En esta entrada daremos algunas técnicas para construir una función analítica determinando la función armónica conjugada de una función real armónica. Como veremos, dichos métodos se sustentan en los resultados de la entrada anterior sobre funciones conjugadas armónicas y en la existencia de la primitiva o antiderivada de una función analítica en un dominio.
El primer método que veremos es el de Milne-Thomson, el cual requiere de una función armónica, correspondiente con la parte real o la parte imaginaria de una función compleja, para construir una función analítica $f(z) = u(x,y) + iv(x,y)$, al determinar su conjugada armónica.
Método de Milne-Thomson. Sea $f(z) = u(x,y) + iv(x,y)$ una función compleja definida en algún dominio $D\subset \mathbb{C}$.
Para $z=x+iy\in D$ sabemos que: \begin{equation*} x = \frac{z+\overline{z}}{2}, \quad y = \frac{z-\overline{z}}{2i}, \end{equation*}entonces: \begin{equation*} f(z) = u\left( \frac{z+\overline{z}}{2}, \frac{z-\overline{z}}{2i} \right) + i v\left( \frac{z+\overline{z}}{2}, \frac{z-\overline{z}}{2i} \right). \end{equation*}
Si consideramos a $z$ y $\overline{z}$ como dos variables independientes, entonces para $z = \overline{z}$, tenemos que: \begin{equation*} f(z) = u(z,0) + iv(z,0). \tag{41.1} \end{equation*}
Notemos que la condición $z = \overline{z}$ es equivalente a que $y=0$, proposición 2.2(5), es decir que $z=x$ sea una variable real, en tal caso tendríamos que: \begin{equation*} f(x+iy) = f(x) = u(x,0) + iv(x,0). \tag{41.2} \end{equation*}
De (41) y (41.2) es claro que al imponer la condición $y=0$ en $f(z) = u(x,y) + iv(x,y)$ obtenemos una función que solo depende de $x$. Por lo que, al sustuir $x$ por $z$ en la expresión resultante obtendremos una función en términos de la variable $z$.
Como nuestro objetivo es construir una función $f$ que sea analítica en $D$, entonces requerimos, teorema 18.1, que las funciones reales $u(x,y)$ y $v(x,y)$ sean de clase $C^1(D)$ y satisfagan las ecuaciones de C-R en $D$. Bajo dichas condiciones sabemos que se cumple que: \begin{align*} f'(z) & = \frac{\partial u}{\partial x}(x,y) – i\frac{\partial u}{\partial y}(x,y)\\ & = \frac{\partial v}{\partial y}(x,y) + i\frac{\partial v}{\partial x}(x,y), \quad \forall z=x+iy\in D. \tag{41.3} \end{align*}
Supongamos que conocemos a una de las dos funciones reales $u(x,y)$ ó $v(x,y)$, correspondientes con las componentes de real e imaginaria, respectivamente, de $f$, y que dicha función es armónica en $D$. Sin pérdida de generalidad, supongamos que conocemos a la función $u(x,y)$, el procedimiento sería completamente análogo para $v$.
Dado que $u(x,y)$ es una función armónica en $D$, en particular es de clase $C^1(D)$, por lo que, considerando (41.3) definimos: \begin{equation*} \frac{\partial u}{\partial x}(x,y) := \varphi_1(x,y), \quad \frac{\partial u}{\partial y}(x,y) := \varphi_2(x,y),\quad z=x+iy\in D. \end{equation*}
Entonces, como la derivada de $f$ determina una nueva función analítica en $D$, proposición 36.4, de (41.1) se sigue que: \begin{align*} f'(z) & = \frac{\partial u}{\partial x}(x,y) – i\frac{\partial u}{\partial y}(x,y)\\ & = \varphi_1(x,y) – i \varphi_2(x,y)\\ & = \varphi_1(z,0) – i \varphi_2(z,0). \end{align*}
Integrando en ambos lados de esta última igualdad tenemos que: \begin{align*} f(z) & = \int \left[\varphi_1(z,0) – i \varphi_2(z,0)\right] dz + c\\ & = \int \varphi_1(z,0) dz – i \int \varphi_2(z,0) dz + c. \end{align*}
Análogamente, si conocemos a $v$ tenemos que: \begin{align*} f(z) & = \int \left[\phi_1(z,0) – i \phi_2(z,0)\right] dz + c\\ & = \int \phi_1(z,0) dz – i \int \phi_2(z,0) dz + c, \end{align*}donde $\phi_1(z,0) = v_y(x,y)$ y $\phi_2(z,0) = v_x(x,y)$.
En ambos casos, $c\in\mathbb{C}$ es una constante y consideraremos a $z$ como una variable de integración real, por lo que integramos con los métodos usuales.
Observación 41.1. Debe ser claro que en el desarrollo de este método hemos usado fuertemente el hecho de que toda función analítica $f$ en un dominio $D\subset\mathbb{C}$ tiene una primitiva, proposición 35.2, es decir, una función analítica $F(z)$ en $D$ tal que $F'(z) = f(z)$ para todo $z\in D$, lo cual justifica que es posible integrar a $f’$.
Procedemos a mostrar el uso de este primer método con el siguiente ejemplo.
Ejemplo 41.1. Sea $u:\mathbb{C} \to \mathbb{R}$ la función real dada por $u(x,y) = e^{-x} \left[(x^2 – y^2) \operatorname{cos}(y) + 2xy\operatorname{sen}(y)\right]$. Determinemos a la función entera $f$ cuya parte real es la función $u$.
Solución. Primeramente, notemos que la función real $u(x,y)$ es de clase $C^\infty(\mathbb{C})$, por lo que en particular es de clase $C^2(\mathbb{C})$. Procedemos a verificar que $u$ es una función armónica.
Después de un poco de cuentas, para todo $z=x+iy\in\mathbb{C}$ tenemos que: \begin{align*} \frac{\partial u}{\partial x} = e^{-x} \left[2x\operatorname{cos}(y) + 2y\operatorname{sen}(y) – (x^2-y^2) \operatorname{cos}(y) – 2xy \operatorname{sen}(y)\right],\\ \frac{\partial u}{\partial y} = e^{-x} \left[-2y\operatorname{cos}(y) – (x^2-y^2) \operatorname{sen}(y) + 2xy \operatorname{cos}(y) + 2x \operatorname{sen}(y)\right],\\ \frac{\partial^2 u}{\partial x^2} = e^{-x} \left[(x^2-4x-y^2+2) \operatorname{cos}(y) + 2y(x-2) \operatorname{sen}(y)\right],\\ \frac{\partial^2 u}{\partial y^2} = -e^{-x} \left[(x^2-4x-y^2+2) \operatorname{cos}(y) + 2y(x-2) \operatorname{sen}(y)\right]. \end{align*}
De donde: \begin{equation*} \nabla^2 u = \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} = 0, \end{equation*}por lo que $u$ es armónica en $\mathbb{C}$.
Para todo $z=x+iy\in\mathbb{C}$ definimos: \begin{equation*} \frac{\partial u}{\partial x}(x,y) := \varphi_1(x,y), \quad \frac{\partial u}{\partial y}(x,y) := \varphi_2(x,y). \end{equation*}
De acuerdo con el método de Milne-Thomson, si $x=z$ y $y=0$, tenemos que: \begin{equation*} \varphi_1(z,0) = 2ze^{-z} – z^2 e^{-z} = e^{-z}(2z – z^2), \end{equation*} \begin{equation*} \varphi_2(z,0) = 0. \end{equation*}
Por lo que: \begin{equation*} f'(z) = \varphi_1(z,0) – i \varphi_2(z,0) = e^{-z}(2z – z^2). \end{equation*}
De donde obtenemos a la función entera $f$, tal que $\operatorname{Re}f = u$: \begin{align*} f(z) & = z^2 e^{-z} + c\\ & = (x+iy)^2 e^{-(x+iy)} + c\\ & = e^{-x} \left[(x^2 – y^2) \operatorname{cos}(y) + 2xy\operatorname{sen}(y)\right] + i e^{-x} \left[ 2xy\operatorname{cos}(y) – (x^2-y^2)\operatorname{sen}(y)\right] + c, \end{align*}para toda $z=x+iy\in\mathbb{C}$, con $c\in\mathbb{C}$ constante.
Recordemos el siguiente resultado de nuestros cursos de Ecuaciones Diferenciales.
Definición 41.1. (Diferencial de una función real de dos variables.) Sean $D\subset\mathbb{R}^2$ un dominio y $f:D\to\mathbb{R}$ una función de clase $C^1(D)$. Se define a la diferencial de $f$ como: \begin{equation*} df = \frac{\partial f}{\partial x} dx + \frac{\partial f}{\partial y} dy. \end{equation*}
Definición 41.2. (Ecuación diferencial exacta.) Sean $D\subset\mathbb{R}^2$ un dominio y $M,N:D\to\mathbb{R}$ dos funciones continuas en $D$. La expresión diferencial: \begin{equation*} M(x,y)dx + N(x,y)dy, \end{equation*}es una diferencial exacta en $D$ si ésta corresponde a la diferencial de alguna función $f:D\to\mathbb{R}$. Una ecuación diferencial de primer orden de la forma: \begin{equation*} M(x,y)dx + N(x,y)dy=0, \end{equation*}es una ecuación exacta si existe una función $f:D\to\mathbb{R}$ tal que en el dominio $D$ cumple: \begin{equation*} \frac{\partial f(x,y)}{\partial x} = M(x,y), \quad \frac{\partial f(x,y)}{\partial y} = N(x,y). \end{equation*}
Teorema 41.1. (Criterio para una diferencial exacta.) Sean $D\subset\mathbb{R}^2$ un dominio y $M,N:D\to\mathbb{R}$ dos funciones continuas en $D$ de clase $C^1(D)$. Entonces, una condición necesaria y suficiente para que la ecuación $M(x,y)dx+N(x,y)dy=0$ sea diferencial exacta en $D$, es que se cumpla: \begin{equation*} \frac{\partial M(x,y)}{\partial y} = \frac{\partial N(x,y)}{\partial x}. \end{equation*}
Método utilizando ecuaciones diferenciales exactas. Supongamos que $f(z)=u(x,y)+iv(x,y)$ es una función analítica en algún dominio $D\subset\mathbb{C}$ y que conocemos a alguna de las dos funciones reales $u$ o $v$, entonces podemos determinar explícitamente a $f$. Sin pérdida de generalidad supongamos que conocemos a $u$, procedemos a obtener a $v$.
Consideremos a la diferencial: \begin{equation*} dv = \frac{\partial v}{\partial x} dx + \frac{\partial v}{\partial y} dy, \end{equation*}
Como $f$ es analítica en $D$, entonces satisface las ecuaciones de C-R en $D$, es decir: \begin{equation*} dv = \frac{\partial v}{\partial x} dx + \frac{\partial v}{\partial y} dy = -\frac{\partial u}{\partial y} dx + \frac{\partial u}{\partial x} dy. \tag{41.4} \end{equation*}
Dado que $f=u+iv$ es analítica en $D$, entonces $u$ y $v$ son armónicas en $D$, por lo que existen: \begin{equation*} \frac{\partial M}{\partial y} = – \frac{\partial^2 u}{\partial y^2}, \quad \frac{\partial N}{\partial x} = \frac{\partial^2 u}{\partial x^2}, \end{equation*}y $u$ satisface la ecuación de Laplace, es decir: \begin{equation*} \frac{\partial N}{\partial x} – \frac{\partial M}{\partial y} = \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} = 0, \end{equation*}de donde: \begin{equation*} \frac{\partial M}{\partial y} = \frac{\partial N}{\partial x}, \end{equation*}es decir, (41.4) es una ecuación diferencial exacta, por lo que podemos resolverla para obtener a $v$.
Procedemos a mostrar el uso de este segundo método con el siguiente ejemplo.
Ejemplo 41.2. Determinemos a la función entera $f(z)=u(x,y)+iv(x,y)$, cuya parte real es la función: \begin{equation*} u(x,y) = e^{x}\left[x\operatorname{cos}(y) – y\operatorname{sen}(y)\right]. \end{equation*}
Integrando respecto a $x$ la igualdad anterior tenemos que: \begin{align*} v(x,y) & = \int e^{x} \left[x\operatorname{sen}(y) + \operatorname{sen}(y) + y\operatorname{cos}(y)\right] dx + g(y)\\ & = \operatorname{sen}(y) \int e^{x} x dx + \operatorname{sen}(y) \int e^x dx + y\operatorname{cos}(y) \int e^x dx + g(y)\\ & = e^x (x-1) \operatorname{sen}(y) + e^x \operatorname{sen}(y) + e^x y \operatorname{cos}(y) + g(y)\\ & = x e^x \operatorname{sen}(y) + e^x y \operatorname{cos}(y) + g(y). \end{align*}
Derivando respecto a $y$ la igualdad anterior y considerando (41.5) tenemos que: \begin{align*} \frac{\partial v(x,y)}{\partial y} & = x e^x \operatorname{cos}(y) + e^x\left[\operatorname{cos}(y) – y\operatorname{sen}(y)\right] + g'(y)\\ & = e^x\left[x \operatorname{cos}(y) + \operatorname{cos}(y) – y\operatorname{sen}(y)\right] + g'(y)\\ & = e^{x} \left[x\operatorname{cos}(y) – y\operatorname{sen}(y) + \operatorname{cos}(y)\right], \end{align*}de donde $g'(y) = 0$, por lo que $g(y)=c$, con $c\in\mathbb{R}$.
Entonces: \begin{equation*} v(x,y) = e^x \left[ x \operatorname{sen}(y) + y \operatorname{cos}(y)\right] + c, \end{equation*}con $c$ una constante real.
Por lo tanto, para todo $z\in\mathbb{C}$ tenemos que: \begin{align*} f(z) & = u(x,y) + iv(x,y)\\ & = e^{x}\left[x\operatorname{cos}(y) – y\operatorname{sen}(y)\right] + i e^x \left[ x \operatorname{sen}(y) + y \operatorname{cos}(y)\right] +ic\\ & = xe^x \left[\operatorname{cos}(y) +i \operatorname{sen}(y)\right] + iye^x \left[\operatorname{cos}(y) +i \operatorname{sen}(y)\right] + ic\\ & = xe^x e^{iy} + iye^{iy} + ic\\ & = e^{x+iy} \left(x+iy\right) +ic\\ & = z e^z + a, \end{align*}donde $a=ic\in\mathbb{C}$ es una constante.
Cerramos está entrada con un último método para construir funciones analíticas sin utilizar integrales.
Proposición 41.1. Sea $U\subset\mathbb{C}$ un conjunto abierto, tal que $0\in U$, y $f:U \to\mathbb{C}$ una función analítica en $U$. Si $\operatorname{Re}f(z):=u(x,y)$ es una función armónica en $U$, entonces: \begin{equation*} f(z)=2u\left(\frac{z}{2},\frac{z}{2i}\right) + c, \end{equation*}con $c$ una constante. De de hecho $c=-\overline{f(0)}$.
De acuerdo con los resultados de la entrada 19, sabemos que al ser $f$ analítica en $U$, entonces se cumple que: \begin{equation*} \frac{\partial \overline{f(z)}}{\partial z} = 0, \end{equation*}por lo que podemos considerar a la función $\overline{f(z)}$ como una función de $\overline{z}$ y denotamos esto como $\overline{f(z)} = \overline{f}(\overline{z})$. Entonces, para $z=x+iy\in U$ tenemos que: \begin{equation*} u\left(\frac{z+\overline{z}}{2}, \frac{z-\overline{z}}{2i}\right) = u(x,y) = \frac{f(z)+\overline{f}(\overline{z})}{2}, \end{equation*}lo cual se cumple para todo $z$ y todo $\overline{z}$, por lo que podemos considerar a estas variables como independientes. Si $\overline{z} = 0$, entonces: \begin{equation*} u\left(\frac{z}{2}, \frac{z}{2i}\right) = \frac{f(z)+\overline{f}(0)}{2} = \frac{f(z)+\overline{f(0)}}{2}, \end{equation*}es decir: \begin{equation*} f(z)=2u\left(\frac{z}{2},\frac{z}{2i}\right) – \overline{f(0)}. \end{equation*}
Por otra parte $u(0,0) = 0$, entonces: \begin{equation*} f(z) = 2u\left(\frac{z}{2},\frac{z}{2i}\right) – u(0,0) + bi = i(z^3+b), \end{equation*}con $b\in\mathbb{R}$.
Tarea moral
Determina la función analítica $f(z)$ tal que $\operatorname{Re}f(z) = u(x,y)$, donde: a) $u(x,y) = x^3-3xy^2+3x+1$. b) $u(x,y) = \operatorname{sen}(x) \operatorname{cosh}(y)$.
Sea $u(x,y)=x^3-3xy^2$. Muestra que $u$ es armónica en $\mathbb{C}$ y determina la función analítica $f(z)$ tal que $\operatorname{Re}f(z) = u(x,y)$.
Prueba que la función $u(x,y) = x^3-3xy^2+3x^2-3y^2+1$ satisface la ecuación de Laplace. Encuentra su función armónica conjugada $v$ y determina la función analítica $f=u+iv$.
Muestra que la función $u(x,y) = \dfrac{\operatorname{ln}(x^2+y^2)}{2}$ es armónica. Encuentra su función armónica conjugada $v$ y determina la función analítica $f=u+iv$.
Si $u(x,y)$ y $v(x,y)$ son dos funciones reales que satisfacen la ecuación de Laplace, muestra que $U(x,y)+iV(x,y)$ es una función analítica, donde: \begin{equation*} U(x,y) = \frac{\partial u(x,y)}{\partial y} – \frac{\partial u(x,y)}{\partial x}, \quad V(x,y) = \frac{\partial v(x,y)}{\partial x} + \frac{\partial v(x,y)}{\partial y}. \end{equation*}
Más adelante…
Con esta entrada concluimos la cuarta unidad del curso. En la siguiente entrada iniciaremos la quinta y última unidad del curso correspondiente con algunas de las aplicaciones más importantes de los resultados vistos a lo largo del curso, en particular veremos las series de Taylor, las series de Laurent y el Teorema del Residuo, mediante los cuales, principalmente, nos será posible evaluar integrales reales de manera sencilla.
En la segunda unidad estudiamos a las funciones complejas en general y definimos a algunas de las funciones complejas más elementales. Es importante recordar que a través de las componentes real e imaginaria, es decir, las funciones reales $u(x,y)$ y $v(x,y)$ de una función compleja $f(z)=u(x,y) + iv(x,y)$, vimos que es posible caracterizar la analicidad de $f$ considerando a las ecuaciones de C-R. Por otra parte, en la entrada 36, de esta unidad, vimos que una función analítica en un dominio $D\subset\mathbb{C}$ tiene derivadas de todos los órdenes.
En esta entrada veremos que las propiedades de diferenciabilidad de las componentes real e imaginaria de una función compleja, nos permitirán caracterizar aún más a las funciones analíticas, en particular nos centraremos en las funciones complejas dadas por un par de funciones reales $u(x,y)$ y $v(x,y)$ de clase $C^2$, es decir, tales que todas sus segundas derivadas parciales existen y son continuas, definición 17.2, las cuales resultarán ser analíticas. Por lo que, a través de este tipo de funciones reales nos será posible construir funciones analíticas y estudiar algunas de sus propiedades geométricas.
Es importante enfatizar en el hecho de que una función analítica en un dominio es de clase $C^\infty$, corolario 36.3, por lo que sus componentes real e imaginaria son también de clase $C^\infty$ en el dominio de definición de $f$.
Definición 40.1. (Funciones conjugadas.) Sean $D\subset\mathbb{C}$ un dominio y $f:D\to\mathbb{C}$ una función. Si $f(z)=u(x,y) + iv(x,y)$ es analítica en $D$ se dice que las funciones reales $u(x,y)$ y $v(x,y)$ son funciones conjugadas.
Proposición 40.1. Sea $f(z) = u(x,y)+iv(x,y)$ una función analítica en un dominio $D\subset\mathbb{C}$. Entonces las funciones reales $u(x,y)$ y $v(x,y)$ satisfacen la ecuación de Laplace, es decir: \begin{equation*} \nabla^2 u = \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} = 0. \end{equation*} \begin{equation*} \nabla^2 v = \frac{\partial^2 v}{\partial x^2} + \frac{\partial^2 v}{\partial y^2} = 0. \end{equation*}
Demostración. Supongamos que $f(z) = u(x,y)+iv(x,y)$ es una función analítica en algún dominio $D\subset\mathbb{C}$. Por el corolario 17.1 sabemos que las funciones reales $u(x,y)$ y $v(x,y)$ satisfacen las ecuaciones de C-R en todo punto del dominio $D$, es decir: \begin{equation*} \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y}, \quad \frac{\partial u}{\partial y} = – \frac{\partial v}{\partial x},\quad \forall z=x+iy\in D. \end{equation*}
Dado que $f$ es analítica en $D$, entonces por el corolario 36.3 tenemos que existen las derivadas de todos los órdenes de $f$ en $D$ y por tanto las funciones reales $u(x,y)$ y $v(x,y)$ son de clase $C^{k}(D)$, en particular son de clase $C^2(D)$, por lo que existen y son continuas todas las derivadas parciales de segundo orden de dichas funciones. Entonces, por el teorema 38.1 tenemos que para $z=x+iy\in D$ se cumple: \begin{equation*} \frac{\partial^2 u}{\partial x^2} = \frac{\partial^2 v}{\partial y \partial x} = \frac{\partial^2 v}{\partial x \partial y} = – \frac{\partial^2 u}{\partial y^2}, \end{equation*}de donde: \begin{equation*} \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} = 0. \end{equation*}
Definición 40.2. (Funciones armónicas.) Sean $U\subset\mathbb{R}^2$ un conjunto abierto y $u: U \to \mathbb{R}$ una función de clase $C^2(U)$. Se dice que $u(x,y)$ es armónica si para todo $(x,y)\in U$ se cumple la ecuación de Laplace: \begin{equation*} \nabla^2 u = \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} = 0. \tag{40.1} \end{equation*}
En particular, si $f(z) = u(x,y) + iv(x,y)$ es analítica en un dominio $D\subset\mathbb{C}$, entonces, por la proposición 40.1, tenemos que $u(x,y)$ y $v(x,y)$ son armónicas en $D$. En tal caso, las funciones $u$ y $v$ son llamadas funciones armónicas conjugadas.
Proposición 40.2. Si las funciones armónicas conjugadas $u(x,y)$ y $v(x,y)$ satisfacen las ecuaciones de C-R, entonces la función $f(z) = u(x,y)+iv(x,y)$ es una función analítica.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Definición 40.3. Si $u(x,y)$ y $v(x,y)$ son dos funciones armónicas en algún dominio $D\subset\mathbb{C}$ y dichas funciones reales satisfacen las ecuaciones de C-R en $D$, es decir, la función $f(z) = u(x,y)+iv(x,y)$ es analítica $D$, entonces se dice que $v$ es una función armónica conjugada de $u$.
Corolario 40.1. Una función $f(z) = u(x,y)+iv(x,y)$ es analítica en un dominio $D$ si y solo si $v(x,y)$ es una función armónica conjugada de $u(x,y)$.
Demostración. Se sigue de las proposiciones 40.1 y 40.2, por lo que los detalles sedejan como ejercicio al lector.
$\blacksquare$
Teorema 40.1. Sea $D\subset\mathbb{C}$ un dominio. Entonces cada función real $u:D\to\mathbb{R}$, que es armónica en $D$, tiene una armónica conjugada en $D$ si y solo si $D$ es simplemente conexo.
Demostración. Sea $D\subset\mathbb{C}$ un dominio.
$(\Longleftarrow$ Supongamos que $D$ es simplemente conexo. Procedemos a construir una función armónica conjugada de $u$, la cual por hipótesis es armónica en $D$.
Como $u$ es armónica, entonces es de clase $C^{2}(D)$, en particular es de clase $C^{1}(D)$, por lo que existen las primeras derivadas parciales de $u$ y son continuas, es decir, $g$ está bien definida. Más aún, por hipótesis $u$ satisface la ecuación de Laplace (40.1) en $D$, es decir: \begin{equation*} \nabla^2 u = \frac{\partial^2 u(x,y)}{\partial x^2} + \frac{\partial^2 u(x,y)}{\partial y^2} = 0, \end{equation*}de donde: \begin{align*} \frac{\partial U(x,y)}{\partial x} & = \frac{\partial}{\partial x}\left[ \frac{\partial u(x,y)}{\partial x}\right]\\ & = \frac{\partial^2 u(x,y)}{\partial x^2}\\ & = – \frac{\partial^2 u(x,y)}{\partial y^2}\\ & = \frac{\partial}{\partial y}\left[ – \frac{\partial u(x,y)}{\partial y}\right] = \frac{\partial V(x,y)}{\partial y}, \tag{40.2} \end{align*}para todo $z=x+iy\in D$.
Por otra parte, como $u$ es de clase $C^{2}(D)$, por el teorema 38.1 se cumple que: \begin{align*} \frac{\partial U(x,y)}{\partial y} & = \frac{\partial}{\partial y}\left[ \frac{\partial u(x,y)}{\partial x}\right]\\ & = \frac{\partial^2 u(x,y)}{\partial y \partial x}\\ & = \frac{\partial^2 u(x,y)}{\partial x \partial y}\\ & = \frac{\partial}{\partial x}\left[ \frac{\partial u(x,y)}{\partial y}\right]\\ & = -\frac{\partial}{\partial x}\left[ -\frac{\partial u(x,y)}{\partial y}\right] = -\frac{\partial V(x,y)}{\partial x}, \tag{40.3} \end{align*}para todo $z=x+iy\in D$.
Entonces, de (40.2) y (40.3) se sigue que $U$ y $V$ son funciones de clase $C^1(D)$ que satisfacen las ecuaciones de C-R en $D$, por lo que, teorema 18.1, $g$ es una función analítica en $D$.
Como $D$ es un dominio simplemente conexo y $g$ una función analítica en $D$, del corolario 38.4 tenemos que existe una función $F:D\to\mathbb{C}$ analítica en $D$, tal que $F'(z) = g(z)$ para todo $z\in D$.
Sea $F(z)=\tilde{u}(x,y) + iv(x,y)$. Del teorema 17.1 se sigue que $F$ satisface las ecuaciones de C-R en $D$, por lo que: \begin{align*} F'(z) & = \frac{\partial \tilde{u}}{\partial x} – i \frac{\partial \tilde{u}}{\partial y}\\ & = \frac{\partial u}{\partial x} – i \frac{\partial u}{\partial y} = g(z), \end{align*}para todo $z=x+iy\in D$.
Por lo que, de la proposición 19.2 se sigue que $\tilde{u} – u = c$, para algún $c\in\mathbb{R}$.
Entonces la función $f(z)=F(z)-c=u(x,y)+iv(x,y)$ es una función analítica en $D$, tal que $\operatorname{Re}(z) = u(x,y)$, es decir, $v$ es una función armónica conjugada de $u$ en $D$.
$\Longrightarrow)$ Supongamos que toda función armónica $u:D\to\mathbb{R}$ tiene una armónica conjugada en $D$. Veamos que $D$ es simplemente conexo. De acuerdo con el teorema 38.5, basta probar que todo contorno cerrado en $D$ es homólogo a $0$ en $D$, es decir, que $n(\gamma,z_0) = 0$ para todo $z_0 \in \mathbb{C}\setminus D$.
Sea $\gamma$ un contorno cerrado en $D$ y $z_0 \in \mathbb{C}\setminus D$ fijo. Definimos a la función real $u:\mathbb{C}\setminus \{z_0\} \to \mathbb{R}$ como: \begin{equation*} u(z) := \operatorname{Log}|z-z_0|. \end{equation*}
No es difícil verificar que $u$ es armónica en $\mathbb{C}\setminus \{z_0\}$ y por tanto en $D$, por lo que se deja como ejercicio al lector. Por hipótesis existe una función armónica conjugada de $u$, digamos $v$, en $D$. Entonces, corolario 40.1, $f(z) = u(x,y)+iv(x,y)$ es una función analítica en $D$.
Definimos a la función $h:D\to\mathbb{C}$ como: \begin{equation*} h(z) := (z-z_0)e^{-f(z)}, \end{equation*}la cual también es analítica en $D$. Por las proposiciones 20.2(4) y 21.1(5) se cumple que: \begin{equation*} |h(z)| = |z-z_0|e^{-u(z)} = |z-z_0|e^{-\operatorname{Log}|z-z_0|} = \frac{|z-z_0|}{|z-z_0|} =1, \end{equation*}para todo $z\in D$.
Por lo que, de la proposición 19.3(2) concluimos que $h$ es una función constante en $D$, entonces: \begin{equation*} 0 = h'(z) = e^{-f(z)} – (z-z_0)e^{-f(z)} f'(z), \end{equation*}es decir: \begin{equation*} f'(z) = \frac{1}{z-z_0}, \end{equation*}para todo $z\in D$.
Claramente $f$ es una primitiva de $f’$ en $D$, por lo que del TFC para integrales de contorno, proposición 35.1 y la definición 36.1, al ser $\gamma$ cerrado, se tiene que: \begin{equation*} 0 = \frac{1}{2\pi i} \int_{\gamma} f'(z) dz = \frac{1}{2\pi i} \int_{\gamma} \frac{1}{z-z_0} dz = n(\gamma, z_0), \end{equation*}es decir, $\gamma$ es homólogo a $0$ en $D$.
Dado que $z_0 \in \mathbb{C}\setminus D$ y el contorno cerrado $\gamma$, en $D$, son arbitrarios, entonces el resultado de sigue del teorema 38.5.
$\blacksquare$
Observación 40.1. El resultado anterior implica que cada función armónica en el plano complejo es la parte real de una función entera. En particular, el teorema anterior garantiza que una función armónica $u$ definida en un disco abierto siempre tiene una función armónica conjugada en dicho disco.
Corolario 40.2. Sean $U\subset\mathbb{C}$ un conjunto abierto y $u:U\to\mathbb{R}$ una función armónica, entonces $u$ tiene una función armónica conjugada en cada disco abierto contenido en $U$. En particular $u$ es de clase $C^\infty(U)$.
Demostración. La primera parte es consecuencia inmediata del teorema 40.1.
Verifiquemos la última parte. Dado que cada función armónica $u:U\to\mathbb{R}$ tiene una función armónica conjugada en cada disco abierto, digamos $v$, entonces $f=u+iv$ es una función analítica en cada disco abierto en $U$, por lo que es analítica en $U$. Entonces, del corolario 36.3, se tiene que $f$ es de clase $C^\infty(U)$, por lo tanto $u$ es de clase $C^\infty(U)$.
$\blacksquare$
Observación 40.2. De los corolarios 37.5 y 40.2 se sigue que para un conjunto abierto $U\subset\mathbb{C}$, en el cual está definida una función armónica $u$, dicha función tiene una función armónica conjugada $v$ en cada disco abierto $B(z_0,r)\subset U$ y que $f=u+iv$ es una función analítica en $B(z_0,r)$, por lo que $u$ y $v$ tienen la propiedad del valor medio en $U$, es decir: \begin{equation*} u(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} u(z_0+e^{it}) dt, \end{equation*} \begin{equation*} v(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} v(z_0+e^{it}) dt, \end{equation*}para cada $z_0 \in U$.
Teorema 40.2. (Principio del módulo máximo para funciones armónicas.) Sea $u$ una función armónica en un dominio $D\subset\mathbb{C}$. Si existe un punto $z_0 \in D$ tal que $u(z) \leq u(z_0)$ para todo $z\in D$, entonces $u$ es una función constante en $D$.
Demostración. Dadas las hipótesis, sea $z_0\in D$. Como $D$ es abierto entonces existe $r>0$ tal que $B(z_0,r)\subset D$. Por el corolario 40.2 tenemos que existe una función armónica conjugada de $u$ en $B(z_0,r)$, digamos $v$, entonces $f=u+iv$ es analítica en $B(z_0,r)$, por lo que del corolario 37.2, aplicado al disco $B(z_0,r)$, se tiene que $u$ y $v$ son funciones constantes en $B(z_0,r)$. Procediendo como en la prueba del teorema 37.4, podemos aplicar el argumento anterior a cada punto del conjunto: \begin{equation*} U=\{z\in D : u(z) = u(z_0)\}, \end{equation*}por lo que $U$ es abierto. Es claro que $U$ es no vacío y se deja como ejercicio al lector verificar que $U$ es cerrado, y como $D$ es un conjunto conexo, entonces $D=U$, por lo que $u$ es constante en $D$.
Corolario 40.3. Sean $D\subset\mathbb{C}$ un dominio acotado con frontera $\partial D$ y $u:\overline{D} \to\mathbb{R}$ una función real continua. Si $u$ es armónica en $D$, entonces $u(z)$ alcanza su máximo en algún punto de la frontera de $D$.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Observación 40.3. Al igual que con el principio del módulo máximo para funciones analíticas, existen diversas formulaciones del principio del módulo máximo para funciones armónicas.
Ejemplo 40.1. Veamos que la función $u(x,y) = e^x \operatorname{cos}(y)$ es armónica en $\mathbb{C}$. Determinemos a su función armónica conjugada $v(x,y)$ y luego a la función entera $f(z) = u(x,y) + iv(x,y)$.
Solución. Primeramente procedemos a verificar que la función $u(x,y) = e^x \operatorname{cos}(y)$ es armónica en $\mathbb{C}$.
Es claro que dicha función real es de clase $C^\infty(\mathbb{C})$. Tenemos que: \begin{equation*} \frac{\partial u}{\partial x} = e^x \operatorname{cos}(y), \quad \frac{\partial u}{\partial y} = – e^x \operatorname{sen}(y), \end{equation*}para todo $z=x+iy\in\mathbb{C}$, por lo que: \begin{equation*} \frac{\partial^2 u}{\partial x^2} = e^x \operatorname{cos}(y), \quad \frac{\partial^2 u}{\partial y^2} = -e^x \operatorname{cos}(y), \end{equation*}entonces: \begin{align*} \nabla^2 u & = \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2}\\ & = e^x \operatorname{cos}(y) – e^x \operatorname{cos}(y)\\ & = 0. \end{align*}
Por lo tanto, $u(x,y) = e^x \operatorname{cos}(y)$ es una función armónica.
Procedemos ahora a determinar a su función armónica conjugada $v(x,y)$, para ello hacemos uso de las ecuaciones de C-R. Sabemos que: \begin{equation*} \frac{\partial v}{\partial x} = -\frac{\partial u}{\partial y} = e^x \operatorname{sen}(y). \end{equation*}
Integrando respecto a $x$ la igualdad anterior, tenemos que: \begin{align*} v(x,y) & = \int e^x \operatorname{sen}(y) \, dx\\ & = e^x \operatorname{sen}(y) + f(y). \end{align*}
Derivando respecto a $y$ tenemos que: \begin{equation*} \frac{\partial v}{\partial y} = e^x \operatorname{cos}(y) + f'(y). \end{equation*}
Por otra parte, considerando las ecuaciones de C-R sabemos que: \begin{equation*} \frac{\partial v}{\partial y} = \frac{\partial u}{\partial x} = e^x \operatorname{cos}(y), \end{equation*}por lo que, igualando estas dos últimas ecuaciones tenemos que: \begin{equation*} e^x \operatorname{cos}(y) + f'(y) = e^x \operatorname{cos}(y) \quad \Longleftrightarrow \quad f'(y) = 0, \end{equation*}por lo que $f(y) = c\in\mathbb{R}$. Entonces: \begin{equation*} v(x,y) = e^x \operatorname{sen}(y) + c. \end{equation*}
Es claro que dicha función también es armónica. Por construcción es claro que las funciones $u$ y $v$ satisfacen las ecuaciones de C-R, por lo que, considerando la proposición 40.2 concluimos que la función: \begin{align*} f(z) & = u(x,y) + iv(x,y)\\ & = e^x \operatorname{cos}(y) + ie^x \operatorname{sen}(y) + ic\\ & = e^{x+iy} + a, \end{align*}con $a = ic\in\mathbb{C}$ una constante, es una función analítica.
Ejemplo 40.2. Dado que la función $f(z) = \dfrac{2i}{z^2}$ es analítica en $\mathbb{C}\setminus\{0\}$ y como: \begin{equation*} \frac{2i}{z^2} = \frac{2i}{z^2} \frac{\overline{z}^2}{\overline{z}^2} = \frac{2i\overline{z}^2}{\left(z\overline{z}\right)^2} = \frac{2i\overline{z}^2}{|\,z\,|^4} = \frac{4xy+i2(x^2-y^2)}{(x^2+y^2)^2}, \end{equation*}entonces las funciones: \begin{equation*} u(x,y)= \frac{4xy}{(x^2+y^2)^2} \quad \text{y} \quad v(x,y)= \frac{i2(x^2-y^2)}{(x^2+y^2)^2}, \end{equation*}son armónicas conjugadas en cualquier dominio del plano complejo $\mathbb{C}$ que no contenga al origen.
Ejemplo 40.3. Sean $z=x+iy\in\mathbb{C}$ y $u(z) = 3xy^2-x^3$. Veamos que $u$ es una función armónica en $\mathbb{C}$ y determinemos a su armónica conjugada $v$ en $\mathbb{C}$, tal que $v(0,0)=1$.
Solución. Claramente la función real $u$ es de clase $C^\infty(\mathbb{C})$. Tenemos que: \begin{align*} \nabla^2 u(z) & = \frac{\partial^2 u(x,y)}{\partial x^2} + \frac{\partial^2 u(x,y)}{\partial y^2}\\ & = -6x+6x\\ & = 0, \end{align*}por lo que $u$ es armónica en $\mathbb{C}$.
Del teorema 40.1 se sigue que existe una función armónica conjugada $v$, de $u$, en $D$. Más aún, la condición $v(0,0)=1$ garantiza que $v$ es única.
De las ecuaciones de C-R se sigue que: \begin{equation*} \frac{\partial v(x,y)}{\partial x} = -\frac{\partial u(x,y)}{\partial y} = -6xy \quad \text{y} \quad \frac{\partial v(x,y)}{\partial y} =\frac{\partial u(x,y)}{\partial x} = 3y^2 – 3x^2. \end{equation*}
Integrando respecto a $x$ la primera igualdad tenemos que: \begin{equation*} v(x,y) = \int -6xy dx = -3x^2 y + \varphi(y), \end{equation*}por lo que: \begin{equation*} \frac{\partial v(x,y)}{\partial y} = -3x^2 y + \varphi'(y) = 3y^2 – 3x^2. \end{equation*}
Por lo tanto $v(x,y) = -3x^2y+y^3+c$, pero como $v(0,0)=1$, se tiene que $c=1$, entonces: \begin{equation*} v(x,y) = -3x^2y+y^3+1. \end{equation*}
Notemos que $f(z) = u(x,y)+iv(x,y)$ es el polinomio complejo $f(z) = -z^3+i$.
Observación 40.4. Si $v(x,y)$ es una función armónica de $u(x,y)$ en algún dominio $D\subset\mathbb{C}$, en general no se cumple que $u(x,y)$ sea una función armónica de $v(x,y)$ en dicho dominio.
Ejemplo 40.4. Consideremos a la función $f(z)=z^2$, para $z=x+iy\in\mathbb{C}$ tenemos que sus componentes real e imginaria son, respectivamente: \begin{equation*} u(x,y)=x^2-y^2 \quad \text{y} \quad v(x,y)=2xy. \end{equation*}
Dado que $f(z)$ es una función entera, es claro que $v(x,y)$ es una función armónica de $u(x,y)$, sin embargo veamos que $u(x,y)$ no es una función armónica de $v(x,y)$.
Solución. Consideremos a la función: \begin{equation*} g(z) = 2xy + i(x^2-y^2) := U(x,y) + iV(x,y). \end{equation*}
Mediante las ecuaciones de C-R tenemos que: \begin{equation*} \frac{\partial U}{\partial x} = 2y \neq – 2y =\frac{\partial V}{\partial y}, \quad \frac{\partial U}{\partial y} = 2x \neq -2x = \frac{\partial V}{\partial x}, \end{equation*}para todo $z=x+iy\neq 0$.
Por lo tanto, $g$ solo es diferenciable en el origen, pero no es analítica en ningún punto, de donde concluimos que $u(x,y)$ no es una función armónica de $v(x,y)$.
Ejemplo 40.5. Sea $D\subset\mathbb{C}$ un dominio acotado con frontera $\partial D$. Si $u,v:\overline{D}\to\mathbb{R}$ son dos funciones armónicas en $D$ y continuas en $\overline{D}$, tales que $u=v$ en $\partial D$, veamos que $u=v$ en $D$.
Solución. Definimos a la función $g:\overline{D} \to\mathbb{R}$ como: \begin{equation*} g(z) = u(z) – v(z). \end{equation*}
Por construcción $g$ es una función continua en $\overline{D}$ y armónica en $D$, tal que $g(z) = 0$ para todo $z\in \partial D$. Por el corolario 40.3, $g$ alcanza su máximo en algún valor de $\partial D$, por lo que $g(z)\leq 0$ para todo $z\in D$. Análogamente, para la función $-g(z)$ se tiene que $g(z) \geq 0$ para todo $z\in D$, por lo que $u(z)= v(z)$ para todo $z\in D$.
Definición 40.4. (Sistema de curvas ortogonales.) Sean $c_1, c_2 \in\mathbb{R}$ dos constantes. Dos familias de curvas: \begin{equation*} u(x,y) = c_1, \quad v(x,y) = c_2, \tag{40.4} \end{equation*}en el plano cartesiano, se dice que forman un sistema de curvas ortogonales si en los puntos de intersección, entre cada curva de cada familia, dichas curvas forman ángulos rectos.
La definición anterior nos permite caracterizar a las funciones analíticas en algún dominio $D$. Supongamos que $f(z) = u(x,y) + iv(x,y)$ es una función analítica en $D$, entonces la parte real y la parte imaginaria de la función $f(z)$ nos permiten definir un sistema de curvas ortogonales considerando a las curvas de nivel dadas por las ecuaciones (40.4). De forma más precisa, en un punto de intersección $z_0 = x_0 + iy_0$ tal que $f'(z_0) \neq 0$, la recta tangente a la curva de nivel $u(x_0,y_0) = c_1$, digamos $L_1$, y la recta tangente a la curva de nivel $v(x_0,y_0) = c_2$, digamos $L_2$, son perpendiculares.
Notemos que si derivamos a $u(x,y) = c_1$ y a $v(x,y) = c_2$ con respecto a $x$, considerando la regla de la cadena, tenemos que: \begin{equation*} \frac{\partial u}{\partial x} + \frac{\partial u}{\partial y} \frac{dy}{dx} = 0 \quad \text{y} \quad \frac{\partial v}{\partial x} + \frac{\partial v}{\partial y} \frac{dy}{dx} = 0, \end{equation*}de donde obtenemos las pendientes de las rectas tangentes a cada curva, digamos: \begin{equation*} m_1 = \frac{dy}{dx} = – \dfrac{\frac{\partial u}{\partial x}}{\frac{\partial u}{\partial y}} \quad \text{y} \quad m_2 = \frac{dy}{dx} = – \dfrac{\frac{\partial v}{\partial x}}{\frac{\partial v}{\partial y}}. \end{equation*}
Recordemos que dos rectas, en este caso $L_1$ y $L_2$, son perpendiculares si $m_1 m_2 = -1$, es decir: \begin{equation*} \left(- \dfrac{\frac{\partial u}{\partial x}}{\frac{\partial u}{\partial y}}\right) \left(- \dfrac{\frac{\partial v}{\partial x}}{\frac{\partial v}{\partial y}}\right) = -1, \end{equation*}o equivalentemente si: \begin{equation*} \frac{\partial u}{\partial x} \cdot \frac{\partial v}{\partial x} + \frac{\partial u}{\partial y} \cdot \frac{\partial v}{\partial y} = 0. \end{equation*}
La cual es la condición que deben satisfacer dos familias de curvas que se intersecan ortogonalmente. Considerando lo anterior es fácil probar el siguiente resultado:
Proposición 40.3. Si $f(z) = u(x,y) + iv(x,y)$ es una función analítica, entonces las familias de curvas dadas por $u(x,y) = c_1$ y $v(x,y) = c_2$ forman un sistema ortogonal.
Demostración. Dadas las hipótesis, como $f(z) = u(x,y) + iv(x,y)$ es una función analítica, entonces las funciones $u$ y $v$ satisfacen las ecuaciones de C-R, es decir: \begin{equation*} \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y} \quad \text{y} \quad \frac{\partial v}{\partial x} = – \frac{\partial u}{\partial y}. \end{equation*}
Multiplicando estas ecuaciones tenemos: \begin{equation*} \frac{\partial u}{\partial x} \cdot \frac{\partial v}{\partial x} = – \frac{\partial v}{\partial y} \cdot \frac{\partial u}{\partial y}, \end{equation*}de donde: \begin{equation*} \frac{\partial u}{\partial x} \cdot \frac{\partial v}{\partial x} + \frac{\partial v}{\partial y} \cdot \frac{\partial u}{\partial y} = 0, \end{equation*}la cual es la condición de ortogonalidad para una familia de curvas $u(x,y) = c_1$ y $v(x,y) = c_2$ que se intersecan.
$\blacksquare$
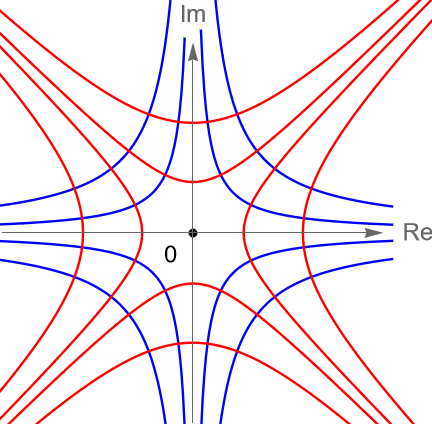
Ejemplo 40.6. Consideremos a la función compleja $f(z)=z^2$. Si $z=x+iy$, entonces $f(z) = x^2 – y^2 + i2xy$, por lo que: \begin{equation*} u(x,y) = x^2 – y^2 \quad \text{y} \quad v(x,y) = 2xy. \end{equation*}
Para esta función las familias de curvas de nivel dadas por: \begin{equation*} x^2 – y^2 = c_1 \quad \text{y} \quad 2xy = c_2, \end{equation*}son dos familias de hipérbolas, figura 146(a). Dado que la función $f(z)=z^2$ es entera, entonces por la proposición 40.3 sabemos que dichas familias de curvas forman un sistema ortogonal.
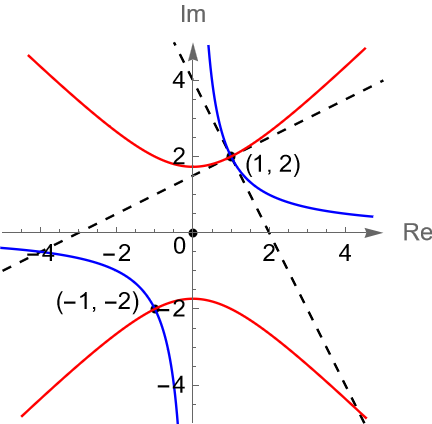
Considerando al punto $z_0 = 1+2i$ tenemos que: \begin{align*} 1^2 – 2^2 = -3 = c_1,\\ 2(1)(2) = 4 = c_2, \end{align*}cuyas curvas correspondientes son $x^2 – y^2 = -3$ y $2xy = 4$, figura 146(b). Gráficamente podemos observar que dichas curvas son ortogonales en el punto $z_0 = 1 + 2i$ y por simetría de la curva es claro que también son ortogonales en el punto $z_0 = -1 -2i$.
Figura 146: Gráficas de un sistema de curvas ortogonales en el plano complejo.
(a) Familia de curvas ortogonales dadas por las hipérbolas $x^2 – y^2 = c_1$ y $2xy = c_2$.(b) Las curvas de nivel correspondientes a las hipérbolas $x^2 – y^2 = -3$ y $2xy = 4$ son ortogonales en el punto de intersección $(1,2)$.
En este punto es conveniente dar una interpretación geométrica de la propiedad de conformidad de una función analítica $f:D \to\mathbb{C}$, con $D\subset\mathbb{C}$ un dominio. Si $z_0\in D$ y $f'(z_0)\neq 0$, entonces por la proposición 18.1 podemos escribir a $f$ como: \begin{equation*} f(z) = f(z_0) + f'(z_0)(z-z_0) + \varepsilon(z)(z-z_0), \end{equation*}donde $\varepsilon(z) \to 0$ si $z \to z_0$.
Si $z \in B(z_0,r)$, para algún $r>0$, entonces la transformación $f(z)$ tiene como mejor aproximación lineal a la transformación: \begin{equation*} T(z) = A + B(z-z_0), \tag{40.4} \end{equation*}donde $A=f(z_0)$ y $B=f'(z_0)$.
Dado que $\varepsilon(z) \to 0$ si $z \to z_0$, entonces para los puntos en $B(z_0,r)$ el comportamiento de la transformación $f(z)$ es similar al de la transformación $T(z)$.
Recordemos, proposición 12.1, que podemos expresar a $f$ como $f(z) = u(x,y) + iv(x,y)$, donde $\operatorname{Re}f(z) = u(x,y)$ e $\operatorname{Im}f(z) = v(x,y)$ son dos funciones reales. Por lo que, podemos considerar a $f$ como una función de un abierto $U\subset\mathbb{R}^2$ en $\mathbb{R}^2$.
De acuerdo con nuestros cursos de Cálculo, sabemos que para una función $f:U\subset\mathbb{R}^2 \to\mathbb{R}^2$, con $U$ un abierto, el comportamiento de la derivada de $f$ está descrito por su matriz Jacobiana: \begin{equation*} J_f = \begin{pmatrix} u_x & u_y\\ v_x & v_y \end{pmatrix}, \end{equation*}la cual está evaluada en cada punto $z_0 = (x_0,y_0) \in U$.
Más aún, sabemos que la matriz Jacobiana representa a una transformación lineal que es la mejor aproximación de $f(z) – f(z_0)$ en el punto $z_0$.
De acuerdo con los resultados de la entrada 18, sabemos que para una función analítica $f$, definida en un abierto $U\subset\mathbb{C}$, su matriz Jacobiana en un punto $z_0\in U$ es de la forma: \begin{equation*} J_{f(z_0)} = \begin{pmatrix} u_x(z_0) & u_y(z_0)\\ v_x(z_0) & v_y(z_0) \end{pmatrix} = \begin{pmatrix} u_x(z_0) & -v_x(z_0)\\ v_x(z_0) & u_x(z_0) \end{pmatrix} = \begin{pmatrix} a & -b\\ b & a \end{pmatrix}, \end{equation*}donde $a, b\in\mathbb{R}$ son constantes.
Notemos que la última matriz podría ser la matriz cero o, en caso contrario, podría ser una matriz que puede escribirse como el producto de dos matrices, es decir: \begin{equation*} \begin{pmatrix} a & -b\\ b & a \end{pmatrix} = \begin{pmatrix} \sqrt{a^2+b^2} & 0\\ 0 & \sqrt{a^2+b^2} \end{pmatrix} \begin{pmatrix} \operatorname{cos}(\theta) & -\operatorname{sen}(\theta)\\ \operatorname{sen}(\theta) & \operatorname{cos}(\theta) \end{pmatrix}, \end{equation*}para algún $\theta\in\mathbb{R}$. Notemos que podemos elegir a $\theta$ tal que: \begin{align*} \operatorname{cos}(\theta) = \frac{a}{\sqrt{a^2+b^2}},\\ \operatorname{sen}(\theta) = \frac{b}{\sqrt{a^2+b^2}}, \end{align*}desde que: \begin{equation*} \left(\frac{a}{\sqrt{a^2 + b^2}}\right)^2 + \left(\frac{b}{\sqrt{a^2 + b^2}}\right)^2 = 1. \end{equation*}
Entonces, las ecuaciones de C-R implican que la matriz Jacobiana (real) de $f$ sea de la forma: \begin{equation*} \begin{pmatrix} \lambda & 0\\ 0 & \lambda \end{pmatrix} \begin{pmatrix} \operatorname{cos}(\theta) & -\operatorname{sen}(\theta)\\ \operatorname{sen}(\theta) & \operatorname{cos}(\theta) \end{pmatrix}, \end{equation*}para algún $\lambda\in\mathbb{R}$, con $\lambda>0$, y algún $\theta\in\mathbb{R}$.
Por nuestros cursos de Geometría, sabemos que estas dos matrices tienen una interpretación geométrica clara.
Primeramente, la matriz: \begin{equation*} \begin{pmatrix} \lambda & 0\\ 0 & \lambda \end{pmatrix}, \end{equation*}describe la multiplicación de todos los vectores en $\mathbb{R}^2$ por el escalar $\lambda$, es decir una homotecia por un factor $\lambda$.
Por otra parte, la matriz: \begin{equation*} \begin{pmatrix} \operatorname{cos}(\theta) & -\operatorname{sen}(\theta)\\ \operatorname{sen}(\theta) & \operatorname{cos}(\theta) \end{pmatrix}, \end{equation*}describe una rotación, alrededor del origen, de un ángulo $\theta$.
Entonces, en conjunto el producto de ambas matrices, es decir: \begin{equation*} \begin{pmatrix} \lambda & 0\\ 0 & \lambda \end{pmatrix} \begin{pmatrix} \operatorname{cos}(\theta) & -\operatorname{sen}(\theta)\\ \operatorname{sen}(\theta) & \operatorname{cos}(\theta) \end{pmatrix}, \end{equation*}describe en $\mathbb{R}^2$ la misma operación que la multiplicación en $\mathbb{C}$ por un número complejo $\lambda e^{i\theta}$, como vimos en la entrada 24.
En particular notemos que para la matriz Jacobiana de una función analítica $f$, en cualquier punto $z\in U$, se tiene que: \begin{equation*} \lambda = \sqrt{u_x(z)^2 + v_x(z)^2} = |f'(z)|. \end{equation*}
Por lo tanto, el efecto de la transformación afín lineal $T$, dada en (40.4), es una rotación en el plano en un ángulo $\theta=\operatorname{arg}(f'(z_0))$, seguida de una homotecia por un factor $\lambda = |f'(z_0)|$, seguida de una traslación por un vector $A-Bz_0$. Por la proposición 25.2 sabemos que la transformación $T$ preserva los ángulos en $z_0$.
Entonces, motivados en lo anterior, nuestro objetivo es probar que la función analítica $f$ también preserva ángulos en $z_0$.
Definición 40.5. (Ángulo entre curvas.) Sean $\alpha:I_1\subset\mathbb{R} \to\mathbb{C}$ y $\beta:I_2\subset\mathbb{R} \to\mathbb{C}$ dos curvas suaves tales que $\alpha(t_0) =\beta(u_0)=z_0$, con $t_0\in I_1$ y $u_0\in I_2$. Si $\alpha'(t_0) \neq 0$ y $\beta'(u_0)\neq 0$, se define el ángulo formado por $\alpha$ y $\beta$ en $z_0$ como el ángulo entre sus vectores tangentes.
De acuerdo con el lema 25.1 tenemos que dicho ángulo está dado por: \begin{equation*} \operatorname{arg}\left(\frac{\alpha'(t_0)}{\beta'(u_0)}\right). \end{equation*}
Definición 40.6. (Función conforme.) Sean $D\subset\mathbb{C}$ un dominio, $z_0\in D$ y $f:D\to\mathbb{C}$ una función. Se dice que $f$ es conforme en $z_0$ si para todo par de curvas $\alpha$ y $\beta$ que se intersecan en $z_0$ y que en dicho punto forman un ángulo $\theta\in(-\theta, \theta]$, se tiene que las curvas $f\circ \alpha$ y $f\circ \beta$ forman el mismo ángulo $\theta$ en el punto $f(z_0)$.
Proposición 40.4. Sean $D\subset\mathbb{C}$ un dominio y $f:D\subset\mathbb{C}\to\mathbb{C}$ una función analítica en $z_0\in D$. Si $f'(z_0) \neq 0$, entonces $f$ es conforme en $z_0$.
Demostración. Dadas las hipótesis, sin pérdida de generalidad, sean $\gamma, \beta:[a,b]\subset\mathbb{R}\to\mathbb{C}$, $a<b$ dos curvas suaves tales que $\gamma(t_0) = \beta(t_0) =z_0$, para algún $t_0\in[a,b]$ y $\gamma'(t_0) \neq 0$, $\beta'(t_0) \neq 0$.
Notemos que $f\circ \gamma, f\circ \beta : [a,b]\to\mathbb{C}$ son dos curvas en $\mathbb{C}$. Por la regla de la cadena, proposición 32.2, tenemos que: \begin{align*} (f\circ\gamma)'(t_0) & = f'(\gamma(t_0)) \gamma'(t_0) = f'(z_0) \gamma'(t_0) \neq 0,\\ (f\circ\beta)'(t_0) & = f'(\beta(t_0)) \beta'(t_0) = f'(z_0) \beta'(t_0) \neq 0, \end{align*}por lo que podemos medir el ángulo entre dichas curvas en $z_0$.
Ejemplo 40.7. De acuerdo con la proposición 40.4, como $f(z)=e^{z}$ es una función entera y $f'(z)=e^{z}\neq 0$ para todo $z\in \mathbb{C}$, entonces $f$ es una función conforme en todo $\mathbb{C}$.
Por otra parte, $g(z)=z^2-z+1$ también es una función entera, pero $g'(1/2)=0$, por lo que $g$ es conforme en $\mathbb{C}\setminus\{1/2\}$.
Tarea moral
Sean $z=x+iy \neq 0$, $u(x,y)=x^2-y^2$ y $v(x,y)=-\dfrac{y}{x^2+y^2}$. Muestra que $u$ y $v$ satisfacen la ecuación de Laplace (33.1), pero que la función $f(z)=u(x,y)+iv(x,y)$ no es analítica. Hint: Considera la proposición 40.2.
Determina una función analítica $f(z)=u(x,y)+iv(x,y)$ y su dominio de analicidad, para: a) $u(x,y) = \dfrac{\operatorname{sen}(2x)}{\operatorname{cosh}(2y) + \operatorname{cos}(2x)}$. b) $u(x,y) = x^2+y^2-5x+y+2$. c) $v(x,y) = e^{x}\operatorname{sen}(x)$. d) $v(x,y) = \operatorname{sen}(x) \operatorname{cosh}(y)$.
Sean $a,b\in\mathbb{R}$ y $U\subset\mathbb{C}$ un conjunto abierto. Supón que $u(x,y)$ y $v(x,y)$ son dos funciones reales armónicas en $U$. Prueba que $au(x,y)+bv(x,y)$ también es una función armónica en $U$.
Muestra que las siguientes funciones reales $u(x,y)$ son armónicas en el dominio $D$ dado. Determina la función armónica conjungada de $u$ en $D$, es decir, una función real $v(x,y)$ y verifica que la función $f(z)=u(x,y)+iv(x,y)$ es analítica en $D$. a) $u(x,y) = xy$, en $D=\mathbb{C}$. b) $u(x,y) = e^y \operatorname{cos}(x)$, en $D=\mathbb{C}$. c) $u(x,y) = \dfrac{y}{x^2+y^2}$, en $D=\left\{z\in\mathbb{C} : \operatorname{Im}(z)>0\right\}$. d) $u(x,y) = \operatorname{ln}(x^2+y^2)$, en $D=\mathbb{C}\setminus(-\infty, 0]$.
Sea $f(z)$ una función conforme en un dominio $D$ tal que $f'(z)\neq 0$ para todo $z\in D$. Prueba que $f$ es analítica en $D$.
Prueba que la transformación $T(z) = az+b$ es conforme en infinito si $a\neq 0$.
Supón que $u(x,y)$es una función real armónica. Muestra que: \begin{equation*} \frac{\partial^2 u}{\partial z \partial \overline{z}} = 0. \end{equation*}
Considera a la función $f(z)=\operatorname{sen}(z)$. Muestra que $\operatorname{Re}f(z) = c_1$ y $\operatorname{Im}f(z) = c_2$, con $c_1, c_2\in\mathbb{R}$ constantes, forman una familia de curvas ortogonales. Hint: Utiliza la proposición 22.1(10) y muestra que $m_1 \cdot m_2 =-1$, con $m_i = \dfrac{dy}{dx}$, $i=1,2$.
Demuestra la proposición 40.2.
Más adelante…
En esta entrada hemos abordado de manera general el concepto de funcion armónica y de función conforme, así como algunas de sus propiedades más importantes. Vimos que las funciones armónicas nos permiten construir funciones analíticas, mientras que las funciones conformes nos dicen mucho sobre la geometría de las funciones analíticas. Las funciones armónicas son soluciones de muchos problemas físicos. Algunas de sus aplicaciones se da en modelos de dos dimensiones para el flujo de calor, electrostática y fluidos.
La siguiente entrada corresponde con la última de esta cuarta unidad, en ella abordaremos algunas técnicas para construir funciones analíticas.
En la entrada anterior establecimos una versión local, para discos, del teorema integral de Cauchy y vimos que una primera consecuencia de este resultado es la fórmula integral de Cauchy, la cual nos permitió establecer la existencia de las derivadas de todos los órdenes de una función analítica en un dominio.
En esta entrada probaremos algunas otras consecuencias de este teorema tan importante en el Análisis Complejo, como el teorema de Liouville, el teorema Fundamental del Álgebra, el teorema de Morera, entre otros.
Proposición 37.1. (Desigualdad de Cauchy.) Sean $D\subset\mathbb{C}$ un dominio, $f:D\to\mathbb{C}$ una función analítica en $D$, $z_0\in D$ y $r>0$ tal que $C(z_0, r) \subset D$. Entonces: \begin{equation*} \left| f^{(n)}(z_0)\right| \leq \frac{n! M_r}{r^n}, \quad \forall n\in\mathbb{N}, \end{equation*}donde $M_r:=\max\limits_{z\in C(z_0,r)}|f(z)|$.
Demostración. Dadas las hipótesis, sea $M_r:=\max\limits_{z\in C(z_0,r)}|f(z)|$.
Como $f$ es analítica en $D$, en particular lo es en $z_0$, por lo que de la proposición 36.5 tenemos que las derivadas de todos los ordenes de $f$ en $z_0$ existen en el interior de la circunferencia $C(z_0, r) \subset D$ y están dadas por: \begin{equation*} f^{(n)}(z_0) = \frac{n!}{2\pi i}\int_{C(z_0, r)} \frac{f(z)}{(z-z_0)^{n+1}} dz, \end{equation*}por lo que, de la proposición 34.3(5) se sigue que: \begin{align*} \left|f^{(n)}(z_0)\right| & = \left|\frac{n!}{2\pi i}\int_{C(z_0, r)} \frac{f(z)}{(z-z_0)^{n+1}} dz\right|\\ & = \frac{n!}{2\pi} \left|\int_{C(z_0, r)} \frac{f(z)}{(z-z_0)^{n+1}} dz\right|\\ & \leq \frac{n!}{2\pi} \int_{C(z_0, r)} \frac{\left|f(z)\right|}{\left|z-z_0\right|^{n+1}}\,|dz|\\ & \leq \frac{n!}{2\pi} \frac{M_r}{r^{n+1}} \int_{C(z_0, r)} |dz|\\ & = \frac{n!}{2\pi} \frac{2\pi r M_r}{r^{n+1}}\\ & = \frac{n! M_r}{r^n}. \end{align*}
$\blacksquare$
Teorema 37.1. (Teorema de Liouville.) Sea $f:\mathbb{C} \to \mathbb{C}$ una función entera y acotada. Entonces $f$ es constante. \begin{proof} Dadas las hipótesis, tenemos que $f$ es analítica en todo punto del plano complejo. Sea $\zeta\in\mathbb{C}$ un punto arbitrario. De acuerdo con la desigualdad de Cauchy, para todo $n\in\mathbb{N}$ se cumple que: \begin{equation*} \left| f^{(n)}(\zeta)\right| \leq \frac{n! M_r}{r^n}, \end{equation*}donde $M_r=\max\limits_{z\in C(\zeta,r)}|f(z)|$.
Como $f$ es acotada, entonces existe una constante $M$ tal que $M_r \leq M$ para todo $z\in\mathbb{C}$. Entonces para $n=1$ se tiene que: \begin{equation*} \left| f'(\zeta)\right| \leq \frac{M}{r}. \end{equation*}
Lo anterior se cumple para todo $r>0$, por lo que tomando el límite cuando $r\to\infty$ se sigue que: \begin{equation*} |f'(\zeta)| = 0 \quad \Longrightarrow \quad f'(\zeta)=0. \end{equation*}
Dado que $\zeta\in\mathbb{C}$ es arbitrario, para todo $z\in\mathbb{C}$ se cumple que $f'(z)=0$ y como $f$ es entera, entonces, de la proposición 19.2 se sigue que $f$ es constante.
$\blacksquare$
Corolario 37.1. Toda función no constante y entera no es acotada.
Demostración. Es inmediato del teorema de Liouville.
$\blacksquare$
Ejemplo 37.1. La función $\operatorname{sen}(z)$ es entera y no es constante, por lo que no es acotada.
Corolario 37.2. Sea $f:\mathbb{C} \to \mathbb{C}$ una función entera tal que $f(z)=u(x,y)+iv(x,y)$. Si $u(x,y)$ es acotada para todo $z=x+iy\in\mathbb{C}$, entonces $u(x,y)$ y $v(x,y)$ son funciones constantes.
Demostración. Dadas las hipótesis, sea $|u(x,y)|\leq M$ para todo $z=x+iy\in\mathbb{C}$. Definimos a la función: \begin{equation*} g(z) = e^{f(z)}. \end{equation*}
Claramente $g$ es una función entera tal que $g(z)\neq 0$ para todo $z\in\mathbb{C}$. Por la proposición 20.2(4) tenemos que: \begin{equation*} \left|g(z)\right|=\left|e^{f(z)}\right| = e^{u(x,y)} \leq e^M, \quad \forall z\in\mathbb{C}, \end{equation*}es decir $g$ es una función acotada y entera, por lo que del teorema de Liouville se sigue que $g$ es una función constante y por tanto $f$ es función constante, por lo que $u(x,y)$ y $v(x,y)$ son constantes.
$\blacksquare$
Ejemplo 37.2. Sean $f,g:\mathbb{C}\to\mathbb{C}$ dos funciones enteras, tales que $g(z)\neq 0$ y $|f(z)|\leq |g(z)|$ para todo $z\in\mathbb{C}$. Veamos que existe una constante $c\in\mathbb{C}$ tal que $f(z)=c g(z)$.
Solución. Definimos a la función: \begin{equation*} h(z) := \frac{f(z)}{g(z)}, \end{equation*}como $g(z)\neq 0$ para todo $z\in\mathbb{C}$, entonces $h$ está bien definida en $\mathbb{C}$ y es una función entera por ser el cociente de dos funciones enteras. Por hipótesis tenemos que: \begin{equation*} |h(z)| = \left| \frac{f(z)}{g(z)} \right| = \frac{|f(z)|}{|g(z)|} \leq 1, \quad \forall z \in \mathbb{C}, \end{equation*}es decir, $h$ es una función acotada y entera, por lo que del teorema de Liouville se sigue que $h(z)=c$, para algún $c\in\mathbb{C}$, entonces $f(z) = c g(z)$.
Teorema 37.2. (Teorema Fundamental del Álgebra.) Todo polinomio complejo $p(z)$ de grado mayor o igual a $1$, tiene al menos una raíz en $\mathbb{C}$, es decir, existe $z_0\in\mathbb{C}$ tal que $p(z_0) = 0$.
Demostración. Dadas las hipótesis, procedemos por contradicción. Supongamos que: \begin{equation*} p(z) = c_0 + c_1 z + \cdots + c_{n-1} z^{n-1} + c_n z^n \neq 0, \end{equation*}para todo $z\in\mathbb{C}$. Como $p$ es de grado $n\geq 1$, entonces $c_n \neq 0$ y $|c_n|>0$.
Consideremos a la función $f(z)=1/p(z)$, la cual está bien definida y es una función entera. Por la desigualdad del triángulo tenemos que: \begin{align*} \left|f(z)\right| & = \left|\frac{1}{p(z)}\right|\\ & = \dfrac{1}{|z|^n} \dfrac{1}{\left|\dfrac{c_0}{z^n} + \dfrac{c_1}{z^{n-1}} + \ldots + \dfrac{c_{n-2}}{z^2} + \dfrac{c_{n-1}}{z} + c_n\right|}\\ & \leq \dfrac{1}{|z|^n} \dfrac{1}{\left|\dfrac{c_0}{z^n}\right| + \left|\dfrac{c_1}{z^{n-1}}\right| + \ldots + \left|\dfrac{c_{n-2}}{z^2}\right| + \left|\dfrac{c_{n-1}}{z}\right| + |c_n|}. \end{align*}
Por lo que, si $n>k$, entonces: \begin{equation*} \lim_{|z|\to\infty} \left|\dfrac{c_{k}}{z^{n-k}}\right| = \lim_{|z|\to\infty} \dfrac{|c_{k}|}{|z|^{n-k}} =0, \end{equation*}de donde: \begin{equation*} \lim_{|z|\to\infty} \left(\left|\dfrac{c_0}{z^n}\right| + \left|\dfrac{c_1}{z^{n-1}}\right| + \ldots + \left|\dfrac{c_{n-2}}{z^2}\right| + \left|\dfrac{c_{n-1}}{z}\right| + |c_n|\right) = |c_n| >0, \end{equation*}es decir: \begin{equation*} \lim_{|z|\to\infty} |f(z)| = 0, \end{equation*}entonces, para $\varepsilon=1$ existe $R\in\mathbb{R}$ tal que: \begin{equation*} R\leq |z| \quad \Longrightarrow \quad |f(z)| \leq 1. \end{equation*}
Por otra parte, dado que el disco cerrado $\overline{B(0,R)}$ es un conjunto compacto y la función real: \begin{equation*} |f(z)|=\sqrt{u^2(x,y) + v^2(x,y)}, \end{equation*}es una función continua de las variables $x$ e $y$, entonces, proposición 10.9, $|f(\overline{B(0,R)})|$ es un conjunto compacto, es decir, cerrado y acotado, por lo que existe $K>0$ tal que: \begin{equation*} |f(z)|\leq K, \quad \forall z\in \overline{B(0,R)}. \end{equation*}
Considerando lo anterior, sea $M:=\max\{K,1\}$, entonces para todo $z\in\mathbb{C}$ se cumple que $|f(z)|\leq M$, es decir, $f$ es una función acotada, por lo que del teorema de Liouville se sigue que $f$ debe ser constante, entonces $p$ es constante, lo cual es una contradicción, por lo que existe $z_0 \in \mathbb{C}$ tal que $p(z_0) = 0$.
$\blacksquare$
Corolario 37.3. Un polinomio complejo $p(z) = c_0 + c_1 z + \cdots + c_{n-1} z^{n-1} + c_n z^n$, de grado $n\geq 1$, tiene una factorización: \begin{equation*} p(z) = c(z-z_1)(z-z_2)\cdots(z-z_n), \end{equation*}donde $z_1, z_2, \ldots, z_n$ son las raíces de $p$ y $c\in\mathbb{C}$ es una constante.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Observación 37.1 Debe ser claro que raíces $z_1, z_2, \ldots, z_n$ del polinomio $p$ en el resultado anterior no necesariamente son distintas. En general, los factores de $p$ en el corolario 37.3 pueden agruparse en la forma: \begin{equation*} p(z) = c(z-z_1)^{n_1}(z-z_2)^{n_2}\cdots(z-z_k)^{n_k}, \end{equation*}donde $z_1, z_2, \ldots, z_k$ son raíces de $p$ distintas, $c\in\mathbb{C}$ es una constante y $n_1, n_2, \ldots, n_k$ son números naturales que indican, respectivamente, la multiplicidad de cada raíz de $p$.
Ejemplo 37.3. El polinomio $p(z) = iz(z-1)^2(z+i)^5$ tiene a $z_1 = 0$ como una raíz simple, mientras que $z_2 = 1$ es una raíz doble o de multiplicidad $2$ y $z_3 = -i$ es una raíz de multiplicidad $5$.
Teorema 37.3. (Teorema de Morera.) Sean $D\subset\mathbb{C}$ una región y $f:D \to \mathbb{C}$ una función continua en $D$ tal que: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*}para todo contorno cerrado en $D$. Entonces $f$ es analítica en $D$.
Demostración. Dadas las hipótesis, tenemos que para todo contorno cerrado $\gamma$ en $D$ se cumple que: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*}por lo que, proposición 35.2, existe una primitiva de $f$ en $D$, es decir, existe $F:D\to\mathbb{C}$ analítica tal que $F'(z) = f(z)$ para todo $z\in D$. Por el corolario 36.3, tenemos que $F\in C^\infty(D)$, en particular, $F^{(2)}(z)$ existe y también es analítica en $D$, pero $F^{(2)}(z) = f'(z)$ para todo $z\in D$. Por lo tanto, $f$ es analítica en $D$.
$\blacksquare$
Corolario 37.4. (Teorema de Morera generalizado.) Sean $D\subset\mathbb{C}$ una dominio y $f:D \to \mathbb{C}$ una función continua en $D$ y analítica en $D\setminus\{z_0\}$, para algún $z_0 \in D$. Entonces $f$ es analítica en $D$.
Demostración. Se sigue del teorema integral de Cacuhy generalizado (para discos), teorema 36.4 y del teorema de Morera, por lo que los detalles se dejan como ejercicio al lector.
$\blacksquare$
Observación 37.2. La fórmula integral de Cauchy nos dice cómo el valor $f(z_0)$ es representado por alguna integral de contorno. En particular, si elegimos al contorno de integración $\gamma$ como una circunferencia con centro en $z_0$, entonces podemos ver que el valor de $f(z_0)$ es un tipo de promedio de los valores de $f(z)$ en los puntos $z$ que están sobre dicha circunferencia.
Proposición 37.5. (Teorema del valor medio de Gauss.) Sean $D \subset \mathbb{C}$ un dominio, $f:D\to\mathbb{C}$ una función analítica, $z_0\in D$ fijo y $r>0$ tal que $C(z_0,r) \subset D$, entonces: \begin{equation*} f(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} f(z_0+e^{it}) dt. \tag{37.1} \end{equation*}
Demostración. Dadas las hipótesis, parametrizamos a $C(z_0,r)$ como $\gamma:[0,2\pi]$, dada por $\gamma(t)=z_0+re^{it}$. Por la fórmula integral de Cauchy tenemos que: \begin{align*} f(z_0) & = \frac{1}{2\pi i} \int_{C(z_0,r)} \frac{f(z)}{z-z_0} dz\\ & = \frac{1}{2\pi i} \int_{0}^{2\pi} \frac{f(z_0+e^{it})}{z_0 + re{it} -z_0} ire^{it} dt\\ & = \frac{1}{2\pi} \int_{0}^{2\pi} f(z_0+re^{it}) dt. \end{align*}
$\blacksquare$
Definición 37.1. (Propiedad del valor medio.) Sean $D\subset\mathbb{C}$ un dominio y $f:D\to\mathbb{C}$ una función analítica en $D$. Se dice que $f$ tiene la {\bf propiedad del valor medio} si para todo $z_0\in D$ y $r>0$ tal que $\overline{B}(z_0,r) \subset D$ se cumple que: \begin{equation*} f(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} f(z_0+e^{it}) dt. \end{equation*}
Corolario 37.5. Si $f(z)=u(x,y)+iv(x,y)$ es una función analítica en un dominio $D\subset\mathbb{C}$, entonces las partes real e imaginaria de $f$, es decir, las funciones reales $u(x,y)$ y $v(x,y)$ tienen la propiedad del valor medio en $D$, es decir: \begin{equation*} u(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} u(z_0+e^{it}) dt, \end{equation*} \begin{equation*} v(z_0) = \frac{1}{2\pi} \int_{0}^{2\pi} v(z_0+e^{it}) dt. \end{equation*}
Demostración. Es inmediata de la proposición 37.5 al tomar la parte real e imaginaria en ambos lados de la igualdad (37.1).
$\blacksquare$
Lema 37.1. Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado y $g:[a,b]\to\mathbb{R}$ una función continua en $[a,b]$ tal que $g(x)\geq 0$ para todo $x\in[a,b]$. Si: \begin{equation*} \int_{a}^{b} g(t) dt =0, \end{equation*}entonces $g(x) = 0$ para todo $x\in[a,b]$.
Demostración. Dadas las hipótesis, definimos a la función: \begin{equation*} \varphi(x) = \int_{a}^{x} g(t) dt, \quad \forall x\in[a,b]. \end{equation*}
Por el teorema Fundamental del Cálculo es claro que $\varphi$ es una función diferenciable con derivada: \begin{equation*} \varphi'(x) = g(x), \quad \forall x\in[a,b]. \end{equation*}
Más aún, de las propiedades de la integral real se cumple que: \begin{equation*} 0\leq \varphi(x) = \int_{a}^{x} g(t) dt \leq \int_{a}^{b} g(t) dt = 0, \end{equation*}por lo que $\varphi(x)=0$ y $\varphi'(x)=0$ para todo $x\in[a,b]$, entonces $g(x) = 0$ para todo $x\in[a,b]$.
$\blacksquare$
Teorema 37.4. (Principio del módulo máximo.) Sean $D\subset\mathbb{C}$ un dominio y $f:D\to\mathbb{C}$ una función analítica en $D$. Si existe un punto $z_0 \in D$ tal que $|f(z)|\leq |f(z_0)|$ para todo $z\in D$, es decir, el módulo $|f(z)|$ alcanza su máximo en $z_0$, entonces $f$ es una función constante en $D$.
Demostración. Dadas las hipótesis, de acuerdo con la proposición 19.3, basta probar que $|f(z)|$ es constante en $D$. Consideremos a la función $g:D\to\mathbb{R}$ dada por $g(z)=|f(z)|$. Procedemos a probar que $g$ es constante en $D$.
Notemos que, como $D$ es un dominio, en particular es abierto, por lo que para cada $z\in D$ existe un disco abierto $B(z,\rho)\subset D$. Si $0<r<\rho$, entonces $\overline{B}(z_0,r)\subset B(z_0,\rho) \subset D$. Por lo que, de la proposición 37.5 se cumple que: \begin{equation*} f(z) = \frac{1}{2\pi} \int_{0}^{2\pi} f(z+re^{it}) dt, \end{equation*}de donde: \begin{align*} g(z) & = |f(z)|\\ & = \left|\frac{1}{2\pi} \int_{0}^{2\pi} f(z+re^{it}) dt\right|\\ & \leq \frac{1}{2\pi} \int_{0}^{2\pi} \left|f(z+re^{it}) \right| dt\\ & = \frac{1}{2\pi} \int_{0}^{2\pi} g(z+re^{it}) dt, \tag{37.2} \end{align*}para cualquier $0<r<\rho$.
Sea $M=g(z_0) = |f(z_0)|\geq 0$ y definimos a los conjuntos: \begin{equation*} U:=\{z\in D : g(z) = M\}, \quad V:=\{z\in D : g(z) < M\}. \end{equation*}
Entonces $D = U \cup V$ y $U \cap V = \emptyset$. Veamos que $V = \emptyset$. Para ello probemos que $U$ y $V$ son ambos abiertos y utilicemos el hecho de que $D$ es conexo.
Sea $z\in U$ y $\rho>0$ tal que se cumple (37.2) para $0<r<\rho$. Notemos que para $r$ fijo en este intervalo, como $z\in U$ y $g(z) \leq M$ para todo en $z\in D$, entonces se cumple que: \begin{equation*} M = g(z) \leq \frac{1}{2\pi} \int_{0}^{2\pi} g(z+re^{it}) dt \leq \frac{1}{2\pi} \int_{0}^{2\pi} M dt = M. \end{equation*}
Por lo que: \begin{equation*} \frac{1}{2\pi} \int_{0}^{2\pi} g(z+re^{it}) dt = \frac{1}{2\pi} \int_{0}^{2\pi} M dt, \end{equation*}es decir: \begin{equation*} \frac{1}{2\pi} \int_{0}^{2\pi} \left[ M – g(z+re^{it}) \right] dt = 0. \end{equation*}
Dado que $h(t)=M-g(z+re^{it}) \geq 0$ para todo $t\in[0,2\pi]$ y $g$ es una función continua, entonces por el lema 37.1 concluimos que: \begin{equation*} M = g(z+re^{it}), \end{equation*}para todo $t\in[0,2\pi]$, por lo que $z+re^{it} \in U$. Es decir, la circunferencia con centro en $z$ y radio $r$ está contenida en $U$. Como esto se cumple para todo $r\in(0,\rho)$, concluimos que el disco abierto $B(z,\rho)$ está contendio en $U$. Dado que $z$ es un punto arbitrario de $U$, entonces $U$ es un conjunto abierto.
Ahora supongamos que $z\in V$, entonces $g(z)<M$. Puesto que $g$ es una función continua en $D$, en particular lo es en $z$, por lo que para $\varepsilon=M-g(z)>0$ existe $r>0$ tal que si $\zeta\in B(z,r)$, entonces $|g(z) – g(\zeta)|<\varepsilon$. De donde: \begin{equation*} g(\zeta)-g(z) = |g(\zeta)|-|g(z)|\leq |g(z) – g(\zeta)|<\varepsilon, \end{equation*}por lo que: \begin{align*} g(\zeta) & = g(\zeta) – g(z) + g(z)\\ & < \varepsilon + g(z)\\ & = M – g(z) + g(z)\\ & = M, \end{align*}para cada $\zeta \in B(z,r)$. Por lo que $B(z,r) \subset V$ y como $z$ era arbitrario, entonces $V$ también es abierto.
Notemos que $U\neq \emptyset$, ya que por definición al menos el punto $z_0 \in D$ es un punto de $U$. Por lo tanto, dado que $D$ es conexo, se sigue que $V=\emptyset$, entonces $g(z) = M$ para todo $z\in D$, es decir la función $|f(z)|$ es constante en $D$, por lo que el resultado se sigue de la proposición 19.3.
$\blacksquare$
Observación 37.3. Se puede probar el principio del módulo máximo para funciones complejas continuas que satisfacen la propiedad del valor medio. Esta es una clase más general de funciones e incluye a las funciones analíticas. Se puede consultar una prueba de este hecho en Complex variables theory and applications, de H.S. Kasana.
Reformulando el teorema 37.4, podemos decir que el módulo de una función compleja, que es analítica y no constante en un dominio $D$, no alcanza su valor máximo en $D$. El principio del módulo máximo tiene numerosas formulaciones, las siguientes son ejemplos de ellas.
Observación 37.2. Si $D\subset\mathbb{C}$ es un dominio, denotamos a la frontera de $D$ como $\partial D$, entonces $\overline{D} = D \cup \partial D$ es un dominio cerrado y acotado en $\mathbb{C}$.
Corolario 37.6. Sea $D\subset\mathbb{C}$ un dominio acotado en el plano complejo y $f:\overline{D}\to\mathbb{C}$ una función continua en $\overline{D}$, que es analítica en $D$. Entonces $|f(z)|$ alcanza su valor máximo en algún punto de la frontera de $D$.
Demostración. Dadas las hipótesis, como $\overline{D}$ es cerrado y acotado, entonces es un conjunto compacto, proposición 10.7, y como la función $|f|$ es continua, entonces, proposición 10.10, alcanza su máximo en algún punto de $\overline{D}$. Si $|f|$ alcanza su máximo en algún punto de $\partial D = \overline{D}\setminus D$, entonces no hay nada que probar.
Supongamos que $|f|$ alcanza su máximo en algún punto de $D$, entonces, por el principio del módulo máximo, tenemos que $f$ es una función constante en $D$, por lo que, por la continuidad de $f$, se sigue que $f$ es constante en $\overline{D}$. En tal caso, $|f|$ alcanza su valor máximo, el cual es único, en cada punto de $\partial D$.
$\blacksquare$
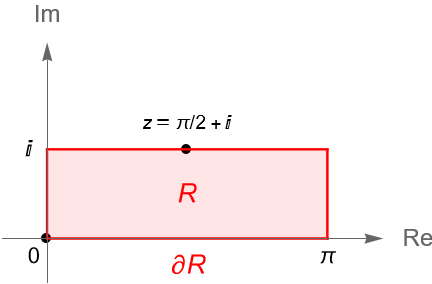
Ejemplo 37.4. Sea $R\subset\mathbb{C}$ el dominio rectangular: \begin{equation*} \{z=x+iy\in\mathbb{C} : 0\leq x \leq \pi, 0\leq y \leq 1\}, \end{equation*}y sea $f(z)=\operatorname{sen}(z)$. Determinemos el valor máximo de $|f|$ en $R$.
Solución. Sabemos que $f$ es una función entera, por lo que en particular es analítica en $\operatorname{int} R$ y continua en $R$, entonces por el principio del módulo máximo sabemos que $|f|$ alcanza su máximo en $\partial R$.
Por la observación 22.5, para $z=x+iy\in\mathbb{C}$ tenemos que: \begin{equation*} |f(z)|=|\operatorname{sen}(z)| = \sqrt{\operatorname{sen}^2(x)+\operatorname{senh}^2(y)}. \end{equation*}
Como $z=x+iy\in \partial R$, figura 137, entonces $\operatorname{sen}(x)$ alcanza su máximo en $\pi/2 \in [0,\pi]$, mientras que $\operatorname{senh}(y)$ alcanza su máximo en $1 \in [0,1]$, entonces el valor máximo de $|f|$ en el dominio $R$ se alcanza en $z=\pi/2+i$.
Figura 137: Dominio rectangular $R\subset\mathbb{C}$ del ejemplo 37.4.
Teorema 37.5. (Principio del módulo mínimo.) Sean $D\subset\mathbb{C}$ un dominio y $f:D\to\mathbb{C}$ una función analítica en $D$ tal que $f(z)\neq 0$ para todo $z\in D$. Si existe un punto $z_0 \in D$ tal que $|f(z_0)|\leq |f(z)|$ para todo $z\in D$, es decir, el módulo $|f(z)|$ alcanza su mínimo en $z_0$, entonces $f$ es una función constante en $D$.
Demostración. Dadas las hipótesis, como $f(z)\neq 0$ para todo $z\in D$, definimos a la función: \begin{equation*} g(z) = \frac{1}{f(z)}, \end{equation*} la cual es analítica en $D$. Como $|f|$ alcanza su mínimo en $z_0\in D$, entonces $|g|$ alcanza su máximo en $z_0$, por lo que, del principio del módulo máximo se sigue que $g$ es una función constante en $D$ y por tanto lo es $f$.
$\blacksquare$
Corolario 37.7. Sea $D\subset\mathbb{C}$ un dominio acotado en el plano complejo y $f:\overline{D}\to\mathbb{C}$ una función continua en $\overline{D}$, analítica en $D$ y que cumple que $f(z)\neq 0$ para todo $z\in D$. Entonces $|f(z)|$ alcanza su valor mínimo en algún punto de la frontera de $D$. Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 37.4. Sea $f(z)=z^2+2$. Determinemos el valor mínmo de $|f|$ en el disco cerrado $\overline{B}(0,1)$.
Solución. Sabemos quue $f$ es una función entera, por lo que en particular es continua en $\overline{B}(0,1)$ y analítica en $B(0,1)$. Notemos que $f(z)=0$ para $z=\pm \sqrt{2}i$, los cuales son puntos fuera de $\overline{B}(0,1)$, por lo que del principio del módulo mínimo $|f|$ alcanza su valor mínimo en $\partial \overline{B}(0,1)$.
Sea $z\in \partial \overline{B}(0,1)$. Si escribimos a $z$ en su forma polar, entonces: \begin{equation*} z=e^{i\theta}, \quad \theta\in[0,2\pi]. \end{equation*}
Determinamos los puntos críticos de $|f|$: \begin{equation*} \frac{d |f(z)|}{d \theta} = -\frac{8\operatorname{sen}(2\theta)}{2\sqrt{4\operatorname{cos}(2\theta) + 5}} = 0, \end{equation*}de donde $\theta = 0, \pi/2, \pi, 3\pi/2$ son los puntos críticos de $|f|$. Entonces, en $\theta= \pi/2$ y $\theta= 3\pi/2$ la función $|f(z)|$ alcanza el valor mínimo $1$, en el disco cerrado $\overline{B}(0,1)$.
Cerraremos esta entrada con un resultado que es una aplicación del principio del módulo máximo. Aunque este resultado no es no de lo más básicos en la teoría de la Variable Compleja, nos permite ver el tipo de restricciones que la analiticidad de una función compleja impone.
Teorema 37.6. (Lema de Schwarz.) Sea $f$ una función analítica en el disco unitario abierto $B(0,1)\subset\mathbb{C}$, tal que $|f(z)|\leq 1$ para $z\in B(0,1)$. Entonces $|f(z)|\leq |z|$ para todo $z\in B(0,1)$ y $|f'(0)|\leq 1$. Más aún, si $|f(z_0)|=|z_0|$ para algún $z_0\in B(0,1)$ tal que $z_0\neq 0$ ó $|f'(0)|=1$, entonces $f(z) = cz$ para todo $z\in B(0,1)$ y para alguna constante $c\in\mathbb{C}$ tal que $|c|= 1$.
Demostración. Dadas las hipótesis, definimos a la función $g:B(0,1)\to \mathbb{C}$ como: \begin{equation*} g(z) = \left\{ \begin{array}{lcc} \dfrac{f(z)}{z}, & \text{si} & z \neq 0, \\ \\ f'(0), & \text{si} & z = 0.\end{array} \right. \end{equation*}
Notemos que $g$ es una función continua en $B(0,1)$ ya que: \begin{equation*} \lim_{z \to 0} g(z) = \lim_{z \to 0} \frac{f(z)}{z} = f'(0). \end{equation*}
Por otra parte, $g$ es analítica en $B^*(0,1)=B(0,1)\setminus\{0\}$. Entonces, por el teorema de Morera generalizado, $g$ es analítica en $B(0,1)$.
Sea $0<r<1$, por lo que $\overline{B}(0,r)\subset B(0,1)$. Entonces $g$ es analítica en $\overline{B}(0,r)$ y para $z\in \partial B(0,1)$ se tiene que: \begin{equation*} \left|g(z)\right| = \left|\frac{f(z)}{z}\right| \leq \frac{1}{r}. \end{equation*}
Por el principio del módulo máximo tenemos que: \begin{equation*} \left|g(z)\right| \leq \frac{1}{r}, \quad \forall z\in \overline{B}(0,r). \end{equation*}
Notemos que si $z\in B(0,1)$ es fijo, al tomar el límite cuando $r\to 1$, se tiene que $|g(z)|\leq 1$, entonces $|f(z)|\leq |z|$ para todo $z\in B(0,1)$. Además $|f'(0)| = |g(0)| \leq 1$.
Por otra parte, si $|f(z_0)|=|z_0|$ para algún $z_0 \in B^*(0,1)$, entonces $|g(z_0)|=1$, es decir, el máximo del módulo de $g$ se alcanza en un punto interior del disco abierto $B(0,1)$, por lo que del principio del módulo máximo se tiene que $g$ es una función constante, es decir, $g(z) = c$, con $c\in\mathbb{C}$ tal que $|c|=1$. Del mismo modo, si $|f'(0)|=1$, entonces $|g(0)|=1$ y el máximo del módulo de $g$ se alcanza en $z=0$, por lo que del principio del módulo máximo se concluye que $g$ es constante.
$\blacksquare$
Tarea moral
Sea $R$ el dominio rectangular $\{z:\in\mathbb{C} : |\operatorname{Re}(z)|\leq 4, |\operatorname{Im}(z)|\leq 3\}$. Supón que $f$ es una función analítica en $R$ tal que $|f(z)|\leq 1$ para todo $z\in \partial R$, entonces muestra que: \begin{equation*} |f'(0)| \leq \frac{14}{9\pi}. \end{equation*}
Sea $f$ una función analítica en un dominio $D\subset\mathbb{C}$ y $z_0\in D$. Muestra que: \begin{equation*} f^{(n)}(z_0) = \frac{1}{2\pi r^{n+1}} \int_{0}^{2\pi} f(z_0+re^{it}) e^{-int} dt, \end{equation*}si $\overline{B}(z_0, r) \subset D$, con $r>0$.
Sea $D\subset\mathbb{C}$ un dominio con frontera $\partial D$. Sea $f(z)$ una función no constante definida en $\overline{D} = D \cup \partial D$, tal que $|f(z_0)|>m$ para algún $z_0\in D$ y $|f(z)|\leq m$ para todo $z\in \partial D$. Entonces, a) si $f$ es analítica en $D$, muestra que existe un punto en $\partial D$ donde $f$ no es continua; b) si $f$ es continua en $\partial D$, muestra que existe un punto en $D$ donde $f$ no es analítica.
Sean $D\subset\mathbb{C}$ un dominio acotado con frontera $\partial D$ y $f(z)=u(x,y)+iv(x,y)$ una función analítica en $D$ y continua en $\partial D$. Muestra que las siguientes funciones alcanzan su máximo en la frontera del dominio $D$. a) $(x^2+y^2)e^{u(x,y)}$. b) $(u^2(x,y) + v^2(x,y))e^{u(x,y)}$. c) $(\operatorname{sen}^2(x) + \operatorname{senh}^2(y))e^{u(x,y)}$. d) $(\operatorname{cos}^2(x) + \operatorname{senh}^2(y))e^{u(x,y)}$. Hint: En cada caso, define a la función $g(z)$ cuya parte real corresponde con la función dada y aplica el principio del módulo máximo.
Sea $f$ una función entera tal que $|f(z)|\leq c |z|^\lambda +d$ para todo $z\in \mathbb{C}$, con $\lambda, c$ y $d$ constantes positivas. Prueba que $f$ es necesariamente un polinomio complejo cuyo grado no es mayor que $\lambda$. Hint: Modifica la prueba del teorema de Liouville.
Prueba la siguiente generalización del lema de Schwarz. Si $f$ es una función analítica en el disco $B(z_0,r)$ y $m$ es una constante tal que $|f(z)-f(z_0)|\leq m$ para todo $z\in B(z_0,r)$, entonces $|f'(z_0)| \leq m/r$ y $|f(z)-f(z_0)|\leq (m/r)|z-z_0|$ se cumple para todo $z\in B(z_0,r)$.
Sea $f$ una función entera tal que $f(0)=0$ y $\lim\limits_{|z|\to \infty} \operatorname{Re}f(z) = 0$. Prueba que $f(z)=0$ para todo $z\in\mathbb{C}$.
Más adelante…
En esta entrada hemos abordado algunas de las consecuencias más importantes del teorema integral de Cauchy.
En la siguiente entrada veremos la versión homótopica del teorema de Cauchy y con ella generalizaremos el resultado para ciertos dominios del plano complejo $\mathbb{C}$, llamados dominios simplemente conexos, lo cual nos permitirá extender nuestra versión local, para discos, de dicho resultado.
El teorema integral de Cauchy es una de las piedras angulares del análisis complejo. Dicho resultado resuelve dos características aparentemente contradictorias de las integrales de contorno cuando $f$ es una función fija pero el contorno $\gamma$, a lo largo del que se integrará a $f$, puede cambiar. Por una parte, es posible modificar el contorno $\gamma$ de forma bastante drástica sin efecto en la integral, por ejemplo, reemplazando un contorno simple por un contorno no simple a trozos. Por otra parte, si cambiamos un contorno semicircular en el semiplano superior del plano complejo $\mathbb{C}$, que une a $-1$ y $1$, por un contorno semicircular en el semiplano inferior de $\mathbb{C}$, que une a $-1$ y $1$, tenemos que el resultado de la integral de $f(z)=z^{-1}$ a lo largo de dichos contornos cambia completamente. Entonces, a través del teorema integral de Cauchy nos será posible explicar estas dos características y concluir que lo que realmente importa es el número de vueltas que un contorno $\gamma$ da alrededor de los puntos que se encuentran fuera del dominio de $f$.
El teorema integral de Cauchy-Goursat establece que dentro de ciertos dominios la integral de una función analítica a lo largo de un contorno cerrado simple es cero. Una extensión de este teorema nos permitirá reemplazar integrales sobre ciertos contornos complicados con integrales sobre contornos que son fáciles de evaluar.
En esta entrada abordaremos una versión local del teorema integral de Cauchy para discos abiertos, la cual nos permitirá obtener un resultado general de dicho teorema.
Recordemos el siguiente resultado visto en nuestros cursos de Cálculo.
Teorema 36.1. (Teorema de Green.) Sea $C$ una curva de clase $C^1$, cerrada, simple y orientada positivamente, tal que es la frontera de una región $D\subset\mathbb{R}^2$. Si $P, Q: D\to \mathbb{R}$ son dos funciones reales de clase $C^{1}$, entonces: \begin{equation*} \int_{C} P dx + Q dy = \iint_{D} \left(\frac{\partial Q}{\partial x} – \frac{\partial P}{\partial y}\right) dx dy. \end{equation*}
Procedemos a enunciar una primera versión del teorema integral de Cauchy para rectángulos.
Teorema 36.2. (Primera versión del Teorema Integral de Cauchy.) Sean $U\subset\mathbb{C}$ un conjunto abierto, $f:U\to\mathbb{C}$ una función de clase $C^1$ y $R\subset U$ un rectángulo cerrado con frontera $\partial R$ orientada positivamente. Entonces: \begin{equation*} \int_{\partial R} f(z) dz = 0. \end{equation*}
Demostración. Dadas las hipótesis, sea $f(z)=u(x,y)+iv(x,y)$.
De la definición 17.2 se tiene que $f$ es de clase $C^1$ si y solo si $u, u: U \to \mathbb{R}$ son dos funciones reales de clase $C^1$. Más aún, por el teorema 17.1 se cumple que las funciones $u$ y $v$ satisfacen las ecuaciones de C-R, por ser $f$ una función analítica en $U$. Entonces, para $dz = dx+idy$, por la observación 34.3 y el Teorema de Green, se tiene que: \begin{align*} \int_{\partial R} f(z) dz & = \int_{\partial R} (udx-vdy) + i \int_{\partial R} (vdx+udy)\\ & = \iint_{R} \left(-\frac{\partial v}{\partial x} – \frac{\partial u}{\partial y}\right) dx dy + i\iint_{R} \left(\frac{\partial u}{\partial x} – \frac{\partial v}{\partial y}\right) dx dy\\ & = \iint_{R} \left(\frac{\partial u}{\partial y} – \frac{\partial u}{\partial y}\right) dx dy + i \iint_{R} \left(\frac{\partial u}{\partial x} – \frac{\partial u}{\partial x}\right) dx dy\\ & = 0. \end{align*}
$\blacksquare$
Bajo la hipótesis adicional de que $f'(z)$ es continua para todo $z\in U$, la demostración de esta primera versión del Teorema de Cauchy es clara. Aunque el Teorema de Green fue establecido hasta 1828, fue Augustin Cauchy quien en 1814 demostró por primera vez el teorema 36.1, bajo la hipótesis adicional de continuidad sobre $f’$, utilizando una formulación equivalente a la establecida en el Teorema de Green.
Observación 36.1. Más adelante probaremos que las derivadas de una función analítica son también funciones analíticas y por tanto continuas, proposición 16.1, entonces la hipótesis de continuidad sobre $f’$ resulta redundante e innecesaria.
Procedemos ahora a probar una versión local del Teorema integral de Cauchy para discos.
Teorema 36.3. (Teorema Integral de Cauchy-Goursat para discos.) Sean $r>0$, $z_0\in \mathbb{C}$ un punto fijo y $f:B(z_0, r) \to \mathbb{C}$ una función analítica en el disco abierto $B(z_0, r)$. Entonces: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*}para cualquier contorno cerrado $\gamma$ en $B(z_0, r)$.
Demostración. Dadas las hipótesis, sea $z_0=x_0+iy_0$ el centro del disco $B(z_0,r)$, $\zeta=x+iy\in B(z_0,r)$ cualquier punto y $f(z)=u(x,y)+iv(x,y)$. De acuerdo con la proposición 35.2 basta con probar que existe una primitiva de $f$ en $B(z_0,r)$.
Sea $\gamma_1$ el contorno dado por el segmento de recta vertical que une a $z_0$ con $x_0+iy$ seguido del segmento de recta horizontal que une a $x_0+iy$ con $\zeta$, es decir, $\gamma_1 := [z_0, x_0+iy]+[x_0+iy, \zeta]$. Análogamente, definimos al contorno $\gamma_2$ dado por el segmento de recta horizontal que une a $z_0$ con $x+iy_0$ seguido del segmento de recta vertical que une a $x+iy_0$ con $\zeta$, es decir, $\gamma_2 := [z_0, x+iy_0]+[x+iy_0, \zeta]$, figura 134.
Es claro que el contorno $\gamma = \gamma_2 + (-\gamma)$ es un contorno cerrado y coincide con la frontera $\partial R$ del rectángulo $R\subset B(z_0,r)$ con vértices $z_0, x+iy_0, \zeta, x_0+iy \in B(z_0,r)$. Por lo que, del lema de Goursat y la proposición 34.2, tenemos que: \begin{align*} 0 & = \int_{\partial R} f(z) dz\\ & = \int_{z_0}^{x+iy_0} f(z) dz + \int_{x+iy_0}^{\zeta} f(z) dz + \int_{\zeta}^{x_0+iy} f(z) dz + \int_{x_0+iy}^{z_0} f(z) dz\\ & = \int_{\gamma_2} f(z) dz + \int_{-\gamma_1} f(z) dz. \end{align*}
Figura 134: Rectángulo cerrado $R\subset B(z_0, r)$.
Considerando lo anterior definimos a la función: \begin{equation*} F(z) := \int_{\gamma_1} f(z) dz = \int_{\gamma_2} f(z) dz. \end{equation*}
Veamos que $F$ es una primitiva de $f$ en $B(z_0, r)$.
Como en los segmentos $[z_0, x+iy_0]$ y $[x_0+iy, \zeta]$ el término imaginario es constante, entonces podemos parametrizar a dichos segmentos, respectivamente, como: \begin{align*} \beta_1(t) & = t+iy_0, \quad \forall \, t\in [x_0, x],\\ \beta_2(t) & = t+iy, \quad \forall \, t\in [x_0, x]. \end{align*}
Análogamente, en los segmentos $[z_0, x_0+iy]$ y $[x+iy_0, \zeta]$ el término real es constante, por lo que podemos parametrizar a dichos segmentos, respectivamente, como: \begin{align*} \beta_3(t) & = x_0+it, \quad \forall \, t\in [y_0, y],\\ \beta_4(t) & = x+it, \quad \forall \, t\in [y_0, y]. \end{align*}
Entonces, de la definición 34.1 y la proposición 33.1, se sigue que: \begin{align*} F(z) & = \int_{\gamma_1} f(z) dz\\ & = \int_{\beta_1} f(z) dz + \int_{\beta_4} f(z) dz\\ & = \int_{x_0}^{x} f(t+iy_0) dt + i\int_{y_0}^{y} f(x+it) dt\\ & = \int_{x_0}^{x} u(t+iy_0) dt + i \int_{x_0}^{x} v(t+iy_0) dt – \int_{y_0}^{y} v(x,t) dt + i\int_{y_0}^{y} u(x,t) dt. \end{align*}
Por el primer Teorema Fundamental del Cálculo tenemos que: \begin{align*} \frac{\partial F(z)}{\partial y} & = \frac{\partial}{\partial y} \int_{x_0}^{x} u(t+iy_0) dt + i \frac{\partial}{\partial y} \int_{x_0}^{x} v(t+iy_0) dt\\ & \quad \,\, – \frac{\partial}{\partial y} \int_{y_0}^{y} v(x,t) dt + i \frac{\partial}{\partial y} \int_{x_0}^{x} u(x,t) dt\\ & = 0 + i 0 – v(x,y) + i u(x,y)\\ & = i\left[u(x,y) + i v(x,y)\right]\\ & = i f(z). \end{align*}
Tenemos que: \begin{equation*} 0 = f(z) – f(z) = \frac{\partial F(z)}{\partial x} + i \frac{\partial F(z)}{\partial y}, \end{equation*}es decir, si $F(z)=U(x,y) + i V(x,y)$, entonces: \begin{equation*} \frac{\partial U}{\partial x} = \frac{\partial V}{\partial y}, \quad \frac{\partial U}{\partial y} = – \frac{\partial V}{\partial x}, \end{equation*}por lo que $U$ y $V$ satisfacen las ecuaciones de C-R. Más aún, como $f$ es analítica en $B(z_0, r)$, en particular es continua, por lo que $U_x, U_y, V_x$ y $V_y$ son continuas, es decir, $F$ es una función de clase $C^1(B(z_0, r))$, entonces por el teorema 18.1 tenemos que $F$ es una función analítica en $B(z_0, r)$ tal que: \begin{equation*} F'(z) = \frac{\partial F(z)}{\partial x} = – i \frac{\partial F(z)}{\partial y} = f(z), \quad \forall z\in B(z_0, r), \end{equation*}es decir, $F$ es una primitiva de $f$ en $B(z_0, r)$, por lo que de la proposición 35.2 se sigue que: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*}para cualquier contorno cerrado $\gamma$ en $B(z_0, r)$.
$\blacksquare$
Ejemplo 36.1. Evaluemos la integral: \begin{equation*} \int_{\gamma} \frac{e^z}{z^2-16} dz, \end{equation*}donde $\gamma$ describe a la circunferencia $C(0,2)$ orientada positivamente y recorrida una vez.
Solución. Es claro que la función: \begin{equation*} f(z) = \frac{e^z}{z^2-16}, \end{equation*}es analítica en $D = \mathbb{C}\setminus\{-4, 4\}$ y en particular es analítica en el disco abierto $B(0,3) \subset D$.
Por otra parte, tenemos que el contorno cerrado $C(0,2)$, parametrizado por $\gamma(t)=2e^{it}$, con $t\in[0,2\pi]$, está completamente contenido en el disco $B(0,3)$, figura fig:f135, por lo que del teorema 36.3 se sigue que: \begin{equation*} \int_{\gamma} \frac{e^z}{z^2-16} dz =0. \end{equation*}
Figura 135: Contorno cerrado $C(0,2)$ completamente contenido en el disco $B(0,3)$.
Solución. Es claro que ambas integrales son integrales reales impropias, por lo que debemos probar que: \begin{equation*} \lim_{r\to \infty}\int_{0}^{r} \operatorname{cos}(t^2) dt = \lim_{r\to \infty} \int_{0}^{r} \operatorname{sen}(t^2) dt = \frac{\sqrt{2\pi}}{4}. \end{equation*}
Dado que $e^{it^2} = \operatorname{cos}(t^2) + \operatorname{sen}(t^2)$, basta probar que: \begin{equation*} \lim_{r\to \infty}\int_{0}^{r} e^{t^2} dt = \frac{(1+i)\sqrt{2\pi}}{4}, \end{equation*}y tomar la parte real e imaginaria para obtener el resultado.
Figura 136: Contorno $\gamma=\gamma_1+\gamma_2-\gamma_3$ del ejemplo 36.2.
Tenemos que $f$ es una función entera, por lo que es analítica en cualquier disco abierto, en particular si consideramos al disco abierto $B(0,R)$, con $0<r<R$, entonces es claro que el contorno $\gamma$ está completamente contenido en $B(0,R)$, por lo que del Teorema Integral de Cauchy-Goursat, para discos y de la proposición 34.2, se sigue que: \begin{equation*} 0 = \int_{\gamma} e^{iz^2} dz = \int_{\gamma_1} e^{iz^2} dz + \int_{\gamma_2} e^{iz^2} dz – \int_{\gamma_3} e^{iz^2} dz, \end{equation*}por lo que: \begin{align*} \int_{0}^{r} e^{it^2} dt & = \int_{\gamma_1} e^{iz^2} dz\\ & = \int_{\gamma_3} e^{iz^2} dz – \int_{\gamma_2} e^{iz^2} dz\\ & = \frac{(1+i)\sqrt{2}}{2} \int_{0}^{r} e^{-t^2} dt – \int_{\gamma_2} e^{iz^2} dz. \tag{36.1} \end{align*}
Por el ejemplo 34.11 sabemos que: \begin{equation*} \left|\int_{\gamma_2} e^{iz^2} dz\right| \leq \frac{\pi(1-e^{r^2})}{4r}, \end{equation*}por lo que, tomando el límite cuando $r \to \infty$ tenemos que: \begin{equation*} \left|\int_{\gamma_2} e^{iz^2} dz\right| = 0, \quad \Longrightarrow \int_{\gamma_2} e^{iz^2} dz = 0. \end{equation*}
Entonces, tomando el límite cuando $r \to \infty$ en (36.1) tenemos que: \begin{equation*} \lim_{r \to \infty} \int_{0}^{r} e^{it^2} dt = \frac{(1+i)\sqrt{2}}{2} \lim_{r \to \infty} \int_{0}^{r} e^{-t^2} dt. \end{equation*}
Por último, tomando la parte real e imaginaria de esta última igualdad tenemos el resultado.
Teorema 36.4. (Teorema Integral de Cauchy-Goursat generalizado para discos.) Sean $r>0$, $z_0\in \mathbb{C}$ un punto fijo, $z_1, z_2, \ldots, z_n \in B(z_0, r)$, $D:= B(z_0, r) \setminus \{z_1, z_2, \ldots, z_n \}$ y $f:D \to \mathbb{C}$ una función analítica en $D$ tal que: \begin{equation*} \lim_{z\to z_j} (z-z_j)f(z)=0, \end{equation*}para todo $j=1,\ldots, n$. Entonces: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*}para cualquier contorno cerrado $\gamma$ en $D$ que no pasa por los puntos $z_1, z_2, \ldots, z_n$.
Demostración. Dadas las hipótesis, es suficiente con probar el caso para un único punto $z_1\in B(z_0,r)$ en el cual $f$ no es analítica y proceder por inducción.
De manera similar a la prueba anterior, basta mostrar que existe una primitiva de $f$ en $D = B(z_0,r)\setminus\{z_1\}$. Para ello tomamos a $\zeta \in D$ y consideramos al contorno poligonal$\gamma$ que une al centro $z_0$ del disco abierto $B(z_0,r)$ con $\zeta$, considerando segmentos de recta verticales y horizontales, sin pasar por $z_1$ y definimos a dicha primitiva como la función: \begin{equation*} F(z)=\int_{\gamma} f(z) dz, \end{equation*}la cual está bien definida pues $B(z_0,r)$ es poligonal conexo, entonces el contorno poligonal $\gamma$ siempre existe. Solo basta considerar la ubicación del punto $z_1\in B(z_0,r)$ al definir a $\gamma$. Si $z_1$ no cae en las rectas $x=x_0$ y $y_0$, entonces bastan tres segmentos de recta para unir a $z_0=x_0+iy_0$ con el punto $\zeta \neq z_1$, en tal caso es fácil mostrar, de la misma manera que antes, que $F_y(z)=if(z)$ y $F_x(z)=f(z)$ utilizando el lema de Goursat generalizado y concluir que $F$ es una primitiva de $f$ en $D$, por lo que el resultado se sigue de la proposición 35.2.
Por último, si $z_1$ cae en alguna de las rectas $x=x_0$ ó $y=y_0$, basta con fijar otro punto de inicio de $\gamma$, distinto del centro del disco $B(z_0,r)$, en la definición de $F$ y volver a plantear el análisis anterior.
$\blacksquare$
Observación 36.2. Notemos que el resultado anterior es equivalente a pedir que $f$ sea analítica en $B(z_0, r) \setminus \{z_1, z_2, \ldots, z_n \}$, con $z_1, z_2, \ldots, z_n \in B(z_0, r)$, y continua en $B(z_0, r)$.
Corolario 36.1. Sean $r>0$, $z_0\in \mathbb{C}$ un punto fijo, $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $f:B(z_0, r) \to \mathbb{C}$ una función analítica en el disco abierto $B(z_0, r)$, $\zeta \in B(z_0,r)$ y $\gamma:[a,b]\to B(z_0,r)$ un contorno cerrado que no pasa por $\zeta$. Entonces: \begin{equation*} f(\zeta) \int_{\gamma} \frac{dz}{z-\zeta} = \int_{\gamma} \frac{f(z)}{z-\zeta} dz. \end{equation*}
Demostración.Dadas las hipótesis, sea $\zeta\in B(z_0,r)$, como $f$ es analítica en el disco abierto $B(z_0,r)$, en particular lo es en $\zeta$, por lo que: \begin{equation*} \lim_{z\to \zeta} \dfrac{f(z)-f(\zeta)}{z-\zeta} = f'(\zeta). \end{equation*}
Considerando lo anterior definimos a la función: \begin{equation*} g(z)= \left\{ \begin{array}{lcc} \dfrac{f(z)-f(\zeta)}{z-\zeta} & \text{si} & z \neq \zeta, \\ \\ f'(\zeta) & \text{si} & z = \zeta. \end{array} \right. \end{equation*}
Claramente $g$ es una función analítica en $B(z_0,r)\setminus\{\zeta\}$ y continua en $\zeta$, por lo que: \begin{equation*} \lim_{z\to \zeta} (z-\zeta) g(z) = 0. \end{equation*}
Por lo que: \begin{equation*} f(\zeta) \int_{\gamma} \frac{dz}{z-\zeta} = \int_{\gamma} \frac{f(z)}{z-\zeta} dz, \end{equation*} para cualquier contorno cerrado $\gamma$ en $B(z_0,r)$ que no pasa por $\zeta$.
$\blacksquare$
Lema 36.1. Sean $[a,b]\subset\mathbb{R}$, con $a<b$, $\gamma:[a,b]\to\mathbb{C}$ un contorno y $\varphi:\mathbb{C} \to \mathbb{C}$ una función que está definida y es continua en los puntos del contorno, es decir, en $\gamma([a,b])$. Para cada $n\in\mathbb{N}^+$ se define a la función: \begin{equation*} F_n(z) : = \int_{\gamma} \frac{\varphi(\zeta)}{(\zeta – z)^n} d\zeta, \quad z\not\in \gamma([a,b]). \end{equation*}
Entonces, cada función $F_n$ es analítica en $\mathbb{C}\setminus\gamma([a,b])$ y $F_n'(z) = n F_{n+1}(z)$, lo cual implica que cada $F_n$ tiene derivadas analíticas de todos los órdenes.
Demostración. Dadas las hipótesis, primero procedemos a verificar que cada función $F_n$ es continua. Sea $z_0 \in D:=\mathbb{C}\setminus\gamma([a,b])$ fijo. Como $[a,b]\subset\mathbb{R}$ es compacto y la función $\gamma$ es continua, entonces, proposición 10.9, $\gamma([a,b])$ es compacto, por lo que, proposición 10.10, $\gamma$ alcanza su valor mínimo, entonces definimos a $r:=\min\limits_{t\in[a,b]}| \gamma(t) – z_0|>0$. Análogamente, como $\gamma([a,b])$ es compacto y $\varphi$ es continua en dicho conjunto, entonces su imagen también es un conjunto compacto, en particular es un conjunto acotado, es decir, existe $M>0$ tal que $|\varphi(\zeta)| \leq M$ para todo $\zeta \in \gamma([a,b])$.
Multiplicando por $\varphi(\zeta)$ e integrando a lo largo de $\gamma$, en ambos lados de la igualdad anterior, tenemos que: \begin{align*} F_n(z)-F_n(z_0) & = (z-z_0) \int_{\gamma} \left[\frac{\varphi(\zeta)}{(\zeta – z)^{n}(\zeta – z_0)} + \cdots + \frac{\varphi(\zeta)}{(\zeta-z)(\zeta – z_0)^{n}} \right] d \zeta\\ & = (z-z_0) \int_{\gamma} \sum_{k=0}^{n-1} \frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta\\ & = (z-z_0) \sum_{k=0}^{n-1} \int_{\gamma}\frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta,\tag{36.3} \end{align*}donde $z\in B(z_0, r/2)$ y $\zeta \in \gamma([a,b])$. Por lo que $|z-z_0| < r/2$, $r/2 < r \leq |\zeta – z_0|$ y $r/2<|\zeta – z|$, entonces: \begin{equation*} \left| \frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} \right| < M \left(\frac{2}{r}\right)^{n+1}, \end{equation*}para cada $0\leq k \leq n-1$.
Por lo tanto, para $\varepsilon>0$, tomando $\delta < r/2$ se tiene que si $|z-z_0|<\delta$, entonces podemos acotar a (36.3) mediante la proposición 34.3(5) y la desigualdad del triángulo, es decir: \begin{align*} | F_n(z)-F_n(z_0)| & = |z-z_0| \left|\sum_{k=0}^{n-1} \int_{\gamma}\frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta\right|\\ & \leq |z-z_0| \sum_{k=0}^{n-1} \left| \int_{\gamma}\frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta\right|\\ & \leq |z-z_0| \sum_{k=0}^{n-1} \int_{\gamma}\left| \frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta\right|\\ & < \delta \sum_{k=0}^{n-1} M \left(\frac{2}{r}\right)^{n+1} \int_{\gamma} |dz|\\ & = n \delta M \ell(\gamma) \left(\frac{2}{r}\right)^{n+1}. \end{align*}
Por lo que, para: \begin{equation*} \delta := \min \left\{\frac{r}{2}, \frac{\varepsilon r^{n+1}}{ n M \ell(\gamma) 2^{n+1}}\right\}, \end{equation*}se tiene que si $|z-z_0|\delta$, entonces $|F_n(z)-F_n(z_0)| < \varepsilon$, por lo que $F_n$ es una función continua.
Dividiendo en ambos lados de la igualdad (36.3) por $z-z_0$, tenemos que: \begin{align*} \frac{F_n(z)-F_n(z_0)}{z-z_0} & =\sum_{k=0}^{n-1} \int_{\gamma}\frac{\varphi(\zeta)}{(\zeta – z)^{n-k}(\zeta – z_0)^{k+1}} d \zeta\\ & =\sum_{k=0}^{n-1} \int_{\gamma}\frac{\varphi(\zeta)(\zeta – z_0)^{-(k+1)}}{(\zeta – z)^{n-k}} d \zeta. \end{align*}
Dado que $z_0\not\in\gamma([a,b])$, entonces para cada $0\leq k \leq n-1$, la función: \begin{equation*} \varphi(\zeta)(\zeta – z_0)^{-(k+1)}, \end{equation*}es continua. Por lo tanto, de la primera parte de la prueba tenemos que la función: \begin{equation*} h(z) = \int_{\gamma}\frac{\varphi(\zeta)(\zeta – z_0)^{-(k+1)}}{(\zeta – z)^{n-k}} d \zeta, \end{equation*}es una función continua para cada $0\leq k \leq n-1$. Entonces: \begin{align*} F_n'(z_0) & = \lim_{z\to z_0} \frac{F_n(z)-F_n(z_0)}{z-z_0}\\ & = \lim_{z\to z_0} \sum_{k=0}^{n-1} \int_{\gamma}\frac{\varphi(\zeta)(\zeta – z_0)^{-(k+1)}}{(\zeta – z)^{n-k}} d \zeta\\ & = \sum_{k=0}^{n-1} \int_{\gamma} \lim_{z\to z_0} \frac{\varphi(\zeta)(\zeta – z_0)^{-(k+1)}}{(\zeta – z)^{n-k}} d \zeta\\ & = \sum_{k=0}^{n-1} \int_{\gamma} \frac{\varphi(\zeta)}{(\zeta – z_0)^{n+1}} d \zeta\\ & = \sum_{k=0}^{n-1} \int_{\gamma} \frac{\varphi(\zeta)}{(\zeta – z_0)^{n+1}} d \zeta\\ & = n\int_{\gamma} \frac{\varphi(\zeta)}{(\zeta – z_0)^{n+1}} d \zeta\\ & = n F_{n+1}(z_0). \end{align*}
$\blacksquare$
Definición 36.1. (Índice de un contorno cerrado respecto a un punto.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $\gamma:[a,b]\to\mathbb{C}$ un contorno cerrado y $z_0\in\mathbb{C}\setminus\gamma([a,b])$, es decir, $z_0\in\mathbb{C}$ es un punto que no está en el contorno $\gamma$. Se define al índice de $\gamma$ con respecto de $z_0$ como: \begin{equation*} n(\gamma, z_0) = \frac{1}{2\pi i} \int_{\gamma} \frac{dz}{z-z_0}. \end{equation*}
Proposición 36.1. Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $\gamma:[a,b]\to\mathbb{C}$ un contorno cerrado y $z_0\in\mathbb{C}\setminus\gamma([a,b])$. Entonces: \begin{equation*} \int_{\gamma} \frac{1}{z-z_0} dz = 2\pi k i,\tag{36.3} \end{equation*}para algún $k\in\mathbb{Z}$. Es decir, la integral (36.3) es un múltiplo entero de $2\pi i$.
Demostración. Dadas las hipótesis, por la definición 34.1 tenemos que: \begin{equation*} h(z):=\int_{\gamma} \frac{1}{z-z_0} dz = \int_{a}^{b} \frac{\gamma'(t)}{\gamma(t)-z_0} dt. \end{equation*}
Considerando lo anterior definimos a la función híbrida $F:[a,b]\to\mathbb{C}$ como: \begin{equation*} F(x):= \int_{a}^{x} \frac{\gamma'(t)}{\gamma(t)-z_0} dt, \quad a\leq x \leq b. \end{equation*}
Por construcción es claro que $F$ es una función continua en $[a,b]$ y que $F(a) =0$ y $F(b)=h(z)$. Veamos que $F(b)=2\pi k i$, para algún $k\in\mathbb{Z}$.
Dado que $\gamma’$ es continua en $[a,b]$, salvo quizás en un número finito de puntos, entonces $F$ es diferenciable en los puntos de continuidad de $\gamma’$ y su derivada está dada por el Teorema Fundamental del Cálculo: \begin{equation*} F'(x) = \frac{\gamma'(x)}{\gamma(x)-z_0}, \tag{36.4} \end{equation*}para los puntos donde $\gamma’$ existe.
Sea $G:[a,b] \to\mathbb{C}$ la función híbrida dada por: \begin{equation*} G(t) = e^{-F(t)}\left[\gamma(t)-z_0\right], \quad a\leq t \leq b. \end{equation*}
Por construcción tenemos que $G$ es también continua en $[a,b]$. Más aún, para cada $t\in [a,b]$ donde $\gamma’$ es continua, por (36.4) y como $\gamma(a) = \gamma(b) \neq z_0$, tenemos que: \begin{align*} G'(t) &= e^{-F(t)} \gamma'(t) – F'(t) e^{-F(t)}\left[\gamma(t)-z_0\right]\\ &= e^{-F(t)}\left( \gamma'(t) – F'(t)\left[\gamma(t)-z_0\right]\right)\\ &= e^{-F(t)}\left( \gamma'(t) – \frac{\gamma'(t)}{\gamma(t)-z_0}\left[\gamma(t)-z_0\right]\right)\\ &= e^{-F(t)}\left[\gamma'(t) – \gamma'(t)\right]\\ & = 0. \end{align*}
Lo anterior nos dice que $G$ es una función constante en cada subintervalo donde $\gamma’$ existe y como $G$ es continua entonces $G$ es una función constante en $[a,b]$, por lo que $G(a) = G(b)$, es decir: \begin{equation*} e^{-F(a)}\left[\gamma(a)-z_0\right] = e^{-F(b)}\left[\gamma(b)-z_0\right]. \end{equation*}
Dado que $F(a) =0$ y $\gamma(a) = \gamma(b) \neq z_0$, tenemos que: \begin{equation*} e^{-F(b)} = 1, \end{equation*}lo cual implica, por la proposición 20.2(10), que para algún $k\in\mathbb{Z}$: \begin{equation*} F(b)=2\pi k i. \end{equation*}
Entonces: \begin{equation*} 2\pi k i = F(b) = h(z) =\int_{\gamma} \frac{1}{z-z_0} dz, \end{equation*}para algún $k\in\mathbb{Z}$.
$\blacksquare$
Corolario 36.2. El índice de un contorno cerrado $\gamma$ respecto a un punto $z_0$ es un número entero.
Demostración. Es inmediato de la definición de $n(\gamma,z_0)$ y la proposición 36.1.
$\blacksquare$
Observación 36.3. Claramente $f(z) = \dfrac{1}{z-z_0}$ es una función analítica en $D:=\mathbb{C}\setminus\{z_0\}$. Si pudiéramos encontrar una función analítica $F:D\to\mathbb{C}$ tal que $F'(z) = f(z)$ para todo $z\in D$, entonces tendríamos que $n(\gamma, z_0) = 0$ para toda curva cerrada $\gamma$ en $D$, que no pase por $z_0$. Sin embargo, de acuerdo con el ejemplo 34.1 y la proposición 35.3 sabemos que $f$ no tiene primitiva en $D$, por lo que $n(\gamma, z_0) \neq 0$ para toda curva cerrada $\gamma$ en $D$, que no pase por $z_0$.
Para continuar, en este punto es importante introducir el siguiente resultado, el cual intuitivamente es claro, pero cuya demostración es bastante complicada y se escapa de los objetivos de estas notas, por lo que en el curso lo tomaremos como válido, aunque puede consultarse una prueba formal de este hecho en:
Complex Analysis: The Argument Principle in Analysis and Topology, de Alan F. Beardon.
An Introduction to Classical Complex Analysis, de Robert B. Burckel.
Teorema 36.5. (Teorema de la curva de Jordan.) Los puntos en cualquier contorno cerrado simple $C\subset\mathbb{C}$ son la frontera de dos dominios distintos, uno de los cuales es el interior de $C$, denotado por $I$, y está acotado. El otro, es el exterior de $C$, denotado por $E$, y no es acotado. En tal caso, $I \cup E \cup C$ es igual al plano complejo $\mathbb{C}$.
Ejemplo 36.3. Sean $r>0$ y $z_0\in\mathbb{C}$ un punto fijo. Consideremos a los conjuntos disjuntos $S_1 = \{z\in\mathbb{C} : |z-z_0|<r\}$ y $S_2 = \{z\in\mathbb{C} : |z-z_0|>r\}$, los cuales son abiertos en $\mathbb{C}$. Geométricamente es claro que la circunferencia $C(z_0,r)=\{z\in\mathbb{C} : |z-z_0|=r\}$ es un contorno cerrado simple y los puntos en $C(z_0,r)$ son la frontera de $S_1$ y $S_2$. El interior de $C(z_0,r)$ es $S_1$, el cual es un conjunto acotado y el exterior de $C(z_0,r)$ es $S_2$, el cual es un conjunto no acotado.
Observación 36.4. Por la proposición 10.9 sabemos que al ser $[a,b]\subset\mathbb{R}$, con $a<b$, un conjunto compacto y $\gamma:[a,b]\to\mathbb{C}$ una trayectoria, es decir, $\gamma$ es una función continua en $[a,b]$, entonces la curva $\gamma([a,b])$ en el plano complejo, es un conjunto compacto, es decir, una curva en $\mathbb{C}$ es un conjunto cerrado y acotado. Entonces el conjunto $U = \mathbb{C}\setminus\gamma([a,b])$ es un conjunto abierto no vacío, por lo que, ejercicio 9 de la entrada 10, podemos ver a $U$ como la unión disjunta numerable de dominios, correspondientes con las componentes conexas de $U$.
El siguiente lema enuncia algunas de las propiedades clave del índice de un contorno.
Lema 36.2. Sean $\gamma$ un contorno cerrado en el plano complejo y $U=\mathbb{C}\setminus\gamma([a,b])$. Se cumplen las siguientes propiedades.
$n(\gamma, z)$ permanece constante conforme $z$ toma valores en cualquiera de las componentes conexas de $U$.
$n(\gamma, z) = 0$ para cualquier $z$ en la componente no acotada de $U$.
Si $\gamma$ es simple, entonces $n(\gamma, z)=1$ ó $n(\gamma, z)=-1$, para todo $z$ en la componente acotada de $U$.
Demostración. Dadas las hipótesis, únicamente probaremos las primeras dos propiedades. La última afirmación está sustentada en el teorema de la curva de Jordan y por lo extenso de su prueba la omitiremos, pero se puede consultar una prueba detallada en An Introduction to Complex Function Theory, de Bruce P. Palka.
Sea $\varphi : \gamma([a,b]) \to \mathbb{C}$ dada por: \begin{equation*} \varphi(\zeta) = \frac{1}{2\pi i}. \end{equation*}Por lo que, del lema 36.1 para $n=1$ y la definición 36.1, tenemos que: \begin{equation*} n(\gamma,z)=\int_{\gamma} \frac{1}{\zeta-z} d\zeta, \end{equation*}es una función analítica, de $z$, en $U$, cuya derivada está dada por: \begin{equation*} n'(\gamma,z)=\int_{\gamma} \frac{1}{(\zeta-z)^2} d\zeta. \end{equation*}Por otra parte, si fijamos a $z\in\mathbb{C}$, entonces la función: \begin{equation*} f(\zeta) = \frac{1}{(\zeta-z)^2}, \end{equation*}es una función analítica, de $\zeta$, en $\mathbb{C}\setminus\{z\}$ y tiene como primitiva, en dicho conjunto, a la función: \begin{equation*} F(\zeta) = -\frac{1}{\zeta-z}. \end{equation*}Si $z\in U$, entonces $\gamma$ es un contorno cerrado en $\mathbb{C}\setminus\{z\}$, por lo que del TFC para integrales de contorno, proposición 35.1, para $z\in U$ tenemos que: \begin{equation*} \int_{\gamma} \frac{1}{(\zeta-z)^2} d\zeta = \int_{\gamma} f(\zeta) d\zeta = 0. \end{equation*}Por lo que $n'(\gamma,z) = 0$ en $U$, entonces de la proposición 19.2 concluimos que $n(\gamma,z)$ es una función constante en cada componente de $U$.
Sea $r>0$ tal que el conjunto compacto $\gamma([a,b])$ está contenido en el disco abierto $B(0,r)$. Tenemos que el conjunto $\mathbb{C}\setminus B(0,r)$ es un subconjunto conexo de $U$, entonces por la proposición 10.6(1) se cumple que dicho conjunto conexo está contenido en alguna componente conexa $D$ de $U$. Notemos que la componente conexa $D$ es la única componente no acotada de $U$, ya que todas las demás componentes claramente subconjuntos de $B(0,r)$.
Como el punto $z_0=2r \in D$ y la función $f(\zeta) = (\zeta – z_0)^{-1}$ es analítica en $B(0,r)$, por el teorema (local) integral de Cauchy, teorema 36.3, tenemos que: \begin{equation*} n(\gamma,z_0)= \frac{1}{2\pi i}\int_{\gamma} \frac{1}{\zeta-z} d\zeta = 0. \end{equation*}Entonces, por el inciso anterior tenemos que $n(\gamma,z) = 0$ para todo $z\in D$.
$\blacksquare$
Observación 36.5. De acuerdo con lo anterior, el índice de un contorno $n(\gamma,z_0)$ tiene una interpretación geométrica clara, ya que nos dice el número de vueltas que el contorno cerrado $\gamma$ le da al punto $z_0$ y su signo está determinado por la orientación del contorno, es decir, si $\gamma$ tiene orientación positiva entonces $n(\gamma,z_0)$ es positivo, mientras que si $\gamma$ tiene orientación negativa entonces $n(\gamma,z_0)$ es negativo.
Más aún, si el contorno cerrado $\gamma$ es simple y el punto $z_0$ está en el interior de $\gamma$, entonces $n(\gamma,z_0)=1$, mientras que si $z_0$ está fuera del contorno entonces $n(\gamma,z_0)=0$.
Motivados en lo anterior establecemos la siguiente definición, la cual es consistente con el teorema de la curva de Jordan.
Definición 36.2. (Interior de un contorno cerrado simple.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, y $\gamma: [a,b]\to\mathbb{C}$ un contorno cerrado simple en $\mathbb{C}$. Se define al interior de$\gamma$ como el conjunto: \begin{equation*} I(\gamma):= \{z\in\mathbb{C} : n(\gamma,z) \neq 0\}. \end{equation*}
Algunas de las propiedades más elementales del índice de un contorno están dadas en la siguiente:
Proposición 36.2. (Propiedades del índice de un contorno.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, y $\gamma, \beta: [a,b]\to\mathbb{C}$ dos contornos cerrados en $\mathbb{C}$ con el mismo punto inicial. Se cumplen las siguientes propiedades.
$n(-\gamma,z) = -n(\gamma,z)$, para todo $z\in\mathbb{C}\setminus\gamma([a,b])$.
$n(\gamma+\beta,z) = n(\gamma,z)+n(\beta,z)$, para todo $z\in\mathbb{C}\setminus\left(\gamma([a,b]) \cup \beta([a,b])\right)$.
$n(\overline{\gamma},\overline{z}) = -n(\gamma,z)$, para todo $z\in\mathbb{C}\setminus\gamma([a,b])$.
n(a\gamma+b,az+b) = n(\gamma,z)$, para todo $z\in\mathbb{C}\setminus\gamma([a,b])$, con $a\neq 0$ y $b$ dos constantes.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 36.4. Sean $r>0$ y $z_0\in\mathbb{C}$ un punto fijo. Consideremos a la circunferencia $C(z_0,r)$ y al disco abierto $B(z_0,r)$.
a) Sea $\gamma:[0,2\pi] \to \mathbb{C}$ dada por $\gamma(t)=z_0 + re^{it}$, es decir, $\gamma$ parametriza a la circunferencia $C(z_0,r)$ positivamente. Si $z\in B(z_0,r)$, entonces por el lema 36.2(1), la definición 36.1 y el ejemplo 34.1(a) tenemos que: \begin{align*} n(\gamma,z) & = n(\gamma,z_0)\\ & = \frac{1}{2\pi i} \int_{\gamma} \frac{1}{\zeta – z_0} d\zeta\\ & = \frac{1}{2\pi i} 2\pi i\\ & = 1. \end{align*}
Más aún, por el lema 36.2(2), tenemos que si $z\in \mathbb{C} \setminus B(z_0,r)$, entonces $n(\gamma,z) = 0$.
b) Sea $\gamma:[0,2\pi] \to \mathbb{C}$ dada por $\gamma(t)=z_0 + re^{-it}$, es decir, $\gamma$ parametriza a la circunferencia $C(z_0,r)$ negativamente. Si $z\in B(z_0,r)$, entonces por el lema 36.2(1), la definición 36.1 y la definición 34.1 tenemos que: \begin{align*} n(\gamma,z) & = n(\gamma,z_0)\\ & = \frac{1}{2\pi i} \int_{\gamma} \frac{1}{\zeta – z_0} d\zeta\\ & = \frac{1}{2\pi i} \int_{0}^{2\pi} \frac{\gamma'(t)}{\gamma(t) – z_0} dt\\ & = \frac{1}{2\pi i} \int_{0}^{2\pi} \frac{-ire^{-it}}{z_0 + re^{-it} – z_0} dt\\ & = -\frac{i}{2\pi i} \int_{0}^{2\pi} dt\\ & = -\frac{i}{2\pi i} 2\pi\\ & = -1. \end{align*}
Del lema 36.2(2), se sigue que para $z\in \mathbb{C} \setminus B(z_0,r)$, se cumple que $n(\gamma,z) = 0$.
c) Sea $\gamma:[0,2\pi n] \to \mathbb{C}$, con $n\in\mathbb{N}^+$, dada por $\gamma(t)=z_0 + re^{it}$, es decir, $\gamma$ parametriza a la circunferencia $C(z_0,r)$ positivamente, pero la recorre $n$-veces. Si $z\in B(z_0,r)$, entonces por el lema 36.2(1), la definición 36.1 y la definición 34.1 tenemos que: \begin{align*} n(\gamma,z) & = n(\gamma,z_0)\\ & = \frac{1}{2\pi i} \int_{\gamma} \frac{1}{\zeta – z_0} d\zeta\\ & = \frac{1}{2\pi i} \int_{0}^{2\pi n} \frac{\gamma'(t)}{\gamma(t) – z_0} dt\\ & = \frac{1}{2\pi i} \int_{0}^{2\pi n} \frac{ire^{-it}}{z_0 + re^{-it} – z_0} dt\\ & = \frac{i}{2\pi i} \int_{0}^{2\pi n} dt\\ & = \frac{i}{2\pi i} 2\pi n\\ & = n. \end{align*}
Más aún, por el lema 36.2(2), tenemos que si $z\in \mathbb{C} \setminus B(z_0,r)$, entonces $n(\gamma,z) = 0$.
De acuerdo con los resultados previos, estamos listos para establecer una de las primeras consecuencias del teorema integral de Cauchy generalizado, para discos, mediante el cual podremos obtener una representación fundamental de una función analítica.
Proposición 36.3. (Fórmula integral de Cauchy para discos.) Sean $r>0$, $z_0\in \mathbb{C}$ un punto fijo, $f:B(z_0, r) \to \mathbb{C}$ una función analítica en el disco abierto $B(z_0, r)$ y $\gamma$ un contorno cerrado en $B(z_0,r)$. Entonces: \begin{equation*} n(\gamma, z) f(z) = \frac{1}{2\pi i}\int_{\gamma} \frac{f(\zeta)}{\zeta-z} d\zeta, \end{equation*}para todo $z \in B(z_0,r)\setminus\gamma([a,b])$.
Demostración. Dadas las hipótesis, fijamos un punto $z \in B(z_0,r)\setminus\gamma([a,b])$. Definimos a la función: \begin{equation*} g:B(z_0,r)\to\mathbb{C}, \end{equation*} como: \begin{equation*} g(\zeta)= \left\{ \begin{array}{lcc} \dfrac{f(\zeta) – f(z)}{\zeta – z} & \text{si} & \zeta \neq z, \\ \\ f'(z) & \text{si} & \zeta = z, \end{array} \right. \end{equation*}donde $\zeta$ es una variable independiente.
Es claro que $g$ es una función analítica en $B(z_0,r)\setminus\{z\}$. Más aún, como $f$ es analítica en $B(z_0,r)$, entonces: \begin{equation*} \lim_{\zeta \to z} g(\zeta) = \lim_{\zeta \to z} \dfrac{f(\zeta) – f(z)}{\zeta – z} = f'(z) = g(z), \end{equation*}es decir, $g$ es continua en $z$, por lo que: \begin{equation*} \lim_{\zeta \to z} (\zeta – z) g(\zeta) = 0. \end{equation*}
Como $z$ no está en el contorno cerrado $\gamma$, del teorema 36.4 y la definición 36.1, tenemos que: \begin{align*} 0 & = \int_{\gamma} g(\zeta) d\zeta\\ & = \int_{\gamma} \dfrac{f(\zeta) – f(z)}{\zeta – z} d\zeta\\ & = \int_{\gamma} \dfrac{f(\zeta)}{\zeta – z} d\zeta – \int_{\gamma} \dfrac{f(z)}{\zeta – z} d\zeta\\ & = \int_{\gamma} \dfrac{f(\zeta)}{\zeta – z} d\zeta – 2\pi i \, n(\gamma,z) f(z), \end{align*}es decir: \begin{equation*} n(\gamma,z) f(z) = \frac{1}{2\pi i}\int_{\gamma} \dfrac{f(\zeta)}{\zeta – z} d\zeta. \end{equation*}Dado que $z \in B(z_0,r)\setminus\gamma([a,b])$ es arbitrario, entonces se tiene el resultado.
$\blacksquare$
Observación 36.6. Un aspecto importante de la fórmula integral de Cauchy es que para un punto $z\in\mathbb{C}$ para el cual $n(\gamma, z)\neq 0$, podemos expresar el valor de la función $f(z)$ de manera explícita en términos de los valores de $f$ que se encuentran en el contorno $\gamma$, a cierta distancia de $z$.
La aplicación más usual de la fórmula integral de Cauchy se tiene para el caso en que $n(\gamma, z)=1$, ya que bajo dicha condición se tiene que: \begin{equation*} f(z) = \frac{1}{2\pi i}\int_{\gamma} \frac{f(\zeta)}{\zeta-z} d\zeta. \end{equation*}
Ejemplo 36.5. Evaluemos la integral: \begin{equation*} \int_{\gamma} \frac{e^{\pi z}}{z^3+z} dz, \end{equation*}donde $\gamma$ parametriza positivamente a la circunferencia $C(0,2)$.
Solución. Primeramente parametrizamos a la circunferencia $C(0,2)$ como $\gamma(t)=2e^{it}$, con $0\leq t\leq 2\pi$.
Notemos que para todo $z\in B(0,2)$, por el ejemplo 36.4(a), se cumple que: \begin{equation*} n(\gamma,z) = n(\gamma,0) = 1. \end{equation*}
Sea $f(z)= e^{\pi z}$. Claramente $f$ es una función entera, por lo que para $r>2$, se cumple que $C(0,2) \subset B(0,r)$ y $f$ es analítica en $B(0,r)$. Entonces, de la fórmula integral de Cauchy para discos, como $0,i, -i \in B(0,2) \subset B(0,r)$, tenemos que: \begin{align*} \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta} d\zeta = \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta – 0} d\zeta & = 2\pi i \, n(\gamma, 0) f(0)\\ & = 2\pi i (1)(e^{0})\\ & = 2\pi i. \end{align*} \begin{align*} \int_{\gamma} \frac{e^{\pi \zeta}}{2(\zeta-i)} d\zeta = \frac{1}{2} \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta – i} d\zeta & = \frac{2\pi i \, n(\gamma, i) f(i)}{2}\\ & = \frac{2\pi i (1)(e^{i\pi})}{2}\\ & = -\pi i. \end{align*} \begin{align*} \int_{\gamma} \frac{e^{\pi \zeta}}{2(\zeta+i)} d\zeta = \frac{1}{2} \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta + i} d\zeta & = \frac{2\pi i \, n(\gamma, -i) f(-i)}{2}\\ & = \frac{2\pi i (1)(e^{-i\pi})}{2}\\ & = -\pi i. \end{align*}
De la proposición 34.2(1) tenemos que: \begin{align*} \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta^3+\zeta} d\zeta & = \int_{\gamma} \frac{e^{\pi \zeta}}{\zeta}d\zeta – \int_{\gamma} \frac{e^{\pi \zeta}}{2(\zeta-i)} d\zeta -\int{\gamma} \frac{e^{\pi \zeta}}{2(\zeta+i)} d\zeta\\ & = 2\pi i – (-i\pi) – (-i\pi)\\ & = 4\pi i. \end{align*}
Por lo que: \begin{equation*} \int_{\gamma} \frac{e^{\pi z}}{z^3+z} dz = 4\pi i. \end{equation*}
Ejemplo 36.6. Veamos que: \begin{equation*} \int_{\gamma} \frac{e^{i\pi z}}{2z^2-5z+2} dz = \frac{2\pi}{3}, \end{equation*}donde $\gamma$ es la circunferencia unitaria $C(0,1)$, orientada positivamente.
Solución. Tenemos que $\gamma(t) = e^{it}$, para $0\leq t\leq 2\pi$, parametriza a la circunferencia unitaria $C(0,1)$, positivamente. Factorizando el denominador del integrando, tenemos que $2z^2-5z+2 = (2z-1)(z-2)$, es decir, $z_0=1/2$ y $z_1 = 2$ son las raíces de dicho polinomio complejo. Como $1/2$ está en el interior de $\gamma$, por el lema 36.2(1) y el ejemplo 36.4(a), concluimos que: \begin{equation*} n(\gamma, 1/2) = n(\gamma, 0) = 1. \end{equation*}
Sea $f(z) = \dfrac{e^{i\pi z}}{z-2}$. Claramente $f$ es analítica en $D=\mathbb{C}\setminus\{2\}$, por lo que es analítica en $B(0,2)\subset D$ y $\gamma$ está completamente contenida en $D$, entonces, por la fórmula integral de Cauchy (para discos), tenemos que: \begin{align*} \int_{\gamma} \frac{e^{i\pi z}}{2z^2-5z+2} dz & = \int_{\gamma} \frac{e^{i\pi z}}{(2z-1)(z-2)}dz\\ & = \int_{\gamma} \frac{f(z)}{2z-1} dz\\ & = \frac{1}{2} \int_{\gamma} \frac{f(z)}{z-1/2} dz\\ & = \pi i \, n(\gamma,1/2) f(1/2)\\ & = \pi i (1) \frac{e^{i \pi/2}}{\frac{1}{2} – 2}\\ & = \frac{2\pi}{3}. \end{align*}
Procedemos ahora a establecer una consecuencia de la fórmula integral de Cauchy, la cual nos deja ver claramente las diferencias entre el Cálculo Complejo y el Cálculo Real.
Proposición 36.4. Sean $U\subset\mathbb{C}$ un conjunto abierto y $f:U \to \mathbb{C}$ una función analítica en $U$. Entonces $f’$ también es analítica en $U$. En particular $f\in C^{1}(U)$.
Demostración. Dadas las hipótesis, basta probar que cada $z_0\in U$ es el centro de algún disco abierto $D$ en el cual $f’$ es analítica, por lo que $f^{(2)}(z_0) = (f’)'(z_0)$ existe.
Sean $z_0 \in U$ fijo y $r>0$ tal que $B(z_0,r) \subset U$. Fijamos a $s$ tal que $0<s<r$ y definimos a $D = B(z_0,s)$. Por la fórmula integral de Cauchy para discos, aplicada al disco $B(z_0,r)$ y al contorno $\gamma = \partial D$ orientado positivamente, es decir, $\gamma(t)=z_0+se^{it}$, con $0\leq t\leq 2\pi$, tenemos que: \begin{equation*} f(z) = \frac{1}{2\pi i} \int_{\gamma} \frac{f(\zeta)}{\zeta – z} d \zeta, \quad \forall z\in D. \end{equation*}
Del lema 36.2(1) se sigue que: \begin{equation*} n(\gamma,z) = n(\gamma,z_0) = \frac{1}{2\pi i} \int_{0}^{2\pi} \frac{ise^{it}}{se^{it}} dt = 1, \end{equation*}para todo $z\in D$.
Del lema 36.1, aplicado a $\varphi$ para el caso $n=1$, tenemos que: \begin{equation*} F_1(z) = \frac{1}{2\pi i} \int_{\gamma} \frac{f(\zeta)}{\zeta – z} d \zeta = f(z), \quad \forall z\in D, \end{equation*}por lo que: \begin{equation*} f'(z) = \frac{1}{2\pi i} \int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^2} d \zeta, \end{equation*}para todo $z \in D$. Aplicando el lema 36.1, para el caso $n=2$, tenemos que: \begin{equation*} f'(z) = F_1′(z) = F_2(z), \end{equation*}donde $F_2$ es una función analítica en $\mathbb{C}\setminus\gamma([0,2\pi])$. Por lo tanto, $f’$ es analítica en $D\subset\mathbb{C}\setminus\gamma([0,2\pi])$.
Como $z_0 \in U$ es arbitrario, entonces $f$ es analítica en $U$.
Por último, dado que $f$ es analítica en $U$, para $f(z)=u(x,y)+iv(x,y)$, por el teorema 17.1 tenemos que existen las derivadas parciales $u_x, u_y, v_x$ y $v_y$ y satisfacen las ecuaciones de C-R en $U$, es decir: \begin{equation*} f'(z) = f_x = i f_y, \end{equation*}y como $f’$ es analítica en $U$, en particular es continua en $U$, por lo que las derivadas parciales $u_x, u_y, v_x$ y $v_y$ son continuas en $U$ y por tanto $f\in C^{1}(U)$.
$\blacksquare$
Corolario 36.3. Sean $U\subset\mathbb{C}$ un conjunto abierto y $f:U \to \mathbb{C}$ una función analítica en $U$. Entonces $f$ es indefinidamente diferenciable en $U$ y todas las derivadas $f’, f^{(2)}, \ldots, f^{(k)}, \ldots$, también son funciones analíticas en $U$. En particular $f\in C^{\infty}(U)$.
Demostración. Se sigue del resultado anterior al aplicar inducción, por lo que los detalles se dejan como ejercicio al lector.
$\blacksquare$
Proposición 36.5. (Fórmula integral de Cauchy para derivadas, en discos.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $z_0\in\mathbb{C}$ fijo, $r>0$, $f:B(z_0,r) \to \mathbb{C}$ una función analítica en el disco abierto $B(z_0,r)$ y $\gamma:[a,b]\to B(z_0,r)$ un contorno cerrado en $B(z_0,r)$. Entonces, para todo $n\in\mathbb{N}$: \begin{equation*} n(\gamma, z) f^{(n)}(z) = \frac{n!}{2\pi i}\int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+1}} d\zeta, \end{equation*}para todo $z\in B(z_0,r)\setminus\gamma([a,b])$.
Demostración. Dadas las hipótesis, procedemos por inducción sobre $n$. Para $n=0$ tenemos que $f^{(0)}=f$, por lo que el resultado se sigue de la fórmula integral de Cauchy (para discos), proposición 36.3, para toda función analítica en $B(z_0,r)$. Supongamos que el resultado se cumple para algún $n\in\mathbb{N}$ fijo. Verifiquemos que el resultado se cumple para $n+1$.
Como $f$ es analítica en $B(z_0,r)$, por la proposición 36.4, tenemos que $f’$ también es analítica en $B(z_0,r)$. Sea $z\in B(z_0,r)\setminus\gamma([a,b])$ fijo, entonces por hipótesis de inducción, aplicada a $f’$, tenemos que: \begin{equation*} n(\gamma, z) f^{(n+1)}(z) = n(\gamma, z) (f’)^{(n)}(z) = \frac{n!}{2\pi i}\int_{\gamma} \frac{f'(\zeta)}{(\zeta – z)^{n+1}} d\zeta. \tag{36.5} \end{equation*}
Es claro que $g$ es analítica en $B(z_0,r)\setminus\{z\}$ y su derivada es: \begin{equation*} g'(\zeta) = \frac{f'(\zeta)}{(\zeta – z)^{n+1}} – \frac{(n+1)f(\zeta)}{(\zeta – z)^{n+2}}. \end{equation*}
Notemos que $g’$ es una función continua en $B(z_0,r)\setminus\{z\}$ y tiene como primitiva a $g$, por lo que del TFC para integrales de contorno, proposición 35.1, y la proposición 34.2(1), tenemos que: \begin{align*} 0 & = \int_{\gamma} g'(\zeta) d\zeta\\ & = \int_{\gamma} \frac{f'(\zeta)}{(\zeta – z)^{n+1}} d\zeta – (n+1) \int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+2}} d\zeta, \end{align*}es decir: \begin{equation*} \int_{\gamma} \frac{f'(\zeta)}{(\zeta – z)^{n+1}} d\zeta = (n+1) \int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+2}} d\zeta. \tag{36.6} \end{equation*}
Entonces, de (36.5) y (36.6) se sigue que: \begin{align*} n(\gamma, z) f^{(n+1)}(z) & = \frac{n!}{2\pi i}\int_{\gamma} \frac{f'(\zeta)}{(\zeta – z)^{n+1}} d\zeta\\ & = \frac{n!}{2\pi i} (n+1) \int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+2}} d\zeta\\ & = \frac{(n+1)!}{2\pi i} \int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+2}} d\zeta. \end{align*}
Dado que $z\in B(z_0,r)\setminus\gamma([a,b])$ es arbitrario y $f$ una función arbitraria, analítica en $B(z_0,r)$, entonces para todo $n\in\mathbb{N}$ y $z\in B(z_0,r)\setminus\gamma([a,b])$ se cumple que: \begin{equation*} n(\gamma, z) f^{(n)}(z) = \frac{n!}{2\pi i}\int_{\gamma} \frac{f(\zeta)}{(\zeta – z)^{n+1}} d\zeta. \end{equation*}
$\blacksquare$
Ejemplo 36.7. Sea $B(z_0,r) \subset\mathbb{C}$ un disco abierto y $f:B(z_0,r) \to\mathbb{C}$ una función analítica en dicho disco. Si $\gamma$ es un contorno cerrado contenido en $B(z_0,r)$ y $\zeta$ es un punto en el interior de $\gamma$ veamos que: \begin{equation*} \frac{1}{n!} \int_{\gamma} \frac{f^{(n)}(z)}{z-\zeta} dz = \int_{\gamma} \frac{f(z)}{(z-\zeta)^{n+1}} dz. \end{equation*}
Solución. Como la función $f$ es analítica en $B(z_0,r)$, entonces $f^{(n)}$ es analítica $B(z_0,r)$. Por la fórmula integral de Cauchy tenemos que: \begin{equation*} n(\gamma,\zeta) f^{(n)}(\zeta) = \frac{1}{2\pi i}\int_{\gamma} \dfrac{f^{(n)}(z)}{z-\zeta} dz. \end{equation*}
Por otra parte, de la fórmula integral de Cauchy para derivadas tenemos que: \begin{equation*} n(\gamma,\zeta) f^{(n)}(\zeta) = \frac{n!}{2\pi i}\int_{\gamma} \dfrac{f(z)}{(z-\zeta)^{n+1}} dz. \end{equation*}
Ejemplo 36.8. Veamos que: \begin{equation*} \int_{\gamma} \frac{e^{z^2}}{(z-i)^4} dz = -\frac{4\pi}{3e}, \end{equation*}donde $\gamma$ es la circunferencia $C(0,2)$ con orientación positiva.
Solución. Tenemos que $\gamma(t) = 2e^{it}$, para $0\leq t\leq 2\pi$, parametriza a la circunferencia $C(0,2)$, positivamente. Como $i$ está en el interior de $\gamma$, por el lema 36.2(1) y el ejemplo 36.4(a), concluimos que: \begin{equation*} n(\gamma, i) = n(\gamma, 0) = 1. \end{equation*}
Sea $f(z) = e^{z^2}$. Claramente $f$ es una función entera, por lo que en particular es analítica en cualquier disco abierto $B(0,r)$, con $r>2$. Utilizando las reglas de derivación tenemos que: \begin{equation*} f^{(3)}(z) = (12z+8z^3)e^{z^2}. \end{equation*}
Como $\gamma$ está completamente contenida en el disco abierto $B(0,r)$, con $r>2$, entonces, por la fórmula integral de Cauchy para derivadas (en discos), tenemos que: \begin{align*} \int_{\gamma} \frac{e^{z^2}}{(z-i)^4} dz & = \frac{2\pi i}{3!} n(\gamma,i) f^{(3)}(i)\\ & = \frac{\pi i}{3} (1) \left[12i+8i^3\right]e^{i^2}\\ & = \frac{\pi i }{3e} (4i)\\ & = – \frac{4\pi}{3e}. \end{align*}
Tarea moral
Determina el valor de las siguientes integrales, donde cada circunferencia está orientada positivamente. a) $\displaystyle \int_{C(0,1)} (z^2+2z)^{-1} dz$. b) $\displaystyle \int_{C(-i,3/2)} (z^4+z^2)^{-1} dz$.
Sea $b>0$. Muestra que: \begin{equation*} \int_{-\infty}^{\infty} e^{-t^2} \operatorname{cos}(2b\pi t)dt = \sqrt{\pi} e^{-b^2\pi^2}. \end{equation*} Hint: Considera la integral: \begin{equation*} \int_{\partial R} e^{-z^2} dz, \end{equation*}donde $R$ es el rectángulo con vértices en $-c, c, c+b\pi i$ y $-c+b\pi i$, para $c>0$.
Evalúa las siguientes integrales, donde cada circunferencia está orientada positivamente. a) $\displaystyle \int_{C(0,1)} \operatorname{Log}(z+e) z^{-1} dz$. b) $\displaystyle \int_{C(0,2)} e^z(z+1)^{-2} dz$.
Muestra que: \begin{equation*} \int_{0}^{\infty} t^{-1} \operatorname{sen}(t)dt = \frac{\pi}{2}. \end{equation*} Hint: Considera la integral: \begin{equation*} \int_{\gamma} z^{-1} e^{iz} dz, \end{equation*},donde el contorno de integración está dado por $\gamma=[s,r] + \gamma_r + [-r,-s] -\gamma_s$, para $0<s<r<\infty$, $\gamma_r(t)=re^{it}$ y $\gamma_s(t)=se^{it}$, ambas con $t\in[0,\pi]$.
Para $k\in\mathbb{N}^+$, define: \begin{equation*} I_k := \int_{\gamma_k} \frac{\operatorname{sen}(z)}{z} dz, \end{equation*}donde $\gamma_k(t) = e^{t+it}$, para $t\in[-2\pi k, 2\pi k]$. Determina el $\lim\limits_{k\to \infty} I_k$. Hint: Usa el ejercicio anterior.
Demuestra la proposición 36.2.
Sea $\gamma = \gamma_1+\gamma_2+\gamma_3$, donde $\gamma_1(t)=e^{it}$, con $0\leq t\leq 2\pi$, $\gamma_2(t)=-1+2e^{-2it}$, con $0\leq t\leq 2\pi$ y $\gamma_3(t)=1-i+e^{it}$, con $\pi/2\leq t\leq 9\pi/2$. Determina todos los valores que toma $n(\gamma,z)$ para $z\in \mathbb{C}\setminus\gamma$.
Más adelante…
En esta entrada hemos probado algunos resultado importantes sobre las integrales de contorno como el Teorema Fundamental del Cálculo para el caso complejo y el lema de Goursat, que como veremos nos permitirá probar el Teorema de Cauchy para el caso en que se tiene un contorno cerrado arbitrario.
En la siguiente entrada probaremos algunas versiones del Teorema integral de Cauchy y abordaremos algunas de sus consecuencias más importantes, como la Fórmula Integral de Cauchy, el Teorema de Liouville, el Teorema Fundamental del Álgebra, entre otros. Además veremos un recíproco del Teorema de Cauchy conocido como el Teorema de Morera.
Dos de las nociones básicas de la topología son la de homotopía y homología. La relación de homotopía describe las características topológicas de dos espacios topológicos en términos de familias de contornos que varían continuamente. Mientras que la homología es una propiedad topológica de un dominio $D\subset\mathbb{C}$, la cual se puede definir en términos de propiedades de contornos en $D$. Los dos conceptos están relacionados, pero son diferentes.
La versión local del teorema integral de Cauchy, dada en el Teorema 36.3, enfatiza la topología del dominio y cómo el camino se encuentra dentro de él. Para mejorar nuestra comprensión de este hecho, examinamos estas cuestiones topológicas con más detalle. En esta entrada lo haremos de dos maneras: mediante el concepto de homotopía y de homología, para ello consideramos deformaciones continuas de un contorno $\gamma$, dada por la noción topológica de homotopía.
Como veremos, tanto el concepto de homotopía como el de homología formalizan la idea de que un dominio $D\subset\mathbb{C}$ tiene «agujeros», y el hecho de que la integral a lo largo de un contorno $\gamma$ depende de cómo se recorre dicho contorno en el dominio $D$, en relación con estos agujeros. Sin embargo, ambos conceptos lo hacen de forma diferente, aunque relacionada. La homotopía es más fácil para visualizar y geométricamente bastante natural, mientras que la homología es algebraicamente más simple. En esta entrada reformularemos el teorema integral de Cauchy desde estos dos conceptos y extenderemos la versión local del teorema de Cauchy a dominios en el plano complejo $\mathbb{C}$ más generales.
El enfoque que tomamos en esta entrada se basa en el concepto geométrico de deformación de contornos. Por ejemplo, si $\gamma_0$ describe a la semicircunferencia en el semiplano superior de $\mathbb{C}$ que va de $1$ a $-1$, es decir, orientada positivamente, entonces: \begin{equation*} \gamma_0(t) = e^{it}, \quad \forall \, t\in[0,\pi]. \end{equation*}
Por otra parte, si $\gamma_1$ describe a la semicircunferencia en el semiplano inferior de $\mathbb{C}$ que va de $1$ a $-1$, es decir, orientada negativamente, entonces: \begin{equation*} \gamma_1(t) = e^{-it}, \quad \forall \, t\in[0,\pi]. \end{equation*}
Geométricamente es fácil visualizar que podemos deformar a $\gamma_0$ en $\gamma_1$ por un desplazamiento vertical, figura 138.
Podemos formalizar lo anterior de forma analítica considerando a la función: \begin{equation*} \gamma_s(t)=(1-s)e^{it}+se^{-it}, \end{equation*}donde $t\in [0,\pi]$ y $s\in[0,1]$.
Entonces, $\gamma_0$ y $\gamma_1$ son dos contornos semicirculares y el contorno $\gamma_s$ varía continuamente conforme $s$ varía continuamente de $0$ a $1$.
Sin embargo, si los contornos no deben pasar por el origen, por ejemplo al considerar a la función $f(z)=z^{-1}$, tenemos que $f$ es continua en $D=\mathbb{C}\setminus\{0\}$, pero para $\gamma_{1/2}$, si $t=\pi/2$, entonces dicho contorno pasa por el origen, es decir, puede haber contornos en $D$ cuya deformación pase por el origen, como es el caso de la deformación $\gamma_s$. De hecho, se puede verificar que no existe ninguna deformación continua de $\gamma_0$ en $\gamma_1$ sin que algún contorno intermedio pase por el origen.
Entonces, el origen se vuelve un obstáculo para deformar el contorno, y cualquier intento de hacerlo hace que el camino $\gamma_s$ pase por el origen. Es decir, el origen crea un agujero y el contorno no puede cruzar el agujero.
Figura 138: Deformación continua del contorno $\gamma_0$ en el contorno $\gamma_1$.
Primeramente formalizamos lo que es una homotopía en el plano complejo $\mathbb{C}$.
Definición 38.1.(Homotopía.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio y $\gamma_0, \gamma_1 : [a,b] \to D$ dos contornos. Una homotopía entre $\gamma_0$ y $\gamma_1$ es una función continua: \begin{equation*} H:[a,b]\times[0,1] \to D, \end{equation*}tal que: \begin{align*} H(t,0) &= \gamma_0(t), \quad \forall t\in[a,b],\\ H(t,1) &= \gamma_1(t), \quad \forall t\in[a,b]. \end{align*}
Cuando existe tal homotopía, se dice que $\gamma_0$ y $\gamma_1$ son homotópicas en $D$, lo cual se denota como $\gamma_0 \sim_{D} \gamma_1$.
Observación 38.1. Si $\gamma_s(t):=H(t,s)$, entonces, para cada $s\in[0,1]$ fijo, $\gamma_s$ es un contorno en $D$, el cual deforma continuamente a $\gamma_0$ en $\gamma_1$, conforme $s$ varía continuamente de $0$ a $1$.
Nuestro objetivo es aplicar esta definición de homotopía a la integración compleja al considerar qué sucede con $\int_\gamma f(z) dz$ cuando permitimos que el contorno $\gamma$ varíe continuamente, por lo que resulta preciso establecer condiciones bajo las cuales $\gamma$ puede deformarse continuamente sin cambiar la integral.
Una definición precisa de estas homotopías es motivado por los siguientes tres supuestos:
Si $z_0$ y $z_1$ son puntos en un dominio $D\subset\mathbb{C}$, $\gamma_0$ y $\gamma_1$ son dos contornos en $D$ que unen a $z_0$ con $z_1$. Es, decir, $\gamma_0$ y $\gamma_1$ tienen como punto inicial a $z_0$ y como punto final a $z_1$. Entonces, es posible deformar continuamente a $\gamma_0$ para que coincida con $\gamma_1$, manteniendo los extremos fijos en $z_0$ y $z_1$, sin salir de $D$.
Si $\gamma_0$ y $\gamma_1$ son dos contornos cerrados en un dominio $D\subset\mathbb{C}$, es posible deformar continuamente a $\gamma_0$ para que coincida con $\gamma_1$, en posición y orientación, sin salir de $D$.
Si $\gamma_0$ es un contorno cerrado en un dominio $D\subset\mathbb{C}$, es posible deformar continuamente a $\gamma_0$ a un punto $z_0\in D$, sin salir de $D$. Esta situación es un caso particular del anterior, cuando el $\gamma_1(t) = z_0$ para todo $t$, es decir, se degenera en un punto.
En cualquier caso las deformaciones deben mantener al contorno dentro del dominio $D\subset\mathbb{C}$ donde la función $f$ es analítica.
Motivados en lo anterior, planteamos las siguientes definiciones.
Definición 38.2. (Homotopía con extremos fijos.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio, $\gamma_0, \gamma_1 : [a,b] \to D$ dos contornos tales que $\gamma_0(0) = \gamma_1(0) = z_0 \in D$ y $\gamma_0(1) = \gamma_1(1) = z_1 \in D$. Se dice que $\gamma_0$ es {\bf homótopica con extremos fijos} a $\gamma_1$ si existe una función continua: \begin{equation*} H:[a,b]\times[0,1] \to D, \end{equation*}tal que:
$H(t,0) = \gamma_0(t), \quad \forall t\in[a,b]$,
$H(t,1) = \gamma_1(t), \quad \forall t\in[a,b]$,
$H(a,s) = z_0, \quad \forall s\in[0,1]$,
$H(b,s) = z_1, \quad \forall s\in[0,1]$.
La función continua $H$ se llama una homotopía con extremos fijos o una deformación continua con extremos fijos.
Observación 38.2. Si $\gamma_s(t):=H(t,s)$, entonces, para cada $s\in[0,1]$ fijo, $\gamma_s$ es un contorno en $D$ que une a $z_0$ con $z_1$. Conforme $s$ varía continuamente de $0$ a $1$, el contorno $\gamma_s$ deforma continuamente a $\gamma_0$ en $\gamma_1$.
Ejemplo 38.1. Sean $D=\{z\in\mathbb{C} : |z|<2\} = B(0,2)$, $\gamma_0(t)=t$ y $\gamma_1(t)=e^{i\pi/2 (t-1)}$, ambas con $t\in[-1,1]$. Veamos que $\gamma_0$ es homotópica con extremos fijos a $\gamma_1$.
Solución. Sea $z_0 = -1$ y $z_1 = 1$. De acuerdo con la definición 38.2 solo basta con exhibir una función continua $H:[-1,1]\times[0,1] \to D$ que satisfaga las cuatro propiedades.
Separando a $H$ en su parte real e imaginaria, por la proposición 15.1, es claro que $H$ es continua ya que $\gamma_0$ y $\gamma_1$ son continuas. Más aún, para todo $t\in[-1,1]$ se cumple que $H(t,0) = \gamma_0(t)$ y $H(t,1) = \gamma_1(t)$. Mientras que para todo $s\in[0,1]$ se cumple que: \begin{equation*} H(-1,s) = (1-s)(-1) + s(e^{-i\pi}) = -1+s+s(-1) = -1 = z_0. \end{equation*} \begin{equation*} H(1,s) = (1-s)(1) + s(e^{0}) = 1-s + s(1)= 1 = z_1. \end{equation*}
Por lo tanto $\gamma_0$ es homotópica con extremos fijos a $\gamma_1$, figura 139.
Figura 139: Homotopía con extremos fijos del contorno $\gamma_0$ en el contorno $\gamma_1$, en el dominio $D$.
Definición 38.3. (Homotopía de contornos cerrados y homotopía a un punto.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio, $\gamma_0, \gamma_1 : [a,b] \to D$ dos contornos cerrados en $D$. Se dice que $\gamma_0$ y $\gamma_1$ son {\bf homótopicas como contornos cerrados}, si existe una función continua: \begin{equation*} H:[a,b]\times[0,1]\to D, \end{equation*}tal que:
$ H(t,0) = \gamma_0(t), \quad \forall t\in[a,b]$,
$H(t,1) = \gamma_1(t), \quad \forall t\in[a,b]$,
$H(a,s) = H(b,s), \quad \forall s\in[0,1]$.
La función continua $H$ se llama una homotopía de contornos cerrados o una deformación continua de contornos cerrados.
Si $\gamma_1$ es un contorno constante, es decir, $\gamma_1(t)=z_0$ para todo $t\in[a,b]$ y $z_0\in D$, entonces se dice que $\gamma_0$ es homotópica a un punto $z_0$ en el dominio $D$.
Observación 38.3. Si $\gamma_s(t):=H(t,s)$, entonces, para cada $s\in[0,1]$ fijo, $\gamma_s$ es un contorno cerrado en $D$, para todo $s\in[0,1]$. Conforme $s$ varía continuamente de $0$ a $1$, el contorno $\gamma_s$ deforma continuamente a $\gamma_0$ en $\gamma_1$.
Más aún, si $\gamma_0$ es homotópica a un punto $z_0\in D$, la tercera condición de la definición 38.3 establece que el punto inicial de $H(0,s)$ y el punto final de $H(1,s)$ son el mismo.
Ejemplo 38.2. Veamos que la circunferencia unitaria y la elipse $\dfrac{x^2}{4}+y^2=1$, ambas orientadas positivamente, son homotópicas como curvas cerradas en la región anular: \begin{equation*} D_1=\left\{z\in\mathbb{C} : \frac{1}{2} < |z| < 3\right\}. \end{equation*}
Mientras que la circunferencia unitaria es homotópica a $0$ en el dominio $D_2 = B(0,3)$.
Solución. Podemos parametrizar a la circunferencia y a la elipse, respectivamente, como: \begin{equation*} \gamma_0(t) = e^{it} \quad \text{y} \quad \gamma_1(t) = 2 \operatorname{cos}(t) + i \operatorname{sen}(t), \quad \forall t\in[0,2\pi]. \end{equation*}
Para la primera parte del ejercicio proponemos a la función $H_1:[0,2\pi] \times [0,1] \to D_1$ dada por: \begin{equation*} H_1(t,s)=(1+s) \operatorname{cos}(t) + i \operatorname{sen}(t). \end{equation*}
Dado que $\gamma_0$ y $\gamma_1$ son funciones continuas, entonces $H_1$ es continua.
Por otra parte, es claro que para todo $t\in[0,2\pi]$ se cumple que $H_1(t,0) = \gamma_0(t)$ y $H_1(t,1) = \gamma_1(t)$. Mientras que para todo $s\in[0,1]$ tenemos que: \begin{equation*} H_1(0,s) = 1+s = H_1(2\pi, s), \end{equation*}por lo que $\gamma_0$ y $\gamma_1$ son homotópicas como curvas cerradas en $D_1$, figura 140.
Figura 140: Homotopía de los contornos cerrados $\gamma_0$ y $\gamma_1$, en el dominio $D_1$.
Para la segunda parte del ejercicio, consideramos a $\gamma_1(t)=0$, para todo $t\in [0,2\pi]$. Proponemos a la función $H_2:[0,2\pi] \times [0,1] \to D_1$ dada por: \begin{equation*} H_2(t,s)=(1-s)\gamma_0(t). \end{equation*}
Claramente $H_2$ es continua. Además, para todo $t\in[0,2\pi]$ se cumple que $H_2(t,0) = \gamma_0(t)$ y $H_2(t,1) = \gamma_1(t)$. Mientras que para todo $s\in[0,1]$ tenemos que: \begin{equation*} H_2(0,s) = (1-s)(1) = H_2(2\pi, s), \end{equation*}por lo que $\gamma_0$ es homotópica a $0$ en $D_2$, figura 141.
Figura 141: Homotopía del contorno cerrado $\gamma_0$ en $0$, en el dominio $D_2$.
Considerando lo anterior, ahora podemos formalizar la idea de un dominio $D\subset\mathbb{C}$ sin agujeros o sin hoyos.
Definición 38.4. (Dominio simplemente conexo y múltiplemente conexo.) Sea $D\subset\mathbb{C}$ un dominio, es decir, un conjunto abierto y conexo. Se dice que $D$ es simplemente conexo si toda curva cerrada en $D$ es homotópica (como una curva cerrada) a un punto en $D$, es decir, a alguna curva constante en $D$.
Si $D$ no es simplemente conexo, entonces se llama múltiplemente conexo. Un dominio múltiplemente conexo con $n$ agujeros u hoyos, se llama $(n+1)$-conexo.
Ejemplo 38.3. a) $\mathbb{C}$ es un dominio simplemente conexo. b) Sea $r>0$ y $z_0\in\mathbb{C}$ fijo. Todo disco abierto $B(z_0,r)$ es un dominio simplemente conexo. Mientras que todo disco perforado $B^*(z_0,r) = \{z\in\mathbb{C}: 0<|z-z_0|<r\}$ es un dominio doblemente conexo. c) La región anular $\{z\in\mathbb{C} : 1<|z|<2\}$ es un dominio doblemente conexo.
En este punto es importante considerar los siguientes resultados de nuestros cursos de Cálculo.
Teorema 38.1. (Igualdad de las derivadas parciales cruzadas.) Si $U\subset\mathbb{R}^2$ es un conjunto abierto y $u: U \to \mathbb{R}$ es una función real de clase $C^2(U)$, entonces las derivadas parciales cruzadas son iguales, es decir: \begin{equation*} \frac{\partial^2 u}{\partial y \partial x} = \frac{\partial^2 u}{\partial x \partial y}. \end{equation*}
Teorema 38.2. (Regla de Leibniz o de diferenciación bajo el signo de integral.) Sean $[a,b], [c,d]\subset\mathbb{R}^2$, con $a<b$ y $c<d$, dos intervalos cerrados y $f:[a,b]\times[c,d]\to\mathbb{R}$ una función continua en $[a,b]\times[c,d]$. Entonces la función real $g:[a,b]\to\mathbb{R}$ dada por: \begin{equation*} g(x) = \int_{c}^{d} f(x,y) dy, \end{equation*}es continua en $[a,b]$. Más aún, si la derivada parcial $\dfrac{\partial f}{\partial x}$ existe y es continua en $[a,b]\times[c,d]$, entonces $g$ es diferencibale en $[a,b]$, con $g’$ continua y dada por: \begin{equation*} g'(x) = \frac{d}{dx} \int_{c}^{d} f(x,y) dy = \int_{c}^{d} \dfrac{\partial f}{\partial x}(x,y) dy. \end{equation*}
Observación 38.4.
A lo largo de esta cuarta unidad hemos trabajado con contornos para garantizar que las curvas a lo largo de las cuales integramos sean funciones continuas de clase $C^1$ o de clase $C^1$ a trozos. Sin embargo, notemos que en las definiciones 38.1, 38.2 y 38.3 solo se pidió que la función $H$, que determina a la homotopía, sea una función continua, pero no se estableció nada sobre su diferenciabilidad, por lo que las curvas $\gamma_s(t) = H(t,s)$, con $s\in[0,1]$, sobre las que se integra a una función compleja, no necesariamente tienen que ser de clase $C^1$ o de clase $C^1$ a trozos, sino que simplemente son funciones continuas, por lo que es importante considerar esta pequeña sutileza, ya que la prueba que daremos del siguiente resultado considerará este supuesto adicional sobre la diferenciabilidad de las curvas $\gamma_s$. Una prueba completa, sin este supuesto adicional, se escapa de los objetivos de estas notas, pero puede consultarse en los siguientes textos:
Complex Analysis de Ian Stewart, David Tall.
Functions of One Complex Variable I de John B. Conway.
Complex Analysis with Applications de Nakhlé H. Asmar, Loukas Grafakos.
Teorema 38.3. (Teorema integral de Cauchy, versión homotópica.) Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio, $f:D\to\mathbb{C}$ una función analítica en $D$ y $\gamma_0,\gamma_1:[a,b]\to D$ son dos contornos en $D$.
Si $\gamma_0$ y $\gamma_1$ son dos contornos que unen a $z_0, z_1 \in D$ y son homotópicas (con extremos fijos) en $D$, entonces: \begin{equation*} \int_{\gamma_0} f(z) dz = \int_{\gamma_1} f(z) dz. \end{equation*}
Si $\gamma_0$ y $\gamma_1$ son dos contornos cerrados y son homotópicas (como contornos cerrados) en $D$, entonces: \begin{equation*} \int_{\gamma_0} f(z) dz = \int_{\gamma_1} f(z) dz. \end{equation*}
Demostración. Dadas las hipótesis, sea $H:[a,b]\times [0,1] \to D$ una homotopía entre $\gamma_0$ y $\gamma_1$. Como se mencionó en la observación 38.4, adicionalmente suponemos que $H(t,s)$ es una función de clase $C^2([a,b]\times [0,1])$.
Para cada $s\in[0,1]$ fijo, definimos al contorno $\gamma_s(t):= H(t,s)$, para $t\in[a,b]$. Sea $I(s)$ la integral de $f$ a lo largo del contorno $\gamma_s$, es decir: \begin{align*} I(s): & =\int_{\gamma_s} f(z) dz\\ & =\int_{a}^{b} f(\gamma_s(t)) \gamma_s'(t)dt\\ & =\int_{a}^{b} f(H(t,s)) \frac{\partial H(t,s)}{\partial t}dt. \end{align*}
Veamos que $I(s)$ es una función constante, para ello determinamos su derivada. Por hipótesis sabemos que $f$ es una función analítica en $D$, en particular es continua en $D$ y como $H(t,s)$ es una función de clase $C^2$, en particular para cada $s\in[0,1]$, $\gamma_s(t)$ es un contorno en $D$, entonces $I(s)$ es una función bien definida y en particular continua en $[0,1]$, teorema 38.2.
Por la proposición 36.4 sabemos que $f\in C^{1}(D)$, ya que $f$ es analítica en $D$, por lo que $f’$ es una función continua en $D$ y para cada $s\in[0,1]$ fijo, el contorno $\gamma_s$ está completamente contenido en $D$, entonces, de la regla de la cadena y la regla de Leibniz, tenemos que: \begin{align*} I'(s) & = \frac{d}{ds} \int_{a}^{b} f(H(t,s)) \frac{\partial H(t,s)}{\partial t}dt\\ & = \int_{a}^{b} \frac{\partial}{\partial s} \left[f(H(t,s)) \frac{\partial H(t,s)}{\partial t}\right] dt\\ & = \int_{a}^{b} \left[f'(H(t,s)) \frac{\partial H(t,s)}{\partial s}\frac{\partial H(t,s)}{\partial t} + f(H(t,s)) \frac{\partial^2 H(t,s)}{\partial s \partial t}\right] dt. \tag{38.1} \end{align*}
Notemos que: \begin{equation*} \frac{\partial}{\partial t} \left[f(H(t,s)) \frac{\partial H(t,s)}{\partial s}\right] = f'(H(t,s)) \frac{\partial H(t,s)}{\partial s}\frac{\partial H(t,s)}{\partial t} + f(H(t,s)) \frac{\partial^2 H(t,s)}{\partial s \partial t}, \end{equation*}y como $H$ es de clase $C^2$, entonces por el teorema 38.1 se cumple que: \begin{equation*} \frac{\partial^2 H(t,s)}{\partial t \partial s} = \frac{\partial^2 H(t,s)}{\partial s \partial t}, \end{equation*}es decir: \begin{equation*} \frac{\partial}{\partial t} \left[f(H(t,s)) \frac{\partial H(t,s)}{\partial s}\right] = f'(H(t,s)) \frac{\partial H(t,s)}{\partial s}\frac{\partial H(t,s)}{\partial t} + f(H(t,s)) \frac{\partial^2 H(t,s)}{\partial t \partial s}. \tag{38.2} \end{equation*}
Entonces, de (38.1), (38.2) y la proposición 33.2, se sigue que: \begin{align*} I'(s) & = \int_{a}^{b} \left[f'(H(t,s)) \frac{\partial H(t,s)}{\partial s}\frac{\partial H(t,s)}{\partial t} + f(H(t,s)) \frac{\partial^2 H(t,s)}{\partial s \partial t}\right] dt\\ & = \int_{a}^{b} \frac{\partial}{\partial t} \left[f(H(t,s)) \frac{\partial H(t,s)}{\partial s}\right] dt\\ & = f(H(b,s)) \frac{\partial H(b,s)}{\partial s} – f(H(a,s)) \frac{\partial H(a,s)}{\partial s}. \tag{38.3} \end{align*}
De acuerdo con (38.3), tenemos lo siguiente.
Si $\gamma_0$ y $\gamma_1$ son dos contornos que unen a $z_0, z_1 \in D$ y $H$ es una homotopía (con extremos fijos) entre en $\gamma_0$ y $\gamma_1$, entonces: \begin{align*} I'(s) & = f(H(b,s)) \frac{\partial H(b,s)}{\partial s} – f(H(a,s)) \frac{\partial H(a,s)}{\partial s}\\ & = f(z_1) \frac{\partial z_1}{\partial s} – f(z_0) \frac{\partial z_0}{\partial s}\\ & = 0, \end{align*}para todo $s\in[0,1]$.
Por lo que, para todo $s\in[0,1]$ tenemos que $I(s)$ es una función constante, en particular tenemos que $I(0) = I(1)$, es decir: \begin{equation*} \int_{\gamma_0} f(z) dz = \int_{\gamma_1} f(z) dz. \end{equation*}
Si $\gamma_0$ y $\gamma_1$ son dos contornos cerrados y $H$ es una homotopía (como contornos cerrados) entre $\gamma_0$ y $\gamma_1$, entonces: \begin{align*} I'(s) & = f(H(b,s)) \frac{\partial H(b,s)}{\partial s} – f(H(a,s)) \frac{\partial H(a,s)}{\partial s}\\ & = f(H(b,s)) \frac{\partial H(b,s)}{\partial s} – f(H(b,s)) \frac{\partial H(b,s)}{\partial s}\\ & = 0, \end{align*}para todo $s\in[0,1]$.
Por lo que, para todo $s\in[0,1]$ tenemos que $I(s)$ es una función constante, en particular tenemos que $I(0) = I(1)$, es decir: \begin{equation*} \int_{\gamma_0} f(z) dz = \int_{\gamma_1} f(z) dz. \end{equation*}
$\blacksquare$
Corolario 38.1. Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio, $f:D\to\mathbb{C}$ una función analítica en $D$ y $\gamma:[a,b]\to D$ un contorno cerrado en $D$. Si $\gamma$ es homotópica a un punto en $D$, entonces: \begin{equation*} \int_{\gamma} f(z) dz = 0. \end{equation*}
Demostración. Dadas las hipótesis, como $\gamma$ es homotópica a un punto en $z_0\in D$, es decir, a una curva constante $\beta(t)=z_0$ para todo $t\in[a,b]$, entonces: \begin{equation*} \int_{\gamma} f(z) dz = \int_{\beta} f(z) dz =\int_{a}^{b} f(\beta(t)) \beta'(t) dt = \int_{a}^{b} f(z_0) (0) dt = 0. \end{equation*}
$\blacksquare$
El siguiente resultado generaliza el teorema integral de Cauchy para discos.
Corolario 38.2. Sean $D\subset\mathbb{C}$ un dominio simplemente conexo y $f:D\to\mathbb{C}$ una función analítica en $D$. Entonces: \begin{equation*} \int_{\gamma} f(z) dz = 0, \end{equation*} para todo contorno $\gamma$ cerrado en $D$.
Demostración. Dadas las hipótesis, consideremos al contorno cerrado $\gamma:[a,b]\subset\mathbb{R} \to D$, con $a<b$. Como el dominio $D$ es simplemente conexo, entonces al ser $\gamma$ un contorno cerrado en $D$, por definición es homotópica a un punto en $z_0\in D$, es decir, a una curva constante $\beta(t)=z_0$ para todo $t\in[a,b]$, entonces: \begin{equation*} \int_{\gamma} f(z) dz = \int_{\beta} f(z) dz =\int_{a}^{b} f(\beta(t)) \beta'(t) dt = \int_{a}^{b} f(z_0) (0) dt = 0. \end{equation*}
Como $\gamma$ es arbitraria, el resultado se cumple para todo contorno cerrado en $D$.
$\blacksquare$
Corolario 38.3. Sean $D\subset\mathbb{C}$ un dominio simplemente conexo y $f:D\to\mathbb{C}$ una función analítica en $D$. Las siguientes condiciones son equivalentes.
$f$ tiene una primitiva $F$ en $D$.
Si $\gamma_0$ y $\gamma_1$ son dos contornos en $D$ con los mismos puntos inicial y final, entonces: \begin{equation*} \int_{\gamma_0} f(z) dz = \int_{\gamma_1} f(z) dz. \end{equation*}
Demostración. El resultado se sigue del corolario 38.2 y la proposición 35.2.
$\blacksquare$
Observación 38.5. Notemos que la primitiva $F$ de la función $f$, en el corolario 38.3(1) es: \begin{equation*} F(z) = \int_{\gamma_z} f(\zeta) d\zeta, \end{equation*}donde $\gamma_z$ es el contorno en $D$ que une a un punto fijo $z_0 \in D$ con $z \in D$.
Ejemplo 38.4. Evaluemos la integral: \begin{equation*} \int_{C(0,2)} \frac{e^z}{z^2-9} dz, \end{equation*}donde la circunferencia $C(0,2)$ está orientada positivamente.
Solución. Parametrizamos a la circunferencia $C(0,2)$ como $\gamma(t)=2e^{it}$, para $t\in[0,2\pi]$.
Sea $f(z) = \dfrac{e^z}{z^2-9}$. Es claro que $f$ es analítica en $D=\mathbb{C}\setminus\{-3,3\}$. Dado que $C(0,2)\subset D$, entonces no pasa por los puntos donde $f$ no es analítica, por lo que, del ejemplo 38.2 concluimos que $\gamma$ es homotópica a $0 \in D$, figura 142, entonces: \begin{equation*} \int_{\gamma} \frac{e^z}{z^2-9} dz = 0. \end{equation*}
Figura 142: Homotopía del contorno cerrado $\gamma$ en el punto $0$, en el dominio $D$.
Proposición 38.1. (Extensión del teorema de Cauchy para dominios múltiplemente conexos.) Sean $C, C_1, C_2, \ldots, C_n$ contornos cerrados simples, orientados positivamente, tales que cada contorno $C_k$ está en el interior de $C$, para $k=1, \ldots, n$ y el interior de $C_k$ no tiene puntos en común con el interior de $C_j$, si $k\neq j$, es decir, $I(C_k) \cap I(C_j) = \emptyset$ para todo $k \neq j$. Sea $D\subset\mathbb{C}$ un dominio tal que $D$ contiene a todos los contornos y la región entre $C$ y $C_1 + C_2 + \ldots + C_n$. Si $f:D\to\mathbb{C}$ es una función analítica en $D$, entonces: \begin{equation*} \int_{C} f(z) dz = \sum_{k=1}^{n} \int_{C_k} f(z) dz. \end{equation*}
Demostración. Dadas las hipótesis, por simplicidad solo probaremos el caso para dos contornos cerrados simples, orientados positivamente. La prueba del caso general es completamente análoga y se deja como ejercicio al lector.
Nos apoyaremos en la figura 143 para la prueba. Debe ser claro que los contornos utilizados han sido elegidos para simplificar la gráfica, aunque el resultado sigue siendo válido para cualesquiera contornos que satisfagan las condiciones del resultado.
La prueba consiste en construir dos contornos disjuntos o cortes, digamos $L_1$ y $L_2$, que unen a $C_1$ con $C$. Así, el contorno $C_1$ será dividido en dos contornos $C_1^{*}$ y $C_1^{**}$, mientras que el contorno $C$ será dividido en dos contornos $C^{*}$ y $C^{**}$, como se muestra en la figura 144. Entonces tenemos dos nuevos contornos: \begin{equation*} K_1 = -C_1^{*}+L_1+C^{*}-L_2 \quad \text{y} \quad K_2 = -C_1^{**}+L_2+C^{**}-L_1. \end{equation*}
Figura 143: Dominio $D$ que contiene a los contornos cerrados simples $C$ y $C_1$ y a la región entre ellos.
Figura 144: Los cortes $L_1$ y $L_2$ y los contornos cerrados simples $K_1$ y $K_2$.
(a) El contorno $K_1$ y el dominio $D_1$.(b) El contorno $K_2$ y el dominio $D_2$.
Es claro que el dominio $D$ es doblemente conexo, mientras que los nuevos dominios $D_1$ y $D_2$ son simplemente conexos y los contornos $K_1$ y $K_2$ son cerrados simples, orientados positivamente y cada uno está contenido en los dominios $D_1$ y $D_2$. respectivamente. Por hipótesis la función $f$ es analítica en el dominio $D=D_1 \cup D_2$, por lo que $f|_{D_1}$ y $f|_{D_2}$ también son analíticas.
Proposición 38.2. (Extensión de la fórmula integral de Cauchy para dominios simplemente conexos.) Sean $D\subset\mathbb{C}$ un dominio simplemente conexo, $f:D\to\mathbb{C}$ una función analítica en $D$ y $C$ un contorno cerrado simple, orientado positivamente, tal que está completamente contenido en $D$. Si $z_0$ es un punto en el interior de $C$, entonces: \begin{equation*} f(z_0) = \frac{1}{2\pi i} \int_{C} \frac{f(z)}{z-z_0} dz. \end{equation*}
Demostración. Dadas las hipótesis, como $f$ es analítica en $D$, en particular es continua en $z_0\in D$ que está en el interior de $C$, por lo que dado $\varepsilon>0$ existe $\delta>0$ tal que si $|z-z_0|<\delta$, entonces $|f(z)-f(z_0)|<\varepsilon$.
Notemos que la circunferencia $\gamma$ dada por $C\left(z_0,\delta/2\right)$, orientada positivamente, también está en el interior de $C$.
Dado que $f(z_0)$ es un valor fijo, entonces por el ejemplo 34.1(a) tenemos que: \begin{equation*} f(z_0) = \frac{f(z_0)}{2\pi i} \int_{\gamma} \frac{1}{z-z_0} dz = \frac{1}{2\pi i} \int_{\gamma} \frac{f(z_0)}{z-z_0} dz. \end{equation*}
Por el corolario 38.3(2) tenemos que: \begin{equation*} \frac{1}{2\pi i} \int_{\gamma} \frac{f(z)}{z-z_0} dz = \frac{1}{2\pi i} \int_{C} \frac{f(z)}{z-z_0} dz. \end{equation*}
Ejemplo 38.5. Evaluemos la integral: \begin{equation*} \int_{\gamma} \frac{5z-2}{z^2-z} dz, \end{equation*}donde $\gamma$ es el contorno cerrado dado en la figura 145.
Solución. Sea $f(z)=\dfrac{5z-2}{z^2-z}$. Claramente $f$ es analítica en $D=\mathbb{C}\setminus\{0,1\}$, ya que en $z_1=0$ y en $z_2=-1$ el denominador de la función racional se anula. Si consideramos a dos circunferencias con centro en $z_1$ y $z_2$, de radio suficientemente pequeño para caer dentro del contorno $\gamma$ y las orientamos positivamente, entonces por la proposición 38.1 tenemos que: \begin{equation*} \int_{\gamma} f(z) dz = \int_{\gamma_1} f(z) dz + \int_{\gamma_2} f(z) dz. \end{equation*}
Figura 145: Contornos $\gamma$, $\gamma_1$ y $\gamma_2$ en $D$.
Ejemplo 38.6. Veamos que: \begin{equation*} \int_{\gamma} \frac{e^z}{z-1} dz = i 2\pi e, \end{equation*} donde $\gamma$ es la circunferencia $C(0,2)$ orientada positivamente.
Solución. Sea $f(z)=e^{z}$. Claramente $f$ es una función entera, $\gamma$ está completamente contenido en $\mathbb{C}$ y $z_0=1$ es un punto en el interior de $\gamma$, entonces por la fórmula integral de Cauchy tenemos que: \begin{equation*} e = f(1) = \frac{1}{2\pi i}\int_{\gamma} \frac{e^z}{z-1} dz, \end{equation*}de donde el resultado se sigue al multiplicar por $2\pi i$ la igualdad anterior.
Cerramos esta entrada mencionando algunos resultados relacionados con la versión homológica del teorema integral de Cauchy.
Definición 38.5. (Ciclo en $\mathbb{C}$.) A una sucesión finita de curvas cerradas suaves o suaves a trozos en $\mathbb{C}$, se le llama un ciclo y se le denota como $\sigma = (\gamma_1, \ldots, \gamma_n)$. En un ciclo no importa el orden de las curvas cerradas, es decir, un ciclo es una secuencia finita, no ordenada, de contornos cerrados en $\mathbb{C}$.
Ejemplo 38.7. Dado que $\sigma$ es una sucesión finita de contornos cerrados en $\mathbb{C}$, entonces un contorno cerrado es un ciclo.
Observación 38.6. Denotamos a la unión de las curvas que forman a un ciclo, es decir, al conjunto compacto: \begin{equation*} \gamma_1(I_1) \cup \gamma_2(I_2) \cup \cdots \cup \gamma_n(I_n), \end{equation*}como $|\sigma|$, donde $I_k$ es un intervalo real cerrado y $\gamma_k(I_k)$ la imagen o la curva de dicho intervalo bajo el contorno $\gamma_k$, para $1\leq k\leq n$. Entonces, diremos que un ciclo $\sigma$ está en un conjunto $S\subset\mathbb{C}$ si $|\sigma|\subset S$.
Definición 38.6. Sean $U\subset\mathbb{C}$ un conjunto abierto, $f:U\to\mathbb{C}$ una función continua en $U$ y $\sigma$ un ciclo en $U$. Se define a la integral de $f$ a lo largo del ciclo $\sigma$ como: \begin{equation*} \int_{\sigma} f(z) dz := \int_{\gamma_1} f(z) dz + \int_{\gamma_2} f(z) dz + \cdots + \int_{\gamma_n} f(z) dz. \end{equation*}
En particular, para $z\in \mathbb{C}\setminus|\sigma|$ se define el índice de $\sigma$ respecto a $z$, es decir, $n(\sigma,z)$, como: \begin{equation*} n(\sigma,z) = \frac{1}{2\pi i} \int_{\sigma} \frac{d\zeta}{\zeta-z}. \end{equation*}
Definición 38.7. (Ciclo homólogo a $0$.) Sean $U\subset\mathbb{C}$ un conjunto abierto y $\sigma$ un ciclo en $U$. Se dice que $\sigma$ es como homólogo a $0$ en $U$ si $n(\sigma,z)=0$ para todo $z \in \mathbb{C}\setminus U$.
Observación 38.7. Dado que para $z\in \mathbb{C}\setminus|\sigma|$ se cumple que $z\in \mathbb{C}\setminus\gamma_k(I_k)$, para cada contorno cerrado $\gamma_k$ que forma a $\sigma$, entonces: \begin{equation*} n(\sigma,z) = n(\gamma_1,z) + n(\gamma_2,z) + \cdots + n(\gamma_n,z). \end{equation*}
Antes de continuar con el resultado esperado, podemos preguntarnos sobre ¿cuál es la relación del concepto de homología con el de homotopía? Específicamente podemos preguntarnos si ¿existe una relación entre ser un contorno homotópico a un punto y un contorno homólogo a 0? Para responder a esto tenemos la siguiente:
Proposición 38.3. Sean $[a,b]\subset\mathbb{R}$, con $a<b$, un intervalo cerrado, $D\subset\mathbb{C}$ un dominio y $\gamma:[a,b]\to\mathbb{C}$ un contorno cerrado en $D$. Si $\gamma$ es homotópica a un punto $z_0 \in D$, entonces $\gamma$ es homólogica a $0$ en $D$.
Demostración. Dadas las hipótesis, como $\gamma$ es homotópica a un punto $z_0 \in D$, es decir, a una curva constante $\beta(t) = z_0$ para todo $t\in[a,b]$, entonces, del teorema 38.3 y la definición 36.1, se cumple que: \begin{equation*} n(\gamma, z) = \frac{1}{2\pi i} \int_{\gamma} \frac{d\zeta}{\zeta-z} = \frac{1}{2\pi i} \int_{\beta} \frac{d\zeta}{\zeta-z} = \int_{a}^{b} \frac{\beta'(t)}{\beta(t)-z} dt = 0, \end{equation*}para todo $z\in\mathbb{C}\setminus\gamma([a,b])$.
$\blacksquare$
Teorema 38.4. (Teorema integral de Cauchy, versión homológica.) Sean $U\subset\mathbb{C}$ un conjunto abierto, $f:U\to\mathbb{C}$ una función analítica en $U$ y $\sigma$ un ciclo en $U$. Entonces: \begin{equation*} \int_{\sigma} f(z) dz = 0, \end{equation*}si y solo si $\sigma$ es homólogo a $0$ en $U$.
Omitimos la prueba de este hecho, pero se puede consultar una prueba detallada en An Introduction to Complex Function Theory, de Bruce P. Palka, y una prueba parcial de este resultado en Notas para un curso de Variable Compleja I, de Oscar Palmas Velasco y Alberto Lazcano García.
Proposición 38.4. (Fórmula integral de Cauchy, versión homológica.) Sean $U\subset\mathbb{C}$ un conjunto abierto, $f:U\to\mathbb{C}$ una función analítica en $U$ y $\sigma$ un ciclo en $U$. Si $\sigma$ es homólogo a $0$ en $U$, entonces: \begin{equation*} n(\sigma,z)f(z) dz = \frac{1}{2\pi i} \int_{\sigma} \frac{f(\zeta)}{\zeta-z} d \zeta, \end{equation*}para todo $z\in U\setminus|\sigma|$.
Demostración. Dadas las hipótesis, fijamos un punto $z\in U\setminus|\sigma|$. Definimos a la función: \begin{equation*} g:U\to\mathbb{C}, \end{equation*}como: \begin{equation*} g(\zeta)= \left\{ \begin{array}{lcc} \dfrac{f(\zeta) – f(z)}{\zeta – z} & \text{si} & \zeta \neq z, \\ \\ f'(z) & \text{si} & \zeta = z, \end{array} \right. \end{equation*}donde $\zeta$ es una variable independiente.
Es claro que $g$ es una función analítica en $U\setminus\{z\}$. Más aún, como $f$ es analítica en $U$, entonces: \begin{equation*} \lim_{\zeta \to z} g(\zeta) = \lim_{\zeta \to z} \dfrac{f(\zeta) – f(z)}{\zeta – z} = f'(z) = g(z), \end{equation*}es decir, $g$ es continua en $z$, por lo que $g$ es continua en $U$, entonces, por el teorema de Morera generalizado, tenemos que $g$ es analítica en $U$.
Como $z$ no está en ninguno de los contorno cerrados $\gamma_k$, que conforman al ciclo $\sigma$, del teorema 38.4 y la definición 38.6, tenemos que: \begin{align*} 0 & = \int_{\sigma} g(\zeta) d\zeta\\ & = \int_{\sigma} \dfrac{f(\zeta) – f(z)}{\zeta – z} d\zeta\\ & = \int_{\sigma} \dfrac{f(\zeta)}{\zeta – z} d\zeta – \int_{\sigma} \dfrac{f(z)}{\zeta – z} d\zeta\\ & = \int_{\sigma} \dfrac{f(\zeta)}{\zeta – z} d\zeta – 2\pi i \, n(\sigma,z) f(z), \end{align*}es decir: \begin{equation*} n(\sigma,z) f(z) = \frac{1}{2\pi i}\int_{\sigma} \dfrac{f(\zeta)}{\zeta – z} d\zeta. \end{equation*}
Dado que $z\in U\setminus|\sigma|$ es arbitrario, entonces se tiene el resultado.
$\blacksquare$
Con los resultados previos podemos dar otra prueba del corolario 38.3.
Corolario 38.4. Sean $D\subset\mathbb{C}$ un dominio simplemente conexo y $f:D\to\mathbb{C}$ una función analítica en $D$. Entonces existe una primitiva de $f$ en $D$.
Demostración. Dadas las hipótesis, sea $\gamma$ un contorno cerrado en $D$. Como $D$ es simplemente conexo, $\gamma$ es homotópico a un punto $z_0 \in D$. Por la proposición 38.1 $\gamma$ es homólogo a $0$ en $D$ y por el teorema 38.4 se cumple que: \begin{equation*} \int_{\gamma} f(z) dz = 0. \tag{38.4} \end{equation*}
Dado que $\gamma$ es arbitraria, entonces (38.4) se cumple para todo contorno cerrado $\gamma$ en $D$. Por lo tanto, de la proposición 35.2 sabemos que esto es equivalente a que exista una primitiva de $f$ en $D$, es decir, una función analítica $F:D\to\mathbb{C}$ tal que $F'(z)=f(z)$ para todo $z\in D$.
$\blacksquare$
Teorema 38.5. Sean $D\subset\mathbb{C}$ un dominio. Si todo contorno cerrado en $D$ es homólogo a $0$, entonces $D$ es simplemente conexo.
Tarea moral
Sea $D\subset\mathbb{C}$ un dominio. Muestra que $\sim_{D}$ es una relación de equivalencia en el conjunto de contornos cerrados en $D$.
Sean $D=\mathbb{C}\setminus\{0\}$ y $\gamma : [-\pi/2, \pi/2] \to D$, el contorno dado por $\gamma(t)=e^{it}$. Define de manera explícita dos contornos poligonales $\beta_1$ y $\beta_2$ en $D$, que unan a $-i$ y $i$, tales que: \begin{equation*} \int_{\beta} f(z) dz = \int_{\gamma} f(z) dz \end{equation*}se cumple para toda función analítica $f$ en $D$, si $\beta = \beta_1$, pero la igualdad no se cumple si $\beta = \beta_2$.
Sean $r$ y $R$ dos constantes positivas tales que $0<r<R$. Define al contorno $\gamma_r(t) = re^{it}$, para $0\leq t \leq 2\pi$. Muestra que: \begin{equation*} \frac{1}{2\pi i} \int_{\gamma_r} \frac{R+z}{(R-z)z} dz = 1. \end{equation*}Considerando lo anterior deduce que: \begin{equation*} \frac{1}{2\pi} \int_{0}^{2\pi} \frac{R^2-r^2}{R^2+r^2-2rR\operatorname{cos}(t)} dt = 1. \end{equation*}
Si $\gamma$ es la circunferencia $C(i,1)$, orientada positivamente, muestra que: \begin{equation*} \int_{\gamma} \frac{2z}{z^2+2} dz = 2\pi i. \end{equation*}
Evalúa la integral: \begin{equation*} \int_{\gamma} \frac{1}{4z^2+4z-3} dz, \end{equation*}para los siguientes contornos orientados positivamente. a) $\gamma$ es la circunferencia $C(0,1)$. b) $\gamma$ es la circunferencia $C(-3/2,1)$. c) $\gamma$ es la circunferencia $C(0,3)$.
Sea $D = \{z\in\mathbb{C} : 1/2<|z|<4\}$. Determina explícitamente una homotopía $H(t,s)$ entre los contornos cerrados en $D$, orientados positivamente, dados por la elipse $\dfrac{x^2}{4}+\dfrac{y^2}{9}=1$, con punto inicial $(2,0)$ y la circunferencia unitaria $C(0,1)$, con punto inicial $(1,0)$, ambos recorridos una sola vez.
Sea $\gamma(t)=1+i+2e^{it}$, para $t\in[0,2\pi]$. Evalúa las siguientes integrales. a) $ \displaystyle\int_{\gamma} \frac{1}{z-1} dz$. b) $ \displaystyle\int_{\gamma} \frac{1}{(z-3i)(z-1)} dz$. c) $ \displaystyle\int_{\gamma} \frac{1}{z^2+9} dz$. d) $ \displaystyle\int_{\gamma} \frac{1}{(z-i)(z+i)} dz$.
Muestra que: \begin{equation*} \int_{\gamma} \frac{\operatorname{sen}(z)}{4z+\pi} dz = -\frac{\sqrt{2} \pi i}{4}, \end{equation*}donde $\gamma$ es la circunferencia unitaria $C(0,1)$, orientada positivamente.
Más adelante…
En esta entrada hemos generalizado el teorema integral de Cauchy para dominios más generales que un disco abierto, para ello recurrimos a los conceptos topológicos de homotopía y homología. Además extendimos dicho resultado para dominios múltiplemente conexos, lo cual es de mucha utilidad al evaluar integrales.
En la siguiente entrada veremos algunos resultados muy importantes que relacionan los conceptos de diferenciabilidad e integrabilidad con las sucesiones y series de funciones complejas.