(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
INTRODUCCIÓN
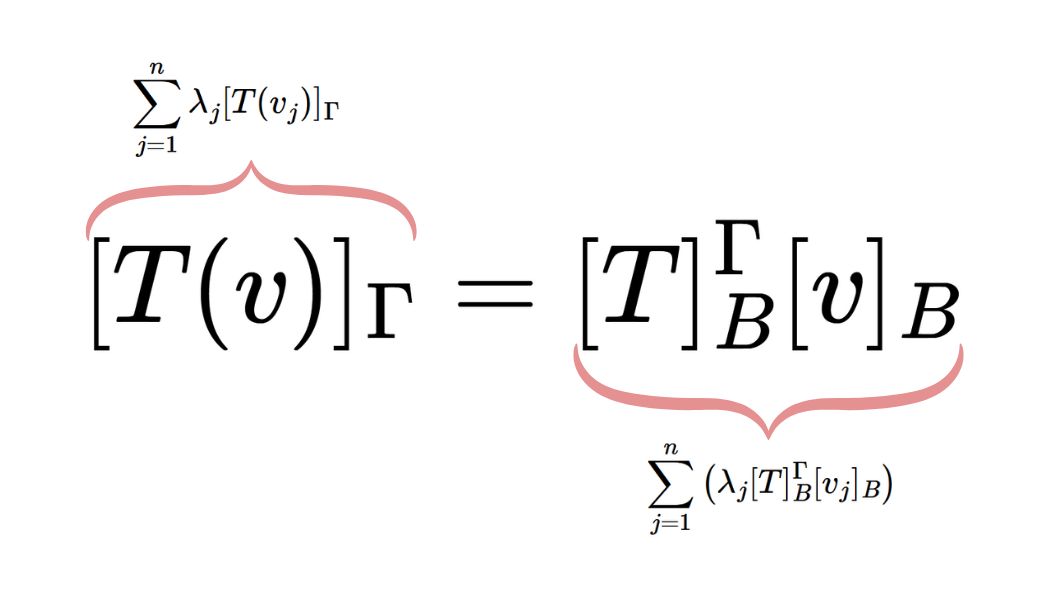
Sabemos que toda transformación lineal entre espacios vectoriales de dimensión finita puede describirse mediante una matriz, siempre que fijemos bases en el dominio y el codominio. Lo verdaderamente valioso es que esta relación no solo asigna una matriz a cada transformación lineal, sino que establece una biyección entre ambas nociones. Esto significa que no hay pérdida de información al pasar de una descripción a la otra; cada transformación lineal tiene una única matriz asociada y cada matriz representa exactamente una transformación lineal. En otras palabras, estamos ante dos “lenguajes” distintos capaces de expresar la misma estructura.
Además, esta biyección respeta la estructura del espacio vectorial: suma de transformaciones corresponde a suma de matrices, y la multiplicación por escalares también se conserva. Así, podemos movernos libremente entre el enfoque geométrico y el algebraico según lo necesitemos. A partir de este punto, trabajar con transformaciones lineales o con matrices es, en esencia, trabajar con la misma entidad expresada desde dos perspectivas totalmente equivalentes.
Ejemplos
- Sean $K=\mathbb{R}$, $V=\{ ax+bx^2+cx^3 | a,b,c \in \mathbb{R} \}$ y $W=\{ d+ex+fx^2 | d,e,f \in \mathbb{R} \}$.
Sean $B = (x,x^2,x^3)$ y $\Gamma = (1,x,x^2)$.
Sean $T,S \in \mathcal{L}(V,W)$ con $T(ax+bx^2+cx^3)=a+2bx+3cx^2$ y $S(ax+bx^2+cx^3)=(2a+b)+3bx-cx^2$
$[ 3T+S ]_{B}^{\Gamma} = 3 [ T ]_{B}^{\Gamma} +[ S ]_{B}^{\Gamma}$
Justificación.
Por un lado, $(3T+S) \left( ax+bx^2+cx^3 \right) = 3T(ax+bx^2+cx^3)+S(ax+bx^2+cx^3)$ $=3[a+2bx+3cx^2]+ \left[ (2a+b)+3bx-cx^2 \right]$ $=(5a+b)+9bx+8cx^2$.
De donde $[ 3T+S ]_{B}^{\Gamma} = \begin{pmatrix} 5 & 1 & 0 \\ 0 & 9 & 0 \\ 0 & 0 & 8 \end{pmatrix}$.
Por otro lado $[ T]_{B}^{\Gamma} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 3 \end{pmatrix}$ y $[ S ]_{B}^{\Gamma} = \begin{pmatrix} 2 & 1 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & -1 \end{pmatrix}$
De donde $3[ T ]_{B}^{\Gamma} + [ S]_{B}^{\Gamma} = 3 \begin{pmatrix} 1 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 3 \end{pmatrix} + \begin{pmatrix} 2 & 1 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & -1 \end{pmatrix} = \begin{pmatrix} 5 & 1 & 0 \\ 0 & 9 & 0 \\ 0 & 0 & 8 \end{pmatrix}$.
Veamos ahora que lo que ocurrió en el ejemplo anterior no es casualidad, probemos que el asignarle a una transformación lineal su matriz asociada se comporta bien con las operaciones de suma y producto por escalar:
Proposición (3.4.1.): Sean $V,W$ $K$ – espacios vectoriales de dimensión finita, $B, \Gamma$ bases ordenadas de $V$ y $W$ respectivamente, $T,S \in \mathcal{L}(V,W)$ y $\lambda \in K$.
Se cumple que $[ \lambda S + T ]_{B}^{\Gamma}$ $= \lambda [ S ]_{B}^{\Gamma} + [ T ]_{B}^{\Gamma}$.
Demostración: Sean $n$ la dimensión de $V$, $B= ( v_1, …, v_n )$ y $j \in \{ 1, …, n \}$.
$\begin{align*}
col_j [ \lambda S + T]_{B}^{\Gamma} &= [ (\lambda S + T)(v_j) ]_{\Gamma} \tag{Def. de suma y producto}\\
&= [ \lambda S(v_j) + T(v_j) ]_{\Gamma}\tag{Obs. entrada 3.1}\\
&= \lambda [ S(v_j) ]_{\Gamma} + [ T(v_j) ]_{\Gamma} \tag{Def. de matriz asociada}\\
&= \lambda col_j[ S ]_{B}^{\Gamma} + col_j [ T ]_{B}^{\Gamma} \tag{Suma de matrices}\\
&= col_j \left( \lambda [ S ]_{B}^{\Gamma} +[T ]_{B}^{\Gamma} \right) \tag{}\\
\end{align*}$
$\therefore col_j [\lambda S + T ]_{B}^{\Gamma} = col_j \left( \lambda [S ]_{B}^{\Gamma} + [ T ]_{B}^{\Gamma} \right)$
Al tratarse de una columna aleatoria, concluimos que todas las columnas de $[ \lambda S + T ]_{B}^{\Gamma}$ y $\lambda [ S ]_{B}^{\Gamma} + [ T ]_{B}^{\Gamma}$ son iguales y con ello, las matrices son idénticas.
Por lo tanto $[\lambda S + T ]_{B}^{\Gamma} = \lambda [ S ]_{B}^{\Gamma} + [ T]_{B}^{\Gamma}$.
Veamos ahora que la matriz asociada a una transformación lineal determina por completo a la transformación:
Proposición (3.4.2.): Sean $V,W$ $K$ – espacios vectoriales de dimensión finita, $B$ y $\Gamma$ bases ordenadas de $V$ y $W$ respectivamente, $T,S \in \mathcal{L}(V,W)$.
Si $[T ]_{B}^{\Gamma} = [ S ]_{B}^{\Gamma}$ entonces $T=S$.
Demostración: Supongamos que $[T ]_{B}^{\Gamma} =[ S ]_{B}^{\Gamma}$
Sean $n$ y $m$ las dimensiones de $V$ y $W$ respectivamente, $B= ( v_1, …, v_n )$ y $\Gamma = ( w_1, …, w_m )$.
Sea $j \in \{ 1,…,n \}$.
Debido a que $\Gamma$ es una base de $W$, existen $\lambda_{1j}, …, \lambda_{mj} \in K$ tales que $T(v_j) =\lambda_{1j}w_1 + … + \lambda_{mj}w_m$. Entonces,
$\begin{align*}
\begin{pmatrix} \lambda_{1j} \\ \vdots \\ \lambda_{mj} \end{pmatrix}&=[ T(v_j) ]_{\Gamma} \tag{}\\
&= col_j [T]_{B}^{\Gamma} \tag{}\\
&= col_j [ S ]_{B}^{\Gamma} \tag{$[ T]_{B}^{\Gamma} =[S ]_{B}^{\Gamma}$}\\
&= [ S(v_j) ]_{\Gamma} \tag{}\\
\therefore \begin{pmatrix} \lambda_{1j} \\ \vdots \\ \lambda_{mj} \end{pmatrix}&=[ S(v_j)]_{\Gamma}
\end{align*}$
Por lo tanto, $S(v_j) =\lambda_{1j}w_1 + … + \lambda_{mj}w_m = T(v_j)$.
Como se cumple para toda $j \in \{ 1, …, n \}$, entonces $T$ y $S$ coinciden al evaluarse en los elementos de una base y por el corolario 2.4.2 de la entrada 2.4 esto nos permite concluir que $T=S$.
Ejemplos
- Sean $K = \mathbb{R}$ y $V=W= \mathbb{R}^3$.
Sean $\mathcal{C} = (e_1, e_2, e_3)$ la base canónica de $V$ y $\Gamma = ((1,0,1), (1,1,0), (0,1,1))$ una base de $W$.
Sean $T,S \in \mathcal{L}(V,W)$ tales que $[ T ]_{\mathcal{C}}^{\Gamma} =[ S ]_{\mathcal{C}}^{\Gamma} = \begin{pmatrix} 2 & 0 & 4 \\ 1 & -1 & 1 \\ 8 & 1 & 1 \end{pmatrix}$.
Entonces $T(x,y,z)=S(x,y,z)=(3x-y+5z, 9x+2z, 10x+y+5z)$
Justificación.
$T(e_1) = S(e_1) = 2(1,0,1) + 1(1,1,0) + 8(0,1,1) = (3,9,10)$
$T(e_2) = S(e_2) = 0(1,0,1) – 1(1,1,0) + 1(0,1,1) = (-1,0,1)$
$T(e_3) = S(e_3) = 4(1,0,1) + 1(1,1,0)+ 1(0,1,1) = (5,2,5)$
Tenemos que $T(x,y,z) = T(xe_1 + ye_2 + ze_3)$ $= xT(e_1) + yT(e_2) + zT(e_3)$$=xS(e_1) + yS(e_2) + zS(e_3)$ $=S(xe_1 + ye_2 + ze_3)$ $=S(x,y,z)$.
Y como $xT(e_1) + yT(e_2) + zT(e_3)$ $= x(3,9,10) + y(-1,0,1) + z(5,2,5)$ $=(3x-y+5z,9x+2z,10x+y+5z)$, entonces $T(x,y,z)=S(x,y,z)=(3x-y+5z,9x+2z,10x+y+5z)$.
Tarea Moral
- Sean $V$ un $K$ – espacio vectorial de dimensión dos y $S, T \in \mathcal{L}(V,V)$.
Sea $\Gamma$ base ordenada de $V$.
Dadas $M_1 , M_2 \in \mathcal{M}_{2 \times 2}(\mathbb{R})$ y $\alpha_1 , \alpha_2 , \beta_1 , \beta_2 \in \mathbb{R}$, si se tiene que:
$\begin{cases}
[ \alpha_1 S + \beta_1 T ]_{\Gamma} = M_1\\
[ \beta_2 S + \beta_2 T]_{\Gamma} = M_2\\
\end{cases}$
¿Cómo crearías un sistema de ecuaciones para obtener $S$ y $T$?
¿Lo puedes adaptar para tres transformaciones si tuvieras tres ecuaciones matriciales inicialmente bien definidas? ¿Sería necesario ajustar en ese caso la dimensión de $V$? Justifica tus respuestas. - ¿Qué te dice el hecho de que una misma transformación tenga distintas matrices según la base? ¿Eso cambia la esencia de la transformación? ¿Por qué sí o por qué no?
Para responder, reflexiona en lo siguiente:
Imagina que en un plano cartesiano estás parado con el Eje X (lado positivo), y un amigo está en el Eje Y (lado negativo) viendo simultánemante a un triángulo rotar. Sus descripciones en coordenadas serán diferentes, porque sus ejes son distintos… ¿eso significa que vieron distintas rotaciones?
Más adelante…
Veremos un resultado que junto con los dos de esta entrada darán lugar a un isomorfismo que quizás a algunos sorpenda y otros hayan visto venir… No por nada intervienen en él dos espacios vectoriales que hemos mencionado una y otra vez de modo tal que hemos tenido que recalcar que uno consiste de las representaciones de los elementos del otro. ¿Cuáles dos espacios crees que sean?
Entradas relacionadas
- Ir a Álgebra Lineal I
- Entrada anterior del curso: 3.3. MATRICES DE UNA TRANSFORMACIÓN Y VECTORES DE COORDENADAS: relación entre sí
- Siguiente entrada del curso: 3.5. MATRICES Y TRANSFORMACIONES LINEALES: isomorfismo, ejemplos y propiedades