Introducción
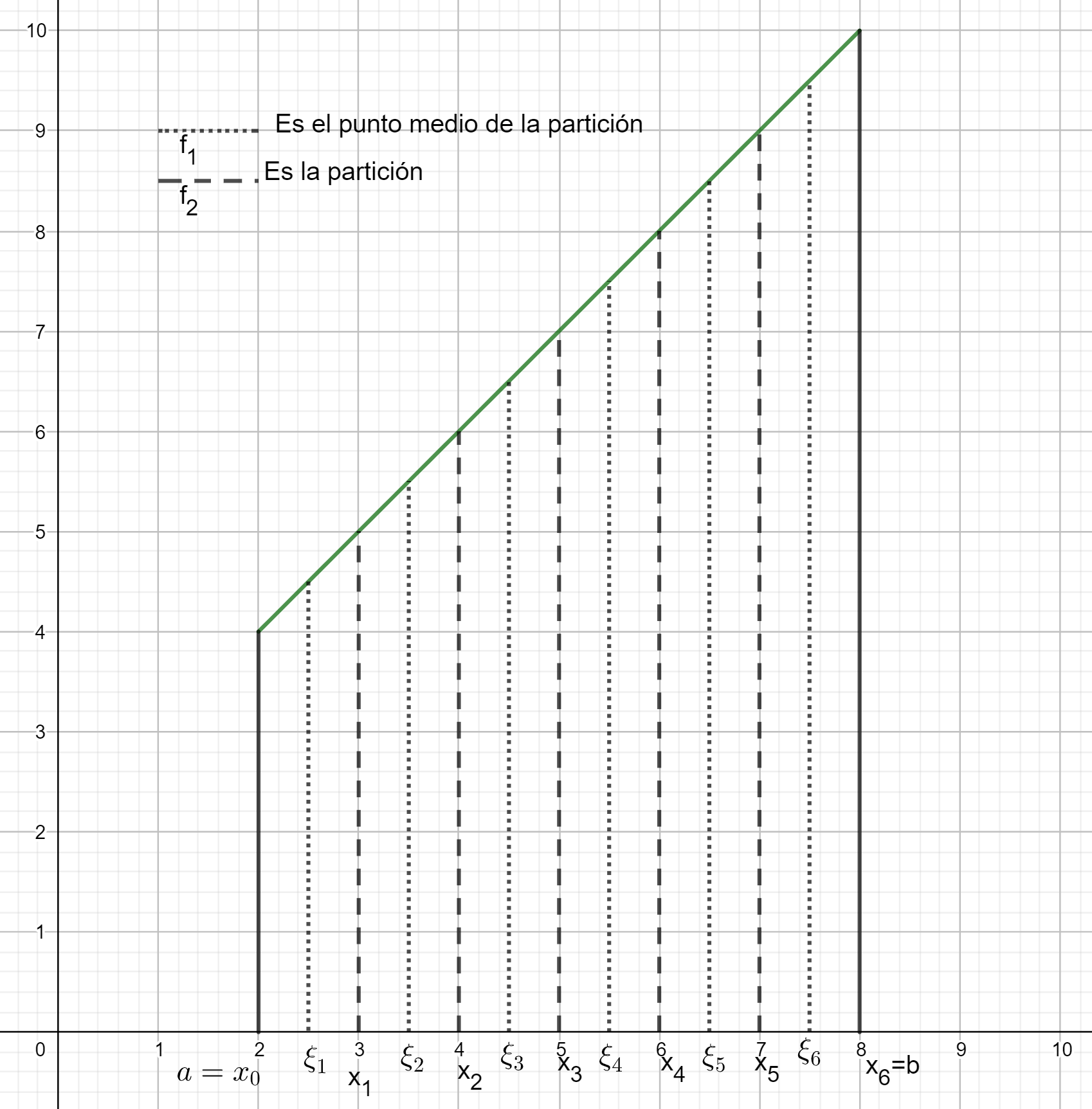
En una entrada anterior, presentamos un ejemplo de integración por punto medio que sirve como introducción al tema del teorema del valor medio para la integral. En dicho ejemplo, aproximamos la integral mediante sumas de áreas de rectángulos cuyas bases eran todas iguales, y cuya altura estaba dada por la evaluación de una función en el punto medio de cada intervalo.
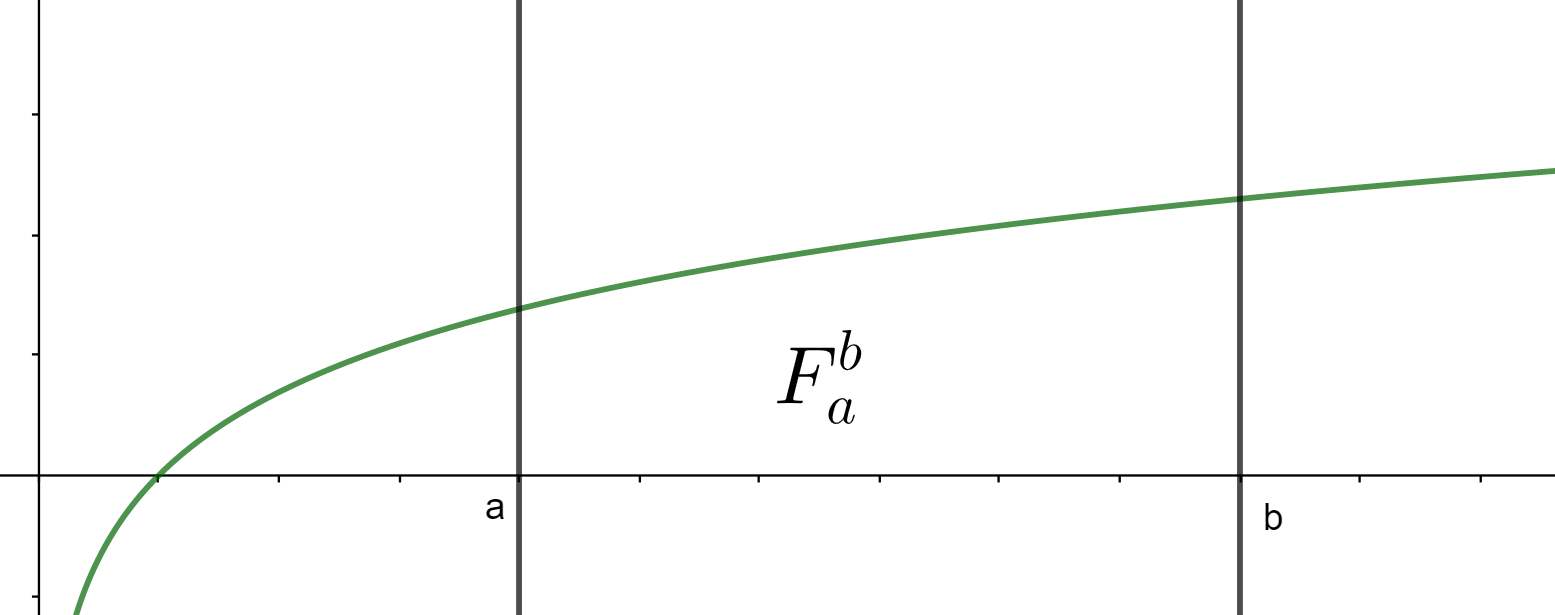
Esta manera de aproximar una integral usando algún punto arbitrario dentro de cada intervalo de una partición, y haciendo la suma de Riemann correspondiente, será el punto de partida para entender primero a la integral como un promedio, y luego para llevar ese entendimiento más allá y enunciar el teorema del valor medio para la integral. Lo que nos dirá este teorema es que cuando una integral de una función continua exista, entonces dicha integral siempre puede calcularse como la longitud del intervalo de integración, por la evaluación de la función en algún punto del intervalo.
A continuación formalizamos estas ideas.
Función promedio e intuición del teorema del valor medio
Quizás recuerdes la siguiente definición de tu educación básica.
Definición. Sean $z_1,\ldots,z_n$ números reales. Su promedio o media aritmética es el número
$$\frac{z_1 + z_2 + … + z_n}{n}.$$
De manera similar, si tomamos $x_1,\ldots,x_n$ números en un cierto intervalo $[a,b]$ y $f:[a,b]\to \mathbb{R}$, entonces podemos considerar a los valores $f(x_1),\ldots,f(x_n)$ y obtener su promedio:
$$\frac{f(x_1) + f(x_2) + … + f(x_n)}{n} .$$
A esto le llamamos el valor promedio de la función en $x_1,\ldots,x_n$.
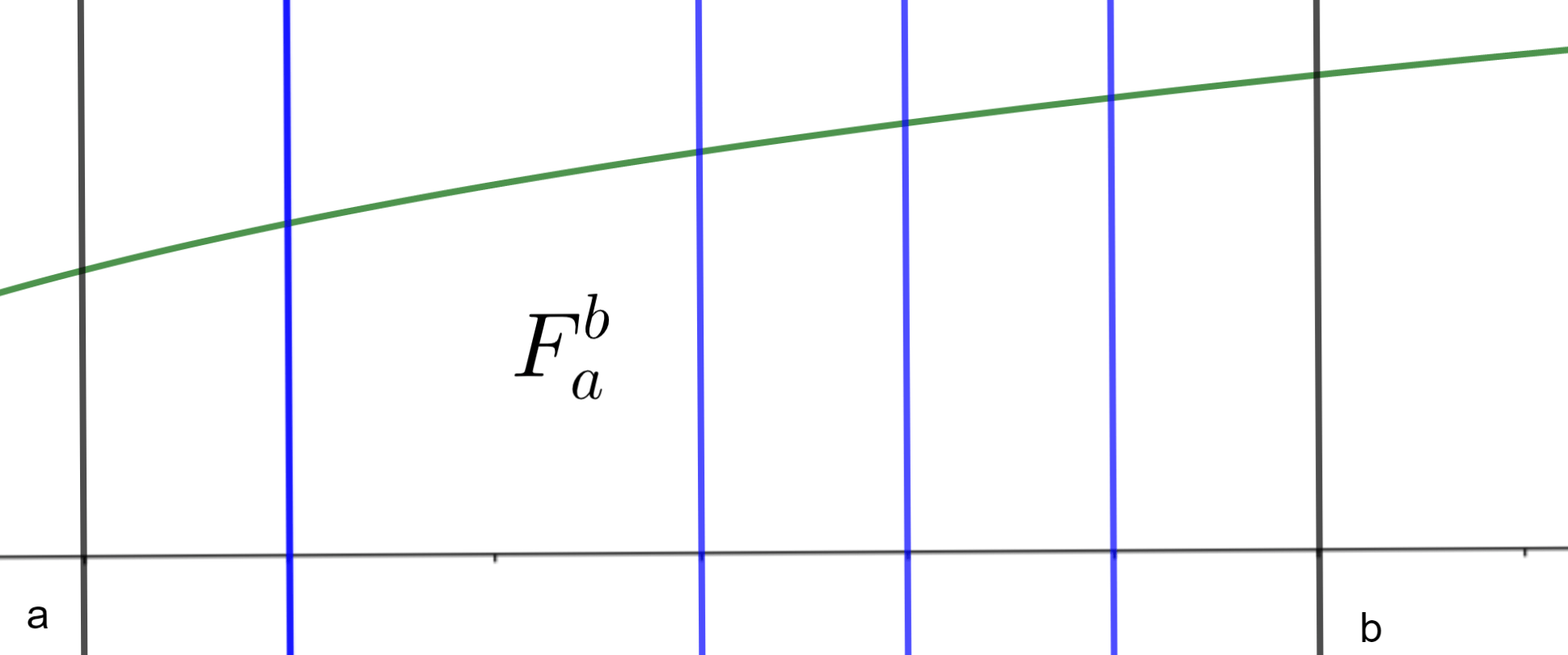
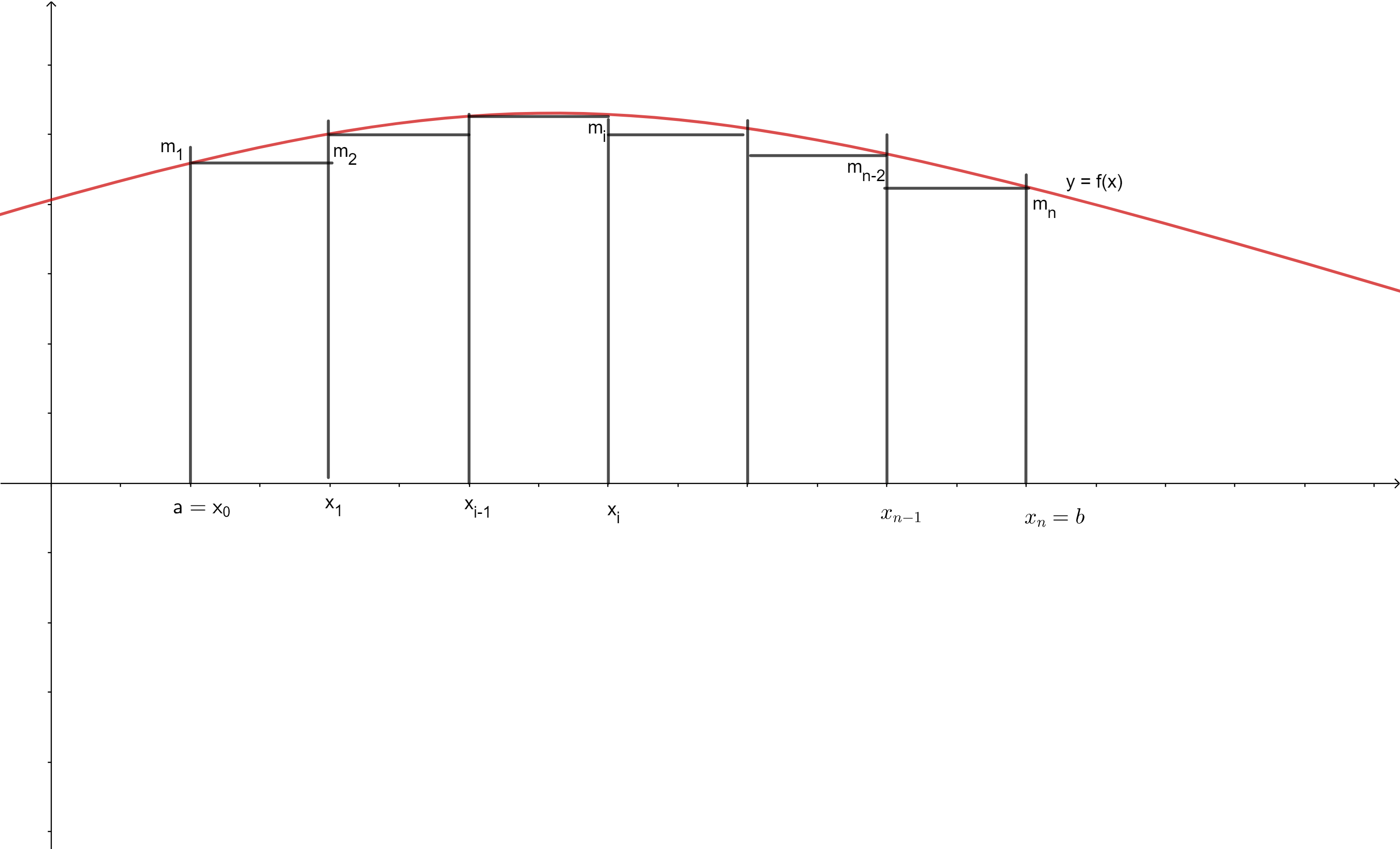
Pensemos que tomamos una partición en $n$ partes del intervalo $[a,b]$. La longitud de cada celda sería $\Delta x_i = (b-a)/n$. Si tomamos a los puntos $x_1,\ldots,x_n$, uno en cada celda de dicha partición, entonces tendríamos que
\begin{align*}
\frac{f(x_1) + f(x_2) + … + f(x_n)}{n}&=\frac{b-a}{b-a} \sum_{i=1} ^n \frac{f(x_i)}{n}\\
&=\frac{1}{b-a} \sum_{i=1}^n f(x_i) \Delta x_i.
\end{align*}
A la derecha nos queda una suma de Riemann. Si la función fuera integrable en $[a,b]$, dicha suma convergería a $\frac{1}{b-a}\int_a^b f(x)\, dx$ conforme $n\to \infty$ (como recordatorio, revisa la entrada de definición de la Integral). Y el lado izquierdo, conforme $n$ crece, se vuelve el promedio de más y más puntos distribuidos homogéneamente en $[a,b]$. De aquí sale la siguiente intuición: «la integral entre $b-a$ es el valor promedio de la función en todo el intervalo».
Esta intuición es buena y conviene formalizarla con un nombre apropiado.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función acotada e integrable en un intervalo $[a,b]$, con $a<b$ reales. Definimos el promedio de $f$ en $[a,b]$ como el número $$\frac{1}{b-a}\int_a^b f(x)\, dx.$$
Observa que podemos poner a esta expresión como un cociente de integrales:
$$\frac{1}{b-a} \int \limits_{a}^{b} f(x) \ dx = \frac{ \int \limits_{a}^{b} f(x) \ dx }{ \int \limits_{a}^{b} 1 \ dx }.$$
Teorema del valor medio para la integral
El teorema del valor medio establece una relación muy importante entre una función continua y promedio en cierto intervalo $[a,b]$.
Teorema. Sea $f:\mathbb{R}\to \mathbb{R}$ una función que es continua en el intervalo $[a,b]$, con $a\leq b$ reales. Entonces, siempre existe $\xi\in[a,b]$ tal que
$$ \int \limits_{a}^{b} f(x) dx = f(\xi)(b-a).$$
Si $b>a$, podemos dividir entre $b-a$ y esto quiere decir que siempre podemos encontrar un valor $\xi\in [a,b]$ tal que $f(\xi)$ es igual al promedio de $f$ en $[a,b]$.
Demostración. Si $a=b$, entonces no hay nada que hacer, pues en ambos lados de la igualdad tenemos cero. Así, sean $a<b$ números reales y $f:\mathbb{R}\to \mathbb{R}$ función continua dentro del intervalo $[a,b]$.
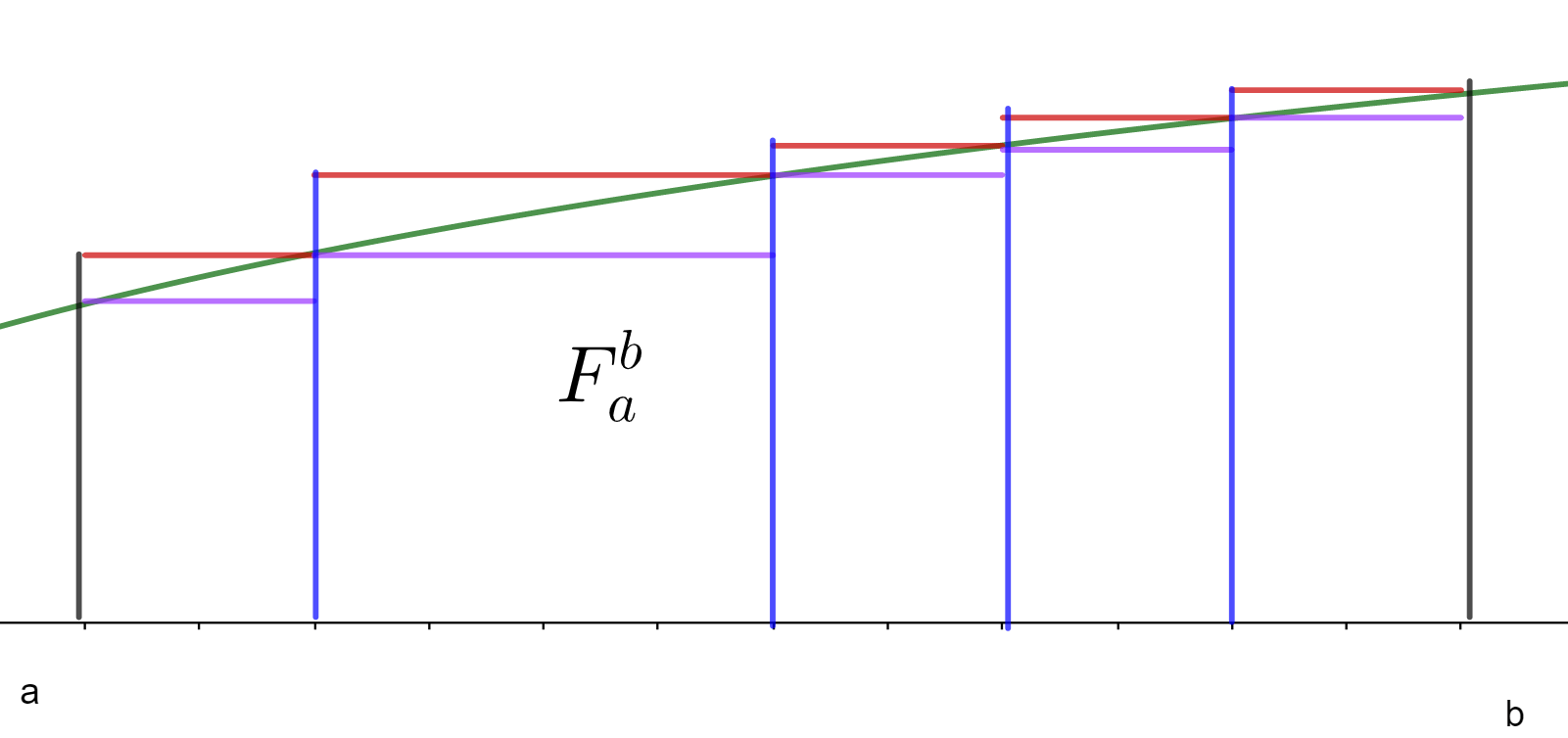
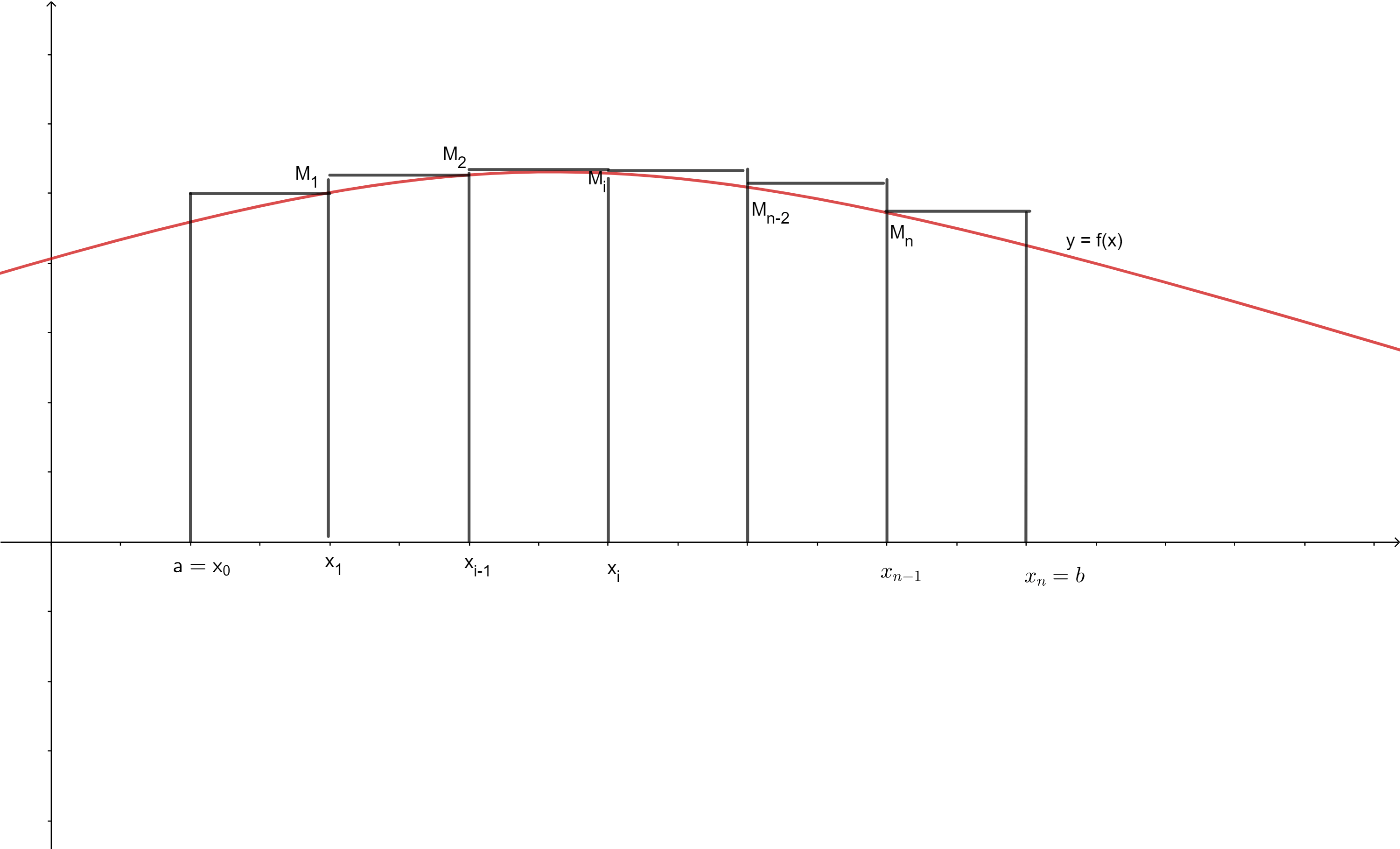
Las funciones continuas tienen valor máximo y mínimo en intervalos cerrados y acotados. Así, existen $x_0$ y $y_0$ en $[a,b]$ tales que $f(x_0) = m$ es el mínimo de la función en el intervalo y, $f(y_0) = M$ es el máximo de la función en el intervalo. Como las funciones constantes son integrables y la integral respeta desigualdades, tenemos que:
\begin{align*}
m(b \ – \ a) &= f(x_0) (b \ – \ a)\\
&=\int_a^b f(x_0)\, dx\\
&\leq \int_a^b f(x)\, dx\\
&\leq \int_a^b f(y_0)\, dx\\
&=f(y_0) (b-a)\\
&=M (b-a).
\end{align*}
Nos importa recuperar de esta cadena de desigualdades que $$m(b-a)\leq \int_a^b f(x)\, dx \leq M(b-a),$$ y por lo tanto $$m\leq \frac{1}{b-a} \int_a^b f(x)\, dx \leq M.$$
De esta manera, $\frac{1}{b-a} \int_a^b f(x)$ es un valor entre $f(x_0)$ y $f(y_0)$. Pero por el teorema del valor intermedio, si una función continua toma dos valores, entonces toma cualquier valor entre ellos. Así, existe $\xi$ entre $x_0$ y $y_0$ tal que $$f(\xi)=\frac{1}{b-a} \int_a^b f(x)\, dx.$$
Multiplicando por $b-a$, obtenemos la igualdad deseada.
$ \square$
Para entender un poco mejor el teorema del valor medio para la integral, veamos un ejemplo.
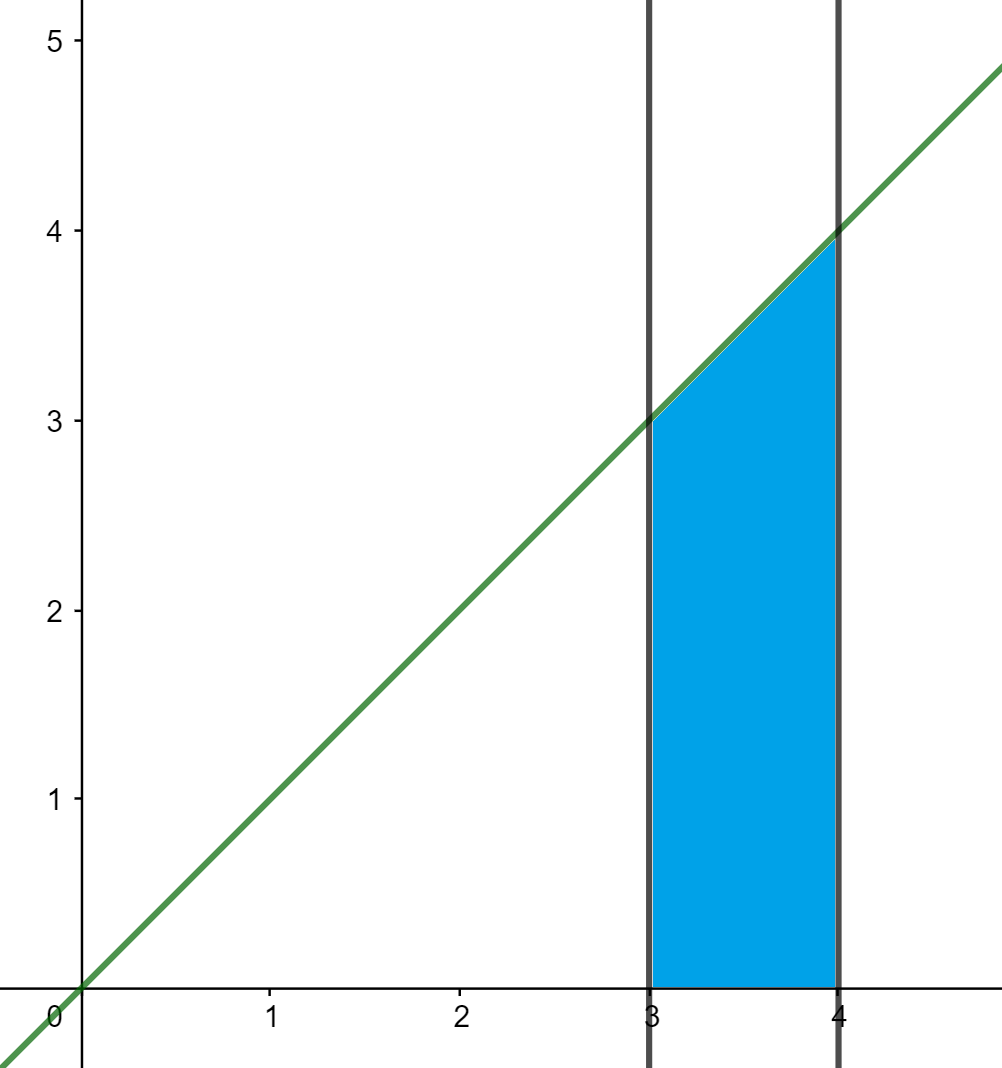
Ejemplo. Veamos el teorema del valor medio en acción para la función $f(x)=x$ en el intervalo $[3,4]$.
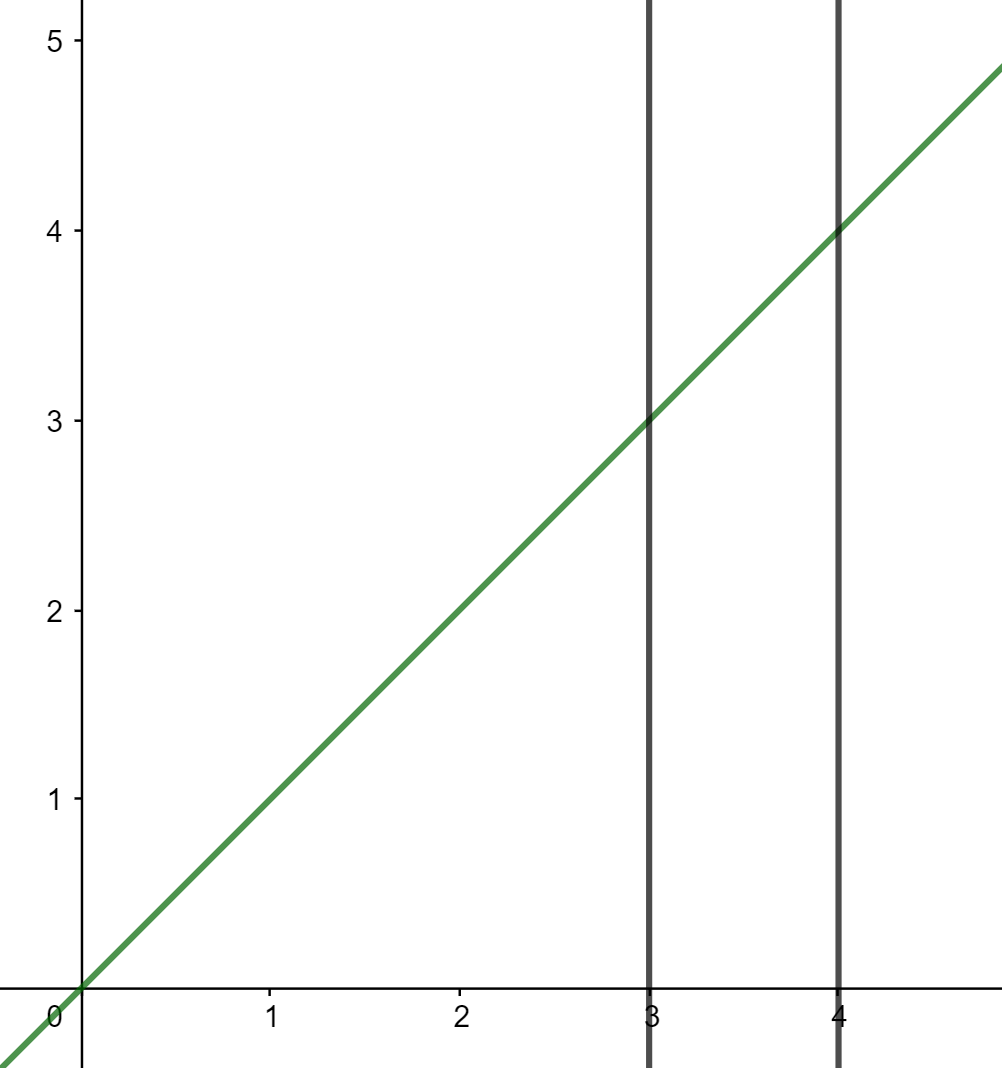
Ya habíamos encontrado el valor de esta integral en la entrada «Definición de la Integral Definida». Dicho valor fue $\frac{7}{2}=3.5$.
Lo que nos diría el teorema del valor medio es que podemos encontrar un punto $\xi \in[3,4]$ tal que Sustituyendo en la expresión encontrada por el teorema, se tiene lo siguiente.
$$f(\xi)(4 \ – \ 3) = \int \limits_{3}^{4} f(x) dx=3.5,$$
es decir, tal que $f(\xi)=3.5$. Y en efecto, dicho punto es justamente $3.5$, pues $f(3.5)=3.5$. Notemos que, tal como se quería, tenemos que $3.5\in [3,4]$. Por lo tanto, el punto $\xi = 3.5 $ dentro del intervalo $[3,4]$ es tal que al evaluarlo en la función, da por resultado el promedio de $f$ en $[3,4]$.
$\triangle$
Teorema del valor medio generalizado para la integral
Hay otra versión del teorema del valor medio que generaliza la noción de promedio. Quizás en tu educación básica cursaste una materia en donde el $30\%$ de tu calificación eran tareas, el $20\%$ era participaciones y el $50\%$ el examen. En este caso, si sacaste $x,y,z$ en las tareas, participaciones y examen respectivamente, entonces tu calificación final era $0.3 x + 0.2 y + 0.5 z$. Este tipo de promedios en donde distintos números tienen distinto valor quedan reflejados en la siguiente definición.
Definición. Sean $z_1,\ldots,z_n$ números reales y $p_1,\ldots,p_n$ números positivos. La media aritmética ponderada con dichos pesos es el número real $$\frac{p_1z_1+p_2z_2+\ldots+p_nz_n}{p_1+p_2+\ldots+p_n}.$$
El promedio se recupera eligiendo todos los pesos $p_i$ iguales a $1$, es decir, dando la misma ponderación para todos los valores que tenemos dentro del conjunto, independientemente del valor que hayan tenido. Las medias aritméticas son importantes pues aparecen en las aplicaciones. Por ejemplo, en física podemos pensar que los $p_i$ son pesos de partículas localizadas en los puntos $z_i$. En este caso la media aritmética ponderada representará el centro de gravedad de dichos objetos.
Estas ideas pueden llevarse al contexto continuo. Se pueden pensar en las ideas del teorema del valor medio, pero donde ahora en cada punto ponderaremos de acuerdo a una función peso. Esto hará que ahora distintos puntos tengan distinta preferencia, y que a su vez ya no se tenga una media aritmética, sino una media aritmética ponderada.
Definición. Sea $f:\mathbb{R}\to \mathbb{R}$ una función integrable en $[a,b]$ y sea $p:\mathbb{R}\to \mathbb{R}$ una función integrable en $[a,b]$ y no negativa, con integral positiva. Definimos el promedio ponderado de $f$ como el número
$$\frac{\int_a^b f(x) p(x) \, dx}{\int_a^b p(x)\, dx}.$$
Se puede demostrar el siguiente teorema, que generaliza al teorema del valor medio para la integral.
Teorema. Sea $f:\mathbb{R}\to \mathbb{R}$ una función continua en $[a,b]$ y sea $p:\mathbb{R}\to \mathbb{R}$ una función continua en $[a,b]$ y no negativa, con integral positiva. Entonces existe un valor $\xi\in [a,b]$ tal que:
$$\int \limits_{a}^{b} f(x) \ p(x) \ dx = f(\xi) \ \int \limits_{a}^{b} p(x) \ dx .$$
Observación. Si $p(x)$ es la función constante $1$, recuperamos el teorema del valor medio para la integral.
Ya tienes todas las herramientas para probar esta generalización. ¡Te espera en los problemas!
Más adelante…
A partir de la definición de la integral mediante sumas se obtienen teoremas y propiedades que nos permiten simplificar el cálculo de la integral y tener herramientas para resolver problemas mediante diferentes métodos.
Este teorema nos permite calcular la integral a partir del punto medio del intervalo, simplificando el proceso ya que no es necesario determinar el ínfimo o el supremo de cada partición.
Un poco después veremos algunas aplicaciones de este teorema. Será de suma importancia cuando enunciemos y mostremos los teoremas fundamentales del cálculo.
Tarea moral
- Encuentra el valor promedio la función dada, en el intervalo dado. Luego, encuentra un valor $\xi$ en el intervalo dado tal que $f(\xi)$ sea la integral que encontraste.
- $f(x)=1 + x^2$ en $[-1,2]$.
- $f(x)=\sqrt x$ en el intervalo $[0,4]$.
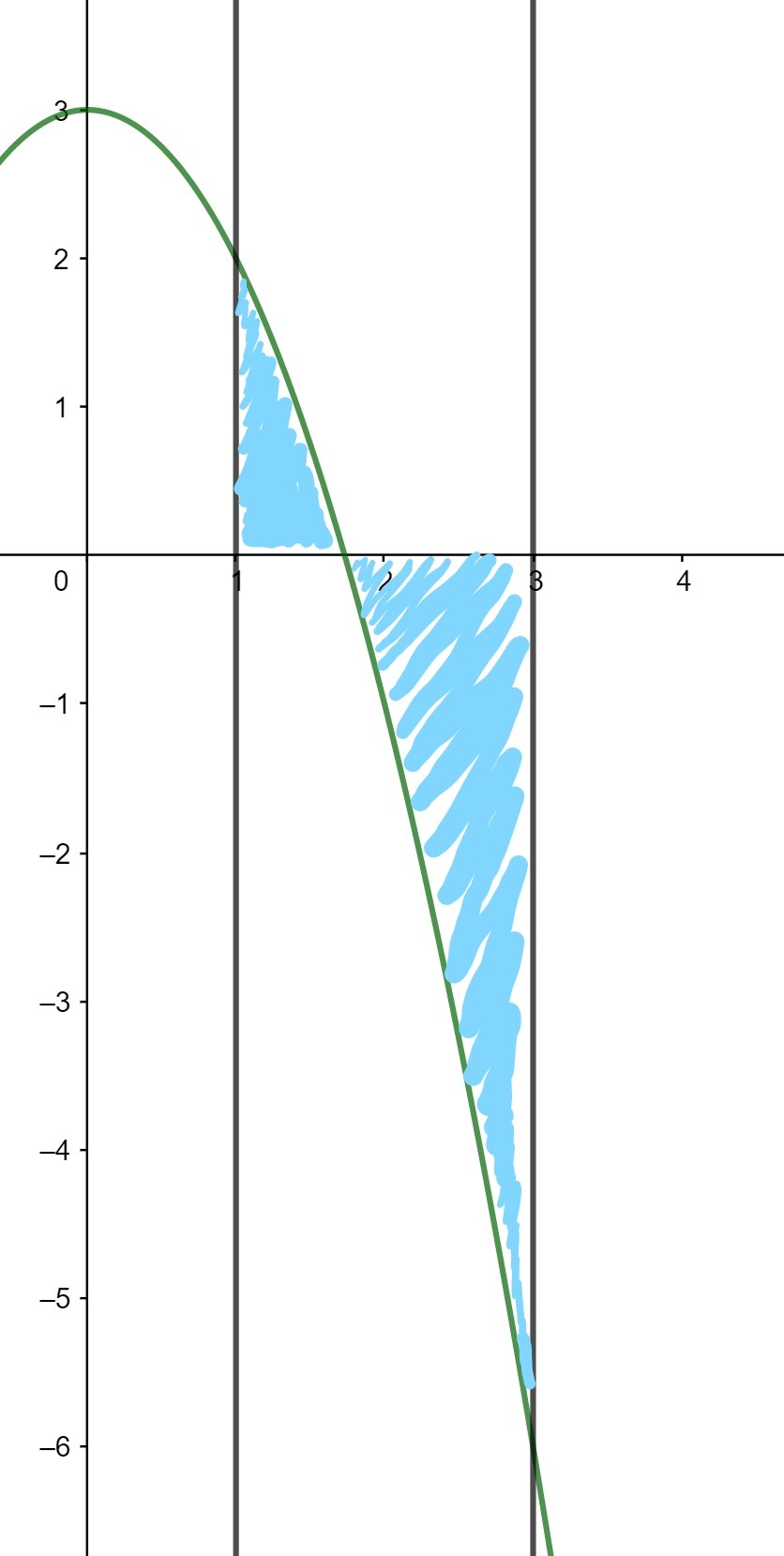
- $f(x)=1+2x-x^2$ en el intervalo $[-2,2]$.
- Determina el valor promedio ponderado de las siguientes funciones, usando la función ponderación dada.
- $f(x)=1+x^2$ en $[-1,2]$, con función ponderación $p(x)=x+1$.
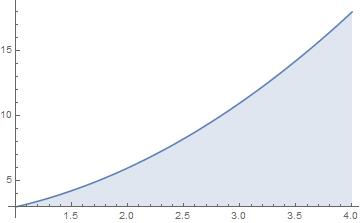
- $f(x)=4x^2 – 2x$ en $[1,4]$, con función ponderación $p(x)=3$.
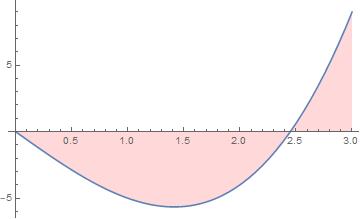
- $f(x)=(x-3)^2$ en en $[2,5]$, con función ponderación $p(x)=x-2$.
- Demuestra el teorema del valor medio generalizado para la integral.
- El teorema del valor medio es falso en general si la función no es continua. Considera la siguiente función $$f(x)=\begin{cases} 0 & \text{si $x\in [0,1]$}\\ 1 & \text{si $x\in[1,3].$}\end{cases}$$
- Demuestra que esta función es integrable en $[0,3]$.
- Encuentra explícitamente el valor de esa integral mediante la definición.
- Muestra que no existe ningún $\xi\in [0,3]$ tal que $f(\xi)=\frac{1}{3-0} \int_a^b f(x)\, dx.$
- Sea $f:\mathbb{R}\to\mathbb{R}$ una función continua y tal que $f(x)\geq 3$ para todo $x$ en cierto intervalo $[a,b]$. Demuestra que si el promedio de $f$ en $[a,b]$ es $3$, entonces $f(x)=3$ para todo $x\in [a,b]$. ¿Fue importante que el número fuera $3$? Enuncia y demuestra una generalización.
Entradas relacionadas
- Página del curso: Cálculo Diferencial e Integral II
- Entrada anterior: Propiedades de la integral definida
- Entrada siguiente: Funciones integrables con finitas discontinuidades