(Trabajo de titulación asesorado por la Dra. Diana Avella Alaminos)
Introducción
En la entrada anterior aprendimos que el Teorema de Cayley es muy útil porque nos permite visualizar a un grupo $G$ como un subgrupo del grupo de permutaciones. Si el grupo es de orden $n$, se puede visualizar como un subgrupo del grupo $S_n$ que tiene orden $n!$, entonces hemos visualizado a $G$ como parte de un grupo de permutaciones $S_n$ que es realmente mucho más grande que $G$. Lo que haremos en esta entrada es relacionar al grupo $G$ con un grupo simétrico pero más pequeño que $S_n$. Utilizaremos los elementos de $G$ no para mover sus propios elementos, si no, para mover clases laterales.
Después de probar este resultado, veremos una aplicación de esta modificación del Teorema de Cayley para trabajar con clase laterales. Esta aplicación generaliza el resultado que se probó para grupos normales, anteriormente establecimos que todo subgrupo de índice 2 es un subgrupo normal. Probaremos que si tomamos el menor primo que divide al orden de un grupo y tenemos un subgrupo ese índice, entonces este subgrupo tiene que ser normal.
Relacionemos a $G$ con un grupo simétrico más pequeño
En el siguiente teorema relaciona a $G$ con un grupo simétrico, pero en este caso $n$ no es el orden de $G$, si no el índice de $G$ con respecto a un subgrupo $H$.
Teorema. Sean $G$ un grupo, $H$ subgrupo de $G$ de índice finito, $[ G:H ] = n.$ Entonces, existe un homomorfismo $\phi: G \to S_n$ con $\text{Núc }\phi \leq H$.
Observemos que el Teorema de Cayley nos da un isomorfismo y este teorema sólo nos da un homomorfismo (no necesariamente inyectivo). De todas maneras, se puede usar este teorema para probar otros resultados.
Demostración. Sean $G$ un grupo, $H\leq G$ de índice finito, digamos $[ G:H ] = n$. Para cada $a \in G$ definimos $\tau_a : G/H \to G/H$ con $\tau_a(gH) = agH$ para toda $g\in G$.
Para esta demostración, como $H$ no es necesariamente normal, $G/N$ no es un grupo. Sólo lo estamos pensando como la colección de todas las clases laterales de $G$ con respecto a $H$.
Dada $g\in G$. Se tiene que \begin{align*} \tau_a \circ \tau_{a^{-1}} (gH) &= \tau_a(\tau_{a^{-1}}(gH)) = a(a^{-1}g)H = gH\\ \tau_{a^{-1}} \circ \tau_a (gH)&= \tau_{a^{-1}} (\tau_a(gH)) = a^{-1}(ag)H = gH. \end{align*}
Así, $\tau_{a^{-1}}$ es la inversa de $\tau_a$ y $\tau_a$ es biyectiva.
Definimos entonces $\psi: G \to S_{G/H}$ con $\psi(a) = \tau_a$ para todo $a\in G$. Tomemos $a,b\in G$ y $g\in G$. A continuación demostraremos que $\psi$ es un homomorfismo: \begin{align*} \psi(ab) (gH) &= \tau_{ab}(gH) \\ &= (ab)gH \\ &= a(bg)H \\ &= \tau_a(\tau_b(gH))\\ &= \tau_a \circ \tau_b(gH) = \psi (a) \circ \psi(b) (gH). \end{align*}
Observemos que las igualdades son producto exclusivamente de las definiciones de $\psi$ y de $\tau_a$. Así, $\psi(ab) = \psi(a)\circ\psi(b)$ para todo $a,b\in G$. Por lo que $\psi$ es un homomorfismo.
Ahora pasemos a la segunda parte del teorema.
Si $a\in\text{Núc }\psi$, $\psi(a) = \text{id}_{G/N}$ y entonces, para todo $g\in G$ obtenemos, \begin{align*} \psi(a)(gH) = gH &\Rightarrow \tau_a(gH) = gH & \text{definición de }\psi\\ &\Rightarrow agH= gH & \text{pues } \psi(a) = \text{id}_{G/N} \\ &\Rightarrow aH = H &\text{en particular, cuando } g=e\\ &\Rightarrow a \in H. \end{align*}
Por lo tanto $\text{Núc }\psi \leq H$.
Como $\#G/N = n$, sabemos que $S_{G/N}\cong S_n$ y existe $\rho: S_{G/H}\to S_n$ un isomorfismo. Así $\rho\circ\psi: G\to S_n$ es el homomorfismo buscado.
$\blacksquare$
Observación. Si $H = \{e\}$ se tiene el Teorema de Cayley.
Ilustremos lo aprendido
Veamos un ejemplo.
Ejemplo. Tomemos el grupo simétrico $G = S_3$, el subgrupo $H = \left<(1,2)\right>$ y el cociente $G/H = \{H, (1\;3)H, (2\;3)H\}$.
Retomemos la función de la demostración: $\psi: S_3 \to S_{G/H}$, $\psi(a) = \tau_a$ para toda $a \in S_3$. Entonces,
Así, en este caso si $a\in \text{Núc }\psi$, \begin{align*} a(1\;3)H = (1\;3)H &\Rightarrow (1\;3) a (1\;3) \in H = \{(1), (1\;2)\}. \end{align*} Recordemos que dos clases laterales $aH, bH$ son iguales si y sólo si $b^{-1}ab\in H$. En este caso, el inverso de $(1\;3)$ es él mismo. \begin{align*} &\Rightarrow a = (1) \text{ o } a = (1\; 3) (1\; 2)(1\;3) = (3\;2). \end{align*}
Sin embargo, como $a\in\text{Núc }\psi$, no sólo deja fijo a $(1\;3)$, si no también a $(2\;3)$, siguiendo un razonamiento similar obtenemos: \begin{align*} a(2\;3)H = (2\; 3)H &\Rightarrow (2\; 3)a(2\; 3) \in H = \{(1), (1\;2)\}\\ &\Rightarrow a = (1) \text{ o } a = (2\; 3) (1\; 2) (2\; 3) = (1\; 3). \end{align*}
Entonces, por un lado tenemos que $a = (1) \text{ o } a = (3\;2)$ y por el otro, tenemos que $a = (1) \text{ o } a = (1\; 3)$. Así, $a = (1)$.
Por lo tanto, $\text{Núc }\psi = \{(1)\}\leq H.$
Aplicación de la modificación
A continuación veremos la aplicación de la modificación del Teorema de Cayley que mencionamos en la introducción. La aplicación consiste en una generalización de un resultado visto previamente. En entradas anteriores, vimos que todo subgrupo de índice 2 es un subgrupo normal. Ahora veremos que si hay un subgrupo de orden el menor primo que divide al orden de un grupo, este subgrupo será normal.
Corolario. Si $G$ es un grupo finito y $p\in \z^+$ es el menor primo positivo que divide al orden de $G$, entonces todo subgrupo de $G$ de índice $p$ es normal en $G$.
Demostración. Sea $G$ un grupo finito, $|G|= n$, $p\in\z^+$ el menor primo positivo que divide a $n$.
Supongamos que $H\leq G$ con $[ G:H ] = p$. Probaremos que $H$ es normal.
Sea $\psi:G\to S_{G/H}$ con $\psi(a) = \tau_a$ para toda $a\in G$ como en el teorema anterior. Sabemos que $\text{Núc } \psi \leq H \leq G$, como secuencia del Teorema de Lagrange tenemos \begin{align} \label{eq:orden} [ G: \text{Núc }\psi] = [ G:H ] [ H: \text{Núc }\psi ] = p [ H:\text{Núc } \psi]. \end{align}
Por el Primer Teorema de Isomorfía, $$G/\text{Núc }\psi\cong \text{Im }\psi \leq S_{G/H}\cong S_p,$$
Si $[ H: \text{Núc }\psi ] > 1$, existiría $q\in\z^+$ un primo que lo divide, entonces $q\Big| a$ con $a \in \{1,2,\dots,p-1\}$. Por lo tanto $q<p.$
Pero, por el Teorema de Lagrange, $$|G| = [ G:\text{Núc }\psi ] |\text{Núc }\psi| = [ G:H] [ H: \text{Núc }\psi] |\text{Núc }\psi|.$$ Entonces $[ H: \text{Núc }\psi] \Big| |G|.$
Y como $q| [ H : \text{Núc }\psi ]$, entonces $q\Big||G|$.
Entonces, $q$ sería un divisor primo positivo de $n$, menor que $p$. Esto es una contradicción.
Así $[ H: \text{Núc }\psi ] = 1$, de donde $|H| = |\text{Núc }\psi|$ y como $ \text{Núc }\psi \leq H$ concluimos que $H = \text{Núc }\psi \unlhd G.$
Por lo tanto $H\unlhd G$.
$\blacksquare$
Observación. No siempre existe dicho subgrupo, por ejemplo $A_4$ no tiene subgrupos de índice 2.
Esto sucede porque $A_4$ tiene 12 elementos, el menor primo que divide a 12 es 2. Pero, de acuerdo a lo que estudiamos, $A_4$ no tiene subgrupos de orden 6, entonces no existen subgrupos de índice 2.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Demuestra la observación: Si $H = \{e\}$ se tiene el Teorema de Cayley.
Sea $V$ el grupo de Klein. $H = \left< (1,0) \right>$. Determina cómo son las funciones $\tau_a$ para cada $a\in V$ y describe cómo se puede visualizar a cada elemento $a\in V$ como una permutación en $\{(a,b) + H\,|\, (a,b) \in V \}$, y como una permutación en $S_2$.
Dado $G$ un grupo y $H$ un subgrupo de $G$ de índice finito $n$, sabemos que existe un homomorfismo $\phi$ de $G$ en $S_n$ con $\text{Núc }\phi \leq H.$ Da una condición necesaria y suficiente para que $\text{Núc }\phi = H.$
Sean $G$ un grupo finito de orden $n$ y $H$ un subgrupo de de índice primo $p$. ¿Es $H$ normal en $G$? Prueba o da un contraejemplo.
Más adelante…
Con este teorema hemos avanzado un pasito en la idea de usar elementos de un grupo para modificar otro, ahora usando clases laterales. El Teorema de Cayley y su modificación son importantes para el tema que veremos en la siguiente entrada, donde ahora sí, usaremos un grupo cualquiera para actuar sobre otro grupo cualquiera.
Sabemos que la gráfica de una función de $\mathbb{R}^2$ a $\mathbb{R}^2$ es un subconjunto de $\mathbb{R}^4$, por lo que si quisiéramos visualizar la gráfica de una función compleja de variable compleja, como hacíamos usualmente con funciones cuyas gráficas tenían lugar en $\mathbb{R}^2$ o en $\mathbb{R}^3$, nos será imposible.
Al trabajar en Cálculo con integrales dobles era de nuestro interés saber cómo se transformaban ciertas regiones $A\subset\mathbb{R}^2$ del plano, bajo ciertas transformaciones $T:\mathbb{R}^2 \to \mathbb{R}^2$ para poder entender de manera geométrica lo que sucedía al aplicar un cambio de variable con nuestras regiones de integración.
Una primera alternativa para poder estudiar la geometría de las funciones complejas, es analizar su comportamiento gráfico siguiendo esta idea de las transformaciones entre planos. Por lo que, resultará conveniente considerar a las funciones complejas como transformaciones del plano complejo, es decir, para darnos una idea de lo que hacen estas funciones las veremos como mapeos o transformaciones de un subconjunto de $\mathbb{C}$ en un plano $z$, que toman valores en un plano $w$. Si escribimos a $z=x+iy\in\mathbb{C}$ y a $w=u+iv\in\mathbb{C}$, tendremos al plano $z$ asociado con los ejes $x$ y $y$, mientras que para el plano $w$ se tienen los ejes $u$ y $v$, los cuales, en ambos casos, corresponden con los ejes real e imaginario, respectivamente.
Observación 26.1. Debemos tener presente que esta alternativa no es la única forma para dar una interpretación del comportamiento geométrico de una función compleja, ya que también puede representarse a las funciones complejas mediante:
las gráficas de su parte real e imaginaria,
las gráficas del módulo complejo de la función,
superficies de Riemann.
Se puede consultar un poco sobre estás técnicas en las siguientes ligas:
Sin embargo, para los fines del curso bastará con esta alternativa de pensar a las funciones como transformaciones del plano en el plano.
Para plantear lo anterior consideremos la siguiente:
Definición 26.1. Sea $S\subset\mathbb{C}$, se define a la imagen de $S$ bajo una función $f$, denotada por $f(S)$, como el conjunto: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \,:\, w = f(z),\, z\in S\right\}. \end{equation*}
Analicemos los siguientes ejemplos para comprender mejor esta idea de las transformaciones complejas.
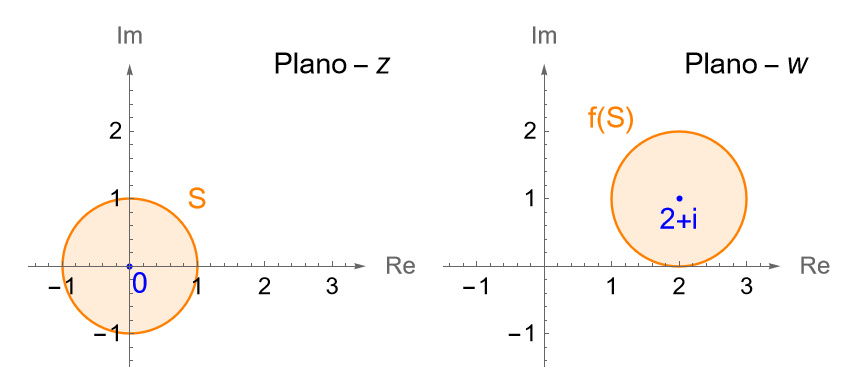
Ejemplo 26.1. Sea $S$ el disco unitario, es decir $S=\overline{B}(0,1)$. Determinemos la imagen de $S$ bajo la transformación $f(z) = z+2+i$.
Solución. Notemos que para cada $z\in S$ el valor de $w=f(z)$ está dado por la suma de $2+i$ al valor de $z$. Considerando a $z=x+iy$, tenemos que: \begin{equation*} w = f(z) = (x+2) + i(y+1), \end{equation*} por lo que la función $f$ transforma los puntos $(x,y)$ en los puntos $(u,v)$, donde $u=x+2$ y $v=y+1$. Es claro que $f$ simplemente traslada a cada elemento del disco unitario $S$ dos unidades a la derecha y una unidad hacia arriba, figura 98, es decir: \begin{align*} f(S) & = \{ w\in\mathbb{C} \,:\, |\,w-(2+i)\,|\leq 1 \}\\ & = \overline{B}(2+i,1). \end{align*}
Figura 98: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Esta transformación de la forma $f(z)=z+b$, con $b\in\mathbb{C}$ constante, nos determina una traslación. Consideremos ahora transformaciones de la forma $f(z) = az$, con $a\in\mathbb{C}\setminus\{0\}$. Veamos que dichas transformaciones nos determinan rotaciones y homotecias en el plano complejo.
Observación 26.2. Recordemos que al multiplicar a los números complejos $a=\rho\operatorname{cis}(\alpha)\neq 0$ y $z = r \operatorname{cis}(\theta)$ tenemos: \begin{equation*} az = r\rho \operatorname{cis}(\alpha + \theta) = r \rho e^{i(\alpha + \theta)}, \end{equation*} de donde es claro que la transformación $f(z) = az$ nos devuelve una homotecia desde que al módulo de $z$ se le multiplica por una constante $\rho>0$. Por otra parte, notemos que tenemos una rotación del número complejo $z$ desde que a su argumento $\theta$ se le suma el argumento $\alpha$. Además, dado que el producto de números complejos es conmutativo, es claro que la homotecia y rotación que se le aplica a cada número complejo $z$ se puede realizar en cualquier orden. Notemos que tenemos los siguientes casos:
Si $a = \rho >0$, entonces tenemos que la transformación $f(z) = az$ es simplemente una homotecia por un factor $a$.
Si $\rho = 1$, entonces tenemos que la transformación $f(z) = az = e^{i\alpha} z$ es simplemente una rotación por un ángulo $\alpha$.
Si $\rho>0$, entonces tenemos que la transformación $f(z) = az = \rho e^{i\alpha} z$ es una homotecia por un factor $\rho$ seguida de una rotación por un ángulo $\alpha$.
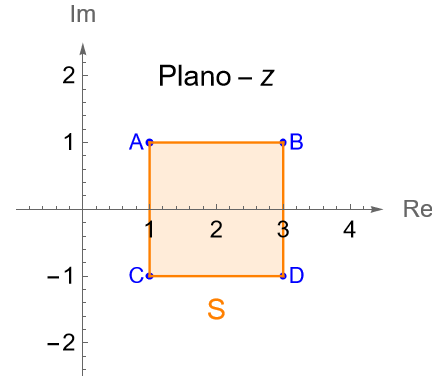
Ejemplo 26.2. Sea $S$ el cuadrado cerrado con centro en el punto $z=2$, cuyos lados son paralelos a los ejes real e imaginario y tienen una longitud $2$, figura 99.
a) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=3z$? b) ¿Cuál es la imagen de $S$ bajo la transformación $f(z)=2iz$?
Figura 99: Gráfica del conjunto $S$ en el plano $z$.Gráfica del conjunto $S$ en el plano $z$.
Solución.
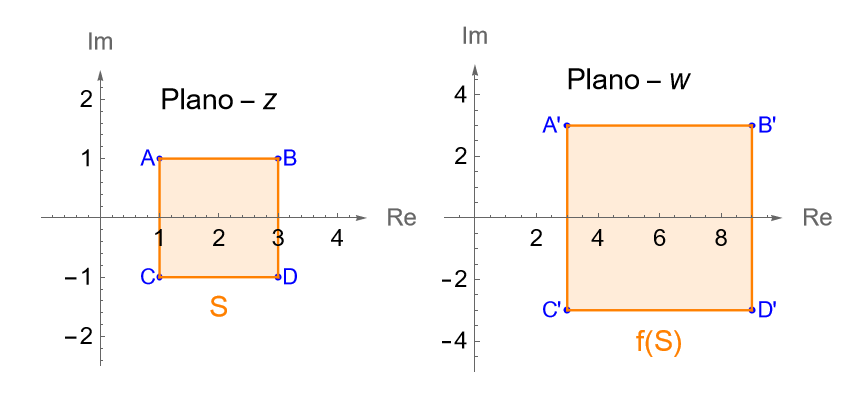
a) De acuerdo con la observación 26.2 tenemos que $a=3>0$ es una constante, por lo que la transformación $f(z)=3z$ corresponde con una homotecia, ya que bajo $f$ la distancia de cada número complejo $w=f(z)$, medida desde el origen, será tres veces la distancia de cada $z\in S$, medida desde el origen, es decir, el módulo de cada número complejo $z\in S$ será triplicado, mientras que su argumento permanecerá sin cambios. Entonces la imagen de $S$ bajo la transformación $f$, es decir, $f(S)$ será otro cuadrado cuyos vértices corresponden con las imágenes de los vértices del cuadrado $S$, figura 100.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 6,\\ f(A) = 3+3i,\\ f(B) = 9+3i,\\ f(C) = 3-3i,\\ f(D) = 9-3i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=6$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 6.
Figura 100: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
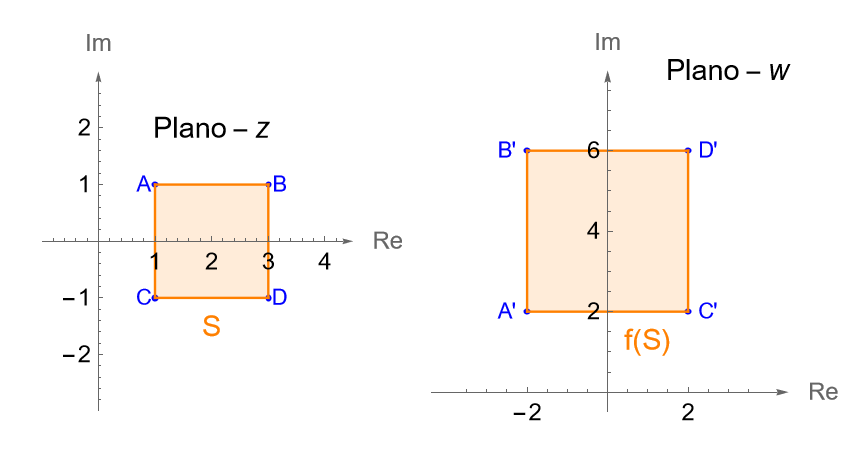
b) Considerando la observación 26.2, tenemos que $a=2i$ es un número complejo cuyo módulo es $r=2$ y su argumento principal es $\alpha = \frac{\pi}{2}$, por lo que la transformación $f(z)=2iz$ corresponde con una homotecia por un factor $r=2$ seguida de una rotación por un ángulo $\alpha=\frac{\pi}{2}$, en sentido contrario a las manecillas del reloj. Entonces, bajo $f$ a cada punto $z\in S$ se le duplicará su módulo y se le sumará $\frac{\pi}{2}$ a su argumento, entonces $f(S)$ será nuevamente un cuadrado cerrado para el cual la distancia del origen a cada $w=f(z)$ será dos veces la distancia del origen a cada $z\in S$ y sus vértices serán las imágenes de los vértices del cuadrado $S$ bajo $f$, figura 101.
Tenemos que el centro del cuadrado $S$ es $z=2$, mientras que sus vértices son $A=1+i$, $B=3+i$, $C=1-i$ y $D=3-i$, por lo que el centro y los vértices del nuevo cuadrado cerrado son: \begin{align*} f(2) = 2(2)\operatorname{cis}\left(\frac{\pi}{2} + 0\right) = 4i,\\ f(A) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} + \frac{\pi}{4}\right) = -2+2i,\\ f(B) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{1}{3}\right)\right) = -2+6i,\\ f(C) = 2\sqrt{2}\operatorname{cis}\left(\frac{\pi}{2} – \frac{\pi}{4}\right) = 2+2i,\\ f(D) = 2\sqrt{10}\operatorname{cis}\left(\frac{\pi}{2} + \operatorname{arc tan}\left(\frac{-1}{3}\right)\right) = 2+6i. \end{align*}
Entonces $f(S)$ en el plano $w$ es el cuadrado cerrado con centro en el punto $w=4i$ cuyos lados son paralelos a los ejes real e imaginario y tienen longitud 4.
Figura 101: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Es posible visualizar las transformaciones de los ejemplos 26.1 y 26.2 en el siguiente applet de GeoGebra https://www.geogebra.org/m/pasmamyw.
Observación 26.3. En conjunto, los ejemplos 26.1 y 26.2 corresponden con transformaciones del tipo $f(z) = az + b$, donde $a,b\in\mathbb{C}$ son dos constantes, y $a\neq 0$ para no trabajar con transformaciones constantes, es decir, transformaciones afines lineales, definición 25.1.
Más aún, de acuerdo con dichos ejemplos, debe ser claro que las transformaciones afines lineales mapean regiones del plano a regiones geométricamente similares. En el caso en que $a=1$ y $b=0$, entonces tenemos a la transformación identidad $\mathbb{I}_\mathbb{C}(z)=z$.
Una pregunta interesante es ¿qué sucede con las transformaciones que no son lineales?, es decir ¿en qué se transforman los subconjuntos de $\mathbb{\mathbb{C}}$ bajo una transformación no lineal? Para responder a esta pregunta analicemos los siguientes ejemplos.
Ejemplo 26.3. Determinemos la imagen de los siguientes conjuntos bajo la transformación inversión, $f(z) = \dfrac{1}{z}$, con $z\neq 0$, $w=f(z)\neq 0$.
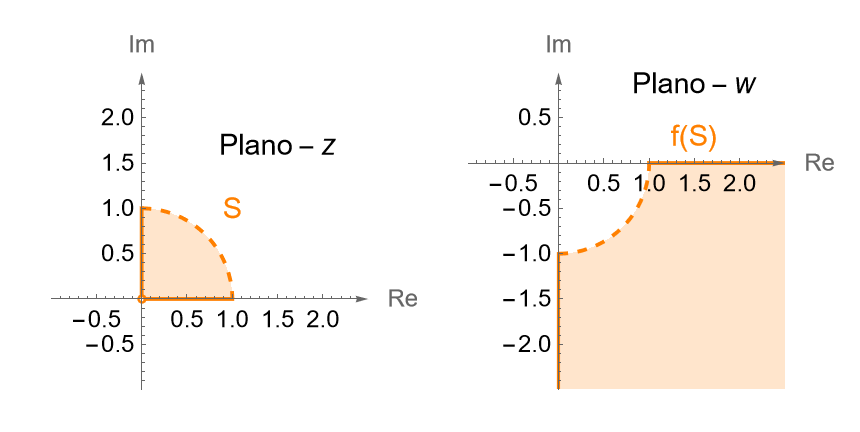
a) $S = \left\{z\in\mathbb{C} \,:\, 0<|\,z\,|<1, 0\leq \operatorname{arg} z \leq \dfrac{\pi}{2}\right\}.$ b) $S = \left\{z\in\mathbb{C} \,:\, 2\leq |\,z\,|, 0\leq \operatorname{arg} z \leq \pi\right\}.$
Solución. De acuerdo con el corolario 4.1 (fórmula de De Moivre), para $z = r\operatorname{cis}(\theta)\neq 0$, con $r=|\,z\,|$ y $\theta = \operatorname{arg} z$, tenemos que: \begin{equation*} f(z) = \frac{1}{z} = r^{-1}\operatorname{cis}(\theta) = \frac{1}{r}\left[\operatorname{cos}(-\theta) + i\,\operatorname{sen}(-\theta) \right]. \end{equation*}
Entonces, para cada $z\neq 0$, se tiene que el módulo de $f(z)$ es el recíproco del módulo de $z$, mientras que el argumento de $f(z)$ será el negativo del argumento de $z$.
a) Notemos que si $z\in S$, entonces $z$ cae en el primer cuadrante dentro de la circunferencia unitaria, incluyendo a los ejes real e imaginario, pero sin considerar a $z=0$, figura 102, ya que:
Si $0<|z|<1$, entonces $z$ cae dentro del disco unitario perforado, es decir $z\in B^*(0,1)$.
Si $0\leq \theta \leq \dfrac{\pi}{2}$, entonces tenemos a los $z$ en el primer cuadrante.
Por lo que bajo $f$, los $z\in S$ serán mapeados, en el plano $w$, fuera del disco unitario y en el cuarto cuadrante, incluyendo a los ejes real e imaginario, pero a partir de los $w$ tales que $|w|>1$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} > 1$ y $-\frac{\pi}{2}\leq -\theta \leq 0$. Entonces: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 1<|\,w\,|, -\frac{\pi}{2}\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
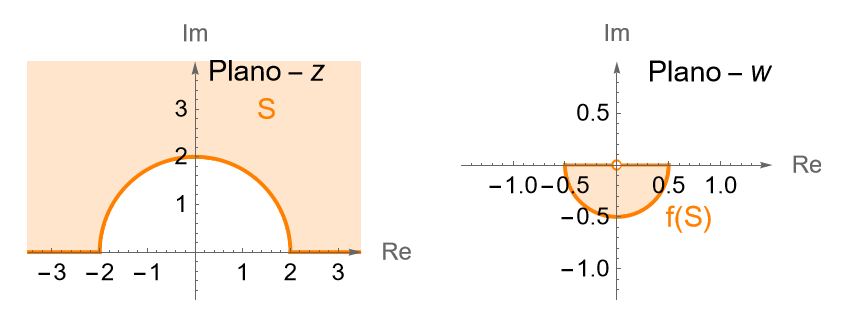
b) Notemos que si $z\in S$, entonces $z$ cae en el primer y segundo cuadrante fuera del disco de radio 2 con centro en el origen, incluyendo a la circunferencia de radio $2$ y a los ejes real e imaginario, figura 103, ya que:
Si $|z|\geq 2$, entonces $z$ cae sobre la circunferencia de radio $2$ y fuera de la misma.
Si $0\leq \theta \leq \pi$, entonces tenemos a los $z$ en el primer y segundo cuadrante.
Como el módulo de $z$ crece de $2$ a infinito, entonces bajo $f$ el módulo de $w=f(z)$ decrece de $\dfrac{1}{2}$ a $0$, pero sin llegar a valer $0$, ya que $|\,f(z)\,| = \dfrac{1}{|\,z\,|} \leq \dfrac{1}{2}$ y $|\,f(z)\,| >0$ para $z\neq 0$. Por otra parte, como $-\pi \leq – \theta \leq 0$, entonces bajo $f$ los $z$ serán mapeados, en el plano w, en el tercer y cuarto cuadrante en el disco cerrado con centro en el origen y radio $\dfrac{1}{2}$, por lo que: \begin{equation*} f(S) = \left\{ w\in\mathbb{C} \, : \, 0<|\,w\,| \leq \frac{1}{2}, -\pi\leq \operatorname{arg} w \leq 0 \right\}. \end{equation*}
Figura 102: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
Figura 103: Gráfica del conjunto $S$ en el plano $z$ y del conjunto $f(S)$ en el plano $w$.
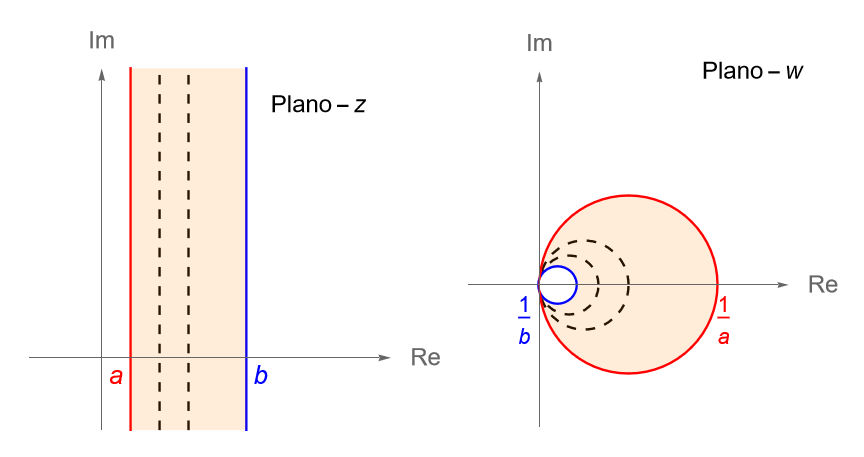
Ejemplo 26.4. Sean $a,b\in\mathbb{R}$ tales que $0<a<b$. Veamos cuál es la imagen de los siguientes conjuntos bajo la transformación inversión, $T(z)=\dfrac{1}{z}$. a) La recta vertical $x = x_0 > 0$ en el plano $z$, es decir $S = \left\{z=x+iy\in\mathbb{C} \,:\, x=x_0>0, y\in\mathbb{R}\right\}$. b) La franja vertical $S = \left\{z=x+iy\in\mathbb{C} \,:\, a\leq x \leq b, y\in\mathbb{R}\right\}$, en el plano $z$. \end{itemize}
Solución.
a) De acuerdo con la observación 25.8 como la recta vertical $x=x_0>0$ no pasa por el origen, entonces la imagen de $S$ bajo $T$ será una circunferencia que pase por el origen en el plano $w$.
Sea $z=x+iy \in S$, entonces tenemos $x = x_0 > 0$ y $y\in\mathbb{R}$. La imagen de $z$ bajo $T$ esta dada por: \begin{equation*} w = u+iv = \frac{1}{z}. \end{equation*}
De acuerdo con (25.7), proposición 25.6, tenemos que: \begin{equation*} u=\frac{x_0}{x_0^2+y^2}, \quad v = -\frac{y}{x_0^2+y^2}, \end{equation*}de donde: \begin{equation*} u^2 +v^2 = \frac{x_0^2 +y^2}{\left(x_0^2+y^2\right)^2} = \frac{1}{x_0^2+y^2} = \frac{u}{x_0}, \end{equation*}por lo que: \begin{align*} &u^2 -\frac{u}{x_0} + v^2 = 0,\\ & \Longleftrightarrow u^2 -\frac{u}{x_0} + \left(-\frac{1}{2x_0}\right)^2 + v^2 = \left(-\frac{1}{2x_0}\right)^2,\\ & \Longleftrightarrow \left( u -\frac{1}{2x_0}\right)^2 + v^2 = \left(\frac{1}{2x_0}\right)^2, \tag{26.1} \end{align*}la cual corresponde con la ecuación de una circunferencia con centro en el punto $w_0 = \dfrac{1}{2x_0} + i0$ y radio $r=\dfrac{1}{2x_0}$, en el plano $w$. Además, notemos que mientras el punto $z=0$ no cae en la recta $S$, el punto $w=0$ sí pertenece a $T(S)$.
b) Considerando el inciso anterior y la observación 25.8, si $0<a<x_0<b$, entonces la recta vertical $x=x_0$ recorre la franja vertical $S$ en el plano $z$, por lo que la imagen de cada recta vertical $x=x_0$ bajo la transformación inversión corresponderá con una circunferencia dada por (26.1), en el plano $w$. De acuerdo con la figura 104 tenemos que $T(S)$ es la región anular acotada por fuera por la circunferencia centrada en $\left(\dfrac{1}{2a}, 0\right)$ de radio $\dfrac{1}{2a}$ y por dentro por la circunferencia centrada en $\left(\dfrac{1}{2b}, 0\right)$ de radio $\dfrac{1}{2b}$.
Figura 104: Gráfica de la franja vertical $S$ bajo la transformación inversión.
Ejemplo 26.5. Determinemos la imagen de la recta vertical $x=k$, donde $k\in\mathbb{C}$ es una constante, bajo la transformación $f(z)=z^2$.
Solución. Sean $z=x+iy\in\mathbb{C}$ y $w=u+iv = f(z)$, entonces: \begin{equation*} u(x,y)=x^2-y^2, \quad v(x,y)=2xy. \end{equation*}
Dado que $x=k$, entonces los puntos sobre dicha recta vertical son de la forma: \begin{equation*} z=k+iy, \quad y\in\mathbb{R}, \end{equation*}por lo que, la imagen de dicha recta, bajo $f$, es: \begin{equation*} u=k^2-y^2, \quad v=2ky, \quad y\in\mathbb{R} \tag{26.2}. \end{equation*}
Si $k=0$, entonces la imagen de la recta vertical $x=0$, correspondiente con el eje imaginario, está dada por: \begin{equation*} u=-y^2, \quad v=0, \quad y\in\mathbb{R}. \end{equation*}
Es decir, la imagen del eje imaginario, bajo la función $f(z)=z^2$, corresponde con el semieje real negativo.
Por otra parte, si $k\neq 0$, entonces de (26.2) tenemos que: \begin{equation*} y = \frac{v}{2k} \quad \Longrightarrow \quad u = k^2 – \frac{v^2}{4k^2}, \quad \Longrightarrow \quad v^2 = -4k^2(u – k^2), \quad v\in\mathbb{R}. \end{equation*}
Por lo que, para $k\neq0$, la imagen de la recta $x=k$ corresponde con la familia de parábolas con eje paralelo al eje real $u$, con vértice en el punto $\left(k^2,0\right)$, las cuales abren hacia la izquierda y cuya intersección con el eje imaginario $v$ son los puntos $\left(0, \pm 2k^2\right)$. Dado que la imagen de las rectas $x=k$ y $x=-k$ es la misma, entonces ambas rectas, bajo $f$, son mapeadas en la parábola $v^2 = -4k^2(u – k^2)$.
Observación 26.4. De manera general, se puede hacer un análisis para la transformación $f(z)=z^n$, con $n>2$. Si consideramos a $z\neq 0$ tal que $z=re^{i\theta}$ y $w=\rho e^{i\phi}$, entonces: \begin{equation*} w=f(z) \quad \rho e^{i\phi} = r^n e^{in\theta}. \end{equation*}
No es difícil verificar que dicha transformación mapea la región: \begin{equation*} \left\{z=re^{i\theta}\in\mathbb{C}\setminus\{0\} : r\geq 0, \, 0\leq \theta \leq \frac{\pi}{n}\right\}, \end{equation*}en el semiplano superior del plano $w$.
Ejemplo 26.6. Consideremos a la región rectangular: \begin{equation*} S=\left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, 0\leq y\leq \pi\right\} \end{equation*}y determinemos su imagen bajo la transformación $f(z) = e^z$.
Solución. Fijemos a $x_0\in[-1,1]$ y consideremos al segmento de la recta vertical $x=x_0$ que está completamente contenido en $S$. Los puntos de dicho segmento son de la forma $z=x_0+iy$, con $0\leq y \leq \pi$. Para dichos puntos, por la proposición 20.2, tenemos que: \begin{equation*} w = f(z) = e^{x_0+iy} = e^{x_0} e^{iy} = e^{x_0}\left[\operatorname{cos}(y) + i \operatorname{sen}(y)\right], \quad 0\leq y \leq \pi, \end{equation*}de donde se sigue que los puntos $w=e^{x_0}\operatorname{cis}(y)$ tienen módulo $e^{x_0}$ y argumento principal $y$.
Notemos que los puntos $w=f(z)$ están sobre la circunferencia de radio $e^{x_0}$ y centro en el origen. Más aún, como $y\in[0,\pi]$, entonces dichos puntos trazan la semicircunferencia ubicada en el semiplano superior del plano $w$.
Dado que $x_0\in[-1,1]$, entonces $e^{-1}<e^1$, por lo que, los segmentos de las rectas verticales $x=x_0$, contenidos en $S$, corresponden con circunferencias de radio creciente y en conjunto forman la región anular delimitada por las semicircunferencias de radio $e^{-1}$ y $e^1$, respectivamente, amabas centradas en el origen.
De manera análoga, podemos verificar que bajo la transformación $f(z)=e^z$, la región rectangular: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -1\leq x\leq 1, -\pi\leq y\leq 0\right\}, \end{equation*}es mapeada en la región anular delimitada por las mismas semicircunferencias de radio $e^{-1}$ y $e^1$, con centro en el origen, ubicada en el semiplano inferior del plano $w$.
En general, si consideramos a la región fundamental de la exponencial, figura 78 entrada 20, es decir, la banda infinita: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : -\infty <x<\infty, -\pi< y < \pi\right\}, \end{equation*}entonces, dicho conjunto es mapeado bajo la transformación $f(z)=e^z$ en el conjunto: \begin{equation*} \mathbb{C}\setminus{L_{-\pi}} = \left\{z\in\mathbb{C} : |z|>0, -\pi< \operatorname{Arg}(z) < \pi\right\}, \end{equation*}ya que $\lim\limits_{x\to-\infty} e^x =0$ y $\lim\limits_{x\to\infty} e^x = \infty$.
Ejemplo 26.7. Sean $0<a<b$ y $0\leq \theta_1 <\theta_2 \leq \pi$. Determinemos la imagen de la región circular: \begin{equation*} S = \left\{z\in\mathbb{C} : a \leq |z| \leq b,\,\, \theta_1 \leq \operatorname{Arg}(z) \leq \theta_2\right\}, \end{equation*}bajo la transformación $\operatorname{Log}(z)$.
Solución. Notemos que la región $S$ está delimitada por las semirrectas que parten del origen y se forman por los ángulos $0\leq\theta_1$, $\theta_2\leq\pi$ y por los arcos de circunferencia de radio $a$ y $b$ con centro en el origen, como se puede ver en el siguiente applet de GeoGebra https://www.geogebra.org/m/qjzxhefv.
Consideremos a una semirrecta $L$ que parte del origen y está determinada por un ángulo $\theta$ tal que $\theta_1 \leq \theta \leq \theta_2$. Sea $z\in L \cap S$, entonces: \begin{align*} \operatorname{Log}(z) & = \operatorname{ln}|z| +i \operatorname{Arg}(z)\\ & = \operatorname{ln}|\,z\,| +i \theta. \end{align*}
Dado que $0<a\leq |\,z\,| \leq b$, tenemos que $\operatorname{ln}(a) \leq \operatorname{ln}|\,z\,| \leq \operatorname{ln}(b)$, por lo que los puntos $w=\operatorname{Log}(z)$ describen el segmento de la recta horizontal: \begin{equation*} w=u+iv, \quad \operatorname{ln}(a) \leq u \leq \operatorname{ln}(b), \quad v=\theta. \end{equation*}
Como $v\in[\theta_1, \theta_2]$, entonces el segmento de la semirrecta $L$, que está completamente contenido en $S$, cubre a $S$ conforme $v$ varía, por lo que bajo $f$ dicho segmento cubre a la región rectangular en el plano $w$ determinada por los vértices $\left(\operatorname{ln}(a), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_1\right)$, $\left(\operatorname{ln}(b), \theta_2\right)$ y $\left(\operatorname{ln}(a), \theta_2\right)$.
Observación 26.5. De acuerdo con los ejemplos 26.6 y 26.7, geométricamente debe ser claro que las funciones $\operatorname{Log}(z)$ y $e^z$ biyectan una región anular en una región rectangular y viceversa. Además, la frontera de la región anular es mapeada en la frontera de la región rectangular y viceversa.
Cerraremos esta entrada con el siguiente ejemplo correspondiente con la transformación trigonométrica $\operatorname{sen}(z)$. Por simplicidad consideraremos solo una parte de una banda infinita, pues para la parte restante el planteamiento es el mismo, sin embargo no deja de ser de suma importancia pues en conjunto nos permiten concluir que la función compleja $\operatorname{sen}(z)$ tiene como imagen a todo el plano complejo $\mathbb{C}$.
Ejemplo 26.8. Determinemos la imagen de la semibanda infinita: \begin{equation*} S = \left\{z=x+iy\in\mathbb{C} : -\frac{\pi}{2}\leq x\leq \frac{\pi}{2},\, y\geq 0\right\}, \end{equation*}bajo la transformación $f(z)=\operatorname{sen}(z)$.
Solución. De manera análoga a los ejemplos anteriores, procedemos a cubrir la región del dominio de $f$ con alguna curva simple que bajo $f$ nos permita cubrir la imagen de $S$ y así determinar dicho conjunto.
Sea $0\leq y_0 <\infty$ fijo. Consideramos el segmento de recta horizontal contenido en $S$ dado por: \begin{equation*} y=y_0, \quad -\frac{\pi}{2}\leq x\leq \frac{\pi}{2}. \end{equation*}
Sea $z=x+iy_0$ un punto sobre dicho segmento de recta, entonces, bajo $f$, por la proposición 22.1(10) tenemos que: \begin{align*} w=u+iv & = \operatorname{sen}(x+iy_0)\\ & = \operatorname{sen}(x) \operatorname{cosh}(y_0) + i \operatorname{cos}(x) \operatorname{senh}(y_0), \end{align*}de donde: \begin{equation*} u(x,y) = \operatorname{sen}(x) \operatorname{cosh}(y_0) \quad \text{y} \quad v(x,y) = \operatorname{cos}(x) \operatorname{senh}(y_0). \end{equation*}
Si $y_0=0$, tenemos que $\operatorname{cosh}(0)=1$ y $\operatorname{senh}(0)=0$, por lo que $v=0$ y $u=\operatorname{sen}(x)$, entonces la imagen del intervalo $\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, bajo $f(z)=\operatorname{sen}(z)$, es el intervalo $[-1,1]$.
Supongamos ahora que $y_0>0$. Tenemos que $\operatorname{cosh}(y_0)>0$ y $\operatorname{senh}(y_0)>0$, por lo que: \begin{equation*} \operatorname{sen}(x) = \frac{u}{\operatorname{cosh}(y_0)} \quad \text{y} \quad \operatorname{cos}(x) = \frac{v}{\operatorname{senh}(y_0)} \tag{26.3}. \end{equation*}
Para $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$ tenemos que $\operatorname{cos}(x)\leq 0$, por lo que $v\geq 0$.
Elevando al cuadrado ambas igualdades en (26.3) y sumándolas tenemos que: \begin{equation*} 1 = \operatorname{sen}^2(x) + \operatorname{cos}^2(x) = \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2. \tag{26.4} \end{equation*}
De acuerdo con (26.4), como $x\in\left[-\frac{\pi}{2}, \frac{\pi}{2}\right]$, entonces los puntos $w=u+iv$ trazan la semielipse superior: \begin{equation*} \left(\frac{u}{\operatorname{cosh}(y_0)}\right)^2 + \left(\frac{v}{\operatorname{senh}(y_0)}\right)^2 = 1, \quad v\geq 0. \end{equation*}
Los puntos de intersección de dicha semielipse con el eje real $u$ son $\left(\pm\operatorname{cosh}(y_0), 0\right)$, mientras que el punto intersección con el eje imaginario $v$ es $\left(0,\operatorname{senh}(y_0)\right)$.
Dado que: \begin{align*} \lim\limits_{y_0\to\infty} \operatorname{senh}(y_0) = \infty, &\quad \lim\limits_{y_0\to\infty} \operatorname{cosh}(y_0) = \infty,\\ \lim\limits_{y_0\to 0 } \operatorname{senh}(y_0) =0, &\quad \lim\limits_{y_0\to 0} \operatorname{cosh}(y_0) = 1, \end{align*}y $y_0\in(0,\infty)$, entonces la imagen de las semielipses se encuentra en el semiplano superior $v\geq 0$, del plano $w$, incluyendo el eje real $u$.
Se puede verificar fácilmente, ejercicio 5, que la frontera de $S$ es mapeada en la frontera de $f(S)$, correspondiente con el eje real $u$.
Determina la imagen $f(S)$ bajo la transformación lineal dada. a) $f(z) = 4z$ y $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$. b) $f(z) = iz+i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0 \right\}$. c) $f(z) = -z+2i$ y $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $f(z) = iz+2$ y $S=\left\{ z\in\mathbb{C} : |z|\leq 2, 0\leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Sea $f(z)=\dfrac{1}{z}$ la transformación inversión. Para cada conjunto $S$ determina su imagen $f(S)$. a) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 1 \right\}$. b) $S=\left\{ z\in\mathbb{C} : |z|\geq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : 0<|z|\leq 3, \dfrac{\pi}{3}\leq \operatorname{Arg}(z)\leq \dfrac{2\pi}{3} \right\}$. d) $S=\left\{ z\in\mathbb{C} : z\neq 0, 0 \leq \operatorname{Arg}(z)\leq \dfrac{\pi}{2} \right\}$.
Encuentra la imagen de $S=\left\{ z\in\mathbb{C} : |z|<1 \right\}$ bajo $f(z)=z+\overline{z}$.
Sea $f(z) = z^2$. Determina la imagen $f(S)$ de cada conjunto $S$. a) $S$ es el cuadrado con vértices $(0,0), (1,0), (1,1)$ y $(0,1)$. b) $S=\left\{ z\in\mathbb{C} : 0\leq \operatorname{Im}(z) \leq 1 \right\}$. c) $S=\left\{ z\in\mathbb{C} : \operatorname{Re}(z)>0, \operatorname{Im}(z)>0 \right\}$. d) $S=\left\{ z\in\mathbb{C} : -2 \leq \operatorname{Re}(z) \leq 0 \right\}$.
Sea $f(z) = \operatorname{sen}(z)$. a) Muestra que bajo $f$ la semirrecta $x=\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\geq 1$, $v = 0$. b) Muestra que bajo $f$ la semirrecta $x=-\dfrac{\pi}{2}$, $y\geq 0$ es mapeada en la semirrecta $u\leq -1$, $v = 0$. c) Concluye que la frontera del conjunto $S$ en el ejemplo 26.8 es mapeada en la drontera del conjunto $f(S)$. d) Sabemos que la elipse: \begin{equation*} \dfrac{x^2}{a^2} + \dfrac{y^2}{b^2} = 1, \end{equation*}con $0<b<a$, tiene focos en los puntos $\left(\pm \sqrt{a^2 – b^2}, 0\right)$. Muestra que todas las elipses del ejemplo 26.8 tienen los mismos focos en los puntos $(\pm 1,0)$.
Sea $S$ la semibanda horizontal: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : x\geq 0, -\frac{\pi}{2} \leq y \leq \frac{\pi}{2} \right\}. \end{equation*}Determina la imagen de $S$ bajo la función $f(z)=\operatorname{senh}(z)$.
Hint: Expresa a $\operatorname{senh}(z)$ en términos de $\operatorname{sen}(z)$.
Sea $w=\rho e^{i\phi}$. Muestra que la transformación $w=\dfrac{i}{z}$ mapea la hipérbola $x^2-y^2=1$ en la lemniscata $\rho^2 = 2 \operatorname{cos}(2\phi)$.
Determina una transformación que rote a la elipse $x^2+xy+y^2=2$, en el sentido de las manecillas del reloj, tal que su ecuación se reduzca a su forma canónica. Obtén la longitud de su semieje mayor y menor.
Hint: Supón que la transformación es de la forma $w=\rho e^{i\phi}$. Determina un ángulo $\alpha$ tal que el coeficiente de $uv$ en la imagen de la curva es cero.
Más adelante…
En esta entrada hemos abordado, a manera de ejemplos, el estudio de las funciones complejas como transformaciones del plano complejo, esto con el objetivo de dar una interpretación geométrica del comportamiento de las funciones complejas, ya que como mencionamos antes, visualizar la gráfica de tales funciones resulta imposible. Debe ser claro que la propuesta de esta entrada es solo una de las distintas alternativas conocidas para el estudio de la parte gráfica de una función compleja, sin embargo hay otras alternativas que pueden ser de utilidad para la comprensión del comportamiento geométrico de estas funciones, por lo que se recomienda consultar estas otras propuestas.
Con esta entrada finalizamos la segunda unidad del curso. En la siguiente entrada es la primera de la tercera unidad del curso, correspondiente con el tema de series de números complejos, en la cual estudiaremos algunos de los conceptos básicos así como algunas de las propiedades más importantes de estos objetos matemáticos, mediante los cuales probaremos una serie de resultados que serán de utilidad para caracterizar a las funciones complejas a través de dichos objetos.
La entrada anterior definimos a las funciones complejas trigonométricas e hiperbólicas, a través de la exponencial compleja y vimos que tanto las funciones trigonométricas como las funciones hiperbólicas son periódicas, puesto que la función exponencial compleja es $2\pi i $-periódica. Al igual que en el caso real, podemos preguntarnos si es que existen las funciones inversas de estas funciones, por lo que nuestro objetivo en esta entrada será responder esa pregunta y en particular deducir y definir a las funciones inversas de dichas funciones.
Durante esta entrada utilizaremos nuevamente al logaritmo complejo para deducir a las funciones inversas. Es importante recordar, entrada 21, que la función logaritmo complejo es una función multivaluada, por lo que las funciones definidas en esta entrada serán también multivaluadas. Recordemos que aunque esta terminología no cumple con la definición habitual de función, desde que asigna más de un valor a cada elemento del dominio, es importante mencionar que cada una de las ramas de dichas funciones multivaluadas sí cumplen con la definición de función con la que estamos familiarizados. Más aún, cada una de las ramas cumple con muchas de las propiedades que conocemos para sus versiones reales.
Observación 23.1. Como veremos en la entrada 26, la imagen de las funciones $\operatorname{sen}(w)$ y $\operatorname{cos}(w)$ es todo el plano complejo $\mathbb{C}$, por lo que dado $w\in\mathbb{C}$ siempre existirá $z\in\mathbb{C}$ que satisfaga $z = \operatorname{sen}(w)$ ó $z = \operatorname{cos}(w)$.
Sea $z = \operatorname{sen}(w)$. De acuerdo con la definición 22.1 tenemos que: \begin{equation*} z = \operatorname{sen}(w) = \frac{e^{iw} – e^{-iw}}{2i}, \end{equation*}de donde: \begin{equation*} (e^{iw})^2-i2z(e^{iw}) – 1 = 0. \end{equation*}Notemos que esta última expresión es una ecuación cuadrática para la variable $e^{iw}$, por lo que podemos utilizar la fórmula general para resolver dicha ecuación. En este punto es importante que recordemos que la función compleja raíz cuadrada es una función multivaluada, por lo que nos dará dos raíces complejas, entonces: \begin{equation*} e^{iw} = \frac{2iz + \sqrt{4(1-z^2)}}{2} = iz + \sqrt{1-z^2}. \end{equation*}Dependiendo de la rama que consideremos, la función $ \sqrt{1-z^2}$ nos determina dos raíces cuadradas de $1-z^2$. Estableciendo la rama de la función multivaluada $ \sqrt{1-z^2}$ con la que trabajaremos, podemos utilizar la proposición 20.1(6) obteniendo: \begin{equation*} iw = \operatorname{log}\left(iz + \sqrt{1-z^2}\right) + i2k\pi, \quad k\in\mathbb{Z}. \end{equation*}Por lo que, para $k, n\in\mathbb{Z}$: \begin{align*} w &= \frac{1}{i}\operatorname{log}\left(iz + \sqrt{1-z^2}\right) + 2 k\pi\\ &= \frac{1}{i} \left[\operatorname{ln}\left|iz + \sqrt{1-z^2}\right| + i\left(\operatorname{Arg}\left(iz + \sqrt{1-z^2}\right) + 2n\pi\right)\right] + 2 k\pi\\ &= \frac{1}{i} \left[\operatorname{ln}\left|iz + \sqrt{1-z^2}\right| + i\left(\operatorname{Arg}\left(iz + \sqrt{1-z^2}\right) + 2m\pi\right)\right]\\ &= \frac{1}{i} \left[\operatorname{ln}\left|iz + \sqrt{1-z^2}\right| + i\operatorname{arg}\left(iz + \sqrt{1-z^2}\right)\right]\\ &= -i \operatorname{log}\left(iz + \sqrt{1-z^2}\right), \end{align*}donde $m=k+n\in\mathbb{Z}$.
Se deja como ejercicio al lector
Se deja como ejercicio al lector
Sea $z = \operatorname{cot}(w)$. De acuerdo con la definición 22.2 sabemos que: \begin{equation*} \operatorname{cot}(w) = \frac{\operatorname{cos}(w)}{\operatorname{sen}(w)}, \end{equation*}donde $w \neq k \pi$, con $k\in\mathbb{Z}$.
Observación 23.2. Puesto que todas las funciones inversas, de las funciones trigonométricas, están dadas en términos de la función multivaluada logaritmo, entonces también dichas funciones son multivaluadas. Más aún, de acuerdo con la proposición 23.1, debe ser claro que se puede elegir una rama de alguna de estas funciones eligiendo primero una rama de la función multivaluada raíz cuadrada y luego una rama adecuada del logaritmo de modo que la función en cuestión esté bien definida.
Ejemplo 23.1. Supongamos que $z$ es un número real en el intervalo $(-1,1)$. Veamos que si utilizamos las ramas principales de las funciones multivaluadas raíz cuadrada y logaritmo complejo entonces obtenemos la rama principal de la función inversa de la función real seno.
Solución. Sean $z=x+iy\in\mathbb{C}$. Consideremos a la funciones multivaluadas: \begin{equation*} F(z) = \operatorname{log}(z) \quad \text{y} \quad G(z) = \sqrt{1-z^2} = e^{\frac{1}{2} \operatorname{Log}(1-z^2)} e^{ik\pi}, \,\, k=0,1. \end{equation*}
Para la primera función tenemos que su corte de rama está dado por los $z=x+iy\in\mathbb{C}$ tales que: \begin{equation*} -\pi < \operatorname{Arg}(z) \leq \pi \quad \Longleftrightarrow \quad \left\{ \begin{array}{l} \operatorname{Re}(z) = x \leq 0, \\ \\ \operatorname{Im}(z) = y = 0. \end{array} \right. \end{equation*}
De manera análoga, para la segunda función tenemos que su corte de rama está dado por los $z=x+iy\in\mathbb{C}$ tales que: \begin{equation*} \left\{ \begin{array}{l} \operatorname{Re}(1-z^2) = 1-x^2+y^2 \leq 0, \\ \\ \operatorname{Im}(1-z^2) = -2xy = 0. \end{array} \right. \end{equation*}
Como trabajaremos con las ramas principales de ambas funciones y $z=x\in\mathbb{R}$, entonces los cortes de rama de cada función, son respectivamente: \begin{equation*} \left\{x\in\mathbb{R} : x\leq 0\right\} \quad \text{y} \quad \left\{x\in\mathbb{R} : |x|\geq 1\right\}. \end{equation*}
Para $k=0$ tenemos de la segunda función que su rama principal es: \begin{equation*} g_0(z) := \sqrt{1-z^2} = e^{\frac{1}{2} \operatorname{Log}(1-z^2)}. \end{equation*}
Como $|z|=|x|<1$, entonces la función $g_0$ está bien definida, más aún, tenemos que $ 0<1-z^2\leq 1$, por lo que $\operatorname{Arg}(1-z^2) = 0$, entonces: \begin{equation*} \operatorname{Log}(1-z^2) = \operatorname{ln}|1-z^2| + i \operatorname{Arg}(1-z^2) = \operatorname{ln}(1-z^2), \end{equation*}de donde: \begin{equation*} e^{\frac{1}{2} \operatorname{Log}(1-z^2)} = \sqrt{1-x^2} \in \mathbb{R}^+. \end{equation*}
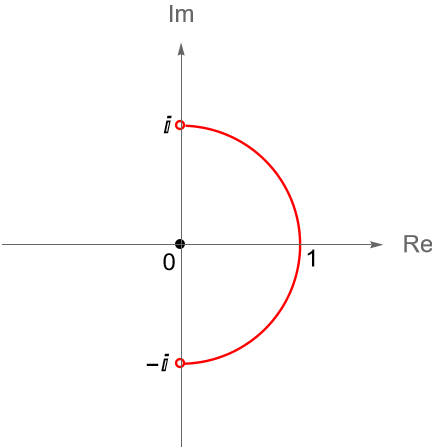
Así, al considerar las ramas principales de ambas funciones tenemos que: \begin{align*} \operatorname{sen}^{-1}(z) & = -i \operatorname{Log}\left(iz +\sqrt{1-z^2}\right)\\ & = -i \operatorname{Log}\left(iz + e^{\frac{1}{2} \operatorname{Log}(1-z^2)}\right)\\ & = -i \operatorname{Log}\left(ix + \sqrt{1-x^2}\right). \end{align*}
Dado que $iz$ es un número imaginario puro, entonces los valores que toma $iz + e^{\frac{1}{2} \operatorname{Log}(1-z^2)}$ están en la mitad derecha del plano complejo, por lo que no están en el corte de rama de la función logaritmo. De hecho, dichos valores están sobre la mitad de la circunferencia unitaria que está en la mitad derecha del plano complejo, figura 83, ya que: \begin{equation*} \left| iz +\sqrt{1-z^2} \right| = \sqrt{x^2+(1-x^2)} = 1. \end{equation*}
donde $-\dfrac{\pi}{2}<\operatorname{Arg}\left(ix + \sqrt{1-x^2}\right)<\dfrac{\pi}{2}$, entonces: \begin{equation*} -\dfrac{\pi}{2}<\operatorname{sen}^{-1}(z)<\dfrac{\pi}{2}, \end{equation*}para los $z=x\in\mathbb{R}$ tales que $|x|<1$.
Figura 83: Puntos $ix + \sqrt{1-x^2}$ para $x\in\mathbb{R}$ tales que $|x|<1$.
Ejemplo 23.2. Resolvamos la ecuación $\operatorname{tan}(z)=2$.
Solución. De acuerdo con la proposición 23.1(3), si elegimos la rama principal del logaritmo tenemos que: \begin{align*} \operatorname{tan}^{-1}(2) & = \dfrac{i}{2} \operatorname{log}\left(\dfrac{i+2}{i-2}\right)\\ & = \dfrac{i}{2} \operatorname{log}\left(\dfrac{-3-4i}{5}\right)\\ & = \dfrac{i}{2}\left[ \operatorname{ln}\left|\dfrac{-3-4i}{5}\right| + i \left( \operatorname{Arg}\left(\dfrac{-3-4i}{5}\right) + 2 k\pi \right)\right]\\ & = \dfrac{i}{2}\left[ \operatorname{ln}\left(1\right) + i \left( \operatorname{arctan}\left(\dfrac{4}{3}\right) -\pi + 2 k\pi \right)\right]\\ & = \dfrac{1}{2}\left[ (2 k – 1)\pi – \operatorname{arctan}\left(\dfrac{4}{3}\right) \right], \quad k\in\mathbb{Z}. \end{align*}
Observación 23.3. Dado que las funciones inversas de las funciones trigonométricas complejas son multivaluadas, entonces debemos ser cuidadosos al derivar estas expresiones. En general, una vez establecidas las ramas de las funciones multivaluadas raíz cuadrada y logaritmo, se puede derivar las funciones inversas dentro de su dominio de analicidad mediante la regla de la cadena.
$\dfrac{d}{dz}\operatorname{sen}^{-1}(z) = \dfrac{1}{\sqrt{1-z^2}}$, para $z\neq \pm 1$.
$\dfrac{d}{dz}\operatorname{cos}^{-1}(z) = -\dfrac{1}{\sqrt{1-z^2}}$, para $z\neq \pm 1$.
$\dfrac{d}{dz}\operatorname{tan}^{-1}(z) = \dfrac{1}{1+z^2}$, para $z\neq \pm i$.
$\dfrac{d}{dz}\operatorname{cot}^{-1}(z) = -\dfrac{1}{1+z^2}$, para $z\neq \pm i$.
$\dfrac{d}{dz}\operatorname{sec}^{-1}(z) = \dfrac{1}{z^2\sqrt{1-\frac{1}{z^2}}}$, para $z\neq \pm 1$ y $z\neq 0$.
$\dfrac{d}{dz}\operatorname{csc}^{-1}(z) = – \dfrac{1}{z^2\sqrt{1-\frac{1}{z^2}}}$, para $z\neq \pm 1$ y $z\neq 0$.
Demostración.
Una vez elegida una rama de la función multivaluada $\sqrt{1-z^2}$ y una adecuada rama para la función logaritmo, por la regla de la cadena tenemos que: \begin{align*} \dfrac{d}{dz}\operatorname{sen}^{-1}(z) & = \dfrac{d}{dz} = -i \operatorname{log}\left(iz +\sqrt{1-z^2}\right)\\ & = -i \left(\dfrac{i-\dfrac{z}{\sqrt{1-z^2}}}{iz +\sqrt{1-z^2}}\right)\\ & = -i \left(\dfrac{i\sqrt{1-z^2} – z}{\left[iz +\sqrt{1-z^2}\right] \sqrt{1-z^2}}\right)\\ & = \dfrac{1}{\sqrt{1-z^2}}. \end{align*}Donde la igualdad se mantiene siempre que se utilice la misma rama de $\sqrt{1-z^2}$ tanto en la definición de la función $\operatorname{sen}^{-1}(z)$ como en la expresión de su derivada.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 23.3. Consideremos a las ramas principales de la funciones multivaluadas raíz cuadrada y logaritmo y determinemos el valor de la derivada de la función $\operatorname{sen}^{-1}(z)$ en el punto $z=i$.
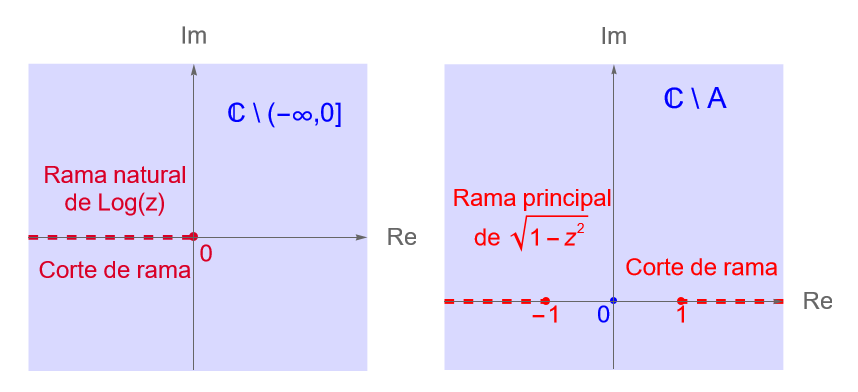
Solución. De acuerdo con el ejemplo 23.1, sabemos que los cortes de rama de las ramas principales de las funciones multivaluadas $\operatorname{log}(z)$ y $\sqrt{1-z^2}$ son, respectivamente: \begin{equation*} (-\infty,0]=\left\{z=x+iy\in\mathbb{C} : x \leq 0, y=0\right\} \quad \text{y} \quad A:= \left\{z=x+iy\in\mathbb{C} : |x|\geq 1, y=0\right\}. \end{equation*}
Figura 84: Cortes de rama de las ramas principales de las funciones multivaluadas $\operatorname{log}(z)$ y $\sqrt{1-z^2}$.
De acuerdo con lo anterior, es claro que el punto $z=i$ no pertenece al corte de rama, de la rama principal de $\sqrt{1-z^2}$. Por otra parte, tenemos que $1-i^2 = 2$, entonces: \begin{equation*} i(i) + \sqrt{1-i^2} = -1+\sqrt{2}, \end{equation*}el cual no es un punto sobre el corte de rama, de la rama principal del logaritmo. Por lo tanto, de la proposición 23.2(1) se sigue que: \begin{align*} \left. \frac{d}{dz} \operatorname{sen}^{-1}(z) \right|_{z=i} & = \left. \dfrac{1}{\sqrt{1-z^2}}\right|_{z=i}\\ & = \dfrac{1}{\sqrt{1-i^2}}\\ & = \dfrac{1}{\sqrt{2}}. \end{align*}
Por último, si utilizamos la rama principal de la función $\sqrt{1-z^2}$ tenemos: \begin{align*} \left. \sqrt{1-z^2} \right|_{z=i} = \left. e^{\frac{1}{2} \operatorname{Log}(1-z^2)} \right|_{z=i} & = e^{\frac{1}{2} \operatorname{Log}(1-i^2)} \\ & = e^{\frac{1}{2} \operatorname{Log}(2)}\\ & = e^{\frac{1}{2}\left[\operatorname{ln}|2| + i \operatorname{Arg}(2)\right]}\\ & = e^{\operatorname{ln}\left(\sqrt{2}\right)}\\ & = \sqrt{2}. \end{align*}
Por lo que la derivada es $\dfrac{1}{\sqrt{2}}$, es decir, el resultado coincide con el valor obtenido al utilizar la fórmula de la derivada.
Ejemplo 23.4. Consideremos ahora el punto $z=\sqrt{5}$. De acuerdo con el ejemplo anterior, es claro que dicho punto está en el corte de rama, de la rama principal de la función multivaluada $\sqrt{1-z^2}$, por lo que utilizando dicha rama no podemos obtener el valor de la función $\operatorname{sen}^{-1}(z)$ ni de su derivada en $z=\sqrt{5}$. Entonces procedemos a elegir una nueva rama para la raíz cuadrada de modo que sea posible determinar dichos valores.
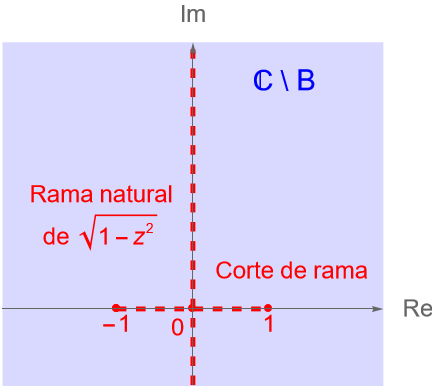
Solución. Por simplicidad elegimos a la rama natural de la raíz, es decir: \begin{equation*} \sqrt{1-z^2} = e^{\frac{1}{2} \operatorname{Log}_{[0,2\pi)}(1-z^2)}, \quad 0 \leq \operatorname{Arg}(1-z^2) < 2\pi. \end{equation*}
El corte de rama de esta función está dado por los $z=x+iy\in\mathbb{C}$ tales que: \begin{align*} 0 \leq \operatorname{Arg}(1-z^2) < 2\pi & \quad \Longleftrightarrow \quad \left\{ \begin{array}{l} \operatorname{Re}(1-z^2) = 1+y^2-x^2 \geq 0, \\ \\ \operatorname{Im}(1-z^2) = -2xy = 0. \end{array} \right.\\ & \\ & \quad \Longleftrightarrow \quad B:= \left\{z=x+iy\in\mathbb{C} : |x|\leq 1, y=0\right\} \cup \left\{z=x+iy\in\mathbb{C} : x=0, y\in\mathbb{R}\right\}. \end{align*}
Figura 85: Corte de rama, de la rama natural, de la función multivaluada $\sqrt{1-z^2}$.
Para esta rama es claro que el punto $z=\sqrt{5}$ no está en su corte de rama, por tanto podemos utilizarla. Tenemos que $1-(\sqrt{5})^2 = -4$, entonces: \begin{align*} \operatorname{Log}_{[0,2\pi)}(-4) &= \operatorname{ln}|-4| + i\operatorname{Arg}_{[0,2\pi)}(-4)\\ &= \operatorname{ln}(4) + i\pi, \end{align*}por lo que: \begin{align*} \left.\sqrt{1-z^2}\right|_{z=\sqrt{5}} & = \sqrt{1-(\sqrt{5})^2}\\ & = e^{\frac{1}{2} \operatorname{Log}_{[0,2\pi)}(-4)}\\ & = e^{\operatorname{ln}(2)} e^{i\frac{\pi}{2}}\\ &= 2i. \end{align*}
Dado que $i \sqrt{5}+2i = i(2+\sqrt{5})$ no es un punto sobre el corte de rama, de la rama principal del logaritmo, entonces utilizaremos de nuevo dicha rama. Por lo que: \begin{align*} \left.\operatorname{sen}^{-1}(z)\right|_{z=\sqrt{5}} & = \left. – i\operatorname{Log}\left(iz+\sqrt{1-z^2}\right)\right|_{z=\sqrt{5}}\\ & = -i\operatorname{Log}\left(i\left(2+\sqrt{5} \right)\right)\\ & = -i\left[\operatorname{ln}\left|i\left(2+\sqrt{5} \right)\right| + i \operatorname{Arg}\left(i\left(2+\sqrt{5} \right)\right)\right]\\ & = -i\left[\operatorname{ln}\left(2+\sqrt{5}\right) + i \frac{\pi}{2}\right]\\ & = \frac{\pi}{2} -i\operatorname{ln}\left(2+\sqrt{5}\right). \end{align*}
Procediendo de forma completamente análoga que con la proposición 23.1, es posible establecer las expresiones para las funciones inversas de las funciones hiperbólicas, que al estar definidas en términos de la exponencial compleja, también resultan ser funciones multivaluadas.
$\operatorname{tanh}^{-1}(z) = \dfrac{1}{2} \operatorname{log}\left(\dfrac{1+z}{1-z}\right)$, para $z\neq \pm 1$.
$\operatorname{coth}^{-1}(z) = \dfrac{1}{2} \operatorname{log}\left(\dfrac{z+1}{z-1}\right)$, para $z\neq \pm 1$.
$\operatorname{sech}^{-1}(z) = \operatorname{log}\left(\dfrac{1 + z\sqrt{\dfrac{1}{z^2}-1}}{z}\right)$, para $z\neq 0$.
$\operatorname{csch}^{-1}(z) = \operatorname{log}\left(\dfrac{1 + z\sqrt{\dfrac{1}{z^2}+1}}{z}\right)$, para $z\neq 0$.
Demostración.
Se deja como ejercicio al lector.
Sea $z = \operatorname{cosh}(w)$. De acuerdo con la definición 22.3 tenemos que: \begin{equation*} z = \operatorname{cosh}(w) = \frac{e^{w} + e^{-w}}{2}, \end{equation*}de donde: \begin{equation*} (e^{w})^2-2z(e^{w}) + 1 = 0. \end{equation*}Resolvemos la ecuación cuadrática para $e^w$ utilizando la fórmula general, entonces: \begin{equation*} e^{w} = \frac{2z + \sqrt{4(z^2-1)}}{2} = z + \sqrt{z^2-1}, \end{equation*}donde la función multivaluada $\sqrt{z^2-1}$ determina dos raíces complejas de $z^2-1$. Por lo que, una vez establecida la rama de dicha función multivaluada, podemos utilizar la proposición 20.1(6), para $k, n\in\mathbb{Z}$, como sigue: \begin{align*} w &= \operatorname{log}\left(z + \sqrt{z^2-1}\right) + i2k\pi\\ &= \operatorname{ln}\left|z + \sqrt{z^2-1}\right| + i\left(\operatorname{Arg}\left(z + \sqrt{z^2-1}\right) + 2m\pi\right)\\ &= \operatorname{ln}\left|z + \sqrt{z^2-1}\right| + i\operatorname{arg}\left(z + \sqrt{z^2-1}\right)\\ &= \operatorname{log}\left(z + \sqrt{z^2-1}\right), \end{align*}donde $m=k+n\in\mathbb{Z}$.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 23.5. Veamos que $\operatorname{tanh}^{-1}\left(\dfrac{1}{z}\right) = \operatorname{coth}^{-1}\left(z\right)$.
$\dfrac{d}{dz}\operatorname{senh}^{-1}(z) = \dfrac{1}{\sqrt{1+z^2}}$, para $z\neq \pm i$.
$\dfrac{d}{dz}\operatorname{cosh}^{-1}(z) = \dfrac{1}{\sqrt{z^2 – 1}}$, para $z\neq \pm 1$.
$\dfrac{d}{dz}\operatorname{tanh}^{-1}(z) = \dfrac{1}{1-z^2}$, para $z\neq \pm 1$.
$\dfrac{d}{dz}\operatorname{coth}^{-1}(z) = \dfrac{1}{1-z^2}$, para $z\neq \pm 1$.
$\dfrac{d}{dz}\operatorname{sech}^{-1}(z) = -\dfrac{1}{z^2\sqrt{\dfrac{1}{z^2}-1}}$, para $z\neq \pm 1$ y $z\neq 0$.
$\dfrac{d}{dz} \operatorname{csch}^{-1}(z) = – \dfrac{1}{z^2\sqrt{\dfrac{1}{z^2}+1}}$, para $z\neq \pm i$ y $z\neq 0$.
Demostración.
Se deja como ejercicio al lector.
Una vez establecida una rama de la función multivaluada $\sqrt{z^2-1}$ y una adecuada rama para la función logaritmo, procedemos a derivar utilizando la regla de la cadena, entonces: \begin{align*} \dfrac{d}{dz}\operatorname{cosh}^{-1}(z) & = \dfrac{d}{dz} \operatorname{log}\left(z + \sqrt{z^2-1}\right)\\ & = \dfrac{1+\dfrac{z}{\sqrt{z^2-1}}}{z + \sqrt{z^2-1}}\\ & = \dfrac{z +\sqrt{z^2-1}}{\left(z +\sqrt{z^2-1} \,\right) \sqrt{z^2-1}}\\ & = \dfrac{1}{\sqrt{z^2-1}}. \end{align*}Donde la igualdad se mantiene siempre que se utilice la misma rama de $\sqrt{z^2-1}$ tanto en la definición de la función $\operatorname{cosh}^{-1}(z)$ como en la expresión de su derivada.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 23.6. Utilizando la rama natural de la función $\sqrt{z^2-1}$ y la rama principal del logaritmo determinemos: a) $\operatorname{cosh}^{-1}\left(\dfrac{1}{\sqrt{2}}\right)$. b) $\dfrac{d}{dz}\operatorname{cosh}^{-1}\left(\dfrac{1}{\sqrt{2}}\right)$.
¿Es posible determinar los valores de cada inciso si se considera la rama principal de la función $\sqrt{z^2-1}$?
Solución. De acuerdo con el ejercicio 13.15, sabemos que para la función multivaluada $\sqrt{z^2-1}$ los cortes de rama, considerando las ramas principal y natural son, respectivamente: \begin{equation*} \left\{z=x+iy\in\mathbb{C} : |x|\leq 1, y=0\right\} \quad \text{y} \quad \left\{z=x+iy\in\mathbb{C} : |x|\geq 1, y=0\right\}. \end{equation*}
Dado que $z=\dfrac{1}{\sqrt{2}}$ y $|z|<1$, entonces dicho punto está sobre el corte de rama, de la rama principal de la función $\sqrt{z^2-1}$, por tanto no podemos utilizar dicha rama para determinar los valores que nos pide cada inciso.
Por otra parte, es claro que $z=\dfrac{1}{\sqrt{2}}$ no está sobre el corte de rama, de la rama natural de la función $\sqrt{z^2-1}$, entonces: \begin{equation*} \sqrt{1-z^2} = e^{\frac{1}{2} \operatorname{Log}_{[0,2\pi)}(z^2-1)}, \quad 0 \leq \operatorname{Arg}(z^2-1) < 2\pi. \end{equation*}
Dado que $\dfrac{1}{\sqrt{2}} + i\dfrac{1}{\sqrt{2}} = \dfrac{1}{\sqrt{2}}\left(1+i\right)$ no es un punto sobre el corte de rama, de la rama principal del logaritmo, entonces utilizaremos de nuevo dicha rama. Por lo que: \begin{align*} \left.\operatorname{cosh}^{-1}(z)\right|_{z=\frac{1}{\sqrt{2}}} & = \left. \operatorname{Log}\left(z+\sqrt{z^2-1}\right)\right|_{z=\frac{1}{\sqrt{2}}}\\ & =\operatorname{Log}\left( \dfrac{1}{\sqrt{2}}\left(1+i\right)\right)\\ & =\operatorname{ln}\left| \dfrac{1}{\sqrt{2}}\left(1+i\right)\right| + i \operatorname{Arg}\left( \dfrac{1}{\sqrt{2}}\left(1+i\right)\right)\\ & = \operatorname{ln}\left(1\right) + i \frac{\pi}{4}\\ & = i\frac{\pi}{4}. \end{align*}
Completa las demostraciones de las proposiciones de esta entrada.
Sean $w=\operatorname{cos}(z)$ y $\zeta = e^{iz}$. Muestra que: \begin{align*} \zeta & = w+\sqrt{w^2-1},\\ \operatorname{cos}^{-1}(w) & = -i\operatorname{log}\left(w\pm \sqrt{w^2-1}\right). \end{align*}
Muestra que los puntos de ramificación de la función multivaluada $\operatorname{sen}^{-1}(z)$ son $z=\pm 1$.
Demuestra que si $a\in\mathbb{R}$ y $a>1$, entonces: \begin{equation*} \operatorname{tanh}^{-1}(a) = \operatorname{Log}\sqrt{\frac{a+1}{a-1}} + i \frac{2k+1}{2} \pi, \quad k\in\mathbb{Z}. \end{equation*}
Muestra que si se usa la misma rama de la función $\sqrt{1-z^2}$ en la definición de las funciones multivaluadas $\operatorname{sen}^{-1}(z)$ y $\operatorname{cos}^{-1}(z)$, proposición 23.1, entonces: a) $\operatorname{sen}^{-1}(z) + \operatorname{cos}^{-1}(z) = 2k\pi +\frac{\pi}{2}, \,\, k\in\mathbb{Z}$. b) $\operatorname{tan}^{-1}(z) + \operatorname{cot}^{-1}(z) = k\pi -\frac{\pi}{2}, \,\, k\in\mathbb{Z}$.
Resuelve las siguientes ecuaciones: a) $\operatorname{senh}(5z+i) = -\sqrt{3} i$. b) $\operatorname{tanh}\left(\frac{z-3}{2}\right) = -1+ i$. c) $\operatorname{cot}(z) = 2i$. d) $\operatorname{cosh}^2(z) = -1$.
Prueba que: \begin{equation*} \operatorname{tanh}^{-1}\left(e^{i\theta}\right) = \frac{1}{2} \operatorname{log}\left(i \operatorname{cot}\left(\frac{\theta}{2}\right)\right). \end{equation*}Determina una expresión similar para $\operatorname{tan}^{-1}\left(e^{i\theta}\right)$.
Demuestra que: \begin{equation*} \operatorname{tan}\left(i \operatorname{log}\left(\frac{a-ib}{a+ib}\right)\right) = \frac{2ab}{a^2 – b^2}. \end{equation*}Hint: sustituye $z$ por $\dfrac{2ab}{a^2 – b^2}$ en la definición de $\operatorname{tan}^{-1}(z)$.
Determina los puntos de ramificación de las siguientes funciones: a) $\operatorname{cos}^{-1}(z)$. b) $\operatorname{tan}^{-1}(z^2+2z+1)$.
Más adelante…
En esta entrada hemos abordado de manera general las definiciones de las funciones inversas de las funciones trigonométricas e hiperbólicas. Vimos que estas funciones resultan ser funciones multivaluadas, por lo que es importante recordar los conceptos de la entrada 13 referentes a este tipo de funciones, como los conceptos de rama de una función multivaluada, corte de rama y puntos de ramificación, ya que a través de estos conceptos es posible determinar de manera clara los dominios de analicidad de dichas funciones. Así mismo, vimos que una vez definida una rama de alguna de estas funciones inversas, es posible determinar su derivada a través de la regla de la cadena.
La siguiente entrada abordaremos el concepto de transformación, que como hemos visto en nuestros cursos de Geometría y Álgebra Lineal resulta ser una herramienta muy útil para el estudio de funciones de varias variables, en este caso para las funciones complejas, ya que a través de dicho concepto podremos dar una interpretación geométrica del comportamiento de las funciones complejas.
En la entrada 16 abordamos algunas de las funciones elementales en el estudio de la variable compleja. Vimos que todas las funciones de dicha entrada estaban motivadas por la extensión de las funciones reales a $\mathbb{C}$, además de que todas las funciones definidas en dicha entrada estuvieron dadas en términos de la función exponencial compleja, por lo que nos resulta de gran interés estudiar a detalle las propiedades de dicha función y justificar el por qué la definición dada para dicha función realmente extiende a la función exponencial real.
En esta entrada abordaremos de nueva cuenta a algunas de las funciones elementales desde el sentido complejo, pero utilizando series de potencias. Como veremos, esta caracterización nos permitirá entender mejor la analicidad de dichas funciones.
Primeramente consideremos la definición de la función exponencial como una serie de potencias dada en nuestros cursos de cálculo. Si $x \in \mathbb{R}$, entonces: \begin{equation*} \operatorname{exp}(x) = e^x = \sum_{n=0}^\infty \frac{x^n}{n!} \tag{31.1}. \end{equation*}
De acuerdo con la definición 20.1, tenemos que si $z=x+iy\in\mathbb{C}$, entonces la función exponencial compleja está dada por: \begin{equation*} \operatorname{exp}(z) = e^x\left[\operatorname{cos}(y) + i \operatorname{sen}(y)\right]. \tag{31.2} \end{equation*}
Por la fórmula de Euler tenemos que si $z\in\mathbb{C}$ es un número complejo puro, es decir, $z=iy$ con $y\in\mathbb{R}$, entonces: \begin{equation*} \operatorname{exp}(iy) =\operatorname{cos}(y) + i \operatorname{sen}(y). \tag{31.3} \end{equation*}
Motivados en la definición de la función exponencial para el caso real (31.1), veamos que mediante series de potencias podemos dar una definición similar para el caso complejo, que extienda de manera natural a la exponencial real a su versión compleja. Más aún, veamos que a través de dicha definición podemos justificar la definición (31.2) y todos los resultados de la entrada 20, como la fórmula de Euler (31.1), que resultarán ser consecuencia de esta expansión en series y sus propiedades.
Entonces, la pregunta fundamental es ¿cómo podemos llegar a una expresión similar a la de (31.1) para el caso complejo?
Sea $z\in\mathbb{C}$. Definimos a la función: \begin{equation*} f(z) = \sum_{n=0}^\infty c_n z^n. \end{equation*}
Dado que $f$ es nuestra función candidata a ser la exponencial compleja, de acuerdo con las propiedades de la exponencial compleja vistas en la entrada 20, planteamos la siguiente ecuación diferencial con condición inicial. \begin{equation*} f(z) = f'(z), \quad f(0) = 1 \tag{31.4} \end{equation*}
La respuesta a nuestra pregunta está dada por la solución de la ecuación diferencial anterior.
Tenemos que: \begin{equation*} f(z) = c_0 + c_1 z + c_2 z^2 + c_3 z^3 + \cdots, \end{equation*}como la función exponencial es entera, entonces el radio de convergencia de la serie que define a $f$ debe ser infinito, entonces, por la proposición 30.2 tenemos que el de su derivada también es infinito y $f’$ deberá estar dada por la derivada término a término de la serie que la define, es decir: \begin{align*} f(z) = c_0 + c_1 z + c_2 z^2 + c_3 z^3 + \cdots,\\ f'(z) = c_1 + 2c_2 z + 3c_3 z^2 + 4 c_4 z^3 + \cdots . \end{align*}
Como $f(z) = f'(z)$, entonces, por el corolario 30.2, los coeficientes de ambas series deben ser iguales, es decir: \begin{equation*} c_0 = c_1, \,\, c_1 = 2 c_2, \,\, c_2 = 3 c_3, \,\, \ldots, c_{n-1} = n c_n, \end{equation*}de donde $c_n = \dfrac{1}{n} c_{n-1}$, para todo $n\geq 1$.
Considerando lo anterior y la condición inicial $f(0) = 1$, entonces $c_0 = 1$, por lo que: \begin{equation*} c_1 = 1, \,\, c_2 = \frac{1}{2} = \frac{1}{2!}, \,\, c_3 = \left(\frac{1}{3}\right) \left(\frac{1}{2}\right) = \frac{1}{3!}, \,\, \ldots \,\, , c_{n} = \left( \frac{1}{n}\right)\left( \frac{1}{(n-1)!}\right) = \frac{1}{n!}. \end{equation*}
Por lo que, la solución a la ecuación diferencial (31.4) es: \begin{equation*} f(z) = \sum_{n=0}^\infty \frac{z^n}{n!}, \forall z\in\mathbb{C}. \end{equation*}
Definición 31.1. (Exponencial compleja como serie de potencias.) Sea $z \in\mathbb{C}$, entonces definimos a la exponencial compleja como la serie de potencias: \begin{equation*} \operatorname{exp}(z) = \sum_{n=0}^\infty \frac{z^n}{n!}. \tag{31.5} \end{equation*}
Observación 31.1. En el ejemplo 27.8 hemos probado que la serie de potencias que define a la exponencial compleja es absolutamente convergente para todo $z\in\mathbb{C}$. Por lo que la función exponencial compleja está bien definida para todo $z\in\mathbb{C}$.
Podemos mencionar algunas de las propiedades más importantes de esta función, dada como series de potencias, en la siguiente:
Proposición 31.1. (Propiedades de la exponencial compleja.) La función exponencial compleja definida como en (31.5) satisface las siguientes propiedades.
Es una función entera y para todo $z\in\mathbb{C}$ se cumple que $\dfrac{d}{dz} \operatorname{exp}(z) = \operatorname{exp}(z)$.
$\operatorname{exp}(0) = 1$.
$\operatorname{exp}(z_1 + z_2) = \operatorname{exp}(z_1) \operatorname{exp}(z_2)$ para todo $z_1, z_2 \in\mathbb{C}$.
$\operatorname{exp}(z) \neq 0$ para todo $z\in\mathbb{C}$.
$\operatorname{exp}(-z) = \dfrac{1}{\operatorname{exp}(z)}$ y $\operatorname{exp}(z_1 – z_2) = \dfrac{\operatorname{exp}(z_1)}{\operatorname{exp}(z_2)}$, para cualesquiera $z, z_1, z_2 \in\mathbb{C}$.
$\overline{\operatorname{exp}(z)} = \operatorname{exp}\left(\overline{z}\right)$ para todo $z\in\mathbb{C}$.
Para todo $z\in\mathbb{C}$ se cumple que $|\operatorname{exp}(z)| = \operatorname{exp}\left(\operatorname{Re}(z)\right)$, de donde: \begin{equation*} |\operatorname{exp}(i\theta)| = 1 \quad \Longleftrightarrow \quad \theta \in\mathbb{R} \quad \text{y} \quad |\operatorname{exp}(z)| \leq \operatorname{exp}(|z|). \end{equation*}
Demostración.
Sea $z\in\mathbb{C}$, entonces, por la proposición 30.2 se cumple que: \begin{equation*} \dfrac{d}{dz} \operatorname{exp}(z) = \dfrac{d}{dz} \sum_{n=0}^\infty \frac{z^n}{n!} = \sum_{n=1}^\infty \frac{n z^{n-1}}{n (n-1)!} = \sum_{n=0}^\infty \frac{z^n}{n!} = \operatorname{exp}(z). \end{equation*}
Es inmediata de la definición de la función exponencial compleja.
Sean $z_1, z_2 \in\mathbb{C}$, entonces: \begin{equation*} \operatorname{exp}(z_1) = \sum_{n=0}^\infty \frac{z_1^n}{n!} \quad \text{y} \quad \operatorname{exp}(z_2) = \sum_{n=0}^\infty \frac{z_2^n}{n!}. \end{equation*}Por el ejemplo 27.8 sabemos que ambas series son absolutamente convergentes. Del ejemplo 27.11, tenemos que el producto de Cauchy de dichas series es: \begin{equation*} \sum_{n=0}^\infty c_n = \sum_{n=0}^\infty \frac{(z_1 + z_2)^n}{n!}. \end{equation*}Por último, por el ejemplo 27.12, sabemos que el producto de estas series absolutamente convergentes, converge a su producto de Cauchy, es decir: \begin{align*} \operatorname{exp}(z_1) \operatorname{exp}(z_2) & = \left(\sum_{n=0}^\infty \frac{z_1^n}{n!}\right) \left(\sum_{n=0}^\infty \frac{z_2^n}{n!}\right)\\ & = \sum_{n=0}^\infty \frac{(z_1 + z_2)^n}{n!}\\ & = \operatorname{exp}(z_1 + z_2). \end{align*}Por inducción es fácil verificar que: \begin{equation*} \prod_{i=1}^n \operatorname{exp}(z_i) = \operatorname{exp}\left( \sum_{i=1}^n z_i\right), \quad \forall n\geq 2. \end{equation*}
Se sigue de los incisos 2 y 3, por lo que los detalles se dejan como ejercicio al lector.
Se sigue de los incisos 2 y 3, por lo que los detalles se dejan como ejercicio al lector.
El resultado se sigue de la proposición 27.2(2).
Sea $z\in\mathbb{C}$. Sabemos que: \begin{equation*} \operatorname{Re}(z) = \frac{z + \overline{z}}{2} \quad \text{y} \quad |z|^2 = z \overline{z}. \end{equation*}De los incisos 3, 4 y 6 tenemos que: \begin{equation*} |\operatorname{exp}(z)|^2 = \operatorname{exp}(z) \overline{\operatorname{exp}(z)} = \operatorname{exp}(z) \operatorname{exp}\left(\overline{z}\right) = \operatorname{exp}\left(z+\overline{z}\right) = \operatorname{exp}\left(2 \operatorname{Re}(z)\right) = \left[\operatorname{exp}\left(\operatorname{Re}(z)\right)\right]^2 >0, \end{equation*}de donde: \begin{equation*} |\operatorname{exp}(z)| = \operatorname{exp}\left(\operatorname{Re}(z)\right). \end{equation*}La parte restante del resultado se sigue de esta última igualdad, por lo que los detalles se dejan como ejercicio al lector.
$\blacksquare$
Es claro que si $z=x\in\mathbb{R}$, entonces las definiciones (31.5) y (31.1), correspondientes con la exponencial compleja y la exponencial real, coinciden. Sin embargo, procedemos a verificar que en efecto la exponencial compleja extiende a la exponencial real de manera formal.
Recordemos los siguientes resultados de Cálculo.
Teorema 31.1. (Teorema del Valor Intermedio.) Sea $f:[a, b] \to \mathbb{R}$ una función continua en $[a, b]$. Entonces, para todo $y$ entre $f(a)$ y $f(b)$ existe $c\in [a, b]$ tal que $f(c) = y$.
Teorema 31.2. (Teorema del Valor Medio.) Sea $f:[a,b] \to \mathbb{R}$ una función continua en $[a, b]$ y diferenciable en $(a, b)$. Entonces, existe $c\in (a, b)$ tal que: \begin{equation*} f'(c) = \frac{f(b) – f(a)}{b – a}. \end{equation*}
Lema 31.1. Si $f:(a,b) \to \mathbb{R}$ es una función diferenciable en $(a, b)$ tal que $f'(x)>0$ para todo $x\in(a, b)$, entonces $f$ es estrictamente creciente en $(a, b)$.
Demostración. Es una consecuencia de teorema del valor medio, por lo que se deja como ejercicio al lector.
$\blacksquare$
Lema 31.2. Si $f:[a,b] \to \mathbb{R}$ es una función estrictamente creciente en $[a, b]$, entonces $f$ es inyectiva.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Lema 31.3. Sea $I\subset\mathbb{R}$ un intervalo. Si $f:I \to \mathbb{R}$ es una función continua e inyectiva. Entonces $f^{-1}$ es continua.
Demostración.Se deja como ejercicio al lector.
$\blacksquare$
Puede consultarse la prueba de estos resultados en alguno de los siguientes textos:
Elementary Analysis: The Theory of Calculus de Kenneth A. Ross.
An Introduction to Analysis de William R. Wade.
An Introduction to Analysis de James R. Kirkwood.
Procedemos con el resultado.
Corolario 31.1. ($\pmb{e^x = \operatorname{exp}|_{\mathbb{R}}(x)}$.) Si $z = x+i0 \in\mathbb{C}$, con $x\in\mathbb{R}$, entonces la función $u(x) = \operatorname{exp}|_{\mathbb{R}}(x)$, es decir, la exponencial compleja restringida a $\mathbb{R}$, satisface lo siguiente:
$u$ es una función real, continua y estrictamente creciente en su dominio $\mathbb{R}$.
$u(\mathbb{R}) = (0, \infty)$.
$u$ es un homeomorfismo, definición 9.2, entre $\mathbb{R}$ y $(0, \infty)$ y la única solución de la ecuación $u(0)=1$ es $x=0$.
Demostración. Dadas las hipótesis.
De acuerdo con la definición 30.1, es claro que al evaluar la expresión (31.5) con $z=x\in\mathbb{R}$, la función $u(x) = \operatorname{exp}(x)$ es una función real de variable real. La continuidad de la función $u$ se sigue de la proposición 31.1(1), pues la exponencial compleja es una función entera y por tanto continua en $\mathbb{C}$, proposición 16.1, en particular es continua en $\mathbb{R}\subset\mathbb{C}$.
Por otra parte, de la proposición 31.1(4) sabemos que para todo $z\in\mathbb{C}$ se cumple que $\operatorname{exp}(z) \neq 0$, y por el inciso 2, de la misma proposición, para todo $z=x\in\mathbb{R}$ tenemos que: \begin{equation*} u(x) = \operatorname{exp}(x) = \operatorname{exp}\left(\frac{x}{2} + \frac{x}{2} \right) = \left[\operatorname{exp}\left(\frac{x}{2}\right)\right]^2 >0. \end{equation*}Dado que $u'(x) = u(x) > 0$, proposición 31.1(1), entonces se sigue del lema 31.1 que la función $u$ es estrictamente creciente en $\mathbb{R}$.
Como $u$ es continua y $\mathbb{R}$ es un conjunto conexo, entonces de la proposición 10.3 se sigue que $u(\mathbb{R}) = \operatorname{exp}(\mathbb{R}) \subset{\mathbb{R}}$ debe ser un conjunto conexo, por lo tanto, proposición 10.1, es un intervalo. Puesto que para todo $z=x\in\mathbb{R}$ se cumple que $u(x)>0$, entonces $u(\mathbb{R}) \subset (0, \infty)$.
Probemos la otra contención. De acuerdo con la definición de $u$, es claro que para $z = x>0$ se cumple que: \begin{equation*} u(x) = \operatorname{exp}(x) > 1 + x, \end{equation*}por lo que: \begin{equation*} \lim_{x \to\infty} u(x) = \infty. \tag{31.6} \end{equation*}Dado que para todo $z\in\mathbb{C}$ se cumple que $\operatorname{exp}(z) = 1/\operatorname{exp}(-z)$, proposición 31.1(5), entonces, para $z=t\in\mathbb{R}$ tal que $t<0$, es claro que: \begin{equation*} \lim_{t \to -\infty} u(t) = \lim_{-t \to \infty} \frac{1}{u(-t)} = \lim_{x \to\infty} \frac{1}{u(x)} = 0. \tag{31.7} \end{equation*}Sea $L>0$. De acuerdo con la definición del límite, de (31.6) se sigue que si $K=L>0$, entonces existe $M>0$ tal que: \begin{equation*} f(x) > K, \quad \text{si} \quad x>M. \end{equation*}En particular, para $x=M+1$ tenemos que $u(M+1) > L$.
Análogamente, considerando la definición del límite (31.7), si $\varepsilon=L>0$, entonces existe $N<0$ tal que: \begin{equation*} |u(x) – 0| = |u(x)| = u(x) < L, \quad \text{si} \quad x < N. \end{equation*}Entonces, para $x=N-1$ tenemos que $u(N-1) < L$. Por lo tanto, dado $L>0$ existen $a=N-1<0$ y $b = M+1>0$ tales que: \begin{equation*} u(a) < L < u(b). \end{equation*}Como $u$ es continua en $\mathbb{R}$, en particular lo es en $(a, b)$, entonces, del teorema del valor intermedio se sigue que existe $c\in(a, b)$ tal que $u(c) = L$, lo cual prueba la contención restante, por lo que $u(\mathbb{R}) = (0, \infty)$.
Dado que $u$ es estrictamente creciente, entonces, del lema 31.2 se sigue que es una función inyectiva. Por otra parte, del inciso anterior tenemos que $u:\mathbb{R} \to (0,\infty)$ es una función suprayectiva, por lo que $u$ es una función biyectiva y por tanto invertible. Denotamos a $u^{-1}(y)=x$ como la función inversa, entonces $u^{-1}$ es continua, lema 31.3, ya que $u$ es continua e inyectiva, por lo que $\mathbb{R}$ y $(0, \infty)$ son homeomorfos, definición 9.2.
Como $u$ es inyectiva es claro que la única solución de la ecuación $u(0)=1$ es $x=0$.
$\blacksquare$
Observación 31.2. De acuerdo con estos resultados, es claro que para $z=x\in\mathbb{R}$, la definición de la exponencial compleja dada en (31.5) se reduce al caso real dado por (31.1), por lo que de manera natural hemos hecho una extensión de la función exponencial real a $\mathbb{C}$, y como la serie que define a la exponencial converge absolutamente para todo $z\in\mathbb{C}$, entonces podemos utilizar las expresiones $e^z$ y $\operatorname{exp}(z)$ de manera indistinta para referirnos a la función exponencial compleja.
De nuestros cursos de cálculo, sabemos que las series de potencias de las funciones trigonométricas reales seno y coseno son: \begin{align*} \operatorname{sen}(x) = \sum_{n=0}^\infty \frac{(-1)^n x^{2n+1}}{(2n+1)!},\\ \operatorname{cos}(x) = \sum_{n=0}^\infty \frac{(-1)^n x^{2n}}{(2n)!}. \end{align*}
Notemos que si $z = iy \in\mathbb{C}$, con $y\in\mathbb{R}$, entonces: \begin{align*} \operatorname{exp}(iy) & = \sum_{n=0}^\infty \frac{(iy)^n}{n!}\\ & = 1 + iy – \frac{y^2}{2!} – i\frac{y^3}{3!} + \frac{y^4}{4!} + i \frac{y^5}{5!} – \frac{y^6}{6!} – i \frac{y^7}{7!} + \frac{y^8}{8!} + \cdots\\ & = \left( 1 – \frac{y^2}{2!} + \frac{y^4}{4!} – \frac{y^6}{6!} + \frac{y^8}{8!} – \cdots \right) + i \left( y – \frac{y^3}{3!} + \frac{y^5}{5!} – \frac{y^7}{7!} – \cdots \right)\\ & = \sum_{n=0}^\infty \frac{(-1)^n y^{2n}}{(2n)!} + i \sum_{n=0}^\infty \frac{(-1)^n y^{2n+1}}{(2n+1)!}\\ & = \operatorname{cos}(y) + i \operatorname{sen}(y). \end{align*}
De acuerdo con la proposición 31.1(3), para $z = x+ iy \in\mathbb{C}$ se tiene que: \begin{align*} e^z = \operatorname{exp}(z) & = \operatorname{exp}(x + iy)\\ & = \operatorname{exp}(x) \operatorname{exp}(iy)\\ & = e^x \left[ \operatorname{cos}(y) + i \operatorname{sen}(y)\right], \end{align*}lo cual justifica la definición 20.1 y por tanto todos los resultados de las entradas 20, 21, 22 y 23 son válidos.
De manera análoga, se puede utilizar la definición en series de potencias de la función exponencial compleja y las definiciones de las funciones trigonométricas e hiperbólicas, dadas en la entrada 22, para obtener sus correspondientes definiciones en series de potencias, que extienden de manera natural a $\mathbb{C}$ a sus versiones reales.
Proposición 31.2. (Series de las funciones trigonométricas e hiperbólicas seno y coseno.) Sea $z\in\mathbb{C}$, entonces: \begin{align*} \operatorname{sen}(z) := \sum_{n=0}^\infty \frac{(-1)^n z^{2n+1}}{(2n+1)!}, \tag{31.8} \\ \operatorname{cos}(z) := \sum_{n=0}^\infty \frac{(-1)^n z^{2n}}{(2n)!}, \tag{31.9}\\ \operatorname{senh}(z) := \sum_{n=0}^\infty \frac{z^{2n+1}}{(2n+1)!}, \tag{31.10} \\ \operatorname{cosh}(z) := \sum_{n=0}^\infty \frac{z^{2n}}{(2n)!}. \tag{31.11} \end{align*}
Demostración. La demostración es análoga para las cuatro funciones y se sigue de las definiciones 22.1, 22.3, 31.1 y de la proposición 27.2(1). Para ejemplificar el procedimiento realicemos la prueba de la serie de la función coseno hiperbólico y el resto de las series se dejan como ejercicio al lector.
De las definiciones 22.3 y 30.1, para todo $z\in\mathbb{C}$, por la proposición 27.2(1) tenemos que: \begin{align*} \operatorname{cosh}(z) & = \frac{\operatorname{exp}(z) + \operatorname{exp}(-z)}{2}\\ & = \dfrac{\displaystyle \sum_{n=0}^\infty \dfrac{z^n}{n!} + \displaystyle \sum_{n=0}^\infty \dfrac{(-z)^n}{n!}}{2}\\ & = \displaystyle \sum_{n=0}^\infty \dfrac{z^n + (-z)^n}{2 \cdot n!}\\ & = \displaystyle \sum_{n=0}^\infty \dfrac{z^n \left[1 + (-1)^n\right]}{2 \cdot n!}. \end{align*}
Sea $c_n = \dfrac{1 + (-1)^n}{2 \cdot n!}$, para todo $n\in\mathbb{N}$. Notemos que: \begin{equation*} c_n = \left\{ \begin{array}{lcc} 0 & \text{si} & n = 2k+1, \\ \\ \dfrac{1}{(2k)!} & \text{si} & n=2k, \end{array} \right. \end{equation*} donde $k\in\mathbb{N}$.
De manera análoga es posible deducir las series de potencias del resto de funciones trigonométricas e hiperbólicas, por lo que se deja como ejercicio al lector.
Observación 31.2. De estas definiciones para las funciones trigonométricas e hiperbólicas seno y coseno es claro que para todo $z\in\mathbb{C}$ se cumple que: \begin{equation*} \operatorname{sen}(-z) = -\operatorname{sen}(z) \quad \text{y} \quad \operatorname{cos}(-z) = \operatorname{cos}(z), \end{equation*} \begin{equation*} \operatorname{senh}(-z) = -\operatorname{senh}(z) \quad \text{y} \quad \operatorname{cosh}(-z) = \operatorname{cosh}(z), \end{equation*}ya que las series de potencias de las funciones $\operatorname{sen}$ y $\operatorname{senh}$ solo consideran a las potencias impares de $z$, mientras que las series de potencias de las funciones $\operatorname{cos}$ y $\operatorname{cosh}$ solo consideran potencias pares de $z$.
Observación 31.3. De acuerdo con las definiciones en series de las funciones hiperbólicas seno y coseno es claro que si restringimos el dominio de estas funciones al conjunto de los números reales positivos, entonces estas funciones serán positivas y estrictamente crecientes.
Más aún, por la observación 22.5, sabemos que para todo $z=x+iy\in\mathbb{C}$ se cumplen las identidades: \begin{align*} |\operatorname{sen}(z)|^2 = \operatorname{sen}^2(x) + \operatorname{senh}^2(y),\\ |\operatorname{cos}(z)|^2 = \operatorname{cos}^2(x) + \operatorname{senh}^2(y), \end{align*}de donde es claro que los únicos ceros de las series (31.8) y (31.9), que definen al seno y coseno complejos, son reales ya que $\operatorname{senh}(y) = 0$ si y solo si $y=0$.
Considerando las propiedades que hemos probado para las series de números complejos a lo largo de esta unidad, podemos probar fácilmente algunas de las identidades con las que estamos familiarizados para el caso real, mediante la manipulación algebraica de las series de potencias que definen a las funciones trigonométricas e hiperbólicas.
Ejemplo 31.1. Verifiquemos que para todo $z\in\mathbb{C}$ se cumple que: a) \begin{equation*} \operatorname{cos}^2(z) = \frac{1+\operatorname{cos}(2z)}{2}. \end{equation*} b) \begin{equation*} \operatorname{sen}(2z) = 2 \operatorname{sen}(z)\operatorname{cos}(z). \end{equation*}
Entonces: \begin{equation*} \frac{1+\operatorname{cos}(2z)}{2} = \frac{1}{2} + \sum_{n=0}^\infty \frac{i^{2n} \, 2^{2n-1} \, z^{2n}}{(2n)!} = \operatorname{cos}^2(z). \end{equation*}b) De acuerdo con el inciso anterior tenemos que: \begin{equation*} \operatorname{cos}^2(z) = \frac{1}{2} + \sum_{n=0}^\infty \frac{i^{2n} \, 2^{2n-1} \, z^{2n}}{(2n)!}, \end{equation*}la cual es una serie con radio de convergencia infinito.
Por otra parte, por la proposición 22.1 sabemos que para todo $z\in\mathbb{C}$ se cumple que: \begin{align*} \operatorname{sen}(z) = \operatorname{sen}(z_0+z-z_0) = \operatorname{sen}(z_0) \operatorname{cos}(z-z_0) + \operatorname{sen}(z-z_0) \operatorname{cos}(z_0),\\ \operatorname{cos}(z) = \operatorname{cos}(z_0+z-z_0)= \operatorname{cos}(z_0) \operatorname{cos}(z-z_0) – \operatorname{sen}(z_0) \operatorname{sen}(z-z_0). \end{align*}
Ejemplo 31.3. Determinemos el radio de convergencia y la suma de la serie: \begin{equation*} \sum_{n=2}^\infty \frac{n}{(n-2)!} z^n. \end{equation*}
Solución. Por la forma de la serie, al tener un factorial en el denominador, inferimos que la función suma que describe la serie dada debe estar en términos de la exponencial compleja.
Sabemos que la serie de potencias, centrada en $z_0 = 0$, de la exponencial es: \begin{equation*} f(z) = e^z = \sum_{n=0}^\infty \frac{z^n}{n!}, \quad \forall z\in\mathbb{C}, \end{equation*}entonces, al derivar dos veces de ambos lados de la igualdad, por el corolario 30.1 tenemos que: \begin{equation*} f»(z) = e^z = \sum_{n=2}^\infty \frac{n(n-1) z^{n-2}}{n!}= \sum_{n=2}^\infty \frac{z^{n-2}}{(n-2)!}, \quad \forall z\in\mathbb{C}. \end{equation*}
Por lo que $c_0 = c_1 =0$ y para todo $k\geq 2$: \begin{equation*} c_k = \dfrac{1}{(k-2)!}. \end{equation*}
Considerando lo anterior no es difícil verificar que esta última serie tiene radio de convergencia infinito, por lo que podemos volver a aplicar la proposición 30.2 y derivar de ambos lados de la igualdad, de donde se sigue que: \begin{align*} \frac{d}{dz} z^2 e^z = 2ze^z + z^2 e^z & = \sum_{k=1}^\infty k c_k z^{k-1}\\ & = \sum_{n=2}^\infty \frac{n z^{n-1}}{(n-2)!}, \quad \forall z\in\mathbb{C}. \end{align*}
Por último, si multiplicamos por $z$ ésta última igualdad tenemos que: \begin{equation*} e^z(2z^2 + z^3) = \sum_{n=2}^\infty \frac{n z^{n}}{(n-2)!}, \quad \forall z\in\mathbb{C}, \end{equation*}la cual es la función suma correspondiente a la serie dada y tiene también radio de convergencia infinito.
Para cerrar esta entrada analicemos ahora a la función multivaluada logaritmo complejo, para ello consideremos el siguiente:
Ejemplo 31.4. Veamos que la serie de potencias para la función $\operatorname{Log}(1+z)$ es: \begin{equation*} \sum_{n=0}^\infty \frac{(-1)^n z^{n+1}}{n+1}, \end{equation*}y determinemos su dominio de convergencia.
Solución. De acuerdo con el ejercicio 10 de la entrada 21, sabemos que la función $\operatorname{Log}(1+z)$ es analítica en $\mathbb{C}\setminus(-\infty, -1]$ y para todo punto en dicho dominio su derivada es: \begin{equation*} \frac{d}{dz} \operatorname{Log}(1+z) = \frac{1}{1+z}. \tag{31.12} \end{equation*}
En particular, dicha función es analítica en $B(0,1)$ y para $|z|<1$ se cumple (31.12).
Por otra parte, considerando la serie geométrica, tenemos que: \begin{equation*} \sum_{n=0}^\infty (-z)^n = \sum_{n=0}^\infty (-1)^n z^n = \frac{1}{1+z}, \quad \text{si} \,\, |z|<1. \end{equation*}
Notemos que si definimos a una función $f$ considerando la serie de potencias dada, tenemos que: \begin{equation*} f(z) = \sum_{n=0}^\infty \frac{(-1)^n z^{n+1}}{n+1} = \sum_{k=0}^\infty c_k z^k, \end{equation*}de donde: \begin{equation*} c_k = \left\{ \begin{array}{lc} \dfrac{(-1)^{n}}{n+1}, & \text{si existe} \,\, n\in\mathbb{N} \,\, \text{tal que} \,\, k = n+1,\\ \\ 0, & \text{en otro caso.}\\ \end{array} \right. \end{equation*}
Por lo que, $c_0 = 0$ y para $k\geq 1$ se tiene que: \begin{equation*} c_k = \frac{(-1)^{k-1}}{k}. \end{equation*}
Es claro que para $k\geq 1$ se tiene que $c_k \neq 0$ y como: \begin{equation*} \lambda = \lim_{k\to\infty} \frac{|c_{k+1}|}{|c_{k}|} = \lim_{k\to\infty} \left|\frac{k (-1)^{k}}{(k+1) (-1)^{k-1}}\right| = \lim_{k\to\infty} \frac{k}{k+1} = 1, \end{equation*}entonces, del corolario 29.3 se sigue que $R = 1/ \lambda = 1$, es decir, la serie que define a $f$ tiene radio de convergencia 1, por lo que su dominio de convergencia es el disco $B(0,1)$.
Lo anterior nos garantiza que tanto $f(z)$ como $\operatorname{Log}(1+z)$ están bien definidas en el disco abierto $B(0,1)$.
De acuerdo con la proposición 30.2 y la definición 30.1, tenemos que $f$ es analítica en $B(0,1)$ y su derivada es: \begin{align*} f'(z) & = \sum_{k=1}^\infty k c_k z^{k-1}\\ & = \sum_{k=1}^\infty k \left(\frac{(-1)^{k-1}}{k}\right) z^{k-1}\\ & = \sum_{n=0}^\infty (-1)^n z^{n}\\ & = \frac{1}{1+z}, \quad \text{si} \,\, |z|<1. \end{align*}
Sea $g(z) = f(z) – \operatorname{Log}(1+z)$. Claramente $g$ es analítica en $B(0,1)$ y su derivada es: \begin{equation*} g'(z) = \dfrac{d}{dz} \left [f(z) – \operatorname{Log}(1+z)\right] = 0, \quad \forall z\in B(0,1), \end{equation*}por lo que $g$ es una función constante en $B(0,1)$, proposición 19.2. Para $z=0$ tenemos que: \begin{equation*} g(0) = f(0) – \operatorname{Log}(1+0) = 0, \end{equation*}entonces: \begin{equation*} f(z) – \operatorname{Log}(1+z) = 0 \quad \Longrightarrow \quad f(z) = \operatorname{Log}(1+z). \end{equation*}
Por lo tanto: \begin{equation*} \operatorname{Log}(1+z) = \sum_{n=0}^\infty \frac{(-1)^n z^{n+1}}{n+1}, \quad \text{si} \,\, |z|<1. \end{equation*}
Observación 31.4. Notemos que si sustituimos a $z$ por $z-1$ en el resultado anterior, entonces: \begin{equation*} \operatorname{Log}(z) = \sum_{n=0}^\infty \frac{(-1)^n (z-1)^{n+1}}{n+1}, \quad \text{si} \,\, |z-1|<1. \end{equation*}
Tarea moral
Prueba los lemas 31.1, 31.2 y 31.3.
Completa la demostración de la proposición 31.1.
Completa la demostración de la proposición 31.2.
Utilizando las definiciones en series de potencias de las funciones seno y coseno prueba la identidad Pitagórica $\operatorname{sen}^2(z) + \operatorname{cos}^2(z) = 1$ para todo $z\in\mathbb{C}$.
Determina la serie de potencias de la función $\operatorname{Log}\left(\dfrac{1}{1-z}\right)$ y determina su región de convergencia.
Hint: Recuerda que para la rama principal del logaritmo se cumple que $\operatorname{Log}\left(w^{-1}\right) = -\operatorname{Log}(w)$ si $w\in\mathbb{C}\setminus(-\infty,0]$.
a) Considera el desarrollo en serie de potencias para la función $f(z) = \operatorname{Log}(z)$ dado en la observación 31.4 y muestra que $f'(z) = 1/z$.
b) Sea $z_0 \neq 0$. Para $z \in B(z_0, 1)$ define a la función: \begin{equation*} f(z) = \displaystyle\sum_{n=0}^\infty \dfrac{(-1)^{n-1}}{n} \left(\dfrac{z-z_0}{z_0}\right)^n. \end{equation*} Muestra que $f'(z) = 1/z$.
Determina la función suma y el dominio de convergencia de las siguientes series de potencias. a) $\displaystyle \sum_{n=0}^\infty \frac{(-1)^{n+1}}{n!} z^{3n}$. b) $\displaystyle \sum_{n=1}^\infty \frac{z^{2n+1}}{(2n-1)!}$. c) $\displaystyle \sum_{n=0}^\infty \frac{2^{n+1}(z-i)^{n+2}}{(n+1)!}$.
Se definen a los números de Bernoulli $B_n$ a través de la serie de potencias: \begin{equation*} \frac{z}{e^z -1} = \displaystyle \sum_{n=0}^\infty \frac{B_n}{n!} z^n. \end{equation*}a) Prueba la fórmula recursiva: \begin{equation*} \frac{B_0}{n! \, 0!} + \frac{B_1}{(n-1)! \, 1!} + \cdots + \frac{B_{n-1}}{1! \, (n-1)!} = \left\{ \begin{array}{lcc} 1 & \text{si} & n=1, \\ \\ 0 & \text{si} & n>1. \end{array} \right. \end{equation*}Entonces $B_0=1$.
b) Calcula $B_1$, $B_2$, $B_3$, $B_4$.
c) Muestra que $B_n=0$ si $n$ es un número impar distinto de $1$.
Define a la función $f:\mathbb{R} \to \mathbb{R}$ como: \begin{equation*} f(x) = \left\{ \begin{array}{lcc} 0 & \text{si} & x\leq 0, \\ \\ e^{-1/x} & \text{si} & x>0. \end{array} \right. \end{equation*}Muestra que $f$ es infinitamente diferenciable y que $f^{(n)}=0$ para todo $n\in\mathbb{N}$.
Más adelante…
Esta entrada es la última de la tercera unidad, correspondiente al tema de series de números complejos. En ella hemos abordado de manera general algunas de las funciones complejas elementales vistas como series de potencias, cabe mencionar que muchas de las propiedades referentes a estas funciones las hemos estudiado a detalle en la segunda unidad. Es importante notar que muchas de las definiciones dadas en esta entrada coinciden con las definiciones de estas funciones como series para el caso real, por lo que resulta natural la extensión de estas funciones al caso complejo.
En la siguiente entrada iniciamos con la cuarta unidad, correspondiente con el tema de integración compleja, en la cual veremos algunos de los resultados más importantes para las funciones complejas que sin duda son fundamentales en la teoría de la variable compleja en sí, mismos que nos permitirán caracterizar de manera clara a las funciones complejas y distinguirlas de las funciones reales.
Las funciones vistas como series de potencias tienen un comportamiento bueno, en el sentido de que son funciones continuas y diferenciables, aunque aquí es donde radica una propiedad importante y es que la derivada de una serie de potencias es también una serie de potencias, por lo que resultará que las funciones dadas como series de potencias son infinitamente diferenciables.
Por el corolario 16.1 tenemos que la derivada de un polinomio complejo, digamos: \begin{equation*} p(z) = c_0 + c_1 z + \cdots + c_n z^n, \end{equation*}está dada por el polinomio complejo: \begin{equation*} p'(z) = c_1 + 2c_2 z + \cdots + n c_n z^{n-1}. \end{equation*}Intuitivamente, esto nos dice que la función suma $f$, definición 28.6, dada por una serie de potencias, es decir: \begin{equation*} f(z) = \sum_{n=0}^\infty c_n z^n, \tag{30.1} \end{equation*}debería tener como derivada: \begin{equation*} f'(z) = \sum_{n=0}^\infty n c_n z^{n-1}. \end{equation*}Si esto se cumple, entonces tendríamos que $f$ sería una función diferenciable término a término, pero ¿cuándo es posible esto? Para responder esta pregunta recurriremos a los conceptos de la entrada anterior sobre lo que es una serie de potencias así como los conceptos de convergencia de series de números complejos y de series de funciones vistos en las entradas anteriores, pues como veremos a continuación, para que la función suma $f$ propuesta en (30.1) satisfaga lo anterior, bastará con que la serie de potencias que la define sea convergente en algún dominio.
Proposición 30.1. (Continuidad de una serie de potencias.) Sea $\displaystyle\sum_{n=0}^\infty c_n (z-z_0)^n$ una serie de potencias con radio de convergencia $R>0$ y disco de convergencia $B(z_0,R)$. Definimos: \begin{equation*} f(z) := \sum_{n=0}^\infty c_n (z-z_0)^n, \quad \forall z\in B(z_0, R). \end{equation*}Entonces $f$ es continua en $B(z_0,R)$.
Dado que la serie converge uniformemente en $\overline{B}(a, r)$, proposición 29.2, y para cada $n\in\mathbb{N}$ la función $f_n(z) = c_n(z-z_0)^n$ es continua en $\mathbb{C}$, entonces se sigue del corolario 28.2 que $f$ es continua en $\overline{B}(a, r)$.
Como $a$ es un punto interior de $\overline{B}(a, r)$, entonces $f$ es continua en $a \in B(z_0, R)$. Dado que $a$ era aribitrario, entonces $f$ es continua en $B(z_0, R)$.
$\blacksquare$
Lema 30.1. Sea $\displaystyle\sum_{n=0}^\infty c_n (z-z_0)^n$ una serie de potencias con radio de convergencia $R>0$. Entonces la serie de potencias: \begin{equation*} \displaystyle\sum_{n=1}^\infty n c_n z^{n-1}, \end{equation*}tiene el mismo radio de convergencia $R>0$.
En general, para cada $k\geq 1$ la serie de potencias: \begin{equation*} \sum_{n=k}^\infty n(n-1)\cdots (n-k+1) c_n z^{n-k} = \sum_{n=k}^\infty \frac{n!}{(n-k)!} c_n z^{n-k}, \end{equation*}también tiene el mismo radio de convergencia $R>0$.
Demostración. Sin pérdida de generalidad probaremos el resultado para $z_0 = 0$.
El resultado general se sigue fácilmente al aplicar inducción sobre $k$, por ejemplo, el caso cuando $k=2$ se obtiene al aplicar el resultado para $k=1$ a la serie $\displaystyle\sum_{n=1}^\infty n c_n z^{n-1}$, por lo que esta última parte del resultado se deja como ejercicio al lector.
Dadas las hipótesis, procedemos entonces a probar el caso cuando $k=1$. Para $z\in B(0,R)$, tomamos $r = \dfrac{|\,z\,|+R}{2}>0$, tal que $|\,z\,|<r<R$, entonces del lema de Abel se sigue que la serie $\displaystyle \sum_{n=0}^\infty c_n r^n$ converge absolutamente, por lo que existe $K>0$ tal que $|\,c_n r^n\,|\leq K$ para todo $n\in\mathbb{N}$. Sea: \begin{equation*} q := \frac{|\,z\,|}{r} < 1, \end{equation*}entonces: \begin{equation*} |\,n c_n z^{n-1}\,| = n \, |\,c_n \,| \left|\, \frac{z}{r}\,\right|^{n-1} r^{n-1} \leq \frac{nK}{r} q^{n-1}, \quad \forall n\geq 1. \end{equation*}Dado que $0\leq q < 1$, tenemos que: \begin{equation*} \lim_{n\to\infty} \dfrac{\dfrac{(n+1)Kq^n}{r}}{\dfrac{nK q^{n-1}}{r}} = q \lim_{n\to\infty} \left(1+\dfrac{1}{n}\right) = q < 1, \end{equation*}por lo que la serie $\displaystyle\sum_{n=1}^\infty n K q^{n-1} r^{-1}$ converge, entonces la serie $\displaystyle\sum_{n=0}^\infty |\,n c_n z^{n-1} \, |$ converge, proposición 27.4(1), y por tanto, proposición 27.3, la serie $\displaystyle\sum_{n=1}^\infty n c_n z^{n-1}$ converge.
Por último, notemos que si $|\,z\,|>R$, entonces la serie $\displaystyle \sum_{n=0}^\infty |c_n z^n|$ diverge ya que la serie $\displaystyle \sum_{n=0}^\infty c_n z^n$ diverge y dado que: \begin{equation*} \left|\,n c_n z^{n-1}\,\right| \geq \frac{|c_n z^n|}{|\,z\,|}, \quad \forall n\geq 1, \end{equation*}entonces, proposición 27.4(2), la serie $\displaystyle \sum_{n=1}^\infty n c_n z^{n-1}$ diverge.
Por lo tanto, dichas series tienen el mismo radio de convergencia.
$\blacksquare$
Observación 30.1. Sean $z, z_0 \in\mathbb{C}$ distintos. Notemos que para todo $n\geq 2$ se cumple que:\begin{equation*} \frac{z^n – z_0^n}{z – z_0} – n z_0^{n-1} = (z-z_0)\sum_{m=1}^{n-1} m z_0^{m-1} z^{n-m-1}. \end{equation*}
Proposición 30.2. Sean $z_0\in\mathbb{C}$ fijo y $f:B(z_0, R) \to \mathbb{C}$ una función dada por la serie de potencias: \begin{equation*} f(z) = \displaystyle \sum_{n=0}^\infty c_n (z-z_0)^n, \end{equation*}con radio de convergencia $R>0$. Entonces $f$ puede diferenciarse término a término dentro de su dominio de convergencia, es decir: \begin{equation*} f'(z) = \sum_{n=1}^\infty n c_n (z-z_0)^{n-1}. \end{equation*}
Demostración. Sin pérdida de generalidad probaremos el resultado para $z_0 = 0$, ya que en otro caso basta con que consideremos a la función: \begin{equation*} F(z) = \sum_{n=0}^\infty c_n z^{n}, \end{equation*}la cual cumple que $f(z) = F(z-z_0)$, entonces $f$ es diferenciable si y solo si lo es la función $F$ y las derivadas de $f$ en $z_0$ son las derivadas de $F$ en $0$.
Dadas las hipótesis, por el lema anterior tenemos que la serie $g(z) = \displaystyle\sum_{n=1}^\infty n c_n z^{n-1}$ es absolutamente convergente para $|\,z\,| < R$.
Veamos que para $z_0\in B(0,R)$ se cumple que: \begin{equation*} f'(z_0) = \lim_{z \to z_0} \frac{f(z) – f(z_0)}{z – z_0} = g(z_0), \end{equation*}o equivalentemente que: \begin{equation*} \lim_{z \to z_0} \left[ \frac{f(z) – f(z_0)}{z – z_0} – g(z_0)\right] = 0. \end{equation*}Una vez fijo $z_0\in B(0,R)$, tomemos $r=\dfrac{|\,z_0\,|+R}{2}$, entonces $|\,z_0\,|<r<R$ y sea $z\in B(0,r)\setminus\{z_0\}$. Dado que las series que definen a las funciones $f$ y $g$ son convergentes, entonces de la proposición 27.2 y la observación 30.1 tenemos que: \begin{align*} \frac{f(z) – f(z_0)}{z – z_0} – g(z_0) & = \dfrac{\displaystyle \sum_{n=0}^\infty c_n z^n – \displaystyle\sum_{n=0}^\infty c_n z_0^n}{z – z_0} – \sum_{n=1}^\infty n c_n z_0^{n-1}\\ & = \sum_{n=0}^\infty c_n \left(\frac{z^n – z_0^n}{z – z_0}\right) – \sum_{n=1}^\infty n c_n z_0^{n-1}\\ & = \sum_{n=1}^\infty c_n \left( \frac{z^n – z_0^n}{z – z_0} – n z_0^{n-1} \right)\\ & = \sum_{n=2}^\infty c_n \left( \frac{z^n – z_0^n}{z – z_0} – n z_0^{n-1} \right)\\ & = \sum_{n=2}^\infty c_n (z-z_0)\sum_{m=1}^{n-1} m z_0^{m-1} z^{n-m-1}. \end{align*}Dado que $z, z_0 \in B(0,r)$, entonces se cumple que: \begin{align*} \left| (z-z_0)\sum_{m=1}^{n-1} m z_0^{m-1} z^{n-m-1} \right| & \leq |\,z-z_0\,| \sum_{m=1}^{n-1} m |z_0|^{m-1} |z|^{n-m-1}\\ & < |z-z_0| \, r^{n-2} \sum_{m=1}^{n-1} m\\ & = |z-z_0| \, r^{n-2} \left( \frac{n(n-1)}{2}\right). \end{align*}Por lo que: \begin{equation*} \left|\frac{f(z) – f(z_0)}{z – z_0} – g(z_0)\right| < \frac{|\,z-z_0\,|}{2} \sum_{n=2}^\infty n(n-1)|c_n| r^{n-2}, \quad \forall z\in B^*(0,r). \end{equation*}Por el lema 30.1 tenemos que la series: \begin{equation*} \sum_{n=0}^\infty c_n z^n \quad \text{y} \quad \sum_{n=2}^\infty n(n-1) c_n z^{n-2}, \end{equation*}tienen el mismo radio de convergencia, es decir, $R>0$, y en particular ambas son absolutamente convergentes. Puesto que $r<R$, entonces la serie $\displaystyle \sum_{n=2}^\infty n(n-1)|c_n| r^{n-2}$ converge. Por lo tanto, dado que $z\in B(0,r)\setminus\{z_0\}$ al tomar el límite tenemos: \begin{equation*} \lim_{z\to z_0} \left|\frac{f(z) – f(z_0)}{z – z_0} – g(z_0)\right| < \lim_{z\to z_0} \frac{|\,z-z_0\,|}{2} \sum_{n=2}^\infty n(n-1)|c_n| r^{n-2} = 0, \end{equation*}de donde se sigue el resultado.
$\blacksquare$
Ejemplo 30.2. Estudiemos la convergencia de la serie: \begin{equation*} \sum_{n=1}^\infty \frac{n}{5^n}(z-i)^{n-1}. \end{equation*}Solución. Notemos que dicha serie resulta de derivar a la serie: \begin{equation*} \sum_{n=0}^\infty \frac{1}{5^n}(z-i)^{n}, \end{equation*} la cual es una serie geométrica convergente si: \begin{equation*} \left| \frac{z-i}{5}\right|<1 \quad \Longleftrightarrow \quad |z-i|<5, \end{equation*} es decir, su dominio de convergencia es el disco $B(i,5)$. Entonces, de la proposición 30.2, al ser una serie geométrica, se sigue que ambas series tienen el mismo dominio de convergencia.
Por último, para obtener la suma de la serie dada tenemos que: \begin{align*} f(z) & = \sum_{n=0}^\infty \frac{1}{5^n}(z-i)^{n}\\ & = \dfrac{1}{1- \dfrac{z-i}{5}}\\ & = \dfrac{5}{5+i-z}, \quad \forall z \in B(i,5), \end{align*}por lo que:\begin{align*} f'(z) &= \sum_{n=1}^\infty \frac{n}{5^n}(z-i)^{n-1}\\ & = \dfrac{5}{(5+i-z)^2}, \quad \forall z \in B(i,5). \end{align*}
Observación 30.2. Aunque una serie de potencias y su derivada tienen el mismo radio de convergencia, es importante hacer énfasis en que su dominio de convergencia no necesariamente es el mismo.
Ejemplo 30.3. Consideremos a las series: \begin{equation*} \displaystyle\sum_{n=1}^\infty\dfrac{z^n}{n} \quad \text{y} \quad \displaystyle\sum_{n=1}^\infty z^{n-1}. \end{equation*}De acuerdo con el ejercicio 7(a) de la entrada anterior, sabemos que la primera serie de potencias tiene radio de convergencia $R=1$ y su dominio de convergencia es el conjunto: \begin{equation*} \overline{B}(0,1) \setminus\{1\} = \left\{z\in\mathbb{C} : |\,z\,|\leq 1 \,\, \text{y} \,\, z\neq 1 \right\}. \end{equation*}Mientras que la segunda serie, que es su derivada, también tiene radio de convergencia $R=1$, pero al ser una serie geométrica su dominio de convergencia es el disco abierto $B(0,1)$, que es distinto al dominio de la primera serie.
Corolario 30.1 (Existencia de las derivadas de todos los órdenes de una serie de potencias.) Sean $z_0\in\mathbb{C}$ fijo y $f:B(z_0, R) \to \mathbb{C}$ una función dada por la serie de potencias: \begin{equation*} f(z) = \displaystyle \sum_{n=0}^\infty c_n (z-z_0)^n, \end{equation*}con radio de convergencia $R>0$. Entonces todas las derivadas de orden superior de $f$, es decir: \begin{equation*} f’, f^{(2)}, f^{(3)}, \ldots, f^{(k)}, \ldots \end{equation*}existen para todo $z$ en su dominio de convergencia y dichas derivadas están dadas por: \begin{align*} f^{(k)}(z) & = \sum_{n=k}^\infty n(n-1)\cdots (n-k+1) c_n (z-z_0)^{n-k}\\ & = \sum_{n=k}^\infty \frac{n!}{(n-k)!} c_n (z-z_0)^{n-k}. \end{align*}En particular: \begin{equation*} c_k = \frac{f^{(k)}(z_0)}{k!}, \quad k\in\mathbb{N}. \end{equation*}
Demostración. Se deja como ejercicio al lector.
$\blacksquare$
Corolario 30.2. (Unicidad del desarrollo en series de potencias.) Sean $R>0$ y $z_0 \in \mathbb{C}$ fijo. Si para todo $z\in\mathbb{C}$ tal que $|z-z_0|<R$ se cumple que: \begin{equation*} \displaystyle \sum_{n=0}^\infty a_n (z-z_0)^n = \displaystyle \sum_{n=0}^\infty b_n (z-z_0)^n, \end{equation*}entonces $a_n = b_n$ para todo $n\in\mathbb{N}$. En particular, si $\displaystyle \sum_{n=0}^\infty c_n (z-z_0)^n = 0$, entonces $c_n = 0$ para todo $n\in\mathbb{N}$.
Demostración. Se deja como ejercicio al lector.
$\blacksquare$
Ejemplo 30.4. Para todo $|\,z\,|<1$ definimos a la función: \begin{equation*} f(z) = \displaystyle \sum_{n=0}^\infty z^n = \frac{1}{1-z}. \end{equation*}De acuerdo con el corolario 30.1, derivando repetidamente y cambiando los índices de las sumas, es fácil verificar que para todo $k\in\mathbb{N}$ y todo $|\,z\,|<1$ se cumple que: \begin{equation*} f^{(k)}(z) = \displaystyle \sum_{n=0}^\infty (n+k)(n+k-1) \cdots (n+1) z^n = \frac{k!}{(1-z)^{k+1}}. \end{equation*}Entonces, para todo $|\,z\,|<1$: \begin{align*} f'(z) &= \frac{1}{(1-z)^2} = \displaystyle \sum_{n=0}^\infty (n+1) z^n,\\ f»(z) &= \frac{2}{(1-z)^3} = \displaystyle \sum_{n=0}^\infty (n+2)(n+1) z^n,\\ f^{(3)} &= \frac{6}{(1-z)^4} = \displaystyle \sum_{n=0}^\infty (n+3)(n+2)(n+1) z^n. \end{align*}Además: \begin{equation*} f^{(k)}(0) = k! \quad \Longrightarrow \quad c_k = 1, \quad \forall k\in\mathbb{N}. \end{equation*}
Ejemplo 30.5. Determinemos la función suma y el dominio de convergencia de la siguiente serie: \begin{equation*} \displaystyle \sum_{n=0}^\infty n^2 z^n. \end{equation*}
Solución. Notemos que para todo $n\in\mathbb{N}$ se cumple que: \begin{equation*} n^2 = (n+2)(n+1)-3(n+1)+1. \end{equation*}De acuerdo con el ejemplo anterior, tenemos que para $|\,z\,|<1$ las series: \begin{equation*} \displaystyle \sum_{n=0}^\infty z^n, \quad \displaystyle \sum_{n=0}^\infty (n+1) z^n \quad \text{y} \quad \displaystyle \sum_{n=0}^\infty (n+2)(n+1) z^n, \end{equation*}son convergentes, entonces, de la proposición 27.2(2) se sigue: \begin{align*} \displaystyle \sum_{n=0}^\infty n^2 z^n & = \displaystyle \sum_{n=0}^\infty \left[(n+2)(n+1)-3(n+1)+1\right] z^n\\ & = \displaystyle \sum_{n=0}^\infty (n+2)(n+1) z^n – 3 \displaystyle \sum_{n=0}^\infty (n+1) z^n + \displaystyle \sum_{n=0}^\infty z^n\\ & = \frac{2}{(1-z)^3} – \frac{3}{(1-z)^2} + \frac{1}{1-z}\\ & = \frac{z^2 + z}{(1-z)^3}. \end{align*}Por lo tanto, para todo $z\in B(0,1)$ la función suma de la serie dada es: \begin{equation*} f(z) = \frac{z^2 + z}{(1-z)^3}. \end{equation*}
Definición 30.1. (Funciones par e impar.) Sea $f(z) = \displaystyle \sum_{n=0}^\infty c_n z^n$ una serie con radio de convergencia $R>0$. Se define a la serie: \begin{equation*} f(-z) = \displaystyle \sum_{n=0}^\infty c_n (-z)^n = \displaystyle \sum_{n=0}^\infty (-1)^n c_n z^n. \end{equation*}Se dice que $f$ es par si $c_n=0$ para todo $n$ impar y que $f$ es impar si $c_n=0$ para todo $n$ par.
Ejemplo 30.6. De acuerdo con la definición 30.1, veamos que $f$ es par si y solo si $f(-z) = f(z)$.
Solución. Dadas las hipótesis tenemos lo siguiente.
$\Rightarrow)$ Si $f$ es par, tenemos que $c_n = 0$ para todo $n$ impar. Además $(-1)^n = 1$ si $n$ es par, entonces: \begin{equation*} f(-z) = \displaystyle \sum_{n=0}^\infty (-1)^n c_n z^n = \displaystyle \sum_{n \, \, \text{par}} (-1)^n c_n z^n = \displaystyle \sum_{n \, \, \text{par}} c_n z^n = f(z). \end{equation*}
$(\Leftarrow$ Si $f(-z) = f(z)$ entonces: \begin{equation*} \displaystyle \sum_{n=0}^\infty (-1)^n c_n z^n = \displaystyle \sum_{n=0}^\infty c_n z^n. \end{equation*}De acuerdo con el ejercicio 8(d) de la entrada anterior, tenemos que ambas series tienen el mismo radio de convergencia, por lo que ambas son series convergentes, entonces: \begin{equation*} \displaystyle \sum_{n=0}^\infty \left[ 1- (-1)^n\right] c_n z^n = 0. \end{equation*}Como $1 – (-1)^n = 2$ si $n$ es impar tenemos que: \begin{equation*} \displaystyle \sum_{n \, \, \text{impar}} 2 c_n z^n = 0, \end{equation*}entonces, corolario 30.2, $c_n = 0$ para todo $n$ impar.
$\blacksquare$
Ejemplo 30.7. Determinemos la serie de potencias y el dominio de convergencia de la función: \begin{equation*} f(z) = \frac{1}{(1-z)(2-z)}. \end{equation*}
En este punto es crucial que recordemos la observación 16.4 en la cual mencionamos que es posible definir de manera equivalente el concepto de función analítica a través del desarrollo en serie de potencias, ya que de acuerdo con el corolario 30.1 tenemos que una función dada a través de una serie de potencias es infinitamente diferenciable
Definición 30.2. (Función analítica.) Sea $U \subset \mathbb{C}$ un conjunto abierto. Una función $f: U \to \mathbb{C}$ es analítica en $U$ si y solo si para cada $z_0\in U$ existe una sucesión de números complejos $\{c_n\}_{n\geq 0} \subset U$ y un número real $r>0$ tal que: \begin{equation*} f(z) = \sum_{n=0}^{\infty} c_n (z-z_0)^n, \quad \forall z\in B(z_0, r). \end{equation*}
Observación 30.3. Notemos que en la definición 30.2 no hemos asumido que $B(z_0, r)$ es necesariamente el mayor disco de convergencia en $U$ con centro en $z_0$. Además, los números $c_0, c_1, \ldots,$ en $U$ dependen de $z_0$.
Observación 30.4. Debe ser claro que una consecuencia inmediata de la definición 30.2 es que una función analítica $f$ hereda todas las propiedades locales de una serie de potencias como las operaciones entre series, entre otras propiedades importantes estudiadas en la unidad anterior.
Corolario 30.3. Sean $f$ y $g$ dos funciones analíticas en algún dominio $D$ y $c\in\mathbb{C}$ una constante. Entonces $c f$, $f + g$ y $f g$ son funciones analíticas en $D$. Más aún, la suma finita, el producto finito y las combinaciones lineales finitas de funciones analíticas son también analíticas.
Demostración. Se sigue de la definición anterior y de las propiedades de las series vistas en la entrada 27.
$\blacksquare$
Ejemplo 30.7. Si $p:\mathbb{C}\to\mathbb{C}$ es un polinomio complejo, entonces $p$ una función analítica en $\mathbb{C}$.
Verificar este hecho es sencillo si consideramos que para todo $n\in\mathbb{N}$ se cumple que $z^n=(z-z_0+z_0)^n$, con $z_0\in\mathbb{C}$ fijo y utilizamos la fórmula binomial: \begin{equation*} (z+z_0)^n = \sum_{k=0}^n \frac{n!}{k!(n-k)!} z^k z_0^{n-k}, \end{equation*}por lo que se deja como ejercicio al lector.
Asimismo cada función racional, digamos $r=p/q$, donde $p$ y $q$ son dos polinomios complejos, es analítica en $\mathbb{C}\setminus Q$, con $Q$ el conjunto de los ceros del polinomio $q$.
Ejemplo 30.8. Sea $U = \mathbb{C} \setminus\{1\}$. Definimos a la función $f:U \to \mathbb{C}$ como: \begin{equation*} f(z) = \frac{1}{1-z}. \end{equation*}Veamos que $f$ es analítica de acuerdo con la definición 30.2.
Solución. Sabemos que para todo $z \in B(0,1)$ y $z_0 = 0$ podemos ver a $f$ como la serie geométrica: \begin{equation*} f(z) = \frac{1}{1-z} = \sum_{n=0}^\infty z^n. \end{equation*}Sea $z_0 \in U$, entonces tenemos que: \begin{align*} f(z) = \dfrac{1}{1-z} & = \dfrac{1}{1-z_0} \left(\dfrac{1}{1-\dfrac{z-z_0}{1-z_0}}\right)\\ &= \dfrac{1}{1-z_0} \, \displaystyle \sum_{n=0}^\infty \left(\frac{z-z_0}{1-z_0}\right)^n\\ & = \sum_{n=0}^\infty \frac{(z-z_0)^n}{(1-z_0)^{n+1}}, \end{align*}para todo $z\in B(z_0, r) \subset U$, donde $r=|1-z_0|$.
Por lo tanto, $f$ es analítica en $U$.
Tarea moral
Demuestra los corolarios 30.1 y 30.2.
Completa la demostración del lema 30.1.
Verifica la observación 30.1.
Sea $f$ una función analítica en un dominio $D$ y supón que: \begin{equation*} f(z_1) = f(z_2) = \cdots = f(z_n) = w, \end{equation*}para distintos puntos $z_1, z_2, \ldots, z_n \in D$. Muestra que: \begin{equation*} F(z) = \frac{f(z) – w}{(z-z_1) \cdots (z-z_n)}, \end{equation*}es una función analítica en $D$ con una definición adecuada de $F$ en $z_1, z_2, \ldots, z_n \in D$.
Sea $f$ una función analítica y distinta de cero en un dominio $D$. Prueba que $1/f$ es analítica en $D$. Hint: Procede de la siguiente forma.
Toma a $z_0\in D$ fijo y define: \begin{equation*} f(z) = \sum_{n=0}^\infty c_n(z-z_0)^n, \end{equation*}para todo $z\in B(z_0,\rho) \subset D$, con $\rho>0$.
Define la sucesión de coeficientes $\{b_n\}_{n\geq 0} \subset D$ recursivamente como $b_0 = 1/c_0$ y para $n\geq 1$: \begin{equation*} c_0 b_n + c_1 b_{n-1} + \cdots + c_n b_0 = 0. \end{equation*}
Define a la función: \begin{equation*} g(z) = \sum_{n=0}^\infty b_n(z-z_0)^n. \end{equation*}Elige a $r$, con $0<r<\rho$, tal que: \begin{equation*} \sum_{n=1}^\infty |a_n| r^n \leq |a_0|. \end{equation*}a) Prueba por inducción que $|b_n|r^n \leq |b_0|$. b) Muestra que $g$ converge en $B(z_0, r)$. c) Prueba que $f(z)g(z)=1$ en $B(z_0, r)$, de donde: \begin{equation*} \left(\frac{1}{f}\right)(z) = \sum_{n=0}^\infty b_n(z-z_0)^n. \end{equation*}
Supón que la serie de potencias $f(z) = \displaystyle \sum_{n=0}^\infty c_n z^n$ tiene radio de convergencia $R>0$ y $f'(0)=c_1 \neq 0$. Demuestra que para algún $0 < r \leq R$ la función $f$ es inyectiva en $B(0,r)$.
Hint: Procede como en la prueba de la proposición 30.2, observa que si $0<r<R$ y $z,w\in B(0,r)$, entonces: \begin{equation*} f(z) – f(w) = c_1(z-w) + (z-w) \sum_{n=2}^\infty c_n \sum_{m=1}^n w^{m-1} z^{n-m}, \end{equation*}de donde: \begin{equation*} |\,f(z) – f(w)\,| > \frac{|c_1|}{2} |\,z-w\,|. \end{equation*}
Determina la función suma y el dominio de convergencia de las siguientes series de potencias. a)$\displaystyle \sum_{n=0}^\infty (3+4i)^n \, z^n$. b) $\displaystyle \sum_{n=1}^\infty n(n+1) \, z^n$. c) $\displaystyle \sum_{n=0}^\infty (n^3 -1) \, z^n$. Hint: Considera el ejemplo 30.4, el inciso anterior y observa que para todo $n\in\mathbb{N}$ se cumple que:\begin{equation*} n^3 = (n+3)(n+2)(n+1) – 6n(n+1)-5(n+1)-1. \end{equation*}d) $\displaystyle \sum_{n=1}^\infty (-1)^n(n+1) \, z^n$.
Considera las siguientes series y en cada caso prueba lo que se te pide. a) \begin{equation*} f(z) = \sum_{n=0}^\infty \frac{z^{2n}}{(2n)!}. \end{equation*}Muestra que su radio de convergencia es $R=\infty$ y prueba que $f(z) = f»(z)$. b) \begin{equation*} f(z) = \sum_{n=0}^\infty \frac{z^{2n}}{(n!)^2}. \end{equation*}Muestra que su radio de convergencia es $R=\infty$ y prueba que $z^2 f»(z) + z f'(z) = 4z^2 f(z)$. c) \begin{equation*} f(z) = z – \frac{z^3}{3} + \frac{z^5}{5} – \frac{z^7}{7} + \cdots . \end{equation*}Muestra que su radio de convergencia es $R=1$ y prueba que $f'(z) = 1/(z^2+1)$.
Considera la definición 30.1 y prueba que una función $f(z) = \displaystyle \sum_{n=0}^\infty c_n z^n$ es impar si y solo si $f(-z) = -f(z)$.
Determina la serie de potencias y su dominio de convergencia de la función: \begin{equation*} f(z) = \frac{1}{(1+z)(2+z)}. \end{equation*}
Más adelante…
En esta entrada hemos probado uno de los resultados más importantes referentes a las funciones analíticas y es que dichas funciones tienen un desarrollo como serie de potencias. Este hecho es crucial pues nos garantiza que una función analítica es de clase $C^\infty$, lo cual nos será de gran utilidad en la última unidad de este curso al hablar de series de Taylor y series de Laurent que serán claves en la teoría de las funciones complejas pues nos permitirán dar de manera explícita un desarrollo en series de potencias para toda función compleja analítica.
La siguiente entrada corresponde con la última de esta tercera unidad y en ella abordaremos algunas de las funciones complejas elementales vistas como series de potencias, en particular de la función exponencial compleja que como hemos visto en la unidad anterior resulta fundamental para la definición de las demás funciones complejas elementales, por lo que a través de su desarrollo en series de potencias justificaremos su definición así como el uso de la notación $e^z$ y $\operatorname{exp}(z)$ de manera indistinta al hacer una extensión de la función real para el caso complejo.