Introducción
Como ya podrás haber notado, identificar la compacidad en un espacio métrico es una situación recurrente y de interés en cursos de Análisis. Naturalmente han surgido resultados que permiten identificarla con mayor facilidad en conjuntos cuya métrica no es tan sencilla de manejar, como los espacios de funciones.
En esta entrada veremos un teorema útil para trabajar en el espacio $\mathcal{C^0}(X,Y)$ donde $X$ es compacto y $Y$ es completo. Primero veamos si el siguiente conjunto de funciones es compacto.
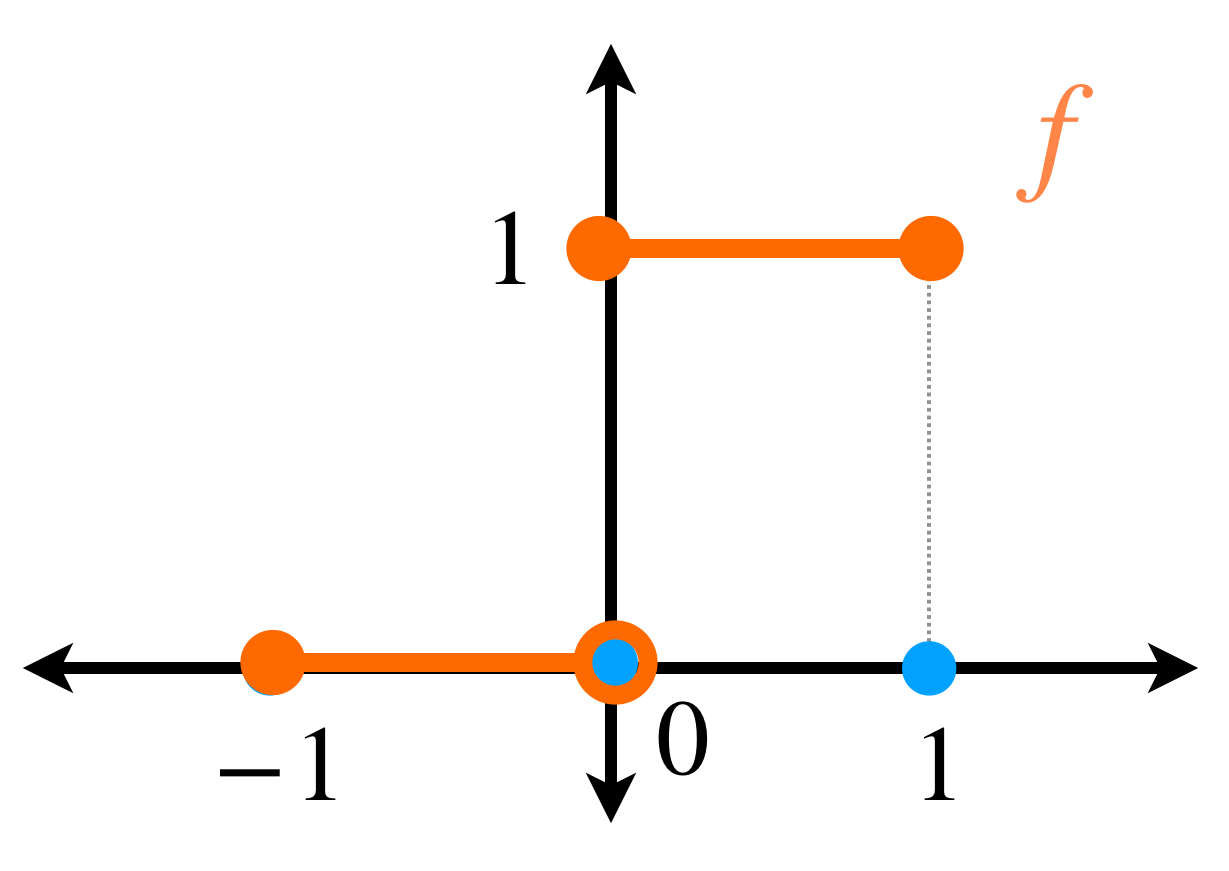
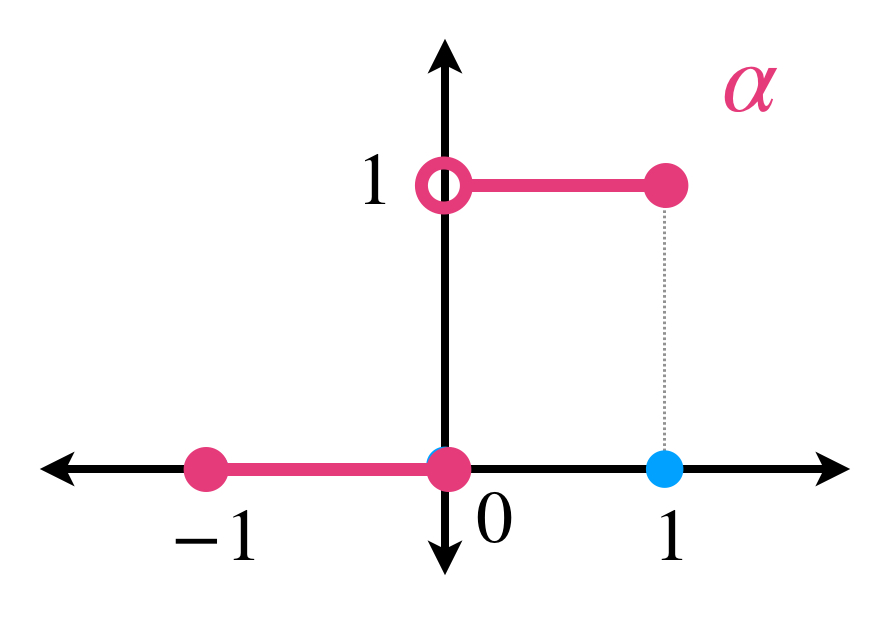
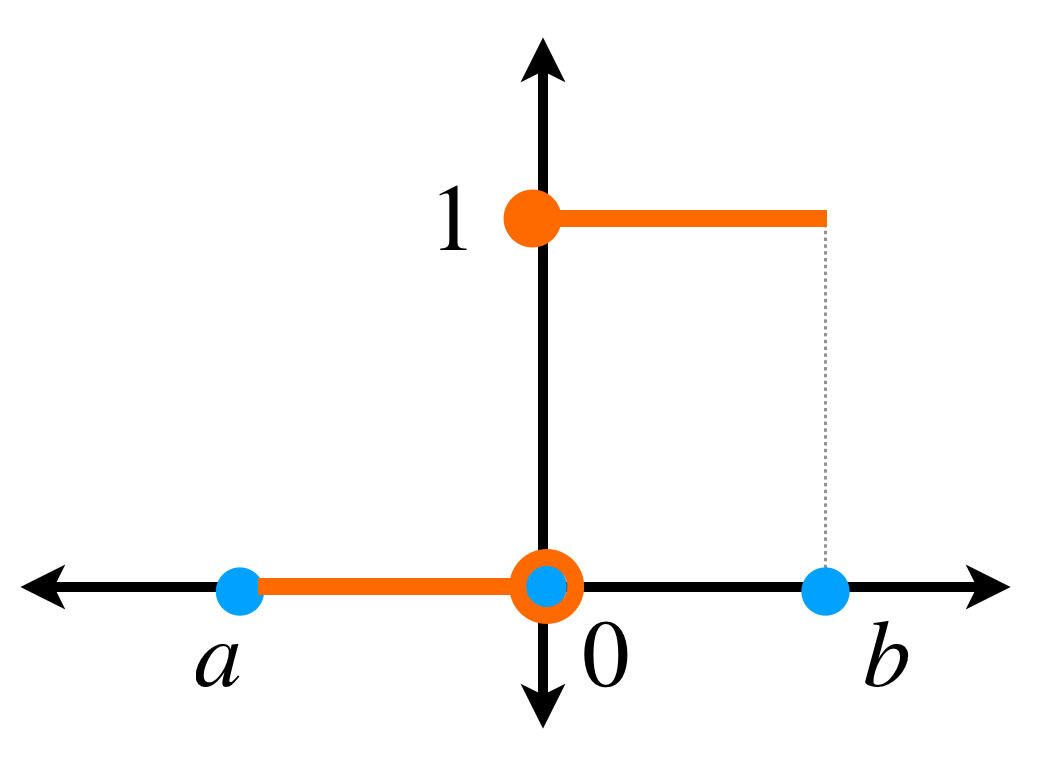
Para cada $n \in \mathbb{N}$ considera la función $f_n:[0,2] \to \mathbb{R}$ dada por
\begin{equation*}
f_n(x):=\begin{cases} 1 -n^2|x-\frac{1}{n}|, \, &\text{si $|x-\frac{1}{n}|<\frac{1}{n^2}$}\\
\\
0 \, &\text{en otro caso}
\end{cases}
\end{equation*}
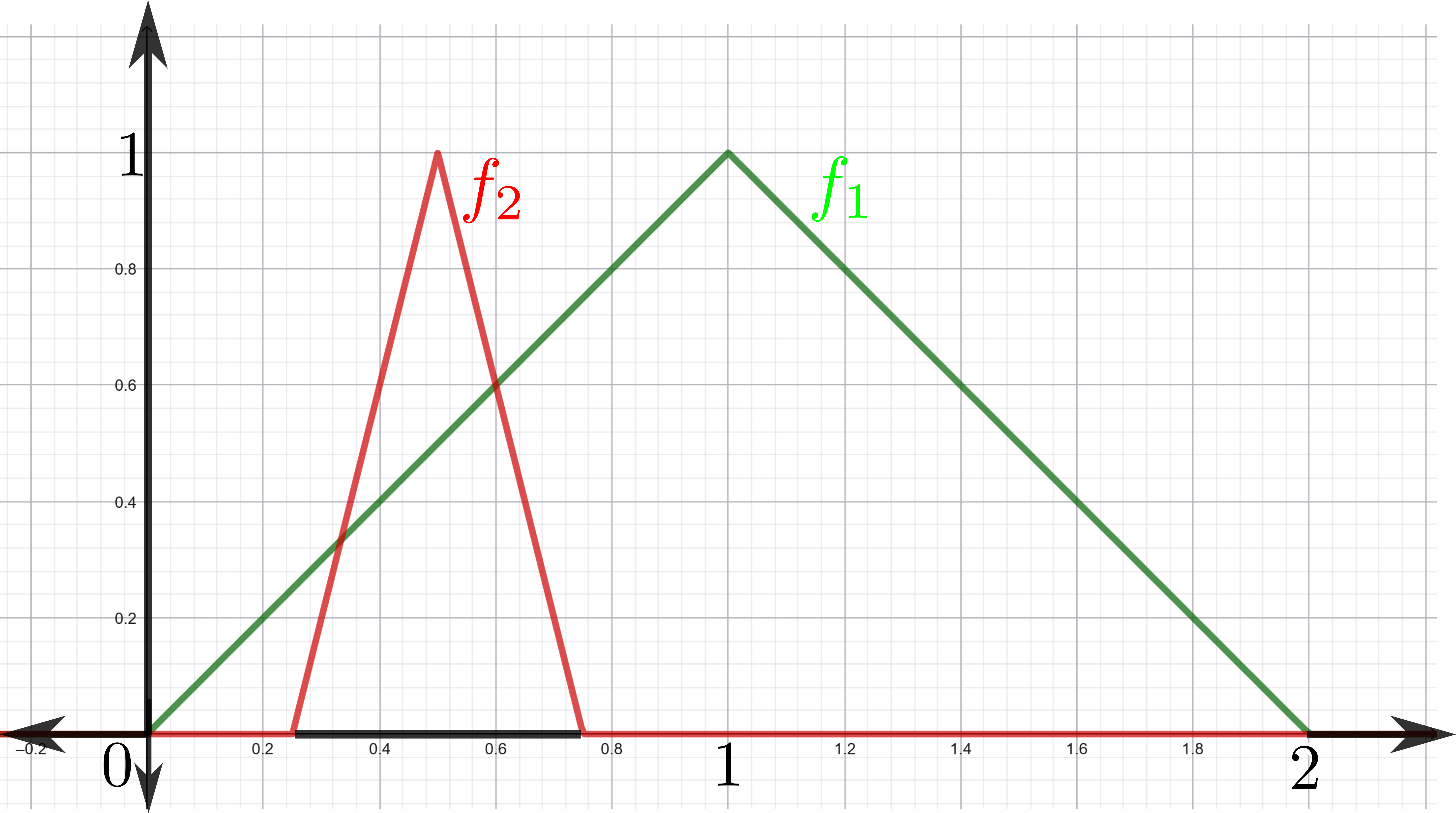
La familia de funciones $\mathcal{H}:= \{f_i \, | \, i \in \mathbb{N}\}$ no es compacta en el espacio $\mathcal{C}^0[0,2]$ porque no es totalmente acotada: Es sencillo ver que para cualesquiera dos funciones $f_l, f_m \in \mathcal{H}$ con $l \neq m,$ se cumple que $d_{\infty}(f_l,f_m)=1.$ De modo que no es posible cubrir $\mathcal{H}$ con una cantidad finita de bolas abiertas de radio $\frac{1}{2}.$ Esto se debe a que cualquier bola abierta $B(f, \frac{1}{2}) \subset \mathcal{C}^0[0,2]$ tiene a lo más un elemento de $\mathcal{H}:$ Si $f_l, f_m \in B(f, \frac{1}{2})$ se cumple que $d_{\infty}(f_l,f_m) \leq d_{\infty}(f_l,f)+d_{\infty}(f,f_m) < \frac{1}{2}+\frac{1}{2}= 1$ lo cual es una contradicción a la distancia entre ambas funciones. En consecuencia no será posible cubrir todos los elementos de $\mathcal{H}$ con una cantidad finita de bolas por lo que $\mathcal{H}$ no será totalmente acotado.
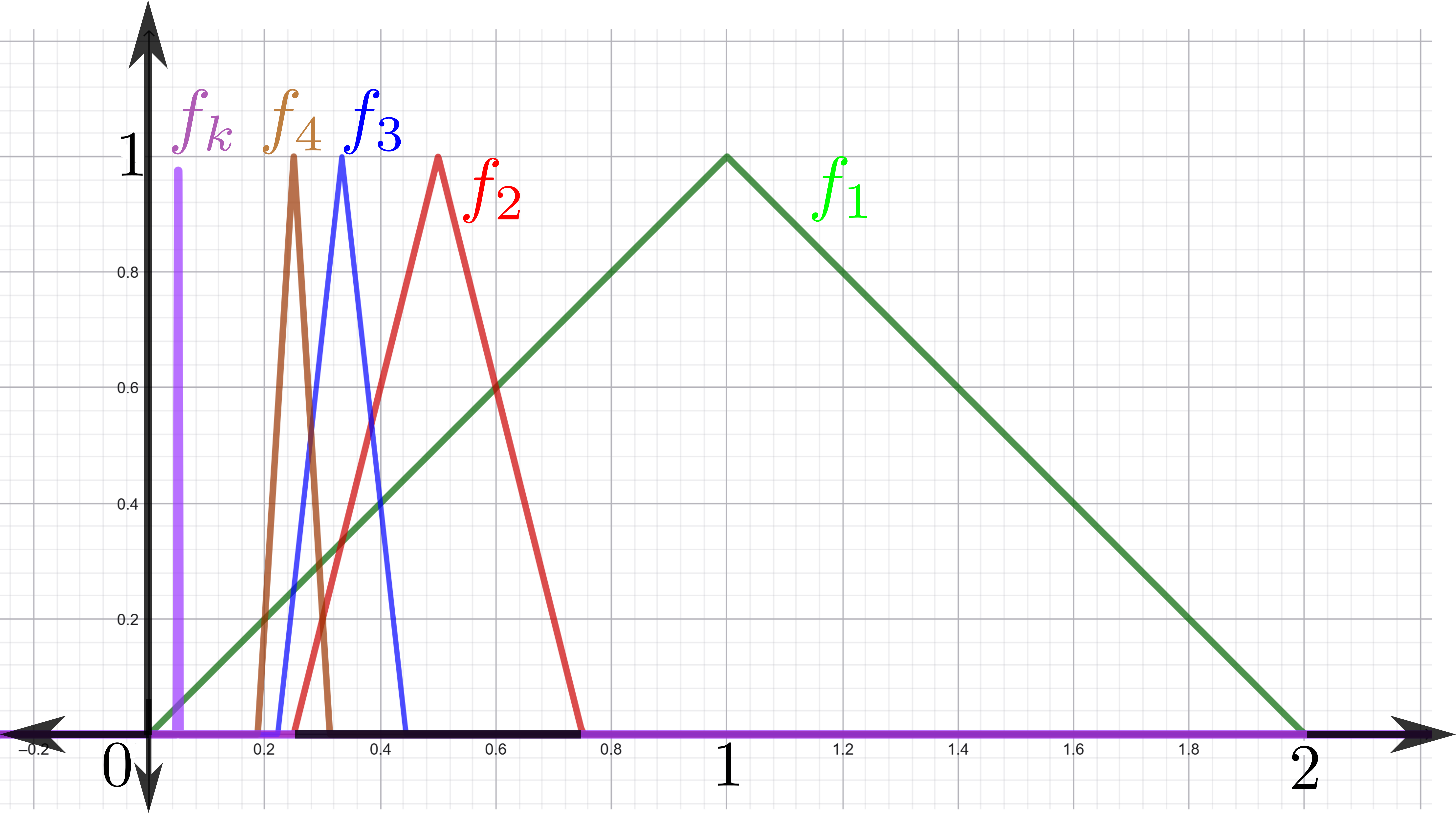
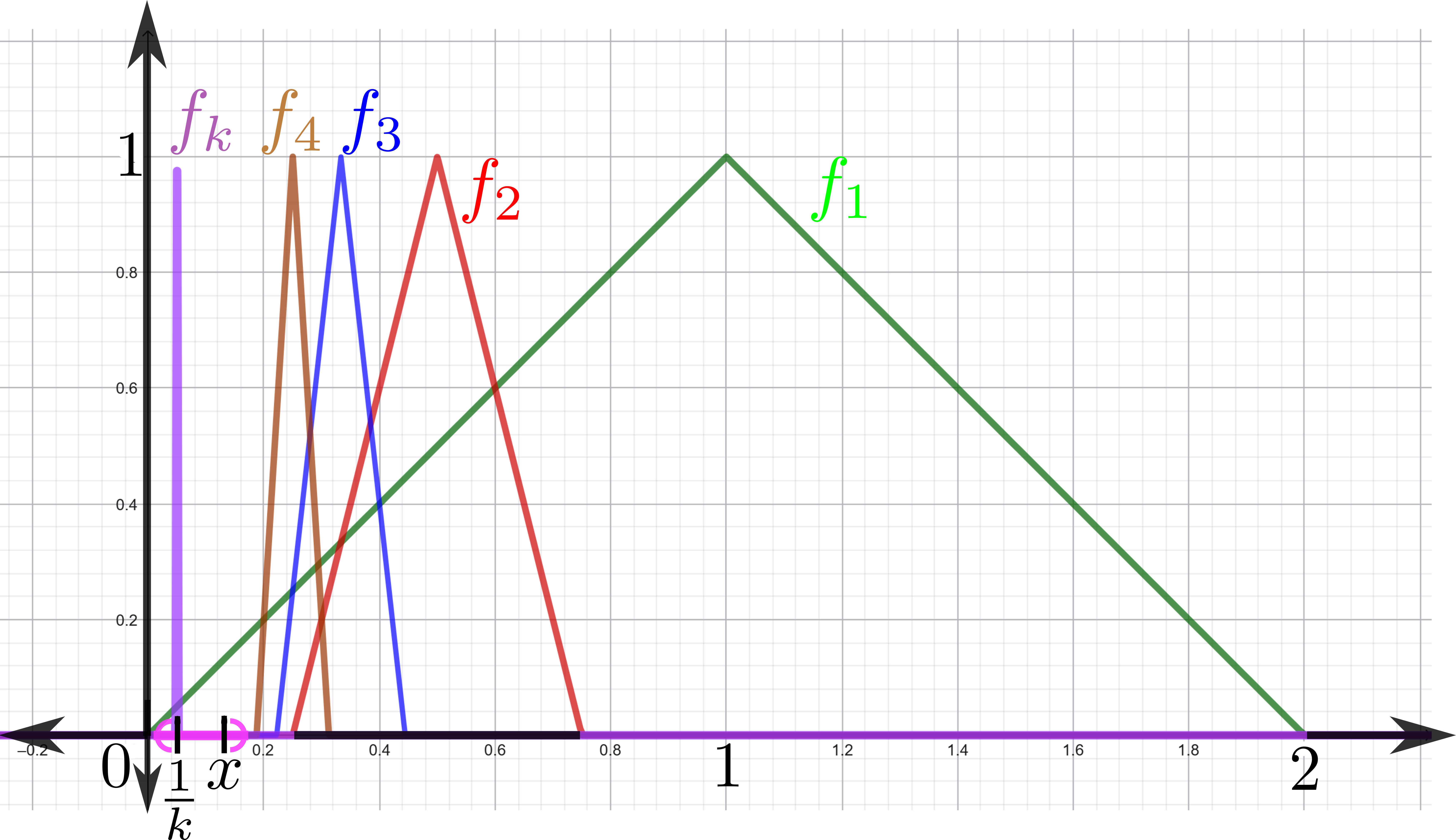
Las características de esta familia de funciones nos impiden «atraparlas» en bolitas pequeñitas. Como la distancia entre funciones está en función de las distancias en puntos del codominio, necesitaremos propiedades que restrinjan el comportamiento de alguna manera. Una propiedad que lo logra es, como vimos en la entrada anterior, la equicontinuidad en funciones. Puedes observar que $\mathcal{H}$ no es equicontinua, pues para $\varepsilon = \frac{1}{2}$ no existe ningún valor de $\delta$ que funcione. Conforme $n \to \infty$ la gráfica de las funciones genera un pico que sube y baja rápidamente en un intervalo, de tamaño $\frac{2}{n^2},$ que también se va haciendo más pequeño. Siempre será posible elegir una función donde el tamaño del intervalo es menor que $\delta.$ Habrá un punto $x$ y una función $f_k$ tal que $|x- \frac{1}{k}|< \delta$ pero $|f_k(x)-f_k(\frac{1}{k})| =|0-1|=1> \frac{1}{2}.$
¿Bastará la equicontinuidad de una familia de funciones para que esta sea compacta? No es así. Presentamos una familia de funciones equicontinuas que no es totalmente acotada.
Tomaremos funciones del espacio $\mathcal{C}^0([0,1],\ell_2).$ Donde $[0,1]$ es compacto y $\ell_2$ es completo. La prueba de esto puede consultarse en Bracamonte, M. R. (2024, 11 de octubre). lp es un espacio de Banach [Video]. YouTube.youtube.com.
Para cada $n \in \mathbb{N}$ y $x \in [0,1]$ sea $f_n(x):= e_n,$ donde $e_n$ es la sucesión que toma valor $1$ en la entrada i-ésima y $0$ en el resto. Entonces la familia $\mathcal{H}:= \{f_n \, | \, n \in \mathbb{N}\}$ es equicontinua pues, para todo $\varepsilon >0,$ (sin importar el valor de $\delta),$ para cualesquiera $x,y \in [0,1]$ se cumplirá para cualquier $f_n \in \mathcal{H}$ que $\norm{f_n(x)-f_n(y)}_2= \norm{e_n-e_n}_2 = 0 < \varepsilon.$
No obstante, esta familia no es totalmente acotada: Para cualesquiera dos funciones en $\mathcal{H},$ digamos $f_l, f_m, l \neq m$ tenemos que $d_{\infty}(f_l,f_m) = \norm{e_l-e_m}_2 = \sqrt{|1|^2+|1|^2} = \sqrt{2}.$ En consecuencia, no será posible cubrir $\mathcal{H}$ con una cantidad finita de bolas abiertas de radio $\frac{\sqrt{2}}{2}$ por lo que esta familia no es totalmente acotada.
Esta vez no bastó la equicontinuidad, incluso con funciones tan «estables» que son constantes. La falla radicó en que, al variar la función en la que evaluamos un punto $x$ del dominio, el conjunto dado por las imágenes de $\{x\}$ no es relativamente compacto.
Ahora veremos las condiciones necesarias y suficientes que debe tener una familia de funciones para ser relativamente compacta:
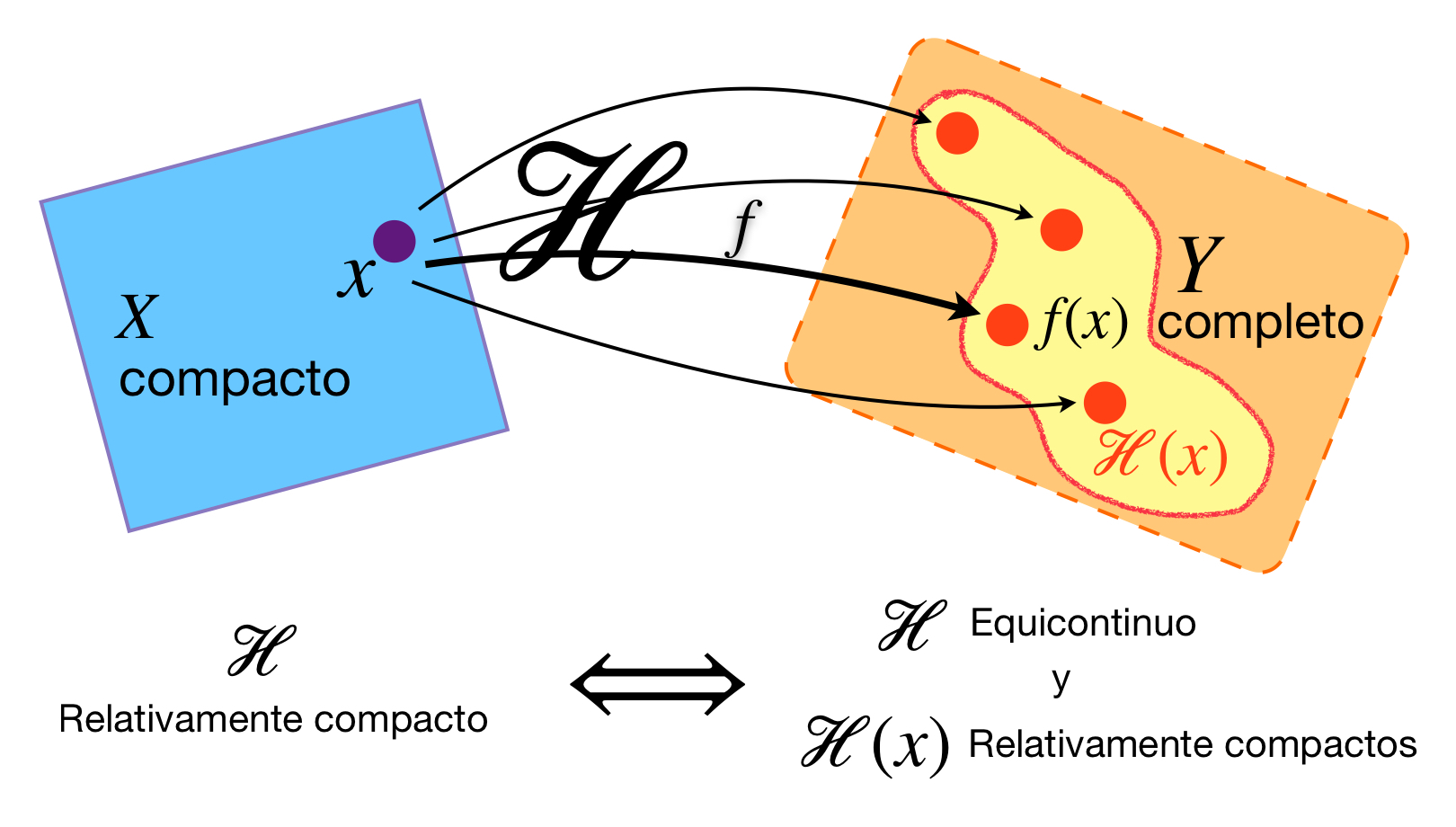
Teorema Arzelá-Ascoli. Sean $X$ un espacio métrico compacto y $Y$ un espacio métrico completo. Un subconjunto $\mathcal{H}$ de $\mathcal{C^0}(X,Y)$ es relativamente compacto en el espacio $\mathcal{C^0}(X,Y)$ si y solo si $\mathcal{H}$ es equicontinuo y los conjuntos definidos como $\mathcal{H}(x):= \{f(x) \, | \, f \in \mathcal{H}\}$ son relativamente compactos en $Y$ para cada $x \in X.$
Demostración:
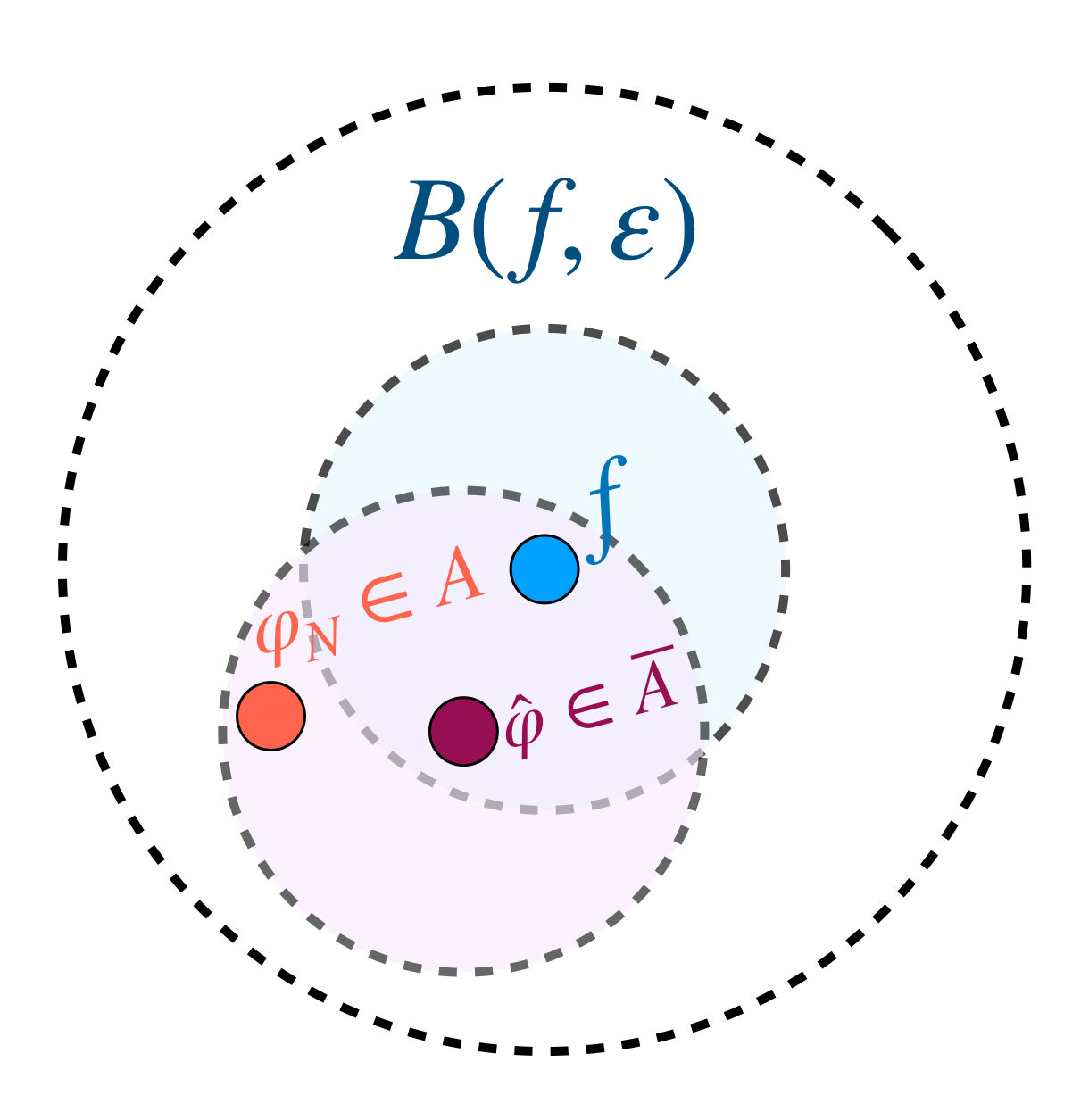
En Convergencia uniforme y continuidad concluimos que por las propiedades de $X$ y $Y, \,$ $\mathcal{C^0}(X,Y)$ es completo, así por lo visto en conjuntos relativamente compactos y totalmente acotados sabemos que como $\mathcal{H}$ es relativamente compacto en $\mathcal{C^0}(X,Y),$ esto implica que $\mathcal{H}$ es totalmente acotado.
Sea $\varepsilon >0.$ Existen funciones $g_1, \, g_2,…,g_m \in \mathcal{H}$ tales que
\begin{align}
\mathcal{H} \subset B_\infty \left(g_1, \, \frac{\varepsilon}{3} \right) \cup B_\infty \left(g_2, \, \frac{\varepsilon}{3} \right) \cup … \cup B_\infty \left(g_m, \, \frac{\varepsilon}{3} \right).
\end{align}
Donde $B_\infty$ denota bolas abiertas con la métrica uniforme en $\mathcal{C^0}(X,Y)$
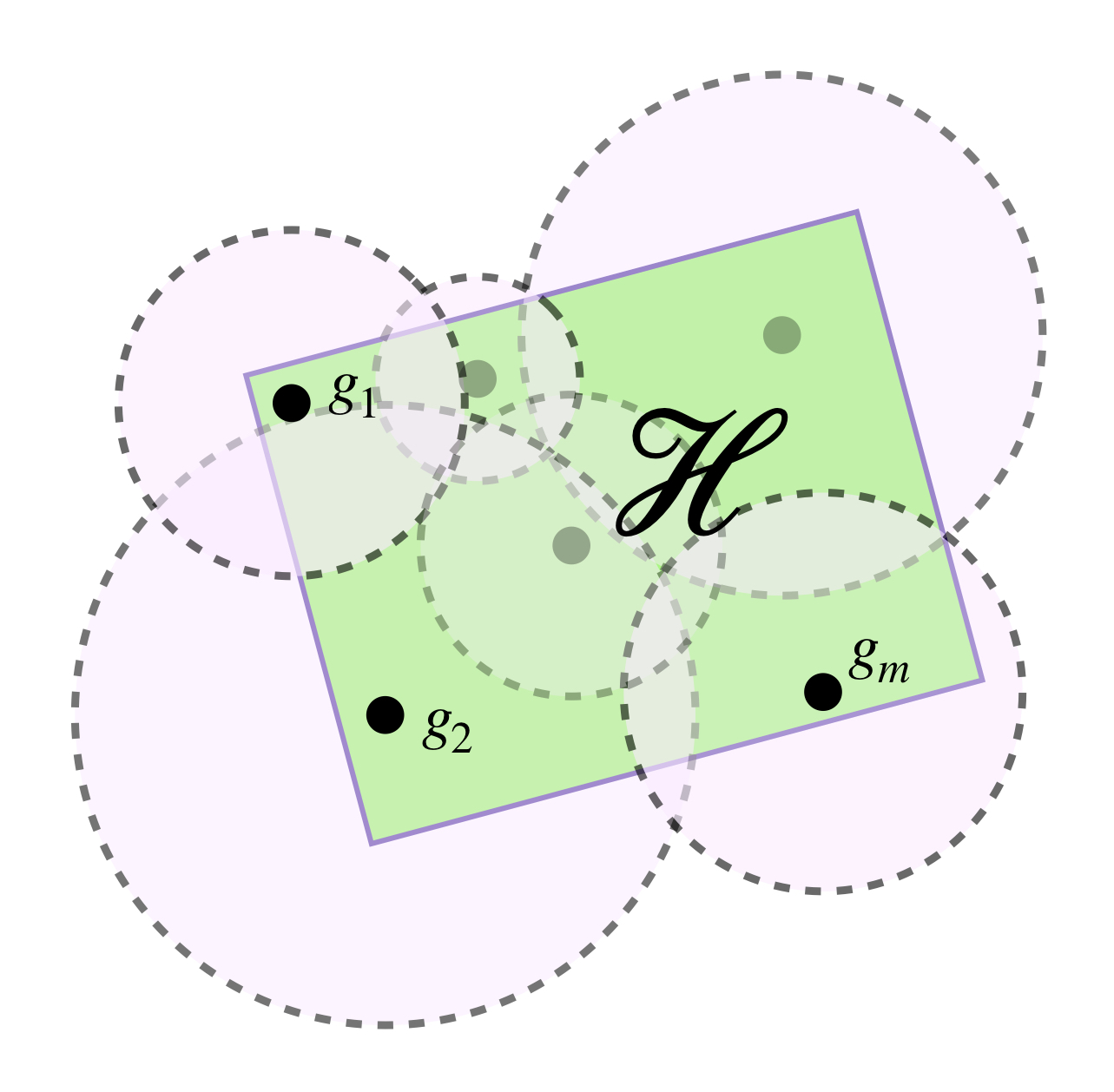
Esto significa que cualquier función de $\mathcal{H}$ se aproxima mucho a alguna $g_i, \, i \in \{1,2,..,m\}.$ Sea $x \in X.$ Considera el conjunto
$$\mathcal{H}(x):= \{f(x) \, | \, f \in \mathcal{H}\}$$
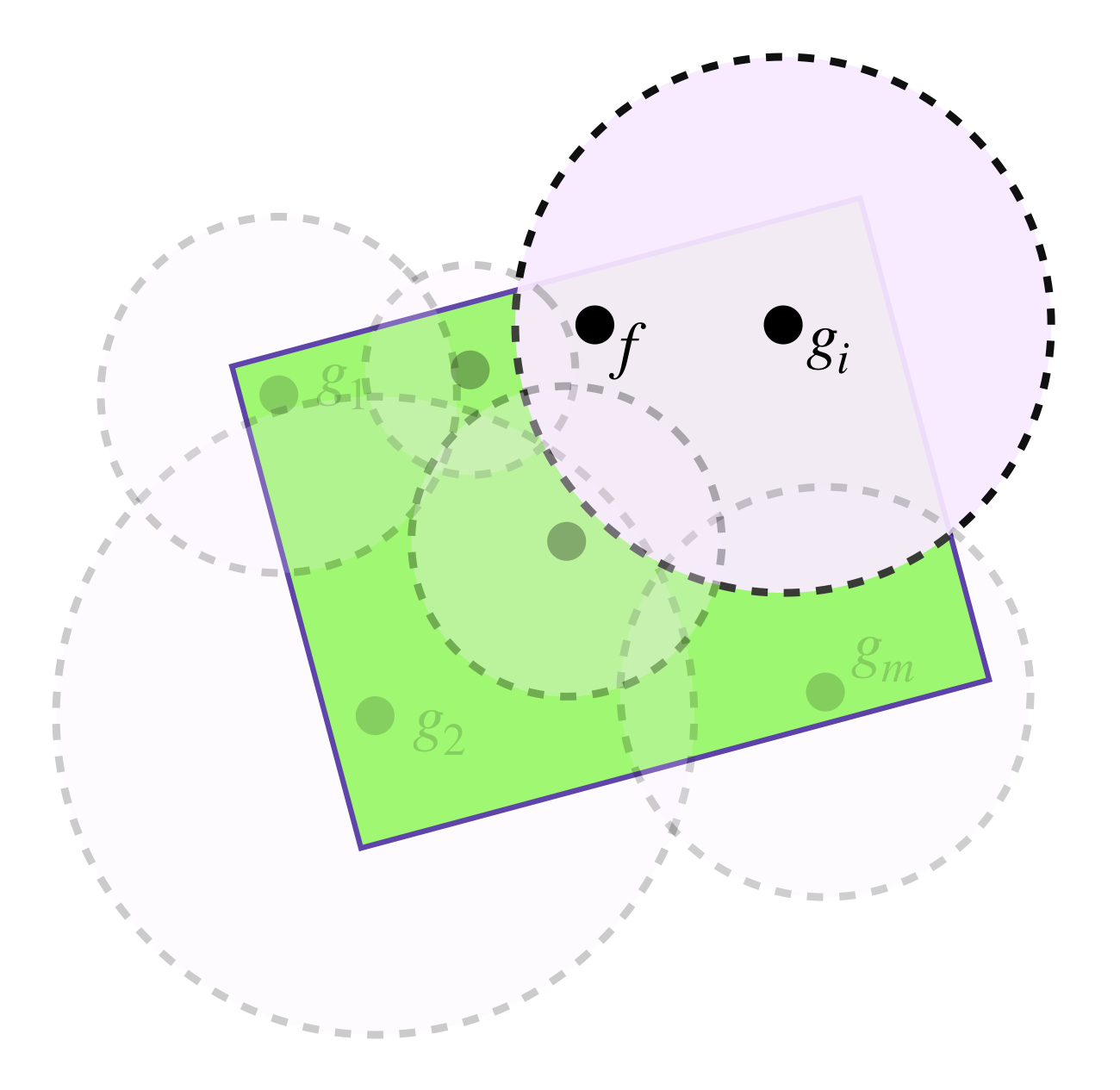
Dado un $f(x) \in \mathcal{H}(x),$ por (1) sabemos que existe $i \in \{1,2,..,m\}$ tal que la función $f \in B_\infty \left(g_i, \, \frac{\varepsilon}{3} \right).$
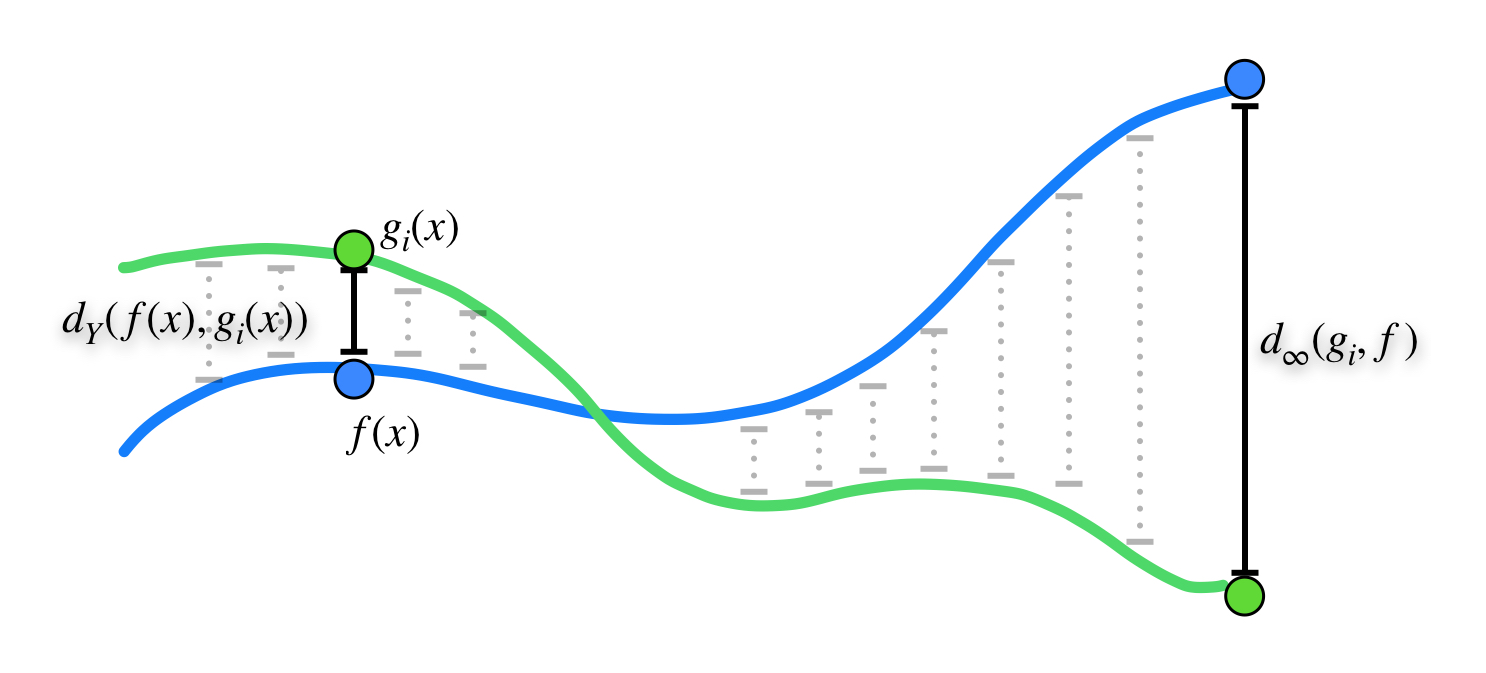
De modo que $d_\infty (g_i,f) < \frac{\varepsilon}{3}. $ En particular para $x$ se cumple que $d_Y(g_i(x),f(x)) < \frac{\varepsilon}{3}$ por lo tanto
$$f(x) \in B_Y \left( g_i(x), \, \frac{\varepsilon}{3} \right)$$
De donde se sigue
\begin{align}
\mathcal{H}(x) \subset B_Y \left( g_1(x), \, \frac{\varepsilon}{3} \right) \cup B_Y \left( g_2(x), \, \frac{\varepsilon}{3} \right) \cup … \cup B_Y \left( g_m(x), \, \frac{\varepsilon}{3} \right)
\end{align}
lo que significa que $\mathcal{H}(x)$ es totalmente acotado. Como $Y$ es completo se sigue por la equivalencia de conjuntos relativamente compactos y totalmente acotados que $\mathcal{H}(x)$ es relativamente compacto en $Y.$
Para probar que $\mathcal{H}$ es equicontinuo tomemos en cuenta que $X$ es compacto y por lo visto en la entrada Continuidad uniforme sabemos que cada $g_i$ es uniformemente continua en $X.$ Entonces cada $g_i$ tiene su respectiva $\delta_i >0$ tal que para cualesquiera $x,z \in X,$ si $d_X(x,z)< \delta_i$ entonces
$$d_Y(g_i(x),g_i(z)) < \frac{\varepsilon}{3.}$$
Sea $\delta := min \{\delta_1,…,\delta_m\}.$
Sea $f \in \mathcal{H}.$ Dicho lo anterior y recordando que existe $i \in \{1,2,..,m\}$ tal que $f \in B_\infty \left(g_i, \, \frac{\varepsilon}{3} \right),$ tenemos que si $d_X(x,z) < \delta$ entonces
\begin{align}
\nonumber d_Y(f(x),f(z)) &\leq d_Y(f(x),g_i(x)) + d_Y(g_i(x),g_i(z))+ d_Y(g_i(z),f(z)) \\
\nonumber &< \frac{\varepsilon}{3}+\frac{\varepsilon}{3}+\frac{\varepsilon}{3} \\
&= \varepsilon
\end{align}
lo cual prueba que $\mathcal{H}$ es equicontinuo.
A continuación probaremos el regreso. Tengamos presentes las ideas: suponemos que $\mathcal{H}$ es equicontinuo y para cada $x \in X,$ los conjuntos definidos como $\mathcal{H}(x):= \{f(x) \, | \, f \in \mathcal{H}\}$ son relativamente compactos en $Y.$ Buscamos demostrar que $\mathcal{H}$ de $\mathcal{C^0}(X,Y)$ es relativamente compacto en el espacio $\mathcal{C^0}(X,Y).$
Dado que $\mathcal{C^0}(X,Y)$ es completo, por la equivalencia de conjuntos relativamente compactos y totalmente acotados basta con probar que $\mathcal{H}$ es totalmente acotado.
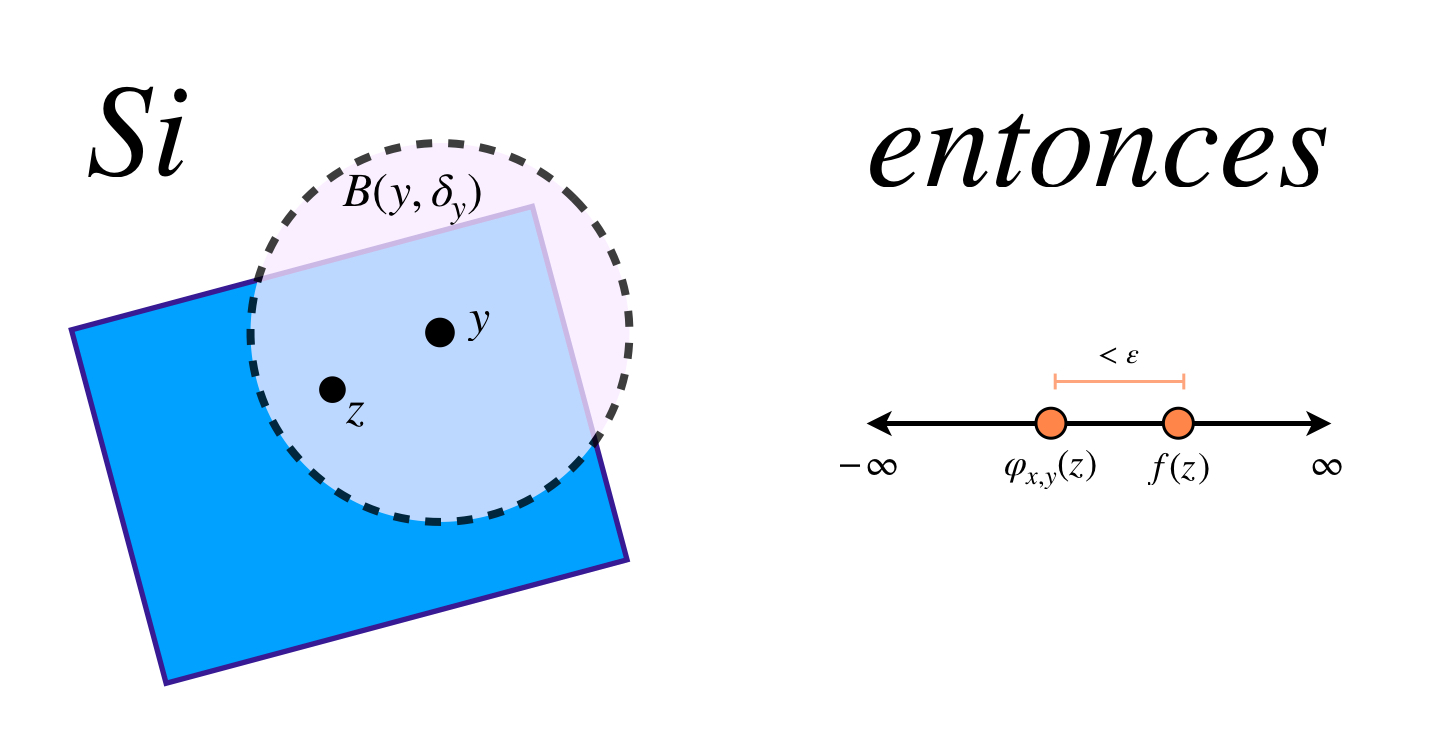
Sea $\varepsilon >0.$ Como $\mathcal{H}$ es equicontinuo, para cada $x \in X$ existe $\delta_x >0$ tal que para toda $f \in \mathcal{H}$ siempre que $d_X(x,z) < \delta_x,$ con $z \in X,$ se satisface
\begin{align}
d_Y(f(z),f(x)) < \frac{\varepsilon}{4}
\end{align}
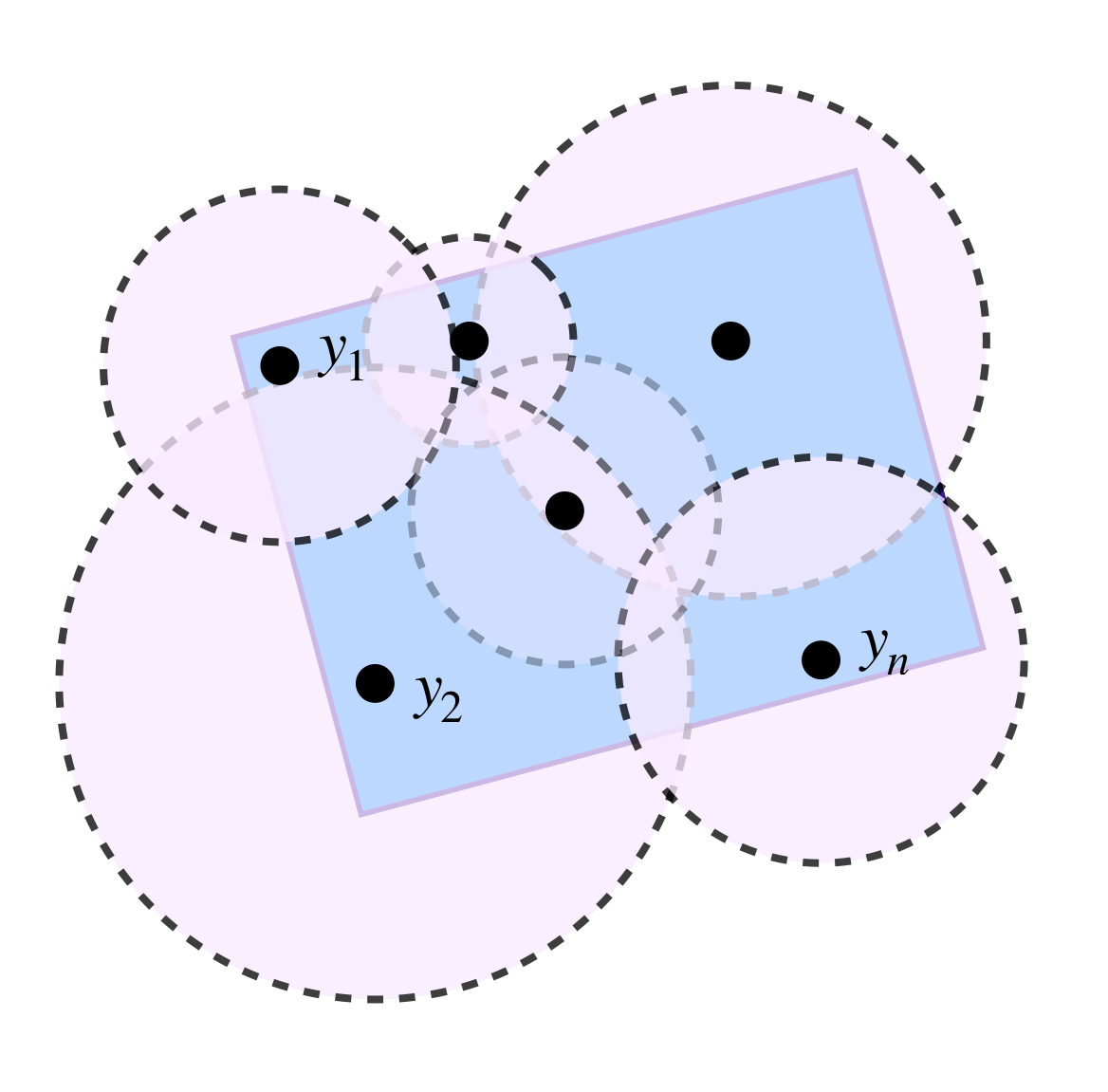
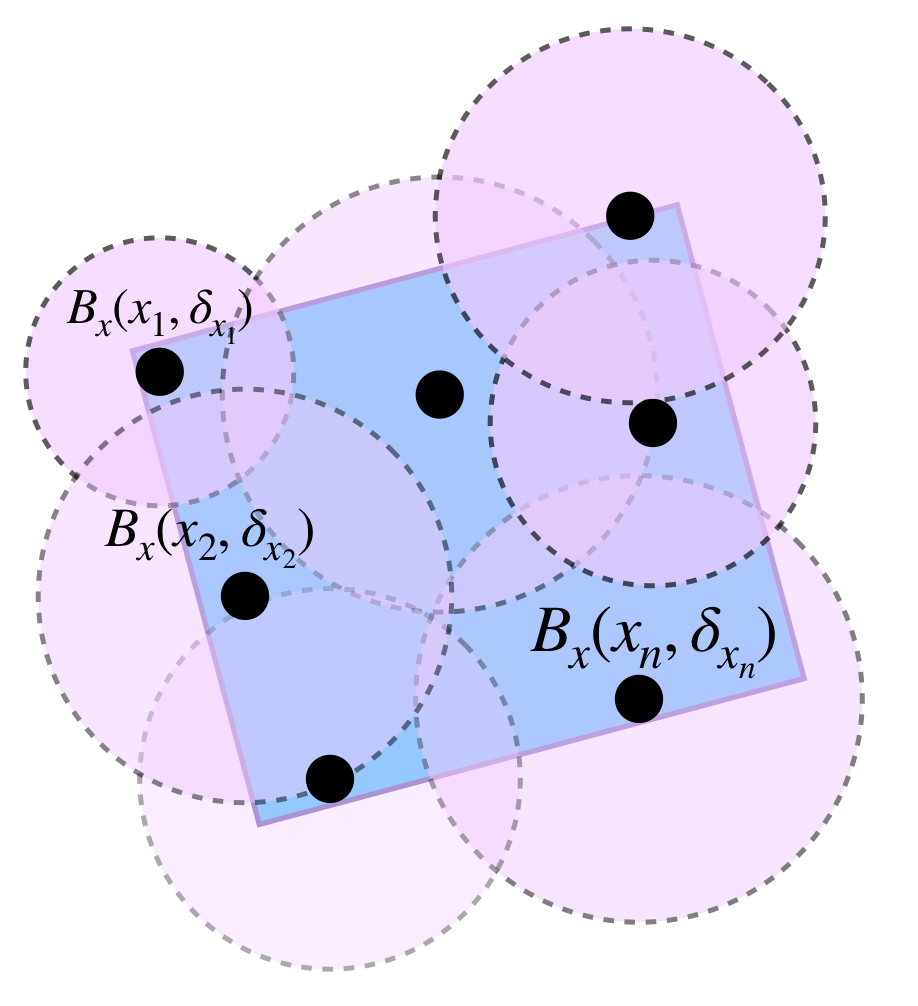
Por supuesto que $\{B_X \left( x, \delta_x \right) \, | \, \, x \in X \}$ es una cubierta abierta de $X.$
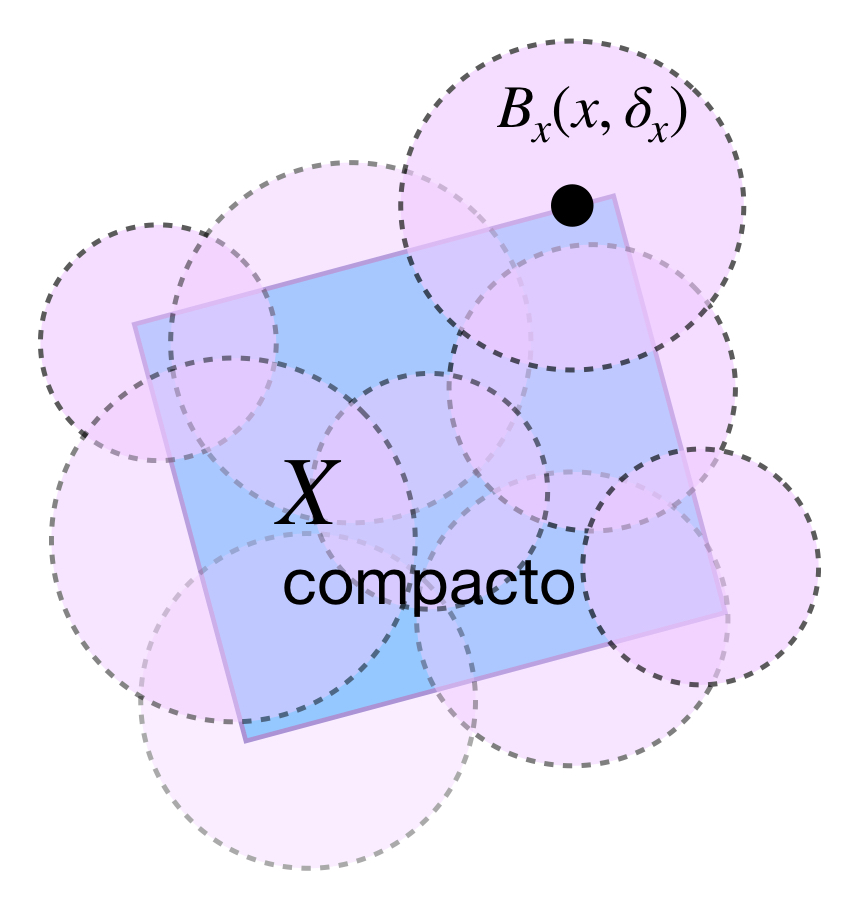
Como es compacto, existen $x_1, \, x_2,…,x_n \, \in X$ tales que
\begin{align}
X \subset B_X \left( x_1, \delta_{x_1} \right) \cup B_X \left( x_2, \delta_{x_2} \right) \cup … \cup B_X \left( x_n, \delta_{x_n} \right)
\end{align}
y como cada $\mathcal{H}(x_i), \, i \in \{1,…,n\}$ es totalmente acotado, para cada $x_i$ existen $y^i_1,\ y^i_2,…,y^i_{k_i} \, \in Y$ tales que
\begin{align}
\mathcal{H}(x_i) \subset B_Y \left( y^i_1, \frac{\varepsilon}{4} \right) \cup B_Y \left( y^i_2, \frac{\varepsilon}{4} \right) \cup… \cup B_Y \left( y^i_{k_i}, \frac{\varepsilon}{4} \right)
\end{align}
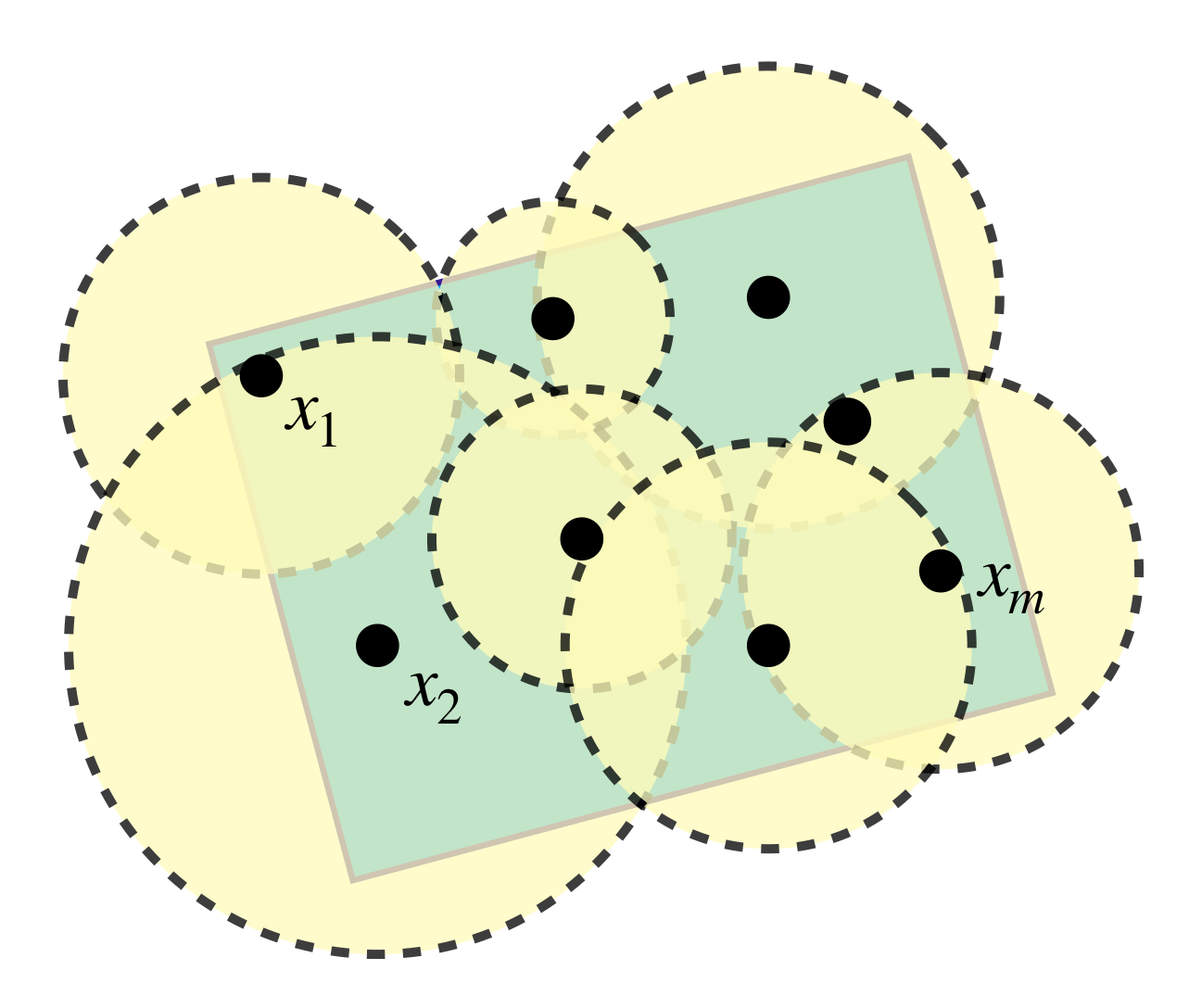
Uniendo todos los $\mathcal{H}(x_i)$ y todas las bolas que cubren a estos conjuntos tenemos que, renombrando los centros, existen finitos $y_1,…,y_{m} \, \in Y$ que satisfacen
\begin{align}
\mathcal{H}(x_1) \cup … \cup \mathcal{H}(x_n) \subset B_Y \left( y_1, \frac{\varepsilon}{4} \right) \cup … \cup B_Y \left( y_{m}, \frac{\varepsilon}{4} \right)
\end{align}
Podemos pensar en clasificar las funciones de $\mathcal{H}$ dependiendo de a qué bola de radio $y_k,$ para algún $k \in \{1,…,m\}$ es enviado cada $x_i, \, i \in \{1,…,n\}.$ Como este comportamiento puede asignarse a través de una función $\sigma:\{1,2,…,n\} \to \{1,2,…,m\},$ definimos los conjuntos:
$$\mathcal{H_\sigma}:= \left\{ f \in \mathcal{H} \, \Big| \, \, f(x_i) \in B_Y\left(y_{\sigma(i)},\frac{1}{4}\right) \, \forall \, i=1,2,…,n\right\}.$$
Sea $S$ el conjunto de todas las funciones con dominio en $\{1,2,…,n\}$ e imagen en $\{1,2,…,m\}.$ Se cumple que
\begin{align}
\mathcal{H} \subset \underset{\sigma \in S}{\cup} \, \mathcal{H}_\sigma
\end{align}
Argumentando formalmente, si $f \in \mathcal{H}$ por la expresión (7) se asegura que cada $f(x_i)$ con $i \in \{1,2,…,n\}$ está en alguna bola $B_Y \left( y_k, \frac{\varepsilon}{4} \right)$ para algún $k \in \{1,2,…,m\}.$ Nota que la función que relaciona a cada $i$ con su respectiva $k,$ según esta descripción, es algún elemento $\sigma \in S,$ por lo tanto se cumple (8).
Ahora vamos a probar que cada $\mathcal{H}_\sigma$ está contenida en una bola de radio $\varepsilon$ con centro en $\mathcal{H}.$
Considera $f,g \in \mathcal{H}_\sigma$ y sea $x \in X.$ Por (5) $x$ pertenece a alguna bola abierta $B_X(x_i, \delta_{x_i})$ para algún $i \in \{1,2,…,n\}.$ Entonces $d_X(x,x_i)< \delta_{x_i}.$ Recordemos que esta $\delta_{x_i}$ se eligió de tal forma que satisface la definición de equicontinuidad en $x_i.$ Así, según (4) se sigue que para cada $h \in \mathcal{H}:$
$$d_Y(h(x),h(x_i)) < \frac{\varepsilon}{4}.$$
De esto y la desigualdad del triángulo tenemos:
\begin{align}
\nonumber d_Y(f(x),g(x)) &\leq d_Y(f(x),f(x_i)) + d_Y(f(x_i),g(x))\\
\nonumber &\leq d_Y(f(x),f(x_i)) + d_Y(f(x_i),y_{\sigma(i)})+ d_Y(y_{\sigma(i)},g(x))\\
\nonumber &\leq d_Y(f(x),f(x_i)) + d_Y(f(x_i),y_{\sigma(i)})+ d_Y(y_{\sigma(i)},g(x_i))+ d_Y(g(x_i),g(x))\\
\nonumber &< \frac{\varepsilon}{4} +\frac{\varepsilon}{4} +\frac{\varepsilon}{4} +\frac{\varepsilon}{4} \\
&= \varepsilon.
\end{align}
Si tomamos el máximo de las $x´s \in X$ concluimos que $d_\infty(f,g) < \varepsilon$ para cualesquiera $f,g \in \mathcal{H}_\sigma,$ en consecuencia el conjunto $\mathcal{H}_\sigma$ está contenido en una bola de radio $\varepsilon$ con centro en cualquiera de sus funciones. Es decir, para cualquier $g_\sigma \in \mathcal{H}_\sigma$
$$\mathcal{H}_\sigma \subset B_\infty(g_\sigma,\varepsilon)$$
De esta contención y la expresada en (8) obtenemos que
$$\mathcal{H} \subset \underset{\sigma \in S}{\cup}B_\infty(g_\sigma,\varepsilon).$$
Y como $S$ es finito, concluimos que $\mathcal{H}$ es totalmente acotado.
Terminemos esta sección con el siguiente:
Corolario. Sea $X$ un espacio métrico compacto. Un subconjunto $\mathcal{H}$ de $\mathcal{C}^0(X, \mathbb{R}^n)$ es relativamente compacto en $\mathcal{C}^0(X, \mathbb{R}^n)$ si y solo si $\mathcal{H}$ es equicontinuo y acotado en $\mathcal{C}^0(X, \mathbb{R}^n).$
Demostración:
Sea $\mathcal{H}$ un subconjunto relativamente compacto en $\mathcal{C}^0(X, \mathbb{R}^n).$ Por el teorema de Arzelá-Ascoli, $\mathcal{H}$ es equicontinuo. Como $\overline{\mathcal{H}}$ es compacto entonces es acotado en $\mathcal{C}^0(X, \mathbb{R}^n),$ por lo tanto $\mathcal{H}$ también es acotado en $\mathcal{C}^0(X, \mathbb{R}^n).$
Ahora supongamos que $\mathcal{H}$ es equicontinuo y acotado en $\mathcal{C}^0(X, \mathbb{R}^n).$ Entonces existen $f_0 \in \mathcal{H}$ y $M>0$ tales que para cada $f \in \mathcal{H}$
$$\norm{f-f_0}_\infty := \underset{x \in X}{max}\norm{f(x) \, – \, f_0(x)} \leq M$$
De aquí podemos concluir que para cada $x \in X,$ el conjunto $\mathcal{H}(x)$ está acotado en $\mathbb{R}^n$ entonces así lo es también su cerradura, por lo que $\overline{\mathcal{H}}$ es cerrado y acotado en $\mathbb{R}^n$ de modo que $\mathcal{H}(x)$ es relativamente compacto y por el teorema de Arzelá-Ascoli, se cumple que $\mathcal{H}$ es relativamente compacto en $\mathcal{C}^0(X, \mathbb{R}^n).$
Más adelante…
Terminaremos la sección de compacidad mostrando un concepto que sigue la misma idea de las bolas de radio $\varepsilon$ que son las $\varepsilon$-redes. Hablaremos de la métrica de Hausdorff y de cómo es posible entender la compacidad a través de conjuntos finitos.
Tarea moral
- Para cada $n \in \mathbb{N},$ sea $f_n:[0, \infty) \to \mathbb{R}$ tal que $f_n(x):= sen \sqrt{x + 4 \pi ^2 n ^2}.$ Demuestra que
a) El conjunto $\mathcal{H} := \{f_n \, | \, n \in \mathbb{N} \}$ es equicontinuo.
b) Para cada $x \in [0, \infty)$ el conjunto $\mathcal{H}(x)$ es relativamente compacto en $\mathbb{R}.$ Te sugerimos probar que la sucesión $(f_n)_{n \in \mathbb{N}}$ converge puntualmente a $0$ en $[0, \infty).$
c) $\mathcal{H}$ no es un subconjunto compacto de $\mathcal{C}_b ^0([0, \infty), \mathbb{R}).$ Te sugerimos probar que la sucesión $(f_n)_{n \in \mathbb{N}}$ no converge uniformemente a $0$ en $[0, \infty).$
Concluye que la compacidad de $X$ es necesaria en el teorema de Arzelá-Ascoli. - Sea $X := \{ (x,y) \in \mathbb{R}^2 \, | \, (x,y) \neq (\frac{1}{2},0) \}$ y sea $f_n \in \mathcal{C}^0([0,1],X)$ tal que $f_n(x) := (x, \frac{1}{n} sen \pi x).$ Considera el conjunto $\mathcal{H} := \{f_n \, | \, n \in \mathbb{N}\}.$
a) ¿Es $\mathcal{H}$ equicontinuo?
b) ¿Es $\mathcal{H}$ acotado en $\mathcal{C}^0([0,1],X)?$
c) ¿Es $\mathcal{H}$ relativamente compacto en $\mathcal{C}^0([0,1],X)?$
Bibliografía
- Clapp, M., Análisis Matemático. Ciudad de México: Editorial Papirhos, IM-UNAM, 2013. Págs: 125-129.
- Kolmogorov, A.N., Fomin, S.V., Elementos de la Teoría de Funciones y del Análisis Funcional. (2a ed.). Moscú: Editorial MIR, 1975. Págs: 115-120.