Introducción
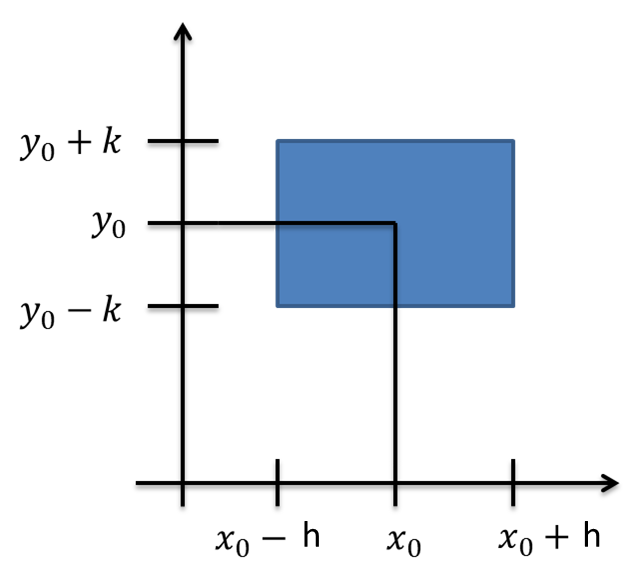
Para el caso del Teorema de la función implícita en su versión general, analizaremos primero el caso de dos dimensiones cuando solemos tener una función $F : \mathbb{R}^2 \rightarrow \mathbb{R}$, geométricamente $F(x,y)=0$ nos representa una curva en el plano. El teorema TFI afirma que si en un punto de la curva su tangente no es vertical entonces localmente se puede tener el gráfico de una función.
Teorema de la Función Implícita ($f:\mathbb{R}\rightarrow\mathbb{R}$
Teorema. Considere la función $y=f(x)$. Sea $(x_{0},y_{0}) \in \mathbb{R}^{2}$ un punto tal que $F(x_{0},y_{0})=0$. Suponga que la función $F$ tiene derivadas parciales continuas en alguna bola con centro $(x_{0},y_{0})$ y que $\displaystyle \frac{\partial F}{\partial y}(x_{0},y_{0})\neq 0$. Entonces $F(x,y)=0$ se puede resolver para $y$ en términos de $x$ y definir así una función $y=f(x)$ con dominio en una vecindad de $(x_{0},y_{0})$, tal que $y_{0}=f(x_{0})$, lo cual tiene derivadas continuas en $\mathcal{V}$ que pueden calcularse como $y’=f'(x)= – \displaystyle \frac{\displaystyle \frac{\partial F}{\partial x}(x,y)}{\displaystyle \frac{\partial F}{\partial y}(x,y)}$, $x \in \mathcal{V}$.
Ejercicio. Si $$y’=f'(x)=-\displaystyle \frac{\displaystyle \frac{\partial F}{\partial
x}(x,y)}{\displaystyle \frac{\partial F}{\partial y}(x,y)}$$ calcular $y^{»}$
Solución. En este caso
$$y^{»}=-\frac{\left(\frac{\partial F}{\partial y}\right)\left[\frac{\partial^{2} F}{\partial x^{2}}\frac{dx}{dx}+\frac{\partial^{2} F}{\partial y\partial x}\frac{dy}{dx}\right]-\left(\frac{\partial F}{\partial x}\right)\left[\frac{\partial^{2} F}{\partial x\partial y}\frac{dx}{dx}+\frac{\partial^{2} F}{\partial y^{2}}\frac{dy}{dx}\right]}{\left(\frac{\partial F}{\partial y}\right)^{2}}$$
$$=-\frac{\left(\frac{\partial F}{\partial y}\right)\left[\frac{\partial^{2} F}{\partial x^{2}}+\frac{\partial^{2} F}{\partial y\partial x}\left(-\frac{\frac{\partial F}{\partial x}}{\frac{\partial F}{\partial y}}\right)\right]-\left(\frac{\partial F}{\partial x}\right)\left[\frac{\partial^{2} F}{\partial x\partial y}\frac{dx}{dx}+\frac{\partial^{2} F}{\partial y^{2}}\left(-\frac{\frac{\partial F}{\partial x}}{\frac{\partial F}{\partial y}}\right)\right]}{\left(\frac{\partial F}{\partial y}\right)^{2}}$$
$$=-\frac{\left(\frac{\partial F}{\partial y}\right)^{2}\left(\frac{\partial^{2} F}{\partial x^{2}}\right)-\left(\frac{\partial^{2} F}{\partial y\partial x}\right)\left(\frac{\partial F}{\partial x}\right)\left(\frac{\partial F}{\partial y}\right)-\left(\frac{\partial F}{\partial x}\right)\left(\frac{\partial F}{\partial y}\right)\left(\frac{\partial^{2} F}{\partial x\partial y}\right)+\left(\frac{\partial F}{\partial x}\right)^{2}\left(\frac{\partial^{2} F}{\partial y^{2}}\right)}{\left(\frac{\partial F}{\partial y}\right)^{3}}$$
$$=-\frac{\left(\frac{\partial F}{\partial y}\right)^{2}\left(\frac{\partial^{2} F}{\partial x^{2}}\right)-2\left(\frac{\partial^{2} F}{\partial y\partial x}\right)\left(\frac{\partial F}{\partial x}\right)\left(\frac{\partial F}{\partial y}\right)+\left(\frac{\partial F}{\partial x}\right)^{2}\left(\frac{\partial^{2} F}{\partial y^{2}}\right)}{\left(\frac{\partial F}{\partial y}\right)^{3}}$$
Teorema de la Función Implícita ($f:\mathbb{R}^{2}\rightarrow\mathbb{R}$)
Teorema. Considere la función $F(x,y,z)$. Sea $(x_{0},y_{0},z_{0}) \in
\mathbb{R}^{3}$ un punto tal que $F(x_{0},y_{0},z_{0})=0$. Suponga que la
función F tiene derivadas parciales $\displaystyle{\frac{\partial F}{\partial x},~\frac{\partial F}{\partial y},~\frac{\partial F}{\partial z}}$ continuas en alguna bola con
centro $(x_{0},y_{0},z_{0})$ y que $\displaystyle \frac{\partial
F}{\partial z}(x_{0},y_{0},z_{0})\neq 0$.
Entonces $F(x,y,z)=0$ se puede resolver para $z$ en términos de $x,y$
y definir así una función $z=f(x,y)$ con dominio en una vecindad de
$(x_{0},y_{0},z_{0})$, tal que $z_{0}=f(x_{0},y_{0})$, lo cual tiene derivadas continuas
en $\mathcal{V}$ que pueden calcularse como $$\frac{d z}{dx}(x,y)=-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
x}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}~~~~~~~\frac{d z}{dy}(x,y)=-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}$$
Ejercicio. Si
$$\frac{d z}{dx}(x,y)=-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
x}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}$$ calcular $$\frac{\partial^{2}F}{\partial x^{2}}$$
Solución. Tenemos que
$$\frac{\partial^{2}F}{\partial x^{2}}=\frac{\partial}{\partial x}\left(-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
x}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}\right)=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial x^{2}} \frac{dx}{d x}+ \frac{\partial^{2} F}{\partial y\partial x} \frac{dy}{dx}+ \frac{\partial^{2} F}{\partial z\partial x} \frac{dz}{dx}\right]-\left( \frac{\partial F}{\partial x}\right)\left[ \frac{\partial^{2} F}{\partial x \partial z}\frac{dx}{d x}+ \frac{\partial^{2} F}{\partial y\partial z} \frac{dy}{dx}+ \frac{\partial^{2} F}{\partial z^{2}} \frac{dz}{dx}\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial x^{2}}+ \frac{\partial^{2} F}{\partial z\partial x} \frac{dz}{dx}\right]-\left( \frac{\partial F}{\partial x}\right)\left[ \frac{\partial^{2} F}{\partial x \partial z}+\frac{\partial^{2} F}{\partial z^{2}} \frac{dz}{dx}\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial x^{2}}+ \frac{\partial^{2} F}{\partial z\partial x} \left(-\frac{\frac{\partial F}{\partial x}}{\frac{\partial F}{\partial z}}\right)\right]-\left( \frac{\partial F}{\partial x}\right)\left[ \frac{\partial^{2} F}{\partial x \partial z}+\frac{\partial^{2} F}{\partial z^{2}}\left(-\frac{\frac{\partial F}{\partial x}}{\frac{\partial F}{\partial z}}\right)\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)^{2} \frac{\partial^{2} F}{\partial x^{2}}-2 \frac{\partial^{2} F}{\partial z\partial x} \frac{\partial F}{\partial x}\frac{\partial F}{\partial z}+\left(\frac{\partial F}{\partial x}\right)^{2}{\frac{\partial^{2} F}{\partial z^{2}}}}{\left(\frac{\partial F}{\partial z}\right)^{3}}$$
Ejercicio. Si
$$\frac{d z}{dy}(x,y)=-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}$$ calcular $$\frac{\partial^{2}F}{\partial y^{2}}$$
Solución. tenemos que
$$\frac{\partial^{2}F}{\partial y^{2}}=\frac{\partial}{\partial y}\left(-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}(x,y)}{\displaystyle \frac{\partial F}{\partial z}(x,y)}\right)=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial y\partial x} \frac{dx}{d y}+ \frac{\partial^{2} F}{\partial y^{2}} \frac{dy}{dy}+ \frac{\partial^{2} F}{\partial z\partial y} \frac{dz}{dy}\right]-\left( \frac{\partial F}{\partial y}\right)\left[ \frac{\partial^{2} F}{\partial x \partial z}\frac{dx}{d y}+ \frac{\partial^{2} F}{\partial y\partial z} \frac{dy}{dy}+ \frac{\partial^{2} F}{\partial z^{2}} \frac{dz}{dy}\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial y^{2}}+ \frac{\partial^{2} F}{\partial z\partial y} \frac{dz}{dy}\right]-\left( \frac{\partial F}{\partial y}\right)\left[ \frac{\partial^{2} F}{\partial y \partial z}+\frac{\partial^{2} F}{\partial z^{2}} \frac{dz}{dy}\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial y^{2}}+ \frac{\partial^{2} F}{\partial z\partial y} \left(-\frac{\frac{\partial F}{\partial y}}{\frac{\partial F}{\partial z}}\right)\right]-\left( \frac{\partial F}{\partial y}\right)\left[ \frac{\partial^{2} F}{\partial y \partial z}+\frac{\partial^{2} F}{\partial z^{2}}\left(-\frac{\frac{\partial F}{\partial y}}{\frac{\partial F}{\partial z}}\right)\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)^{2} \frac{\partial^{2} F}{\partial y^{2}}-2 \frac{\partial^{2} F}{\partial z\partial y} \frac{\partial F}{\partial y}\frac{\partial F}{\partial z}+\left(\frac{\partial F}{\partial y}\right)^{2}{\frac{\partial^{2} F}{\partial z^{2}}}}{\left(\frac{\partial F}{\partial z}\right)^{3}}$$
Ejercicio. Si
$$\frac{d z}{dy}(x,y)=-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}}{\displaystyle \frac{\partial F}{\partial z}}$$ calcular $$\frac{\partial^{2}F}{\partial y\partial x}$$
Solución. tenemos que
$$\frac{\partial^{2}F}{\partial y\partial x}=\frac{\partial}{\partial y}\left(\frac{\partial F}{\partial x}\right)=\frac{\partial}{\partial y}\left(-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
x}}{\displaystyle \frac{\partial F}{\partial z}}\right)=$$
$$-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial y\partial x} + \frac{\partial^{2} F}{\partial z\partial x} \frac{\partial z}{\partial y}\right]-\left(\frac{\partial F}{\partial x}\right)\left[ \frac{\partial^{2} F}{\partial y\partial z} +\frac{\partial^{2} F}{\partial z^{2}}\frac{\partial z}{\partial y}\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$-\frac{\left( \frac{\partial F}{\partial z}\right)\left[ \frac{\partial^{2} F}{\partial y\partial x} + \frac{\partial^{2} F}{\partial z\partial x} \left(-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}}{\displaystyle \frac{\partial F}{\partial z}}\right)\right]-\left(\frac{\partial F}{\partial x}\right)\left[ \frac{\partial^{2} F}{\partial y\partial z} +\frac{\partial^{2} F}{\partial z^{2}}\left(-\displaystyle
\frac{\displaystyle \frac{\partial F}{\partial
y}}{\displaystyle \frac{\partial F}{\partial z}}\right)\right]}{\left(\frac{\partial F}{\partial z}\right)^{2}}$$
$$=-\frac{\left( \frac{\partial F}{\partial z}\right)^{2} \frac{\partial^{2} F}{\partial y\partial x}- \frac{\partial^{2} F}{\partial z\partial x} \frac{\partial F}{\partial y}\frac{\partial F}{\partial z}-\frac{\partial^{2} F}{\partial y\partial z} \frac{\partial F}{\partial x}\frac{\partial F}{\partial z}+\frac{\partial^{2} F}{\partial z^{2}}\frac{\partial F}{\partial x}\frac{\partial F}{\partial y}}{\left(\frac{\partial F}{\partial z}\right)^{3}}$$
Teorema de la Función Implicita (version sistemas de ecuaciones)
Consideremos ahora el sistema
$au+bv-k_{1}x=0$
$cu+dv-k_{2}y=0$
con $a,b,c,d,k_{1},k_{2}$ constantes. Nos preguntamos cuando
podemos resolver el sistema para $u$ y $v$ en términos de $x$ y $y$.
Si escribimos el sistema como
$au+bv=k_{1}x$
$cu+dv=k_{2}y$
y sabemos que este sistema tiene solución si $det
\left|\begin{array}{cc} a&b\\
c&d\end{array}\right|\neq0$ en tal caso escribimos
$u=\displaystyle \frac{1}{det \left|\begin{array}{cc} a&b
\\c&d\end{array}\right|}(k_{1}dx-k_{2}by)$,~~$v=\displaystyle \frac{1}{det \left|\begin{array}{cc} a&b
\\c&d\end{array}\right|}(k_{2}ay-k_{1}cx)$.
Esta solución no cambiaría si consideramos
$au+bv=f_{1}(x,y)$
$cu+dy=f_{2}(x,y)$
donde $f_{1}$ y $f_{2}$ son funciones dadas de $x$ y $y$. La posibilidad de despejar las variables $u$ y $v$ en términos de $x$ y $y$ recae sobre los coeficientes de estas variables en las ecuaciones dadas.
Ahora si consideramos ecuaciones no lineales en $u$ y $v$ escribimos el sistema como
$g_{1}(u,v)=f_{1}(x,y)$
$g_{2}(u,v)=f_{2}(x,y)$
nos preguntamos cuando del sistema podemos despejar a $u$y $v$ en términos de $x$ y $y$. Mas generalmente, consideramos el problema siguiente, dadas las funciones $F$ y $G$ de las variables $u,v,x,y$ nos preguntamos cuando de las expresiones
$F(x,y,u,v)=0$
$G(x,y,u,v)=0$
podemos despejar a $u$ y $v$ en términos de $x$ y $y$ en caso de ser posible diremos que las funciones $u=\varphi_{1}(x,y)$ y $v=\varphi_{2}(x,y)$ son funciones implícitas dadas. Se espera que $\exists’$n funciones $u=\varphi_{1}(x,y)$ y $v=\varphi_{2}(x,y)$ en
$F(x,y,\varphi_{1}(x,y),\varphi_{2}(x,y)$
$G(x,y,\varphi_{1}(x,y),\varphi_{2}(x,y)$
con $(x,y)$ en alguna vecindad $V$. Suponiendo que existen $\varphi_{1}$ y $\varphi_{2}$ veamos sus derivadas
$\displaystyle \frac{\partial F}{\partial x}\displaystyle \frac{\partial x}{\partial x}+\displaystyle \frac{\partial F}{\partial y}\displaystyle
\frac{\partial y}{\partial x}+\displaystyle \frac{\partial
F}{\partial u}\displaystyle \frac{\partial u}{\partial
x}+\displaystyle \frac{\partial F}{\partial v}\displaystyle
\frac{\partial v}{\partial x}=0$ $~~ $ $\Rightarrow$ $~~$ $\displaystyle \frac{\partial F}{\partial u}\displaystyle \frac{\partial u}{\partial x}+\displaystyle \frac{\partial F}{\partial v}\displaystyle \frac{\partial v}{\partial x}=-\displaystyle \frac{\partial F}{\partial x}$
$\displaystyle \frac{\partial G}{\partial x}\displaystyle
\frac{\partial x}{\partial x}+\displaystyle \frac{\partial
G}{\partial y}\displaystyle \frac{\partial y}{\partial
x}+\displaystyle \frac{\partial G}{\partial u}\displaystyle
\frac{\partial u}{\partial x}+\displaystyle \frac{\partial
G}{\partial v}\displaystyle \frac{\partial v}{\partial x}=0$ $~~$ $\Rightarrow$ $~~$ $\displaystyle \frac{\partial G}{\partial
u}\displaystyle \frac{\partial u}{\partial x}+\displaystyle
\frac{\partial G}{\partial v}\displaystyle \frac{\partial
v}{\partial x}=-\displaystyle \frac{\partial G}{\partial x}$
Lo anterior se puede ver como un sistema de 2 ecuaciones con 2 incógnitas $\displaystyle \frac{\partial u}{\partial x}$ y $\displaystyle \frac{\partial v}{\partial x}$. Aquí se ve que para que el sistema tenga solución
$det \left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial
u}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|\neq0$ en $(P)$ (el $det$ Jacobiano) y según la regla de Cramer.
$\displaystyle \frac{\partial u}{\partial x}=-\frac{\det
\left|\begin{array}{cc} \displaystyle -\frac{\partial F}{\partial
x}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle -\frac{\partial G}{\partial x}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|}{\det
\left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial
u}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|}$, $~~$ $\displaystyle \frac{\partial v}{\partial x}=-\frac{\det \left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial u}&\displaystyle -\frac{\partial F}{\partial x} \\ \displaystyle \frac{\partial G}{\partial u}&\displaystyle -\frac{\partial G}{\partial x}\end{array}\right|}{det \left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial F}{\partial v} \\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial v}\end{array}\right|}$ $~~~~$ (con los dos $det$ Jacobianos).
Análogamente si derivamos con respecto a $y$ obtenemos
$\displaystyle \frac{\partial F}{\partial
u}\displaystyle \frac{\partial u}{\partial y}+\displaystyle
\frac{\partial F}{\partial v}\displaystyle \frac{\partial
v}{\partial y}=-\displaystyle \frac{\partial F}{\partial y}$
$\displaystyle \frac{\partial G}{\partial
u}\displaystyle \frac{\partial u}{\partial y}+\displaystyle
\frac{\partial G}{\partial v}\displaystyle \frac{\partial
v}{\partial y}=-\displaystyle \frac{\partial G}{\partial y}$
de donde
$\displaystyle \frac{\partial u}{\partial y}=-\frac{\det
\left|\begin{array}{cc} \displaystyle -\frac{\partial F}{\partial
y}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle -\frac{\partial G}{\partial y}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|}{det
\left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial
u}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|}$, $~~$ $\displaystyle \frac{\partial v}{\partial y}=-\frac{\det \left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial u}&\displaystyle -\frac{\partial F}{\partial y} \\ \displaystyle \frac{\partial G}{\partial u}&\displaystyle -\frac{\partial G}{\partial y}\end{array}\right|}{det \left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial F}{\partial v} \\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial v}\end{array}\right|}$ $~~~~$ (con los dos $det$ Jacobianos).
Al determinante $det \left|\begin{array}{cc} \displaystyle
\frac{\partial F}{\partial u}&\displaystyle \frac{\partial
F}{\partial v}
\\ \displaystyle \frac{\partial G}{\partial u}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|$ lo llamamos Jacobiano y lo denotamos por $\displaystyle \frac{\partial (F,G)}{\partial (u,v)}$.
Teorema de la Función Implícita (sistemas de ecuaciones)
Teorema 3. Considere las funciones $z_{1}=F(x,y,u,v)$ y $z_{2}=G(x,y,u,v)$. Sea $P=(x,y,u,v) \in \mathbb{R}^{4}$ un punto tal que $F(P)=G(P)=0$. Suponga que en una bola $\textit{B} \in \mathbb{R}^{4}$ de centro $P$ las funciones $F$ y $G$ tienen (sus cuatro) derivadas parciales continuas. Si el Jacobiano $\displaystyle \frac{\partial
(F,G)}{\partial (u,v)}(P)\neq0$ entonces las expresiones $F(x,y,u,v)=0$ y $G(x,y,u,v)=0$ definen funciones (implícitas) $u=\varphi_{1}(x,y)$ y $v=\varphi_{2}(x,y)$ definidas en una vecindad $v$ de $(x,y)$ las cuales tienen derivadas parciales continuas en $v$ que se pueden calcular como se menciona arriba.
Demostración. Dado que $$det
\left|\begin{array}{cc} \displaystyle \frac{\partial F}{\partial
u}&\displaystyle \frac{\partial F}{\partial v}
\\ \displaystyle \frac{\partial F}{\partial u}&\displaystyle \frac{\partial G}{\partial
v}\end{array}\right|\neq 0$$ entonces $\displaystyle{\frac{\partial F}{\partial u}(p)}$, $\displaystyle{\frac{\partial F}{\partial v}(p)}$, $\displaystyle{\frac{\partial G}{\partial u}(p)}$, $\displaystyle{\frac{\partial G}{\partial v}(p)}$ no son cero al mismo tiempo, podemos suponer sin perdida de generalidad que $\displaystyle{\frac{\partial G}{\partial v}(p)}\neq0$. Entonces la función $z_{1}=G(x,y,u,v)$ satisface las hipótesis del T.F.I y en una bola abierta con centro p, v se puede escribir como $v=\psi(x,y,u)$.
Hacemos ahora
$$H(x,y,u)=F(x,y,u,\psi(x,y,u))$$ y tenemos que
$$\frac{\partial H}{\partial u}=\frac{\partial F}{\partial x}\frac{\partial x}{\partial u}+\frac{\partial F}{\partial y}\frac{\partial y}{\partial u}+\frac{\partial F}{\partial u}\frac{\partial u}{\partial u}+\frac{\partial F}{\partial v}\frac{\partial \psi}{\partial u}=\frac{\partial F}{\partial u}+\frac{\partial F}{\partial v}\frac{\partial \psi}{\partial u}$$
por otro lado
$$\frac{\partial \psi}{\partial u}=-\frac{\frac{\partial G}{\partial u}}{\frac{\partial G}{\partial v}}$$
por lo tanto
$$\frac{\partial H}{\partial u}=\frac{\partial F}{\partial u}+\frac{\partial F}{\partial v}\frac{\partial \psi}{\partial u}=\frac{\partial F}{\partial u}+\frac{\partial F}{\partial v}\left(-\frac{\frac{\partial G}{\partial u}}{\frac{\partial G}{\partial v}}\right)=\frac{\frac{\partial F}{\partial u}\frac{\partial G}{\partial v}-\frac{\partial F}{\partial v}\frac{\partial G}{\partial u}}{\frac{\partial G}{\partial v}}\neq0$$por lo tanto para $H(x,y,u)=0$ tenemos que existe una función $u=\varphi_{1}(x,y)$ y por lo tanto $v=\psi(x,y,u)=\psi(x,y,\varphi_{1}(x,y,u))=\varphi_{2}(x,y)$ y por tanto $u,v $ se pueden expresar en términos de $x,y$ en una vecindad de $p$. $\square$
Tarea Moral
1.-Mostrar que cerca del punto $(x,y,u,v)=(1,1,1,1)$ podemos resolver
$$xu+yvu^2=2$$ y $$xu^3+y^2v^4=2$$ de manera única para $u$ y $v$ como funciones de $x$ y $y$. Verifica la existencia de la solución definiendo el sistema mediante las funciones $F_1(x,y,u,v)$ y $F_2(x,y,u,v)$ y calcula su determinante.
2.-Calcular $\displaystyle \frac{\partial u}{\partial x}(1,1)$
1.-Mostrtar que cerca del punto $(x,y,u,v)=(1,1,1,1)$ podemos resoler:
$xu+yvu^2 = 2$ y $xu^3+y^2+v^4= 2$ de manera única para $u~y~v$ en término de $x~y~y$. Calcular $\dfrac{\partial u}{\partial v}(1,1)$
2.-Mostrar que las ecuaciones
$$x^2-y^2-u^3+v^2+4=0$$ y
$$2xy+y^2-2u^2+3v^4+8$$ determinan funciones $u(x,y)$ y v$(x,y)$ cerca de $x=2$ y $y=-1$ tales que $u(2,-1)=2$ y $v(2,-1)=1$.
3.-Calcula $\displaystyle \frac{\partial u}{\partial x}$ en $(2,-1)$
4.- Considera el sistema definido por $$F_1(x,y,u,v)=x+y+u+v-4=0$$ $$F_2(x,y,u,v)=x^2+y^2+u^2+v^2-6=0$$. Comprueba que para el punto $(1,1,1,1)$ satisface el sistema. Usa el Teorema de la Función Implícita para demostrar que $u$ y $v$ pueden expresarse como funciones de $x$ y $y$ cerca de $(1,1,1,1)$.
5.- Calcula las derivadas parciales $\displaystyle \frac{\partial u}{\partial x}$ y $\displaystyle \frac{\partial v}{\partial x}$ en $(1,1,1,1)$
Más adelante
Analizaremos cómo la función inversa es un caso particular del caso general de la función implícita.