Introducción
Vamos a finalizar esta serie de entradas referentes al plano fase de sistemas de dos ecuaciones lineales homogéneas con coeficientes constantes de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ estudiando el caso cuando el sistema tiene al menos un cero como valor propio.
En las entradas anteriores revisamos los casos cuando los valores propios son reales distintos y no nulos, son complejos o se repiten, por lo que el caso que revisaremos en esta entrada es el último por estudiar. En todos los casos anteriores el punto de equilibrio es único y se encuentra en el punto $(0,0)$ del plano fase. Sin embargo, cuando el cero es un valor propio de la matriz asociada al sistema resultará que no habrá un único punto equilibrio, sino que tendremos una infinidad de dichos puntos. Es por eso que dejamos este caso al final.
Veremos cómo se distribuyen los puntos de equilibrio en el plano fase. Finalmente las curvas solución serán muy fáciles de dibujar según el análisis que realizaremos de la solución general al sistema, que será de la forma $$\textbf{X}(t)=c_{1}\begin{pmatrix} u_{1} \\ u_{2} \end{pmatrix}+c_{2}e^{\lambda_{2} t}\begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}$$ donde $(u_{1},u_{2})$ es un vector propio asociado al valor propio $\lambda_{1}=0$ y $(v_{1},v_{2})$ es un vector propio asociado al valor propio $\lambda_{2} \neq 0$ (si $\lambda_{2}=0$ la solución general se simplifica aún más y es igualmente sencillo hacer el análisis del plano fase).
Dicho lo anterior, vamos a comenzar.
Plano fase para sistemas con cero como valor propio
En el primer video analizamos el plano fase para un sistema de ecuaciones de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ cuando este tiene a cero como un valor propio asociado.
En el segundo video dibujamos el plano fase de algunos sistemas en particular que tienen al menos un valor propio igual a cero.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
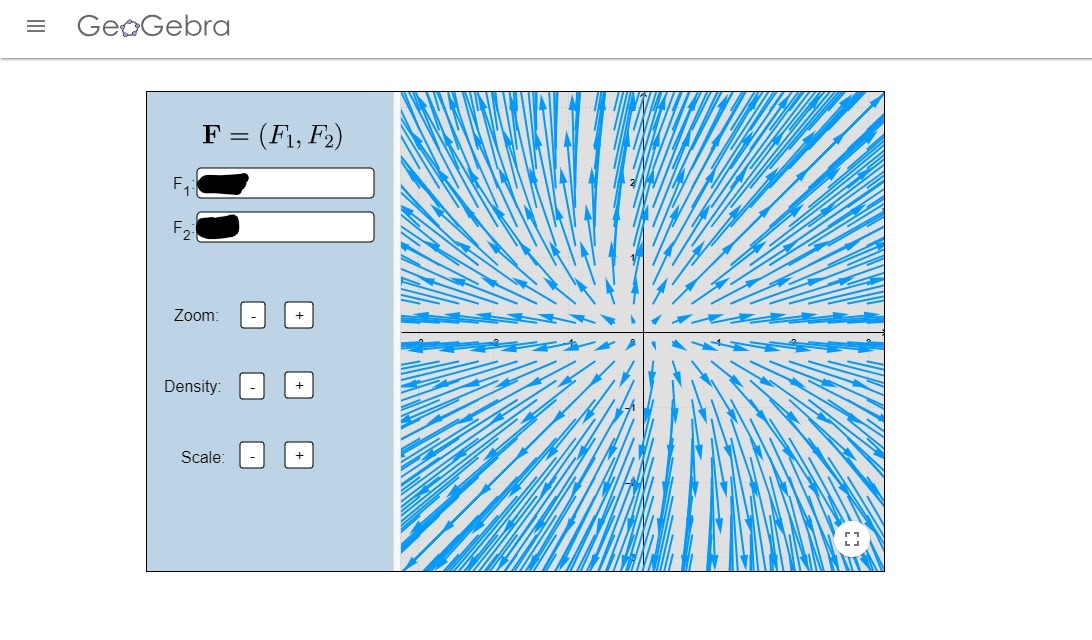
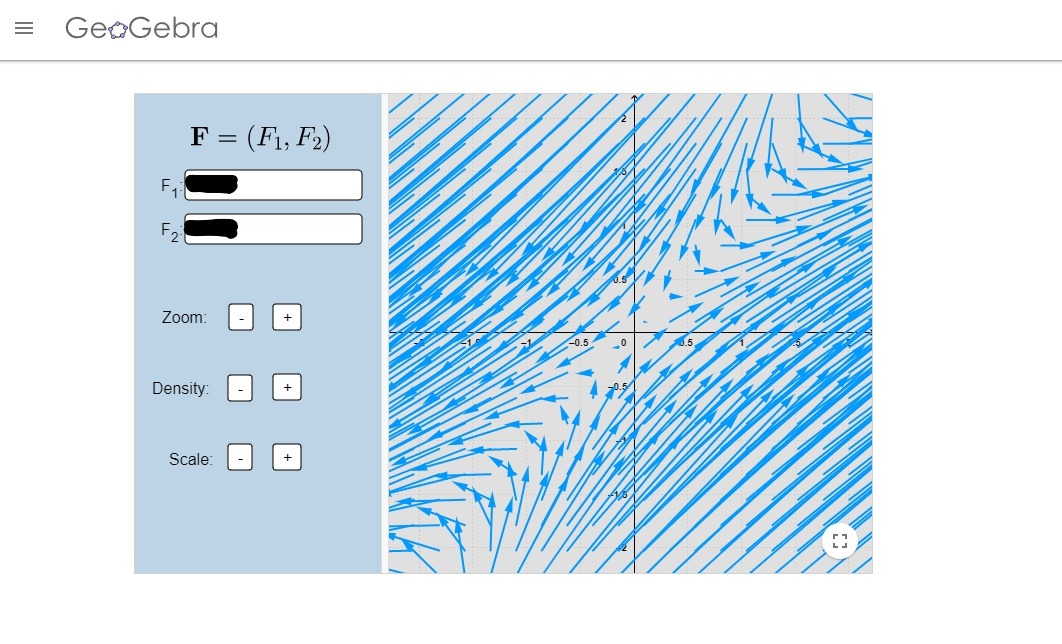
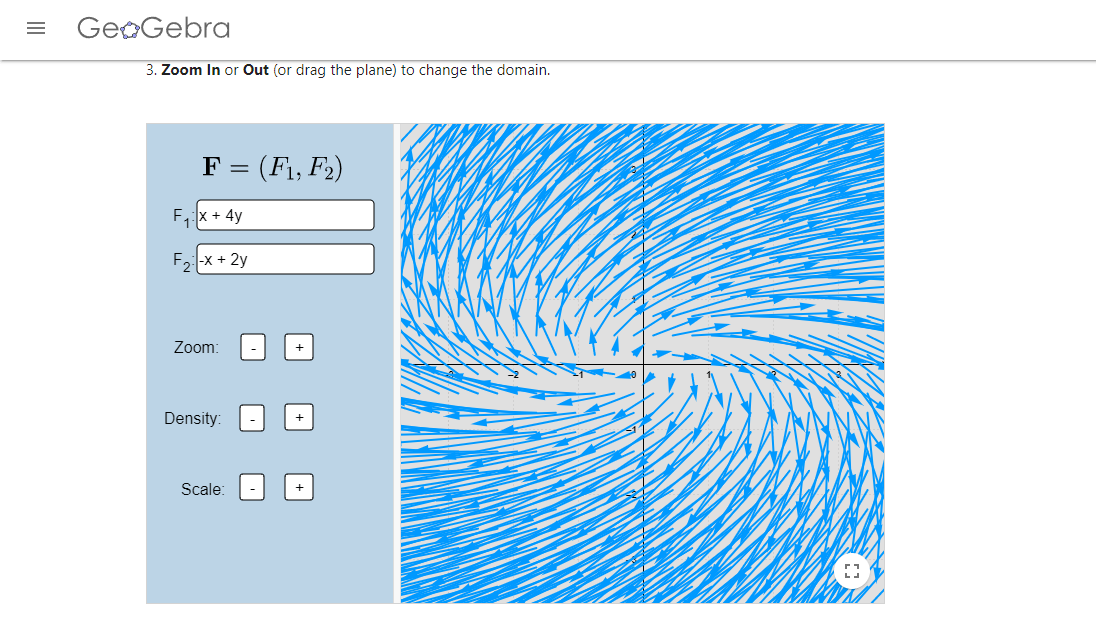
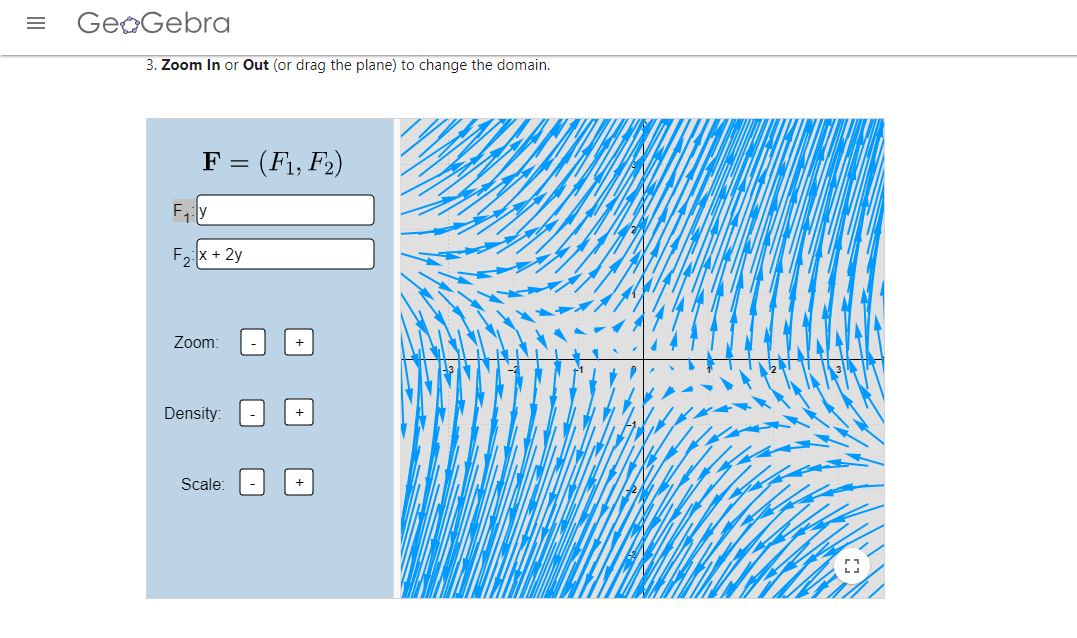
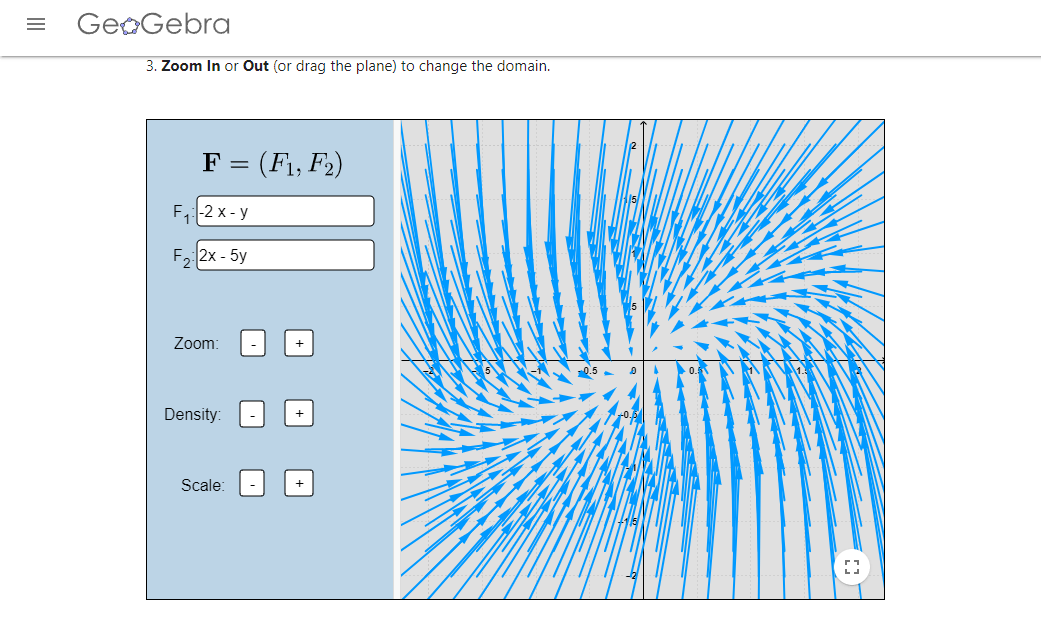
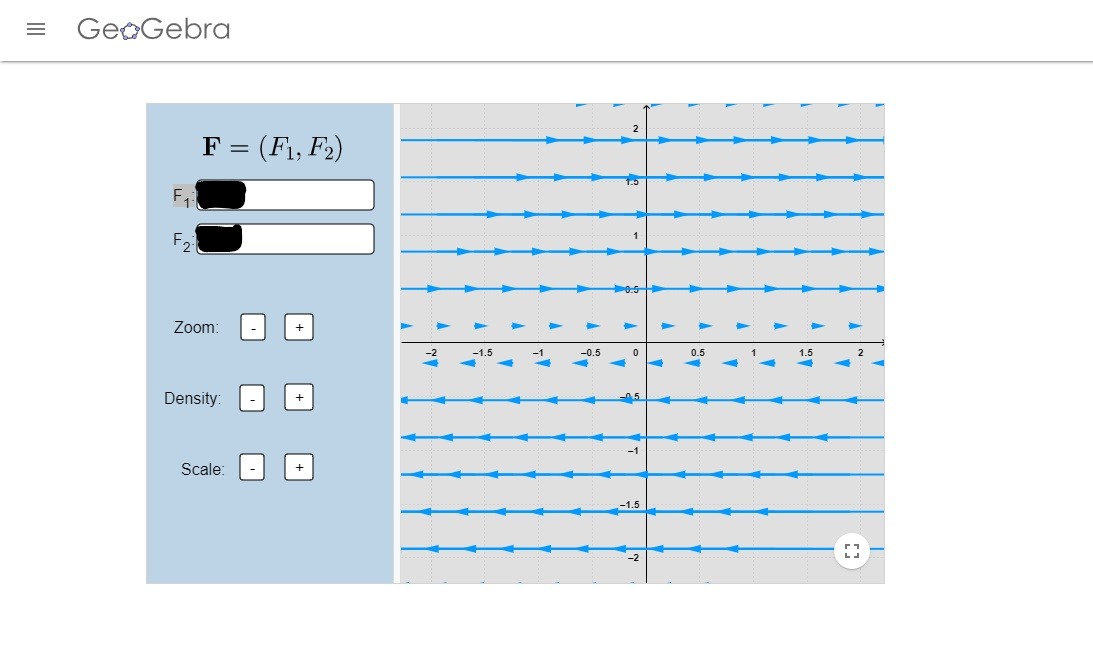
Los campos vectoriales de las imágenes fueron realizados en el siguiente enlace.
- Encuentra todas las matrices de tamaño $2 \times 2$ diagonalizables cuyo único valor propio es cero.
- Encuentra todos los sistemas de ecuaciones lineales homogéneos con coeficientes constantes cuyo campo vectorial se ve de la siguiente manera:
- En el segundo video dibujamos los planos fase de los siguientes sistemas $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} -1 & 1 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}$$ $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 2 \\ 0 & 0 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$ ¿Qué puedes decir acerca de los puntos de equilibrio en cada caso? ¿Son estables, asintóticamente estables, inestables, o ninguno de los tres?
- Encuentra la solución general del siguiente sistema y dibuja su plano fase: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 2 \\ 0 & 5 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
- Resuelve el siguiente sistema y dibuja su plano fase: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 0 \\ 5 & 0 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
- Encuentra la solución general y dibuja el plano fase del siguiente sistema: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 4 & 6 \\ -2 & -3 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Más adelante
Hemos terminado de estudiar el plano fase para sistemas de dos ecuaciones lineales homogéneas con coeficientes constantes. Determinamos el comportamiento de las soluciones en el plano y la estabilidad de los puntos de equilibrio en función de los valores propios del sistema.
Estamos a punto de comenzar a estudiar sistemas no lineales, al menos de manera cualitativa (ya que estos sistemas no los sabemos resolver analíticamente). Pero antes vamos a hacer un resumen de todo el análisis realizado recientemente en un dibujo que clasifica las formas del plano fase según dos características de la matriz asociada al sistema: la traza (que es la suma de los elementos en la diagonal) y su determinante.
¡Hasta la próxima!
Entradas relacionadas
- Ir a Ecuaciones Diferenciales I
- Entrada anterior del curso: Plano fase para sistemas lineales con valores propios repetidos
- Siguiente entrada del curso: El plano traza – determinante
- Notas escritas relacionadas con el tema: Teoría cualitativa de los sistemas lineales homogéneos. Valores propios nulos
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»