Introducción
Probablemente recuerdes de los cursos de ecuaciones diferenciales algunos teoremas que, bajo ciertas condiciones, aseguran que existe una solución a una ecuación diferencial y además, esta es única. Puedes observar esta teoría a detalle en la página del curso Ecuaciones Diferenciales I en las secciones correspondientes a teorema de existencia y unicidad. Aquí probaremos el teorema como una aplicación del teorema de punto fijo de Banach. Comenzaremos resolviendo una ecuación diferencial particular.
Ejemplo: $\dfrac{dy}{dx} = y,$ con condición inicial $y(0)=1.$
Considera la ecuación
$$\frac{d \, y(x)}{dx} = y(x), \, y(0)=1$$
Resolverla significa encontrar una función $\, y \,$ cuya derivada respecto a la variable $x$ coincida con ella misma. Ya que buscamos llegar a que la solución existe y es única, habría que pensar en hallarla dentro de un espacio métrico completo tras aplicar varias veces, una función contracción. En estas condiciones el teorema de punto fijo de Banach asegura que la sucesión generada converge a un punto fijo que, en este caso, representa la solución de la ecuación diferencial.
Comencemos identificando la contracción $\phi$ que servirá al objetivo. Si $f$ es punto fijo de $\phi$ se tiene que
$$\phi(f) = f$$
Y si además es solución de $\dfrac{dy}{dx} = y \,$ también cumple que
$$f'(x)=f(x)$$
Esto nos lleva a buscar a $f$ en el espacio de funciones continuas $C^0[a,b]$ con la métrica uniforme $d_\infty$ y con $a,b \in \mathbb{R}$ tales que $0 \in [a,b],$ pues es donde se considera la condición inicial. Recordemos que en la entrada Convergencia uniforme y continuidad vimos propiedades que permiten concluir que este espacio sea completo. Así, el espacio identificado satisface las condiciones del teorema de punto fijo de Banach.
Supón que
\begin{align*}
&& f'(x) &=f(x)\\
&\Rightarrow &\int_{0}^{x} f'(t) \, dt & = \int_{0}^{x} f(t) \, dt \\
&\Rightarrow &f(x) \, – \, f(0) &= \int_{0}^{x} f(t) \, dt \\
&\Rightarrow &f(x) &= f(0) + \int_{0}^{x} f(t) \, dt
\end{align*}
De modo que definiremos $\phi$ como
$$\phi(f(x))\ := \, f(0) + \int_{0}^{x} f(t) \, dt $$
Si buscamos que la condición inicial sea $f(0) = 1,$ tenemos:
$$\phi(f(x))\ := \, 1 + \int_{0}^{x} f(t) \, dt$$
Existe un intervalo donde $\phi$ es contracción
A continuación probaremos que existe un intervalo $[a,b] \subset \mathbb{R}$ con $0 \in [a,b]$ donde la $\phi$ definida es contracción, es decir, que para cualquier $f,g \in C^0[a,b]$ ocurre que $d_\infty(\phi(f)), \phi(g)) \leq \alpha \, d_\infty (f,g),$ para algún $\alpha \in (0,1).$
Proponemos $[a,b] = [-\frac{1}{2},\frac{1}{2}].$ Tenemos dos casos:
Si $0 \leq x.$
\begin{align*}
|\phi(f(x)) \, – \, \phi(g(x))|&= \left|1 + \int_{0}^{x} f(t) \, dt \, – \, \left(1 + \int_{0}^{x} g(t) \, dt \right)\right|\\
&= \left|\int_{0}^{x} f(t) – g(t) \, dt \right|\\
& \leq \int_{0}^{x} |f(t) – g(t)| \, dt\\
& \leq (x-0) d_\infty(f,g) \\
& \leq \frac{1}{2} d_\infty(f,g)
\end{align*}
Si $x < 0.$
\begin{align*}
|\phi(f(x)) \, – \, \phi(g(x))|&= \left|1 + \int_{0}^{x} f(t) \, dt \, – \, \left(1 + \int_{0}^{x} g(t) \, dt \right)\right|\\
&= \left|\int_{0}^{x} f(t) – g(t) \, dt \right|\\
&= \left|- \int_{x}^{0} f(t) – g(t) \, dt \right|\\
&= \left| \int_{x}^{0} f(t) – g(t) \, dt \right|\\
& \leq \int_{x}^{0} |f(t) – g(t)| \, dt\\
& \leq (0-x) d_\infty(f,g) \\
& \leq \frac{1}{2} d_\infty(f,g)
\end{align*}
De ambos casos se sigue que
\begin{align*}
d_\infty(\phi(f)), \phi(g)) &= \underset{-\frac{1}{2} \leq x \leq \frac{1}{2}}{sup} \, |\phi(f(x)) \, – \, \phi(g(x))| \\
&\leq \underset{-\frac{1}{2} \leq x \leq \frac{1}{2}}{sup} \, \frac{1}{2} d_\infty(f,g) \\
& = \frac{1}{2} d_\infty(f,g)
\end{align*}
Por lo tanto $d_\infty(\phi(f),\phi(g)) \leq \frac{1}{2} \, d_\infty(f,g)$
Lo cual prueba que $\phi$ es una contracción con constante $\alpha = \frac{1}{2}.$
Nota que $[-\frac{1}{2}, \frac{1}{2}]$ cumple que tiene al punto $0,$ valor considerado condición inicial y donde se busca que $f(0)=1.$ Por otro lado, el tamaño de este intervalo, o más específicamente, la distancia entre $0$ y $\frac{1}{2}$ permite concluir la última desigualdad. Aunque la solución que vamos a encontrar satisface la ecuación en todo $\mathbb{R},$ las condiciones de este método encuentran la solución en un intervalo pequeño.
Generamos la sucesión $(\phi^n)_{n \in \mathbb{N}}$
A continuación generaremos la sucesión a partir de iteraciones en la función constante que satisface que para todo $x \in [-\frac{1}{2}, \frac{1}{2}], \, f_0(x) := 1.$ El teorema de punto fijo de Banach nos dice que esto nos permite llegar en el límite a la función buscada.
$f_0(x) = 1$
$f_1(x) = \phi(f_0(x)) = 1 + \int_{0}^{x}1 \, dt = 1+x$
$f_2(x) = \phi(f_1(x)) = 1 + \int_{0}^{x}1+t \, dt = 1+x+ \frac{x^2}{2}$
$f_3(x) = \phi(f_2(x)) = 1 + \int_{0}^{x}1+t + \frac{t^2}{2}\, dt = 1+x+ \frac{x^2}{2}+ \frac{x^3}{6}$
.
.
.
Entonces $ \, \underset{n \to \infty}{lim} \,f_n(x) \, = \, \displaystyle \sum_{k=0}^{\infty}\dfrac{x^k}{k!} = e^x.$
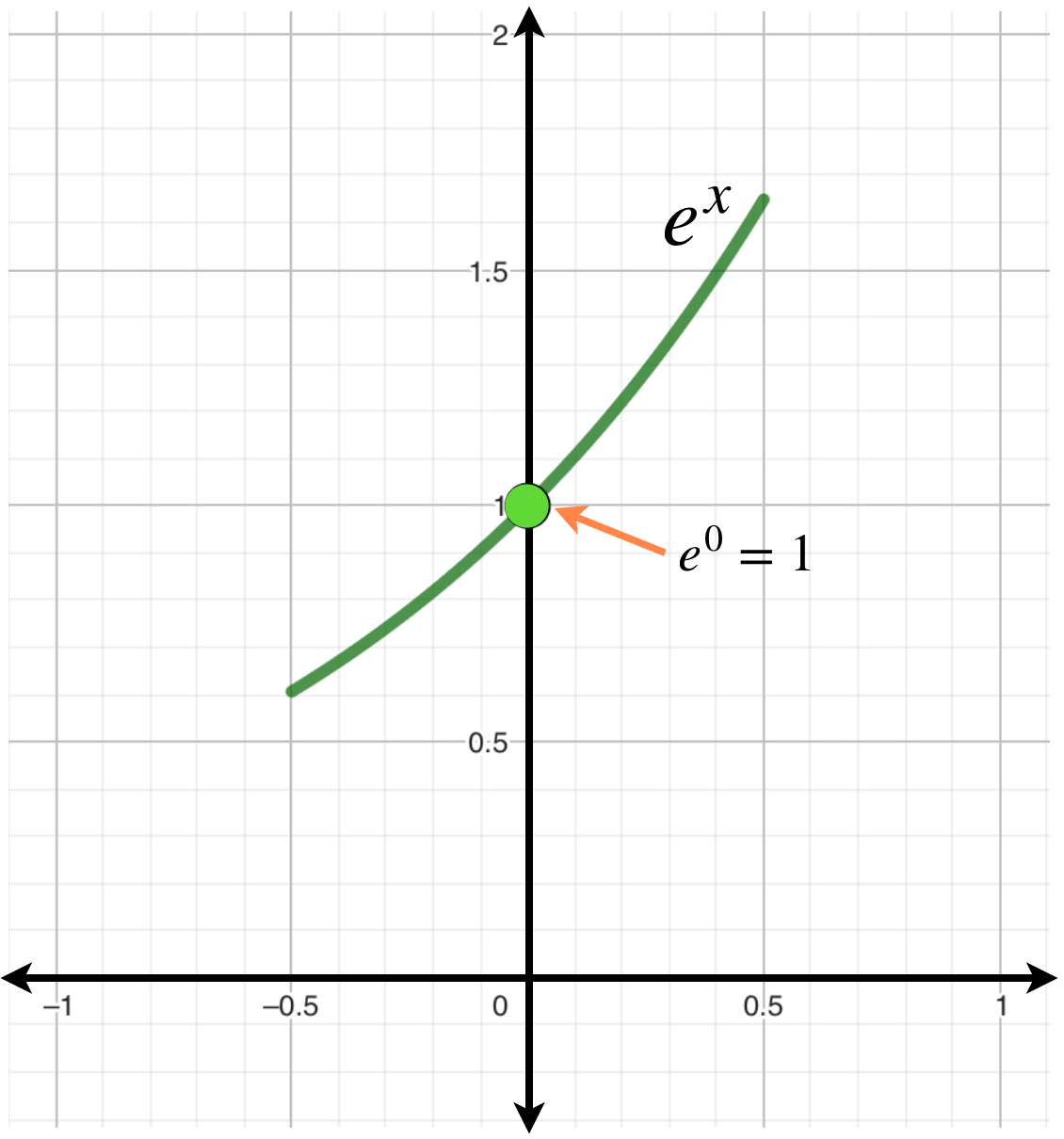
Queda como ejercicio al lector confirmar que $\phi(e^x)= e^x$ es decir, que $e^x$ es punto fijo de $\phi$ y que satisface la ecuación diferencial.
Más adelante…
Aplicaremos este método para resolver ecuaciones diferenciales más generales. Antes hablaremos de algunos resultados que usaremos en la prueba y veremos en la siguiente entrada.
Tarea moral
- Evalúa $\phi(e^x)$ y confirma que es igual a $e^x.$
- Propón otro intervalo $[a,b] \subset \mathbb{R}$ donde también funcione el método usado.
- Resuelve la misma ecuación diferencial pero con condición inicial $y(1)=1.$