Propiedades de los Conjuntos abiertos y cerrados
Proposición:Si A y B son subconjuntos abiertos de $\mathbb{R}^{n}$, entonces $A\bigcup B$ es un conjunto abierto de $\mathbb{R}^{n}$.
Demostración.
Sea $\overline{x}\in A\cup B$. Se tiene entonces que $\overline{x}\in A$ ó $\overline{x}\in B$. Si $\overline{x}\in A$, entonces, puesto que A es abierto existe $r>0$ tal que $B_{r}(\overline{x})\subset A$, luego $B_{r}(\overline{x})\subset A\cup B$ Si $\overline{x}\in B$, entonces, puesto que B es abierto existe $r>0$ tal que $B_{r}(\overline{x})\subset B$, luego $B_{r}(\overline{x})\subset A\cup B$. En cualquiera de los casos, existe una bola abierta $B_{r}$ contenida en $A\cup B$. $\therefore$ $A\cup B$ es abierto.$~~\blacksquare$
Proposición. Si A y B son subconjuntos abiertos de $\mathbb{R}^{n}$, entonces $A\bigcap B$ es un conjunto abierto de $\mathbb{R}^{n}$.
Demostración. Sea $\overline{x}\in A\cup B$. Se tiene entonces que $\overline{x}\in A$ y $\overline{x}\in B$. Puesto que A es abierto $\exists~r_{1}>0$ tal que $B(\overline{x},r_{1})\subset A$. Puesto que b es abierto $\exists~r_{2}>0$ tal que $B(\overline{x},r_{2})\subset B$.\Sea $r=\min{r_{1},r_{2}}$, entonces se tiene que
\begin{align*} B(\overline{x},r) & \subset B(\overline{x},r_{1}) \\ B(\overline{x},r) & \subset B(\overline{x},r_{2}) \end{align*}
Por lo tanto $B(\overline{x},r)\subset A$ y $B(\overline{x},r)\subset B$, o sea $B(\overline{x},r)\subset A\cap B$.$~~\blacksquare$
Proposición. Si A y B son subconjuntos cerrados de $\mathbb{R}^{n}$, entonces $A\bigcup B$ es un conjunto cerrado de $\mathbb{R}^{n}$.
Demostración. Para mostrar que $A\bigcup B$ es un conjunto cerrado, tenemos que mostrar que $(A\bigcup B)^{c}$ es un conjunto abierto, al ser A, B conjuntos cerrados entonces $A^{c},~B^{c}$ son conjuntos abiertos y por leyes de D’morgan
$$(A\bigcup B)^{c}=A^{c}\bigcap B^{c}$$
ahora bien por el resultado anterior se tiene que la intersección de conjuntos abiertos es un conjunto abierto, esto prueba que $(A\bigcup B)^{c}$ es un conjunto abierto, por lo tanto $A\bigcup B$ es un conjunto cerrado.$~~\blacksquare$
Proposición. Si A y B son subconjuntos cerrados de $\mathbb{R}^{n}$, entonces $A\bigcap B$ es un conjunto cerrado de $\mathbb{R}^{n}$.
Demostración. Para mostrar que $A\bigcap B$ es un conjunto cerrado, tenemos que mostrar que $(A\bigcap B)^{c}$ es un conjunto abierto, al ser A, B conjuntos cerrados entonces $A^{c},~B^{c}$ son conjuntos abiertos y por leyes de D’morgan
$$(A\bigcap B)^{c}=A^{c}\bigcup B^{c}$$
ahora bien por el resultado anterior se tiene que la unión de conjuntos abiertos es un conjunto abierto, esto prueba que $(A\bigcap B)^{c}$ es un conjunto abierto, por lo tanto $A\bigcap B$ es un conjunto cerrado.$~~\blacksquare$
Generalizaciones de la proposiciones anteriores de la familias de conjuntos.
Proposición. La unión arbitraria de conjuntos abiertos en $\mathbb{R}^{n}$ es un conjunto abierto en $\mathbb{R}^{n}$.
Demostración.
Sea ${A_{\alpha}}$ una colección de subconjuntos de $\mathbb{R}^{n}$ tal que $A_{\alpha}$ es un conjunto abierto en $\mathbb{R}^{n}$. Sea $\displaystyle{A=\bigcup A_{\alpha}}$.
Sea $\overline{x}_{0}\in A$. Entonces existe $\alpha$ tal que $\overline{x}_{0}\in A_{\alpha}$ y como $A_{\alpha}$ es un conjunto abierto, existe $r>0$ tal que
$$B(\overline{x}_{0},r)\subset A{\alpha}\subset \bigcup A_{\alpha}=A$$
Por lo tanto A es abierto.$~~\blacksquare$
Propposición. La intersección finita de conjuntos abiertos en $\mathbb{R}^{n}$ es un conjunto abierto en $\mathbb{R}^{n}$.
Demostración. Sean $A_{1},A_{2},…,A_{k}$ subconjutos abiertos de $\mathbb{R}^{n}$. Sea $\displaystyle{B=\bigcap_{i=1}^{k}A_{i}=A_{1}\cap A_{2}\cap …\cap A_{k}}$.
Sea $\overline{x}_{0}\in B$. Entonces $\overline{x}_{0}\in A_{i}$ para toda $1\leq i\leq k$. Cada $A_{i}$ es un conjunto abierto. Por lo tanto existe $r_{i}>0$ tal que $B(\overline{x}_{0},r{i})\subset A_{i}$ para toda $1\leq i\leq k$. Sea $r=\min{r_{1},r_{2},…,r_{n}}>0$. Entonces
$$B(\overline{x}_{0},r)\subset B(\overline{x}_{0},r_{i})\subset A_{i}~~\forall~i=1,…,n$$
Por lo tanto
$$B(\overline{x}_{0},r)\subset \bigcap_{i=1}^{k}A_{i}=B$$
y por lo tanto B es un conjunto abierto.$~~\blacksquare$
Proposición. La unión finita de conjuntos cerrados en $\mathbb{R}^{n}$ es un conjunto cerrado en $\mathbb{R}^{n}$.
Demostración. Sean $A_{1},…,A_{k}\subset \mathbb{R}^{n}$ conjuntos cerrados y sea $\displaystyle{B=\bigcup_{i=1}^{n}A_{i}}$. Entonces
$$B^{c}=\left(\bigcup_{i=1}^{n}A_{i}\right)^{c}=\bigcap_{i=1}^{n}A^{c}_{i}$$
el cual es un conjunto abierto de $\mathbb{R}^{n}$. Por lo tanto B es un conjunto cerrado de $\mathbb{R}^{n}$.$~~\blacksquare$
Proposición. La intersección finita de conjuntos cerrados en $\mathbb{R}^{n}$ es un conjunto cerrado en $\mathbb{R}^{n}$.
Demostración. Sea ${A_{\alpha}}$ una colección de subconjuntos de $\mathbb{R}^{n}$ tales que cada $A_{\alpha}$ es cerrado en $\mathbb{R}^{n}$. Por lo tanto para cada $\alpha$, $A^{c}{\alpha}$ es un conjunto abierto en $\mathbb{R}^{n}$. Sea $\displaystyle{A=\bigcap{\alpha}A_{\alpha}}$ tal que
$$A^{c}=\left(\bigcap_{\alpha}A_{\alpha}\right)^{c}=\bigcup_{\alpha}A^{c}_{\alpha}$$
es un conjunto abierto en $\mathbb{R}^{n}$. Por lo tanto A es un conjunto cerrado en $\mathbb{R}^{n}$.$~~\blacksquare$
Definición. Un elemento $\bar{x}\in A$ se dice que es un $\textbf{punto interior}$ de $A$, si existe una bola abierta con centro en $\bar{x}$ contenida en $A$ es decir si $\exists$ $r>0$ tal que $B(\bar{a},r)\subset A$. Denotamos por $int(A)$ al conjunto formado por todos estos puntos, es decir $$int(A)=\{\overline{x}\in\mathbb{R}^{n}~|~\overline{x}~es~punto~interior~de~A\}$$
y diremos que este conjunto es el interior de A.
Ejemplo. Determinar el $int(A),~~Fr(A),~~ext(A)$ con
\[
A=\left[0,1\right]\times\left[0,1\right]\cap\left(\mathbb{Q}\times\mathbb{Q}\right)=\left\{ (x,y)\in\mathbb{R}^{2}~\big{|}~(x,y)\in\mathbb{Q}~~y~~0\leq x\leq1~~0\leq y\leq1\right\} .
\]
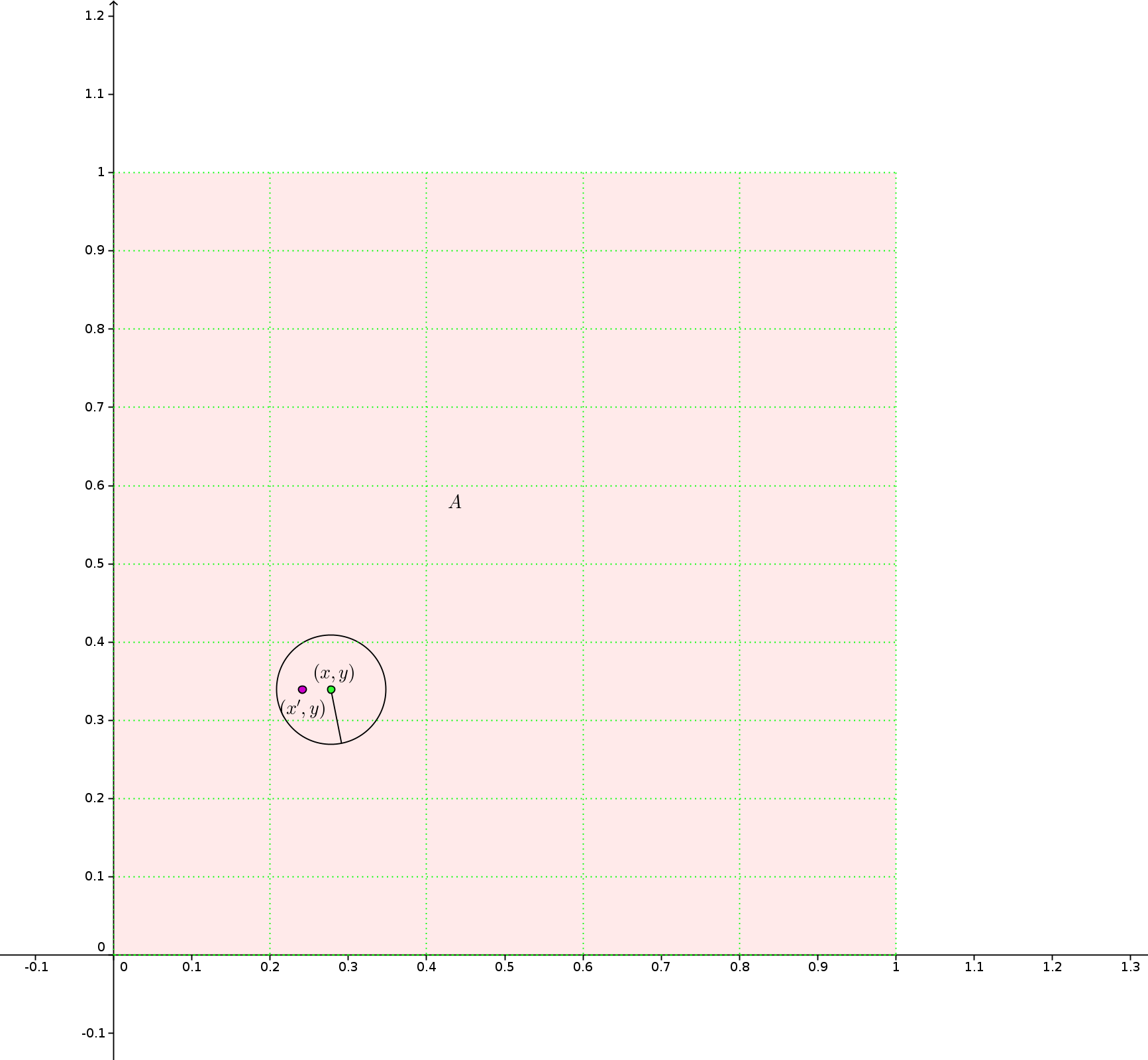
Solución. Primero analicemos la figura, ¿qué pasa si tomamos un $(x,y)$ en $A$ y un $r>0$?, ¿qué podemos observar?. Si recordamos la densidad de los irracionales sabemos que podemos encontrar un $x’$ irracional entre $x$ y $x+r$, entonces si tomamos el punto $(x’,y)$ podemos ver que esta dentro de $B_{r}(x,y)$, pero $(x’,y)$ no es un punto de $A$. Esto pasa para toda $r>0$ y todo $(x,y)$ en $A$. Entonces, podemos afirmar que el $int(A)=\emptyset$.
Ademas, podemos decir que para todo $(x,y)$ en $A$ y todo $r>0$ se tiene que $B_{r}(x,y)\cap A^{c}\neq\emptyset$. Usando el mismo argumento, pero ahora para los racionales, podemos decir que para cualquier $(x,y)$ y $r>0$ se tiene que $B_{r}(x,y)\cap A\neq\emptyset$.
Todo esto dentro del cuadrado $\left[0,1\right]\times\left[0,1\right]$. Entonces, podemos afirmar que $Fr(A)=\left[0,1\right]\times\left[0,1\right]$.
¿Que podemos decir del exterior? De lo anterior podemos deducir que
$ext(A)=\mathbb{R}{{}^2}-\left[0,1\right]\times\left[0,1\right]$.
Entonces, demostremos la siguiente afirmación:
Afirmación: $int(A)=\emptyset$
Demostración. Sean $(x,y)\in A$ y $r>0$. Mostraremos que $B_{r}(x,y)\cap A^{c}\neq\emptyset$, es decir, que para cualquier punto $(x,y)$ de $A$ y cualquier radio $r>0$, la bola $B_{r}(x,y)$ siempre contiene puntos de $A^{c}$, es decir, que $A$ no tiene puntos interiores.
Como $(x,y)\in A$, entonces $x\in\mathbb{Q}$ y por la densidad de los irracionales sabemos que siempre existe un $x’\notin\mathbb{Q}$ tal que $x<x'<x+r$……$\bigstar$
Tomemos el punto $(x’,y)$ y calculemos su distancia con $(x,y)$:
\[
\| (x,y)-(x’,y)\|=\| (x-x’,0)\|=\sqrt{(x-x’)^{2}}=\underset{**}{\underbrace{\left|x-x’\right|<r}}\text{ esta ultima desigualdad se cumple por }\bigstar
\] Veamos por que se cumple $**$. De $\bigstar$ tenemos que $x<x'<x+r$, restando $x$ tenemos $x-x<x’-x<x+r-x$ $\Longrightarrow0<x’-x<r$ como esto es positivo, le podemos sacar el valor absouto y se mantiene la desigualdad $0<|x’-x|<r$ y sabemos que $|a-b|=|b-a|$. Por lo tanto, $|x-x’|<r$.
Entonces, como $\left\Vert (x,y)-(x’,y)\right\Vert <r$, tenemos que $(x’,y)\in B_{r}(x,y)$, pero como $x’\notin\mathbb{Q}$ esto implica que $(x’,y)\notin\mathbb{Q}\times\mathbb{Q}$. Por lo tanto, $B_{r}(x,y)\cap\left(\mathbb{R}^{2}-\mathbb{Q}\times\mathbb{Q}\right)\neq\emptyset$.
Podemos observar que $A\subset\mathbb{Q}\times\mathbb{Q}$ $\Longrightarrow$ $B_{r}(x,y)\cap\left(\mathbb{R}^{2}-A\right)=B_{r}(x,y)\cap A^{c}\neq\emptyset$,
es decir, que para todo $r>0$ se tiene que $B_{r}(x,y)$ siempre interseca a $A^{c}$. Por lo tanto, $int(A)=\emptyset$.$~~\blacksquare$
Afirmación: $Fr(A)=\left[0,1\right]\times\left[0,1\right]$
Demostración. Primero mostraremos que $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$. Sea $(x,y)\in\left[0,1\right]\times\left[0,1\right]$ y $r>0$. Ya probamos que $B_{r}(x’,y’)\cap A^{c}\neq\emptyset$, falta probar que $B_{r}(x,y)\cap A\neq\emptyset$. (Para que se cumpla la definición de frontera). Tenemos varios casos para $x$ y $y$:
$(1)$ Supongamos que $0\leq x<1$ y $0\leq y<1$. Por la densidad de los números racionales, sabemos que existen $x’,y’\in\mathbb{Q}$ tal que:
\[
x<x'<min\left\{1,x+\frac{r}{\sqrt{2}}\right\},\text{y }y<y'<min\left\{1,y+\frac{r}{\sqrt{2}}\right\}…………………\clubsuit
\]
Entonces, $\underset{\spadesuit}{\underbrace{(x’,y’)\in A}}$ y además $\displaystyle{|x-x’|<\frac{r}{\sqrt{2}}}$ y $\displaystyle{|y-y’|<\frac{r}{\sqrt{2}}}$. Así podemos ver lo siguiente:
\[
||(x,y)-(x’,y’)||=\sqrt{(x-x’)+(y-y’)}<\sqrt{\left(\frac{r}{\sqrt{2}}\right)^{2}+\left(\frac{r}{\sqrt{2}}\right)^{2}}=r,
\]
lo que nos dice que el punto $(x’,y’)\in B_{r}(x,y)$, y por $\spadesuit$ tenemos que $B_{r}(x,y)\cap A\neq\emptyset$.
$(2)$ En este caso juntaremos los casos que faltan. Escogiendo a $x’,y’$ como en $\clubsuit$, tenemos lo siguiente:
(a) Si $x=1$ y $y<1$ nos fijamos en la pareja $(1,y’)$,
(b) Si $x<1$ y $y=1$ nos fijamos en la pareja $(x’,1)$, y
(c) Si $x=1$ y $y=1$nos fijamos en la pareja $(1,1)$.
Podemos observar que estos puntos están en $A$, pues sus entradas pertenecen a los racionales. Por lo tanto, $B_{r}(x,y)\cap A\neq\emptyset$. Por lo tanto, $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$.
Afirmación: $ext(A)=\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]$
Demostración. Primero mostremos que $\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}\subset ext(A)$. Sea $(x,y)\in\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$
y supongamos que $x<0$ ó $1<x$, (la otra posibilidad es que $y<0$ ó $y>1$, pero se hace de manera análoga).
(1) Si $x<0$, entonces tomamos $r=|x|>0$. Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$. Observemos que $\mathbb{R}^{2}\{\left[0,1\right]\times\left[0,1\right]\}\subset A^{c}…………..\spadesuit$.
Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que
\[
|x-x|\leq\left\Vert (x,y)-(x’,y’)\right\Vert <r
\]
pero $|x|=r$, entonces
\[
|x-x’|<|x|=-x\text{ pues }x<0
\]
entonces
\[
x<x-x'<-x\Longrightarrow-x+x<-x+x-x'<-x-x\Longrightarrow0<-x'<-2x
\]
multiplicando por $(-1)$, tenemos que $x'<0$, lo cual implica que
$(x’,y’)\notin\left[0,1\right]\times\left[0,1\right]$. Así tenemos que $(x’,y’)\in\mathbb{R}^{n}-\left[0,1\right]\times\left[0,1\right]$.
Entonces, $B_{r}(x,y)\subset\mathbb{R}^{n}-\left[0,1\right]\times\left[0,1\right]$.
Por lo tanto, por $\spadesuit$, $B_{r}(x,y)\subset A^{c}$, lo cual implica que $(x,y)\in ext(A)$.
(2) Si $x>1$, entonces tomamos $r=x-1>0$.
Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$. Observemos que $\mathbb{R}^{2}\{\left[0,1\right]\times\left[0,1\right]\}\subset A^{c}…………..\spadesuit$.
Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que
Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}{{}^2}-\left[0,1\right]\times\left[0,1\right]$.
Observemos que $\mathbb{R}{{}^2}\left[0,1\right]\times\left[0,1\right]\subset A^{c}…………..\spadesuit$.\
Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que
\[
|x-x’|\leq\left\Vert (x,y)-(x’,y’)\right\Vert <r=x-1
\]
\[
|x-x’|<x-1\Longrightarrow1-x<x-x'<x-1\Longrightarrow1-2x<x-x-x'<x-x-1
\]
\[
1-2x<-x'<-1\Longrightarrow1<x'<2x-1
\]
entonces tenemos que $x’>1$, lo cual nos dice que $(x’,y’)\notin\left[0,1\right]\times\left[0,1\right]$.
Así tenemos que $(x’,y’)\in\mathbb{R}^{n}-\{\left[0,1\right]\times\left[0,1\right]\}$.
Entonces, $B_{r}(x,y)\subset\mathbb{R}^{n}-\{\left[0,1\right]\times\left[0,1\right]\}$.
Por lo tanto, por $\spadesuit$, $B_{r}(x,y)\subset A^{c}$, lo cual
implica que $(x,y)\in ext(A)$. Por lo tanto, $\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}\subset ext(A)$.
De la proposición tenemos que $\mathbb{R}^{n}=int(A)\cup ext(A)\cup Fr(A)$,
en nuestro caso obtuvimos que $int(A)=\emptyset$. Entonces,
\[
\mathbb{R}{{}^2}=ext(A)\cup Fr(A)
\]
y de esto obtenemos las siguientes igualdades
\[
\mathbb{R}{{}^2}-ext(A)=Fr(A)………\clubsuit\text{ y }\mathbb{R}{{}^2}-Fr(A)=ext(A)………\clubsuit\clubsuit.
\]
De $\clubsuit$ tenemos $Fr(A)\subset\mathbb{R}{{}^2}-ext(A)$ y de $(2)$ tenemos $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$, entonces $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)\subset\mathbb{R}{{}^2}-ext(A)………….\maltese$
De $(3)$ tenemos $\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]\subset ext(A)$,
entonces
\[
\left(\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]\right)\cup\left[0,1\right]\times\left[0,1\right]\subset ext(A)\cup\left[0,1\right]\times\left[0,1\right]
\]
entonces
\[
\mathbb{R}^{2}\subset ext(A)\cup\left[0,1\right]\times\left[0,1\right]\Longrightarrow\mathbb{R}^{2}-ext(A)\subset\left(ext(A)\cup\left[0,1\right]\times\left[0,1\right]\right)-ext(A)
\]
así tenemos
\[
\mathbb{R}^{2}-ext(A)\subset\left[0,1\right]\times\left[0,1\right]…………..\maltese\maltese
\]
Entonces, por $\maltese$ y $\maltese\maltese$ tenemos que $Fr(A)=\left[0,1\right]\times\left[0,1\right]$. Y de esta igualdad y de $\clubsuit\clubsuit$ tenemos que $ext(A)=\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]$.$~~\blacksquare$
Proposición:
Si $A\subset\mathbb{R}^{n}$, entonces:
(1) $int(A)\subset A$
(2) $ext(A)\subset A^{c}$
(3) (a) $int(A)\cap ext(A)=\emptyset$, (b) $int(A)\cap Fr(A)=\emptyset$ y (c) $Fr(A)\cap ext(A)=\emptyset$
(4) $\mathbb{R}^{n}=int(A)\cup ext(A)\cup Fr(A)$
(5) $int(A^{c})=ext(A)$ y $Fr(A)=Fr(A^{c})$.
Demostración.
(1) Por demostrar que $int(A)\subset A$. Sea $\hat{x}\in int(A)$ $\Longrightarrow$ por definición que existe $r>0$ tal que $B_{r}(\hat{x})\subset A$. Como $\hat{x}\in B_{r}(\hat{x})$ (por definición de bola), entonces $\hat{x}\in A$. Por lo tanto, $int(A)\subset A$.
(2) Por demostrar que $ext(A)\subset A^{c}$. Sea $\hat{x}\in ext(A)$ $\Longrightarrow$ por definición que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$. Como $\hat{x}\in B_{r}(\hat{x})$ (por definición de bola), entonces $\hat{x}\in A^{c}$. Por lo tanto, $ext(A)\subset A$.
3_aPor demostrar que $int(A)\cap ext(A)=\emptyset$. Supongamos por contadicción que $int(A)\cap ext(A)\neq\emptyset$, esto implica que existe $\hat{x}\in int(A)\cap ext(A)$ $\Longrightarrow$ $\hat{x}\in int(A)$ y $\hat{x}\in ext(A)$, esto implica por (1) y (2) que $\hat{x}\in A$ y $\hat{x}\in A^{c}$, lo cual es una contradicción. Por lo tanto, $int(A)\cap ext(A)=\emptyset$.
3_b Por demostrar que $int(A)\cap Fr(A)=\emptyset$. Supongamos por contadicción que $int(A)\cap Fr(A)\neq\emptyset$, esto implica que existe $\hat{x}\in int(A)\cap Fr(A)$ $\Longrightarrow$
$\hat{x}\in int(A)$ y $\hat{x}\in Fr(A)$. Así, tenemos lo siguiente: $(a).$ Existe $r>0$ tal que $B_{r}(\hat{x})\subset A$, y $(b).$ Para todo $r’>0$ se tiene que $B_{r’}(\hat{x})\cap A\neq\emptyset$ y $B_{r’}(\hat{x})\cap A^{c}\neq\emptyset$. En particular, por $(a)$, para $r>0$ tenemos que $B_{r}(\hat{x})\cap A^{c}=\emptyset$, lo cual contradice la hipótesis $(b)$. Por lo tanto, $int(A)\cap Fr(A)=\emptyset$.
3_c Por demostrar que $Fr(A)\cap ext(A)=\emptyset$.
Supongamos por contradicción que $Fr(A)\cap ext(A)\neq\emptyset$,
esto implica que existe $\hat{x}\in Fr(A)\cap ext(A)$ $\Longrightarrow$
$\hat{x}\in Fr(A)$ y $\hat{x}\in ext(A)$. Así, tenemos lo siguiente:
$(a).$ Para todo $r>0$ se tiene que $B_{r’}(\hat{x})\cap A\neq\emptyset$
y $B_{r’}(\hat{x})\cap A^{c}\neq\emptyset$, y
$(b).$ Existe $r’>0$ tal que $B_{r’}(\hat{x})\subset A^{c}$.
Así, por $(b)$tenemos que existe $r’>0$ tal que $B_{r’}(\hat{x})\cap A=\emptyset$,
lo cual contradice la hipótesis $(a)$. Por lo tanto, $Fr(A)\cap ext(A)=\emptyset$.
(4) Por demostrar que $\mathbb{R}^{n}=int(A)\cup Fr(A)\cup ext(A)$.
Como $A\subset\mathbb{R}^{n}$, se tiene que $int(A)\cup Fr(A)\cup ext(A)\subset\mathbb{R}^{n}$. Falta ver que $\mathbb{R}^{n}\subset int(A)\cup Fr(A)\cup ext(A)$. Sea $\hat{x}\in\mathbb{R}^{n}$, como $A\subset\mathbb{R}^{n}$entonces tenemos tres casos:
$(a)$ Existe $r>0$ tal que $B_{r}(\hat{x})\subset A$, entonces por
definición tenemos que $\hat{x}\in int(A)$,
$(b)$ existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, entonces por defición tenemos que $\hat{x}\in ext(A)$, o
$(c)$ para todo $r>0$ se tiene que $B_{r}(\hat{x})\cap A^{c}\neq\emptyset$
y $B_{r}(\hat{x})\cap A\neq\emptyset$, entonces por definición $\hat{x}\in Fr(A)$. Así tenemos que, $\mathbb{R}^{n}\subset int(A)\cup Fr(A)\cup ext(A)$. Por lo tanto, $\mathbb{R}^{n}=int(A)\cup Fr(A)\cup ext(A)$.
$(5)$ (a) Por demostrar que $int(A^{c})=ext(A)$.
$\subset\rfloor$ $int(A^{c})\subset ext(A)$ Sea $\hat{x}\in int(A^{c})$, por definición se tiene que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, pero esta es la definición de un punto exterior de $A$. Por lo tanto, $\hat{x}\in ext(A)$. $\supset\rfloor$ $ext(A)\subset int(A^{c})$. Sea $\hat{x}\in ext(A)$, por definición se tiene que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, pero esta es la definición de un punto interior de $A^{c}$. Por lo tanto, $\hat{x}\in int(A^{c})$. Por lo tanto, $int(A^{c})=ext(A)$.$~~\blacksquare$
Definición. Sea $A\subset \mathbb{R}^{n}$. Definimos la cerradura de A, que denotamos por $\overline{A}$, como $$\overline{A}=int(A)\cup Fr(A)$$
Proposición. Sea $A\subset \mathbb{R}^{n}$. Las siguientes afirmaciones son ciertas:
(1) $Int(A)$ es un conjunto abierto
(2) $Ext(A)$ es un conjunto abierto
(3) $Fr(A)$ es un conjunto cerrado
(4) $\overline{A}$ es un conjunto cerrado.
Demostración.
(1) Sea $\overline{x}\in Int(A)$, entonces existe $r>0$ tal que $B(\overline{x},r)\subset A$. Sea $\overline{y}\in B(\overline{x},r)$, existe $r’>0$ tal que $B(\overline{y},r’)\subset B(\overline{x},r)\subset A$ por lo que $\overline{y}\in Int(A)$ y por tanto $B(\overline{x},r)\subset Int(A)$.
(2) Como $Ext(A)=Int(A^{c})$ y de acuerdo al inciso anterior este conjunto es abierto.
(3) Tenemos que $$(Fr(A))^{c}=\mathbb{R}^{n}-Fr(A)=int(A)\cup Ext(A)$$
ambos conjuntos son conjuntos abiertos y la unión de conjuntos abiertos es abierta, entonces este conjunto es abierto y por tanto $Fr(A)$ es cerrado.
(4) Se tiene que
$$(\overline{A}^{c})=\mathbb{R}^{n}-(int(A)\cup Fr(A))=ext(A)$$
el cual es conjunto abierto, por lo tanto $\overline{A}$ es un conjunto cerrado.$~~\blacksquare$
Punto de Acumulación
Definición. Sea $A\subset\mathbb{R}^{n}$ y $\overline{x}\in\mathbb{R}^{n}$. Se dice que
(1) $\overline{x}$ es un punto de acumulación de A, si toda bola abierta con centro en $\overline{x}$ contiene un punto de A distinto de $\overline{x}$ es decir $$\forall r>0, \quad \left(B(\overline{x},r)-{\overline{x}}\right)\cap A\neq \emptyset$$
Al conjunto de puntos de acumulación de A se le denomina el $\textbf{conjunto derivado}$ de A y se le denota $A’$.
(2) $\overline{x}\in A$ es un punto aislado de A si $\overline{x}$ no es un punto de acumulación de A, es decir, si existe $r>0$ tal que
$$(B(\overline{x},r)-{\overline{x}})\cap A=\emptyset.$$
Ejemplo. Sea
$$A=\{(x,y)\in\mathbb{R}^{2}~|~x^{2}+y^{2}<1\}$$
Muestre que $\displaystyle{\overline{x}_{0}=\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)}$ es un punto de acumulación de A.
Solución. Vamos a considerar el punto $\displaystyle{\overline{x}=\left(\frac{1}{\sqrt{2}(r+1)},\frac{1}{\sqrt{2}(r+1)}\right)}$, para $r>0$.
Tenemos entonces que
(1) $\overline{x}\in A$ pues
\begin{align*} \left(\frac{1}{\sqrt{2}(r+1)}\right)^{2}+\left(\frac{1}{\sqrt{2}(r+1)}\right)^{2} & =\frac{1}{2(r+1)^{2}}+\frac{1}{2(r+1)^{2}} \\ & <\frac{1}{2}+\frac{1}{2}=1 \end{align*}
(2) Tenemos que
\begin{align*} \|\overline{x}-\overline{x}_{0}\| & =\left|\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)-\left(\frac{1}{\sqrt{2}(r+1)},\frac{1}{\sqrt{2}(r+1)}\right)\right| \\ & =\left|\left(\frac{1}{\sqrt{2}}-\frac{1}{\sqrt{2}(r+1)},\frac{1}{\sqrt{2}}-\frac{1}{\sqrt{2}(r+1)}\right)\right| \\ &=\left|\frac{r}{\sqrt{2}(r+1)},\frac{r}{\sqrt{2}(r+1)}\right| \\ &=\frac{r}{\sqrt{2}(r+1)}\|(1,1)\| \\ &=\frac{r}{\sqrt{2}(r+1)}\sqrt{2} \\ &=\frac{r}{r+1}<r\end{align*}
Tenemos entonces que $\displaystyle{\overline{x}\in B\left(\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right),r\right)}$. Por lo tanto
$$\left[B\left(\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right),r\right)-\left\{\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)\right\}\right]\bigcap A\neq \emptyset$$
Por lo tanto $\displaystyle{\overline{x}_{0}=\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)}$ es un punto de acumulación de A.$~~\blacksquare$
Más adelante
En la siguiente sección continuaremos estudiando topológicamente los conjuntos importantes obtenidos a partir de la caracterización de puntos de $\mathbb{R}^n$
Tarea Moral
1.- Si $A\subset \mathbb{R^n}$ es un conjunto arbitrario demuestra que $int(A) \subset A´ \subset int(A) \cup Fr(A)$
2.- Sea $A \in \mathbb{R}^n$ prueba que: $A$ no puede ser cerrado y abierto a la vez.
3.- Sea $A \in \mathbb{R}^n$ prueba que: $Fr(A) \neq \phi$
4.-Sean $A$ y $B$ subconjuntos de $\mathbb{R}^n$. Indica y prueba si las siguientes afirmaciónes son ciertas.
a) Si $A \subset B$ entonces $A’ \subset B’$
b) $(A \cup B)’= A’ \cap B’$
c) $(A \cap B)’= A’ \cup B’$
5.- Sea $A$ un subconjunto de $\mathbb{R}^n$ Prueba que: Si $B \subset A$ y $B$ es abierto, entonces $B \subset int(A)$ (es decir, de los conjuntos abiertos que están contenidos en $A$, $int(A)$ es el más «grande»).
Enlaces
 El siguiente enlace muestra un código en python sobre el Conjunto de Cantor.
El siguiente enlace muestra un código en python sobre el Conjunto de Cantor.
Te invitamos a reflexionar sobre la topología del mismo, el cual, se construye de la siguiente manera:
-Empieza con el intervalo [0,1].
-Divide el segmento en tres partes.
-Elimina el tercio central.
-Repite el proceso recursivamente.
-Cada iteración se dibuja más abajo para visualizar el proceso.
https://colab.research.google.com/drive/1kSTC1B7dpZDeVVGBkZQH_s0AW4j-TXBC?usp=sharing