-i(nz)}}{2n^3}.
\end{equation*}
Sea $z=x+iy\in\mathbb{C}$. De acuerdo con la proposición 20.2 tenemos que:
\begin{align*}
\left|f_n(z)\right| & = \left|\frac{e^{i(nz)} + e^{-i(nz)}}{2n^3}\right|\\
& \leq \frac{1}{2n^3}\left(\left|e^{in(x+iy)}\right| + \left|e^{-in(x+iy)}\right|\right)\\
& = \frac{1}{2n^3}\left(\left|e^{inx}\right| \left|e^{-ny}\right| + \left|e^{-inx}\right| \left|e^{ny}\right|\right)\\
& = \frac{1}{2n^3}\left(e^{-ny} + e^{ny}\right)\\
& =: M_n.
\end{align*}
De acuerdo con la proposición 27.2, sabemos que:
\begin{align*}
\sum_{n=1}^\infty M_n & = \sum_{n=1}^\infty \frac{e^{-ny} + e^{ny}}{2n^3}\\
& = \sum_{n=1}^\infty \frac{e^{-ny}}{2n^3} + \sum_{n=1}^\infty \frac{e^{ny}}{2n^3},
\end{align*} si y solo si las series del lado derecho de la igualdad son convergentes.
Analicemos a las series:
\begin{equation*}
\sum_{n=1}^\infty \frac{e^{-ny}}{2n^3} \quad \text{y} \quad \sum_{n=1}^\infty \frac{e^{ny}}{2n^3}.
\end{equation*}
Para $z=x+iy \in\mathbb{C}$ tenemos que $y>0$, $y<0$ ó $y=0$.
Si $y>0$, entonces $\lim\limits_{n\to\infty} \dfrac{e^{ny}}{2n^3} \neq 0$. Por lo que, la serie $\displaystyle \sum_{n=1}^\infty \frac{e^{ny}}{2n^3}$ diverge para $y>0$.
Análogamente, si $y<0$, entonces $\lim\limits_{n\to\infty} \dfrac{e^{-ny}}{2n^3} \neq 0$. Por lo que, la serie $\displaystyle \sum_{n=1}^\infty \frac{e^{-ny}}{2n^3}$ diverge para $y<0$.
Por último, si $y=0$, entonces ambas series convergen por el criterio de convergencia de las series $p$, con $p=3>1$. En tal caso:
\begin{equation*}
\sum_{n=1}^\infty M_n = \sum_{n=1}^\infty \frac{e^{-ny} + e^{ny}}{2n^3} = \sum_{n=1}^\infty \frac{2}{2n^3} = \sum_{n=1}^\infty \frac{1}{n^3},
\end{equation*} la cual es una serie convergente.
Es claro que para $y=0$ tenemos que $z=x\in\mathbb{C}$, entonces el conjunto $S\subset\mathbb{C}$ de convergencia de la serie es $S =\mathbb{R}$, es decir, la recta real.
Para $z = x \in \mathbb{R}$, tenemos que:
\begin{equation*}
\left|f_n(z)\right| = \left|\frac{\operatorname{cos}(nx)}{n^3}\right| \leq M_n, \quad \forall n\in\mathbb{N}^+.
\end{equation*}
Entonces, por el criterio $M$ de Weierstrass, concluimos que la serie $\displaystyle \sum_{n=1}^\infty \dfrac{\operatorname{cos(nz)}}{n^3}$ es absolutamente y uniformemente convergente en $\mathbb{R}$.
Tarea moral
- Prueba la observación 28.4. Sean $S\subset \mathbb{C}$, $\left\{f_n\right\}_{n\geq 0}$ una sucesión de funciones en $S$ y $f: S\to\mathbb{C}$ una función. Supón que para todo $n\in\mathbb{N}$ existe: \begin{equation*} M_n = \operatorname{sup}\left\{\left|f_n(z) – f(z)\right| : z \in S\right\}. \end{equation*} Prueba que $f_n \to f$ uniformemente si y solo si $\lim\limits_{n\to\infty} M_n = 0$.
- Considera las siguientes sucesiones de funciones. Para cada una (i) determina si la sucesión converge puntualmente, en caso afirmativo obtén su función límite, (ii) analiza si la función converge uniformemente en el dominio $S \subset \mathbb{C}$ dado y (iii) si la convergencia uniforme no se da en $S$ determina algún subconjunto cerrado y acotado de $S$ donde se de la convergencia uniforme.
a) $f_n(z) = \dfrac{\operatorname{sen}(nz)}{n^2}$, para $S = \left\{z\in\mathbb{C} : |z| \leq 1\right\}$.
b) $f_n(z) = \dfrac{z^2+nz+1}{n^2 z + 1}$, para $S = \left\{z\in\mathbb{C} : 2 < |z|\right\}$.
c) $f_n(z) = \dfrac{1}{(z+n+1)^2}$, para $S = \left\{z\in\mathbb{C} : \operatorname{Re}(z) > 0\right\}$.
d) $f_n(z) = \dfrac{z^n+z}{n+1}$, para $S = \left\{z\in\mathbb{C} : |z| \leq 1\right\}$.
- Utiliza el criterio $M$ de Weierstrass para mostrar que las siguientes series convergen uniformemente en la región dada.
a) $\displaystyle\sum_{n=1}^\infty \operatorname{Re}\left(\dfrac{(z + i)^n}{3^n}\right)$ en $B(0,1)$.
b) $\displaystyle\sum_{n=1}^\infty \dfrac{1+z^n}{2^n – z}$ en $B(0,1)$.
c) $\displaystyle\sum_{n=0}^\infty \dfrac{1}{(5-z)^n}$ para $|z|\leq \dfrac{7}{2}$.
d) $\displaystyle\sum_{n=0}^\infty \dfrac{(z+1-3i)^n}{4^n}$ para $|z-3i|\leq \dfrac{1}{2}$.
- Considera la sucesión de funciones dada por: \begin{equation*} f_n(z)= \left\{ \begin{array}{lcc} n|z| & \text{si} & |z| \leq \dfrac{1}{n}, \\ \\ 1 & \text{si} & \dfrac{1}{n} \leq |z| \leq 1. \end{array} \right. \end{equation*} ¿La sucesión de funciones $\left\{f_n\right\}_{n\geq 1}$ converge puntualmente en el disco cerrado $\overline{B}(0,1)$?
Hint: Analiza la continuidad de la función límite puntual en $\overline{B}(0,1)$ y considera la proposición 28.1.
- La $n$-ésima suma parcial de una serie de funciones está dada por la función $s_n(z) = \dfrac{z^n}{n}$ para $|z|\leq 1$. Considerando la $n$-ésima suma parcial construye la serie. ¿Dicha serie converge uniformemente en el disco cerrado $\overline{B}(0,1)$?
- Muestra que las siguientes series son absolutamente y uniformemente convergentes en el dominio dado.
a) $\displaystyle\sum_{n=1}^\infty \dfrac{z^{2n}}{1- z^{2n}}$ en todo disco cerrado $\overline{B}(0,r)$, con $0<r<1$.
b) $\displaystyle\sum_{n=1}^\infty \dfrac{z^n}{n\sqrt{n+1}}$ en $\overline{B}(0,1)$.
c) $\displaystyle\sum_{n=1}^\infty \dfrac{1}{n^2+z^2}$ para $1<|z|<2$.
d) $\displaystyle\sum_{n=1}^\infty \dfrac{e^{inz}}{n^2}$ en $S = \{z\in\mathbb{C} : \operatorname{Im}(z) > 0\}$.
- Demuestra los corolarios 28.1 y 28.2.
- Muestra que la serie:\begin{equation*} \sum_{n=1}^\infty \frac{z^{n-1}}{(1-z^n)(1-z^{n+1})},\end{equation*} converge a $\dfrac{1}{(1-z)^2}$ si $|z|<1$ y a $\dfrac{1}{z(1-z)^2}$ si $|z|>1$. Prueba que la convergencia es uniforme para $|z|\leq r<1$ en el primer caso y para $|z|\geq \rho>1$ en el segundo caso.
Hint: Multiplica y divide cada término de la serie por $1-z$ y utiliza una descomposición por fracciones parciales para obtener una suma telescópica.
Más adelante…
En esta entrada hemos abordado las definiciones de sucesión y serie de funciones complejas, que como vimos resultaron idénticas a las que teníamos para el caso real. Además, probamos una serie de resultados, con los que ya estábamos familiarizados para la versión real, que extienden las propiedades de convergencia uniforme y puntual para el caso complejo, a través de los cuales podemos estudiar la convergencia de las sucesiones y series de funciones complejas.
En particular, vimos que al igual que en el caso real, el criterio $M$ de Weierstrass resulta de gran utilidad para el estudio de la convergencia uniforme de una serie.
Por otra parte, vimos que podemos garantizar la continuidad del límite uniforme de una sucesión de funciones continuas, así como la continuidad de la función suma de una serie de funciones continuas que converge uniformemente, lo cual resulta de gran interés pues nos permite el intercambio formal de los límites que definen la continuidad y la convergencia, observación 28.6.
En la siguiente entrada veremos el concepto de series de potencias para el caso complejo y probaremos una serie de resultados importantes que nos permitirán caracterizar propiedades de estas series como la continuidad y analicidad. Aunque podemos pensar a una serie de potencias como una serie de funciones complejas o como una serie de números complejos con una forma muy particular, veremos que el estudio de este tipo de series es de gran interés y utilidad pues nos permitirán escribir a las funciones complejas, en particular a las funciones elementales, como una serie de números complejos y así aprovechar las propiedades de convergencia de la serie.
Entradas relacionadas