En este material, se ha estado abordando los modelos de interés compuesto, su evolución con las anualidades, las tasas de interés, sus tipos, y combinación de cada una de ellas dependiendo de la forma en que se realicen los pagos, y dependiendo también del tipo de tasa de interés con la que se decida trabajar.
Concepto y descripción
En este apartado, se desarrollará el tipo de amortización con pajos fijos, así como tasas de interés fijas. Las manejaremos con el nombre de amortización de créditos con pagos fijos al capital, y en este rubro encajan las tablas de amortización con anualidades ordinarias vencidas.
Su desarrollo justo, tiene que ver con las herramientas vistas en el tema que lleva el mismo nombre, la cual, suele representar la forma más utilizada para hacer el pago de una deuda, por lo que resulta necesario hacer algunos recordatorios:
La forma general de la ecuación de valor que se va a estar utilizando será:
$$S=X\prescript{}{n}{\mathbf{A}}_i$$
donde para estos fines, $S$ representa el monto de la deuda y que equivale al saldo insoluto al inicio de la operación, mientras que la variable $X$, representa la cantidad que será pagada en cada periodo.
Las filas y columnas serán calculadas de forma análoga al tema anterior.
Para el primer periodo, el saldo insoluto será calculado con la siguiente expresión:
$$\prescript{}{n}{\mathbf{A}}_i=\frac{1-v^n}{i}$$
luego los intereses contenidos en el pago se van a multiplicar por la tasa de interés, esto es:
$$\frac{1-v^n}{i}(i)=1-v^n$$
ahora el capital contenido en el pago se calcula al restar la celda con el nombre de intereses contenidos en el pago, y esto se traduce en:
$$1-(1-v^n)=1-1+v^n=v^n.$$
Por último, la celda con el nombre de saldo insoluto al final del periodo se obtiene al efectuar la resta del saldo al principio del periodo, el capital contenido en el pago, lo cual es:
$$\left(\frac{1-v^n}{i}\right)-v^n.$$
De la expresión que se acaba de obtener, nos fijamos en el factor común, para tener la siguiente ecuación:
$$\frac{1-v^n-iv^n}{i}$$
luego factorizamos a $v^{n-1}$, y la ecuación se transforma en:
$$\frac{1-v^{n-1}(v+iv)}{i}.$$
Recordando que $v=\frac{1}{1+i}$, la expresión que se obtiene es:
la cantidad que se tiene expresada entre paréntesis es igual a uno, entonces la ecuación queda:
$$\frac{1-v^{n-1}}{i}.$$
Recordando que, $\prescript{}{n}{\mathbf{A}}_i=\frac{1-v^n}{i}$ y haciendo mención que todos los cálculos que hasta el momento se han estado realizando, son con un capital de un peso, además se está manejando una anualidad vencida de $n-1$ pagos, entonces se tiene:
Este resultado tiene sentido, toda vez que al final del primer periodo se hizo el primero de los $n$ pagos de la anualidad, lo cual implica que en ése momento aun faltan por realizar $n-1$ pagos, los cuales en valor presente en ése periodo son: $\prescript{}{n}{\mathbf{A}}_i$, expresión que representa la cantidad que se obtiene como saldo insoluto al final del periodo.
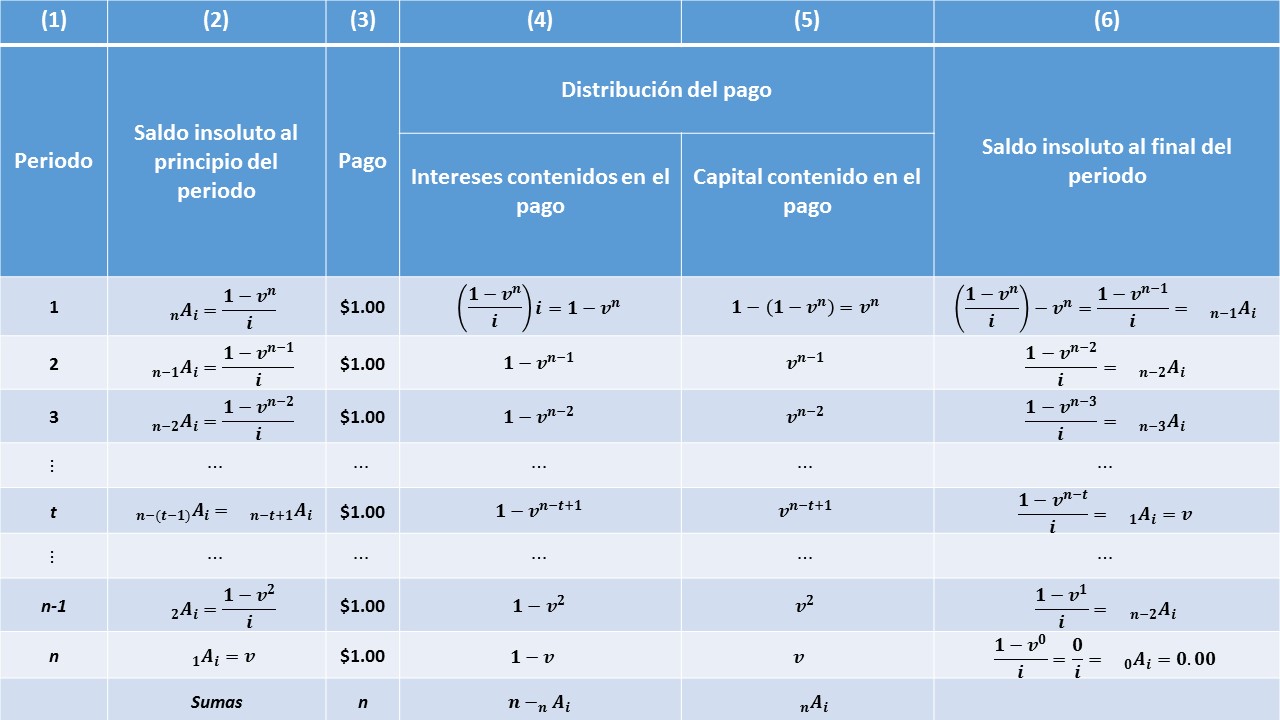
A continuación, se procederá a construir la tabla de amortización de una anualidad vencida ordinaria de $n$ pagos, con un capital de un peso.
Elaboración propia, basado en Matemáticas Financieras, fundamentos y aplicaciones, Cánovas T. Ed. Trillas, pag. 191.
Es importante hacer mención que, en la tabla que se acaba de presentar, la tasa de interés permanece constante, por dicha razón es que no aparece el subíndice $i$ en las expresiones de las $v^t$. Además, el renglón expresado con la letra, $t$ permite hacer el cálculo de cualquiera de las filas, sin tener que calcular toda la tabla, esto nos sirve cuando se da el caso de que el deudor, quiera conocer cuál es el saldo insoluto de su préstamo en cualquier momento, siempre y cuando esté comprendido en el periodo de la vigencia de la operación. Esto también sirve si se desea liquidar en ese momento la totalidad de la deuda o quiera hacer alguna reestructuración de la misma.
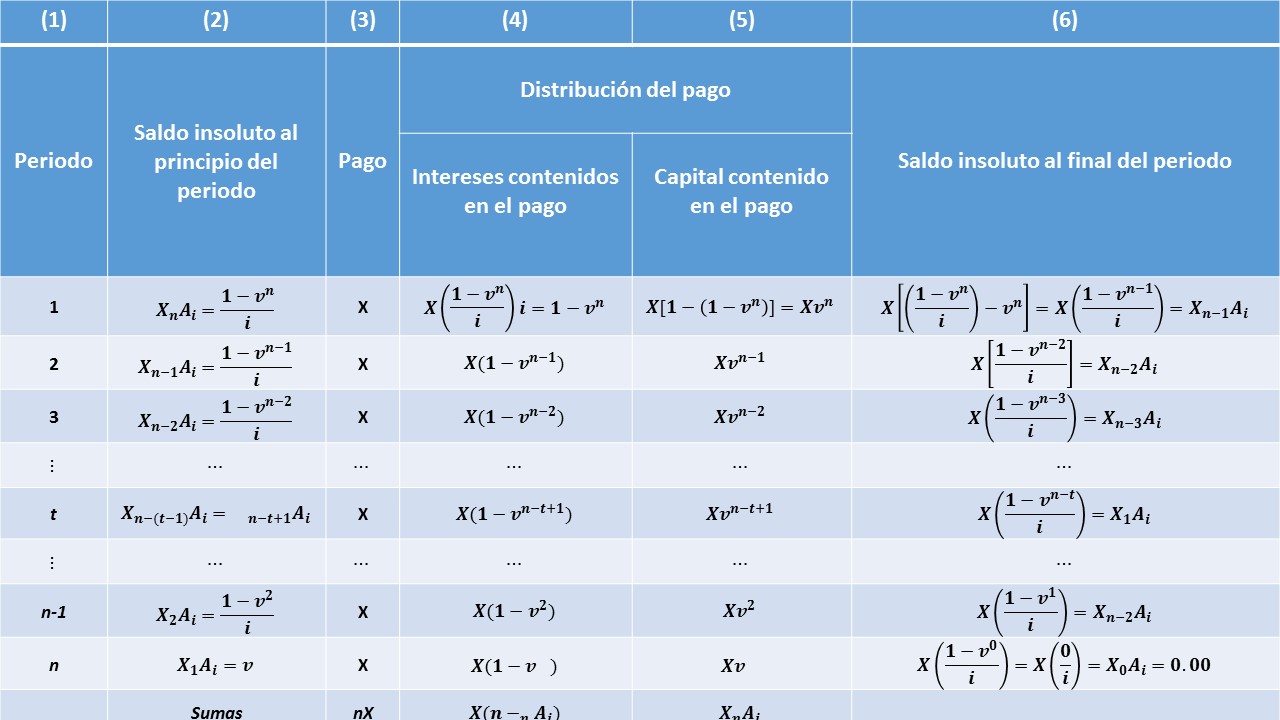
Ahora generalizando la tabla anterior, y sustituyendo el valor de un peso de capital, por la cantidad $X$, se tiene lo siguiente:
Para conocer el valor de $X$, que es la cantidad que determina el pago en la ecuación de valor, se utiliza la expresión:
$$S=X\prescript{}{n}{\mathbf{A}}_i$$
despejando a $X$ se tiene:
$$X=\frac{S}{\prescript{}{n}{\mathbf{A}}_i}$$
y la tabla queda modificada de la siguiente manera:
Elaboración propia, basado en Matemáticas Financieras, fundamentos y aplicaciones, Cánovas T. Ed. Trillas, pag. 192.
Ejercicios resueltos
Ejercicio. El señor Juan desea adquirir una pantalla, para ello solicitó un préstamo por \$30 mil pesos, el cual desea pagar a 24 mensualidades, a una tasa de interés del 15% efectivo mensual, durante toda la duración del crédito. Si al cabo de un año desea liquidar la deuda, ¿Cuál es la cantidad que deberá pagar?
Solución
En primer lugar se procederá a obtener cuánto se deberá pagar cada mes, para ello se hará uso de la siguiente ecuación:
$$X=\frac{S}{\prescript{}{n}{\mathbf{A}}_i}$$
Sustituyendo los valores:
$$X=\frac{30,000}{\frac{1-v_i^n}{i}}$$
$$X=\frac{30,000}{6.4337}=4662.8948$$
El pago sería de $\$4,662.8948$.
Ahora como el señor Juan quiere liquidar su deuda, y se esta trabajando con una forma de pago de manera vencida, entonces el periodo en el que desea liquidar es el número 13.
El saldo insoluto al final del periodo 13 esta dado por la expresión:
$$X=\frac{S}{\prescript{}{n}{\mathbf{A}}_i}$$
sustituyendo los valores n=24, t=12:
La diferencia (n-t) queda: $24-12=12$, entonces el saldo insoluto al final del periodo es \$25,275.77
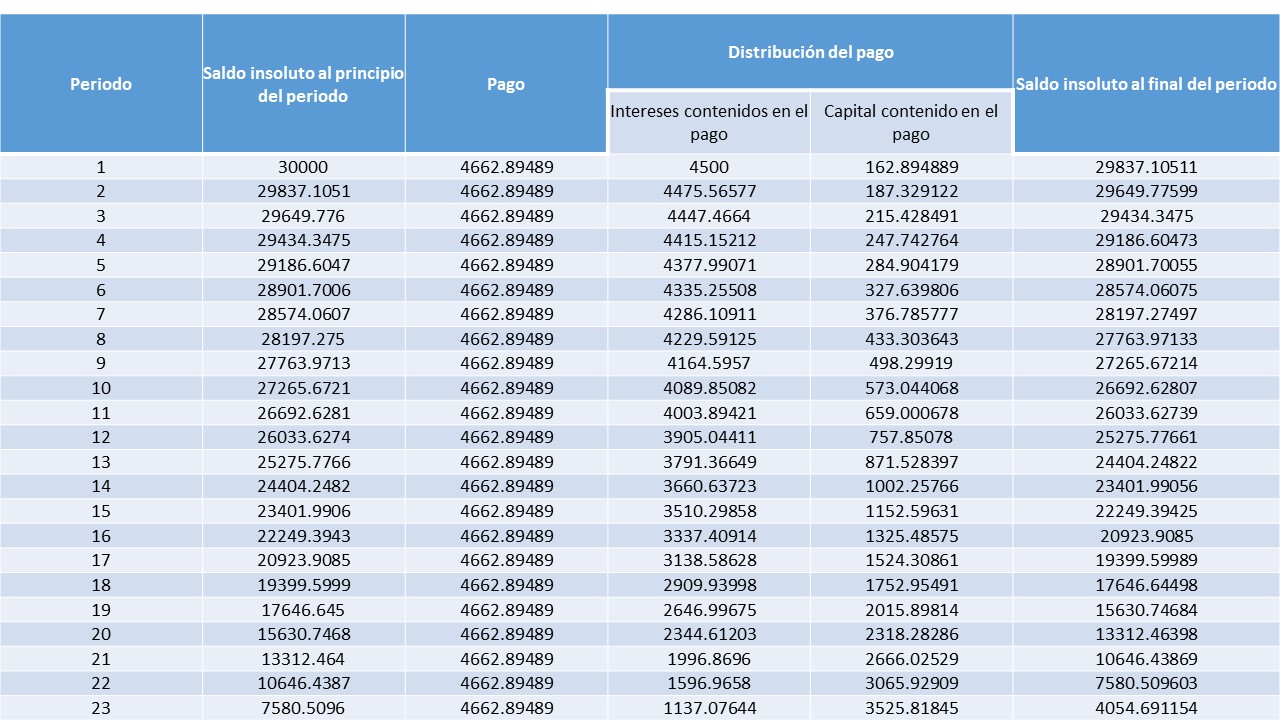
Ejercicio. Calcula la tabla de amortización del ejercicio anterior y corrobora el resultado.
Solución
Efectivamente, se cumple el saldo insoluto al final del periodo corresponde a la cantidad obtenida en el ejercicio anterior.
Más adelante…
Hay ocasiones en los que el mercado financiero, por alguna razón puede sugerir hacer cambios en ésta, dependiendo de muchos otros factores en los que se encuentre la economía, un ejemplo de esto es cuando se decide trabajar con una tasa de interés variable que dependa de alguna tasa de referencia, lo cual afecta directamente la forma en que se vaya a pagar.
Este concepto, se usa cuando las instituciones de crédito, como los bancos, otorgan préstamos y esta herramienta, facilita mucho la forma de cómo describir el comportamiento del pago de una deuda, a través del tiempo. En términos generales, es un tipo de registro que desglosa de manera detallada cada uno de los conceptos que conforman el pago, tales como interés, periodos, cantidad que se paga directo a la deuda, así como el saldo pendiente por liquidar. En este apartado se analizará la forma en que se construye una tabla de amortización, algunas de sus tipos, además; se podrán hacer uso de las anualidades.
Concepto y forma de construir una tabla de amortización
El significado de la palabra amortización, tiene su origen en el latín, la cual significa mort, muerte, y tiene su relación con las matemáticas financieras ya que es una forma de asociar el término de una deuda, misma que estará regida por los conceptos que se han venido trabajando casi en todos los temas, tales como una tasa de interés, un plazo, pagos cada cierto tiempo, etc.
A cualquier operación financiera, se le puede construir una tabla de amortización, ejemplos como el adquirir una casa, un departamento, un automóvil, a crédito, que tenga que ver con una deuda, siempre podremos obtener una forma de pago que deberá ser amortizada.
Recordando un poco lo que se ha estudiado, cuando los pagos que se van a destinar para saldar un préstamo, y se hace uso de alguna de las anualidades que se han visto, sea cual sea la anualidad, todos tienen una forma predeterminada de hacerlos.
Lo anterior, nos permite observar que cuando usamos anualidades, se determina la forma en que se van a hacer los pagos, y a partir de éstas, quedan programados cada cierto tiempo, es bajo este supuesto que en el concepto de tabla de amortización se puede visualizar las cantidades del pago que se destinan a el pago de la deuda, al pago de intereses, la cantidad de pagos que falta por realizar, así como el saldo que aún falta por liquidar.
Es importante hacer mención, que al igual que como se manejó en los diferentes tipos de anualidades, también en las tablas de amortización se puede dar la combinación entre éstas, esto se traduce, a que las cantidades que se destinen para el pago de interés, de capital, que son variables que igual aparecen en las anualidades, también se verán afectados, por lo que no podrán siempre ser las mismas, irán variando dependiendo de las cláusulas que se pacten entre las partes involucradas.
Sin embargo, también es posible que se fijen todas las variables, y en tal caso se podrá tener la cantidad que ascenderá cada uno de los pagos. En cambio, cuando las tasas sean variables, por ejemplo, sólo se podrá conocer cuando se conozca el valor de la tasa de interés. Esto ocurre, cuando en algunos créditos se escoge una tasa de interés (conocida como tasa de referencia, la cual tiene la característica de que se le agregan puntos porcentuales para determinarla), que, por su naturaleza, su valor puede estar cambiando todos los días, cada semana o cada mes.
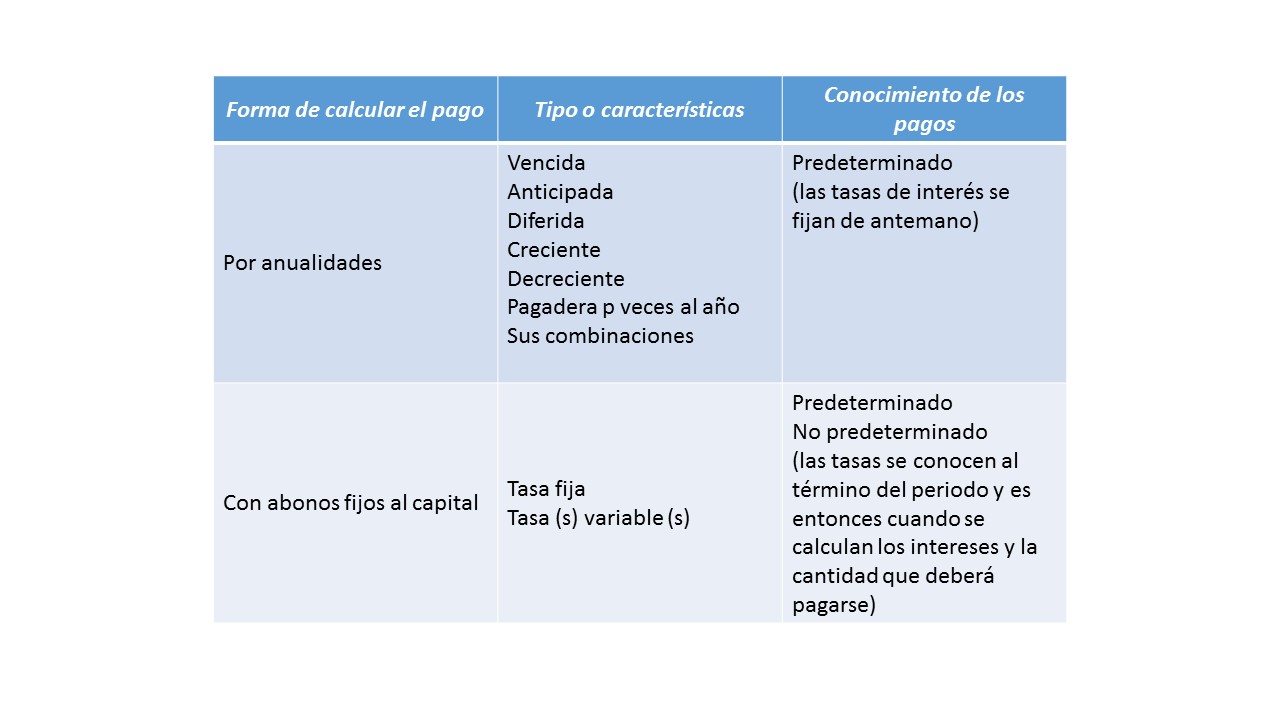
A continuación, se muestran los diferentes tipos de tablas de amortización que se pueden obtener para hacer el pago de un préstamo:
Elaboración propia, basado en Matemáticas Financieras, fundamentos y aplicaciones, Cánovas T. Ed. Trillas, Pag. 184.
En la mayoría de los créditos, cuyos pagos se calculen a través de alguna anualidad, se les proporciona una tabla que contiene, cada uno de los periodos que dura el contrato, además indica la cantidad que se aporta en cada pago, el porcentaje que se destina a pago de intereses, la cantidad que se destina en cada pago para liquidar la deuda, la cantidad de pagos que conforman el crédito, y la cantidad que falta por pagar para poder liquidarlo en su totalidad.
Dicha tabla, recibe el nombre de tabla de amortización, muy útil, porque permite visualizar por cada periodo la forma en que se va pagando el crédito, incluso nos permite saber la cantidad exacta que se debe, cuando se decida pagar antes el crédito, porque nos muestra el saldo insoluto (cantidad que aún se debe hasta ése periodo).
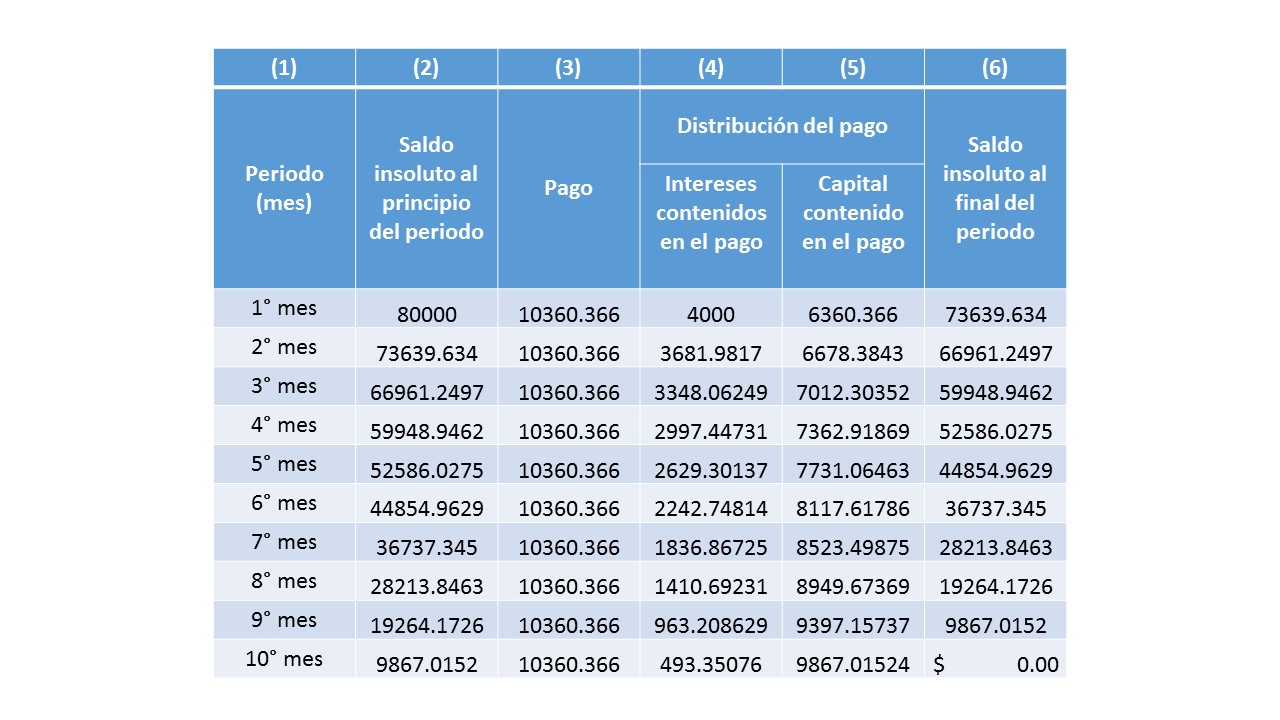
Para realizar la primera tabla de amortización, se hará uso del siguiente ejemplo:
Un banco otorga un crédito a Julia por la cantidad de \$80,000 pesos, la cual se pretende pagar en 10 mensualidades vencidas, con una tasa de interés del 5% efectivo mensual.
En primer lugar, se procederá a obtener el monto de los pagos, haciendo uso de la siguiente ecuación:
En cada columna se describe la información que representa cada uno de los valores que se van a desglosar.
Elaboración propia, basado en Matemáticas Financieras, fundamentos y aplicaciones, Cánovas T. Ed. Trillas, Pag. 185
En la primer columna, se describe el número de cada periodo que en conjunto forman el plazo que se pacto, a través del cual se va a liquidar el crédito.
En la segunda columna, lleva por nombre saldo insoluto, que como se puede observar, la primera casilla, describe la cantidad que fue otorgada el crédito, que en el ejemplo que se está manejando corresponde a la cantidad de \$80 mil pesos, en otras palabras es el total de la deuda. Para la siguiente celda, aparece el saldo insoluto que corresponde al final del periodo anterior, el cual aparece en la columna 6, y se calcula como el saldo al principio del periodo de la columna 2 menos el capital contenido en el pago de la columna 5, esto es, $\$80,000-\$6,360.366=\$73,639.634$.
De forma análoga, se hace el cálculo de los demás renglones, el saldo insoluto es la cantidad que aparece al principio del periodo que es igual al saldo insoluto al final del periodo anterior. Esto ocurre porque el tiempo que pasa entre el fin de un periodo y el inicio de otro es cero.
En la tercera columna, corresponde al pago, que consiste en la cantidad que se va a estar aportando cada periodo, misma que contiene la cantidad que se destina a los intereses, como la cantidad que se destina a pagar la deuda, y es la que se obtuvo en la ecuación de valor y es igual a $\$10,360.366$. Cabe hacer mención que ésta no va a ser modificada, será la misma en las demás celdas.
Columna cuatro, se describe los intereses contenidos en el pago, cantidad que se obtiene de multiplicar el saldo insoluto al principio del período (columna 2), por la tasa de interés efectiva por período, que en éste ejemplo es la misma para toda la duración del crédito, lo cual implica que también es la misma para todos los periodos. Esto es: $(\$80,000)(0.05)=\$4,000$.
Las demás celdas serán calculadas de la misma forma:
(Saldo Insoluto al Principio del Periodo)(Tasa Interés Efectiva Mensual)=
=Intereses Contenidos en el Pago.
En la columna 5, Capital contenido en el pago, cantidad que se obtiene de restar el pago (columna 3) menos los intereses contenidos en el pago (columna 4), es decir;
$(\$10,360.366)-(\$4,000)=\$6360.366$
Esta es la cantidad, que en verdad se aporta en ésta mensualidad para liquidar la deuda.
Finalmente, en la columna 6, Saldo insoluto al final del periodo, corresponde a la cantidad que falta aún por pagar. Se obtiene de la siguiente operación
Saldo insoluto al principio del período (columna 2) menos el capital contenido en el pago (columna 5), lo que es igual al saldo insoluto al final del periodo, esto es:
$(\$80,000)-(\$6360.366)=\$73,639.634$
De forma análoga, se van a construir las demás filas, sin embargo, es necesario considerar que el saldo insoluto al final del periodo es el mismo que el saldo insoluto que aparecerá al principio del segundo.
Recapitulando, algunos puntos importantes de la tabla de amortización que se acaba de construir, destacan:
El saldo insoluto al principio del periodo, que corresponde a la columna 2, y el saldo f insoluto al final del periodo (columna 6), van a ir disminuyendo en cada fila, esto ocurre porque cada renglón se representa un periodo, en el que se realiza un pago, y por consiguiente se liquida una parte de la deuda. Ésta es la misma razón, por la que al final de la tabla, el saldo insoluto al final del periodo debe quedar en cero, pues en el último periodo es cuando se liquida por completa la deuda.
En el ejemplo que se manejó, se pactaron que las mensualidades fueran las mismas, de un pago de $\$10,360.366$ en cada una, sin embargo; no siempre van a ser así, ya que como se ha visto en el tema de las anualidades, hay ocasiones en las que, dependiendo del tipo de éstas, con que se elija trabajar para hacer el pago de algún crédito, van a estar determinados los pagos.
Los intereses contenidos en el pago, que corresponde a la columna 4, también van a estar disminuyendo, esto ocurre porque conforme se vaya avanzando en las mensualidades, se va a ir disminuyendo la cantidad que aún falte por pagar, y como los intereses son calculados justamente a partir de la cantidad que se deba (saldo insoluto), pues mientras menos se deba, menos intereses se irán pagando.
El pago de $\$10,360.366$, ya contiene la cantidad que se destina a liquidar los intereses, así como, la cantidad que se destina para liquidar la deuda adquirida, esto ocurre porque la forma en que se calcular la anualidad vencida $\prescript{}{10}{\mathbf{A}}_{0.05}$, trae a valor presente cada uno de los pagos, haciendo uso de la expresión: $v_i^1+v_i^2+v_i^3+…+v_i^n$, la cual garantiza que los intereses se están siendo calculados del saldo insoluto.
En la práctica, es frecuente encontrar operaciones de crédito que otorgan éste, a partir de dar cierto enganche, el cual representa un porcentaje del valor total del bien que se está adquiriendo, algunos ejemplos de ésta situación se dan cuando se pretende adquirir un automóvil, algún terreno, electrodomésticos, etc.
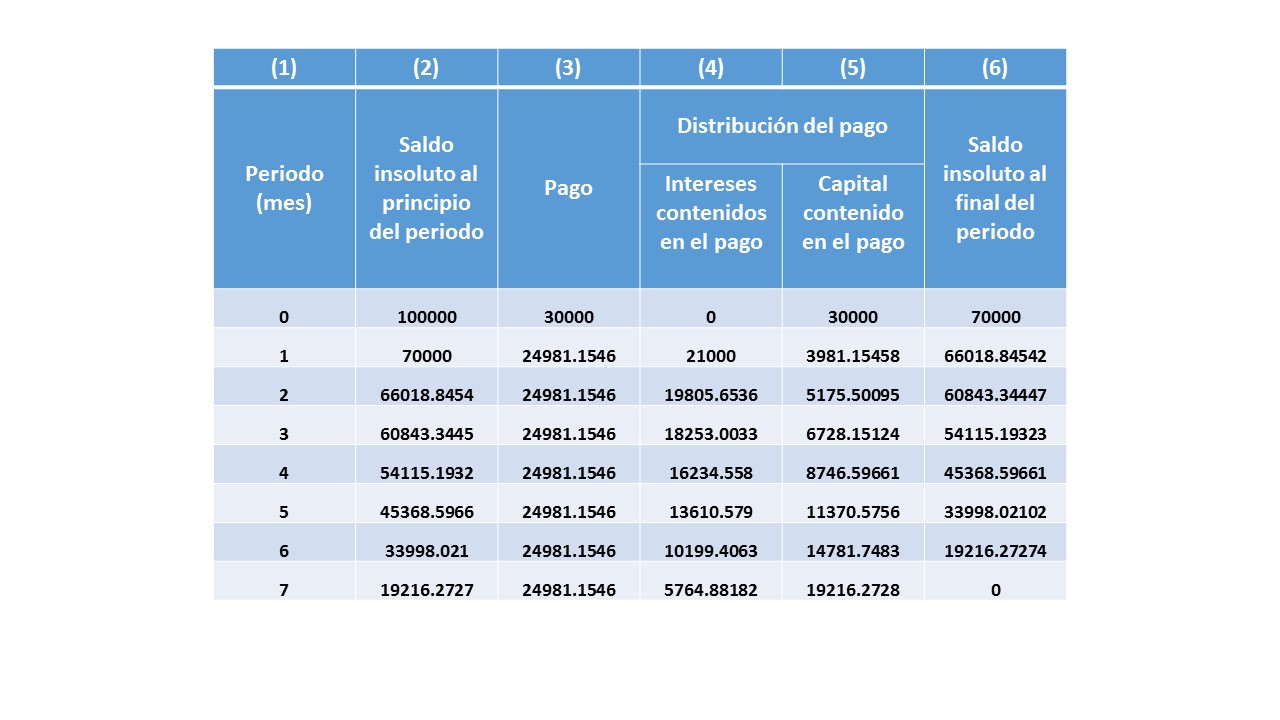
En este contexto, lo que regularmente se hace para construir la tabla de amortización es agregar una fila o renglón, el cual jugará el papel de periodo cero de la tabla, en el que quedará registrado el pago de dicho enganche, y como se paga al inicio de la operación, se considera que no ha transcurrido nada de tiempo, de allí su nombre. Es importante señalar que como no ha transcurrido tiempo, entonces no hay intereses que se hayan generado, lo que se interpreta el monto del enganche es directo a liquidar ése porcentaje de la deuda adquirida.
En estos casos lo que se hace es, que el saldo insoluto al principio del periodo cero, se a igual al valor total del bien que se pretende comprar, y el pago que realizan que corresponde al enganche es 100% el enganche y el saldo insoluto al final del periodo es igual al valor total del bien que se va a adquirir menos el enganche pagado. Luego los siguientes renglones son calculados a partir del saldo que se obtuvo de ésta operación, la cual se convierte en la cantidad real por la que se ha adquirido el crédito.
Ejercicios resueltos
Ejercicio. Una persona desea adquirir un automóvil, con un valor de \$100 mil pesos, pagando un enganche del 30%, y el resto lo quieren pagar en 7 mensualidades con una anualidad vencida de pagos iguales, con una tasa de interés del 15% efectiva anual.
Solución
En base a la teoría que se abordó en ésta sección, lo primero que debemos hacer es determinar la cantidad real por la cual nos están otorgando el crédito, la cual se obtiene restando la cantidad del enganche que inicialmente fue solicitada, a la cantidad total por la cual fue otorgado el crédito.
$\$100,000(0.30)=\$30,000$
El saldo que se obtiene es de $\$100,000-\$30,000=\$70,000$
El pago se determina despejando de la siguiente ecuación de valor a $X$:
Ahora se realizará la construcción de la tabla de amortización que requiere éste problema
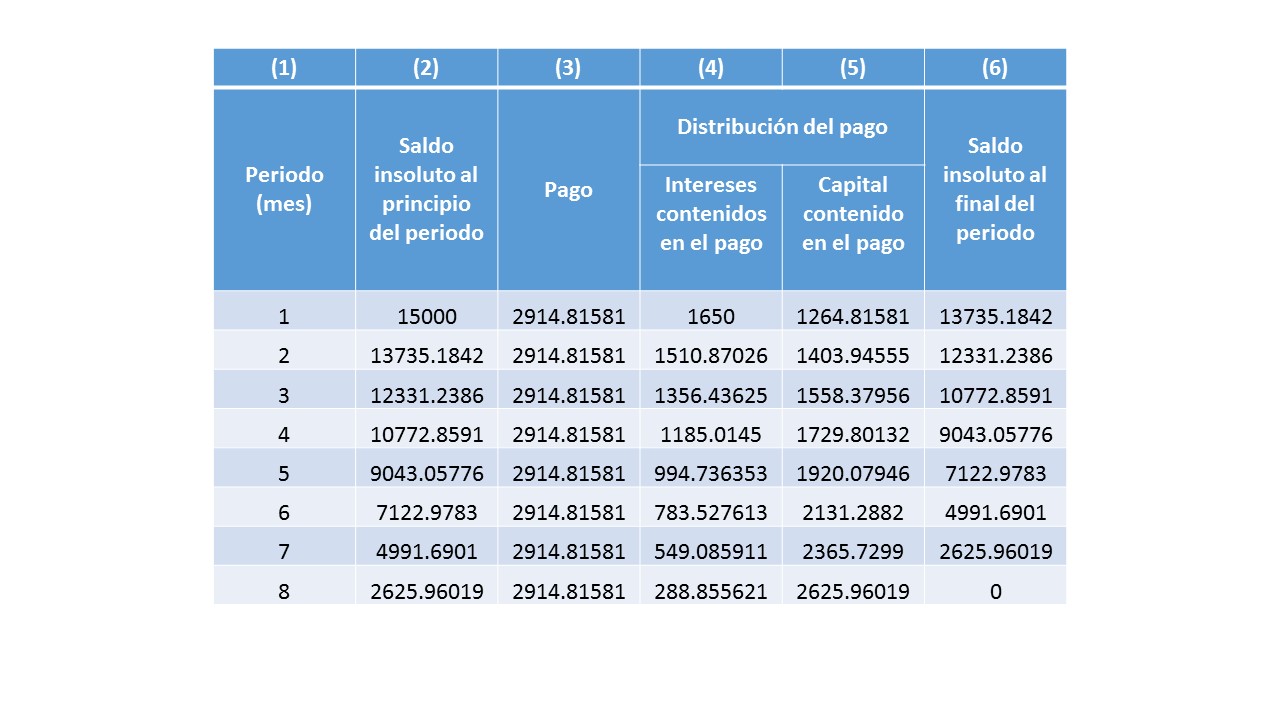
La empresa de estampados del señor Adrián, quiere saber cuánto es la cantidad que deberá tener que pagar, por un crédito de \$15 mil pesos, si la entidad financiera, le esta cobrando una tasa de interés del 11% trimestralmente, durante 2 años
Solución
Para encontrar la solución, se hará uso de la siguiente ecuación:
La tabla de amortización, que se trabajó en ésta sección corresponde a la forma general de construirla, sin embargo, como ya se mencionó puede tener variantes, dependiendo de las condiciones que se pacten entre los involucrados a la hora de firmar el contrato de crédito, como se verá en los siguientes temas.
Se analizó el concepto de razón cruzada como ${ABCD}= \lambda$ dados cuatro puntos colineales, pero existen veinticuatro permutaciones de estos cuatro puntos, por lo cual se tienen razones cruzadas para cada una de estas. El detalle está en que se pueden agrupar solo en seis tipos de razón cruzada.
Proposición. Dados cuatro puntos colineales distintos $A,B,C$ y $D$ en una recta $l$ y ${ABCD}= \lambda$. Se tienen seis tipos de razón cruzada:
${ABCD}={BADC}={CDAB}={DCBA}=\lambda$
${ABDC}={BACD}={CDBA}={DCAB}=1/\lambda$
${ACBD}=1- \lambda$
${ACDB}=\frac{1}{1-\lambda}$
${ADBC}=\frac{\lambda-1}{\lambda}$
${ADCB}=\frac{\lambda}{\lambda-1}$
Construcción del cuarto elemento
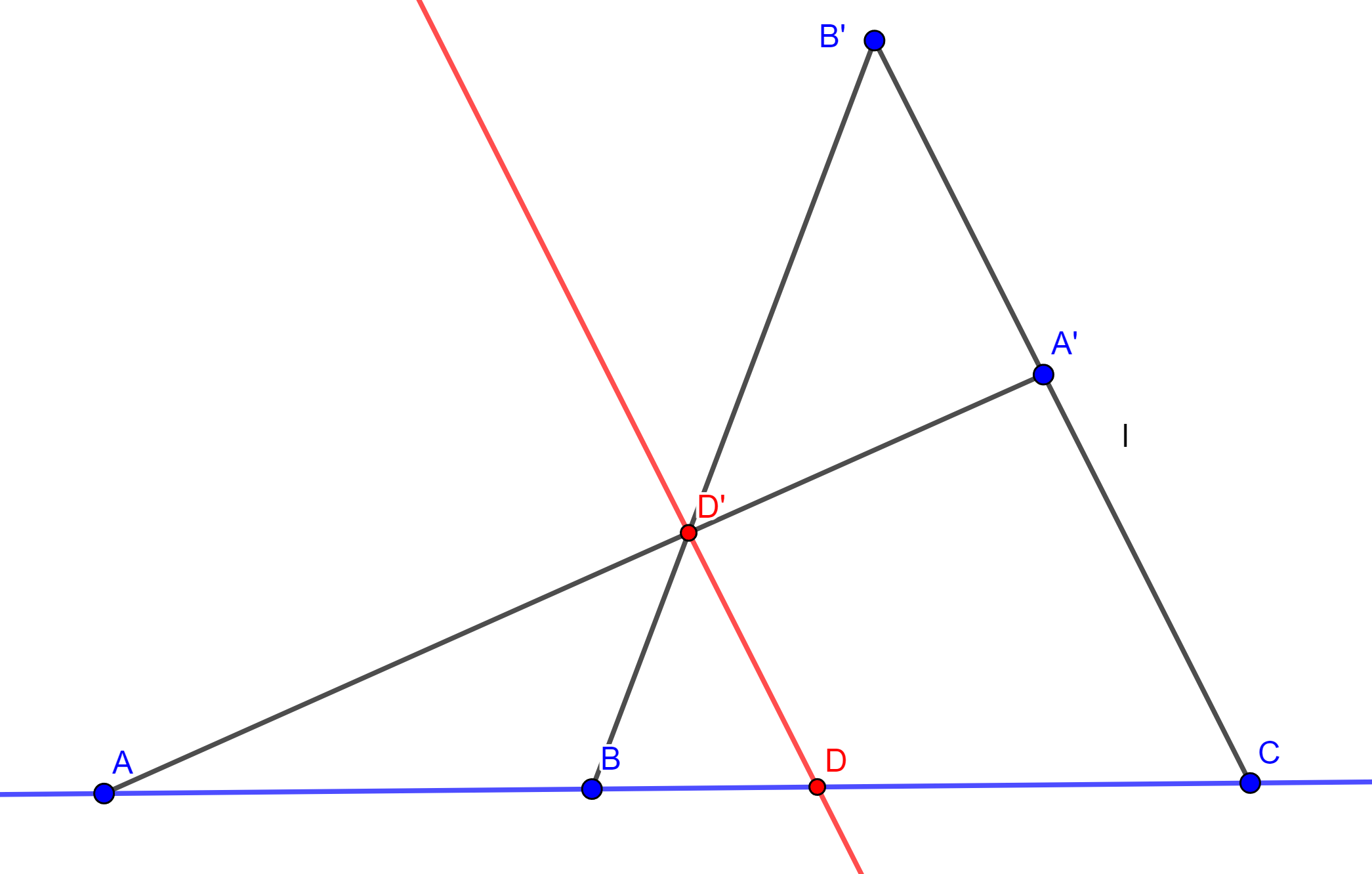
Dados tres puntos $A,B,C$ colineales distintos, se requiere construir un cuarto punto $D$ colineal con ellos tal que ${ABCD}=\lambda$.
Sea $l$ cualquier recta por $C$, sobre esta tomemos dos puntos $A’$ y $B’$ tales que $CA’/CB’=\lambda$. Ahora unimos $B’$ con $B$ y $A’$ con $A$, de tal forma que $AA’ \cap BB’=D’$, y por este punto de intersección trácese la paralela a $CB’$ que interseque la recta $x$ por $D$. Es decir, $DD’ \parallel CB’ = l$.
Por demostrar ${ABCD}=\frac{AC}{CB}/\frac{AD}{DB}=\lambda$.
Demostración. Se tiene que los triangulos $\triangle B’BC \sim \triangle D’BD$, $\triangle A’AC \sim \triangle D’AD$, por lo cual:
$\frac{B’C}{D’D}=\frac{BC}{BD}$ y $\frac{A’C}{D’D}=\frac{AC}{AD}$.
Entonces
$\frac{CB’}{D’D}=\frac{CB}{DB}$ y $\frac{CA’}{DD’}=\frac{AC}{AD}$.
En el tema anterior, se logró obtener las herramientas necesarias para estar en condiciones, de poder evaluar un proyecto de inversión. Para poder estudiar este tipo de anualidades, se hará uso de algunas herramientas de cálculo diferencial e integral, ya que se pretende abordar dicho tema, desde un enfoque infinitesimal con la finalidad de poder calcular las tasas instantáneas de interés (fuerza de interés).
Descripción y valor presente
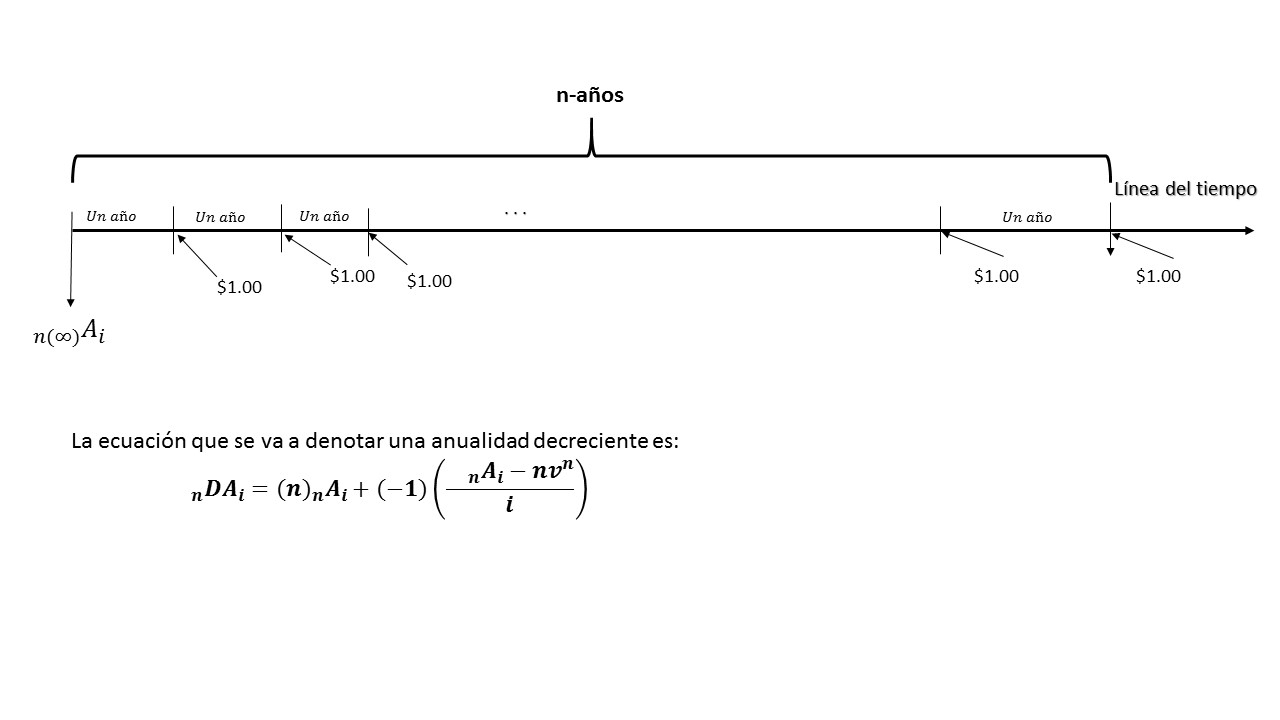
Este tipo de anualidades, sólo se usan para mostrar el comportamiento de un crédito en cada instante, ya que como se ha mostrado en las anualidades que hasta este momento se han estudiado, mantiene tiene su relación con el concepto de amortización el cual va ligado con cierta periodicidad. Cabe hacer mención que, como su nombre lo indica, este tipo de anualidad se caracteriza por realizar los pagos a cada «instante», motivo por el cual este tipo de anualidad no tienen aplicación en la vida real.
Elaboración propia, basado en Matemáticas Financieras, fundamentos y aplicaciones, Cánovas T., Ed. Trillas, pag. 180.
En la imagen anterior, se muestra gráficamente el comportamiento que tiene una anualidad continua, en la que se observa los pagos que la caracterizan, ya que por ser una línea recta, ésta cuenta con una infinidad de puntos, que a su vez representan un número infinito de pagos que serán efectuados cuando haya transcurrido un cierto lapso de tiempo. De cierta forma, éste tipo de anualidad tiene similitud con el tema anterior (anualidades pagaderas p veces al año), ya que ésta se calcularía igual, con la diferencia que sería pagadera un número infinito de veces al año. Bajo ésta idea, es como se va a desarrollar el modelo para representar una anualidad continua.
El valor presente de ésta anualidad queda denotado por la siguiente expresión:
Haciendo otro recordatorio; a partir de la triple igualdad se tiene $v^t=e^{-\delta t}$, despejando a $\delta$ para obtener $ln v=-\delta$. Luego sustituyendo éste valor en la ecuación y multiplicando por menos uno nos queda la ecuación que se venía trabajando en:
De ésta ecuación, se va a calcular el valor presente para una anualidad continua a $n$ año, con un capital de un peso pagadero anualmente un número infinito de veces. Una observación que es importante resaltar, es que tiene mucha similitud con la anualidad pagadera $p$ veces al año, con una tasa de interés efectiva anual:
Esta ocurre, porque el valor de una tasa nominal tiende a $\delta$ cuando $m$ tiende a $\infty$, ahora, si la anualidad cambiamos el capital de un peso por un capital con valor $X$, entonces la expresión para obtener el valor presente queda expresada como:
Para calcular el monto de una anualidad continua, se seguirá calculando en primera instancia con un peso como capital, a fin de simplificar los cálculos.
Se tiene que el monto de una anualidad continua, con un capital de un peso anual convertible infinitamente al año, durante $n$ años, a una tasa efectiva anual, queda denotado por la expresión:
Aunque las anualidades continuas, no tienen aplicación o uso en la vida real, es importante señalar que; en la anualidad continúa el pago se hace un número infinito de veces, esto no quiere decir que el monto acumulado después de un tiempo será infinito, porque el pago anual se va a dividir entre infinito para poder obtener dichos pagos, luego entonces, una cualquier cantidad dividida, entre infinito, el resultado es una cantidad que prácticamente sea cero. Por ésa razón este tipo de anualidad será omitido el calificativo de pagadera un número infinito de veces al año, ya que no es posible calcular dichos pagos, sólo se puede calcular las anualidades con capital de un peso o capital $X$, así como sólo se puede calcular su monto y su valor presente.
Ejercicios resueltos
Ejercicio. Calcular el valor presente de la siguiente anualidad continua a 5 años, de un peso, con una tasa de interés del 5% anual.
Solución
Para resolver éste ejercicio se necesitará la siguiente ecuación:
Hasta este momento, ya se cuenta con herramientas suficiente para poder hacer operaciones más complejas, como lo es evaluar un proyecto de inversión, tema que será estudiado un poco más adelante, antes se abordaran algunos temas como el de amortización que nos permitirá facilitar ciertas operaciones que son muy útiles en la práctica.
En este apartado, se abordará uno de los temas más típicos que nos podemos encontrar dentro de las matemáticas financieras, y se caracteriza por ser uno de los temas que comienzan a combinar las reglas;, en el sentido de que vamos a utilizar variantes que hasta el momento no se habían utilizado, tales como, la periodicidad de la tasa de interés no va a coincidir con la que se está manejando en el tipo de pagos, motivo por el que se tendrá que utilizar un tipo de tasa equivalente. Sin embargo, como se verá más adelante, siempre va a ser posible encontrar una tasa efectiva que logre resolver éste problema. Uno de los principales objetivos de este tipo de anualidad es explicar de forma sencilla la forma en que se puede amortizar un crédito.
Descripción general
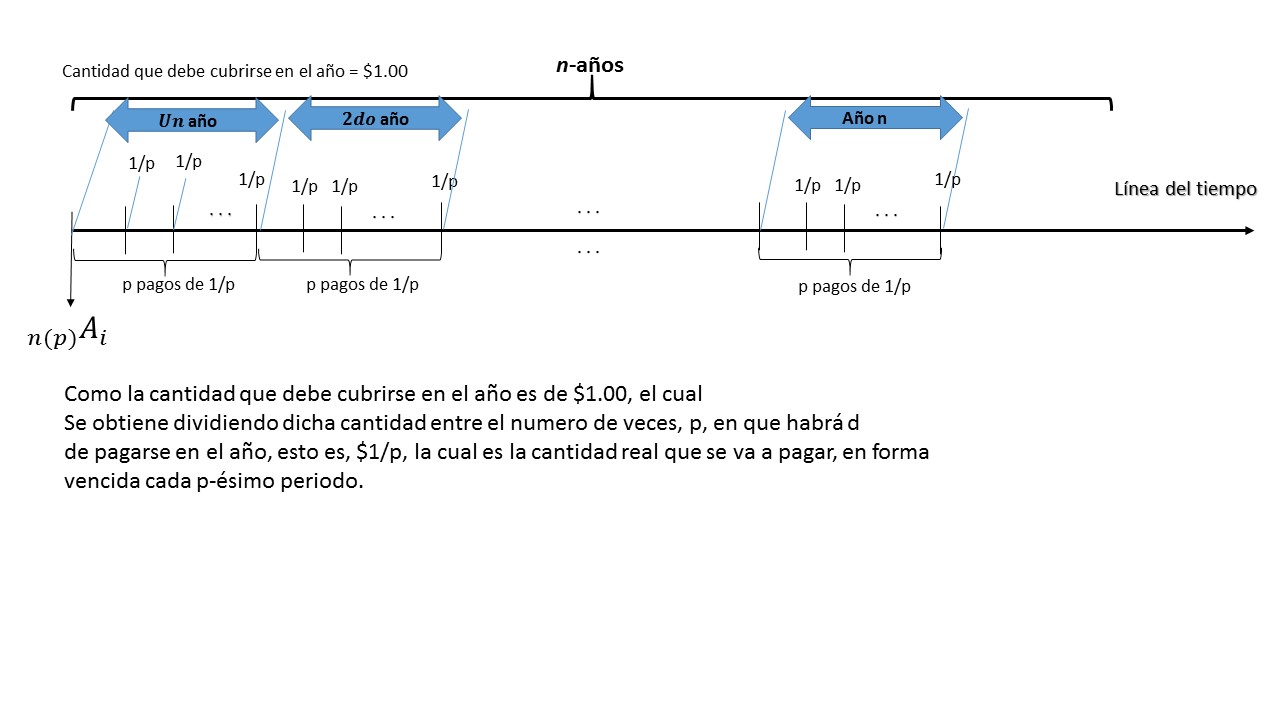
Este tipo de anualidad, tiene como punto de partida una cantidad que debe de cubrirse durante justamente un año, dicha cantidad deberá de ser la misma durante los años que siguen, hasta que; se haya pagado la totalidad de la deuda, que se haya adquirido. Su principal característica, consiste en que se defina el número de veces $p$ en que serán realizados los pagos durante el año, lo anterior, quiere decir que; dicha cantidad anual será dividida entre $p$ para obtener la cifra que será pagada cada p-ésimo año. Por ejemplo, si un contrato de crédito estipula que la deuda será pagada con anualidades de \$24,000 pagaderos mensualmente, esto significa que cada mes se realizará un pago de \$2,000 durante los 12 meses que tiene dicho año. Este tipo de anualidades, son muy parecidas al tema de tasas nominales, las cuales coinciden con la misma característica de ser pagaderas $m$ veces al año.
Vale la pena recordar, que las tasas nominales, se obtienen de dividir una tasa nominal entre $m$. Por lo que de forma similar, se pueden calcular este tipo de anualidades, sólo que la cantidad que se pretende pagar durante el año, es una referencia y cada uno de los $p$-ésimos; es la cantidad real que se va a pagar, además de que serán estas cantidades las que se utilizarán, cuando se quiera calcular su valor presente.
Al hacer uso de este tipo de anualidades, se pueden tener las siguientes variaciones:
Del tipo de anualidad en el que la periodicidad de la tasa sea menor a la del periodo de cada pago.
Cuando el periodo del pago sea igual al de la tasa.
Cuando la periodicidad de la tasa sea mayor que la del pago.
La siguiente gráfica nos muestra el comportamiento de este tipo de anualidad:
Elaboración propia, basado en Matemáticas financieras, fundamentos y aplicaciones, Cánovas T. Ed. Trillas, pag. 172.
La imagen muestra el comportamiento de una anualidad pagadera p veces al año, la cual será denotada por:
$$\prescript{}{n(p)}{\mathbf{A}}_i$$
donde:
$n$ es la cantidad de años que se pactó, en los cuales se va a realizar el pago del crédito.
$p$ es la cantidad de veces que la anualidad será pagadera en un año.
$i$ es la cantidad de interés, que en particular para este tipo de anualidades, no será precisamente efectiva por $p$-ésimo cada periodo.
Valor presente con tasa de interés efectiva anual
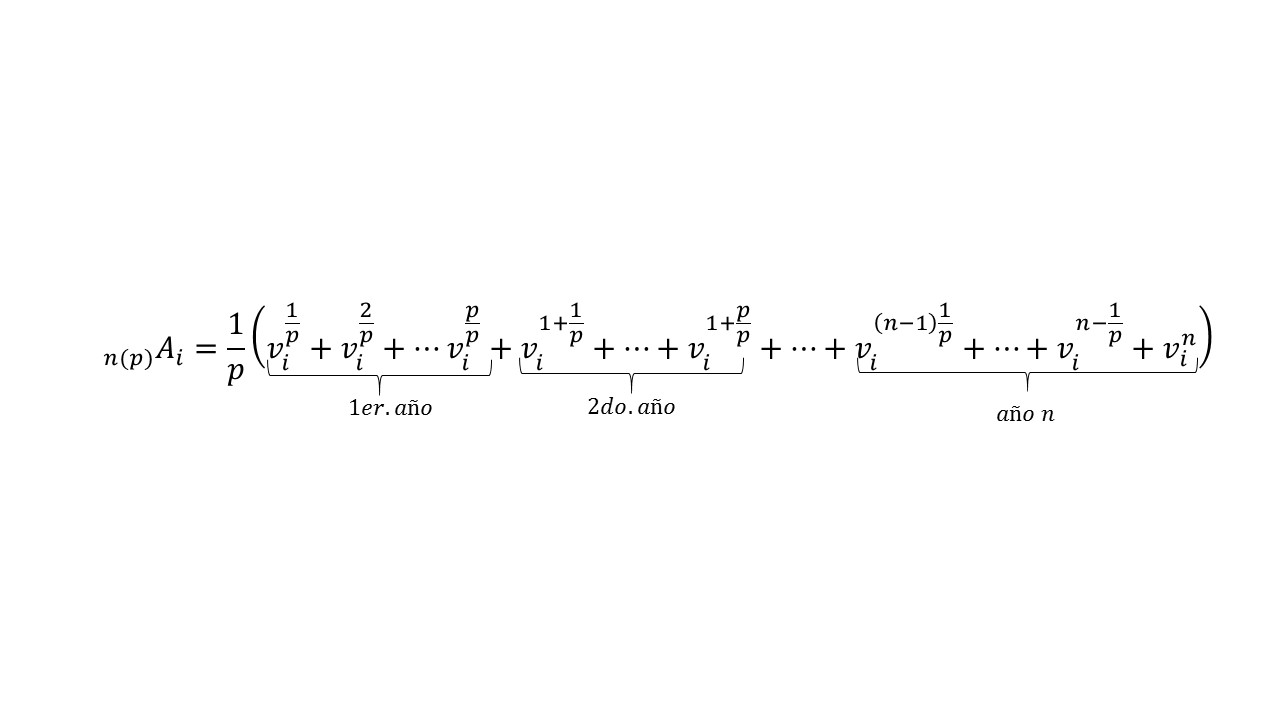
Para obtener el valor presente de este tipo de anualidades, haciendo los cálculos con un capital de \$1 peso, a una tasa de interés efectiva anual $i$, se hace lo siguiente:
Por otra parte, para obtener el valor presente de ésta anualidad, es necesario calcular una tasa efectiva por $p$-ésimo, así como una $i’$, que sea equivalente efectiva anual, para lograrlo se hace lo siguiente:
Usando la tasa que se acaba de obtener, se puede calcular la anualidad a $n$ años, pagadera $p$ veces al año, como una anualidad vencida de $np$ pagos de $1/p$ (que significa $p$ pagos al año, aplicados por $n$ años). El valor presente de dicha anualidad queda denotado por la expresión:
Observación, para el cálculo de todas éstas expresiones se utilizó un capital de \$1 peso, entonces al cambiar dicho valor por uno $X$, la expresión obtenida del valor presente queda como:
Otro método para encontrar el valor presente de una anualidad pagadera $p$ veces al año con una tasa de interés efectiva anual, es calculando el monto al final del año, y de los pagos $p$, $1/p$ que se realizan durante dicho año.
Lo que se acaba de obtener nos dice que el pago anual es equivalente a la suma de los $p$ pagos de $1/p$, que se realizan en el año, los cuales son acumulados con una tasa de interés efectiva anual, observe que la suma aritmética de cada uno de ellos es igual a uno.
Finalmente, la expresión del valor presente de una anualidad pagadera p veces al año es:
Las anualidades pagaderas $p$ veces al año, se resuelven calculando una tasa efectiva equivalente por periodo de pago, aplicando el modelo de anualidades vencidas, considerando que los pagos se realizan $p$ veces de $1/p$ cada año.
Observación: para calcular una anualidad pagadera $p$ veces al año, con una tasa nominal de interés, sólo es necesario calcular la tasa equivalente por periodo de pago, haciendo uso del modelo de anualidades vencidas, tomando en consideración que realizan $p$ pagos de $1/p$ de forma anual.
Monto
Para calcular el monto de este tipo de anualidades, se va a obtener partiendo de un capital de \$1 peso, para luego obtener su valor presente por $n$ periodos con una tasa efectiva anual, o durante $np$ periodos en el caso de que la tasa sea efectiva por cada periodo de pago.
Para el primer supuesto, se utiliza la siguiente ecuación:
Ejercicio. Una empresa de mantenimiento de maquinaria pesada para la construcción, necesita un crédito para modernizar su planta, por una cantidad de \$120 mil. El banco con el que está realizando dicho préstamo, le ofrece que lo pague en dos años, con pagos semanales a una tasa de interés efectiva anual del 15%. Se necesita saber ¿cuánto se pagara cada semana?
Solución
Para este caso, como el pago va a ser semanal, se tiene una tasa pagadera 52 veces al año, con una tasa de interés efectiva anual, lo cual implica que se necesita una tasa que sea equivalente efectiva semanal, la cual se obtiene de la siguiente forma:
$$1+i’=(1+0.15)^{\frac{1}{52}}$$
de donde $i=.002691$
Luego la ecuación que se va a utilizar es la siguiente:
Por lo tanto, el pago semanal que se tiene que realizar es de: \$1324.37.
Ejercicio. La empresa COPPEL vende articulos para el hogar, entre los que destacan electrodomésticos, ropa, muebles, etc. Una familia desea adquirir una sala, el valor de ésta asciende a \$40,000, si al solicitar el crédito aportan un enganche de \$10 mil pesos, y el resto lo pagan a crédito. ¿Cuánto es lo que deben de pagar cada mes, si la tasa de interés que les están cobrando es del 35% pagadero mensual.
Solución
En este ejemplo se presenta el caso en el que el plazo de la tasa de interés coincide con la temporalidad de los pagos, esto es, m=p. En tal situación la ecuación que se va a utilizar para resolverlo es la siguiente:
Hasta este momento se han estado analizando varios tipos de anualidades, y como bien se podrá observar, las combinaciones entre ellas cada vez es mayor, lo que implica con ello, un mayor grado de dificultad, sobre todo cuando se esté trabajando con tasas equivalentes, en las que muchas veces sólo se deja indicada la operación, sin embargo es necesario tener muy en cuenta que ésos cálculos no deben de ser olvidados. En los temas siguientes se irán abordando más tipos de anualidades, en particular las que son del tipo continuas.