Introducción
En la entrada anterior comenzamos a estudiar el plano fase para sistemas de dos ecuaciones homogéneas con coeficientes constantes de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}.$$ En particular, revisamos el caso cuando los valores propios del sistema son reales distintos y no son cero. Vimos que el comportamiento de las curvas y la estabilidad del punto de equilibrio dependen del signo de los valores propios. Así, cuando los signos difieren tenemos un punto silla (inestable), cuando los dos valores propios son negativos tenemos un atractor (punto de equilibrio asintóticamente estable) y finalmente, cuando ambos valores propios son positivos el punto de equilibrio es un repulsor (inestable).
Es turno ahora de analizar el plano fase para sistemas cuyos valores propios son complejos. Sabemos que si $\lambda_{1}=\alpha + \beta i$ es un valor propio del sistema, entonces su conjugado $\lambda_{2}=\alpha – \beta i$ también es un valor propio. Además la solución general a dichos sistemas tiene la forma $$\textbf{X}(t)=c_{1}e^{\alpha t}\left(\cos{\beta t}\begin{pmatrix} u_{1} \\ u_{2} \end{pmatrix}-\sin{\beta t}\begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}\right)+c_{2}e^{\alpha t}\left(\sin{\beta t} \begin{pmatrix} u_{1} \\ u_{2} \end{pmatrix}+\cos{\beta t} \begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}\right)$$ donde los vectores $(u_{1},u_{2})$ y $(v_{1},v_{2})$ son vectores tales que $$\textbf{w}=(u_{1},u_{2})+i(v_{1},v_{2})$$ es un vector propio para $\lambda_{1}$.
Estudiaremos las soluciones cuando $t \rightarrow \infty$. La forma del plano fase va a depender de la parte real $\alpha$ de los valores propios (nota que los dos valores propios tienen la misma parte real), por lo que distinguiremos tres casos, según $\alpha$ sea positivo, negativo o cero. Finalmente clasificaremos a los puntos de equilibrio según su estabilidad.
Plano fase para sistemas con valores propios complejos
En el primer video estudiamos de manera general el plano fase para sistemas de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ cuyos valores propios son complejos. Analizamos tres casos: cuando la parte real de los valores propios es positiva, negativa o cero.
En el segundo video resolvemos y dibujamos el plano fase para distintos sistemas con valores propios complejos.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
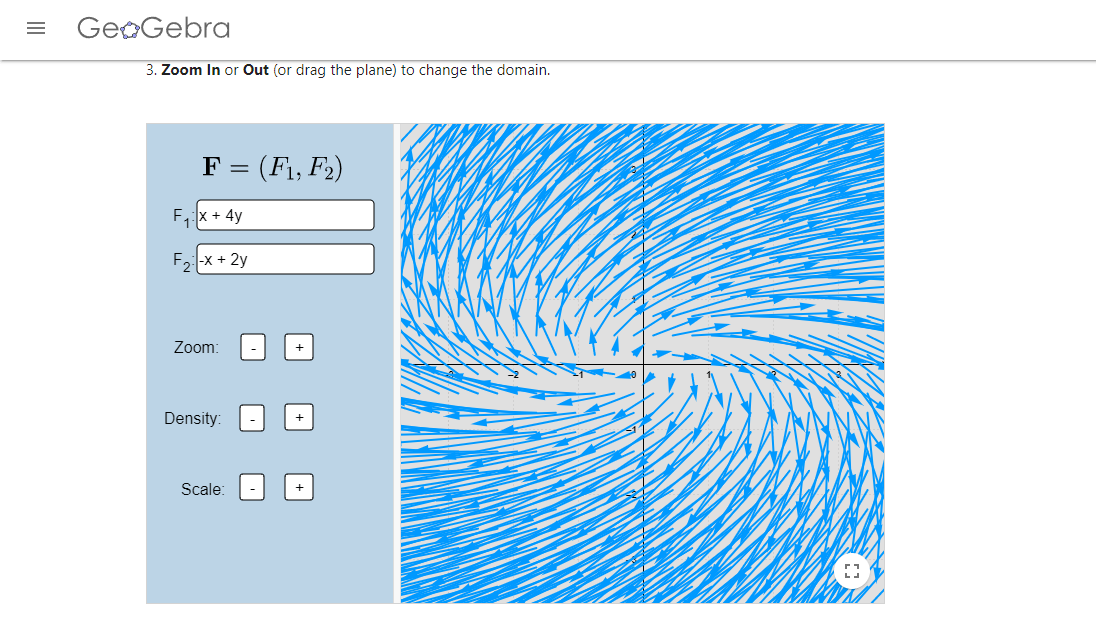
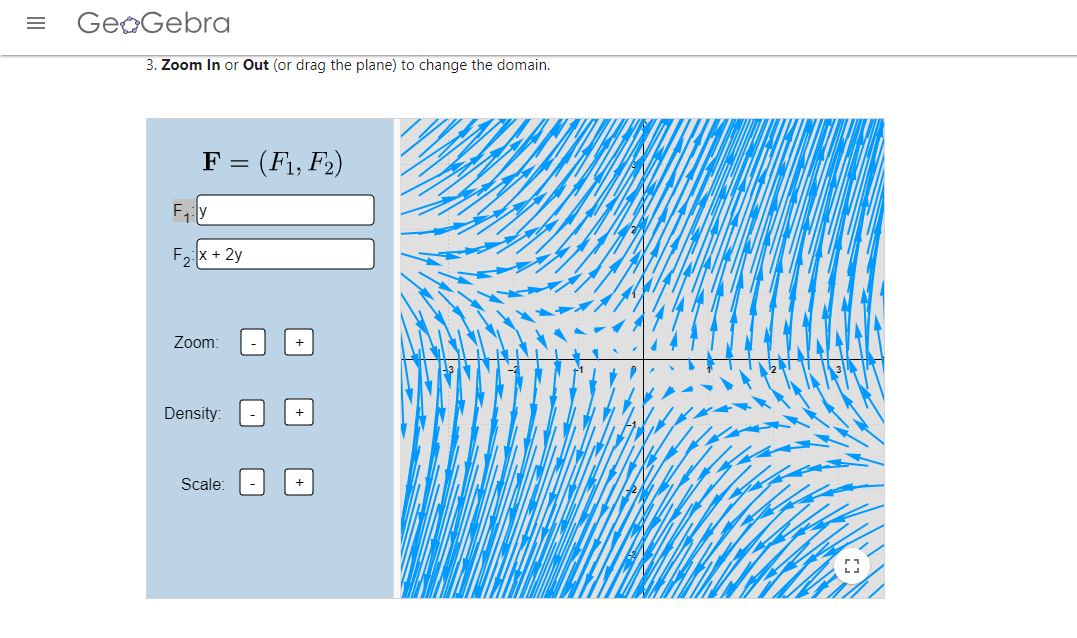
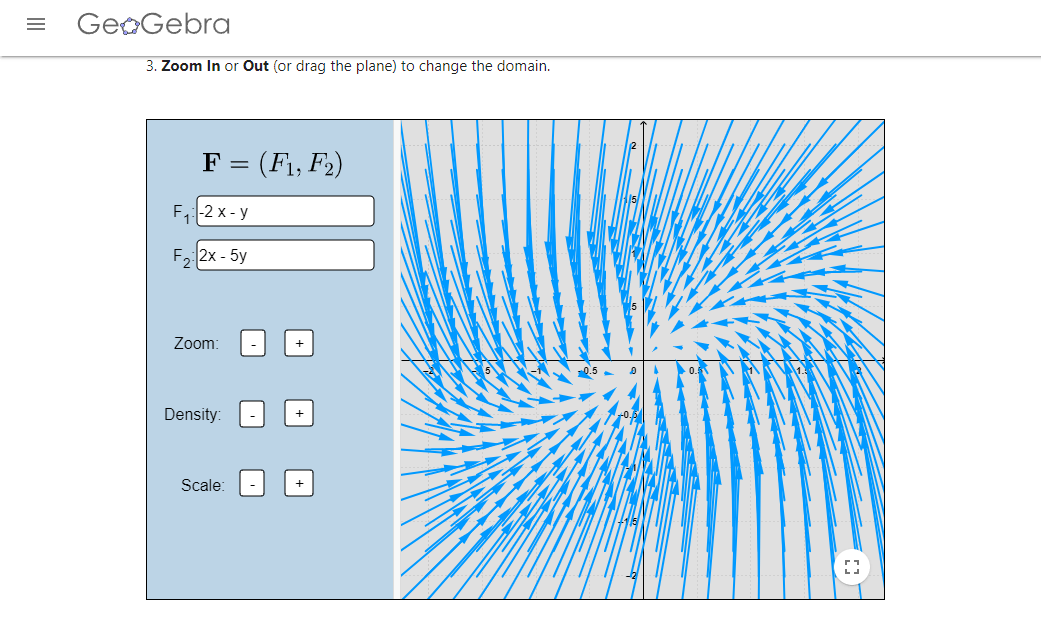
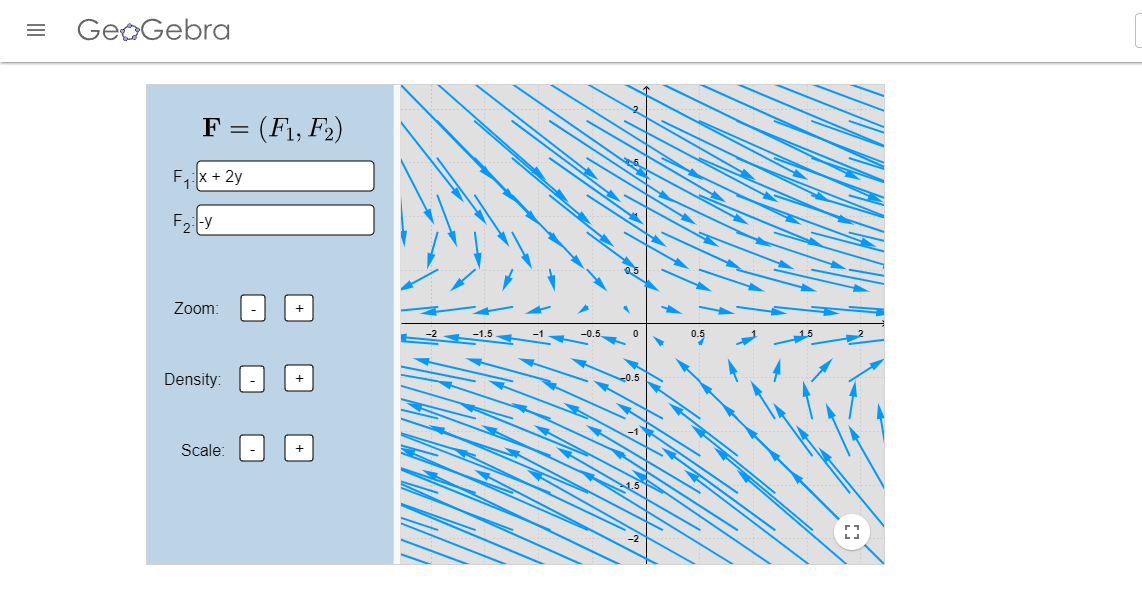
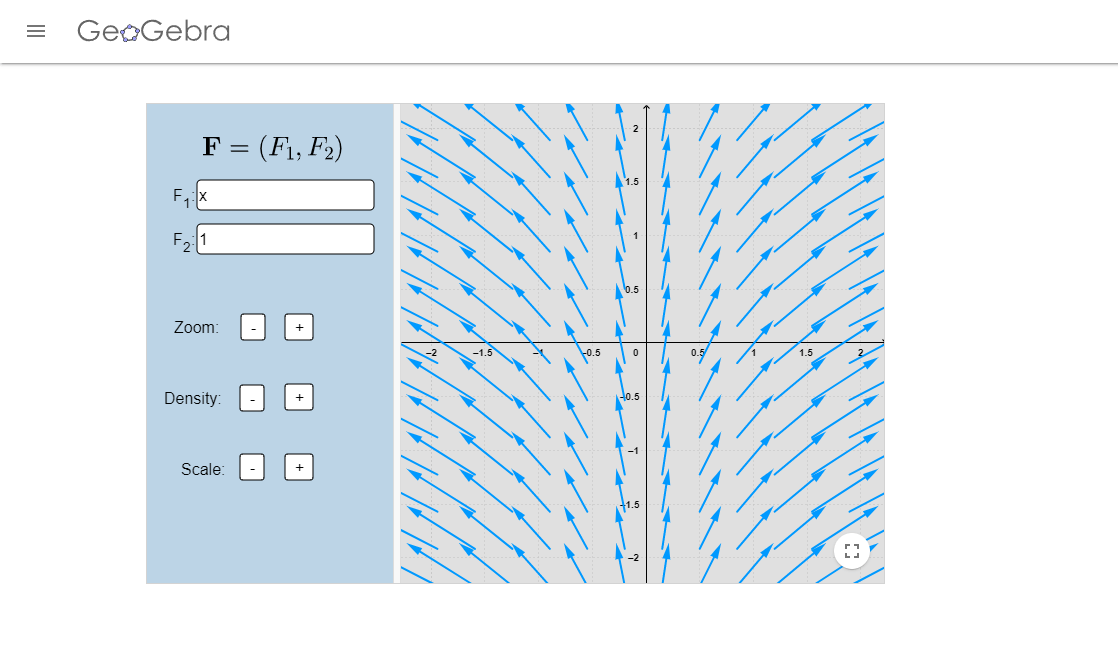
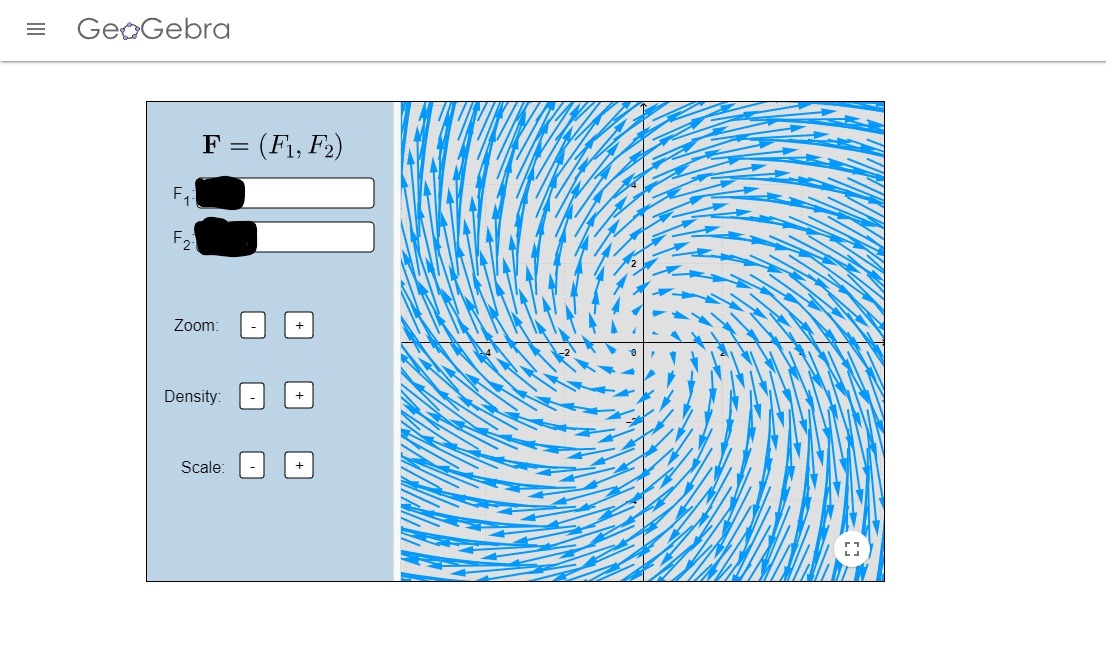
Los campos vectoriales de las imágenes fueron realizados en el siguiente enlace.
- Prueba que la función $$\textbf{X}(t)=\begin{pmatrix} (c_{1}u_{1}+c_{2}v_{1})\cos{\beta t}+(c_{2}u_{1}-c_{1}v_{1})\sin{\beta t} \\ (c_{1}u_{2}+c_{2}v_{2})\cos{\beta t}+(c_{2}u_{2}-c_{1}v_{2})\sin{\beta t} \end{pmatrix}$$ es periódica, con período $\frac{2\pi}{\beta}$, donde $c_{1},c_{2},u_{1},u_{2},v_{1},v_{2}$ son valores constantes.
- De acuerdo al ejercicio anterior, concluye que si un sistema homogéneo con coeficientes constantes tiene un valor propio complejo $\lambda_{1}=\beta i$ con vector propio asociado $\textbf{w}=(u_{1},u_{2})+i(v_{1},v_{2})$, entonces las curvas en el plano fase son cerradas.
- Considera ahora la función $$\textbf{X}(t)=e^{\alpha t}\begin{pmatrix} (c_{1}u_{1}+c_{2}v_{1})\cos{\beta t}+(c_{2}u_{1}-c_{1}v_{1})\sin{\beta t} \\ (c_{1}u_{2}+c_{2}v_{2})\cos{\beta t}+(c_{2}u_{2}-c_{1}v_{2})\sin{\beta t} \end{pmatrix}$$ con $\alpha \neq 0$. Prueba que los puntos en el plano que son imagen de valores periódicos bajo la función del primer ejercicio se quedan contenidos en una recta. Concluye el comportamiento espiral de las soluciones a sistemas de ecuaciones con valores complejos cuya parte real es distinta de cero.
- Prueba que el punto de equilibrio del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & b \\ -b & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ es un centro.
- Resuelve y dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 2 & 1 \\ -2 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}.$$
- Encuentra la solución general y dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 1 \\ -1 & -1 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}.$$
- Dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 1 \\ -5 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}.$$
(Recuerda que puedes apoyarte del campo vectorial asociado para dibujar el plano fase).
Más adelante
Seguimos avanzando en el estudio del plano fase para sistemas homogéneos con coeficientes constantes. Ya sabemos la forma de las soluciones para sistemas cuyos valores propios son reales distintos y no nulos, o complejos. En la próxima entrada continuaremos revisando el plano fase, pero ahora para sistemas que tienen valores propios repetidos.
¡Hasta la próxima!
Entradas relacionadas
- Ir a Ecuaciones Diferenciales I
- Entrada anterior del curso: Plano fase para sistemas lineales con valores propios reales distintos no nulos
- Siguiente entrada del curso: Plano fase para sistemas lineales con valores propios repetidos
- Notas escritas relacionadas con el tema: Teoría cualitativa de los sistemas lineales homogéneos. Valores propios complejos
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»