En esta unidad daremos un par de definiciones que formalizarán la idea de que un conjunto sea más grande que otro, es decir, vamos a definir y formalizar la noción de que un conjunto tenga más elementos o la misma cantidad que otro, aún cuando no definamos formalmente qué es lo que entenderemos por cantidad de elementos de un conjunto.
Equipotencia
Definición. Sean $A$ y $B$ conjuntos. Decimos que $A$ es equipotente a $B$ si existe una función biyectiva $f:A\to B$. Denotaremos $A$ es equipotente a $B$ como $A\sim B$ o bien como $|A|=|B|$.
Si podemos establecer una función biyectiva entre $A$ y $B$, diremos que tienen la misma cantidad de elementos.
Ejemplo.
Sea $A=\mathbb{N}$ y $B=\set{2k:\ k\in\mathbb{N}}$.
Afirmación. $A$ y $B$ son equipotentes.
Demostración de la afirmación.
Sea $f:\mathbb{N}\to B$ la función dada por $f(n)=2n$. Veamos que $f$ es biyectiva.
Inyectividad. Sean $x,y\in \mathbb{N}$ tales que $f(x)= f(y)$, esto es $2x=2y$. Luego, por ley de la cancelación para el producto tenemos que $x=y$ y, por lo tanto, $f$ es inyectiva.
Suprayectividad. Si $y\in B$, entonces $y=2k$ para algún $k\in \mathbb{N}$. Así, existe $k\in \mathbb{N}$ tal que $f(k)=2k=y$ y, por consiguiente, $f$ es suprayectiva.
Por lo tanto, $f$ es biyectiva, de modo que $A\sim B$.
$\square$
El siguiente teorema seguro te recordará algunas cosas que discutimos cuando hablamos acerca de relaciones de equivalencia.
Teorema. Sean $A$, $B$ y $C$ conjuntos. Entonces se satisfacen los siguientes enunciados:
$A$ es equipotente a $A$.
Si $A$ es equipotente a $B$, entonces $B$ es equipotente a $A$.
Si $A$ es equipotente a $B$ y $B$ es equipotente a $C$, entonces $A$ es equipotente a $C$.
Demostración.
La función $Id_A$ es una función biyectiva, por lo que podemos concluir que $A\sim A$.
Supongamos que $A\sim B$, entonces existe $f:A\to B$ biyectiva. Luego, $f^{-1}:B\to A$ es una función biyectiva y por lo tanto, $B\sim A$.
Supongamos que $A\sim B$ y $B\sim C$, esto es, existe $f:A\to B$ biyectiva y $g:B\to C$ biyectiva. Luego, consideremos $g\circ f: A\to C$, como $f$ y $g$ son biyectivas, entonces $g\circ f$ es biyectiva. Así, $A\sim C$.
$\square$
De esta manera, la equipotencia se comporta «como una relación de equivalencia». Pero, estrictamente hablando, no es una relación de equivalencia, pues dicha relación tendría que darse en la colección de todos los conjuntos, pero ya sabemos que esta colección no es un conjunto.
Por la simetría, en vez de decir «$A$ es equipontente a $B$» podemos simplemente decir que $A$ y $B$ son equipotentes.
Dominancia
Hemos visto que para que un conjunto sea equipotente a otro se requiere que exista una función biyectiva. Esto «se comporta» como una relación de equivalencia. ¿Hay una noción que se comporte como un orden parcial o un orden estricto? Sí. La siguiente definición establece esta idea.
Definición. Sean $A$ y $B$ conjuntos. Decimos que $B$ domina a $A$ si existe $f: A\to B$ tal que $f$ es inyectiva, pero no existe una función biyectiva de $A$ en $B$. Lo denotaremos como $|A|\preceq|B|$.
Ejemplo.
Sean $A=\set{1,2,3}$ y $B=\mathbb{N}$. Tenemos que $|A|\preceq|B|$ pues $f=\set{(1,1), (2,2), (3,3)}$ es iuna función inyectiva. Sin embargo, no existe $h:A\to B$ tal que $h$ sea suprayectiva.
$\square$
El siguiente teorema formaliza la idea de que $\preceq$ «se comporta» como un orden parcial.
Teorema. Sean $A$, $B$ y $C$ conjuntos. Entonces, se satisfacen los siguientes enunciados:
$A\preceq A$.
Si $A\preceq B$ y $B\preceq C$, entonces $A\preceq C$.
Demostración.
La función $Id_A$ es una función biyectiva, en paticular es una función inyectiva por lo que podemos concluir que $A\preceq A$.
Supongamos que $A\preceq B$ y $B\preceq C$, esto es, existe $f:A\to B$ inyectiva y $g:B\to C$ inyectiva. Luego, consideremos $g\circ f: A\to C$, como $f$ y $g$ son inyectivas, entonces $g\circ f$ es inyectiva. Así, $A\preceq C$.
$\square$
A continuación probaremos un teorema importante en este curso. Dicho resultado muestra que, dado un conjunto $A$, no existe una función biyectiva de $A$ en el conjunto potencia de $A$, $\mathcal{P}(A)$. Como consecuencia de este teorema, obtenemos que existen conjuntos infinitos que no son equipotentes. Es cierto que no hemos dicho qué es un conjunto infinito, pero de momento puedes entenderlo (de manera informal) como un conjunto que tiene un subconjunto con $n$ elementos para cada $n\in\mathbb{N}$.
Teorema de Cantor.1 Sea $A$ un conjunto, entonces $A\preceq \mathcal{P}(A)$ pero $A\not\sim \mathcal{P}(A)$.
Demostración.
Sea $A$ un conjunto. Si $A=\emptyset$, entonces, $\emptyset$ es una función inyectiva de $A$ en $\mathcal{P}(A)$, por lo que $A\preceq\mathcal{P}(A)$. Supongamos ahora que $A\not=\emptyset$. Luego, $f:A\to \mathcal{P}(A)$ dada por $f(a)=\set{a}$ es una función inyectiva y, por tanto, $A\preceq\mathcal{P}(A)$.
Veamos ahora que no existe una biyección entre $A$ y $\mathcal{P}(A)$. Sea $f:A\to\mathcal{P}(A)$ una función. Para mostrar que $f$ no es una biyección, veamos que no es sobreyectiva. Sea $B=\{x\in A: x\notin f(x)\}$. El conjunto $B$ es un elemento en $\mathcal{P}(A)$, pero no es un elemento en la imagen de $f$. En efecto, supongamos que existe $y\in A$ tal que $f(y)=B$. Dado que $y\in A=B\cup(A\setminus B)$, entonces, $y\in B$ o $y\in A\setminus B$. Si $y\in B$, entonces, $y\notin f(y)=B$, de modo que $y\in B$ y $y\notin B$, lo cual es imposible. Ahora bien, si $y\in A\setminus B$, entonces, $y\notin B=f(y)$ y por consiguiente $y\in B$, lo cual, nuevamente, es imposible. Por lo tanto, $B$ no está en la imagen de $f$ y, en consecuencia, $f$ no es sobreyectiva.
$\square$
Lo siguiente que podemos probar es que si $A$ y $B$ son conjuntos tales que $A\preceq B$ y $B\preceq A$, entonces $A\sim B$. Este resultado corresponde al teorema de Cantor-Schröder-Bernstein que demostraremos en la próxima entrada.
Tarea moral
Los siguientes ejercicios te permitirán aprender más resultados acerca de equipotencia y dominancia.
Sean $n$ y $m$ números naturales. Muestra que $n\leq m$ si y sólo si $n \preceq m$.
Demuestra que si $n$ y $m$ son números naturales distintos, entonces, o bien $n$ domina a $m$ o bien $m$ domina a $n$.
Demuestra que si $A\subseteq B$, entonces $A\preceq B$.
Enuncia formalmente un resultado que diga por qué la noción de «domina a» se comporta como un orden estricto.
De entre las siguientes afirmaciones, decide cuáles son siempre verdaderas y para cuáles hay contraejemplos.
Si $|A|=|B|$ y $|C|=|D|$, entonces $|A\cup B|=|C\cup D|$.
Si $|A|=|B|$ y $|C|=|D|$, entonces $|A\cap B|=|C\cap D|$.
Si $|A|=|B|$ y $|C|=|D|$, entonces $|A\times B|=|C\times D|$.
Más adelante…
En la siguiente entrada probaremos el teorema de Cantor-Schröder-Bernstein. Este teorema nos será de gran utilidad para averiguar si dos conjuntos tienen la misma cantidad de elementos sin tener que exhibir una función biyectiva, tan sólo bastará con dar dos funciones inyectivas.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
También puedes consultar la prueba de este teorema en: Hernández, F., Teoría de Conjuntos, México: Aportaciones Matemáticas No.13, SMM, 1998, p.151. ↩︎
Ahora que hemos definido a la suma en el conjunto de los naturales, podemos definir el producto, pues éste se refiere a sumar cierta cantidad de veces un mismo número. De este modo, el producto se definirá recursivamente en términos de la suma, así como la suma fue definida recursivamente en términos de la función sucesor.
Producto de naturales
Utilizando el teorema de recursión se puede mostrar, al igual que con la operación suma, que existe una única función $\cdot: \mathbb{N}\times\mathbb{N}\to \mathbb{N}$, denotada por $\cdot(m,n)=m\cdot n$, que satisface las siguientes condiciones:
$0\cdot n=0$ para cualquier $n\in \mathbb{N}$,
$s(m)\cdot n= (m\cdot n)+n$.
Dado que seguimos trabajando con conjuntos y hemos definido una nueva operación binaria, podemos preguntarnos si esta operación conmuta, es asociativa o si cumple alguna otra propiedad tal como lo hace el producto cartesiano y la suma en los naturales. Además veremos que esta operación se distribuye con la suma.
Distributividad del producto sobre la suma
Teorema. Para cualesquiera $m,n,k\in \mathbb{N}$, se tiene que $m\cdot(n+k)=m\cdot n+ m\cdot k$.
Demostración. Procederemos por inducción sobre $m$ y dejaremos fijos a $n$ y $k$.
Base de inducción. Si $m=0$, $0\cdot(n+k)=0=0+0=(0\cdot n)+(0\cdot k)$.
Hipótesis de inducción. Supongamos que se cumple para $m$, es decir, $m\cdot(n+k)= (m\cdot n)+(m\cdot k)$.
Paso inductivo. Veamos que se cumple para $m+1$, es decir, $(m+1)\cdot(n+k)=(m+1)\cdot n+(m+1)\cdot k$.
\begin{align*} (m+1)\cdot (n+ k)&=m\cdot (n+ k)+(n+ k) \tag{Definición $\cdot$}\\ &= (m\cdot n+m\cdot k)+(n+ k) \tag{Hipótesis de inducción}\\ &= ((m\cdot n)+n)+((m\cdot k)+k)\tag{Conmutatividad y asociatividad de $+$}\\ &= (m+1)\cdot n+(m+1)\cdot k \tag{Definición $\cdot$}. \end{align*}
Por lo tanto, $m\cdot(n+k)=m\cdot n+m\cdot k$ para cualesquiera $m, n, k\in \mathbb{N}$.
$\square$
Conmutatividad del producto
Para demostrar que el producto es conmutativo primero vamos a demostrar los siguientes lemas:
Lema 1. Para cualquier $n\in \mathbb{N}$, se tiene que $n\cdot 0=0$.
Demostración.
Procederemos por inducción sobre $n$.
Base de inducción. Si $n=0$, tenemos que $0\cdot 0=0$.
Hipótesis de inducción. Supongamos que para algún $k\in \mathbb{N}$ se satisface que $k\cdot 0=0$.
Paso de inductivo. Veamos que se cumple para $k+1$, es decir, $(k+1)\cdot 0=0$.
En álgebra, cuando tenemos una ecuación como la siguiente #$x\cdot z=y\cdot z,$$ siempre que $z\not=0$, concluimos que $x=y$. Esto tiene una justificación y la llamaremos ley de cancelación para el producto. En los naturales se cumple esta ley.
Teorema. Sean $n, m, k\in \mathbb{N}$ con $k\not=0$. Si $n\cdot k=m\cdot k$, entonces $n=m$.
Para probar dicho teorema, utilizaremos la siguiente serie de resultados.
Proposición. Si $n,m\in\mathbb{N}$ son tales que $n\leq m$, entonces, existe $t\in\mathbb{N}$ tal que $n+t=m$.
Demostración (Proposición).
Mostraremos por inducción sobre $m$ que para todo $n\leq m$, existe $t_n\in \mathbb{N}$ tal que $n+t_n=m$.
Base de inducción. $k=0$. Si $n\leq 0$, entonces $n=0$, pues recordemos que dos números naturales $n$ y $m$ satisfacen $n\leq m$ si, y sólo si, $n\in m$ o $n=m$. Así, si $n\leq 0$, entonces $n\in 0$ o $n=0$, pero dado que el enunciado $n\in 0$ no puede ser cierto pues $0=\emptyset$ no tiene elementos, se sigue que $n=0$ tiene que ser verdadero. De este modo, si $n\leq 0$, entonces $n=0$ y tomando $t=0$ se tiene que $n+t=0+0=0$. Por lo tanto, para todo $n\leq 0$ existe $t_n\in\mathbb{N}$ tal que $n+t_n=0$. Por lo tanto, la proposición es cierta para $k=0$.
Hipótesis de inducción. Supongamos que para algún $k\in\mathbb{N}$ se satisface que para todo $n\leq k$, existe $t_n\in\mathbb{N}$ tal que $n+t_n=k$.
Paso inductivo. Veamos que se cumple para $s(k)$. Sea $n\leq s(k)$. Luego, $n\in s(k)$ o $n=s(k)$. Si $n=s(k)$, entonces tomamos $t=0$ y se tiene que $n+t=s(k)+0=s(k)$. Supongamos ahora que $n\in s(k)$.
Como $n\in s(k)$, entonces $n=k$ o $n\in k$, es decir, $n\leq k$. Luego, por hipótesis de inducción, existe $t_n\in\mathbb{N}$ tal que $n+t_n=k$. De este modo, si tomamos $s(t_n)\in\mathbb{N}$ se tiene que $n+s(t_n)=s(t_n)+n=s(t_n+n)=s(k)$.
En cualquier caso para $n$ hemos concluido que existe $t_n\in\mathbb{N}$ tal que $n+t_n=s(k)$.
Por lo tanto, la proposición es verdadera.
$\square$
Proposición. Si $n\in\mathbb{N}$, entonces $n\leq n+t$ para todo $t\in\mathbb{N}$.
Demostración (Proposición).
Sea $n\in\mathbb{N}$. Probaremos por inducción sobre $t$ que $n\leq n+t$ para todo $t\in\mathbb{N}$.
Base. $t=0$. Para $t=0$ tenemos que $n+t=n+0=n$, por lo que es verdad que $n\leq n+t$.
Hipótesis de inducción. Supongamos que para algún $t\in\mathbb{N}$, $n\leq n+t$.
Bajo esta hipótesis veamos que $n\leq n+s(t)$. Primero, notemos que $n+s(t)=s(t)+n$ por la conmutatividad de la suma. Luego, por definición de la suma, $s(t)+n=s(t+n)$. Dado que $s(t+n)=(t+n)\cup\set{t+n}$, entonces $n+t\in s(t+n)$. Ahora bien, por hipótesis de inducción, $n\leq n+t$, es decir, $n=n+t$ o $n\in n+t$. Si $n=n+t$, entonces $n\in s(n+t)$, ya que $n+t\in s(n+t)$, por lo que $n\leq s(n+t)=n+s(t)$.
Ahora, si $n\in n+t$, entonces, $n\in s(n+t)$ por transitividad de la pertenencia en los naturales, por lo que también se cumple que $n\leq n+s(t)$.
En cualquier caso concluimos que $n\leq n+s(t)$, lo que concluye la prueba de la proposición.
$\square$
El último resultado que veremos, antes de iniciar con la demostración de la ley de la cancelación del producto, dice lo siguiente:
Corolario. Si $n\in\mathbb{N}$ es distinto de $0$, entonces $n+t$ es distinto de $0$ para todo $t\in\mathbb{N}$.
Demostración (Corolario).
Sea $n\in\mathbb{N}$ distinto de $0$ y supongamos que $t\in\mathbb{N}$ es arbitrario. Por la proposición anterior, $n\leq n+t$, es decir, $n=n+t$ o $n\in n+t$. Si $n=n+t$, entonces $n+t$ es distinto de $0$ por la hipótesis sobre $n$. Si ahora $n\in n+t$, entonces $n+t$ es distinto de $0$, pues $n+t$ tiene un elemento, el cual es $n$, mientras que el $0$ no tiene elementos. Esto concluye la prueba.
$\square$
Ya que contamos con esta serie de resultados previos podemos dar la demostración de la ley de cancelación del producto.
Demostración (Ley de cancelación del producto).
Supongamos que $n\cdot k = m\cdot k$ con $k \neq 0$. Como el orden $\leq$ es un buen orden en $\mathbb{N}$, entonces es total. Así, $n\leq m$ o $m\leq n$. Haremos el caso $n\leq m$ pues el otro caso es análogo. Como $n\leq m$, existe un natural $t$ tal que $n+t=m$. Como $k\neq 0$, existe un natural $s$ tal que $k=s+1$. De esta manera,
En esta cadena de igualdades hemos usado las propiedades que ya hemos probado de la suma y el producto. Usando ahora la ley de cancelación de la suma, obtenemos que $0=ts+t$. Como aquí hay una suma de naturales igualada a cero, cada sumando es igual a cero. En particular, $t=0$ y por lo tanto $m=n+0=n$, como queríamos.1
$\square$
Tarea moral
La siguiente lista de ejercicios te permitirá reforzar el contenido visto en esta sección:
Demuestra que existe una única función $\cdot: \mathbb{N}\times\mathbb{N}\to \mathbb{N}$, denotada por $\cdot(m,n)=m\cdot n$, que satisface las siguientes condiciones: – $0\cdot n=0$ para cualquier $n\in \mathbb{N}$, – $s(m)\cdot n= (m\cdot n)+n$.
Demuestra que para cualesquiera $m,n,l\in \mathbb{N}$ tal que $l\not=0$, si $m<n$, entonces $l\cdot m<l\cdot n$.
Demuestra que para cualesquiera $m,n\in \mathbb{N}$, si $m\cdot n=0$, entonces $m=0$ o $n=0$.
Usa el teorema de recursión para probar la existencia y unicidad de una función $F:\mathbb{N}\to \mathbb{N}$ que satisfaga lo siguiente: $F(0)=1$, $F(1)=1$, $F(2)=2\cdot 1$, $\vdots$ $F(n)=n\cdot (n-1)\cdots 2\cdot 1$. A la función $F$ se le llama el factorial y la denotamos por $F(n)=n!$.
Usa el teorema de recursión y unicidad para probar para cada natural $n$ la existencia de una función $w_n:\mathbb{N}\to \mathbb{N}$ que cumple $w_n(0)=1$ y $w_n(m+1)=n\cdot w_n(m)$. Usa las funciones $w_n$ para definir la exponenciación en $\mathbb{N}$ como la operación binaria de $\mathbb{N}$ en $\mathbb{N}$ denotada por $n^m=w_n(m)$. Prueba que la exponenciación cumple las siguientes propiedades:
Para todo natural $m>0$, se cumple que $0^m=0$ y $1^m=1$.
Para cualesquiera naturales $l,m,n$, se cumple que $(m\cdot n)^l=m^l\cdot n^l$, que $l^{m+n}=l^m\cdot l^n$ y que $(l^m)^n=l^{m\cdot n}$.
Encuentra todas las soluciones en los naturales a la ecuación $m^2+n=n^2+m$. ¡Ten cuidado! En $\mathbb{N}$ todavía no hemos definido la resta, así que como primer paso no puedes «pasar restando». Todos tus argumentos tendrán que permanecer en lo que hemos construido de $\mathbb{N}$.
Más adelante…
Con esta entrada concluimos el contenido acerca de números naturales. Es lo único que haremos en este curso sobre la construcción de sistemas numéricos, pero todos estos conocimientos sirven para constuir a los enteros y los racionales. Puedes hacer clic en los enlaces para consultar el contenido de la construcción de los números enteros y de los números racionales que se encuentra en el curso de Álgebra Superior II.
Nuestro enfoque continuará siendo conjuntista, y ahora nos enfocaremos en la noción de que dos conjuntos «tengan la misma cantidad de elementos». Así, en la siguiente unidad hablaremos acerca de equipotencia, finitud, infinitud, dominancia y aritmética cardinal. El conjunto de los números naturales jugará un papel clave para esta teoría.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE109323 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 3»
También puedes consultar las pruebas de las propiedades del producto en los naturales en: Hernández, F., Teoría de Conjuntos, México: Aportaciones Matemáticas No.13, SMM, 1998, pp. 106-108. ↩︎
En la entrada anterior definimos a la exponencial compleja y vimos que dicha función extiende a la función exponencial real, por lo que comparten ciertas propiedades. Sin embargo, vimos que esta nueva función cumple propiedades que no se tienen en su versión real, entre ellas la periodicidad, razón por la cual esta función no es inyectiva en $\mathbb{C}$.
Nuestro objetivo en esta entrada será definir a la función logaritmo complejo de tal modo que obtengamos una «función inversa» para la exponencial compleja. Como veremos esta función requerirá cierta sutileza pues será una función multivaluada.
En nuestros cursos de Cálculo y/o Análisis se verifica que para $a>1$ y para toda $x,y\in\mathbb{R}$ se cumple que: \begin{align*} a^x a^y = a^{x+y},\\ \left(a^x\right)^y = a^{xy}. \end{align*}
Además se prueba que la función $f:\mathbb{R}\to\mathbb{R}^+$ dada por $f(x)=a^x$ es biyectiva y se define a su inversa como el logaritmo de $y$ en base $a$, denotado como $\operatorname{log}_{a}(y)$.
Motivados en esto, nos gustaría definir una función inversa para la función exponencial compleja que extienda la definición de la función logaritmo real. Sin embargo, dado que la función exponencial compleja no es inyectiva en $\mathbb{C}$, debemos dar una definición precisa para la función logaritmo complejo, con el fin de evitar cualquier ambigüedad.
Supongamos que queremos resolver la ecuación $ e^w = z$. La primera pregunta que podemos hacernos es si existe solo una solución. Por ejemplo, si planteamos $e^w = i$, no es difícil verificar que $w_1=i\dfrac{\pi}{2}$, $w_2=i\dfrac{5\pi}{2}$ y $w_3 = – i\dfrac{3\pi}{2}$ son soluciones de esta ecuación.
De acuerdo con la proposición 20.3 de la entrada anterior, sabemos que la función exponencial compleja es suprayectiva en $\mathbb{C}\setminus{0}$, por lo que para $z=0$ la ecuación planteada no tendrá solución. Supongamos entonces que $z\neq 0$. Veamos que en tal caso dicha ecuación tiene infinitas soluciones.
Primeramente, recordemos que queremos definir a la función logaritmo complejo, denotada por $\operatorname{log}(z)$, como la inversa de la función exponencial compleja. Para $z\neq 0$, si hacemos $w = \operatorname{log}(z)$, entonces podemos plantear: \begin{equation*} w = \operatorname{log}(z) \quad \Leftrightarrow \quad e^w = z, \end{equation*} para determinar a $w$ en términos de $z$.
Haciendo $w = u +iv$ y $z = r e^{i\theta}$, con $r = |\,z\,| > 0$ y $\theta = \operatorname{Arg}(z)$, entonces tenemos que: \begin{equation*} e^w = z \quad \Longleftrightarrow \quad e^{u+iv} = e^u e^{iv} = re^{i\theta} \quad \Longleftrightarrow \quad \left\{\begin{array}{l} |\,e^w\,| = |\,z\,|\\ \\ \operatorname{arg}\left(e^w\right) = \operatorname{arg}\left(z\right), \end{array} \right. \end{equation*} de donde: \begin{equation*} e^u = r \quad \text{y} \quad v+2\pi n_1 = \theta + 2\pi n_2, \,\,\, n_1, n_2\in\mathbb{Z}. \end{equation*}
De la primera expresión tenemos que $u=\operatorname{ln}(r)$, donde $\operatorname{ln}(x)$ denota la función real logaritmo natural, $x\in\mathbb{R}^+$.
Por otra parte, de la segunda ecuación tenemos que: \begin{equation*} v = \theta + 2\pi k = \operatorname{Arg}(z) + 2\pi k, \quad k = n_2 – n_1\in\mathbb{Z}, \end{equation*} es decir $v = \operatorname{arg}(z)$.
Dado que la función $G(z) = \operatorname{arg}(z)$ es multivaluada, entonces existen infinitas soluciones para la ecuación $e^w = z$, con $z = re^{i\theta}\neq 0$, las cuales están dadas por: \begin{equation*} w = \operatorname{ln}(r) + i \operatorname{arg}(z). \end{equation*}
Lo anterior nos motiva a dar la siguiente:
Definición 21.1. (Logaritmo complejo.) Sea $z\in\mathbb{C}\setminus\{0\}$. Definimos a la función multivaluada logaritmo complejo, denotada por $\operatorname{log}(z)$, como: \begin{align*} \operatorname{log}(z) & = \operatorname{ln}|\,z\,| + i\operatorname{arg}(z)\\ & = \operatorname{ln}(r) + i\left(\theta + 2\pi k\right),\,\,\, k\in\mathbb{Z}, \end{align*} donde $r=|\,z\,|>0$ y $\theta = \operatorname{Arg}(z)$.
Observación 21.1. Notemos que en la definición anterior no es necesario que $\theta$ sea el argumento principal, en realidad basta con que sea cualquier argumento que permita representar a $z\neq 0$ en su forma exponencial, es decir $z = re^{i\theta}$.
Definición 21.2. (Rama principal del logaritmo complejo.) Sea $z\in\mathbb{C}\setminus\{0\}$. Definimos a la rama principal del logaritmo complejo, denotada por $\operatorname{Log}(z)$, como: \begin{equation*} \operatorname{Log}(z) = \operatorname{ln}|\,z\,| + i\operatorname{Arg}(z), \end{equation*} la cual es una función univaluada.
Verificar que $\operatorname{Log}(z)$ es univaluada es sencillo si recordamos la definición 20.3 y la proposición 13.2, ya que si $z = re^{i\theta} \neq 0$, con $r=|\,z\,|$ y $\theta = \operatorname{Arg}(z)$, entonces: \begin{align*} \operatorname{Log}\left(z(r,\theta+2\pi)\right) & = \operatorname{Log}\left(re^{i\theta + 2\pi}\right)\\ & = \operatorname{ln}(r) + i\operatorname{Arg}\left(re^{i\theta + 2\pi}\right)\\ & = \operatorname{ln}(r) + i\left(\theta + 2\pi + 2\pi(-1)\right)\\ & = \operatorname{ln}(r) + i\theta\\ & = \operatorname{Log}\left(re^{i\theta}\right)\\ & = \operatorname{Log}\left(z(r,\theta)\right). \end{align*}
Observación 21.2. Debe ser claro que $\operatorname{Log}(z)$ determina un valor particular de $\operatorname{log}(z)$, para el cual su parte imaginaria es tal que $\operatorname{Arg}(z) \in (-\pi, \pi]$. De acuerdo con la definición 21.1 tenemos que: \begin{equation*} \operatorname{log}(z) = \operatorname{Log}(z) + i2\pi k, \,\,\, k\in\mathbb{Z}, \end{equation*} es decir que los valores de $\operatorname{log}(z)$ difieren de la rama principal en $i2k\pi$.
Ejemplo 21.1. Determinemos los siguientes logaritmos: a) $\operatorname{log}(i)$. b) $\operatorname{log}(5)$. c) $\operatorname{log}(-2)$. d) $\operatorname{Log}\left(\sqrt{3} + i\right)$.
Solución. De acuerdo con la observación 21.2, en los cuatro incisos basta con determinar la rama principal del logaritmo.
a) Sabemos que para $z = i$ tenemos que $|\,z\,| = 1$ y $\operatorname{Arg}(z) = \frac{\pi}{2}$, por lo que: \begin{equation*} \operatorname{Log}(i) = \operatorname{ln}(1) + i \frac{\pi}{2} = 0 + i \frac{\pi}{2} = i \frac{\pi}{2}. \end{equation*}
Entonces: \begin{equation*} \operatorname{log}(i) = \operatorname{Log}(i) + i2\pi k = i \frac{\pi}{2} + i2\pi k = i\left(\frac{\pi}{2} + 2\pi k\right), \quad k\in\mathbb{Z}. \end{equation*}
b) Para $z = 5$ tenemos que $|\,z\,| = 5$ y $\operatorname{Arg}(z) = 0$, por lo que: \begin{equation*} \operatorname{Log}(5) = \operatorname{ln}(5) + i 0 = \operatorname{ln}(5). \end{equation*}
c) Sabemos que para $z = -2$ tenemos que $|\,z\,| = -(-2) = 2$ y $\operatorname{Arg}(z) = \pi$, por lo que: \begin{equation*} \operatorname{Log}(-2) = \operatorname{ln}(2) + i \pi. \end{equation*}
Observación 21.3. Es interesante notar que si $z \in \mathbb{R}^+$, es decir es un número real positivo, la rama principal del logaritmo coincide con la función real logaritmo natural. Sin embargo, el logaritmo complejo de un número real positivo tendrá infinitos valores, como vimos en el ejemplo anterior para $z=5$.
Ejemplo 21.2. Obtengamos todas las soluciones de las siguientes ecuaciones: a) $e^w = -2i$. b) $e^w = 1+i$.
Solución. Notemos que para cada ecuación, el conjunto de soluciones están dados por el logaritmo complejo, es decir $w = \operatorname{log}(z)$.
a) Sea $z = -2i$. Tenemos que $|\,z\,| = \sqrt{(-2)^2} = 2$ y $\operatorname{Arg}(z) = -\frac{\pi}{2}$, entonces: \begin{equation*} \operatorname{Log}\left(-2i\right) = \operatorname{ln}(2) – i \frac{\pi}{2}. \end{equation*}
Por lo que las soluciones de la ecuación $e^w = -2i$ son: \begin{align*} w = \operatorname{log}\left(-2i\right) & = \operatorname{Log}\left(-2i\right) + i2\pi k\\ & = \operatorname{ln}(2) – i \frac{\pi}{2} + i2\pi k\\ & = \operatorname{ln}(2) + i\left(2\pi k – \frac{\pi}{2}\right), \quad k\in\mathbb{Z}. \end{align*}
b) Sea $z = 1+i$. Tenemos que $|\,z\,| = \sqrt{2}$ y: \begin{equation*} \operatorname{Arg}(z) = \operatorname{arctan}(1) = \frac{\pi}{4} \end{equation*}
Por lo que: \begin{equation*} \operatorname{Log}\left(\ 1+i\right) = \operatorname{ln}\left(\sqrt{2}\right) + i \frac{\pi}{4}. \end{equation*}
Entonces, las soluciones de la ecuación $e^w = 1+i$ son: \begin{align*} w = \operatorname{log}\left(1+i\right) & = \operatorname{Log}\left(1+i\right) + i2\pi k\\ & = \operatorname{ln}\left(\sqrt{2}\right) + i \frac{\pi}{4} + i2\pi k\\ & = \operatorname{ln}\left(\sqrt{2}\right) + i\left(\frac{\pi}{4} + 2\pi k\right), \quad k\in\mathbb{Z}. \end{align*}
De acuerdo con la definición 13.4 y la observación 15.4, debe ser claro que es posible definir diferentes ramas del logaritmo al elegir diferentes intervalos semiabiertos donde tome valores el argumento. Es decir, si tomamos a un número $\alpha\in\mathbb{R}$ fijo, entonces podemos trabajar con diferentes ramas de la función multivaluada $G(z) = \operatorname{arg}(z)$, definidas sobre $\mathbb{C} \setminus\{0\}$, que tomen valores en intervalos semiabiertos de la forma $I = (\alpha, \alpha+2\pi]$ ó $I =[\alpha, \alpha+2\pi)$ y dadas por $\operatorname{Arg}_I(z) \in I$.
Definición 21.3. (Rama $I$ del logaritmo complejo.) Sean $\alpha\in\mathbb{R}$ fijo, $z\in\mathbb{C}\setminus\{0\}$ e $I$ un intervalo semiabierto de longitud $2\pi$, es decir de la forma $I = (\alpha, \alpha+2\pi]$ ó $I =[\alpha, \alpha+2\pi)$. Definimos a la rama $I$ del logaritmo complejo, denotada por $\operatorname{Log}_{I}(z)$, como: \begin{equation*} \operatorname{Log}_{I}(z) = \operatorname{ln}|\,z\,| + i\operatorname{Arg}_{I}(z). \end{equation*}
Observación 21.4. Al igual que con la rama principal del logaritmo, notemos que una rama $I$ del logaritmo es una función univaluada desde que hemos restringido al argumento de $z\neq 0$ a ser el único argumento tal que $\alpha < \operatorname{arg} z \leq \alpha + 2\pi$.
Además, a través de la rama $I$ del logaritmo podemos obtener al logaritmo complejo como con la rama principal, observación 21.2, es decir: \begin{equation*} \operatorname{log}(z) = \operatorname{Log}_{I}(z) + i2\pi k, \,\,\, k\in\mathbb{Z}. \end{equation*}
Ejemplo 21.3. Obtengamos el valor de las siguientes ramas del logartimo. a) Sea $\alpha =0$. Para $I=[0,2\pi)$ determina $\operatorname{Log}_{I}\left(-2i\right)$. b) Sea $\alpha =\frac{\pi}{2}$. Para $I=\left(\frac{\pi}{2}, \frac{5\pi}{2}\right]$ determina $\operatorname{Log}_{I}\left(i\right)$. c) Sea $\alpha =\frac{3\pi}{2}$. Para $I=\left(\frac{3\pi}{2}, \frac{7\pi}{2}\right]$ determina $\operatorname{Log}_{I}\left(-2\right)$.
Solución. a) Para $I=[0,2\pi)$, recordemos que se obtiene el argumento natural de un número complejo, entrada 13, por lo que si $z = -2i$, entonces: \begin{equation*} |\,z\,| = \sqrt{(-2)^2} = 2, \quad \operatorname{Arg}_{[0,2\pi)}(z) = \frac{3\pi}{2}. \end{equation*}
Por tanto: \begin{equation*} \operatorname{Log}_{[0,2\pi)}\left(-2i\right) = \operatorname{ln}(2) + i \frac{3\pi}{2}. \end{equation*}
De acuerdo con el ejemplo 21.2(a), notemos que: \begin{equation*} \operatorname{Log}_{[0,2\pi)}\left(-2i\right) \neq \operatorname{Log}(-2i). \end{equation*}
b) De acuerdo con la proposición 13.3, para $I=\left(\frac{\pi}{2}, \frac{5\pi}{2}\right]$ y $z = i$ tenemos que $|\,z\,|=1$ y: \begin{align*} \operatorname{Arg}_{\left(\frac{\pi}{2}, \frac{5\pi}{2}\right]}(z) & = \operatorname{Arg}\left(-ie^{-i\frac{\pi}{2}}\right) + \frac{\pi}{2} + \pi\\ & = \operatorname{Arg}\left(-i(-i)\right) + \frac{3\pi}{2}\\ & = \operatorname{Arg}\left(-1\right) + \frac{3\pi}{2}\\ & =\pi + \frac{3\pi}{2}\\ & = \frac{5\pi}{2}. \end{align*}
Por lo que: \begin{equation*} \operatorname{Log}_{\left(\frac{\pi}{2}, \frac{5\pi}{2}\right]}\left(i\right) = \operatorname{ln}(1) + i \frac{5\pi}{2} = i \frac{5\pi}{2}. \end{equation*}
De acuerdo con el ejemplo 21.1(a), notemos que: \begin{equation*} \operatorname{Log}_{\left(\frac{\pi}{2}, \frac{5\pi}{2}\right]}\left(i\right) \neq \operatorname{Log}(i). \end{equation*}
Por lo que: \begin{equation*} \operatorname{Log}_{\left(\frac{3\pi}{2}, \frac{7\pi}{2}\right]}\left(-2\right) = \operatorname{ln}(2) + i 3\pi. \end{equation*}
De acuerdo con el ejemplo 21.1(c), notemos que: \begin{equation*} \operatorname{Log}_{\left(\frac{3\pi}{2}, \frac{7\pi}{2}\right]}\left(-2\right) \neq \operatorname{Log}(-2). \end{equation*}
Proposición 21.1.(Propiedades del logaritmo.) Para $z_1, z_2, z\in\mathbb{C}\setminus\{0\}$ y $n\in\mathbb{Z}$ se cumple que:
$\operatorname{log}\left(z^n\right) = n \operatorname{log}(z)$.
$e^{\operatorname{log}\left(z\right)} = z$.
$\operatorname{log}\left(e^{z}\right) = z + i 2k\pi$, para $k\in\mathbb{Z}$.
Demostración. Sean $z_1, z_2, z\in\mathbb{C}\setminus\{0\}$ y $n\in\mathbb{Z}$.
Sabemos que para $r_1, r_2>0$ se cumple que: \begin{equation*} \operatorname{ln}\left(r_1 r_2\right) = \operatorname{ln}\left(r_1\right) + \operatorname{ln}\left(r_2\right). \end{equation*} Por otra parte, por la observación 13.6, sabemos que: \begin{equation*} \operatorname{arg}(z_1 z_2) = \operatorname{arg}(z_1) + \operatorname{arg}(z_2). \end{equation*} De acuerdo con lo anterior tenemos que: \begin{align*} \operatorname{log}(z_1 z_2) & = \operatorname{ln}|\,z_1 z_2\,| + i \operatorname{arg}(z_1 z_2)\\ & = \operatorname{ln}\left(|\,z_1\,|\,\,|\,z_2\,| \right)+ i \left[\operatorname{arg}(z_1) + \operatorname{arg}(z_2)\right] \\ & = \operatorname{ln}|\,z_1\,|+ \operatorname{ln}|\,z_2\,| + i \operatorname{arg}(z_1) + i \operatorname{arg}(z_2)\\ & = \operatorname{ln}|\,z_1\,| + i \operatorname{arg}(z_1) + \operatorname{ln}|\,z_2\,| + i \operatorname{arg}(z_2)\\ &=\operatorname{log}(z_1) + \operatorname{log}(z_2). \end{align*}
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Sabemos que para $r>0$ se cumple que: \begin{equation*} \operatorname{ln}\left(r^n\right) = n\operatorname{ln}\left(r\right). \end{equation*} Por otra parte, por la observación 13.6, sabemos que para todo $n\in\mathbb{Z}$ se cumple que: \begin{equation*} \operatorname{arg}\left(z^n\right) = n \operatorname{arg}(z). \end{equation*} Entonces: \begin{align*} \operatorname{log}\left(z^n\right) & = \operatorname{ln}\left|\,z^n\,\right| + i \operatorname{arg}\left(z^n\right)\\ & = \operatorname{ln}\left|\,z\,\right|^n+ i\, n\operatorname{arg}(z)\\ & = n \operatorname{ln}\left|\,z\,\right|+ i\, n\operatorname{arg}(z)\\ & = n \left[\operatorname{ln}\left|\,z\,\right|+ i \operatorname{arg}(z)\right]\\ & = n\operatorname{log}(z). \end{align*}
Sea $z=re^{i\theta}$, con $r=|\,z\,|>0$ y $\theta = \operatorname{arg}(z)$, entonces: \begin{equation*} \operatorname{log}(z) = \operatorname{ln}(r) + i \theta, \end{equation*} por lo que: \begin{equation*} e^{\operatorname{log}\left(z\right)} = e^{\operatorname{ln}(r) + i \theta} = e^{\operatorname{ln}(r)} e^{i \theta} = re^{i \theta} = z. \end{equation*}
Sea $z=x+iy$, entonces $e^z = e^{x}e^{iy}$, por lo que $|\,e^z\,| = e^{x}$ y $\operatorname{arg}\left(e^z\right) = y + 2\pi k$, con $k\in\mathbb{Z}$. Entonces: \begin{align*} \operatorname{log}\left(e^{z}\right) & = \operatorname{ln}\left(e^{z}\right) + i \operatorname{arg}\left(e^{z}\right)\\ & = \operatorname{ln}\left(e^{x}\right) + i\left( y + 2\pi k\right)\\ & = x + iy + i2\pi k\\ & = z + i2\pi k, \quad k\in\mathbb{Z}. \end{align*}
$\blacksquare$
En general, las propiedades anteriores no siempre se cumplen para la rama principal del logaritmo.
Ejemplo 21.5. a) Si $z_1 = i$ y $z_2 =-1$, entonces $z_1 z_2 =-i$, por lo que: \begin{align*} \operatorname{Log}(-i) & = \operatorname{ln}|-i| + i\operatorname{Arg}(-i)\\ & = \operatorname{ln}(1) + i\left(-\frac{\pi}{2}\right)\\ & = – i\frac{\pi}{2}. \end{align*}
Por otra parte: \begin{align*} \operatorname{Log}(-1) & = \operatorname{ln}|-1| + i\operatorname{Arg}(-1)\\ & = \operatorname{ln}(1) + i\left(\pi \right)\\ & = i\pi. \end{align*}
Y del ejemplo 21.1(a) sabemos que $\operatorname{Log}(i) = i\dfrac{\pi}{2}$, por lo que: \begin{equation*} \operatorname{Log}(-i) = – i\frac{\pi}{2} \neq i\frac{3\pi}{2} = \operatorname{Log}(i) + \operatorname{Log}(-1). \end{equation*}
\begin{equation*} \operatorname{Log}\left(z^n\right) = n\, \operatorname{Log}\left(z\right) + i 2\pi N_{n}, \end{equation*} donde $N_n$ es un número entero dado por: \begin{equation*} N_n = \left[ \frac{1}{2} – \frac{n}{2\pi} \operatorname{Arg}(z)\right], \end{equation*} con $[\, x \,]$ la función parte entera de $x$.
Demostración. Se sigue de la proposición 21.1 y la proposición 13.2, por lo que los detalles se dejan como ejercicio al lector.
$\blacksquare$
Ejemplo 21.6. Considerando el corolario anterior y el ejemplo 21.4 tenemos lo siguiente. a) Si $z_1 = i$ y $z_2 =-1$, entonces $\operatorname{Arg}(z_1) = \frac{\pi}{2}$ y $\operatorname{Arg}(z_2) =\pi$, por lo que: \begin{equation*} \operatorname{Arg}(z_1) + \operatorname{Arg}(z_2) = \frac{\pi}{2} + \pi = \frac{3\pi}{2} > \pi. \end{equation*}
b) Si $z = -1$, entonces $\operatorname{Arg}(z) = \pi$, por lo que: \begin{equation*} N_{-1} = \left[\frac{1}{2}-\left(\frac{-1}{2\pi}\right)\pi\right] = \left[1\right] = 1. \end{equation*}
Ejemplo 21.7. Sean $z_1, z_2, \ldots, z_n \in\mathbb{C}$ tales que $\operatorname{Re}(z_k)>0$ y $\operatorname{Re}\left(z_1 z_2 \cdots z_k\right)>0$, para $1\leq k \leq n$. Veamos que: \begin{equation*} \operatorname{Log}\left(z_1 z_2 \cdots z_n\right) = \operatorname{Log}\left(z_1\right) + \cdots + \operatorname{Log}\left(z_n\right). \end{equation*} ¿Son necesarias las condiciones dadas?
Solución. Dadas las hipótesis, como $\operatorname{Re}(z_k)>0$ y $\operatorname{Re}\left(z_1 z_2 \cdots z_k\right)>0$, para $1\leq k \leq n$, entonces: \begin{equation*} \operatorname{Arg}(z_k) = \operatorname{arc tan}\left(\frac{\operatorname{Im}(z_k)}{\operatorname{Re}(z_k)}\right) \in \left(-\frac{\pi}{2}, \frac{\pi}{2}\right), \end{equation*} \begin{equation*} \operatorname{Arg}(b) = \operatorname{arc tan}\left(\frac{\operatorname{Im}(b)}{\operatorname{Re}(b}\right) \in \left(-\frac{\pi}{2}, \frac{\pi}{2}\right), \end{equation*} con $b = z_1 z_2 \cdots z_k$, para $1\leq k \leq n$.
Por lo que: \begin{equation*} \operatorname{Log}(z_k) = \operatorname{ln}|z_k| + i \operatorname{Arg}(z_k), \end{equation*} \begin{equation*} \operatorname{Log}\left(z_1 z_2 \cdots z_k\right) = \operatorname{ln}\left|z_1 z_2 \cdots z_k\right| + i \operatorname{Arg}\left(z_1 z_2 \cdots z_k\right) \end{equation*} para $1\leq k \leq n$.
Procedemos a realizar la prueba por inducción sobre $n$. Primeramente, consideremos el caso $n=2$. Sean $z_1, z_2 \in\mathbb{C}$ bajo las condiciones dadas, entonces: \begin{equation*} -\frac{\pi}{2} < \operatorname{Arg}(z_1) < \frac{\pi}{2}, \quad -\frac{\pi}{2} < \operatorname{Arg}(z_1) < \frac{\pi}{2}, \quad -\frac{\pi}{2} < \operatorname{Arg}(z_1 z_2) < \frac{\pi}{2}, \end{equation*}
Supongamos que el resultado es válido para $n=k-1$. Sean $z_1,\ldots, z_k \in\mathbb{C}$ bajo las condiciones dadas. Entonces: \begin{align*} \operatorname{Log}\left(z_1 z_2 \cdots z_k\right) & = \operatorname{Log}\left(\left[z_1 z_2 \cdots z_{k-1}\right] z_k\right)\\ & = \operatorname{Log}\left(z_1 z_2 \cdots z_{k-1}\right) + \operatorname{Log}\left(z_k\right)\\ & = \operatorname{Log}\left(z_1\right) + \cdots + \operatorname{Log}\left(z_{k-1}\right) + \operatorname{Log}\left(z_k\right). \end{align*}
Por lo que, el resultado es válido para toda $n\in\mathbb{N}^+$ tal que los $z_k \in \mathbb{C}$, con $1\leq k\leq n$, cumplen las condiciones dadas.
Por último veamos que las condiciones dadas son necesarias para que se cumpla el resultado.
Supongamos que no es necesaria la condición $\operatorname{Re}(z_k)>0$, para $1\leq k \leq n$. Sean $z_1 = z_2 = e^{i\frac{2\pi}{3}}$, entonces: \begin{equation*} \operatorname{Arg}(z_1) = \operatorname{Arg}(z_2) = \operatorname{arc tan}\left(-\sqrt{3}\right) + \pi = \frac{2\pi}{3}. \end{equation*}
En este caso la igualdad no se cumple desde que $\operatorname{Re}(z_1 z_2 z_3) < 0$.
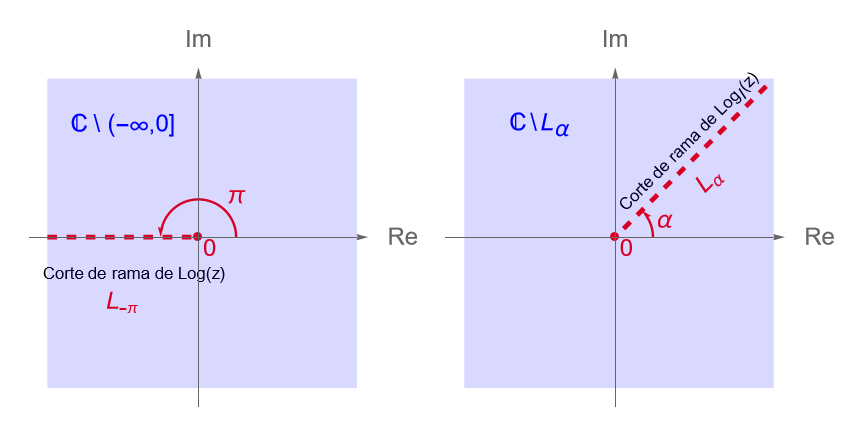
Proposición 21.2. (Continuidad de la rama principal del logaritmo.) Sea $D = \mathbb{C}\setminus(-\infty, 0]$. La rama principal del logaritmo complejo, $f(z) = \operatorname{Log}(z)$, es una función continua para todo $z\in D$. Para $z\in(-\infty, 0]$, las discontinuidades de $\operatorname{Log}(z)$ son irremovibles.
Demostración. Tenemos que la rama principal del logaritmo es: \begin{equation*} f(z) = \operatorname{Log}(z) = \operatorname{ln}|\,z\,| + i\operatorname{Arg}(z), \quad z\neq 0. \end{equation*}
Es claro que dicha función está dada por la suma de dos funciones, por lo que el dominio donde $f$ es continua dependerá de la continuidad de cada una de las funciones que la conforman.
Primeramente, sabemos que la función $|\,z\,|$ determina una función real de variable compleja, la cual es continua para todo $z\in\mathbb{C}$, mientras que la función real logaritmo natural es continua para todo $x>0$, por lo que la composición $\operatorname{ln}|\,z\,|$ será continua para todo $z\neq 0$.
Por otra parte, de acuerdo con el ejemplo 15.5, sabemos que la función $\operatorname{Arg}(z)$ es continua para todo $z\in\mathbb{C}\setminus(-\infty, 0]$. Además, los $z\in(-\infty, 0]$ son discontinuidades irremovibles, por lo que también serán discontinuidades irremovibles de la función $\operatorname{Log}(z)$.
Por lo tanto, $f(z) = \operatorname{Log}(z)$ es una función continua en $\mathbb{C}\setminus(-\infty, 0]$, es decir es una rama de la función multivaluada $F(z) = \operatorname{log}(z)$.
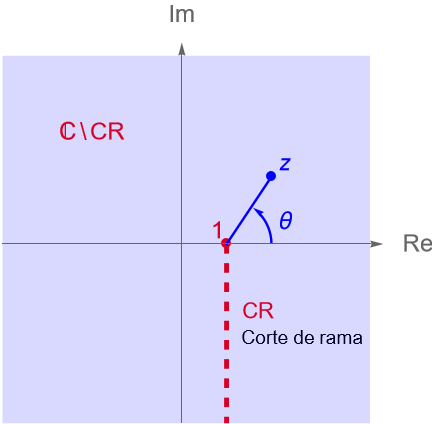
Observación 21.5. Notemos que: \begin{equation*} L_{-\pi} = \left\{re^{-i\pi} : r\geq 0\right\} = \left\{-r : r\geq 0\right\} = (-\infty, 0], \end{equation*} es decir que dicha semirrecta representa el corte de rama de la función $\operatorname{Log}(z)$, figura 79.
Observación 21.6. En general, las ramas definidas en 21.3 serán ramas de la función multivaluada $F(z) = \operatorname{log}(z)$ en el sentido estricto, es decir de acuerdo con la definición 13.2, siempre que se restringa su dominio al conjunto $\mathbb{C} \setminus L_\alpha$, con $ L_{\alpha} = \left\{re^{i\alpha} : r\geq 0\right\}$, pues como vimos en la observación 15.4 la función $\operatorname{Arg}_{I}(z)$ es discontinua en la semirrecta $ L_\alpha$ que parte desde el origen y forma un ángulo $\alpha$ con respecto al eje real positivo. Dicha semirrecta corresponde con el corte de rama de la función $\operatorname{Log}_{I}(z)$, figura 79.
Figura 79: Cortes de rama de las funciones $\operatorname{Log}(z)$ y $\operatorname{Log}_{I}(z)$.
Podemos generalizar lo anterior mediante la siguiente:
Definición 21.4. (Rama del logaritmo.) Si $D\subset \mathbb{C}\setminus\{0\}$ es un dominio y $f:D \to \mathbb{C}$ es una función continua tal que $e^{f(z)} = z$ para todo $z\in D$, entonces diremos que $f$ es una rama del logaritmo en $D$.
Recordemos que definimos al logaritmo complejo como la solución a la ecuación $e^w = z$, es decir como «la inversa» de la exponencial. Sin embargo, de acuerdo con la proposición 21.1(6), sabemos que en general $\operatorname{log}\left(e^z\right) = z + i2\pi k$, para algún $k\in\mathbb{Z}$. Este hecho nos lleva a preguntarnos bajo qué restricciones se cumple que $\operatorname{log}\left(e^z\right) = z$.
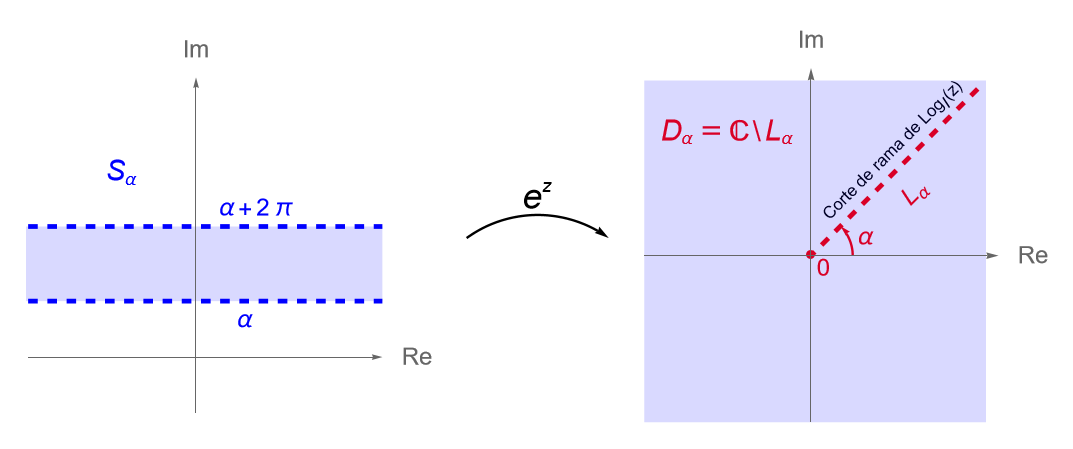
Proposición 21.3. (Inversa de la función exponencial compleja.) Sea $\alpha\in\mathbb{R}$ fijo. Definimos a la banda abierta: \begin{equation*} S_{\alpha} = \left\{z = x+iy \in\mathbb{C} : x\in\mathbb{R}, \,\, \alpha < y <\alpha +2\pi\right\}, \end{equation*} y al plano complejo cortado: \begin{equation*} D_{\alpha} = \mathbb{C} \setminus L_{\alpha} = \left\{w\in\mathbb{C} : |w|>0, \,\, \alpha<\operatorname{arg}(w) < \alpha + 2\pi \right\}, \end{equation*} donde $L_\alpha = \left\{re^{i\alpha} : r\geq 0\right\}$.
Entonces, la función $f:S_{\alpha} \to D_{\alpha}$, dada por $f(z) = e^z$, es biyectiva.
Demostración. Sea $\alpha\in\mathbb{R}$ fijo. Primero probemos la inyectividad.
Sean $z_1 = x_1 + iy_1, z_2 = x_2 + iy_2 \in S_\alpha$ y supongamos que $e^{z_1} = e^{z_2}$, entonces: \begin{equation*} |\,e^{z_1}\,| = |\,e^{z_2}\,|, \quad \operatorname{arg}\left(e^{z_1}\right) = \operatorname{arg}\left(e^{z_2}\right). \end{equation*}
Por lo que $e^{x_1} = e^{x_2}$ y $y_2 = y_1 + 2\pi n$, con $n\in\mathbb{Z}$. Dado que $z_1, z_2 \in S_{\alpha}$, tenemos que $x_1, x_2\in\mathbb{R}$ y $y_1, y_2 \in (\alpha, \alpha + 2\pi)$. Entonces $x_1 = x_2$ y: \begin{equation*} -2\pi < y_2 – y_1 < 2\pi \quad \Longleftrightarrow \quad -2\pi < 2n\pi < 2\pi \quad \Longleftrightarrow \quad n=0, \end{equation*} por lo que $y_1 = y_2$, es decir $z_1 = z_2$.
Verifiquemos ahora la supreyectividad. Sea $w = re^{i\theta}\in D_\alpha$, con $r = |w|>0$ y $\theta = \operatorname{Arg}_{I}(w) \in I$, donde $I=(\alpha, \alpha +2\pi)$. Definimos: \begin{equation*} z = \operatorname{ln}(r) + i\theta. \end{equation*}
Por lo tanto, $f(z) = e^z$ biyecta la banda abierta $S_\alpha$ en el plano complejo cortado $D_\alpha$, figura 80.
$\blacksquare$
Observación 21.7. En la entrada 26 veremos que al considerar a las funciones $f(z) = e^z$ y $g(z) = \operatorname{Log}(z)$ como mapeos, es posible verificar geométricamente las transformaciones del plano complejo dadas en la figura 80.
Observación 21.8. Dado que una rama del logaritmo, definida sobre el plano complejo cortado $D_\alpha$, corresponde con una rama de la función multivaluada $F(z) = \operatorname{log}(z)$, definición 13.2, entonces se sigue del resultado anterior que cualquier rama del logaritmo, bajo dicha restricción, será una inversa de la función exponencial compleja.
Este hecho resulta de suma importancia pues nos dice que la inversa de la función exponencial compleja no es única y que habrá tantas inversas como ramas del logaritmo complejo.
Figura 80: La función exponencial biyecta la banda abierta $S_\alpha$ en el plano cortado $D_\alpha$.
Corolario 21.2. (La rama principal del logaritmo es una inversa de la función exponencial.) La función exponencial compleja, $f(z) = e^z$, definida en la región fundamental: \begin{equation*} S_{-\pi} = \left\{z=x+iy\in\mathbb{C} : x\in\mathbb{R},\,\, -\pi< y <\pi\right\}, \end{equation*} con valores en el plano complejo cortado $D_{-\pi} = \mathbb{C}\setminus(-\infty,0]$, es biyectiva y su inversa es la rama principal del logaritmo.
Demostración. La primera parte del resultado se sigue de la proposición anterior, por lo que solo resta ver que en efecto la rama principal del logaritmo es la inversa de la función exponencial, bajo estas restricciones.
Por la proposición 21.1 es claro que $e^{\operatorname{Log}(z)} = z$. Veamos que $\operatorname{Log}\left(e^z\right) = z$.
Sea $z = x+iy \in S_{-\pi}$, entonces $x\in\mathbb{R}$ y $-\pi < y < \pi$. Tenemos que $e^z = e^x e^{iy}$, por lo que $\left|e^z\right| = e^x $ y $\operatorname{Arg}\left(e^z\right) = y$. Entonces: \begin{equation*} \operatorname{Log}\left(e^z\right) = \operatorname{ln}\left(e^x\right) + i \operatorname{Arg}\left(e^z\right) = x + iy = z. \end{equation*}
$\blacksquare$
Proposición 21.4. (Analicidad de la rama principal del logaritmo.) La rama principal del logaritmo $g(z) = \operatorname{Log}(z)$ es analítica en $D_{-\pi} = \mathbb{C}\setminus(-\infty,0]$ y su derivada es: \begin{equation*} \frac{d}{dz} \operatorname{Log}(z) = \frac{1}{z}, \quad \forall z\in D_{-\pi}. \end{equation*}
Demostración. Del corolario 21.2 se sigue que la función $f: S_{-\pi} \to D_{-\pi}$ dada por $f(z)=e^z$ es biyectiva y su inversa es la función $g:D_{-\pi} \to S_{-\pi}$ dada por $g(z) = \operatorname{Log}(z)$, la cual es continua en $D_{-\pi}$ (proposición 21.2).
Por la proposición 20.1 sabemos que la función $f(z)=e^z$ es entera y que su derivada es $f'(z)=e^z$. Más aún, sabemos por la proposición 20.2(4) que $e^z\neq 0$ para todo $z\in\mathbb{C}$. Por lo que $f$ es una función analítica en $S_{-\pi}$ tal que $f'(g(z)) \neq 0$ para todo $z\in D_{-\pi}$, con $g$ continua en dicho dominio.
Entonces, por el teorema de la función inversa (proposición 16.6), se sigue que $g$ es analítica en $D_{-\pi}$ y su derivada es: \begin{equation*} g'(z) = \frac{1}{f'(g(z))} = \frac{1}{e^{\operatorname{Log}(z)}} = \frac{1}{z}, \quad \forall z\in D_{-\pi}. \end{equation*}
$\blacksquare$
Proposición 21.5. (Analicidad de una rama $I$ del logaritmo.) Sean $\alpha\in\mathbb{R}$ fijo e $I = (\alpha, \alpha+2\pi)$. La rama $\operatorname{Log}_{I} : D_{\alpha} \to S_{\alpha}$ dada por: \begin{equation*} \operatorname{Log}{I}(z) = \operatorname{ln}|z| + i\operatorname{Arg}_{I}(z), \end{equation*} es una función analítica en $D_{\alpha}$ y su derivada es: \begin{equation*} \frac{d}{dz}\operatorname{Log}_{I}(z) = \frac{1}{z},\quad \forall z\in D_{\alpha}. \end{equation*}
Demostración. Su prueba es análoga a la de la proposición 21.3, por lo que se deja como ejercicio al lector.
$\blacksquare$
De manera general tenemos que:
Proposición 21.6. Sean $D\subset \mathbb{C}\setminus\{0\}$ un dominio y $L:D \to \mathbb{C}$ una rama del logaritmo en $D$. Entonces $L$ es analítica en $D$ y $L'(z) = 1/z$ para todo $z\in D$.
Demostración. Dadas las hipótesis, como $L$ es una rama del logaritmo en $D$, entonces por la definición 21.4 tenemos que: \begin{equation*} e^{L(z)} = z, \quad \forall z\in D. \end{equation*}
Dado que la función $f(z)=e^z$ es entera y $f'(z)=e^z\neq 0$ para todo $z\in \mathbb{C}$, entonces si restringimos $f:L(D) \to \mathbb{C}$, es claro que $f$ y $L$ serán inversas, por lo que se sigue del teorema de la función inversa (proposición 16.6) que $L$ es analítica en $D$ y su derivada está dada por: \begin{equation*} L'(z) = \frac{1}{f'(L(z))} = \frac{1}{e^{L(z)}} = \frac{1}{z}, \quad \forall z\in D. \end{equation*}
$\blacksquare$
Ejemplo 21.8. Estudiemos la analicidad de las siguientes funciones y obtengamos su derivada. a) $f(z) = \operatorname{Log}(z-i)$. b) $f(z) = \dfrac{\operatorname{Log}(z+4)}{z^2+i}$.
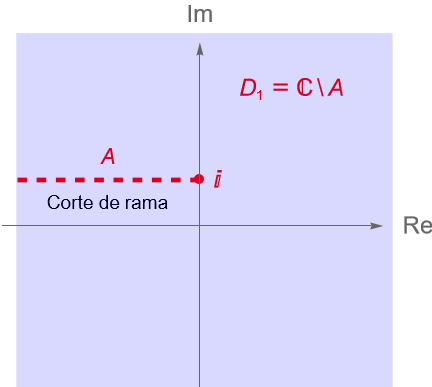
Solución. a) Sabemos que la función $g(w) = \operatorname{Log}(w)$ es analítica en el dominio $D=\mathbb{C}\setminus(-\infty, 0]$. Procedemos a determinar el corte de rama de $f$. Sea $w = z – i$, con $z=x+iy \in \mathbb{C}$, entonces: \begin{equation*} w \in (-\infty,0] = L_{-\pi} = \left\{-r \in \mathbb{C} : r \geq 0\right\} \quad \Longleftrightarrow \quad w\in \left\{w\in\mathbb{C} : \operatorname{Re}(w) \leq 0, \,\, \operatorname{Im}(w) = 0\right\}. \end{equation*}
Por lo que, el corte de rama de $f$ está dado por las condiciones: \begin{equation*} \left\{ \begin{array}{l} \operatorname{Re}(z-i) = x \leq 0,\\ \\ \operatorname{Im}(z-i) = y-1 = 0, \end{array} \right. \quad \Longrightarrow \quad \left\{ \begin{array}{l} x \leq 0,\\ \\ y=1. \end{array} \right. \end{equation*}
Es decir, el corte de rama de $f$ es el conjunto: \begin{equation*} A = \left\{z=x+iy\in\mathbb{C} : x\leq 0,\,\, y = 1\right\}. \end{equation*}
Entonces, $f$ es analítica en el dominio $D_1 = \mathbb{C} \setminus A$, figura 81(a).
Dado que $f = g\circ h$, con $g(z) = \operatorname{Log}(z)$ y $h(z) = z-i$, entonces por la regla de la cadena tenemos que: \begin{equation*} \frac{d}{dz}\operatorname{Log}(z-i) = g'(h(z)) h'(z) = \frac{1}{z-i}, \quad \forall z\in D_1. \end{equation*}
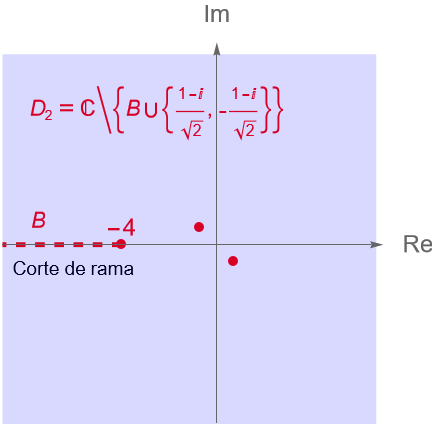
b) Dado que $f$ es una función racional, es claro que los puntos donde el denominador se anule no serán elementos del dominio de analicidad de $f$. Tenemos que: \begin{equation*} z^2+i = 0 \quad \Longleftrightarrow \quad z = \pm \sqrt{1} e^{-i\frac{\pi}{4}} = \pm \frac{\sqrt{2}}{2}\left(1-i\right). \end{equation*}
Por otra parte, procediendo como en el inciso anterior, para $w=z+4$, con $z=x+iy\in\mathbb{C}$, tenemos que las condiciones que determinan el corte de rama de $f$ son: \begin{equation*} \left\{ \begin{array}{l} \operatorname{Re}(z+4) = x +4 \leq 0,\\ \\ \operatorname{Im}(z+4) = y = 0, \end{array} \right. \quad \Longrightarrow \quad \left\{ \begin{array}{l} x \leq -4,\\ \\ y=0. \end{array} \right. \end{equation*}
De donde se sigue que el corte de rama de $f$ es el conjunto: \begin{equation*} B = \left\{z=x+iy\in\mathbb{C} : x\leq-4,\,\, y=0 \right\}. \end{equation*}
Por lo que, al tener los puntos donde $f$ no está definida y el corte de rama del númerador, concluimos que $f$ es analítica en el dominio, figura 81(b): \begin{equation*} D_2 = \mathbb{C} \setminus \left\{ B \cup \left\{ \frac{\sqrt{2}}{2}\left(1-i\right), \frac{\sqrt{2}}{2}\left(i-1\right)\right\}\right\}. \end{equation*}
Procedemos a obtener la derivada de $f$ utilizando las reglas de derivación y la regla de la cadena, entonces: \begin{align*} \frac{d}{dz}f(z) &= \frac{\left[\frac{d}{dz} \operatorname{Log}(z+4)\right] – \left[\frac{d}{dz}(z^2+i)\right]\operatorname{Log}(z+4)}{(z^2+i)^2}\\ & = \frac{\left[\frac{1}{z+4}\right] -\left[2z\right]\operatorname{Log}(z+4)}{(z^2+i)^2}\\ & = \frac{z^2+i-2z(z+4)\operatorname{Log}(z+4)}{(z^2+i)^2(z+4)}, \quad \forall z\in D_2. \end{align*}
Figura 81: Dominios de analicidad de las funciones del ejemplo 21.8.
(a) Dominio de analicidad $D_1$ de la función $\operatorname{Log}(z-i)$.(b) Dominio de analicidad $D_2$ de la función $\dfrac{\operatorname{Log}(z+4)}{z^2+i}$.
Proposición 21.7. Sean $D\subset \mathbb{C}\setminus\{0\}$ un dominio y $f:D \to \mathbb{C}$ una función analítica. Entonces $f$ es una rama del logaritmo si y solo si $f'(z) = 1/z$ para todo $z\in D$ y $e^{f(a)} = a$ para al menos un $a \in D$.
Demostración. Dadas las hipótesis.
$\Rightarrow)$
Supongamos que $f$ es una rama del logaritmo, entonces por definición: \begin{equation*} e^{f(z)} = z, \quad \forall z \in D. \end{equation*}
Claramente $e^{f(a)} = a$ para al menos un $a\in D$.
Por otra parte, dado que $f$ es analítica en $D$, tenemos que la función $e^{f(z)}$ es analítica en $D$, entonces derivando de ambos lados de la igualdad, por la regla de la cadena, tenemos que: \begin{equation*} e^{f(z)} \cdot f'(z) = 1 \quad \Rightarrow \quad f'(z) = \frac{1}{e^{f(z)}}, \end{equation*}
por lo que: \begin{equation*} f'(z) = \frac{1}{z}, \quad \forall z\in D. \end{equation*}
$(\Leftarrow$
Supongamos que $f'(z) = 1/z$ para todo $z\in D$ y que existe $a\in D$ tal que $e^{f(a)} = a$. Veamos que $f$ es una rama del logaritmo.
Definimos a la función $g(z) = z \cdot e^{-f(z)}$. Claramente $g$ es una función analítica en $D$ y por tanto diferenciable. Entonces para todo $z\in D$ se cumple que: \begin{align*} g'(z) & = \frac{d}{dz} \left( z e^{-f(z)} \right)\\ & = e^{-f(z)} \dfrac{dz}{dz} + z \frac{d}{dz}\left( e^{-f(z)}\right)\\ & = e^{-f(z)} – z e^{-f(z)} f'(z)\\ & = e^{-f(z)} – z e^{-f(z)} \left(\frac{1}{z}\right)\\ & = e^{-f(z)} – e^{-f(z)}\\ & = 0, \end{align*} por lo que $g$ es una función constante, es decir: \begin{equation*} g(z) = k, \quad k\in\mathbb{C}. \end{equation*}
Procedemos a determinar el valor de dicha constante. Sea $z = a$, entonces: \begin{equation*} g(a) = a \cdot e^{-f(a)} = k. \end{equation*}
por lo tanto: \begin{equation*} k = a \cdot e^{-f(a)} = a \left(\frac{1}{a} \right) = 1. \end{equation*}
Se sigue que $g(z) = 1$, es decir: \begin{equation} z \cdot e^{-f(z)} = 1, \end{equation*} de donde: \begin{equation*} e^{f(z)} = z, \quad \forall z\in D, \end{equation*} por lo que $f$ es una rama del logaritmo.
$\blacksquare$
Proposición 21.8. Sean $D\subset \mathbb{C}\setminus\{0\}$ un dominio y $L:D \to \mathbb{C}$ una rama del logaritmo en $D$. Entonces, todas las ramas del logaritmo en $D$ son de la forma: \begin{equation*} l(z) = L(z) + i2\pi k, \quad k\in\mathbb{Z} \tag{21.1}. \end{equation*}
Demostración. Dadas las hipótesis, primeramente notemos que para $k\in\mathbb{Z}$ la función $l(z)$ dada en (21.1) es continua en $D$ y: \begin{equation*} e^{l(z)} = e^{L(z) + i2\pi k} = e^{L(z)}e^{i2\pi k} = e^{L(z)} = z, \end{equation*} es decir que $l(z)$ define otra rama del logaritmo en $D$.
Supongamos que $l:D\to\mathbb{C}$ es otra rama del logaritmo en $D$, distinta de $L$. Entonces para todo $z\in D$ tenemos que: \begin{equation*} e^{L(z) – l(z)} = \frac{e^{L(z)}}{e^{l(z)}} = \frac{z}{z} = 1. \end{equation*}
De acuerdo con la proposición 20.2(10), lo anterior implica que $L(z) – l(z) = i2k\pi$, para algún $k\in\mathbb{Z}$. Notemos que el mismo $k\in\mathbb{Z}$ funciona para todo $z\in D$, ya que si definimos a la función: \begin{equation*} k(z) = \frac{L(z) – l(z)}{i2\pi}, \end{equation*} es claro que $k(z)$ es una función continua en $D$ y su imagen es un subconjunto de $\mathbb{Z}$. Dado que $D$ es conexo y $k(z)$ es continua, entonces por la proposición 10.3 tenemos que $k(D)$ es un conjunto conexo, por lo que $k(D) = \left\{k\right\}$ para un único $k\in\mathbb{Z}$ tal que $l(z) = L(z) + i2k\pi$ para todo $z\in D$. Es decir, dos ramas del logaritmo en $D$ difieren a lo más en un múltiplo entero de $2\pi i$, por lo que su diferencia es constante, de donde se sigue el resultado.
$\blacksquare$
Ejemplo 21.9. Determinemos los puntos de ramificación de la función multivaluada $F(z) = \operatorname{log}(z^2-1)$.
Solución. Primeramente notemos que la función multivaluada: \begin{equation*} G(w) = \operatorname{log}(w) = \operatorname{ln}|w| + i \operatorname{arg}(w), \end{equation*} no está definida para $w = 0$, por lo que tiene sentido que dicho punto sea un punto de ramificación de $G$, lo cual es claro desde que $w=0$ es un punto de ramificación de la función multivaluada $\operatorname{arg}(w)$, pues siempre que un punto arbitrario de una vuelta completa alrededor de dicho punto, su argumento habrá aumentado en $2\pi$ y por tanto habrá cambiado de rama del argumento.
Procediendo como en el ejemplo 13.15, si tomamos un punto $z_0$ sobre una circunferencia con centro en el punto $z=1$ y de radio lo suficientemente pequeño como para que el punto $z=-1$ sea exterior a ella, entonces tenemos que: \begin{equation*} F(z_0) = \operatorname{ln}(r_1) + \operatorname{ln}(r_2) + i(\theta_1 + \theta_2). \end{equation*}
Si el punto $z_0$ da una vuelta alrededor de $z=1$, entonces solo el argumento de $z_0-1$ se verá modificado, es decir: \begin{equation*} F(z_0) = \operatorname{ln}(r_1) + \operatorname{ln}(r_2) + i(\theta_1 + + 2\pi + \theta_2), \end{equation*} por lo que $F$ cambio de rama. Entonces $z=1$ es un punto de ramificación de $F$.
De manera análoga podemos concluir que $z=-1$ también es un punto de ramificación de $F$.
A diferencia del ejemplo 13.15, en este caso el punto $z_\infty = \infty$ sí será un punto de ramificación de $F$.
Entonces, es claro que $z=0$ es un punto de ramificación de $F(1/z)$, por lo que $z_\infty = \infty$ será también un punto de ramificación de $F(z)$.
Al igual que en el caso real, podemos utilizar a las funciones complejas exponencial y logaritmo para definir a las potencias complejas. Recordemos que para todo $a>0$ y $b\in\mathbb{R}$, definimos a la potencia real de base $a$ y exponente $b$ como $a^b = e^{b \operatorname{ln}(a)}$.
Sabemos que para todo $z\neq 0$ se cumple que: \begin{equation*} z = e^{\operatorname{log}(z)}, \end{equation*} pero como la función $\operatorname{log}(z)$ es multivaluada, entonces existen infinitos logaritmos de $z$, tantos como múltiplos enteros de $i2\pi$, pues: \begin{equation*} \operatorname{log}(z) = \operatorname{Log}(z) + i2\pi k, \quad k\in\mathbb{Z}. \end{equation*}
Considerando lo anterior, tenemos la siguiente:
Definición 21.5. (Potencias complejas.) Sean $a\in\mathbb{C}$ y $z\in\mathbb{C}\setminus\{0\}$. Definimos a la potencia compleja, de base $z$ y exponente $a$, como: \begin{equation*} z^{a} = e^{a \operatorname{log}(z)}. \end{equation*}
Observación 21.9. En general, la potencia compleja de $z\neq 0$ define a una función multivaluada, por lo que, al elegir una rama del logaritmo complejo obtendremos una función univaluada a la cual llamaremos rama de la potencia compleja. En particular, si elegimos a la rama principal del logaritmo entonces obtendremos el valor principal o la rama principal de $z^{a}$, es decir: \begin{equation*} z^{a} = e^{a \operatorname{Log}(z)}. \end{equation*}
Por otra parte, si elegimos a una rama $I$ del logaritmo, entonces obtenemos la rama $I$ de $z^{a}$, es decir: \begin{equation*} z^{a} = e^{a \operatorname{Log}_{I}(z)}. \end{equation*}
Recordemos que para hablar de ramas de una función multivaluada debemos tener funciones continuas, por lo que, de acuerdo con los resultados previos, bastará con tomar intervalos abiertos $I$ de longitud $2\pi$, es decir de la forma $I=(\alpha, \alpha+2\pi)$, con $\alpha\in \mathbb{R}$ fijo, para garantizar que la rama del logaritmo elegida sea en efecto continua.
Ejemplo 21.10. Determinar todos los valores de las siguientes potencias complejas. a) $1^i$. b) $(-2)^i$. c) $i^{-2i}$.
Solución. a) Dado que $|1| = 1$ y $\operatorname{Arg}(1) = 0$, entonces: \begin{align*} \operatorname{Log}(1) & = \operatorname{ln}(1) + i \operatorname{Arg}(1)\\ & = 0 + i 0\\ & = 0, \end{align*} de donde $\operatorname{log}(1) = \operatorname{Log}(1) + i2\pi k = i2\pi k$, con $k\in\mathbb{Z}$. Entonces: \begin{equation*} 1^i = e^{i \operatorname{log}(1)} = e^{-2\pi k}, \quad k\in\mathbb{Z}. \end{equation*}
b) De acuerdo con el ejercicio 21.1(c) sabemos que $\operatorname{log}(-2) = \operatorname{ln}(2) + i\left(\pi + 2\pi k\right)$, con $k\in\mathbb{Z}$. Entonces: \begin{equation*} (-2)^i = e^{i \operatorname{log}(-2)} = e^{i\operatorname{ln}(2)} e^{-\left(\pi + 2\pi k\right)}, \quad k\in\mathbb{Z}. \end{equation*}
c) Por el ejercicio 21.1(a) sabemos que $\operatorname{log}(i) = i\left(\frac{\pi}{2} + 2\pi k\right)$, con $k\in\mathbb{Z}$. Entonces: \begin{equation*} i^{-2i} = e^{-2i \operatorname{log}(i)} = e^{2\left(\frac{\pi}{2} + 2\pi k\right)} = e^{(4k + 1)\pi}, \quad k\in\mathbb{Z}. \end{equation*}
Es interesante notar que las potencias complejas no siempre devuelven valores complejos, como es el caso de los incisos a) y c) del ejemplo anterior, cuyos valores son siempre números reales.
Ejemplo 21.11. Para $z=-i$ y $a=1+i$, calculemos las siguientes potencias complejas. a) Si $I=(-\pi, \pi)$, determinar el valor de $z^a$. b) Si $I=(0, 2\pi)$, determinar el valor de $z^a$. c) Determinar todos los valores de $z^a$.
Solución. a) Si $I=(-\pi,\pi)$, entonces estamos considerando a la rama principal del logaritmo. Para $z=-i$ y $a=1+i$, tenemos que $|z| = 1$ y $\operatorname{Arg}(z) = -\frac{\pi}{2}$, por lo que: \begin{equation*} \operatorname{Log}(-i) = \operatorname{ln}(1) + i\left(-\frac{\pi}{2}\right) = -i\frac{\pi}{2}. \end{equation*}
b) Si $I=(0, 2\pi)$, entonces estamos considerando la rama natural del argumento, por lo que para $z=-i$ tenemos que $\operatorname{Arg}_{(0, 2\pi)}(z) = \frac{3\pi}{2}$. Entonces: \begin{equation*} \operatorname{Log}_{I}(-i) = \operatorname{ln}(1) + i\left(\frac{3\pi}{2}\right) = i\frac{3\pi}{2}. \end{equation*}
Por lo que: \begin{align*} (-i)^{1+i} & = e^{(1+i) \operatorname{Log}_{I}(-i)}\\ & = e^{(1+i)\left(i\frac{3\pi}{2}\right)}\\ & = e^{i\frac{3\pi}{2}}e^{-\frac{3\pi}{2}}\\ & = -i e^{-\frac{3\pi}{2}}. \end{align*}
Claramente $-i e^{-\frac{3\pi}{2}} \neq -i e^{\frac{\pi}{2}}$, por lo que el valor de $(-i)^{1+i}$ es distinto al considerar estas dos ramas del logaritmo.
c) De acuerdo con el inciso a) tenemos que: \begin{equation*} \operatorname{log}(-i) = \operatorname{Log}(-i)+i2\pi k = i\frac{\pi}{2}\left(4k-1\right), \quad k\in\mathbb{Z}. \end{equation*}
En particular si $k=1$ obtenemos la rama del inciso b) y si $k=0$ obtenemos la rama del inciso a).
En la observación 21.8 hemos mencionado que en general la función $z^a$, con $z\neq 0$, corresponde con una función multivaluada, por lo que podemos preguntarnos bajo qué condiciones no lo es. Para responder esta pregunta notemos que para $z\neq 0$ y $a\in\mathbb{C}$ se cumple que: \begin{equation*} z^a = e^{a\operatorname{log}(z)} = e^{a\left(\operatorname{Log}(z) + i2\pi k\right)} = e^{a\operatorname{Log}(z)}e^{i2a\pi k}, \quad k\in\mathbb{Z}. \end{equation*}
Por lo que, para determinar el número de valores distintos que toma $z^a$ basta con determinar el número de valores distintos que toma $e^{i2a\pi k}$, con $k\in\mathbb{Z}$. Planteamos los siguientes casos:
Si $a \in\mathbb{Z}$. Si $a$ es un entero tenemos que la expresión $i2a\pi k$ determina un múltiplo entero de $i2\pi$. Entonces, por la proposición 20.2(10), se tiene que $e^{i2a\pi k} = 1$ para todo $k\in\mathbb{Z}$, de donde se concluye que $z^a$ determina un único valor, es decir es una función univaluada, lo cual es concordante con las funciones de la forma $z^n$, con $n\in\mathbb{Z}$, es decir las potencias enteras.
Si $a \in \mathbb{Q}$. Si $a$ es un número real racional entonces se puede escribir de la forma $a = \frac{p}{q}$, con $p,q\in\mathbb{Z}$, $q\neq 0$, coprimos. Por lo que, la expresión $e^{i2a\pi k} = e^{i2\pi \frac{pk}{q}}$ tendrá exactamente $q$ valores distintos para $k = 0, 1, \ldots, q-1$ (observación 5.4, entrada 5). Entonces, para cada valor de $k \in \left\{0, 1, \ldots, q-1\right\}$ obtendremos una potencia compleja distinta, es decir una función de la forma: \begin{equation*} z^{\frac{p}{q}} = e^{\frac{p}{q} \operatorname{Log}(z)} e^{i2\pi\frac{pk}{q}}, \end{equation*} correspondiente con una rama de la función $z^{\frac{p}{q}}$. En particular, para $k=0$ obtendremos la rama principal de la función multivaluada $z^{\frac{p}{q}}$. Es claro que el caso 1 es un caso particular del caso 2 tomando $q=1$.
Si $a \in \mathbb{R}\setminus\mathbb{Q}$ ó $a\in\mathbb{C}\setminus\mathbb{R}$. En este caso tenemos que $a$ puede ser un número real irracional o un número complejo cuya parte imaginaria es distinta de cero. Veamos que en cualquiera de estos casos los valores de la expresión $e^{i2a\pi k}$ serán distintos para todo $k\in\mathbb{Z}$. Supongamos que $a \in \mathbb{R}\setminus\mathbb{Q}$ y que: \begin{equation*} e^{i2a\pi k} = e^{i2a\pi j}, \quad k,j\in\mathbb{Z}, \tag{21.2} \end{equation*} entonces: \begin{equation*} e^{i2a\pi k – i2a\pi j} = e^{i2a\pi(k -j)} = 1, \quad k,j\in\mathbb{Z}, \end{equation*} pero lo anterior se cumple si y solo si $a(k -j) \in\mathbb{Z}$, lo cual claramente no es posible pues $a$ es un número irracional. Por lo que, la igualdad en (21.2) no se cumple para ningunos enteros $k$ y $j$, es decir que $z^a$ tendrá un número infinito de valores. Supongamos ahora que $a = x+iy$, con $y\neq 0$, entonces: \begin{equation*} e^{i2a\pi k} = e^{i2\pi k(x+iy)} =e^{i2\pi k x} e^{-2\pi k y}, \quad k\in\mathbb{Z}, \end{equation*} de donde es claro que la expresión $e^{-2\pi k y}$ determina una infinidad de valores distintos para cada $k\in\mathbb{Z}$, por lo que de nueva cuenta $z^a$ tendrá un número infinito de valores. Al igual que en el caso 2, cada valor de $k$ determina una rama distinta de la función $z^a$, sin embargo en este caso se tendrá una infinidad de ramas distintas.
Observación 21.10. Notemos que nuestra definición de potencia compleja es inconsistente con nuestra definición de la exponencial compleja $e^z$. Si tomamos $z=e$ y $a = z’\in\mathbb{C}$, entonces: \begin{equation*} e^{z’} = e^{z’\operatorname{log}(e)} = e^{z’\operatorname{ln}(e)} e^{i2\pi z’k} = e^{z’} e^{i2\pi z’k}, \quad k\in\mathbb{Z}, \end{equation*} la cual es, en general, una función multivaluada. Por tal motivo, siempre que utilicemos la expresión $e^z$ nos referiremos a la función univaluada exponencial compleja.
Para formalizar lo anterior tenemos la siguiente:
Definición 21.6. (Ramas principales de las funciones $b^z$ y $z^a$.) Sean $a\in\mathbb{C}$ y $b\in \mathbb{C}\setminus\{0\}$. Definimos a la función univaluada exponencial compleja de base $b$ como: \begin{equation*} \operatorname{exp}_b(z) = b^z = e^{z\operatorname{Log}(b)}, \quad z\in\mathbb{C}, \end{equation*} la cual corresponde con la rama principal de la función multivaluada $b^z$.
Por otra parte, definimos a la función multivaluada potencia compleja, de exponente $a$, como: \begin{equation*} z^a = e^{a\operatorname{log}(z)}, \quad z\in\mathbb{C}\setminus\{0\}. \end{equation*}
Observación 21.11. Es importante mencionar que en general, no todas las propiedades de las potencias reales con las que estamos familiarizados, se cumplen para el caso complejo.
Sean $a,b\in\mathbb{C}$, $z_1, z_2 \in\mathbb{C}\setminus\{0\}$ y $n\in\mathbb{Z}$, en general, no siempre se cumple que:
$\left(z_1 z_2\right)^a = z_1^a z_2^a$.
$\left(z_1\right)^{a+b} = z_1^a z_1^b$.
$ z_1^{a-b} = \dfrac{z_1^a}{z_1^b}$.
$\left(z_1^a\right)^{n} = z_1^{na}$.
$\left(z_1^a\right)^{b} = z_1^{ba}$.
Ejemplo 21.12. a) Sean $z_1=z_2= – 1$ y $a = 1/2$. Considerando a la rama principal de la función multivaluada $z^a$, tenemos que: \begin{equation*} (z_1 z_2)^a = 1^{1/2} = e^{\frac{1}{2}\left(\operatorname{Log}(1)\right)} = e^0 =1, \end{equation*}
pero: \begin{equation*} z_1^a = z_2^a = (-1)^{1/2} = e^{\frac{1}{2}\left(\operatorname{Log}(-1)\right)} = e^{i\frac{\pi}{2}} = i, \end{equation*} de donde $(z_1 z_2)^a = 1 \neq -1 = z_1^a z_2^a$.
De donde se sigue que $ \left(z_1^a\right)^b \neq z_1^{ab}$ para todo $n\in\mathbb{Z}$, con $n\neq 0$.
En este caso, notemos que para $a=b=i$ y $z_1 \neq 0$, $z_1^{ab}$ define una función univaluada, mientras que $\left(z_1^a\right)^{b}$ determina una función multivaluada.
Proposición 21.9. (Analicidad de las ramas principales de $z^a$ y $b^z$.) Sean $a\in\mathbb{C}$ y $b\in\mathbb{C}\setminus\{0\}$. La rama principal de la función multivaluada $z^a$, es decir: \begin{equation*} f(z) = z^a = e^{a\operatorname{Log}(z)}, \end{equation*} es analítica en $D = \mathbb{C}\setminus(-\infty, 0]$ y su derivada es: \begin{equation*} \frac{d}{dz} z^a = az^{a-1}, \quad \forall z\in D. \end{equation*}
Mientras que la rama principal de la función multivaluada $b^z$, es decir: \begin{equation*} \operatorname{exp}_b(z) = b^z = e^{z\operatorname{Log}(b)}, \end{equation*} es entera y su derivada es: \begin{equation*} \frac{d}{dz} b^z = b^z\operatorname{Log}(b), \quad \forall z\in \mathbb{C}. \end{equation*}
Demostración. Dadas las hipótesis, primeramente notemos que la rama principal de la función multivaluada $z^a$ está dada como la composición de las funciones $g(z) = e^z$ y $h(z) = a \operatorname{Log}(z)$, de las cuales $g$ es una función entera y $h$ es analítica en el dominio $D = \mathbb{C}\setminus(-\infty, 0]$, por lo que $f=g\circ h$ también será analítica en $D$ y podemos obtener su derivada mediante la regla de la cadena, es decir para todo $z\in D$ tenemos que: \begin{equation*} \frac{d}{dz} z^a = \frac{d}{dz} g(h(z)) = g'(h(z)) h'(z) = e^{a \operatorname{Log}(z)} \left(\frac{a}{z}\right) = z^a\left(\frac{a}{z}\right) = az^{a-1}. \end{equation*}
Análogamente, notemos que la rama principal de la función multivaluada $b^z$ está dada como la composición de las funciones $g(z) = e^z$ y $h(z) = z \operatorname{Log}(b)$, las cuales son funciones enteras, por lo que $\operatorname{exp}_b = g \circ h$ también es una función entera. Entonces, utilizando la regla de la cadena, para todo $z\in \mathbb{C}$ tenemos que: \begin{equation*} \frac{d}{dz} b^z = \frac{d}{dz} g(h(z)) = g'(h(z)) h'(z) = e^{z \operatorname{Log}(b)} \left(\operatorname{Log}(b)\right) = b^z\operatorname{Log}(b). \end{equation*}
$\blacksquare$
Ejemplo 21.13. Determinemos la rama $f$ de la función multivaluada $F(z) = \sqrt[4]{z-i}$ para la cual $f(1+i)=1$ y calculemos $f(0)$, $f(1)$, $f(-1)$. Veamos donde es analítica $f$ y obtengamos su derivada.
Entonces, para cada valor de $k$ obtendremos una rama diferente de $F$.
Dado que $\operatorname{Log}(1) = 0$, entonces: \begin{equation*} f(1+i) = F_k(1+i) = e^{\frac{1}{4} \operatorname{Log}(1)} e^{i2\pi \frac{k}{4}} = 1 \quad \Longleftrightarrow \quad k =0, \end{equation*} por lo que la rama buscada es la función: \begin{equation*} f(z):= F_0(z) = e^{\frac{1}{4} \operatorname{Log}(z-i)}. \end{equation*}
Por último, de acuerdo con el ejemplo 21.7(a) sabemos que la función $h(z) = \frac{1}{4}\operatorname{Log}(z-i)$ es analítica en el dominio, figura 81(a): \begin{equation*} D = \mathbb{C} \setminus \left\{z=x+iy\in\mathbb{C} : x\leq 0, y =1\right\}. \end{equation*}
Por lo que, al ser $f = g \circ h$, es decir la composición de $g(z) = e^z$ y $h(z) = \frac{1}{4}\operatorname{Log}(z-i)$, entonces $f$ es analítica en $D$ y por la regla de la cadena su derivada es: \begin{align*} \frac{d}{dz} f(z) = g'(h(z)) h'(z) & = \left(e^{\frac{1}{4} \operatorname{Log}(z-i)}\right) \frac{1}{4}\left(\frac{1}{z-i}\right)\\ & = \frac{1}{4(z-i)}\left(e^{\frac{1}{4} \operatorname{Log}(z-i)}\right)\\ & = \frac{1}{4(z-i)}\left(\left(z-i\right)^{1/4}\right)\\ & = \frac{1}{4}\left(z-i\right)^{-\frac{3}{4}} \quad \forall z\in D. \end{align*}
En el resultado anterior hemos considerando la rama principal del logaritmo para poder escribir a $f$ como $f(z) = \left(z-i\right)^{1/4}$, es decir estamos trabajando con la rama principal de la función multivaluada $F(z) = \sqrt[4]{z-i}$.
Considerando este hecho, podemos utilizar la regla de la cadena y el resultado dado en la proposición 21.8 para obtener la derivada de $f$ de manera directa, es decir: \begin{equation*} \frac{d}{dz} f(z) = \frac{1}{4}\left(z-i\right)^{\frac{1}{4} – 1} = \frac{1}{4}\left(z-i\right)^{-\frac{3}{4}}, \quad \forall z\in D. \end{equation*}
Tarea moral
Completa las pruebas de las proposiciones de esta entrada.
Determina todas las soluciones para las siguientes ecuaciones. a) $e^z = 4i$. b) $e^{z-1} = -ie^3$. c) $e^{2z} + e^z + 1 = 0$. d) $e^z = 2-2i$
Determina todos los valores de las siguientes potencias complejas. a) $\left(-1\right)^{3i}$. b) $\left(-1+i\sqrt{3}\right)^{3/2}$. c) $\left(1+i\right)^{1-i}$. d) $\left(-1\right)^{\pi}$.
Para cada una de las siguientes funciones determina su dominio de analicidad y encuentra su derivada. a) $f(z) = \dfrac{\operatorname{Log}(3z-1)}{z^2+1}$. b) $f(z) = \operatorname{Log}(z^3+1)$. c) $f(z) = \operatorname{Log}_{I}(z+1)$, con $I=\left(\frac{\pi}{2}, \frac{5\pi}{2}\right)$. d) $f(z) = 3z^2 – e^{i2z} + i\operatorname{Log}(z)$.
Considera la función multivaluada $F(z) = z + \sqrt[3]{\left(z-1\right)^2}$. A partir del corte de rama, figura 82, dado por: \begin{equation*} CR = \left\{ z=x+iy \in\mathbb{C} : x=1,\,\, -\infty< y\leq 0\right\}, \end{equation*} determina la rama $f$ tal que $f(0) = 1$ y calcula $f(1+i)$ y $f(-i)$. ¿Dónde es analítica $f$? Obtén su derivada. Hint: Observa que si $z\in\mathbb{C}\setminus CR$, entonces $z – 1 = |z-1| e^{i\theta}$, con $|z-1|>0$ y $-\frac{\pi}{2} < \theta < \frac{3\pi}{2}$. En particular, para $z_0 = 0$ se cumple que $\theta_0 = \pi$.
Figura 82: Corte de rama $CR$ ejercicio 5.
Sean $D\subset \mathbb{C} \setminus\{0\}$ un dominio y $n\in\mathbb{Z}$. Supón que $f:D\to\mathbb{C}$ es una rama del logaritmo en $D$. Prueba que: \begin{equation*} z^n = e^{nf(z)}, \quad \forall z\in D. \end{equation*}
Considera a la función multivaluada $F(z) = \operatorname{log}(iz-1)$. Determina sus puntos de ramificación. Después, considera a la rama principal $f(z)=\operatorname{Log}(iz-1)$. ¿Cuál es el corte de rama de $f$? ¿Cuál es el dominio de analicidad de $f$? Obtén su derivada.
Muestra que las tres ramas de la función $z^{1/3}$ son: \begin{equation*} b_1(z) = e^{\frac{1}{3} \operatorname{Log}(z)}, \quad b_2(z) = e^{i\frac{2\pi}{3}}e^{\frac{1}{3} \operatorname{Log}(z)}, \quad b_3(z) = e^{i\frac{4\pi}{3}} e^{\frac{1}{3} \operatorname{Log}(z)}. \end{equation*} ¿Cuál es el dominio de analicidad de cada rama? Determina la derivada de cada rama.
Considera la función multivaluada $F(z) = \sqrt[4]{z}$. Utilizando la rama natural del logaritmo, determina la rama $f$ tal que $f(-1) = \frac{\sqrt{2}}{2}\left(1+i\right)$. ¿Cuál es el dominio de analicidad de $f$?. Determina el valor de $f'(-i)$. Hint: Recuerda que la rama natural del logaritmo es: \begin{equation*} \operatorname{Log}_{(0, 2\pi)}(z) = \operatorname{ln}|z| + i\operatorname{Arg}_{(0,2\pi)}(z), \end{equation*} la cual es analítica en el dominio $D = \mathbb{C}\setminus[0, \infty)$.
Muestra que las funciones $f_1(z) = \operatorname{Log}(1-z)$ y $f_2(z) = \operatorname{Log}(1+z)$ son analíticas, respectivamente, en los dominios: \begin{equation*} D_1 = \mathbb{C} \setminus A_1 \quad \text{y} \quad D_2 = \mathbb{C} \setminus A_2, \end{equation*} donde: \begin{align*} A_1 = \{z\in\mathbb{C} : \operatorname{Re}(z)\geq 1, \operatorname{Im}(z)=0\},\\ A_2 = \{z\in\mathbb{C} : \operatorname{Re}(z)\leq -1, \operatorname{Im}(z)=0\}. \end{align*}
Más adelante…
En esta entrada hemos dado una definición para las funciones logaritmo y exponecial complejas. A diferencia de sus versiones reales, vimos que estas funciones son, en general, multivaluadas, por lo que debemos elegir alguna rama para poder estudiar las propiedades de cada una de estas funciones, como la continuidad y analicidad. Por simplicidad es común trabajar con las ramas principales, sin embargo en ciertas ocasiones cambiar de ramas nos permitirá resolver algún problema de manera más sencilla.
De acuerdo con los resultados de esta entrada, vimos que la rama principal del logaritmo extiende al logaritmo natural real y que nos permite obtener logaritmos para número reales negativos. Además de que bajo ciertas restricciones esta rama es una de las inversas de la función exponencial compleja.
Para el caso de las potencias complejas, vimos que, en general, no se cumplen las propiedades de las potencias reales con las que estamos familiarizados. Sin embargo, trabajar con potencias complejas nos facilita el trabajo a la hora de determinar ramas específicas de una función multivaluada.
La siguiente entrada definiremos otras funciones elementales, las funciones trigonométricas e hiperbólicas y estudiaremos algunas de sus propiedades más elementales. Veremos que a través de la exponencial y el logaritmo podremos definir a estas funciones y sus inversas.
En esta entrada abordaremos otro de los problemas conocidos que se pueden plantear en términos de programación lineal: el problema del transporte. A grandes rasgos, el problema del transporte habla de cómo surtir a diferentes destinos de un cierto producto que parte de diferentes orígenes con disponibilidad limitada.
Siendo un poco más concretos, cada origen tiene una cierta cantidad de unidades de producto. Cada destino requiere de una cierta cantidad de unidades de producto. Además, para cada pareja origen-destino se tiene un costo de transporte unitario. El objetivo es determinar cuál es la manera más económica de cumplir con todos los requisitos de oferta y demanda.
Ejemplo del problema del transporte
Supongamos que una compañía que produce electrónicos tiene tres almacenes $A$, $B$ y $C$. La cantidad de computadoras portátiles disponibles en cada uno de los almacenes se encuentra registrada en la siguiente tabla.
Origen
A
B
C
Oferta en unidades
200
350
470
Pensemos que hay dos tiendas de electrónicos $X$ y $Y$ que desean vender computadoras portátiles de dicha compañía. La cantidad de computadoras portátiles que necesita cada tienda está dada en la siguiente tabla.
Destino
X
Y
Demanda en unidades
300
500
Además de esto sabemos que transportar cada una de las computadoras portátiles tiene un costo que depende del almacén origen y de la tienda destino. El costo unitario de transporte está dado por la siguiente tabla.
A (200)
B (350)
C (470)
X (300)
35
40
42
Y (500)
44
37
45
Así, por ejemplo, transportar una computadora portátil del almacén $B$ a la tienda $Y$ tiene un costo de \$37 por unidad.
Queremos determinar cuántas computadoras portátiles se tienen que enviar de cada origen a cada destino de manera que no se exceda la cantidad disponible en cada origen, a cada tienda llegue la cantidad de computadoras que se deben enviar y se minimice el costo total de envío.
Variables de decisión
Lo que tenemos que decidir en nuestro problema es cuántas computadoras portátiles se envían de cada origen a cada destino. Por ejemplo, debemos decidir cuánto vale una variable $x_{ij}$ que nos dice cuántas computadoras portátiles enviar del almacén $i$ a la tienda $j$. Así, las variables se definen de la siguiente manera:
$x_{ij}$ = número de computadoras a transportar del almacén $i$ al destino $j$. $i \in \{A, B, C\}, j \in \{X, Y\}$.
En este ejemplo en concreto, la cantidad de unidades debe ser un número entero (no podemos enviar $1/2$ de computadora portátil de un almacén a una tienda).
Función objetivo
Debemos de establecer cuál es la función objetivo que queremos optimizar. Notemos que el costo total que involucrarán las computadoras portátiles enviadas del almacén $A$ a la tienda $X$ es $35x_{AX}$, pues de acuerdo a la tabla de costos de transporte, hay un costo de \$35 para enviar cada computadora portátil. Todas las computadoras que salgan del almacén $A$ tendrán entonces un costo de $35x_{AX}+44x_{AY}$. Si calculamos de manera similar el costo de las computadoras que se salen de los almacenes $B$ y $C$ obtenemos el total. Entonces la función objetivo será la siguiente expresión:
$$Min \quad z = 35x_{AX}+44x_{AY}+40x_{BX}+37x_{BY}+42x_{CX}+45x_{CY}.$$
Restricciones
Hay dos tipos de restricciones que debemos cuidar:
Que ninguno de los almacenes exceda la cantidad de computadoras portátiles que tiene disponible.
Que cada tienda reciba el número de computadoras portátiles que requiere.
En el caso de la primera restricción, lo que estamos haciendo es limitar a las sumas que involucren a un mismo almacén. Por ejemplo, para no exceder las $200$ unidades que se tienen disponibles en el almacén $A$, se debe cumplir que $x_{AX}+x_{AY}\leq 200$. De manera similar, con el almacén $B$ obtenemos que $x_{BX}+x_{BY}\leq 350$ y con el almacén $C$ obtenemos que $x_{CX}+x_{CY}\leq 470$.
En el caso de la segunda restricción, ahora la desigualdad es opuesta: es una condición que requiere que las computadoras portátiles que lleguen a cada tienda sean al menos un valor dado. Entonces, para la tienda $X$ se tiene que cumplir $x_{AX}+x_{BX}+x_{CX}\geq 300$ y para la tienda $Y$ se tiene que cumplir $x_{AY}+x_{BY}+x_{CY}\geq 500$.
Entonces, juntando todas las restricciones, tenemos:
Resumen de formulación del problema del transporte
En resumen, el ejemplo de problema de transporte queda resumido en el siguiente PPL.
\begin{align*} Min \quad z = 35x_{AX}+44x_{AY}+40x_{BX}&+37x_{BY}+42x_{CX}+45x_{CY}&\\ s.a.&\\ x_{AX}+x_{AY}&\leq 200\\ x_{BX}+x_{BY}&\leq 350\\ x_{CX}+x_{CY}&\leq 470\\ x_{AX}+x_{BX}+x_{CX}&\geq 300\\ x_{AY}+x_{BY}+x_{CY}&\geq 500\\ x_{ij} \in \mathbb{Z}, i \in \{A, B, C\}, j \in \{X, Y\}\\ \end{align*}
Formulación general del problema del transporte
De manera general, en el problema del transporte se requieren transportar ciertas unidades de un producto desde $m$ centros de oferta (también llamados orígenes), a $n$ centros de demanda, (también denominados destinos). Cada centro de oferta tiene una cierta cantidad de unidades disponibles, y cada centro de demanda tiene una cierta cantidad de unidades que desea recibir.
Llamemos $o_i$ a la oferta del origen $i$ en unidades del producto ($i=1, \ldots , m$) y $d_j$ la demanda del destino $j$ en unidades del producto ($j=1, \ldots, n$). Para cada origen $i$ y cada destino $j$ tiene cierto costo enviar una unidad de producto. Sea $c_{ij}$ el costo unitario de transporte del producto del origen $i$ al destino $j$ ($i = 1, \ldots , m;j=1, \ldots , n$).
Lo que buscamos es determinar para cada origen $i$ y cada destino $j$ cuántas unidades $x_{ij}$ se deben transportar de tal modo que no se exceda la producción de cada origen, se satisfaga la demanda en cada destino y se incurra en el mínimo costo de transporte.
Origen 1
Origen 2
$\ldots$
Origen m
Demanda
Destino 1
$c_{11}$
$c_{21}$
$\ldots$
$c_{m1}$
$d_1$
Destino 2
$c_{12}$
$c_{22}$
$\ldots$
$c_{m2}$
$d_2$
$\vdots$
$\vdots$
$\vdots$
$\ddots$
$\vdots$
$\vdots$
Destino n
$c_{1n}$
$c_{2n}$
$\ldots$
$c_{mn}$
$d_n$
Oferta
$o_1$
$o_2$
$\ldots$
$o_m$
Como lo hemos hecho en entradas anteriores, las condiciones anteriores pueden ser planteadas en términos lineales. Para no exceder la oferta del origen $i$, se debe cumplir que
$$\sum_{j=1}^nx_{ij} \leq o_i,$$
para cada $i=1,\ldots,m$. A estas desigualdades les llamamos las restricciones de oferta.
Para cumplir con la demanda en el destino $j$ se debe cumplir que
$$\sum_{i=1}^{m}x_{ij} \geq d_j,$$
para cada $j=1,\ldots,n$. A estas desigualdades les llamamos las restricciones de demanda.
Agregando las condiciones de positividad y estableciendo que queremos minimizar el costo total, obtenemos el problema planteado de la siguiente manera:
\begin{align*} Min \quad z &= \sum_{i=1}^{m} \sum_{j=1}^{n} c_{ij}x_{ij}\\ s.a.&\\ \sum_{j=1}^nx_{ij} &\leq o_i, \quad i=1, \ldots , m \quad \quad (1)\\ \sum_{i=1}^{m}x_{ij} &\geq d_j, \quad j=1, \ldots , n \quad \quad (2)\\ x_{ij} &\geq 0; \quad i=1, \ldots , m; j=1, \ldots , n,\\ \end{align*}
donde $x_{ij}$ es el número de unidades del producto a transportar del origen $i$ al destino $j$, para cada $i=1, \ldots , m$ y cada $j = 1, \ldots , n$.
Las desigualdades en (1) se llaman restricciones de oferta y en (2) restricciones de demanda.
Más adelante…
Con este problema contamos ya con tres ejemplos de situaciones que se pueden plantear en términos de programación lineal: el problema de la dieta, el problema de la mochila y el problema del transporte. A continuación veremos dos más: el problema de producción e inventario, y el problema de la ruta más corta.
Tarea
Encuentra por lo menos una manera de realizar las asignaciones de variables en el problema de los almacenes de computadoras portátiles y las tiendas. No importa que el costo total que encuentres no sea óptimo, pero sí se deben cumplir las restricciones de oferta y de demanda.
¿Qué sucede en el problema del transporte si la cantidad total de demanda excede a la cantidad total de oferta? Plantea esta posibilidad en términos de los parámetros $o_i$ y $d_j$ de oferta y demanda, respectivamente.
Imagina que en el ejemplo que planteamos de computadoras portátiles, almacenes y tiendas sucede que el precio de transportar una computadora portátil es de \$30 sin importar el almacén origen o la tienda destino. En este caso, ¿cuál sería una manera óptima de realizar los envíos, y tal que se cumplan las restricciones de oferta y demanda?
Se presenta la siguiente situación:
Una empresa coreana fabrica y luego distribuye sus pantallas a diferentes vendedores. En este momentos tienen pantallas de 4 diferentes tamaños: 43″, 50″, 55″ y 65″. Los países a donde distribuyen sus productos son Japón, China y Estados Unidos. En la siguiente tabla se muestra el costo de exportación en miles de dólares por cada 1000 televisores de cada modelo.
43″
50″
55″
65″
Demanda este año
Japón
\$50k
\$60k
\$65k
\$70k
100k
China
\$60k
\$70k
\$75k
\$80k
300k
Estados Unidos
\$80k
\$90k
\$95k
\$100k
350k
Disponibilidad
250k
220k
180k
150k
——
También se señaló en la tabla anterior cual es la demanda de cada país para este año y las pantallas que fueron fabricadas este año por cada modelo.
Plantea este problema como un problema del transporte como se hizo anteriormente.
Un posible caso particular del problema del transporte sucede cuando hay muchos orígenes y únicamente un destino. Plantea esta posibilidad de manera general. En este caso, ¿cuál sería una buena estrategia para decidir cuáles orígenes deben enviar unidades del producto al destino?
Respuestas
1.- (Respuesta a criterio del lector)
2.- Si la demanda supera a la oferta, por lo menos uno de los destinos del problema va a cumplir que $\sum_{i=1}^{m}x_{ij} < d_j$, por lo que no cumplirá una de las restricciones de nuestro problema y no habrá solución factible.
3.- En este caso, sería indistinto de donde elijamos enviar nuestras computadoras con tal de que se satisfaga la demanda, y solamente se parará de enviar computadoras cuando se satisfaga esta demanda de 800 computadoras, que en cualquier caso nos dará un costo total de envío de $24000.
4.- Nuestra variable de decisión va a ser la siguiente: $x_{ij}$ = miles de televisores del tamaño $i$ que van a ser exportados al país $j$, $i \in \{1 (\textrm{43″}), 2 (\textrm{50″}), 3 (\textrm{55″}), 4 (\textrm{65″})\}$, $j \in \{1 (\textrm{Japón}), 2 (\textrm{China}), 3 (\textrm{Estados Unidos})\}$
Si seguimos los pasos como lo hemos venido haciendo, el problema debería quedar planteado de la siguiente manera:
5.- Como solamente habría un destino, la variable de decisión sería la siguiente: $x_i$ = unidades de producto que vamos a enviar del origen $i$ a nuestro destino, $i \in \{1, \ldots, m\}$
Sea $d$ la demanda de nuestro único destino.
El planteamiento general sería el siguiente:
\begin{align*} Min \quad z &= \sum_{i=1}^{m} c_{i}x_{i}\\ s.a.&\\ x_i &\leq o_i, \quad i \in \{1, \ldots , m\}\\ \sum_{i=1}^{m}x_i &\geq d\\ x_i &\geq 0 \quad i \in \{1, \ldots , m\}\\ \end{align*}
Una buena estrategia para resolver el problema simplemente sería ir agotando las unidades que nos puede proporcionar cada origen empezando por los que nos dan el menor costo de transporte por unidad, y parar justo cuando se haya cumplido la demanda de este único destino.
Veamos un último ejemplo de los problemas que podremos resolver con la teoría que desarrollaremos más adelante. Se conoce como el problema de la ruta más corta, y la idea es muy sencilla. Se tiene una red de localizaciones en un mapa. Hay algunos tramos que conectan localizaciones. Atravesar cada uno de ellos tiene cierto costo (asociado por ejemplo, con la distancia). Si nos dan un origen y un destino, ¿cómo podremos determinar el camino a seguir que nos lleve del origen al destino con el menor costo posible? Comencemos con un ejemplo concreto.
Ejemplo del problema de la ruta más corta
Supongamos que un empleado sale de trabajar a cierta hora de la noche y para regresar a su casa evalúa las posibles rutas a tomar en una aplicación móvil. La aplicación le indica algunas calles y avenidas que lo llevan de su trabajo (1) a su casa (7). Los vértices de en medio (2, 3, 4, 5 y 6) representan los cruces de calles por los que se transita en estas posibles rutas. También le indica cual es el tiempo que le tomará ir por cada calle o avenida en minutos, tomando en cuenta no solo la distancia, sino también el tráfico y los accidentes que se presentan. El empleado busca la ruta más rápida para poder llegar a su casa a descansar.
Una representación gráfica del problema presentado
Aunque parezca que este problema es muy geométrico, en realidad también se puede plantear en términos algebraicos, como veremos a continuación.
Variables de decisión del problema de la ruta más corta
En otros problemas hemos tenido variables de decisión que nos dicen cuánto producir, cuánto transportar, cuánto comer, etc. En esta caso, nuestras variables de decisión no representarán una cantidad, sino simplemente una decisión de «sí» o «no». Lo que haremos es establecer una variable $x_{ij}$ por cada uno de los posibles tramos del destino $i$ al $j$, y será una variable binaria que indique la decisión de recorrer o no tal tramo. Si sí lo recorremos tendrá valor $1$ y si no, tendrá valor $0$.
Por ejemplo si tomamos la ruta {1,2,3,7}, tendremos $x_{12} = x_{23} = x_{37}=1$, lo cual nos indicará que sí se recorren los tramos $(1,2)$, $(2,3)$, y $(3,7)$. Por otro lado, tomaremos $x_{ij} = 0$ para los demás tramos, que nos indicará que no se recorren.
Explícitamente, en nuestro ejemplo tomaremos variables $x_{ij}$ con $i<j$, y tales que $(i,j)$ esté en el conjunto $A$ de todas las parejas $i<j$ para las cuales haya un tramo entre $i$ y $j$ (en cualquier dirección). La interpretación que les daremos será la siguiente:
$$x_{ij}=\begin{cases} 1 \quad \text{si se recorre el tramo $(i,j)$} \\ 0 \quad \text{si no}. \end{cases}$$
Restricciones del problema de la ruta más corta
Ya establecidas las variables de decisión, lo que debemos hacer ahora es dar restricciones que hagan que los tramos elegidos definan una ruta.
Pensemos en qué sucede desde el trabajo. De ahí es donde debemos empezar. Solamente debemos tomar un tramo desde el trabajo, pues si pasamos por el trabajo más de una vez, en realidad nos podemos ahorrar esa vuelta que dimos de más para llegar más rápido a casa . Esto significa o que $x_{12} = 1$, o que $x_{14}=1$, y sólo una de estas dos igualdades se cumple. Ya que las variables sólo serán $0$ ó $1$, otra manera de escribir esto mismo es pedir que $$x_{12}+x_{14}=1.$$
Del mismo modo, debemos garantizar que se llegue a casa por un solo tramo, que se puede escribir como $$x_{37}+x_{57}+x_{67}=1,$$ o bien $$-x_{37}-x_{57}-x_{67}=-1.$$
Para el resto de las zonas, debemos tomar en cuenta que si se entra a una, también se debe salir. Y si no se entra tampoco se sale. Veamos qué pasa, por ejemplo, con el cruce 2:
Si se entra entonces $x_{12}=1$. Deberá cumplirse entonces que $x_{23} = 1$ o $x_{26} = 1$ y sólo una de éstas.
Si no se entra entonces $x_{12}=0$. Deberá cumplirse entonces: $x_{23}=x_{26} = 0$.
Podemos reescribir ambos casos anteriores de manera simplificada con la igualdad $$x_{12} = x_{23}+x_{26},$$ que también se puede escribir como $$x_{23}+x_{26}-x_{12}=0.$$
Cada uno de los cruces $3,4,5,6$ nos dan restricciones similares.
Función objetivo del problema de la ruta más corta
Finalmente, debemos determinar cuánto nos costará recorrer una ruta una vez fijas las variables de decisión. Esto es sencillo. Si el tramo de $i$ a $j$ tiene un costo de $c_{ij}$, entonces recorrerlo nos costará $x_{ij}c_{ij}$. En nuestro problema, la función objetivo quedaría como sigue:
Resumen de formulación del problema de la ruta más corta
Así, el problema de ruta más corta que vimos como ejemplo queda descrito como sigue. \begin{align*} z&=30x_{12}+20x_{14}+20x_{23}+8x_{26}\\ &+10x_{36}+50x_{37}+20x_{45}+10x_{56}\\ &+50x_{57}+30x_{67}. \end{align*} \begin{align*} s.a.\\ x_{12}+x_{14} &= 1\\ -x_{12}+x_{23}+x_{26} &= 0\\ -x_{14}+x_{45} &= 0\\ -x_{23}+x_{36}+x_{37} &= 0\\ -x_{45}+x_{56}+x_{57} &= 0\\ -x_{26}-x_{36}-x_{56}+x_{67} &= 0\\ -x_{37}-x_{57}-x_{67} &= -1\\ x_{ij}=0,1 \quad \forall (i,j) &\in A.\\ \end{align*}
Este problema podría plantearse en general, bajo algunas condiciones sobre el tipo de mapas en los que se puede resolver. Este es un modelo lineal entero binario que tiene la propiedad de que puede ser resuelto eficientemente con algoritmos de programación lineal
Otro ejemplo de ruta más corta
La idea anterior puede servir no sólo para resolver problemas en donde nos interesen las distancias geográficas. En otros problemas, nos interesa llegar «rápidamente» a una meta que tenemos, pero quizás con una noción un poco distinta de «rapidez». Esto puede querer decir llegar a un objetivo de negocio en pocos días. Hay casos en los que también podremos plantear esta situación como un problema de ruta más corta. Considera el siguiente ejemplo.
Una compañía que renta automóviles está desarrollando una política de reemplazo para su flotilla de automóviles en un horizonte de planeación de 4 años. Al inicio de cada año, un automóvil se reemplaza o se conserva en operación durante un año más. Un automóvil debe estar en servicio de 1 a 3 años. La siguiente tabla proporciona el costo de reemplazo como una función del año en que se adquiere un automóvil y los años en operación.
Equipo adquirido al inicio del año
Costo de reemplazo ($) para años dados en operación
1
2
3
1
4000
5400
9800
2
4300
6200
8700
3
4800
7100
______
4
4900
______
______
El problema puede formularse como una red en la que los nodos 1 a 5 representan el inicio de los años 1 a 5. Los arcos a partir del nodo 1 (año 1) pueden llegar a los nodos 2, 3 y 4 porque un automóvil puede estar en operación de 1 a 3 años. Los arcos a partir de los demás nodos pueden interpretarse del mismo modo. La longitud de cada arco es igual al costo de reemplazo. La solución del problema es equivalente a determinar la ruta más corta entre los nodos 1 y 5.
El problema puede ser representado con la siguiente red:
Más adelante…
Con esto terminamos los últimos planteamientos de problemas ejemplo de programación lineal. Por un lado, estos nos servirán como motivación para saber el tipo de problemas que podemos resolver. Por otro lado, nos irán guíando para el desarrollo de distintas técnicas de solución.
Ya que conocemos el tipo de problemas que podremos resolver, platicaremos ahora un poco de la teoría general que respaldará nuestros métodos. En la siguiente entrada introduciremos algunos aspectos teóricos de los problemas de programación lineal.
Tarea moral
Intenta resolver el ejemplo de la ruta más corta que pusimos como ejemplo usando técnicas elementales y una división en casos. ¿Cuál sería la ruta más corta? ¿Por qué crees que sea importante tener métodos generales si este ejemplo se puede resolver de manera muy sencilla con unos pocos casos?
Formula el segundo ejemplo del problema de la ruta más corta como un problema de programación lineal. ¿Qué interpretación tendría encontrar la ruta más corta?
Pedro va en auto diariamente a la facultad. Pedro siempre toma la misma ruta para llegar a la facultad. Por desgracia, en ocasiones hay algunos asaltos sobre la ruta, y a Pedro le gustaría disminuir lo más posible la probabilidad de que esto suceda. Pedro ha decidido por lo tanto elegir una ruta que minimice la probabilidad de ser asaltado. La red presentada a continuación muestra las posibles rutas de su casa a la facultad y la probabilidad asociada de no ser asaltado en cada segmento.
La probabilidad de no ser asaltado en la ruta es el producto de las probabilidades de sus segmentos. Por ejemplo, la probabilidad de no ser asaltado en la ruta $1 \rightarrow 3 \rightarrow 5\rightarrow 7$ es $.9 \times .3 \times .25 = .0675$. El objetivo de Pedro es seleccionar la ruta que minimice la probabilidad de ser asaltado. ¿Puedes pensar en una manera de formular este problema como un modelo de la ruta más corta? Como sugerencia, trata de usar la función logaritmo.
Una vez planteado el problema anterior, intenta resolverlo con herramientas básicas y algunos casos.
Intenta plantear por tu cuenta una versión general del segundo problema que vimos en esta entrada. ¿Qué sucedería si tenemos más periodos en los que se puede renovar la flotilla? ¿Cómo se vería el problema?