Vamos a finalizar esta serie de entradas referentes al plano fase de sistemas de dos ecuaciones lineales homogéneas con coeficientes constantes de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ estudiando el caso cuando el sistema tiene al menos un cero como valor propio.
En las entradas anteriores revisamos los casos cuando los valores propios son reales distintos y no nulos, son complejos o se repiten, por lo que el caso que revisaremos en esta entrada es el último por estudiar. En todos los casos anteriores el punto de equilibrio es único y se encuentra en el punto $(0,0)$ del plano fase. Sin embargo, cuando el cero es un valor propio de la matriz asociada al sistema resultará que no habrá un único punto equilibrio, sino que tendremos una infinidad de dichos puntos. Es por eso que dejamos este caso al final.
Veremos cómo se distribuyen los puntos de equilibrio en el plano fase. Finalmente las curvas solución serán muy fáciles de dibujar según el análisis que realizaremos de la solución general al sistema, que será de la forma $$\textbf{X}(t)=c_{1}\begin{pmatrix} u_{1} \\ u_{2} \end{pmatrix}+c_{2}e^{\lambda_{2} t}\begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}$$ donde $(u_{1},u_{2})$ es un vector propio asociado al valor propio $\lambda_{1}=0$ y $(v_{1},v_{2})$ es un vector propio asociado al valor propio $\lambda_{2} \neq 0$ (si $\lambda_{2}=0$ la solución general se simplifica aún más y es igualmente sencillo hacer el análisis del plano fase).
Dicho lo anterior, vamos a comenzar.
Plano fase para sistemas con cero como valor propio
En el primer video analizamos el plano fase para un sistema de ecuaciones de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ cuando este tiene a cero como un valor propio asociado.
En el segundo video dibujamos el plano fase de algunos sistemas en particular que tienen al menos un valor propio igual a cero.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Los campos vectoriales de las imágenes fueron realizados en el siguiente enlace.
Encuentra todas las matrices de tamaño $2 \times 2$ diagonalizables cuyo único valor propio es cero.
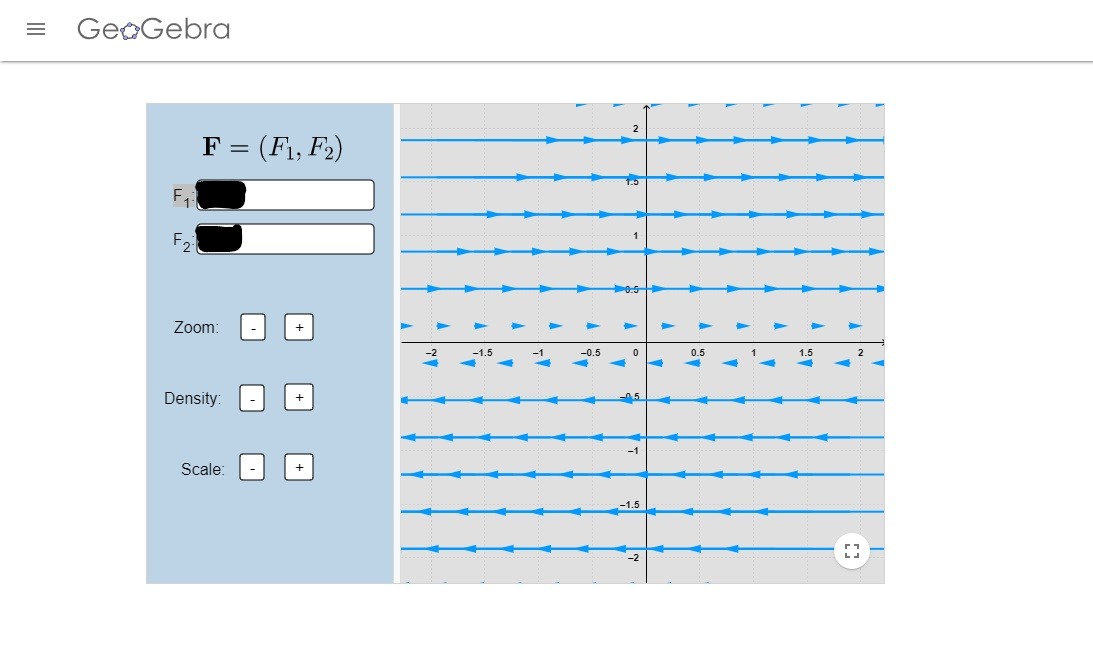
Encuentra todos los sistemas de ecuaciones lineales homogéneos con coeficientes constantes cuyo campo vectorial se ve de la siguiente manera:
Campo vectorial. Elaboración propia.
En el segundo video dibujamos los planos fase de los siguientes sistemas $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} -1 & 1 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}$$ $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 2 \\ 0 & 0 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$ ¿Qué puedes decir acerca de los puntos de equilibrio en cada caso? ¿Son estables, asintóticamente estables, inestables, o ninguno de los tres?
Encuentra la solución general del siguiente sistema y dibuja su plano fase: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 2 \\ 0 & 5 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Resuelve el siguiente sistema y dibuja su plano fase: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 0 & 0 \\ 5 & 0 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Encuentra la solución general y dibuja el plano fase del siguiente sistema: $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 4 & 6 \\ -2 & -3 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Más adelante
Hemos terminado de estudiar el plano fase para sistemas de dos ecuaciones lineales homogéneas con coeficientes constantes. Determinamos el comportamiento de las soluciones en el plano y la estabilidad de los puntos de equilibrio en función de los valores propios del sistema.
Estamos a punto de comenzar a estudiar sistemas no lineales, al menos de manera cualitativa (ya que estos sistemas no los sabemos resolver analíticamente). Pero antes vamos a hacer un resumen de todo el análisis realizado recientemente en un dibujo que clasifica las formas del plano fase según dos características de la matriz asociada al sistema: la traza (que es la suma de los elementos en la diagonal) y su determinante.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En esta entrada veremos un conjunto de circunferencias que surgen de una construcción particular a partir del punto simediano o punto de Lemoine, las circunferencias de Lemoine, y su generalización, las circunferencias de Tucker.
Primera circunferencia de Lemoine
Teorema 1. Si por el punto simediano de un triángulo dado trazamos paralelas a los lados del triángulo, entonces estas tres paralelas intersecan a los lados del triángulo en seis puntos cíclicos, a dicha circunferencia se le conoce como primera circunferencia de Lemoine.
Demostración. En $\triangle ABC$, sean $K$ el punto de Lemoine, $Z’KY \parallel BC$, $X’KZ \parallel CA$, $Y’KX \parallel AB$, $X$, $X’ \in BC$, $Y$, $Y’ \in CA$, $Z$, $Z’ \in AB$.
Dado que $KY’ \parallel AZ$ y $KZ \parallel AY’$, $\square AZKY’$ es paralelogramo, por lo tanto, $AK$ biseca a $ZY’$, de esto se sigue que $ZY’$ es antiparalela a $BC$ respecto a $AB$ y $CA$.
Figura 1
Como $Z’Y \parallel BC$, entonces $Z’Y$ y $ZY’$ son antiparalelas respecto a $AB$ y $CA$, es decir, $\square ZZ’YY’$ es cíclico.
Igualmente podemos ver qué $XZ’$, $CA$ son antiparalelas respecto a $AB$, $BC$ y que $\square Z’XX’Z’$ es cíclico.
Como $Z’Y \parallel BC$ y $\square ZZ’YY’$ es cíclico entonces $\angle Z’ZY’ = \angle A + \angle B$.
Como $XZ’$ y $CA$ son antiparalelas entonces $\angle Z’XB = \angle A$, ya que $AB \parallel XY’$ tenemos que $\angle CXY’ = \angle B$, por lo anterior tenemos que $\angle Y’XZ’ = \angle C$.
Entonces, como los ángulos $\angle Y’XZ’$, $\angle Z’ZY’$ son suplementarios, $\square Z’XY’Z$ es cíclico, por lo tanto, $X$, $Y$, $Y’$, $Z$, $Z’$, están en la misma circunferencia.
Finalmente, como $X’$ esta en el circuncírculo de $\triangle XZZ’$ entonces el hexágono $XY’ZX’YZ’$ es cíclico.
$\blacksquare$
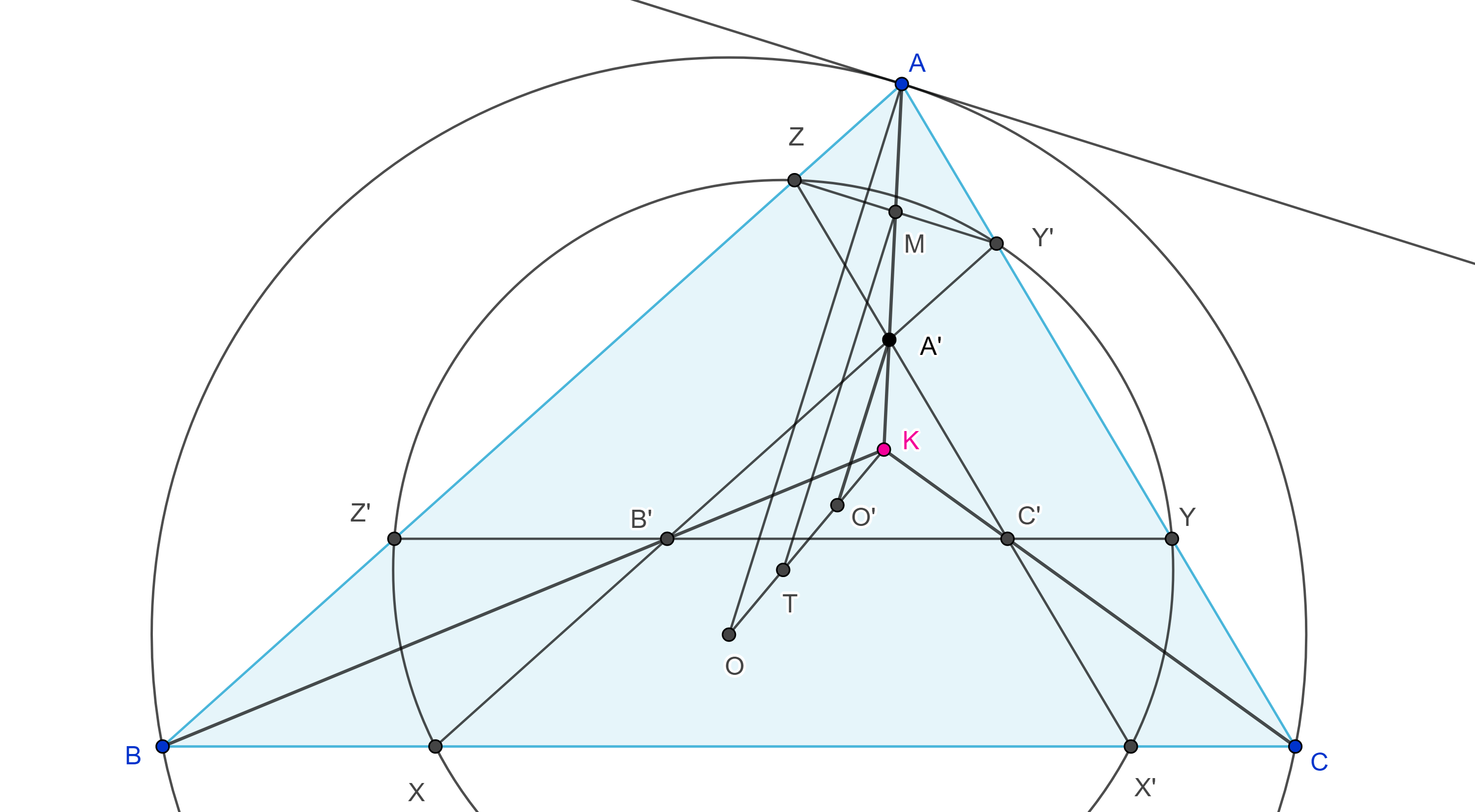
Proposición 1. El centro de la primera circunferencia de Lemoine es el punto medio entre el circuncentro y el punto de Lemoine.
Demostración. En la figura 1, del teorema anterior, sean $O$ el circuncentro de $\triangle ABC$ y $M= AK \cap ZY’$, considera $L$ el punto medio de $KO$, con $K$ el punto de Lemoine.
Como $\square AZKY’$ es paralelogramo, entonces $M$ es punto medio de $AK$ y $ZY’$.
En $\triangle AOK$, $LM$ es un segmento medio, por lo tanto, $ML \parallel AO$.
Ya que $ZY’$, $BC$ son antiparalelas respecto a $AB$, $CA$, entonces $ZY’$ es paralela a la tangente al circuncírculo de $\triangle ABC$ por $A$, por lo tanto, $AO \perp ZY’$.
En consecuencia, $ML \perp ZY’$, como $M$ es el punto medio de $ZY’$ entonces $L$ esta en la mediatriz de $ZY’$.
Igualmente vemos que $L$ esta en la mediatriz de $XZ’$, $YX’$, por lo tanto, $L$ es el centro de la primera circunferencia de Lemoine.
$\blacksquare$
Proposición 2. Las cuerdas de la primera circunferencia de Lemoine, contenidas en los lados del triángulo, son proporcionales a los cubos de dichos lados.
Demostración. Sean $D$ y $H_a$ las proyecciones de $K$ y $A$ en $BC$ respectivamente (figura 1), como $Y’X \parallel AB$ y $X’Z \parallel CA$ entonces $\triangle ABC$ y $\triangle KXX’$ son semejantes.
Por lo tanto, $\dfrac{XX’}{BC} = \dfrac{KD}{AH_a} $ $= \dfrac{BC \times 2(\triangle ABC)}{AB^2 + BC^2 + CA^2} \times \dfrac{BC}{2(\triangle ABC)}$.
Donde la segunda igualdad se sigue del corolario 2 de la entrada anterior y de considerar el área de $\triangle ABC$.
De manera similar se ve que $YY’ = \dfrac{CA^3}{AB^ + BC^2 + CA^2}$, $ZZ’ = \dfrac{AB^3}{AB^ + BC^2 + CA^2}$.
$\blacksquare$
Segunda circunferencia de Lemoine
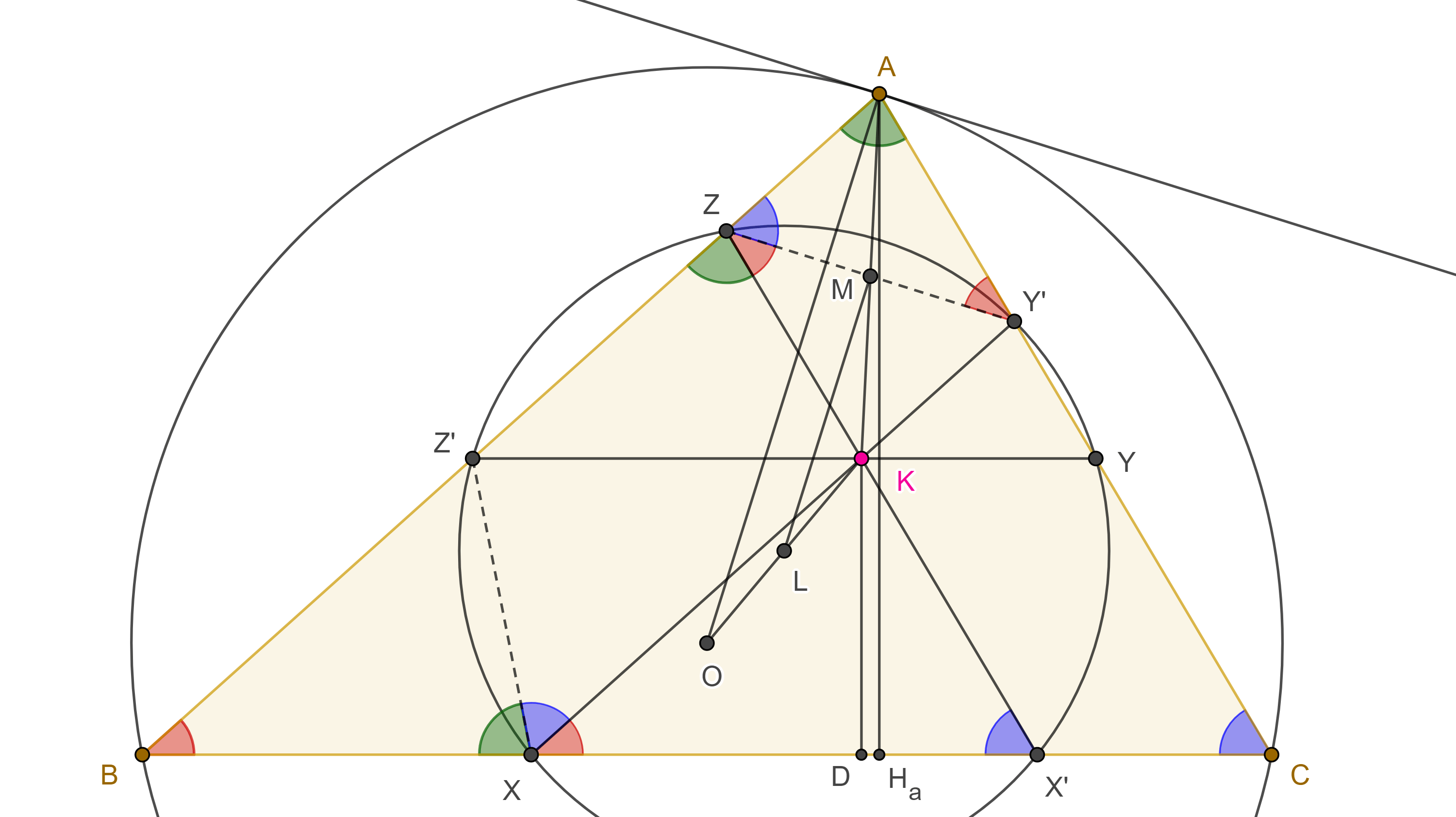
Teorema 2. Si por el punto simediano $K$ de un triángulo trazamos antiparalelas a los lados del triángulo, entonces estas tres antiparalelas intersecan a los lados del triángulo en seis puntos cíclicos con centro en $K$, a dicha circunferencia se le conoce como segunda circunferencia de Lemoine.
Demostración. En $\triangle ABC$ sean $K$ el punto de Lemoine, $Z’KY$ antiparalela a $BC$ respecto a $AB$ y $CA$, $X’KZ$ antiparalela a $CA$ respecto a $AB$ y $BC$, $Y’KX$ antiparalela a $AB$ respecto a $BC$ y $CA$, $X$, $X’ \in BC$, $Y$, $Y’ \in CA$, $Z$, $Z’ \in AB$.
Como $X’Z$ y $CA$ son antiparalelas, entonces $BK$ biseca a $X’Z$, de manera análoga vemos que $CK$ biseca a $Y’X$.
Figura 2
Dado que las antiparalelas $X’Z$ e $Y’X$ se intersecan en la $A$-simediana, entonces son iguales en magnitud.
Como resultado, concluimos que $\square XX’Y’Z$ es un rectángulo, por lo tanto, $X$, $X’$, $Y’$, $Z$, están en una circunferencia con centro en $K$.
Igualmente podemos ver que $AK$ biseca a $YZ’$ y que $XY’ = YZ’ = ZX’$.
Por lo tanto, el hexágono $XY’ZX’YZ’$ es cíclico.
Proposición 4. Las cuerdas de la segunda circunferencia de Lemoine, contenidas en los lados del triángulo son proporcionales a los cosenos de los ángulos opuestos a dichos lados, razón por la cual también es conocida como circunferencia de los cosenos.
Demostración. Dado que $Y’X$ y $AB$ son antiparalelas respecto a $BC$ y $CA$ (figura 2), entonces $\angle X’XY’ = \angle A$.
Como $\triangle Y’X’X$ es un triangulo rectángulo, entonces $\cos \angle A = \cos \angle X’XY’ = \dfrac{XX’}{Y’X}$.
Como $Y’X = X’Z = Z’Y = q$, entonces $XX’ = q \cos \angle A$.
Igualmente podemos ver que $YY’ = q \cos \angle B$ y $ZZ’ = q \cos \angle C$.
$\blacksquare$
Circunferencia de Tucker
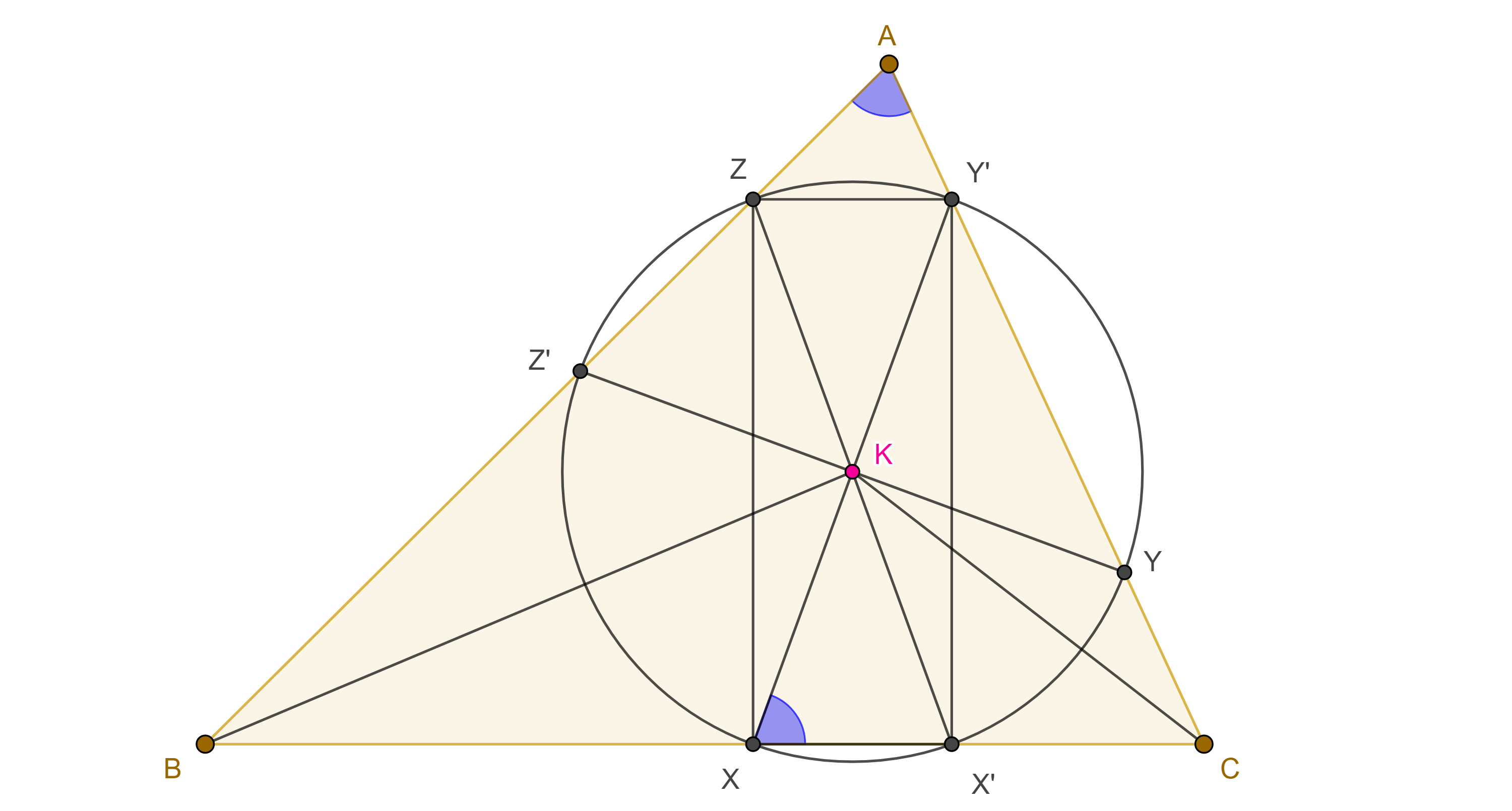
Teorema 3. Si aplicamos una homotecia a un triángulo con centro en su punto de Lemoine entonces los lados del triángulo imagen cortaran a los lados del triángulo original en seis puntos cíclicos, a esta circunferencia se le conoce como circunferencia de Tucker.
Demostración. Sea $K$ el punto de Lemoine de $\triangle ABC$ y $\triangle A’B’C’$ su imagen bajo una homotecia con centro en $K$, entonces los lados correspondientes son paralelos.
Sean $X$, $X’$ las intersecciones de $A’B’$ y $C’A’$ con $BC$, $Y$, $Y’$ las intersecciones de $B’C’$ y $A’B’$ con $CA$, $Z$, $Z’$ las intersecciones de $C’A’$ y $B’C’$ con $AB$.
Figura 3
Como $AZA’Y’$ es un paralelogramo entonces $AK$ biseca $Y’Z$, por lo tanto $Y’Z$ es antiparalela a $BC$ respecto a $AB$, $CA$.
De manera análoga, los pares de rectas $XZ’$, $CA$; $YX’$, $AB$ son antiparalelas.
A partir de aquí la demostración es igual a la del teorema 1.
$\blacksquare$
Proposición 5. El centro de la circunferencia de Tucker se encuentra en la recta que une al punto de Lemoine con el circuncentro del triángulo.
Demostración. Sean $O$ el circuncentro de $\triangle ABC$ y $M$ el punto medio de $Y’Z$ (figura 3), como $\triangle ABC$ y $\triangle A’B’C’$ son homotéticos la paralela por $A’$ a $AO$ interseca a $KO$ en $O’$ el circuncentro de $\triangle A’B’C’$.
Por $M$ trazamos una paralela a $AO$ que interseca a $KO$ en $T$.
Como $A’O’ \parallel MT$ entonces $\dfrac{KA’}{A’M} =\dfrac{KO’}{O’T}$.
Como $AO \parallel MT$ entonces $\dfrac{KM}{MA} =\dfrac{KT}{TO}$.
Por lo tanto, como $M$ también es el punto medio de $AA’$ por ser $\square AZA’Y’$ paralelogramo, tenemos $1 = \dfrac{A’M}{MA} = \dfrac{O’T}{TO}$.
Es decir, $T$ es el punto medio de $OO’$.
Por otra parte $AO \perp Y’Z$, pues $Y’Z$ es paralela a la tangente al circuncírculo de $\triangle ABC$ en $A$, entonces $TM \perp Y’Z$.
Por lo tanto, $T$ esta en la mediatriz de $Y’Z$.
Igualmente vemos que $T$ esta en la mediatriz de $Z’X$, $X’Y$, en consecuencia, $T$ es el centro de la circunferencia de Tucker y está en la recta $KO$.
$\blacksquare$
Circunferencia de Taylor
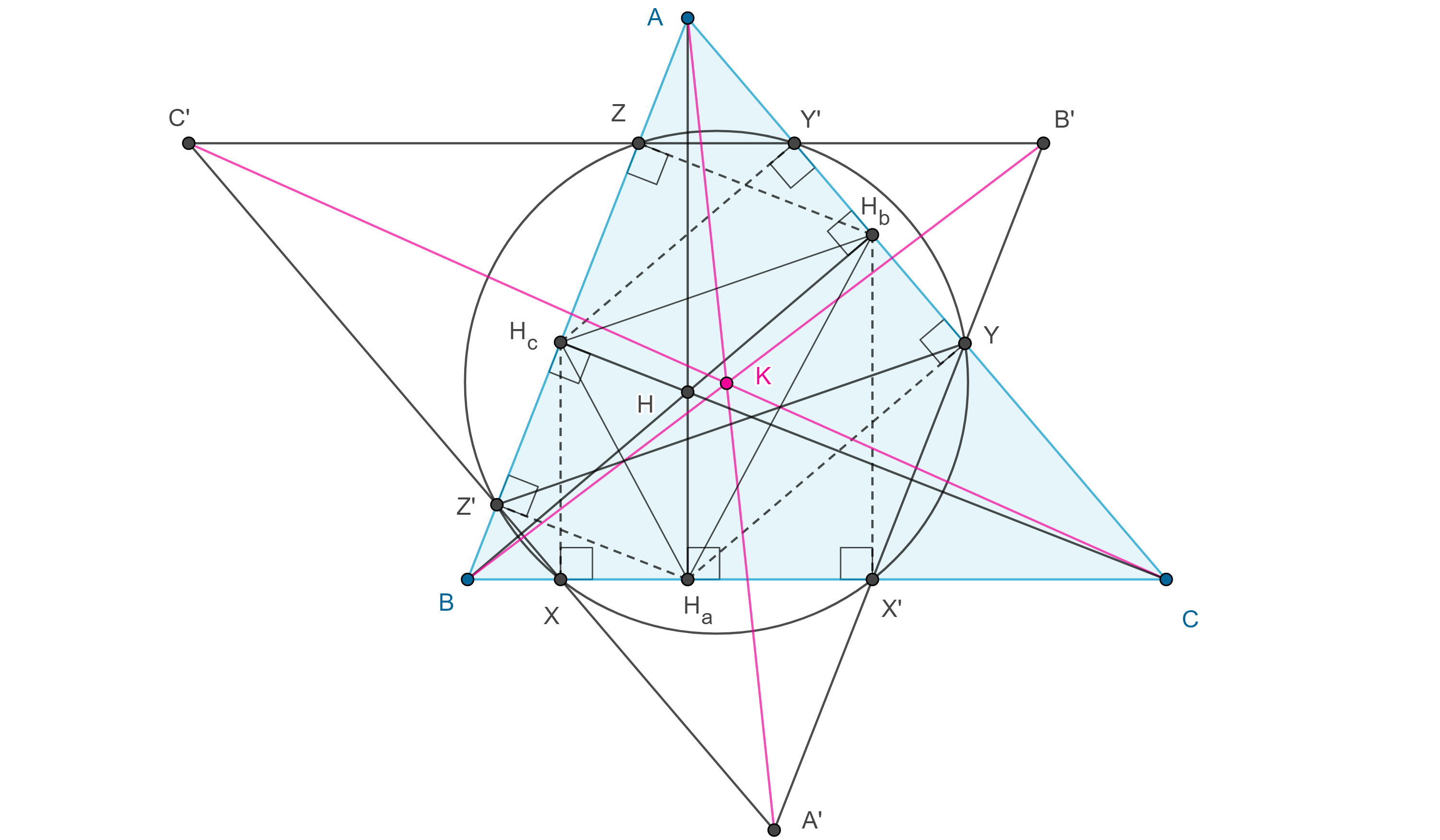
Teorema 4. Dado un triángulo, las proyecciones de los vértices de su triángulo órtico en los lados del triángulo original están en una circunferencia de Tucker, a esta circunferencia se le conoce como circunferencia de Taylor.
Demostración. Sea $\triangle ABC$ y $\triangle H_aH_bH_c$ su triangulo órtico, sean $X$, $X’$ las proyecciones de $H_c$ y $H_b$ en $BC$, $Y$, $Y’$ las proyecciones de $H_a$ y $H_c$ en $CA$, $Z$, $Z’$ las proyecciones de $H_b$ y $H_a$ en $AB$.
Figura 4
$\square H_cBCH_b$ es cíclico pues $\angle BH_cC = \angle BH_bC = \dfrac{\pi}{2}$, así que $\angle H_bH_cZ = \angle C$.
$\angle ZH_cH_bY’$ también es cíclico pues $\angle H_cZH_b = \angle H_cY’H_b = \dfrac{\pi}{2}$, así que $\angle AY’Z = \angle H_bH_cZ = \angle C$.
Por lo tanto, $ZY’ \parallel BC$.
Igualmente vemos que $XZ’ \parallel CA$ y $YX’ \parallel AB$.
En consecuencia, el triángulo $\triangle A’B’C’$ que se forma al extender $ZY’$, $XZ’$, $YX’$, es inversamente homotético con $\triangle ABC$.
Sea $H$ el ortocentro de $\triangle ABC$, como $HH_c \parallel H_aZ’$ y $HH_b \parallel H_aY$, entonces $\dfrac{HH_c}{H_aZ’} = \dfrac{AH}{AH_A} = \dfrac{HH_b}{H_aY}$.
Por criterio de semejanza LAL, $\triangle HH_cH_b \sim \triangle H_aZ’Y$, por lo tanto, $Z’Y \parallel H_cH_b$.
De esto último y tomando en cuenta que $\square H_cBCH_b$ es cíclico, se sigue que $\square Z’BCY$ es cíclico, es decir $Z’Y$ y $BC$ son antiparalelas respecto de $AB$, $CA$.
Por otra parte, $\square AZ’A’Y$ es paralelogramo, así que $AA’$ biseca a $Z’Y$.
Esto implica que $AA’$ es la $A$-simediana de $\triangle ABC$.
De manera análoga vemos que $BB’$ y $CC’$ son simedianas, por lo tanto, $AA’$, $BB’$, $CC’$ concurren en el punto simediano $K$ de $\triangle ABC$.
Por el teorema anterior, se sigue que $X$, $X’$, $Y$, $Y’$, $Z$, $Z’$, están en una circunferencia de Tucker.
$\blacksquare$
Más adelante…
En la siguiente entrada estudiaremos propiedades mas generales de rectas que como la mediana y la simediana, son reflexión respecto de la bisectriz de un ángulo.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
En la figura 1, muestra que: $i)$ $X’Y = Y’Z = Z’X$, $ii)$ el incírculo del triángulo que se forma al extender $X’Y$, $Y’Z$ y $Z’X$, es concéntrico con la primer circunferencia de Lemoine de $\triangle ABC$.
Muestra que si tres diámetros de una circunferencia tienen sus extremos en los lados de un triángulo, entonces dicha circunferencia es la segunda circunferencia de Lemoine del triángulo y su centro es el punto de Lemoine.
Muestra que el circuncírculo de un triángulo, la primera y la segunda circunferencias de Lemoine, son circunferencias de Tucker y encuentra la razón de homotecia con centro en el punto de Lemoine, que da origen a cada una.
Demuestra que el centro de la circunferencia de Taylor de un triángulo es el punto de Spieker de su triángulo órtico. En la figura 4, el incentro del triángulo medial de $\triangle H_aH_bH_c$.
En la figura 4 demuestra que: $i)$ el punto de Lemoine de $\triangle ABC$ coincide con el punto de Gergonne del triángulo medial de su triángulo órtico, $\triangle H_aH_bH_c$, $ii)$ el punto de Nagel del triángulo órtico $\triangle H_aH_bH_c$ es colineal con el ortocentro y el circuncentro de $\triangle A’B’C’$, $iii)$ las bisectrices internas del triángulo medial de $\triangle H_aH_bH_c$, son perpendiculares a los lados de $\triangle ABC$.
Altshiller, N., College Geometry. New York: Dover, 2007, pp 257-260, 284-287.
Honsberger, R., Episodes in Nineteenth and Twentieth Century Euclidean Geometry. Washington: The Mathematical Association of America, 1995, pp 87-98.
Johnson, R., Advanced Euclidean Geometry. New York: Dover, 2007, pp 271-277.
Shively, L., Introducción a la Geómetra Moderna. México: Ed. Continental, 1961, pp 76-79.
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
El estudio profundo de la naturaleza es la fuente más fértil de descubrimientos matemáticos. – Fourier
Introducción
Nos estamos acercando al final de la unidad 3 del curso.
En esta unidad estudiamos los sistemas lineales de primer orden con coeficientes constantes tanto homogéneos como no homogéneos, es por ello que en esta entrada demostraremos los teoremas de existencia y unicidad para estos sistemas lineales en particular.
Es interesante la enorme utilidad que tiene definir la exponencial de una matriz, este concepto nos ha permitido desarrollar distintos métodos de resolución y no solo ello, ahora nos permitirá demostrar estos teoremas de existencia y unicidad.
Comencemos con el caso homogéneo.
Teorema de existencia y unicidad para sistemas lineales homogéneos
Recordemos que estamos estudiando sistemas lineales homogéneo con coeficientes constantes, es decir, la matriz $\mathbf{A}$ es de la forma
con $a_{ij}$, $i, j \in \{ 1, 2, 3, \cdots, n \}$ constantes.
Teorema: Sea el problema con valores iniciales $$\mathbf{Y}^{\prime} = \mathbf{AY}; \hspace{1cm} \mathbf{Y}(t_{0}) = \mathbf{Y}_{0} \label{2} \tag{2}$$ Con $t_{0} \in \mathbb{R}$, entonces existe una única solución a este problema y está dada por $$\mathbf{Y}(t) = e^{(t -t_{0}) \mathbf{A}} \mathbf{Y}_{0} \label{3} \tag{3}$$
Demostración: Recordemos que ya demostramos que la función (\ref{3}) es solución del sistema homogéneo para el caso $t_{0} = 0$, lo mismo podemos hacer para cualquier $t_{0}$, con ello estaremos mostrando la existencia. Consideremos la función (\ref{3}).
Con esto queda demostrado que la función $\mathbf{Y}(t) = e^{(t -t_{0})\mathbf{A}} \mathbf{Y}_{0}$ es solución del problema con valores iniciales, es decir, existe.
Para demostrar la unicidad supongamos que $\mathbf{X}(t)$ es otra solución del problema de valores iniciales. Consideremos una función derivable dada de la siguiente forma.
El calculo anterior muestra que $\mathbf{Z}^{\prime}(t) = \mathbf{0}$, esto implica que $\mathbf{Z}(t)$ es una matriz constante. Evaluemos $t_{0}$ en (\ref{4}).
Con este teorema queda justificado el método de valores y vectores propios que presentamos en esta unidad para resolver sistemas lineales homogéneos con coeficientes constantes.
Ahora demostremos el teorema de existencia y unicidad para el caso no homogéneo.
Teorema de existencia y unicidad para sistemas lineales no homogéneos
Teorema: Sea el problema de valores iniciales $$\mathbf{Y}^{\prime} = \mathbf{AY} + \mathbf{G}; \hspace{1cm} \mathbf{Y}(t_{0}) = \mathbf{Y}_{0} \label{14} \tag{14}$$ Con $t_{0} \in \mathbb{R}$, entonces existe una única solución a este problema y esta dada por $$\mathbf{Y}(t) = e^{(t -t_{0}) \mathbf{A}} \mathbf{Y}_{0} + e^{t \mathbf{A}} \int_{t_{0}}^{t} e^{-s \mathbf{A}} G(s) ds \label{15} \tag{15}$$
Demostración: Sea $\mathbf{Y}(t)$ una función arbitraría definida en un intervalo común $\delta$ que es solución del problema de valores iniciales (\ref{14}), entonces
Como la función $\mathbf{Y}(t)$ fue arbitraría, con el proceso realizado estamos mostrando tanto la existencia como la unicidad de esta solución.
$\square$
Con este teorema queda justificado el método de variación de parámetros visto en la entada anterior.
Hemos concluido con esta entrada.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Resolver los siguientes problemas con valores iniciales.
En la siguiente y última entrada de esta unidad justificaremos el teorema de existencia y unicidad de los sistemas de ecuaciones diferenciales de primer orden lineales y no lineales. Es decir, el resultado general de los sistemas de ecuaciones diferenciales.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
El punto simediano es el punto en el que concurren las simedianas de un triángulo, es otro punto notable del triángulo, en esta entrada veremos algunas de sus propiedades.
Punto simediano
Teorema 1. Las tres simedianas de un triángulo son concurrentes, al punto de concurrencia se le conoce como punto simediano o punto de Lemoine a menudo denotado con la letra $K$.
Demostración. En la entrada teorema de Menelao mostramos que un triángulo $\triangle ABC$ y su triangulo tangencial $\triangle K_aK_bK_c$, están en perspectiva desde una recta, conocida como eje de Lemoine.
Por el teorema de Desargues, $\triangle ABC$ y $\triangle K_aK_bK_c$ están en perspectiva desde un punto, es decir, $AK_a$, $BK_b$ y $CK_c$ concurren en un punto $K$.
Figura 1
Por el teorema 2de la entrada anterior, dos exsimedianas (los lados del triángulo tangencial $\triangle K_aK_bK_c$) y una simediana, que pasan por vértices distintos de $\triangle ABC$ concurren en un punto exsimediano, es decir, $AK_a$, $BK_b$, $CK_c$ son las simedianas de $\triangle ABC$.
$\blacksquare$
Observación. Como el eje de Lemoine de $\triangle ABC$ es el eje de Gergonne de $\triangle K_aK_bK_c$, entonces el punto de Lemoine de $\triangle ABC$ es el punto de Gergonne de $\triangle K_aK_bK_c$, su triángulo tangencial.
Corolario 1. Sea $S = AK \cap BC$ entonces $AKSK_a$ es una hilera armónica de puntos.
Demostración. Por el corolario de la entrada anterior $B(AK_bCK_a)$ es un haz armónico de rectas y como $AD$ es transversal entonces sus intersecciones con el haz forman una hilera armónica.
$\blacksquare$
Triángulo pedal del punto simediano
Definición. Dados un triángulo $\triangle ABC$ y un punto $P$, el triángulo pedal de $P$ respecto de $\triangle ABC$, es aquel cuyos vértices son las proyecciones de $P$ en los lados de $\triangle ABC$. Por ejemplo, el triángulo órtico es el triángulo pedal del ortocentro.
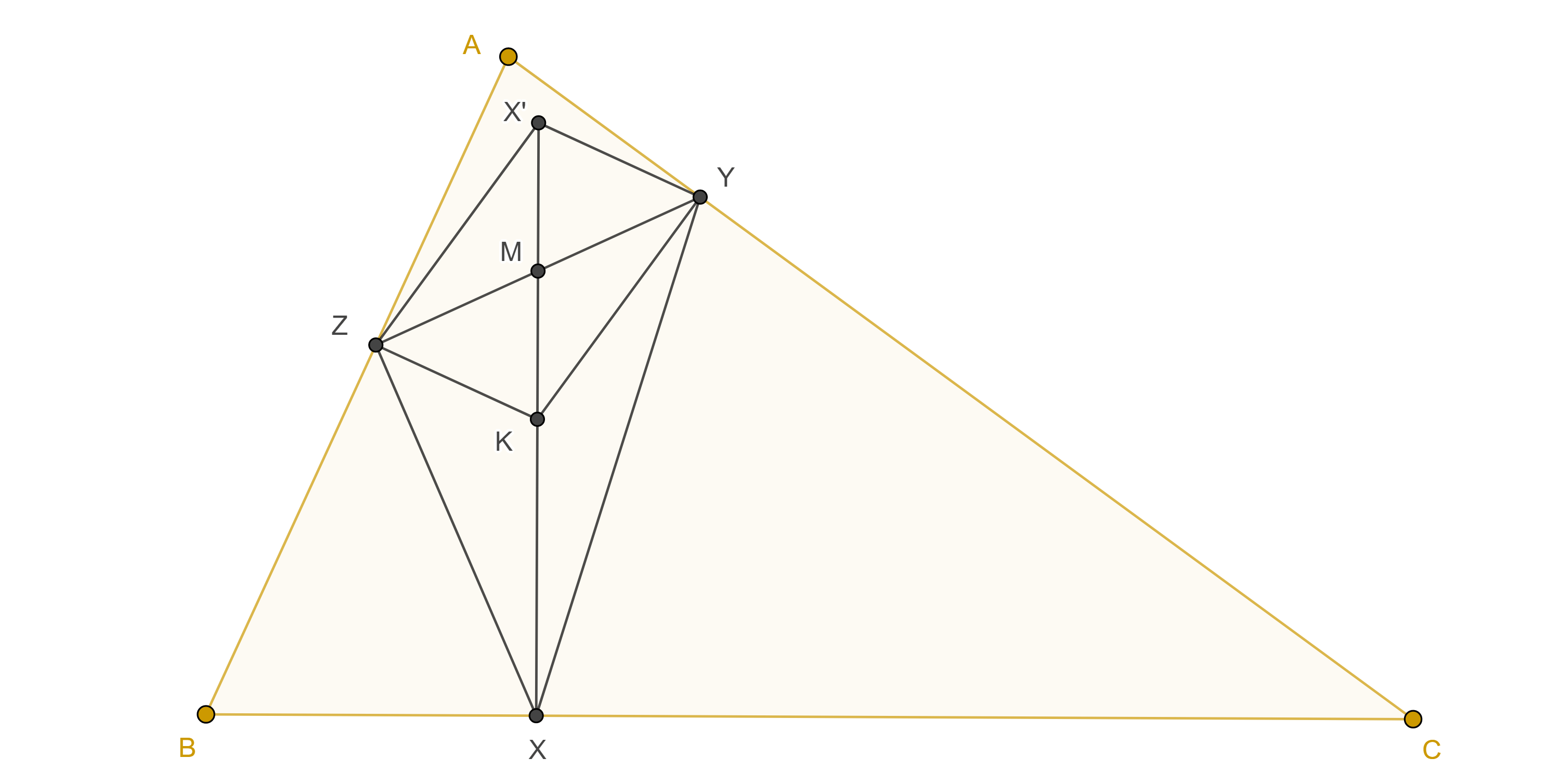
Teorema 2, de Lemoine. El punto simediano es el único punto del plano que es el centroide de su propio triángulo pedal.
Demostración. Sean $\triangle ABC$ y $K$ su punto simediano, considera $X$, $Y$ y $Z$ las proyecciones de $K$ en $BC$, $CA$ y $AB$ respectivamente, sea $X’ \in KX$ tal que $YX’ \parallel KZ$.
Pero $\dfrac{AB}{AC} = \dfrac{KZ}{KY}$ pues $K$ esta en la $A$-simediana, por lo tanto $KZ = YX’$.
En consecuencia, $\square X’ZKY$ es un paralelogramo y por lo tanto $KX’$ biseca a $YZ$.
Como resultado tenemos que $XK$ es mediana de $\triangle XYZ$.
De manera análoga vemos que $YK$, $ZK$ son medianas de $\triangle XYZ$, por lo tanto, $K$ es el centroide de su triangulo pedal.
$\blacksquare$
Recíprocamente, supongamos que $K$ es el centroide de su triángulo pedal $\triangle XYZ$ respecto a $\triangle ABC$, con $X \in BC$, $Y \in CA$, $Z \in AB$, sea $M$ el punto medio de $YZ$, extendemos $KM$ hasta un punto $X’$ tal que $KM = MX’$.
Como $YZ$ y $KX’$ se bisecan entonces $\square X’ZKY$ es un paralelogramo, entonces $YX’ = KZ$ y $YX’ \parallel KZ$.
Ya que los lados de $\triangle YX’K$ son perpendiculares a los lados de $\triangle ABC$, entonces son semejantes, esto es $\dfrac{AB}{AC} = \dfrac{YX’}{YK} = \dfrac{KZ}{KY}$.
Por lo tanto, $K$ está en la $A$-simediana, igualmente vemos que $K$ pertenece a las $B$ y $C$-simedianas.
En consecuencia, $K$ es el punto simediano de $\triangle ABC$.
$\blacksquare$
Conjugado isotómico del punto simediano
Teorema 3. Las rectas que unen el punto medio del lado de un triángulo con el punto medio de la altura perpendicular a ese lado concurren en el punto simediano del triángulo.
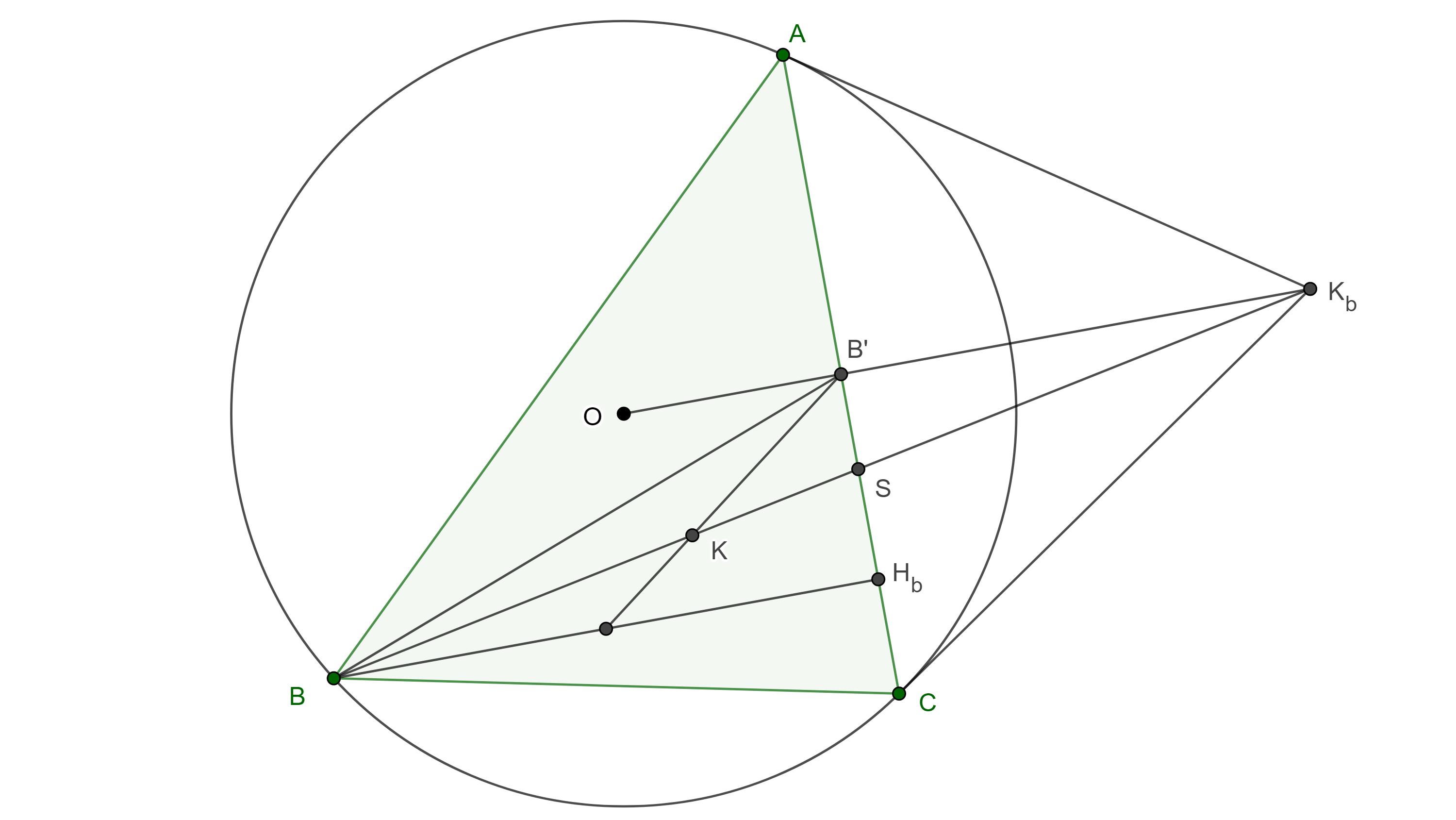
Demostración. Sean $\triangle ABC$, $K$ el punto simediano, $K_b$ el punto exsimediano opuesto al vértice $B$, $S = BK_b \cap CA$.
Figura 3
Por el corolario 1, $BKSK_b$ es una hilera armónica, por lo tanto, $B’(BKSK_b)$ es un haz armónico, donde $B’$ es el punto medio de $CA$.
Considera $O$ el circuncentro de $\triangle ABC$ y $H_b$ el pie de la altura por $B$, notemos que $O$, $B’$ y $K_b$ son colineales, por lo tanto, $B’K_b$ es perpendicular a $CA$ y así $BH_b \parallel B’K_b$.
Como $BH_b$ es paralela a una de las rectas del haz armónico, entonces las otras tres rectas del haz dividen a $BH_b$ en dos segmentos iguales, es decir $B’K$ biseca a $BH_b$.
Igualmente vemos que $A’K$ y $C’K$ bisecan a $AH_a$ y $CH_c$ respectivamente, y de esto concluimos la concurrencia de las rectas mencionadas.
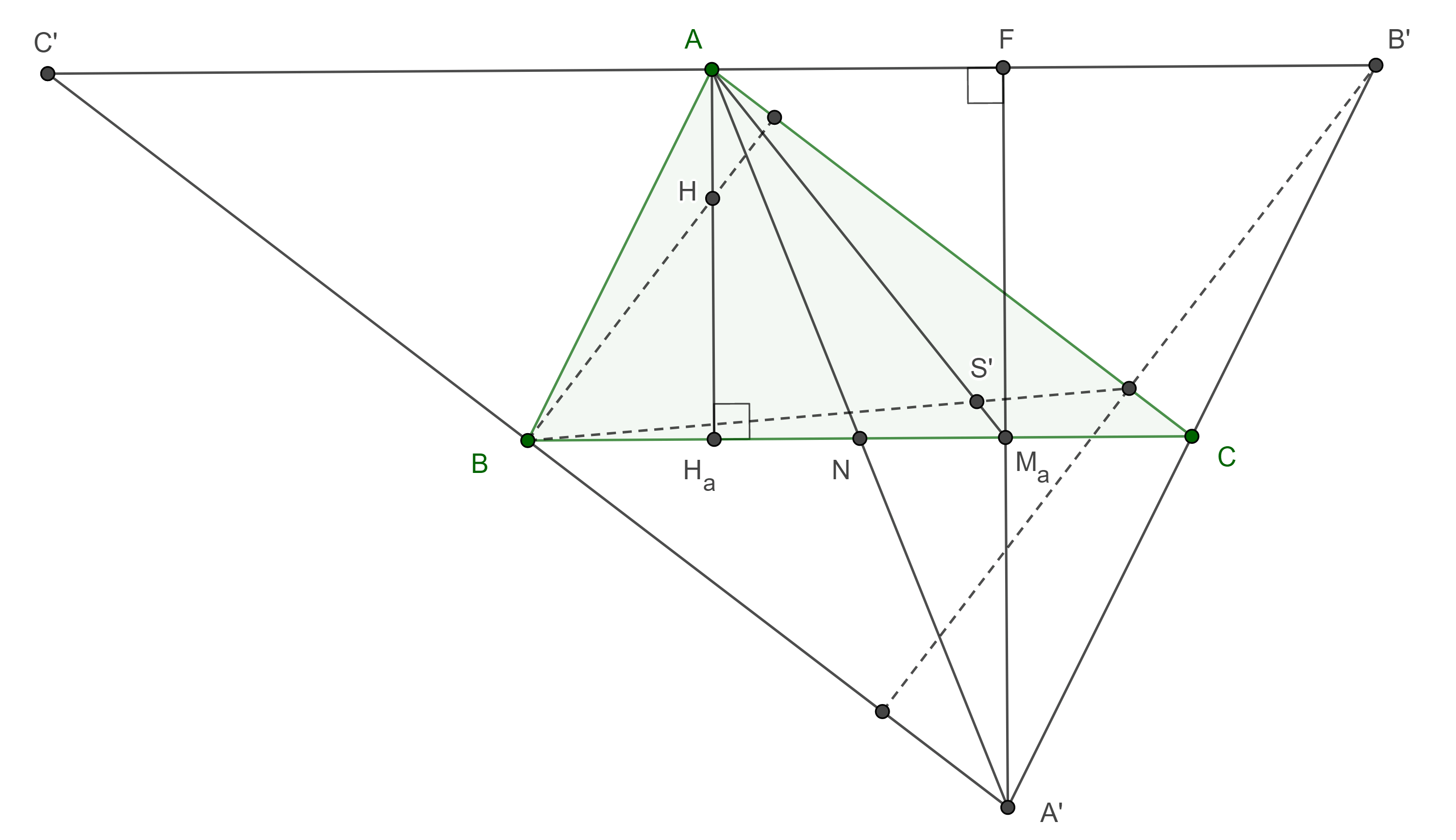
Demostración. Sean $\triangle ABC$ y $\triangle A’B’C’$ su triángulo anticomplementario.
Como $AB$ y $AC$ son segmentos medios de $\triangle A’B’C’$, entonces $\square ABA’C$ es un paralelogramo, por lo tanto, $\triangle ABC$ y $\triangle A’CB$ son congruentes, además $AA’$ y $BC$ se intersecan en su punto medio $N$.
Figura 4
Sean $H_a$, $M_a$ los pies de las alturas desde $A$ y $A’$ respectivamente en $BC$, como $\triangle ABC \cong \triangle A’CB$, entonces $AH_a = M_aA’$.
Por criterio de congruencia ALA, $\triangle AH_aN \cong \triangle A’M_aN$, por lo que $H_aN = NM_a$, es decir, el punto medio de $H_a$ y $M_a$ coincide con el punto medio de $BC$,
Por lo tanto, $H_a$ y $M_a$ son puntos isotómicos respecto de $\triangle ABC$.
Sea $F$ el pie de la altura por $A’$ en $\triangle A’B’C’$, como $\square AH_aM_aF$ es un rectángulo entonces $M_aA’ = AH_a = FM_a$, y así $M_a$ es el punto medio de la altura $A’F$.
Por lo tanto, el segmento $AM_a$ une los puntos medios de un lado y una altura de $\triangle A’B’C’$.
De manera análoga vemos que los pies de las alturas en $\triangle ABC$, $H_b$, $H_c$ son isotómicos a los puntos medios de las alturas en $\triangle A’B’C’$, $M_b$, $M_c$, respectivamente.
Como las alturas de $\triangle ABC$ concurren en el ortocentro $H$ y, por el teorema 3, los segmentos $AM_a$, $BM_b$, $CM_c$ concurren en el punto simediano $S’$ de $\triangle A’B’C’$, entonces estos puntos son conjugados isotómicos respecto de $\triangle ABC$.
$\blacksquare$
Construcción de un triángulo dado su punto simediano
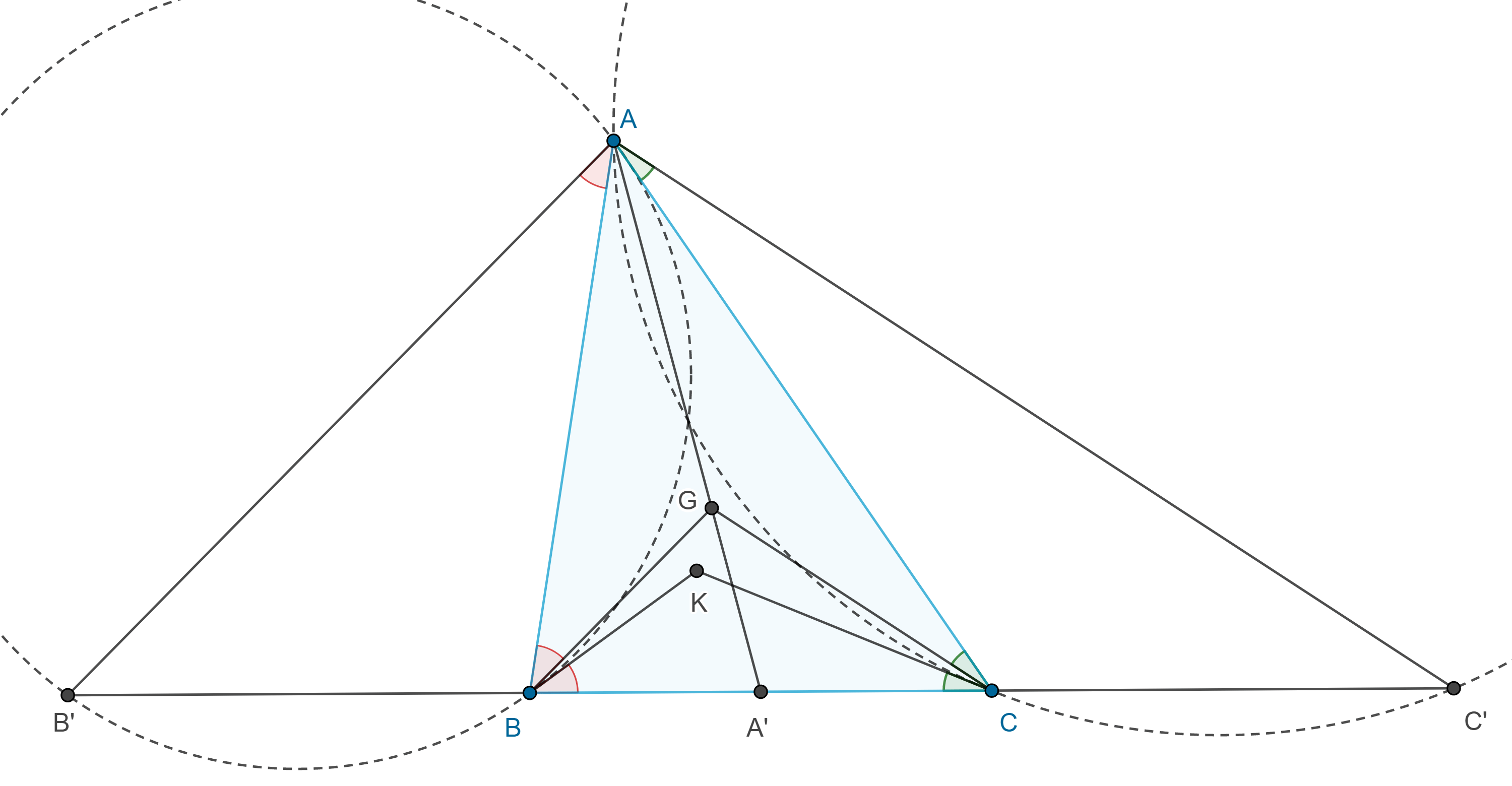
Problema. Construye un triángulo dados dos vértices $B$, $C$, y su punto simediano $K$.
Solución. Supongamos que $\triangle ABC$ es el triángulo requerido y consideremos $G$ y $A’$ el centroide y el punto medio de $BC$ respectivamente.
Sean $B’$, $C’ \in BC$, tales que $B’A \parallel BG$ y $AC’ \parallel GC$.
Figura 5
Por el teorema de Tales tenemos $\dfrac{1}{2} = \dfrac{A’G}{GA} = \dfrac{A’B}{BB’} = \dfrac{A’C}{CC’}$.
Por lo tanto, $BB’ = CC’ = 2A’B = BC$, así que $B’$ y $C’$ pueden ser construidos teniendo $B$ y $C$.
Por otro lado, como $B’A \parallel BG$ y $AC’ \parallel GC$ y tomando en cuenta que $K$ esta en las reflexiones de $BG$ y $CG$ respecto de las bisectrices de $\angle B$ y $\angle C$ respectivamente, tenemos lo siguiente:
$\angle B’AB = \angle GBA = \angle KBC$ y $\angle CAC’ = \angle ACG = \angle KCB$.
Y estos ángulos son conocidos.
Entonces $B’B$ y $CC’$ subtienden ángulos conocidos en $A$, por lo que podemos trazar los arcos de circunferencia que son el lugar geométrico de los puntos que subtienden estos ángulos.
Así que de la intersección de estos dos arcos resultara en el vértice faltante.
Notemos que los arcos pueden tener dos intersecciones, ser tangentes o no intersecarse, por lo tanto, existen dos, una o cero soluciones.
$\blacksquare$
Distancia del punto simediano a los lados del triángulo
Proposición 2. El punto simediano de un triángulo es el único punto dentro del triángulo cuyas distancias a los lados del triángulo son proporcionales a los respectivos lados.
Demostración. Sean $\triangle ABC$ y $K$ su punto simediano, considera $X$, $Y$ y $Z$ las proyecciones de $K$ en $BC$, $CA$ y $AB$ respectivamente, denotemos $BC = a$, $CA = b$, $AB = c$.
Figura 6
Dado que $K$ está en las tres simedianas del triángulo, por el teorema 4 de la entrada anterior, las razones de sus distancias a los lados del triángulo son proporcionales a estos:
Por lo tanto, $KX = aq = a \dfrac{2(ABC)}{a^2 + b^2 + c^2}$.
$\blacksquare$
Teorema 4. La suma de los cuadrados de las distancias de un punto a los lados de un triángulo dado, es mínima si el punto es el punto simediano del triángulo.
Demostración. Sean $a$, $b$, $c$, $x$, $y$, $z$ seis números reales entonces la siguiente igualdad es cierta:
Para comprobarlo solo hace falta realizar los productos.
Podemos pensar estas cantidades como los lados de un triángulo $\triangle ABC$, $BC = a$, $CA = b$, $AB = c$, y $x$, $y$, $z$, las distancias de un punto $K$, a los lados de $\triangle ABC$.
Notemos $ax + by + cz$ representa al menos dos veces el área del triángulo $\triangle ABC$, $2(\triangle ABC)$, que junto con $(a^2 + b^2 + c^2)$ son constantes.
Como las cantidades $(ay – bx)^2$, $(az – cx)^2$, $(bz – cy)^2$ son mayores o iguales a cero, entonces el mínimo se alcanza si se satisfacen las siguientes igualdades: $\begin{equation} (ay – bx)^2 = (az – cx)^2 = (bz – cy)^2 = 0, \end{equation}$ $\begin{equation} ax + by + cz = 2(\triangle ABC). \end{equation}$
Por otra parte, por las ecuaciones $(1)$, $(2)$ y $(3)$ sabemos que el punto simediano cumple $(4)$ y por el corolario 2 cumple $(5)$, también podemos calcular directamente,
Por lo tanto, si $K$ es el punto simediano de $\triangle ABC$, se alcanza el mínimo.
$\blacksquare$
Más adelante…
En la próxima entrada veremos otra propiedad del punto simediano, o punto de Lemoine, que amerita su propia entrada, se trata de un conjunto de circunferencias asociadas a este punto.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Si $K$ es el punto simediano de $\triangle ABC$, sea $X$ la proyección de $K$ en $BC$, muestra que la reflexión de $X$ respecto de $K$ esta en la mediana que pasa por $A$.
Encuentra el punto simediano de un triángulo rectángulo.
Sobre los lados de un triángulo $\triangle ABC$ construye cuadrados externamente, muestra que los lados (de los cuadrados) opuestos a los lados de $\triangle ABC$ se intersecan formando un triángulo homotético a $\triangle ABC$, con centro de homotecia el punto simediano de $\triangle ABC$.
Si las simedianas de $\triangle ABC$ intersecan a su circuncírculo en $D$, $E$ y $F$ muestra que $\triangle ABC$ y $\triangle DEF$ tienen el mismo punto simediano.
$i)$ Muestra que las distancias a los lados de un triángulo desde sus puntos exsimedianos son proporcionales a las longitudes de los lados del triángulo, $ii)$ calcula dichas distancias.
Prueba que de entre todos los triángulos inscritos en un triángulo dado, el triángulo pedal del punto simediano, es el que tiene la propiedad de que la suma de los cuadrados de sus lados es mínima.
Altshiller, N., College Geometry. New York: Dover, 2007, pp 252-257.
Andreescu, T., Korsky, S. y Pohoata, C., Lemmas in Olympiad Geometry. USA: XYZ Press, 2016, pp 129-145.
Johnson, R., Advanced Euclidean Geometry. New York: Dover, 2007, pp 215-218.
Agradecimientos
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»
En las dos entradas anteriores estudiamos el plano fase para un sistema de dos ecuaciones homogéneas con coeficientes constantes de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ cuyos valores propios son reales distintos no nulos o complejos. Analizamos el comportamiento de las soluciones en el plano fase y también la estabilidad del punto de equilibrio. Clasificamos los puntos de equilibrio en repulsores, atractores, puntos silla, centros, repulsores espirales y atractores espirales, según sea el caso.
Continuamos en esta entrada revisando el plano fase para sistemas de ecuaciones del mismo tipo, pero ahora consideraremos el caso cuando dicho sistema tiene valores propios repetidos. Sabemos que existen dos casos: cuando la matriz asociada al sistema es diagonalizable y cuando no lo es.
Si la matriz asociada es diagonalizable veremos que el plano fase tiene una forma muy sencilla. En efecto, como la solución general es de la forma $$\textbf{X}(t)=c_{1}e^{\lambda_{1} t} \begin{pmatrix} 1 \\ 0 \end{pmatrix}+c_{2}e^{\lambda_{2} t} \begin{pmatrix} 0 \\ 1 \end{pmatrix}.$$ Veremos que todo vector en $\mathbb{R}^{2}$ es un vector propio del sistema, y por tanto las soluciones (no triviales) en el plano fase son rayos que salen del origen.
Si la matriz asociada al sistema no es diagonalizable entonces la solución general tiene la forma $$\textbf{X}(t)=c_{1}e^{\lambda t}\begin{pmatrix} u_{1} \\ u_{2} \end{pmatrix}+c_{2}e^{\lambda t}\left(\begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}+t\left(\textbf{A}-\lambda\textbf{Id}\right)\begin{pmatrix} v_{1} \\ v_{2} \end{pmatrix}\right)$$ donde $\lambda$ es el único valor propio del sistema, $(u_{1},u_{2})$ su único vector propio y $(v_{1},v_{2})$ es un vector propio generalizado. En este caso, solo tenemos una solución de línea recta en el plano fase, así que veremos cuál es el comportamiento de las demás soluciones.
Por supuesto, veremos algunos ejemplos para terminar de entender las ideas presentadas.
Plano fase para sistemas con valores propios repetidos
En el primer video estudiamos el plano fase de manera general para sistemas de la forma $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} a & b \\ c & d \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$$ cuando este tiene un único valor propio. Consideramos los casos cuando la matriz asociada al sistema es diagonalizable y cuando no lo es.
En el segundo video dibujamos el plano fase de algunos sistemas de ecuaciones con un único valor propio.
Tarea moral
Los siguientes ejercicios no forman parte de la evaluación del curso, pero te servirán para entender mucho mejor los conceptos vistos en esta entrada, así como temas posteriores.
Sea $\textbf{A}$ una matriz de tamaño $2\times 2$ con entradas reales. Muestra que $\textbf{A}$ es diagonalizable y con único valor propio si y sólo si $\textbf{A}=\begin{pmatrix} \lambda & 0 \\ 0 & \lambda \end{pmatrix}$.
Encuentra la solución general y dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 4 & -4 \\0 & 4 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Resuelve y dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} 3 & -4 \\1 & -1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Resuelve y dibuja el plano fase del sistema $$\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}=\begin{pmatrix} -6 & -5 \\5 & 4 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}.$$
Más adelante
Estamos a punto de finalizar el estudio del plano fase para sistemas de dos ecuaciones con coeficientes constantes. Sin embargo, aún nos falta un caso, que es cuando el sistema tiene un valor propio igual a cero. El plano fase para este tipo de sistemas es peculiar ya que el sistema tiene infinitos puntos de equilibrio. En la siguiente entrada estudiaremos este caso particular.
Trabajo realizado con el apoyo del Programa UNAM-DGAPA-PAPIME PE104522 «Hacia una modalidad a distancia de la Licenciatura en Matemáticas de la FC-UNAM – Etapa 2»