
Introducción
En la entrada anterior comenzamos el estudio cualitativo a los sistemas de ecuaciones no lineales de primer orden. A través de algunos ejemplos vimos la complejidad de los planos fase para dichos sistemas, por lo que no es posible clasificar a dichos planos y a sus puntos de equilibrio como lo hicimos en el caso lineal, y tratar de interpretarlos de manera completa también es muy complicado.
Un paso importante que dimos fue estudiar las curvas solución cercanas a los puntos de equilibrio del sistema. Por medio de la matriz jacobiana del campo vectorial asociado, es decir la matriz $$\textbf{DF}(x,y)=\begin{pmatrix} \frac{\partial{F_{1}}}{\partial{x}}(x_{0},y_{0}) & \frac{\partial{F_{1}}}{\partial{y}}(x_{0},y_{0}) \\ \frac{\partial{F_{2}}}{\partial{x}}(x_{0},y_{0}) & \frac{\partial{F_{1}}}{\partial{y}}(x_{0},y_{0}) \end{pmatrix}$$ logramos linealizar el sistema y gracias a el Teorema de Hartman – Grobman, logramos hallar el comportamiento de las soluciones cerca de los puntos de equilibrio, siempre y cuando los valores propios del sistema lineal tuvieran parte real no nula. En tal caso, las soluciones se comportan de una manera similar a las soluciones del sistema lineal que obtuvimos mediante la linealización. Nuestro objetivo sigue siendo tratar de entender el plano fase completo de un sistema no lineal.
En esta entrada vamos a estudiar uno de los métodos que nos puede ayudar a resolver este problema. Dado un sistema de ecuaciones $$\dot{\textbf{X}}=\textbf{F}(\textbf{X})=(F_{1}(\textbf{X}),…,F_{n}(\textbf{X}))$$ vamos a definir la $x_{i}$-nulclina como el conjunto de puntos tales que la función $F_{i}$ se anula. Para sistemas de dos ecuaciones vamos a definir la $x$-nulclina y la $y$-nulclina. Veremos cómo se comporta el campo vectorial sobre estos conjuntos, y dado que podemos dibujar en el plano las curvas que los representan (ya que son las curvas de nivel dadas por $F_{1}(x,y)=0$ y $F_{2}(x,y)=0$), estas curvas van a separar al plano en distintas regiones. Lo que haremos será estudiar el campo vectorial, y por tanto el comportamiento de las soluciones sobre cada una de estas regiones. Al final podremos hacer un esbozo del plano fase para el sistema no lineal.
Las nulclinas y el plano fase
En el primer video definimos de forma general las nulclinas de un sistema de ecuaciones $$\dot{\textbf{X}}=\textbf{F}(\textbf{X})=(F_{1}(\textbf{X}),…,F_{n}(\textbf{X})).$$ Como siempre, nos restringimos al caso de sistemas de dos ecuaciones para destacar los aspectos más importantes de la $x$-nulclina y la $y$-nulclina.
En el segundo video aplicamos el método de las nulclinas para esbozar el plano fase de dos sistemas de ecuaciones no lineales.
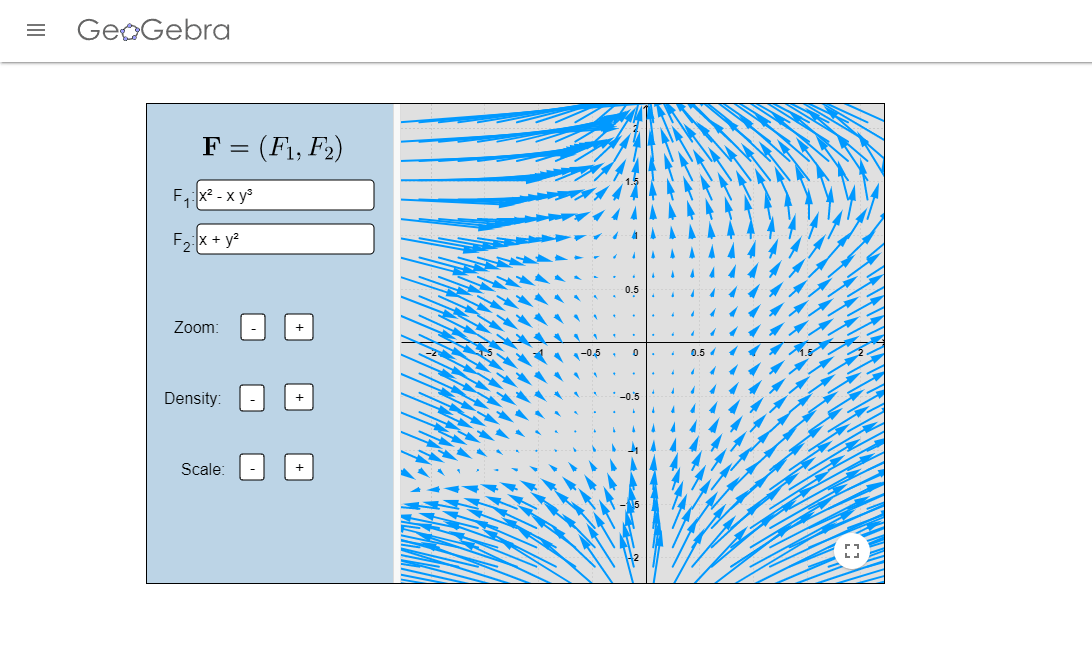
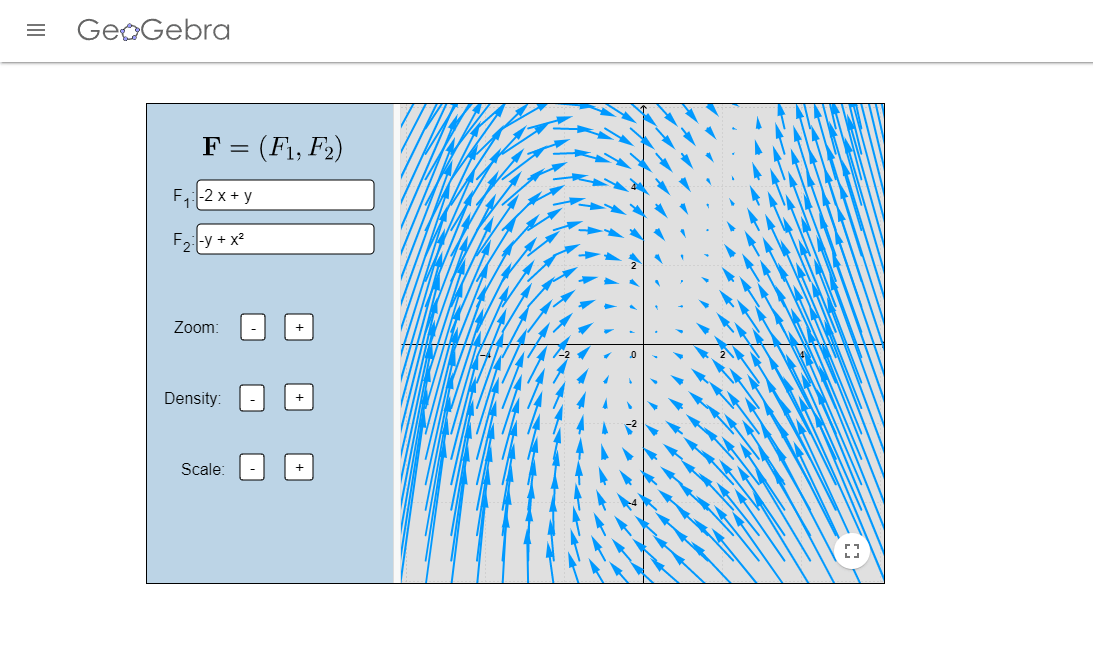
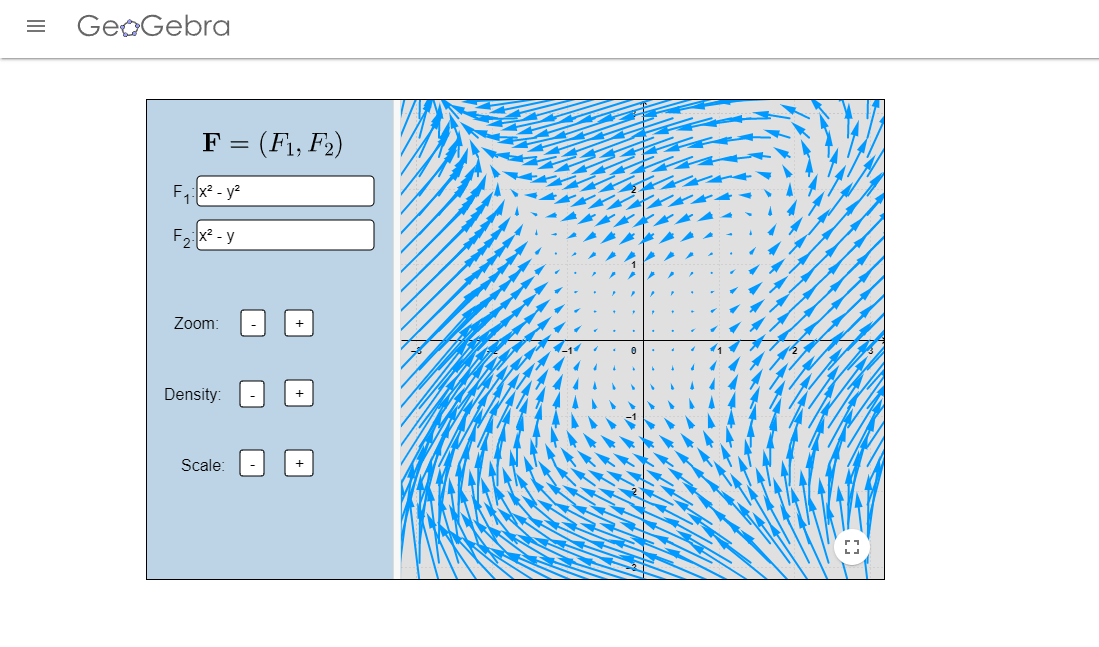
Los campos vectoriales que aparecen en los videos fueron realizados en el siguiente enlace.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
- Considera el sistema $$\begin{array}{rcl} \dot{x} & = & F_{1}(x,y) \\ \dot{y} & = & F_{2}(x,y) \end{array}.$$ Muestra que el conjunto de puntos de equilibrio del sistema es la intersección de la $x$-nulclina y la $y$-nulclina.
- Para el sistema $$\begin{array}{rcl} \dot{x} & = & x^{2}-x \\ \dot{y} & = & x^{2}-y \end{array}$$ determina las nulclinas, dibújalas en el plano, y con ayuda de estas esboza el plano fase del sistema.
- Utilizando el método de las nulclinas, esboza el plano fase para el sistema $$\begin{array}{rcl} \dot{x} & = & y \\ \dot{y} & = & x-x^{2} \end{array}.$$
- Haz lo mismo que en el ejercicio anterior para el sistema $$\begin{array}{rcl} \dot{x} & = & 2x^{2}+xy-2x \\ \dot{y} & = & y^{2}-y \end{array}.$$
- Considera el sistema de Volterra – Lotka $$\begin{array}{rcl} \dot{x} & = & x(10-x-y) \\ \dot{y} & = & y(30-2x-y) \end{array}$$ el cual modela una interacción del tipo depredador – presa. Mediante el método de las nulclinas esboza el plano fase del sistema e interpreta su significado respecto a la interacción de las dos especies en competencia. (Recuerda que el número de especies es no negativa, así que enfócate únicamente en el primer cuadrante del plano).
Más adelante
Hemos logrado conocer el plano fase completo de algunos sistemas no lineales a través del método de las nulclinas. Sin embargo, este método está sujeto a la forma del campo vectorial asociado al sistema. Entre más complejo sea el campo, más difícil será encontrar las nulclinas y hacer el estudio del plano fase.
En la próxima entrada veremos un tipo de sistemas en particular, que tienen un plano fase que podremos estudiar por completo mediante las curvas de nivel de una función que va a definir al sistema. Estos son los sistemas hamiltonianos, y la función que los define será llamada función hamiltoniana.
¡Hasta la próxima!
Entradas relacionadas
- Ir a Ecuaciones Diferenciales I
- Entrada anterior del curso: Sistemas de ecuaciones no lineales. Linealización de puntos de equilibrio
- Siguiente entrada del curso: Sistemas hamiltonianos
- Notas escritas relacionadas con el tema: Las nulclinas en el estudio cualitativo de los sistemas no lineales
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
{kind=link}