Un problema clásico de la geometría es el Problema de Apolonio el cual enuncia:
Encontrar una circunferencia dado tres condiciones, las cuales pueden surgir de lo siguiente:
La circunferencia pasa por uno o más puntos «P»
La circunferencia es tangente a una o más líneas «L»
La circunferencia debe de ser tangente a uno o más círculos «C»
De lo anterior nacen los 10 Problemas de Apolonio (Las soluciones se darán a partir de construcciones).
Los Diez Problemas de Apolonio
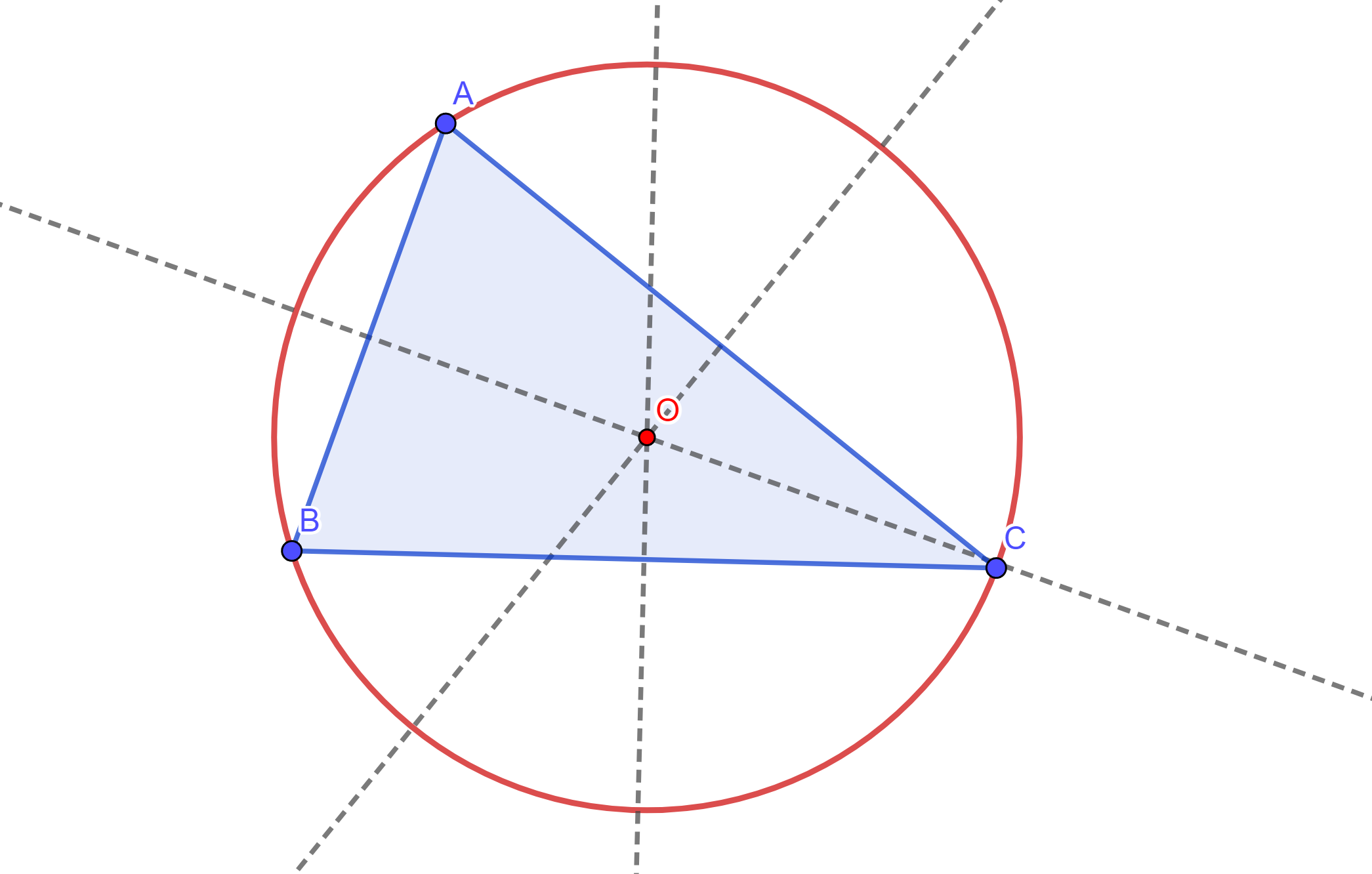
Problema 1. Construir una circunferencia que pase por tres puntos dados (PPP).
Construcción. Dados tres puntos $A$, $B$ y $C$, de los cuales podemos formar un triángulo $\triangle ABC$. Trazando las mediatrices de cada lado encontraremos el circuncentro «$O$», que resulta ser el centro de la circunferencia circunscrita al triángulo $\triangle ABC$. De esta forma podemos dibujar la circunferencia $C(O,r)$.
$\square$
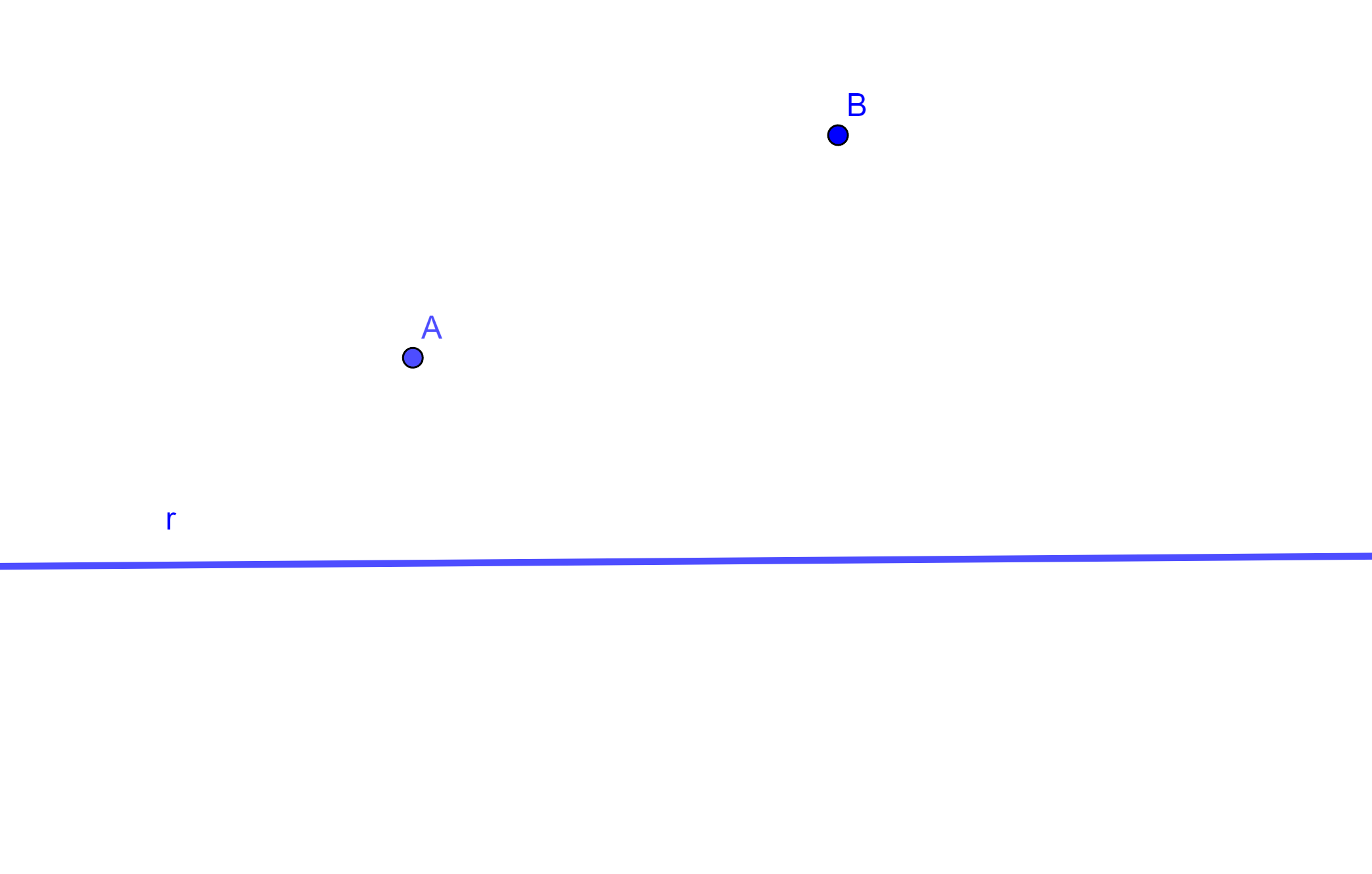
Problema 2. Construir una circunferencia que pase por dos puntos dados y tangente a una recta dada (PPL).
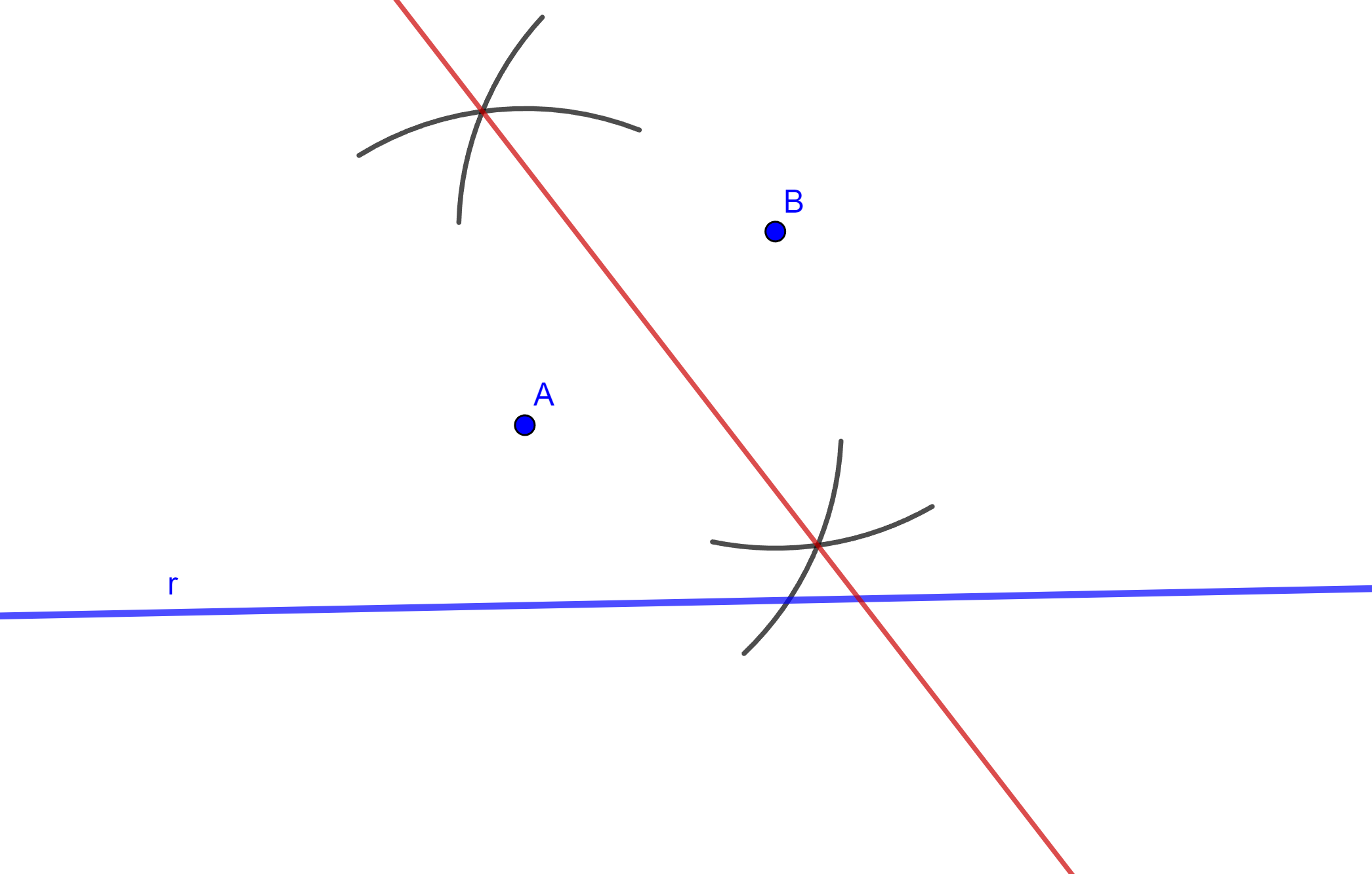
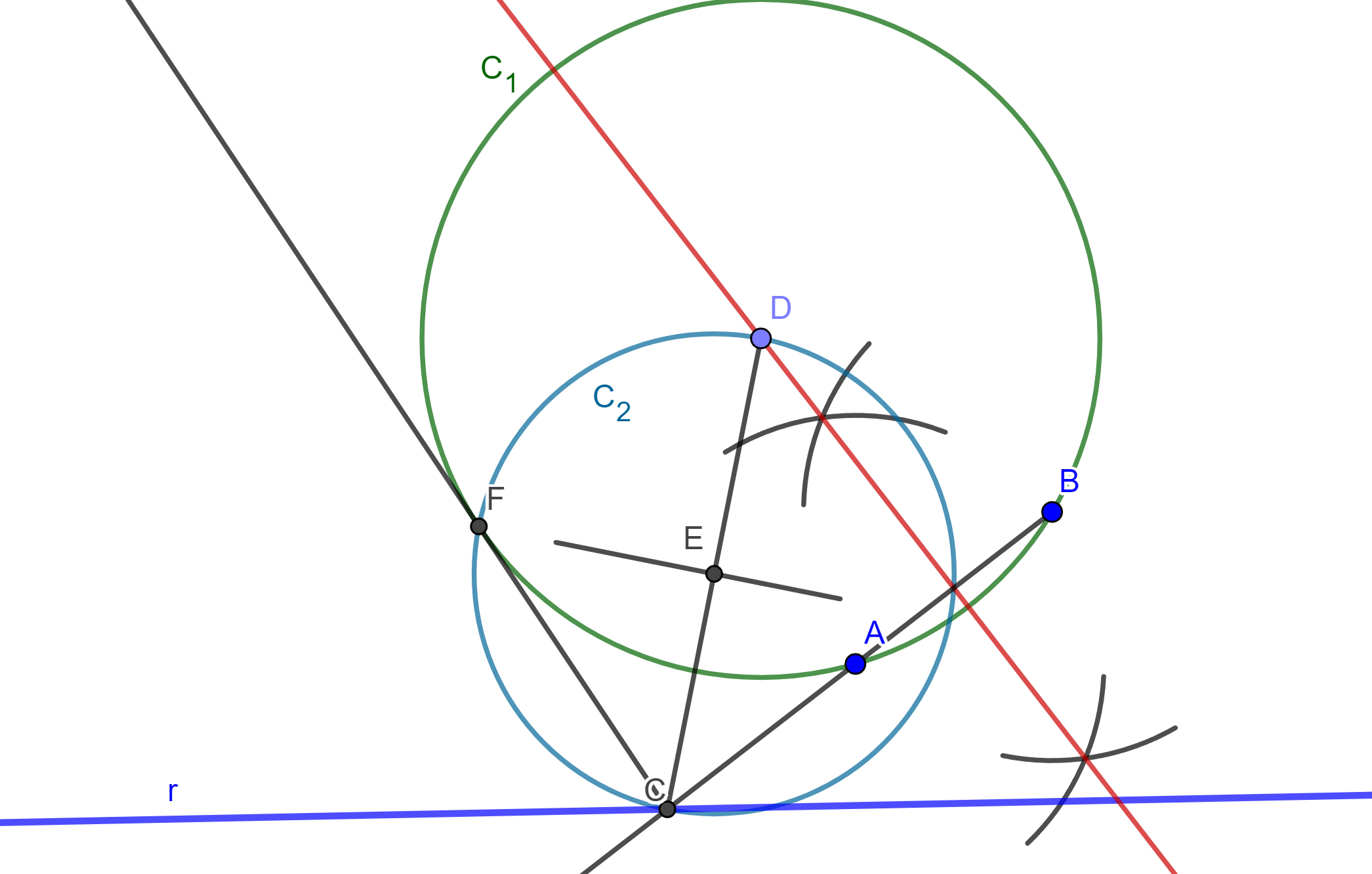
Construcción. Sean $A$ y $B$ dos puntos dados y $r$ una recta tangente a la circunferencia buscada.
El centro de la circunferencia buscada $C$ debe estar ubicada en la mediatriz del segmento $AB$, por ello dibujemos la mediatriz a través del arco de dos circunferencias con centro $A$ y centro $B$ las cuales se intersecan y se puede trazar la mediatriz.
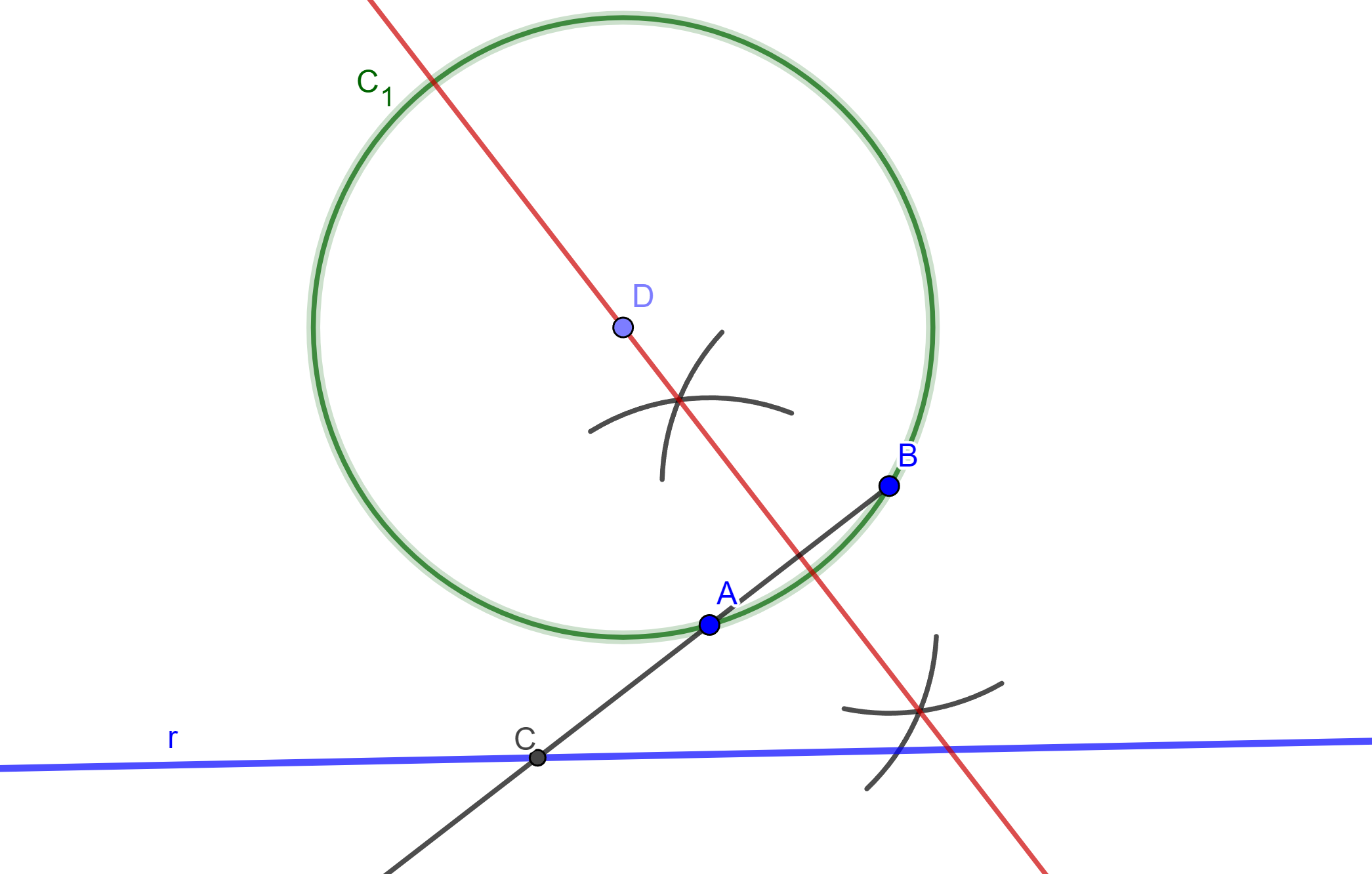
Ahora tomamos un punto «$D$» de la mediatriz, del cual lo tomamos como centro de una circunferencia $C_1$ que pase por $A$ y $B$. También trazamos el segmento $AB$ que corte $r$ en $C$.
Debemos de encontrar una recta tangente a $C_1$ y que pase por el punto $C$. Por ello unimos $DC$ y sacamos la mediatriz con centro $E$, trazamos la circunferencia $C_2$ que interseca a $C_1$ en dos puntos del cual solo nos interesa uno que es $F$ y al unirlo con $C$ este forma una recta tangente a $C_1$. Por ahora tenemos por potencia $CA * CB = CF^2$.
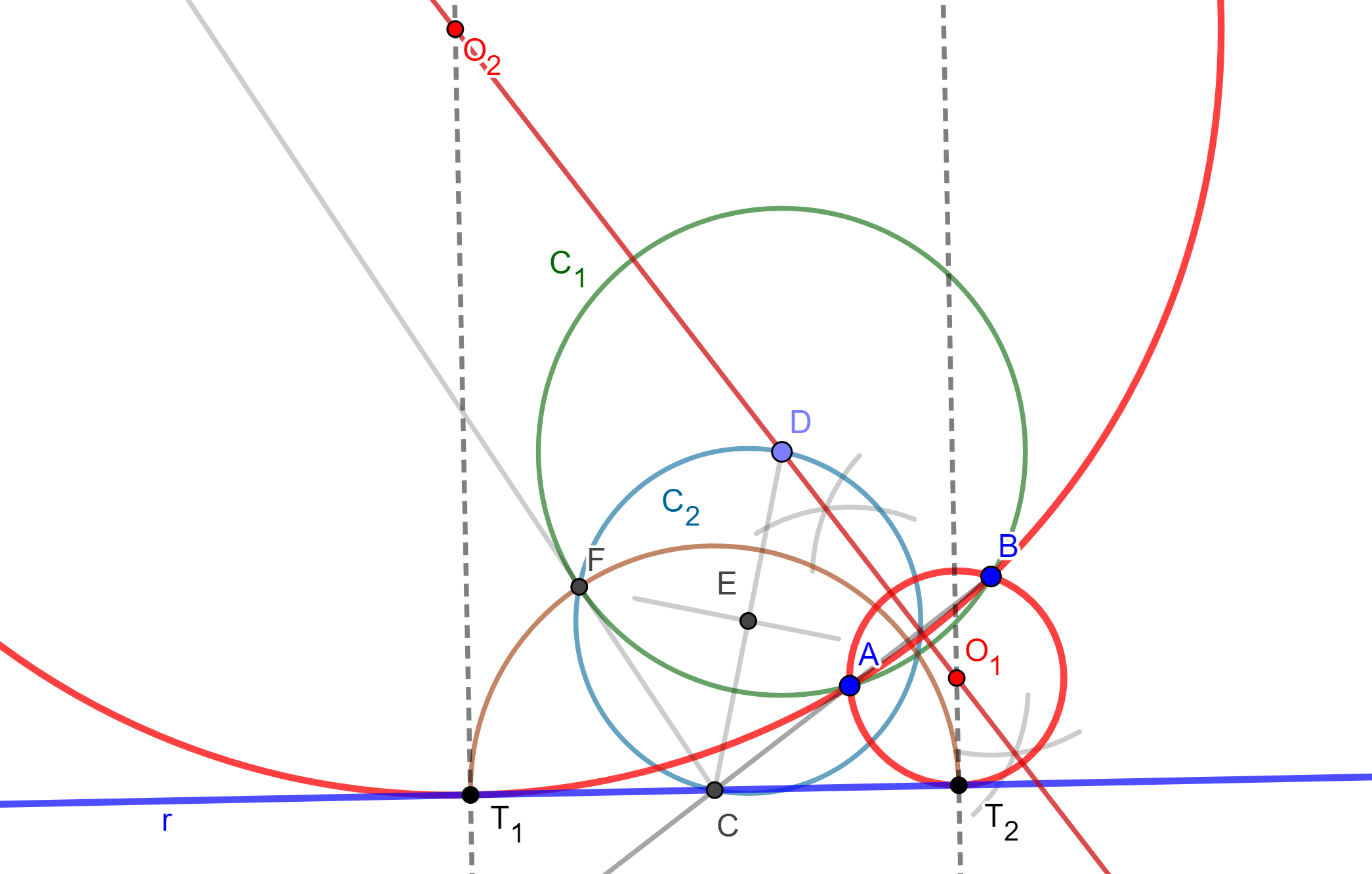
Ahora trazamos el arco de circunferencia con centro $C$ y radio $CF$ que corta a la recta $r$ en dos puntos $T_1$ y $T_2$ cumplen $CA * CB =CF^2 =CT_1^2 = CT_2^2$ perpendiculares por $T_1$ y otra por $T_2$, y cortan a la mediatriz $AB$. Y en esas intersecciones van a estar los centros de las circunferencias que pasan por $A$, $B$ y tangentes a $r$.
$\square$
Problema 3. Construir una circunferencia tangente a dos líneas dadas y que pasa por un punto (PLL).
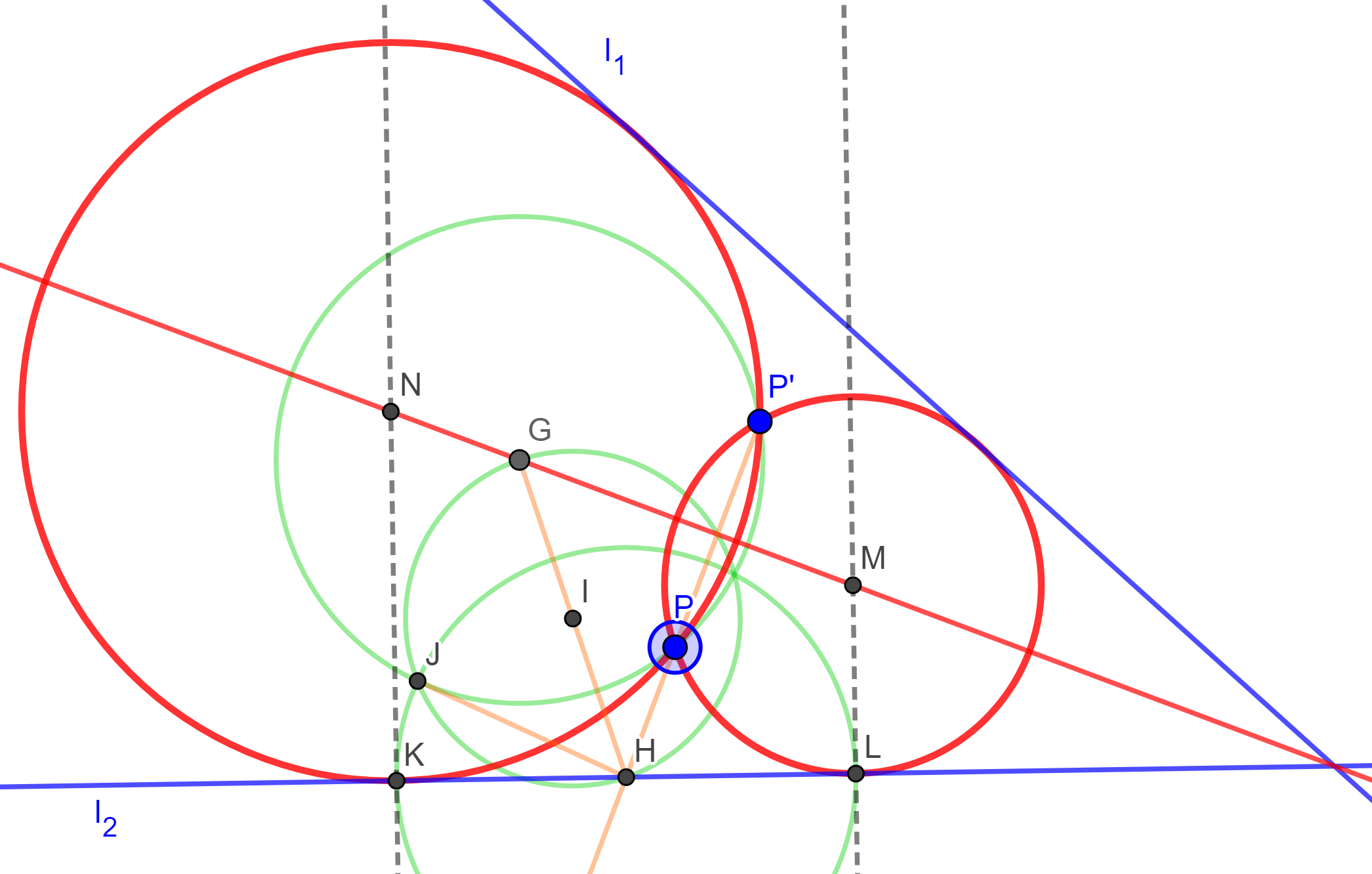
Construcción. Sean $l_1$ y $l_2$ dos rectas dadas y $P$ un punto dado, notemos que el centro de la circunferencia buscada es un punto de la bisectriz; Por otro lado, la circunferencia buscada debe contener a $P$ y $P’$ punto simétrico respecto a la bisectriz. Si observamos tenemos el caso del problema 2 PPL, ya que tenemos dos puntos $P$ y $P’$ por los cuales pasara la circunferencia buscada, además de que es tangente a una recta $l_1$. Por tal motivo se puede seguir la misma construcción anterior para llegar a la solución.
$\square$
Problema 4. Construir un círculo tangente a tres líneas dadas (LLL).
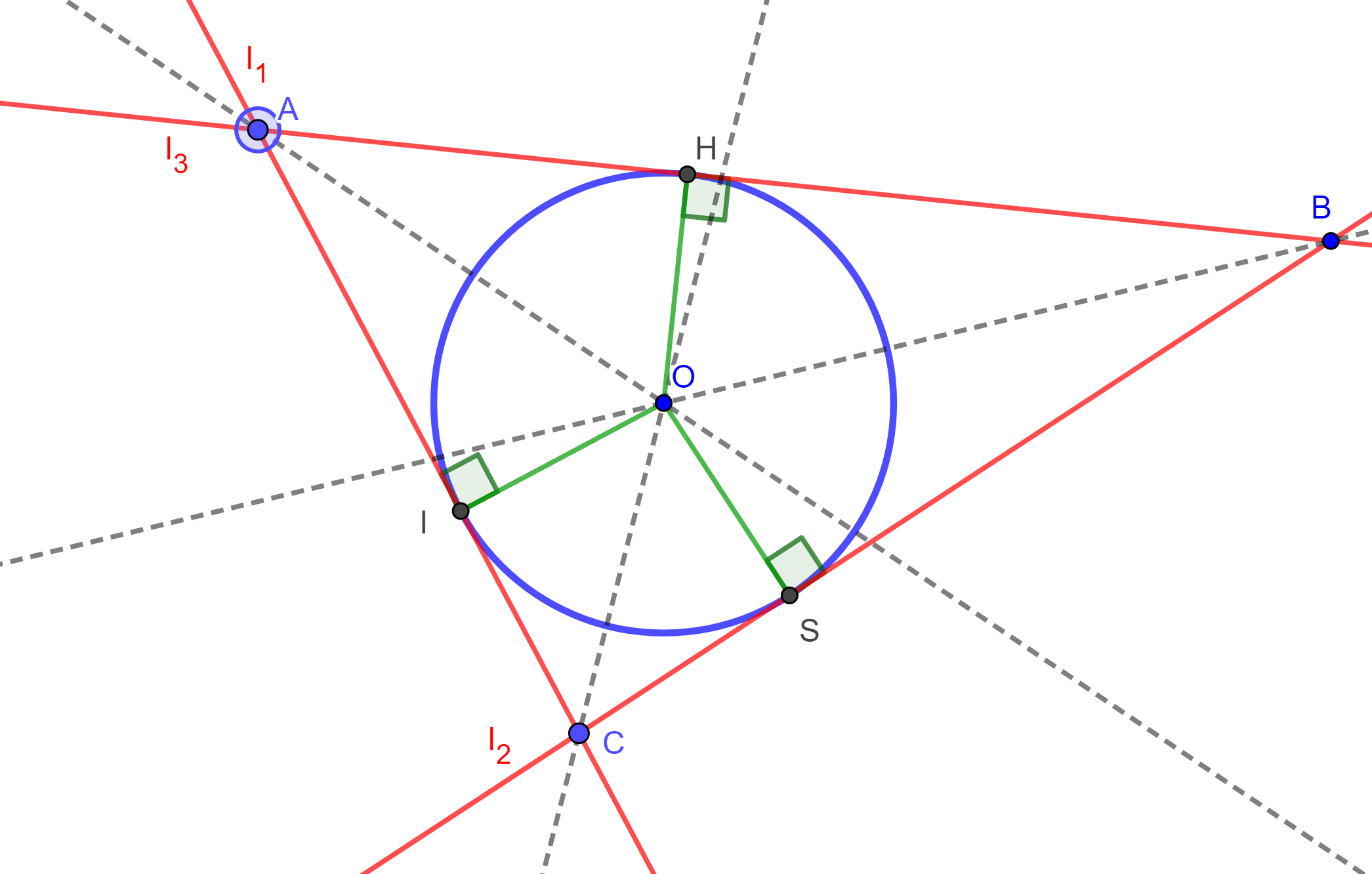
Construcción. Sean tres rectas dadas $l_1$, $l_2$ y $l_3$, las cuales forman un triángulo $\triangle ABC$. Trazando las bisectrices de los ángulos internos del triángulo $\triangle ABC$ se intersecan en un único punto $O$. El punto $O$ es el centro de la circunferencia inscrita del triángulo $\triangle ABC$ , ahora trazamos las perpendiculares por $O$ a cada lado y encontraremos el radio $OS$ el cual nos da la circunferencia tangente a $l_1$, $l_2$ y $l_3$.
$\square$
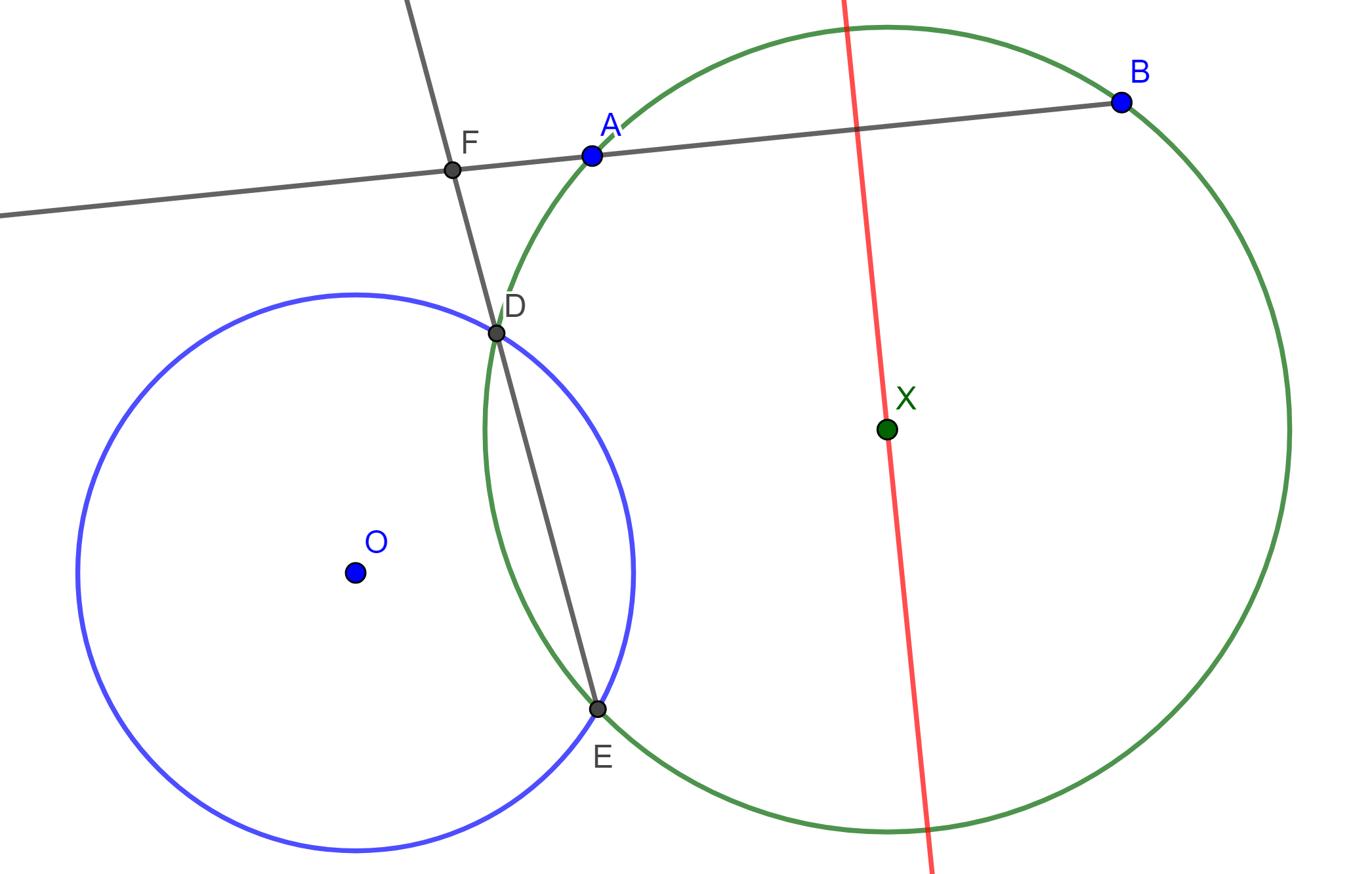
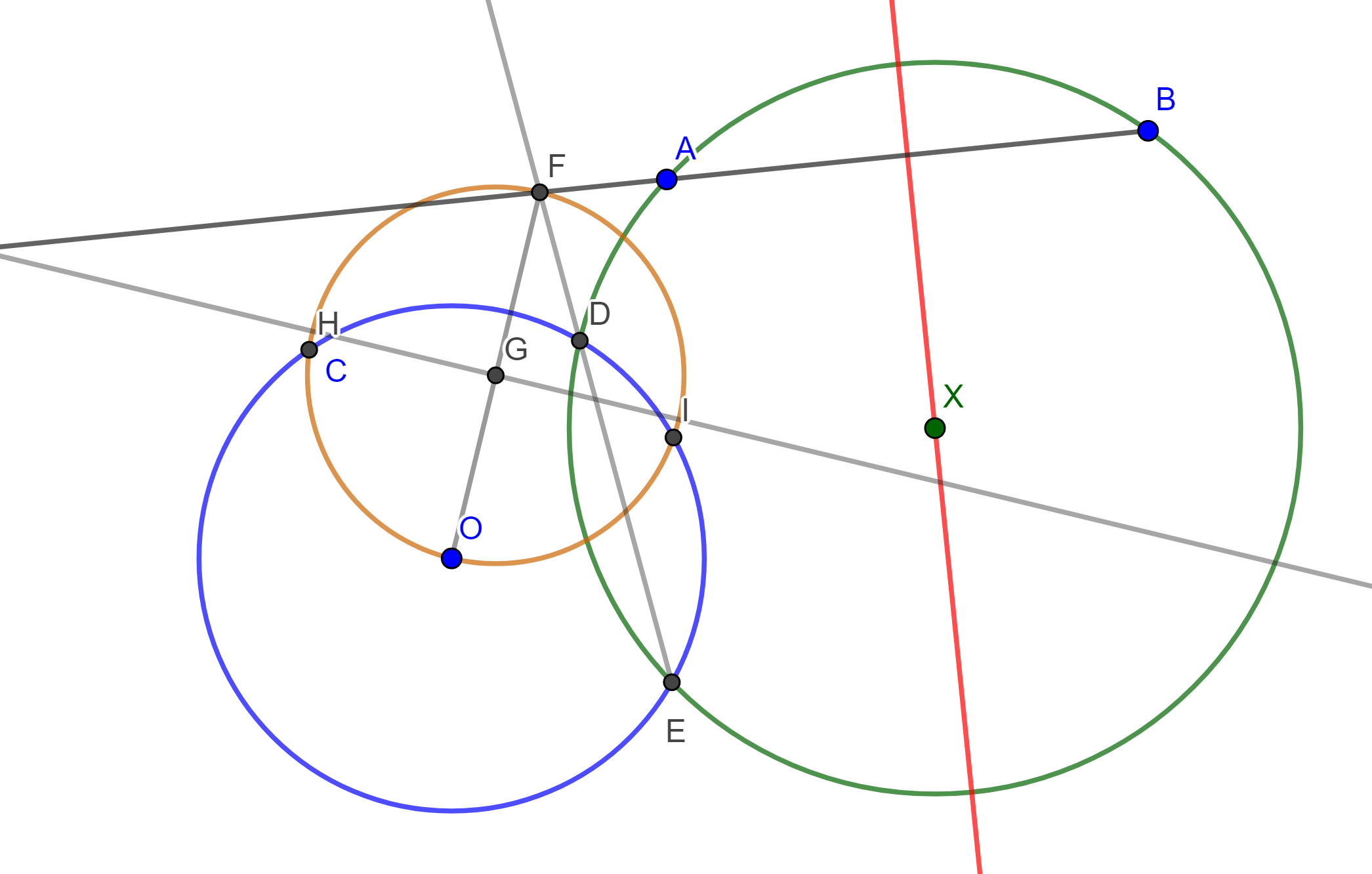
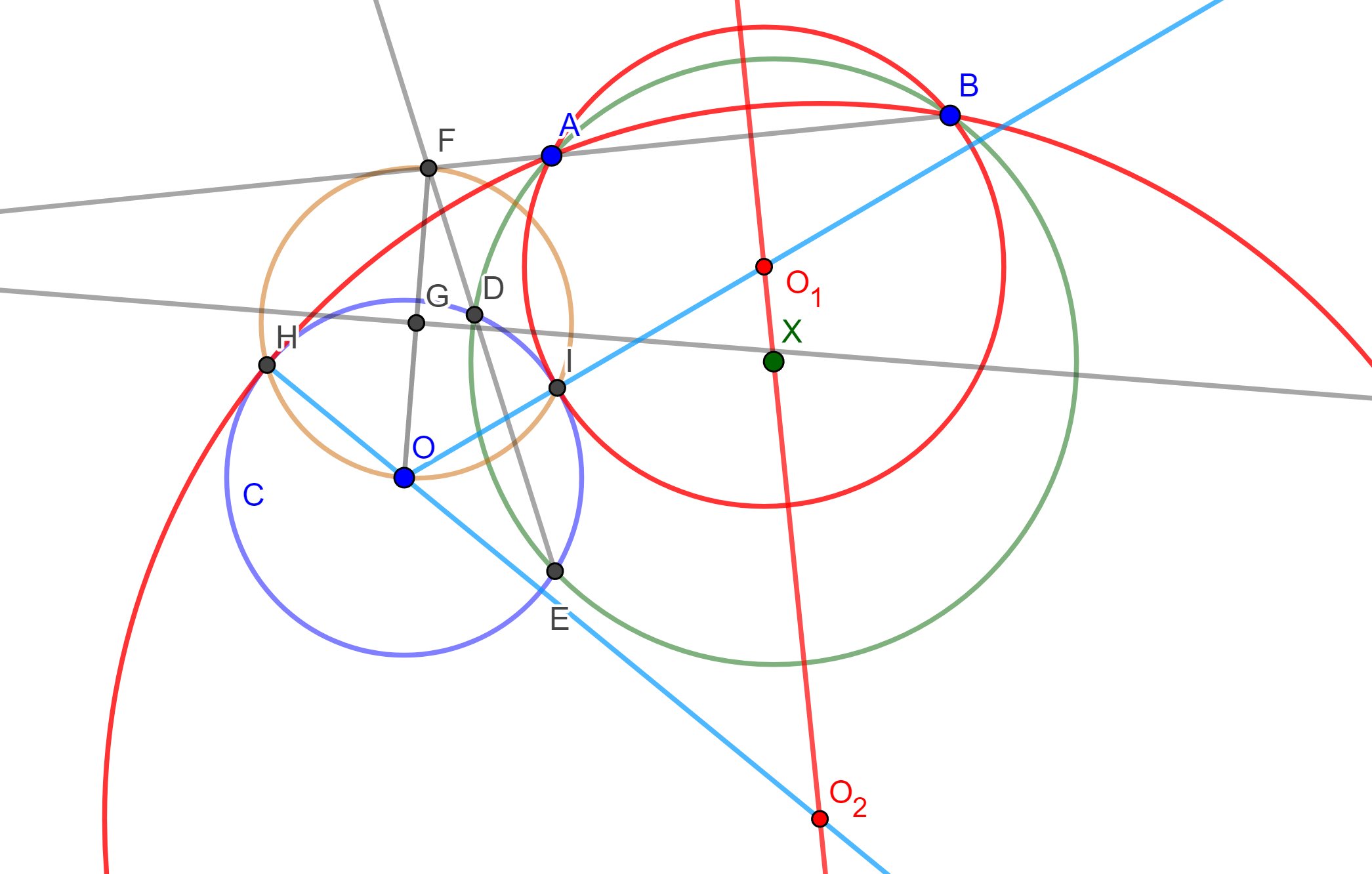
Problema 5. Construye una circunferencia pasando por dos puntos dados y tangente a un círculo dado (PPC).
Construcción. Existen varios casos para este problema, en este caso tomaremos a los puntos $A$ y $B$ fuera de la circunferencia dada $C(O,r)$. Trazamos la mediatriz de $A$ y $B$, después tomamos un punto cuál sea $x$ en la mediatriz y generamos una circunferencia con centro en $x$ y radio $A$ o $B$ y que corta a la circunferencia $C(O,r)$. Los dos puntos de intersección los llamaremos $D$ y $E$ los uniremos y prolongaremos hasta que corte a la recta $AB$, el punto de intersección será $F$.
Unimos $F$ con $O$ y sacamos su mediatriz, denotamos a $G$ al punto de intersección de $FO$ con la mediatriz. Ahora trazamos la circunferencia con centro $G$ y radio $O$ la cual corta a $C(O,r)$ en $H$ y $I$.
Si unimos $I$ con $O$ corta a la mediatriz $AB$ en $O_1$, el cual será el centro de la circunferencia buscada con radio $O_1I$ y por lo cual pasa por $A$, $B$ y tangente $C(O,r)$. Ocurre lo mismo si unimos $H$ con $O$, corta a la mediatriz de $AB$ en $O_2$, este sería el centro $O_2$ y radio $O_2A$, el cual genera la otra circunferencia tangente a $C(O,r)$ y pasa por $A$ y $B$.
$\square$
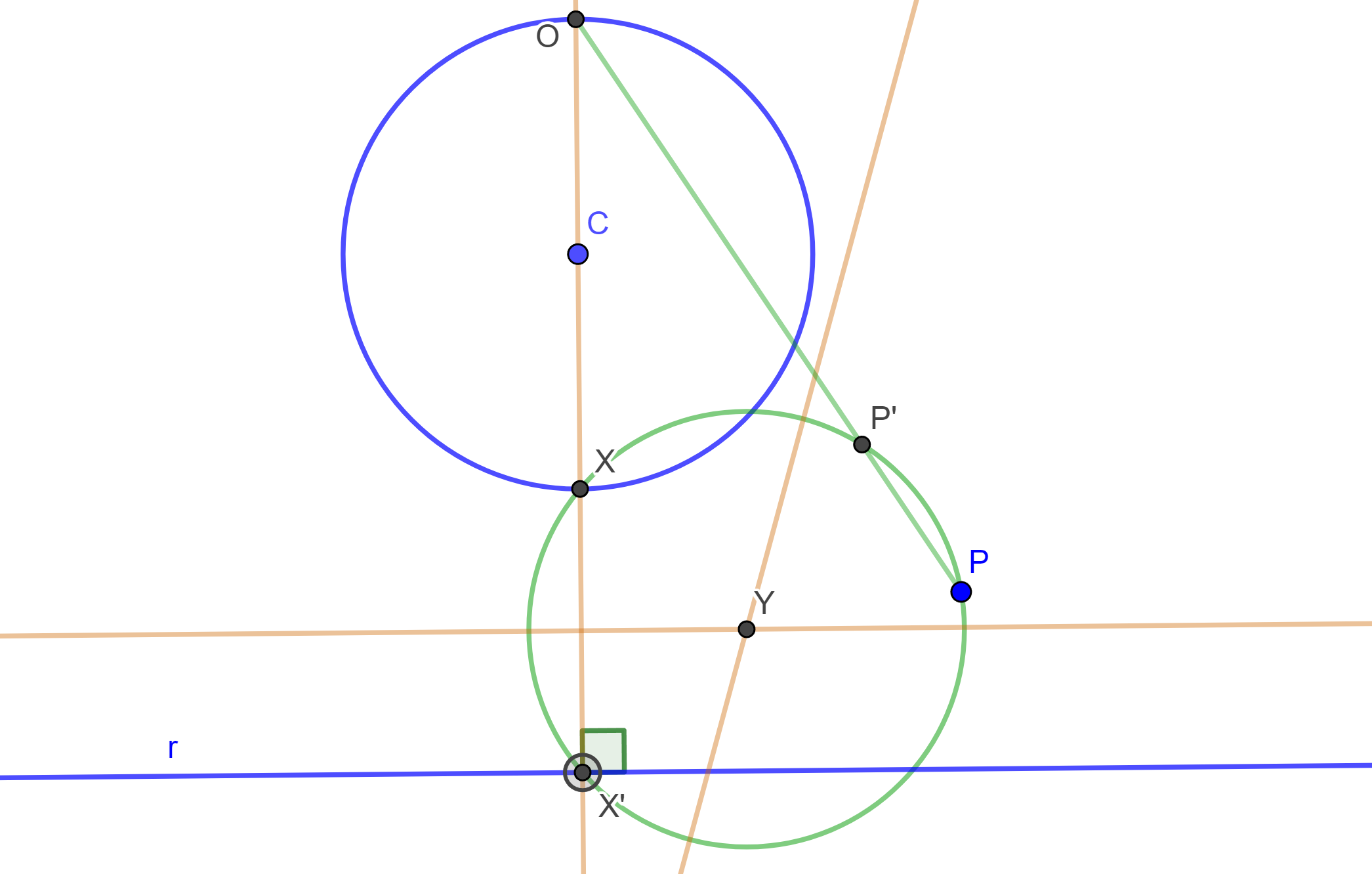
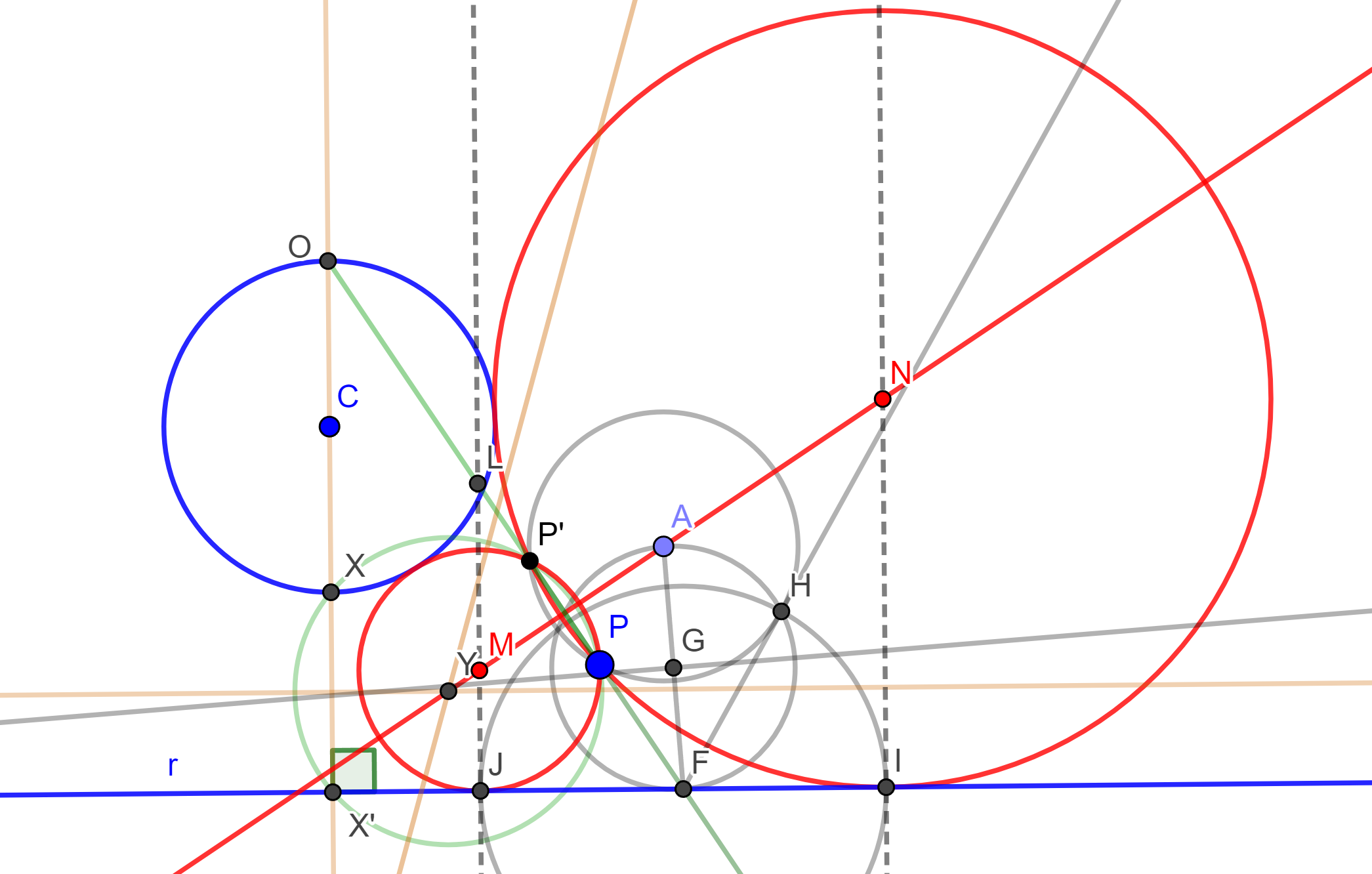
Problema 6. Construir una circunferencia que pase por un punto dado, tangente a una recta dada y tangente a un círculo dado (PLC).
Construcción. Para este problema 6 podemos encontrar cuatro soluciones, pero por ahora solo se dará una parte de la construcción, ya que lo demás ya se ha venido trabajando en las construcciones anteriores. Tenemos la circunferencia $C$, el punto $P$ y la recta $r$. Trazamos una perpendicular a $r$ que pase por $C$, ahora sea $O$ el punto de corte que será el centro de inversión que convierte la circunferencia $C$ en la recta $r$, entonces los puntos $x$ y $x’$ son inversos. Ahora debemos encontrar el punto inverso de $P$, por ello trazamos la mediatriz de $xx’$ y trazamos la mediatriz de $xP$, estas dos rectas cortan en $Y$ el cual es el centro de circunferencia que corto a $x$, $x’$ y $P$, y el punto de intersección de esta circunferencia con la recta $OP$ tendremos $P’$.
Nos daremos cuenta de que tenemos el mismo problema 2 PPL, por lo cual solo se debe seguir la misma construcción para hallar las circunferencias buscadas.
De aquí en adelante se enunciarán únicamente los problemas faltantes.
Problema 7. Construir una circunferencia que pase por un punto $P$ dado y dos círculos tangentes a esta circunferencia buscada (PCC) (4 soluciones).
Problema 8. Construir una circunferencia tangente a dos rectas dadas y a un círculo dado (LLC) (8 soluciones).
Problema 9. Construir una circunferencia tangente a una línea dada y a dos círculos dados (LCC) (8 soluciones).
Problema 10.(Problema de Apollonius) Construir una circunferencia tangente a tres círculos dados (CCC).
Más adelante…
Una vez visto el tema de Polos y Polares, es hora de realizar unos ejercicios que se dejaran, todo con el objetivo de fortalecer los temas vistos.
El Espacio Eculideo $\mathbb{R}n$ es un concepto fundamental en Cálculo multivariable y en álgebra lineal. Se utiliza para describir y estudiar espacios de múltiples dimensiones donde se pueden analizar vectores, distancias, funciones y geometría.
Definición. Como conjunto, $\mathbb{R}^{n}$ es la colección de todas las n-adas ordenadas de números reales. Es decir $$\mathbb{R}^{n}={(x_{1},x_{2},…,x_{n})|x_{i}\in \mathbb{R},~i=1,2,…,n}$4
Notación Denotamos a un elemento de $\mathbb{R}^{n}$ por $\overline{x}=(x_{1},x_{2},…,x_{n})$. Dados dos elementos $\overline{x},\overline{y}\in \mathbb{R}^{n}$ decimos que $\overline{x}=\overline{y}\Leftrightarrow x_{i}=y_{i}$ $\forall i=1,2,…,n$. Frecuentemente a los elementos de $\mathbb{R}^{n}$ se les denomina vectores, y con las operaciones usuales (suma y producto por un escalar), definidas como Definición.La suma $+:\mathbb{R}^{n}\times \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}$ para dos elementos $\overline{x},\overline{y}\in\mathbb{R}^{n}$ se define asi: $$\overline{x}+\overline{y}=(x_{1},x_{2},…,x_{n})+(y_{1},y_{2},…,y_{n})=(x_{1}+y_{1},x_{2}+y_{2},…,x_{n}+y_{n})$$ El producto $\overline{x}\in\mathbb{R}^{n}$ por un escalar $a\in\mathbb{R}$ como $$\alpha(x_{1},x_{2},…,x_{n})=(\alpha x_{1},\alpha x_{2},…,\alpha x_{n})$$ $\mathbb{R}^{n}$ es un espacio vectorial. La base canónica de dicho espacio vectorial son los vectores:$$e_{1}=(1,0,0,…,0)$$$$e_{2}=(0,1,0,…,0)$$$$.$$$$.$$$$.$$$$e_{n}=(0,0,0,…,1)$$ ya que si $\overline{x}=(x_{1},x_{2},…,x_{n})$, se tiene que $\overline{x}=x_{1}e_{1}+x_{2}e_{2}+…+x_{n}e_{n}$
Estructura Geométrica
Para dotar de una estructura geométrica al espacio $\mathbb{R}^{n}$ (que incluya los conceptos de distancia, ángulo y ortogonalidad) debemos dotar a $\mathbb{R}^{n}$ de un producto escalar. Definición. Sea E un espacio vectorial, un producto escalar en E es una función de $E\times E$ en $\mathbb{R}$ que a cada par de vectores $\overline{x},\overline{y}$ le asocia un número $$\langle \overline{x},\overline{y}\rangle$$ que satisface las siguientes propiedades:
(a) $\langle \overline{x},\overline{x}\rangle>0$ si $\overline{x}\neq 0$ (b) $\langle \overline{x},\overline{y}\rangle=\langle \overline{y},\overline{x}\rangle$ (c) $ \langle \lambda \overline{x},\overline{y}\rangle=\lambda\langle \overline{x},\overline{y}\rangle$ (d) $\langle \overline{x}+\overline{y},\overline{z}\rangle=\langle \overline{x}+\overline{z}\rangle+\langle \overline{y},\overline{z}\rangle$ Ejemplo. Sea $C[a,b]$ el espacio lineal de todas las funciones reales continuas continuas en el intervalo $[a,b]$. Definimos $\langle f,g\rangle$ mediante la fórmula $$\langle f,g\rangle=\int_{a}^{b}f(t)g(t)dt.$$ Vamos a probar que $\langle f,g\rangle$ define un producto escalar en $c([a,b])$ (a) Tenemos que $$\langle f,g\rangle=\int_{a}^{b}f(t)\cdot f(t)~dt=\int_{a}^{b}f^{2}(t)~dt~\geq 0~$$ la última desigualdad la justificamos usando las propiedades de la integral $\displaystyle{f\geq 0~\Rightarrow~\int_{a}^{b}f~\geq 0~}$ (b) Tenemos que $$\langle f,g\rangle=\int_{a}^{b}f(t)g(t)~dt=\int_{a}^{b}g(t)f(t)~dt=\langle g,f\rangle$$ (c) Tenemos que $$\langle \lambda f,g\rangle=\int_{a}^{b}\lambda~f(t)~g(t)~dt=\lambda~\int_{a}^{b}f(t)~g(t)~dt=\lambda~\langle f,g\rangle$$ (d) Tenemos que \begin{align*} \langle f+g,h\rangle & =\int_{a}^{b}[f(t)+g(t)]h(t)~dt \\ &=\int_{a}^{b}[f(t)h(t)+g(t)h(t)]~dt \\ &=\int_{a}^{b}f(t)h(t)~dt+\int_{a}^{b}g(t)h(t)~dt \\ &=\langle f,h\rangle+\langle g,h\rangle \end{align*} en este caso $\langle f,g\rangle$ es un producto escalar para $C[a,b]$.$\blacksquare$
El espacio normado $\mathbb{R}^{n}$
Definición. Un producto escalar $\langle,\rangle$ en un espacio vectorial E da lugar a una noción de longitud de un vector $\overrightarrow{x}\in E$, llamada su norma, y definida como $$|\overline{x}|=\sqrt{\langle \overline{x},\overline{x}\rangle}$$ En general, una norma en un espacio vectorial E es una aplicación $x\rightarrow |x|$ de E en $(0,+\infty)$ que satisface las siguientes propiedades: (1) $|\overline{x}|\geq 0$ para toda $\overline{x}\in\mathbb{R}^{n}$ y $|\overline{x}|=0$ si y sólo si $\overline{x}=\overline{0}$ (2) $|\lambda \overline{x}|=\lambda |\overline{x}|$ para toda $\overline{x}\in\mathbb{R}^{n}$ y $\lambda\in \mathbb{R}$ (3) $|x+y|\leq |x|+|y|$ para cualesquiera $\overline{x},\overline{y}\in\mathbb{R}^{n}$ (Desigualdad Triangular) Al par $(E,|.|)$ se le denomina espacio normado. Ejemplo. Veamos que $$|\overline{x}|=\sqrt{\langle \overline{x},\overline{x}\rangle}$$ define una norma. Solucion. (1) Tenemos que $$|\overline{x}|=\sqrt{\langle \overline{x},\overline{x}\rangle}\geq 0$$ la última igualdad la justificamo así: $\langle \overline{x},\overline{x}\rangle>0~\Rightarrow~\sqrt{\langle \overline{x},\overline{x}\rangle}>0$ (2) Tenemos que \begin{align*} |\lambda \overline{x}| &=\sqrt{\langle \lambda\overline{x},\lambda\overline{x}\rangle} \\ &=\sqrt{\lambda^{2}\langle \overline{x},\overline{x}\rangle} \\ &=|\lambda|\langle \overline{x},\overrightarrow{x}\rangle\\ &=|\lambda|~|\overline{x}| \end{align*} (3) Para la desigualdad del triángulo necesitamos antes probar un resultado $\fbox{Lema: Desigualdad de Caychy}$ Si E es un espacio vectorial entonces $\forall~\overline{x},\overline{y}\in E$ se cumple $$|\langle\overline{x},\overline{y}\rangle|\leq |\overline{x}|~|\overline{y}|$$ Demostración. Supongamos que $\overline{x},\overline{y}\neq 0$ y definimos $$\overline{u}=\frac{\overline{x}}{\|\overline{x}\|}~~\overline{v}=\frac{\overline{y}}{\|\overline{y}\|}$$ Tenemos entonces que \begin{align*} \|\overline{u}\| & =\left\|\frac{\overline{x}}{|\overline{x}|}\right\|=\frac{\|\overline{x}\|}{\|\overline{x}\|}=1 \\ \|\overline{v}\| & =\left\|\frac{\overline{y}}{\|\overline{y}\|}\right\|=\frac{\|\overline{y}\|}{\|\overline{y}\|}=1 \end{align*} Por tanto \begin{align*} 0\leq \|\overline{u}-\overline{v}\|^{2} & =\langle\overline{u}-\overline{v},\overline{u}-\overline{v}\rangle \\ & =\langle\overline{u}-\overline{u}\rangle-2\langle\overline{u}-\overline{v}\rangle+\overline{v}-\overline{v} \\ & =\|\overline{u}\|^{2}-2\langle\overline{u}-\overline{v}\rangle+\|\overline{u}\|^{2} \\ & =1-2\langle\overline{u},\overline{v}\rangle+1 \\ & =2-2\langle\overline{u},\overline{v}\rangle \end{align*} Por lo tanto \begin{align*} 0\leq 2-2\langle\overline{u},\overline{v}\rangle&~\Rightarrow~2\langle\overline{u},\overline{v}\rangle\leq 2 \\ &~\Rightarrow~\langle\overline{u},\overline{v}\rangle\leq 1 \\ &~\Rightarrow~\left\langle\frac{\overline{x}}{|\overline{x}|},\frac{\overline{y}}{\|\overline{y}\|}\right\rangle\leq 1 \\ &~\Rightarrow~\frac{1}{\|\overline{x}\|~\|\overline{y}\|}\langle\overline{x},\overline{y}\rangle\leq 1 \\ &~\Rightarrow~\langle\overline{x},\overline{y}\rangle\leq\|\overline{x}\|~\|\overline{y}\| \end{align*} Reemplazando $\overline{x}$ por $-\overline{x}$ se obtiene que \begin{align*} \langle\overline{-x},\overline{y}\rangle\leq\|-\overline{x}\|~\|\overline{y}\| & ~\Rightarrow~-\langle\overline{x},\overline{y}\rangle\leq~|-1|~|\overline{x}|~|\overline{y}| \\ &~\Rightarrow~\langle\overline{x},\overline{y}\rangle\geq~-\|\overline{x}\|~\|\overline{y}\| \end{align*} con lo que queda demostrada la desigualdad.$~\blacksquare$ Regresando ahora a la desigualdad triangular tenemos que \begin{align*} \|\overline{x}+\overline{y}\|=\sqrt{\langle\overline{x}+\overline{y},\overline{x}+\overline{y}\rangle} & ~\Rightarrow~\|\overline{x}+\overline{y}\|^{2}=\langle\overline{x}+\overline{y},\overline{x}+\overline{y}\rangle \\ & ~\Rightarrow~\|\overline{x}+\overline{y}\|^{2}=\langle\overline{x},\overline{x}\rangle+2\langle\overline{x},\overline{y}\rangle+\langle\overline{y},\overline{y}\rangle \\ &~\Rightarrow~\|\overline{x}+\overline{y}\|^{2}=\|\overline{x}\|^{2}+2\langle\overline{x},\overline{y}\rangle+|\overline{y}|^{2} \\ & ~\Rightarrow~\|\overline{x}+\overline{y}\|^{2}\leq \|\overline{x}\|^{2}+2\|\overline{x}\|~\|\overline{y}\|+\|\overline{y}\|^{2} \\ & ~\Rightarrow~\|\overline{x}+\overline{y}\|^{2}\leq \left(\|\overline{x}\|+\|\overline{y}\|\right)^{2} \end{align*} Y tomando raíces en ambos miembros de la desigualdad, obtenemos el resultado.$~\blacksquare$
Otras normas en $\mathbb{R}^n$
Ejemplo.
$\fbox{La Norma 1 $\|\overline{x}\|_{1}$}$ Definimos $\|\\,\|_1:\mathbb{R}^n \rightarrow \mathbb{R}$ por $\|\,\|_1 = |x_1|+\ldots+|x_n|$ $\forall \, \bar{x} \in \mathbb{R}^n$. Vamos a probar que $\|\,\|_1 $ es una norma en $\mathbb{R}^n$ (a) Dado que $\forall \, x \in \mathbb{R}$ $|x|\geq 0$, se tiene $\|\,\|_1 = |x_1|+\ldots+|x_n|\geq 0$ $\forall \, \bar{x} \in\mathbb{R}^n$. (b) Si $\alpha \in \mathbb{R}$ y $\bar{x}=(x_1,\ldots,x_n) \in \mathbb{R}^n$, entonces \[\begin{array}{ll} |\alpha\bar{x}| & =|\alpha x_1|+ \ldots + |\alpha x_n|\\ \, & =|\alpha||x_1|+ \ldots + |\alpha||x_n|\\ \, & = |\alpha|(|x_1|+ \ldots + |x_n|)\\ \, & = |\alpha||\bar{x}| \quad \forall \, \bar{x}\in\mathbb{R}^n\ \end{array}\] (c) Si $\bar{x}=(x_1,\ldots,x_n)$ y $\bar{y}=(y_1,\ldots,y_n)$ son elementos de $\mathbb{R}^n$ \[\begin{array}{ll} |\bar{x}+\bar{y}| & =|x_1+y_1|+ \ldots + |x_n+y_n|\\ \, & \leq|x_1|+|y_1|+ \ldots + |x_n|+|y_n|\\ \, & = |x_1|+ \ldots +|x_n|+ \ldots + |y_1|+ \ldots +|y_n|\\ \, & = |\bar{x}|_1 + |\bar{y}|_1 \end{array}\] Si $|\bar{x}|_1=0~\Rightarrow~|x_1|+ \ldots+|x_n|=0$ y como cada $|x_i|\geq 0$ $i=1,\ldots,n$ entonces $|x_1|+ \ldots +|x_n|=0~\Rightarrow~|x_i|= 0$ $i=1,\ldots,n~~~\therefore~~~\bar{x}=0$.$~~\blacksquare$ Ejemplo. $\fbox{La Norma infinito $\|\overline{x}\|_{\infty}$}$ Consideremos ahora la función $\|\,\|_\infty:\mathbb{R}^n \rightarrow \mathbb{R}$ dada por $$\boxed{\|\overline{x}\|_\infty=\max{|x_1|+\ldots +|x_n|}~~\forall x\in\mathbb{R}^n}$$ Vamos a probar que la función $\|\,\|_\infty:\mathbb{R}^n \rightarrow \mathbb{R}$ es una norma en $\mathbb{R}^n$, que se denomina norma del máximo o norma cúbica. (a) Puesto que $|x_i|\geq 0~~i=1,\ldots,n$\ entonces $$\max{|x_1|+\ldots +|x_n|}\geq0$$ es decir $$\|\bar{x}\|_\infty \geq 0$$ (b) Sea $\alpha\in\mathbb{R}$ y $\bar{x}\in\mathbb{R}^n$. Se tiene entonces que $$\|\alpha \bar{x}\|=\max\{|\alpha x_1|,\ldots,|\alpha x_n|\}=\max\{|\alpha|| x_1|,\ldots,|\alpha||x_n|\}$$ Supongamos ahora que $$|x_{i\alpha}|=\max \{ |x_1|, \ldots, |x_n| \}$$ $\therefore~~~|x_{i\alpha}|\geq |x_i|,~~~\forall~ i=1,\ldots,n~~~\therefore~~~|\alpha||x_{i\alpha}|\geq |\alpha||x_i|,~~\forall ~~ i=1,\ldots,n$ $\therefore$ $|\alpha x_{i\alpha}|\geq |\alpha x_i|$ $\forall~~i=1,\ldots,n$ por lo que $$|\alpha||x_{i\alpha}|= |\alpha x_{i\alpha}|=\max\{|\alpha x_1|,\ldots,|\alpha x_n|\}=\max\{|\alpha|| x_1|,\ldots,|\alpha||x_n|\}$$ es decir $$|\alpha|\max \{ |x_1|, \ldots, |x_n| \} = \max\{|\alpha x_1|,\ldots,|\alpha x_n|\}=\max\{|\alpha|| x_1|,\ldots,|\alpha||x_n|\}$$ $\therefore~~~|\alpha|\|\bar{x}\|_{\infty}=\|\alpha \bar{x}\|_{\infty}$ (c) $\|\bar{x}+\bar{y}\|_{\infty}=\max\{|x_1+y_1|,\ldots,|x_n+y_n|\}$ Sea $$|x_{1\alpha}+y_{1\alpha}|=\max\{|x_1+y_1|,\ldots,|x_n+y_n|\}$$ como $$|x_{1\alpha}+y_{1\alpha}|\leq|x_{1\alpha}|+|y_{1\alpha}|$$ se tiene que $$\max\{|x_1+y_1|,\ldots,|x_n+y_n|\}\leq|x_{1\alpha}|+|y_{1\alpha}|$$ pero por definición de $$\max\{|x_1|+\ldots+|x_n|\}~~y~~ \max\{|y_1|+\ldots +|y_n|\}$$ también se tiene que $$|x_{1\alpha}|\leq \max\{|x_1|+\ldots +|x_n|\}~~~y~~~|y_{1\alpha}|\leq \max\{|y_1|+\ldots+|y_n|\}$$ luego $$\max\{|x_1+y_1|,\ldots,|x_n+y_n|\} \leq \max\{|x_1|+\ldots +|x_n|\} + \max\{|y_1|+\ldots+|y_n|\}$$ o sea $$\|\bar{x}+\bar{y}\|_{\infty} \leq\|\bar{x}\|_{\infty}+\|\bar{y}\|_{\infty}.~~\blacksquare$$ Ejemplo. Norma Euclidiana Consideremos ahora la función $\|\,\|_\infty:\mathbb{R}^n \rightarrow \mathbb{R}$ dada por $$|x|=\sqrt{\langle x,x\rangle}$$ Vamos a mostrar que es una norma en $\mathbb{R}^n$ (a) $\|\bar{x}\|=\sqrt{x_1^2+\ldots+x_n^2} \geq 0$ pues es la raíz positiva $\therefore$ $\|\bar{x}\|\geq 0$. (b)
\[\begin{array}{ll} \|\bar{x}+\bar{y}\|^2 & = (x_1+y_1)^2 + \ldots + (x_n+y_n)^2\\ \, & =x_1^2+2x_1y_1+y_1^2 + \ldots + x_n^2+2x_ny_n+y_n^2\\ \, & =x_1^2+\ldots+ x_n^2 +2(x_1y_1+\ldots +x_ny_n )+ y_1^2 + \ldots +y_n^2\\ \, & = \|\bar{x}\|^2+2(x_1y_1+\ldots +x_ny_n )+ \|\bar{y}\|^2 \end{array}\] Aplicando la desigualdad de Cauchy-Shwarz $$x_1y_1+\ldots+x_ny_n \leq \|\bar{x}\|~\|\bar{y}\|$$ se tiene que $$\|\bar{x}\|^2+2(x_1y_1+\ldots+x_ny_n)+\|\bar{y}\|^2 \leq \|\bar{x}\|^2+2~\|\bar{x}\|~\|\bar{y}\|+ \|\bar{y}\|^2 =\left [\|\bar{x}\|+\|\bar{y}\|\right]^2$$ $\therefore~~~\|\bar{x}+\bar{y}\|^2\leq \left[\|\bar{x}\|+\|\bar{y}\|\right]^2$ y al sacar raiz obtenemos $\|\bar{x}+\bar{y}\|\leq \|\bar{x}\|+\|\bar{y}\|$ (d) Si $\|\bar{x}\|=0$ se tiene entonces $\sqrt{x_1^2+\ldots+x_n^2}=0$ es decir $x_1^2+\ldots+x_n^2=0$ pero $x^2\geq 0~~\therefore~~x_i^2=0~~\forall~ i=1,\ldots,n$ $\therefore~~\bar{x}=0$ $\blacksquare$ El concepto general de Norma en $\mathbb{R}^n$. Las propiedades de la norma euclidiana nos ayudan para definir la noción abstracta de Norma. Definición.Una norma en $\mathbb{R}^n$ es cualquier función $\|\,\|:\mathbb{R}^n \rightarrow \mathbb{R}$ que satisface las siguientes propiedades que denominaremos Axiomas de Norma para cualesquiera $\bar{x},\bar{y}\,\in\,\mathbb{R}^n$ y toda $\alpha\,\in\,\mathbb{R}$ se cumple: (a) $\|\bar{x}\|\geq 0~~\|0\|=0$ (b) $\|\alpha\bar{x}\|=|\alpha|~\|\bar{x}\|$ (c) $\|\bar{x}+\bar{y}\|\leq \|\bar{x}\|+\|\bar{y}\|$ (d) $\|\bar{x}\|=0~~\Rightarrow~\bar{x}=0$ Proposición. Para toda norma $|\,|:\mathbb{R}^n \rightarrow\mathbb{R}$ se cumple: (a) $\|-\bar{x}\|=\|\bar{x}\|~~\forall \, x \in \mathbb{R}^n$ (b) $|\|\bar{x}\|-\|\bar{y}\||\leq \|\bar{x}-\bar{y}\|~~\forall \, \bar{x},\bar{y} \in \mathbb{R}^n$ Proposición. (a) $\|-\bar{x}\|=|-1|~\|\bar{x}\|=\|\bar{x}\|$ (b) $0\leq \|\bar{x}\|=\|\bar{x}-\bar{y}+\bar{y}\|\leq\|\bar{x}-\bar{y}\|+\|\bar{y}\|$ $\therefore$ $\|\bar{x}\|-\|\bar{y}\|\leq\|\bar{x}-\bar{y}\|$ Intercambiando $\bar{x}$ por $\bar{y}$ obtenemos $\|\bar{y}\|-\|\bar{x}\|\leq\|\bar{y}-\bar{x}\|=\|\bar{x}-\bar{y}\|$ $\therefore$ $|\|\bar{y}\|-\|\bar{x}\||\leq \|\bar{x}-\bar{y}\|.~~\blacksquare$
Ejemplo. Sea $I=[0,1]$. Demsotrar que $\|f\|=\sup {|f(x)|}$. Es una norma de $C[0,1]$ Solución. (a) Recordar que toda función real continua definida en un intervalo cerrado es acotada, por tanto $\|f\|$ está bien definida. (b) Puesto que $|f(x)|\geq 0~\forall~x\in I$ entonces $\|f\|\geq 0$ y además, $\|f\|= 0$ sii $|f(x)|= 0~\forall~x\in I$, i.e. sii $f=0$. (c) Recordemos un resultado: Sean $a$ y $b$ números reales tales que $a\leq b+\varepsilon$. Demostrar que $a \leq b$ Supongase que $a>b$ entonces $a=b+\delta,~~\delta >0$ tomamos $$\displaystyle\frac{\delta}{2}=\varepsilon$$ entonces $$a > b+\delta > b +\displaystyle\frac{\delta}{2}=b+\varepsilon~ \underset{\circ}{\bigtriangledown}$$ $\therefore~a\leq b$ ahora sea $\varepsilon > 0$. Entonces existe $x_0\in I$ tal que \[\begin{array}{ll} |f+g|& = \sup{|f(x)+g(x)|}\\ \, & \leq |f(x_0)+g(x_0)|+\varepsilon\\ \, & \leq |f(x_0)|+|g(x_0)|+\varepsilon\\ \, & \leq \sup{|f(x)|} +\sup{|g(x)|}+\varepsilon\\ \, & = |f|+|g| +\varepsilon \end{array}\] $\therefore~~\|f+g\| \leq \|f\|+\|g\|$ (d) Sea $k\in \mathbb{R}$ entonces \[\begin{array}{ll} \|kf\| & = \sup{|kf(x)|}\\ \, & = \sup{|k||f(x)|}\\ \, & = |k|\sup{|f(x)|}\\ \, & = |k|\|f(x)\|.~~\blacksquare\\ \end{array}\] Ejemplo. Demostrar que $\|f\|=\displaystyle\int_0^1|f(x)|dx$ es una norma de $C[0,1]$ (funciones continuas en el intervalo $[0,1]$). Solución (a) $\|f\|=\displaystyle\int_0^1|f(x)|dx\geq 0$ puesto que $$|f(x)|\geq 0\Rightarrow \displaystyle\int_0^1|f(x)|dx \geq 0$$ (b) Tenemos que \[\begin{array}{ll} \|kf\|& =\displaystyle\int_0^1|kf(x)|dx\\ \, & =\displaystyle\int_0^1|k||f(x)|dx\\ \, & =|k|\displaystyle\int_0^1|f(x)|dx\\ \, & = |k|\|f\| \end{array}\] (c) Tenemos que \[\begin{array}{ll} \|f+g\|& =\displaystyle\int_0^1|f(x)+g(x)|dx\\ \, & \leq \displaystyle\int_0^1[|f(x)|+|g(x)|]dx\\ \, & =\displaystyle\int_0^1|f(x)|dx + \displaystyle\int_0^1|g(x)|dx\ \, & = \|f\|+ \|g\|.~~\blacksquare \end{array}\] Ejemplo. Definición. Sea $\|\,\|_{p}:\mathbb{R}^n \rightarrow \mathbb{R}$ dada asi: $$\|x\|_{p}=\left(\sum_{i=1}^{n}|x_{i}|^{p}\right)^{\frac{1}{p}}$$ Vamos a demostrar que $|x|_{p}$ es una norma Solución. (a) Puesto que $|x_i|\geq 0,~~i=1,\ldots,n$ entonces $$\sum_{1}^{n}|x_i|^{p} \geq 0~~ \therefore \left( \sum_{1}^{n}|x_i|^{p}\right)^{\frac{1}{p}}\geq 0~~ \therefore \|x\|_{p}\geq 0$$ (b) Sea $\alpha\in\mathbb{R}$ y $\bar{x}\in\mathbb{R}^n$. Se tiene entonces que $$\|\alpha \bar{x}\|_{p}=\left(\sum_{1}^{n}|\alpha x_i|^{p}\right)^{\frac{1}{p}}=\left(|\alpha|^{p}\sum_{1}^{n}| x_i|^{p}\right)^{\frac{1}{p}}=|\alpha|\left(\sum_{1}^{n}| x_i|^{p}\right)^{\frac{1}{p}}=|\alpha|~\|x\|_{p}$$ (c) Tenemos que $$\|\overline{x}\|_{p}=\left[|x_{1}|^{p}+…+|x_{n}|^{p}\right]^{\frac{1}{p}}$$ Ahora procederemos a demostrar que cumple con la propiedad de la desigualdad del triángulo, es decir que para $\overline{x},\overline{y}\in \mathbb{R}^{n}$ $$\|\overline{x}+\overline{y}\|_{p}\leq \|\overline{x}\|_{p}+\|\overline{y}\|_{p}$$ Para ello primero procederemos a demostrar lo siguiente Proposición. Sean p,q números reales tales que $p,q>1$ y $\displaystyle{\frac{1}{p}+\frac{1}{q}=1}$ entonces $$|ab|\leq \frac{|a|^{p}}{p}+\frac{|b|^{q}}{q}$$ Demostración. Consideremos la función $\varphi:[0,\infty)\rightarrow \mathbb{R}$ dada por $\varphi(t)=t^{m}-mt$ con $m=\frac{1}{p}$ se tiene que $\varphi^{\prime}(t)=mt^{m-1}-m=m\left(t^{m-1}-1\right)$ por lo que $\varphi^{\prime}(t)=0\Leftrightarrow m\left(t^{m-1}-1\right)=0\Leftrightarrow t=1$ por lo tanto $t=1$ es un punto crítico de la función, ahora volvemos a derivar $\varphi^{\prime\prime}(t)=m(m-1)t^{m-2}$ que en $t=1$ es $<0$ por lo tanto en $t=1$, $\varphi$ alcanza un punto máximo $\therefore$ $\varphi(t)\leq \varphi(1)\Rightarrow t^{m}-mt\leq mt-m\Rightarrow t^{m}-1\leq m(t-1)$ Ahora hacemos $\displaystyle{t=\frac{|a|^{p}}{|b|^{q}}}$ y sustituimos $$\displaystyle{\left(\frac{|a|^{p}}{|b|^{q}}\right)^{\frac{1}{p}}-1\leq \frac{1}{p}\left(\frac{|a|^{p}}{|b|^{q}}-1\right)}$$ multiplicando ambos miembros de la desigualdad por $|b|^{q}$ se tiene que $$\left(|b|^{q}\right)\left(\left(\frac{|a|^{p}}{|b|^{q}}\right)^{\frac{1}{p}}-1\right)\leq \left(|b|^{q}\right)\left(\frac{1}{p}\left(\frac{|a|^{p}}{|b|^{q}}-1\right)\right)$$ lo que nos queda $$|a||b|^{q-\frac{q}{p}}-|b|^{q}\leq \frac{|a|^{p}}{p}-|b|^{q}\Rightarrow |a||b|^{q-\frac{q}{p}}\leq \frac{|a|^{p}}{p}-\frac{|b|^{q}}{p}+|b|^{q}$$ como $\displaystyle{q-\frac{q}{p}=1}$ y $\displaystyle{-\frac{|b|^{q}}{p}+|b|^{q}=\frac{|b|^{q}}{q}}$ tenemos entonces $$|ab|\leq \frac{|a|^{p}}{p}+\frac{|b|^{q}}{q}.~~\square$$ Probaremos la desigualdad de Holder $$\boxed{\sum_{k=1}^{n}|a_{k}b_{k}|\leq \left[\sum_{k=1}^{n}|a_{k}|^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|b_{k}|^{q}\right]^{\frac{1}{q}}}$$ Demostración. Sea $\displaystyle{A=\left(\sum_{k=1}^{n}|a_{k}|^{p}\right)^{\frac{1}{p}}}$ y $\displaystyle{B=\left(\sum_{k=1}^{n}|b_{k}|^{q}\right)^{\frac{1}{q}}}$ y definimos $\displaystyle{a^{\prime}_{k}=\frac{a_{k}}{A}}$ y $\displaystyle{b^{\prime}_{k}=\frac{b_{k}}{B}}$ usando la desigualdad probada anteriormente se tiene \begin{align*}|a^{\prime}_{k}~b^{\prime}_{k}|&\leq \frac{|a^{\prime}_{k}|^{p}}{p}+\frac{|b^{\prime}_{k}|^{q}}{q}\\&\Rightarrow \sum_{k=1}^{n}|a^{\prime}_{k}b^{\prime}_{k}|\leq \sum_{k=1}^{n}\frac{|a^{\prime}_{k}|^{p}}{p}+\frac{|b^{\prime}_{k}|^{q}}{q}\\&=\sum_{k=1}^{n}\frac{|a^{\prime}_{k}|^{p}}{p}+\sum_{k=1}^{n}\frac{|b^{\prime}_{k}|^{q}}{q}\\&=\frac{1}{p}\sum_{k=1}^{n}|a^{\prime}_{k}|^{p}+\frac{1}{q}\sum_{k=1}^{n}|b^{\prime}_{k}|^{q}\\&=\frac{1}{p}\sum_{k=1}^{n}\left[\frac{a_{k}}{A}\right]^{p}+\frac{1}{q}\sum_{k=1}^{n}\left[\frac{b_{k}}{B}\right]^{q}\\&=\frac{1}{p}\frac{1}{A^{p}}\sum_{k=1}^{n}|a_{k}|^{p}+\frac{1}{q}\frac{1}{B^{q}}\sum_{k=1}^{n}|b_{k}|^{q}\end{align*} como $$A^{p}=\left(\left(\sum_{k=1}^{n}|a_{k}|^{p}\right)^{\frac{1}{p}}\right)^{p}=\left(\sum_{k=1}^{n}|a_{k}|^{p}\right)~~~y~~~ B^{q}=\left(\left(\sum_{k=1}^{n}|b_{k}|^{q}\right)^{\frac{1}{q}}\right)^{q}=\left(\sum_{k=1}^{n}|b_{k}|^{q}\right)$$ se tiene que \begin{align*}\frac{1}{p}\frac{1}{A^{p}}\sum_{k=1}^{n}|a_{k}|^{p}+\frac{1}{q}\frac{1}{B^{q}}\sum_{k=1}^{n}|b_{k}|^{q}&=\frac{1}{p}\frac{1} {\left(\sum_{k=1}^{n}|a_{k}|^{p}\right)}\sum_{k=1}^{n}|a_{k}|^{p}+\frac{1}{q}\frac{1}{\left(\sum_{k=1}^{n}|b_{k}|^{q}\right)}\sum_{k=1}^{n}|b_{k}|^{q}\\&=\frac{1}{p}+\frac{1}{q}=1\end{align*} Por lo tanto \begin{align*}\sum_{k=1}^{n}|a^{\prime}{k}b^{\prime}{k}|\leq 1 &\Rightarrow \sum_{k=1}^{n}|\frac{a_{k}}{A}\frac{b_{k}}{B}|\leq1\\&\Rightarrow \sum_{k=1}^{n}|a_{k}b_{k}|\leq AB\\ &\Rightarrow \sum_{k=1}^{n}|a_{k}b_{k}|\leq \left(\sum_{k=1}^{n}|a_{k}|^{p}\right)^{\frac{1}{p}}\left(\sum_{k=1}^{n}|b_{k}|^{q}\right)^{\frac{1}{q}}\end{align*} Ahora probaremos la desigualdad de Minkowski $$\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{p}}\leq \left[\sum_{k=1}^{n}|a_{k}|^{p}\right]^{\frac{1}{p}}+\left[\sum_{k=1}^{n}|b_{k}|^{q}\right]^{\frac{1}{q}}$$ Tenemos que \begin{align*}\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}=\sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}|a_{k}+b_{k}|&\leq \sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}\left(|a_{k}|+|b_{k}|\right)\\&=\left( \sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}\right)\left(|a_{k}|\right)+\left( \sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}\right)\left(|b_{k}|\right)\end{align*} Aplicando la desigualdad de Holder a cada sumando tenemos que \begin{align*}\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}\right)\left(|a_{k}|\right)&\leq \left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{q(p-1)}\right]^{\frac{1}{q}}\\&=\left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}\end{align*} \begin{align*}\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p-1}\right)\left(|b_{k}|\right)&\leq \left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{q(p-1)}\right]^{\frac{1}{q}}\\&=\left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}\end{align*} Por lo tanto $$\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\leq \left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}+\left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}$$ Multiplicando ambos miembros de la desigualdad por $$\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{-\frac{1}{q}}$$ obtenemos \begin{align*}\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right)\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{-\frac{1}{q}}&=\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right)^{1-\frac{1}{q}}\\&=\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right)^{\frac{1}{p}}\end{align*} $$\left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}\left(\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{-\frac{1}{q}}\right)=\left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}$$ $$\left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{\frac{1}{q}}\left(\left[\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right]^{-\frac{1}{q}}\right)=\left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}$$ Por lo tanto $$\left(\sum_{k=1}^{n}|a_{k}+b_{k}|^{p}\right)^{\frac{1}{p}}\leq \left[\sum_{k=1}^{n}a_{k}^{p}\right]^{\frac{1}{p}}+\left[\sum_{k=1}^{n}b_{k}^{p}\right]^{\frac{1}{p}}$$ Por lo tanto $$\|\overline{x}+\overline{y}\|_{p}\leq \|\overline{x}\|_{p}+\|\overline{y}\|_{p}~\blacksquare$$
Ejemplo. Espacios $\ell_{p}$
Definición. Dado $\bar{x}\in\mathbb{R}^{n}$ definimos $$\|\bar{x}\|_{p}=\left(\sum_{k=1}^{n}|x_{k}|^{p}\right)^{\frac{1}{p}}~~si~~p\in[1,\infty)$$ Proposición. Dada $p\in[1,\infty)$, consideramos el conjunto $\ell_{p}$ de todas las sucesiones $(x_{k})$ de números reales tales que la serie $$\sum_{k=1}^{\infty}|x_{k}|^{p}$$converge. Entonces la función $$\|(x_{k})\|_{p}=\left(\sum_{k=1}^{\infty}|x_{k}|^{p}\right)^{\frac{1}{p}}$$es una norma en $\ell_{p}$ Demostración. (a) Tenemos $$\|x_{k}\|_{p}\geq0\Leftrightarrow\left(\sum_{k=1}^{\infty}|x_{k}|^{p}\right)^{\frac{1}{p}}\geq0\Leftrightarrow\sum_{k=1}^{\infty}|x_{k}|^{p}\geq0\Leftrightarrow|x_{k}|^{p}\geq0\Leftrightarrow |x_{k}|\geq0\Leftrightarrow x_{k}\geq0$$ (b) $$\|\lambda x_{k}\|_{p}=\left(\sum_{k=1}^{\infty}|\lambda x_{k}|^{p}\right)^{\frac{1}{p}}=\left(\sum_{k=1}^{\infty}|\lambda|^{p} |x_{k}|^{p}\right)^{\frac{1}{p}}=\left(|\lambda|^{p}\sum_{k=1}^{\infty} |x_{k}|^{p}\right)^{\frac{1}{p}}=|\lambda|\left(\sum_{k=1}^{\infty}|x_{k}|^{p}\right)^{\frac{1}{p}}=|\lambda|~\|x_{k}\|_{p}$$ (c) Como la $\|\|_{p}$ satisface la desigualdad del triángulo, se tiene que $$\left(\sum_{k=1}^{n} |x_{k}+y_{k}|^{p}\right)^{\frac{1}{p}}\leq \left(\sum_{k=1}^{\infty} |x_{k}|^{p}\right)^{\frac{1}{p}}+\left(\sum_{k=1}^{\infty} |y_{k}|^{p}\right)^{\frac{1}{p}}\leq\|x_{k}\|_{p}+\|y_{k}\|_{p}$$ para todo $n\in \mathbb{N}$. En consecuencia, la serie $$\sum_{k=1}^{\infty} |x_{k}+y_{k}|^{p}$$ converge y se cumple que $$\|x_{k}+y_{k}\|_{p}=\left(\sum_{k=1}^{\infty} |x_{k}+y_{k}|^{p}\right)^{\frac{1}{p}}\leq\|x_{k}\|_{p}+\|y_{k}\|_{p}.~~\textcolor{orange}{\blacksquare}$$ Proposición. Sea $\bar{x}\in\mathbb{R}^{n}$, entonces $$\|\bar{x}\|_{\infty}\leq\|\bar{x}\|\leq\|\bar{x}\|_{1}\leq n\|\bar{x}\|$$
Demostración. Sea $|x_{k}|=\max{|x_{1},…,|x_{n}||}$ Se tiene entonces $$|x_{k}|=\sqrt{x_{k}^{2}}\leq \sqrt{x_{1}^{2}+…+x_{n}^{2}}=\|\bar{x}\|$$ $\therefore~~\|\bar{x}\|_{\infty}\leq\|\bar{x}\|$ Ahora bien $$\left(\|\bar{x}\|\right)^{2}=\left(|x_{1}|^{2}+…+|x_{n}|^{2}\right)\leq \sum_{i=1}^{n}|x_{i}|^{2}+2\sum_{i\leq i\leq j\leq n}|x_{i}||x_{j}|=\left(|x_{1}|+…+|x_{n}|\right)^{2}=\left(\|\bar{x}\|_{1}\right)^{2}$$ $$~\Rightarrow~\left(\|\bar{x}\|\right)^{2}\leq\left(\|\bar{x}\|_{1}\right)^{2}$$ $$~\Rightarrow~\|\bar{x}\|\leq \|\bar{x}\|_{1}$$ También si suponemos que $|x_{j}|=\max{|x_{1}|,…,|x_{n}|}$ entonces $$\|\bar{x}\|_{1}=|x_{j}|\leq |x_{j}|+…+|x_{j}|=n|x_{j}|=n\max{|x_{1}|,…,|x_{j}|}=n\|\bar{x}\|_{\infty}$$ por lo que $$\|\bar{x}\|_{1}\leq n\|\bar{x}\|_{\infty}.~~ \blacksquare$$
Proposición. Sea $\bar{x}\in\mathbb{R}^{n}$ entonces $$\|\bar{x}\|_{\infty}\leq\|\bar{x}\|\leq\sqrt{n}\|\bar{x}\|_{\infty}$$ Demostración. Suponemos que $|x_{j}|=\max{|x_{1}|,…,|x_{n}|}$. Se tiene entonces $$|x_{j}|=\sqrt{x_{j}^{2}}\leq \sqrt{x_{1}^{2}+…+x_{j}^{2}+…+x_{n}^{2}}=\|\bar{x}\|$$ Por tanto $$\|\bar{x}\|_{\infty}\leq\|\bar{x}\|$$ Por otro lado suponemos que $|x_{j}|=\max{|x_{1}|,…,|x_{n}|}$ y tenemos $$\|\bar{x}\|=\sqrt{x_{1}^{2}+…+x_{j}^{2}+…+x_{n}^{2}}\leq \sqrt{x_{j}^{2}+…+x_{j}^{2}+…+x_{j}^{2}}=\sqrt{n(x_{j}^{2})}=\sqrt{n}\|\bar{x}\|_{\infty}$$ por lo tanto $$\|\bar{x}\|\leq\sqrt{n}\|\bar{x}\|_{\infty}.~~\blacksquare$$
Proposición. Sea $\bar{x}\in\mathbb{R}^{n}$ entonces $$\|\bar{x}\|_{1}\leq\sqrt{n}\|\bar{x}\|$$ Demostración. $$\|\bar{x}\|_{1}=|x_{1}|+…+|x_{n}|=\left(1,…,1\right)\cdot (|x_{1}|,…,|x_{1}|)\leq \|(1,…,1)\|~\|\bar{x}\|=\sqrt{n}\|\bar{x}\|$$ por lo tanto $$\|\bar{x}\|_{1}\leq\sqrt{n}\|\bar{x}\|.~~\blacksquare$$
Ortogonalidad de vectores
Generalizando el concepto de perpendicularidad en $\mathbb{R}^{3}$, damos la siguiente definición. Definición. Sea E un espacio vectorial dotado de un producto escalar $\langle,\rangle$, se dice que dos vectores $\overline{x},\overline{y}\in E$ son ortogonales si $$\langle \overline{x},\overline{y}\rangle=0$$ Tenemos que si $\langle \overline{x},\overline{y}\rangle=0$ entonces $$\|\overline{x}-\overline{y}\|^{2}=\langle \overline{x}+\overline{y},\overline{x}+\overline{y}\rangle=\langle \overline{x},\overline{x}\rangle-2\langle \overline{x},\overline{y}\rangle+\langle \overline{y},\overline{y}\rangle=\langle \overline{x},\overline{x}\rangle+\langle \overline{y},\overline{y}\rangle=\|\overline{x}\|^{2}+\|\overline{y}\|^{2}$$ es decir se cumple el teorema de pitagoras.
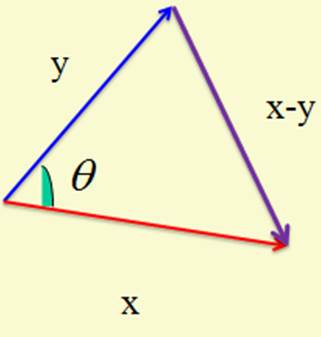
Sean ahora $\overline{x},\overline{y}\in \mathbb{R}^{2}$ y sea $\theta$ el ángulo entre ellos. Según la ley de los cosenos \begin{align*} \|\overline{x}-\overline{y}\|^{2}&=\|\overline{x}\|^{2}+\|\overline{y}\|^{2}-2\|\overline{x}\|\|\overline{y}\|\cos(\theta) \\ &~\Rightarrow~\|\overline{x}\|^{2}-2\langle \overline{x},\overline{y}\rangle+\|\overline{y}\|^{2}=\|\overline{x}\|^{2}+\|\overline{y}\|^{2}-2\|\overline{x}\|\|\overline{y}\|\cos(\theta) \\ &~\Rightarrow~\langle \overline{x},\overline{y}\rangle=\|\overline{x}\|\|\overline{y}\|\cos(\theta) \end{align*} Esta fórmula motiva la siguiente definición de ángulo $\theta$ entre dos vectores no nulos $\overline{x},\overline{y}\in E$, por medio de $$\boxed{\theta=\arccos\left(\frac{\langle \overline{x},\overline{y}\rangle}{|\overline{x}||\overline{y}|}\right)}$$
.
Más adelante
Como vimos en este apartado el concepto de norma nos permite relacionar la idea de longitud de un vector respecto al origen. De forma más extensa nos ayudará a relacionar la idea de longitud entre dos vectores como una distancia subyacente entre esos dos objetos.
Tarea moral
1.- Dada $f\in C^0[a,b]$ demuestra que $\left\| f\right\| _{p}= (\int _a^b |f(x)|^pdx)^{1/p}$ si $p \in [1,\infty)$ si $p\in [1,\infty)$ es una norma.
2.- Demuestra que $\left\| f\right\|_{\infty}=max\{|f(x)|:a\leq x\leq b \}$ es una norma .
3.- Sea $f\in C^0[a,b]$ y $p\in [1,\infty]$ demuestra que $\left\| f\right\|_p=0$ sí y solo si $f=0$. 4.- Demuestra la desigualdad de Minkowski para integrales. Si $p\in[1,\infty]$ entonces $\left\| f + g \right\|\leq | f | + |g| $ $\forall f,g\in C^0[a,b]$
5.- Expresa el siguiente caso al vector a como la suma de un vector paralelo al vector b y uno ortogonal. Donde $a=(1,2,3)$, $b=(1,0,0)$.
Enlaces
El siguiente enlace muestra un código en python que te va a permitir visualizar la gráfica de la norma p dada por:
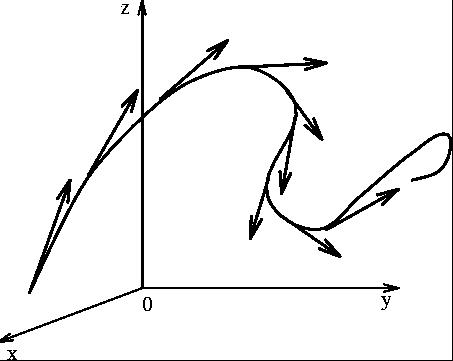
Las fórmulas de Frenet–Serret describen la geometría local de una curva suave en el espacio usando una triada de vectores unitarios que se desplaza a lo largo de la curva. Son fundamentales en cálculo diferencial de curvas y por tanto en sus aplicaciones inmediatas como en física, mecánica, robótica, entre otras.
Dada una curva $f:[a,b]\rightarrow\mathbb{R}^{n}$, el Vector Unitario Tangente $T$ es otra función vectorial asociada a la curva, y está definida por: $$\boxed{T(t)=\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\ \ \ \ \text{siempre que $|f^{\prime}(t)| \neq 0$.}}$$ De acuerdo a la definición anterior tenemos $$\|T(t)\|=\left\|\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right\|=\frac{\|f'(t)\|}{\|f'(t)\|}=1$$ y de acuerdo a lo anterior \begin{align*} \|T(t)\|=1 &~\Rightarrow~T(t)\cdot T(t)=1 \\ &~\Rightarrow~\frac{d}{dt}(T(t)\cdot T(t))=0 \\ &~\Rightarrow~T'(t)\cdot T(t)+T(t)\cdot T'(t)=0 \\ &~\Rightarrow~2(T'(t)\cdot T(t))=0 \\ &~\Rightarrow~T'(t)\cdot T(t)=0 \end{align*} lo que implica que $T'(t)$ es ortogonal $T(t)$. Si $T^{\prime}\neq 0$ el vector unitario que tiene la misma dirección que $T^{\prime}$ se llama Vector Normal Principal a la curva y se designa por $N(t)$. Asi pues $N(t)$ es una nueva función vectorial asociada a la curva y esta dada por la ecuación: $$\boxed{N(t)=\frac{T^{\prime}(t)}{\|T^{\prime}(t)\|}\ \ \ \ \text{si}\ \ \ \ \ \|T^{\prime}(t)\| \neq 0}$$ de acuerdo a lo visto con el vector tangente, se tiene que $T(t)$ y $N(t)$ son ortogonales. Un tercer vector definido mediante $$\boxed{B(t)=T(t)\times N(t)}$$ recibe el nombre de Vector Binormal. Notese que $$\|B(t)\|=\|T(t)\times N(t)\|=\|T(t)\|\|N(t)\|\sin\left(\frac{\pi}{2}\right)=1$$ de acuerdo a lo anterior \begin{align*} \|B(t)\|=1&~\Rightarrow~B(t)\cdot B(t)=1 \\ &~\Rightarrow~\frac{d}{dt}(B(t)\cdot B(t))=0 \\ &~\Rightarrow~B'(t)\cdot B(t)+B(t)\cdot B'(t)=0\\ &~\Rightarrow~ 2(B'(t)\cdot B(t))=0\\ &~\Rightarrow~B'(t)\cdot B(t)=0 \end{align*} por tanto $B'(t)$ es ortogonal a $B(t)$. Es decir $\boxed{B'(t)\cdot B(t)=0}$
Ejemplo. Pruebe que $\displaystyle{B'(t)\cdot T(t)=0}$ Solución. Si $B(t)=T(t)\times N(t)$ entonces $B(t)$ es ortogonal a $T(t)$ y $B(T)$ es ortogonal a $N(t)$ y por lo tanto $B(t)\cdot T(t)=0$ Por otro lado $$N(t)=\frac{T(t)}{\|T'(t)\|}~\Rightarrow~\|T'(t)\|~N(T)=T'(t)$$ Si $B(t)$ es ortogonal a $N(t)$ entonces $B(t)$ es ortogonal a $\|T'(t)\|~N(T)$. Por lo tanto $$B(t)\cdot T'(t)=B(t)\cdot \|T'(t)\|~N(T)=0$$ Tenemos entonces que \begin{align*} \frac{d}{dt}(B(t)\cdot T(t))=0&~\Rightarrow~B'(t)\cdot T(t)+B(t)\cdot T'(t)=0 \\ &~\Rightarrow~B'(t)\cdot T(t)+0=0 \\ &~\Rightarrow~B'(t)\cdot T(t)=0 \end{align*} Por lo tanto $\boxed{B'(t)\cdot T(t)=0}$.$~~\blacksquare$ Según los resultados anteriores $B'(t)\cdot B(t)=0$ y $B'(t)\cdot T(t)=0$. Pero también $N(t)\cdot B(t)=0$ y $N(t)\cdot T(t)=0$. Por lo tanto $N(t)$ y $B'(t)$ deben ser paralelos, es decir existe $\alpha$ tal que $\boxed{B'(t)=\alpha N(t)}$. Si la curva está parametrizada por longitud de arco, considerando que $\|\overline{f}'(s)\|=1$, se tiene \begin{align*} T(s) & =\overline{f}'(s) \\ N(s) & =\frac{\overline{f}»(s)}{|\overline{f}»(s)|} \\ B(s) & =T(s)\times N(s) \end{align*} $\fbox{Fórmulas de Frenet-Serret}$ El sistema de vectores ${T(t),N(t),B(t)}$ forman un triedro en el cual $$\boxed{B(t)=T(t)\times N(t)}$$ de acuerdo a la definición anterior \begin{align*} B(t)=T(t)\times N(t)&~\Rightarrow~N(t)\times B(t)=N(t)\times (T(t)\times N(t)) \\ &~\Rightarrow~N(t)\times B(t)=(N(t)\cdot N(t))T(t)-(N(t)\cdot T(t))N(t) \\ &~\Rightarrow~N(t)\times B(t)=T(t)-0\cdot N(t) \\ &~\Rightarrow~N(t)\times B(t)=T(t) \end{align*} por tanto $$\boxed{N(t)\times B(t)=T(t)}$$ Análogamente de acuerdo a la definición anterior \begin{align*} B(t)=T(t)\times N(t)&~\Rightarrow~B(t)\times T(t)=(T(t)\times N(t))\times T(t) \\ &~\Rightarrow~B(t)\times T(t)=(T(t)\cdot T(t))N(t)-(N(t)\cdot T(t))T(t) \\ &~\Rightarrow~B(t)\times T(t)=N(t)-0\cdot T(t) \\ &~\Rightarrow~B(t)\times T(t)=N(t) \end{align*} por tanto $$\boxed{B(t)\times T(t)=N(t)}$$ Por que dicho sistema de vectores, es un conjunto ortonormal. Las fórmulas que dan las derivadas del triedro móvil, en términos del mismo triedro móvil, se llaman las fórmulas de Frenet-Serret. Teorema (a) $\displaystyle{\frac{dT}{ds}=\kappa N}$ (b) $\displaystyle{\frac{dB}{ds}=-\tau N(s)}$ (c) $\displaystyle{\frac{dN}{ds}=\tau B-\kappa T}$ $\fbox{Demostración}$ (a) Por definición $\displaystyle{N(s)=\frac{T'(s)}{\|T'(s)\|}}$ y $\displaystyle{\kappa(s)=\left\|\frac{dT}{ds}\right\|=\|f»(s)\|}$. Luego $$T'(s)=\|T'(s)\|~N(s)=\kappa(s)~N(s).$$ (b) $\displaystyle{\frac{dB}{ds}=-\tau N(s)}$ es fórmula de definición de torsión. (c) \begin{align*} N'(s)&=B'(s)\times T(s)+B(s)\times T'(s) \\ &=-\tau N(s)\times T(s)+B(s)\times \kappa N(s) \\ &=\tau T(s)\times N(s)-\kappa N(s)\times B(s) \\ &=\tau B(s)-\kappa T(s).~~\blacksquare \end{align*}
Más adelante
La siguiente entrada corresponde a la Unidad 2. El objetivo de la unidad es comprender las estructuras que permiten analizar el comportamiento de funciones y vectores en espacios más generales que la recta o el plano. Dos conceptos clave para ello son los espacios normados y la topología.
Tarea Moral
1.- Sea la curva $\mathbf{r}(t)=(t^2,t^3,t)$ a) Calcula el vector tangente unitario $T(t)$. b) Calcula el vector normal $N(t)$. c) Verifica que $T(t)\cdot N(t)=0$.
2.- Sea la curva $\mathbf{r}(t)=(t,t^2,t^3)$
a) Calcula $\mathbf{r}'(t)$ y $\mathbf{r}»(t)$.
b) Usa la fórmula de la curvatura $\kappa(t)=\frac{\|\mathbf{r}'(t)\times \mathbf{r}»(t)\|}{\|\mathbf{r}'(t)\|^3}$. Encuentra la curvatura en $t=1$.
3.-Sea $\gamma(t)=(a\cos(wt), a \sin(wt), bt), t\in \mathbb{R}$
a) Calcula la prametrización por longitud de arco de esta curva.
b) Calcula los vectores $T(s), N(s) y B(s)$ en cada punto de esta curva.
4.- Dada la hélice $\mathbf{r}(t)=(\cos t,\sin t,t)$
a) Calcula los vectores $T(t)$, $N(t)$ y $B(t)$. b) Verifica que forman un sistema ortonormal, es decir, $T\cdot N=N\cdot B=B\cdot T=0.$
5.- Sea $\mathbf{r}(t)$ una curva regular en $\mathbb{R}^3$ parametrizada por longitud de arco $s$, y sea $T(s)=\frac{d\mathbf{r}}{ds}$ su vector tangente unitario. Demuestra que el vector derivada $\dfrac{dT}{ds}$ es ortogonal a $T(s)$; es decir, $T(s)\cdot \frac{dT}{ds}=0$
Sugerencia: utiliza que $T(s)$ es unitario, es decir, $T(s)\cdot T(s)=1.$ Deriva esta igualdad respecto a $s$.
Enlaces
El siguiente enlace de geogebra contiene un interactivo que muestra como el plano osculador recorre una curva parametrizada. Aunque el ejemplo contiene una curva definida, tú puedes construir tu propio ejemplo definiendo las entradas de la curva con nombre f, g y h.
Es importante notar que en la construcción se define primero el vector tangente en un punto (usando un deslizador)
En el estudio del cálculo diferencial, las curvas no solo se analizan por su forma visible, sino también por cómo cambian localmente en cada punto. Conceptos como la curvatura, el radio de curvatura, el círculo osculador y la torsión permiten describir con precisión el comportamiento geométrico de una curva tanto en el plano como en el espacio.
En una recta, el vector unitario tangente $T$ no cambia su dirección y por tanto $T^{\prime}=0$. Si la curva no es una linea recta, la derivada $T^{\prime}$ mide la tendencia de la tangente a cambiar su dirección. El coeficiente de variación o derivada de la tangente unitaria respecto a la longitud de arco se denomina vector curvatura de la curva. Se designa por $\displaystyle{dT/ds}$ donde s representa la longitud de arco.
Sea $f:[a,b]\subset\mathbb{R}\rightarrow\mathbb{R}^{n}$ una curva dos veces diferenciable parametrizada por longitud de arco y T su vector tangente unitario. La curvatura de f es la función $$\kappa=\left\|\frac{dT}{ds}\right\|=\|f^{\prime\prime}(s)\|$$ La letra $\kappa$ es la letra griega kappa. La curvatura mide la flexión de la curva. Mostraremos que una recta, es una curva que no se flexiona, tiene curvatura 0 Ejemplo. Calcule la curvatura en todo punto de la recta $f(t)=(x_{0},y_{0},z_{0})+t(u_{1},u_{u},u_{3})$ donde $\|u\|=1$ tenemos: \[ f^{\prime}(t)=(u_{1},u_{2},u_{3})\ \ \ \ \ \text{y}\ \ \ \ \ \|f^{\prime}(t)\|=\|u\|=1 \] Por lo tanto la curva esta parametrizada por longitud de arco Por lo tanto $\kappa=\|f^{\prime\prime}(t)\|=0$, por lo tanto $\kappa=0$.$~~\blacksquare$ Ejemplo Calcule la curvatura de una circunferencia. Para un círculo de radio $R$ dado por la ecuación $$f(t)=(R\cos t,R \sin t)$$ tenemos: La parametrizacion por longitud de arco es: $$s=\int_{0}^{t}\|f'(u)\|du=\int_{0}^{t}Rdt=Rt~\rightarrow~s=Rt~\Rightarrow~t=\frac{s}{R}$$ de esta manera se tiene \begin{align*} \overline{f}(s) &=f\left(\frac{s}{R}\right)=\left(R\cos\left(\frac{s}{R}\right),R\sin\left(\frac{s}{R}\right)\right) \\ \overline{f}^{\prime}(s)&=\left(-\sin \left(\frac{s}{R}\right), \cos \left(\frac{s}{R}\right)\right) \\ \overline{f}^{\prime\prime}(s)&=\left(-\frac{1}{R}\cos \left(\frac{s}{R}\right),-\frac{1}{R} \sin \left(\frac{s}{R}\right)\right) \end{align*} Por lo tanto $\displaystyle{\kappa=\|\overline{f}^{\prime\prime}(s)\|=\frac{1}{R}}$. Esto prueba que una circunferencia tiene curvatura constante. El siguiente teorema nos proporciona otras fórmulas que nos permiten calcular la curvatura parametrizada por otro parámetro t, que no es necesariamente la longitud de arco. Teorema. Sea $f(t)$ una curva dos veces diferenciable. Entonces $$\kappa(t)=\frac{\|T'(t)\|}{\|f'(t)\|}$$ Demostración. Sabemos que $\displaystyle{s^{\prime}(t)=\|f^{\prime}(t)\|}$. Además usando la regla de la cadena $\begin{align*} T'(t)&=\frac{dT}{dt}=\frac{dT}{ds}\frac{ds}{dt}=\frac{dT}{ds}\|f'(t)\| \\ &~\Rightarrow~\frac{dT}{ds}=\frac{T'(t)}{\|f'(t)\|} \\ &~\Rightarrow~\left\|\frac{dT}{ds}\right\|=\frac{\|T'(t)\|}{\|f'(t)\|} \\ &~\Rightarrow~\kappa(t)=\frac{\|T'(t)\|}{\|f'(t)\|}.~~ \blacksquare \end{align*}$ Ejemplo. Calcule la curvatura $\kappa$ de la hélice $x(t)=a\cos(wt)$, $y(t=a\sin(wt))$, $z(t)=bt$. Solución. Tenemos que: \[f^{\prime}(t)=(-wa\sin(wt),aw\cos(wt),b)\ \ \Rightarrow\ \ \|f^{\prime}(t)\|=\sqrt{a^2w^2+b^2}\] Por lo tanto \[ T=(-aw\sin(wt),aw\cos(wt),b)\frac{1}{\sqrt{a^2w^2+b^2}} \] Por lo tanto \[ k=\frac{\|T^{\prime}\|}{\|f^{\prime}\|}= \|-aw^2\cos(wt),-aw^2\sin(wt),0\|\frac{1}{\sqrt{a^2w^2+b^2}}= \] \[ =\sqrt{(aw^2)^2(\cos^2(wt)+\sin^2(wt))}\ \frac{1}{\sqrt{a^2w^2+b^2}}= \frac{aw^2}{\sqrt{a^2w^2+b^2}}.~~ \blacksquare \]
Teorema . Sea $f(t)$ una curva dos veces diferenciable. Entonces $$\kappa(t)=\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{3}}$$ Demostración. Si $$T=\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\Rightarrow T~\|f^{\prime}(t)\|=f^{\prime}(t)\Rightarrow T\frac{ds}{dt}=f^{\prime}(t)$$Por lo tanto $$f^{\prime\prime}(t)=T\frac{d^{2}s}{dt^{2}}+\frac{ds}{dt}T^{\prime}$$ Haciendo el producto cruz $$f^{\prime}(t)\times f^{\prime\prime}(t)=T\frac{ds}{dt}\times \left(T\frac{d^{2}s}{dt^{2}}+\frac{ds}{dt}T^{\prime}\right)=\cancel{T\frac{ds}{dt}\times T\frac{d^{2}s}{dt^{2}}}+T\frac{ds}{dt}\times \frac{ds}{dt}T^{\prime}$$Por lo tanto $$\|f^{\prime}(t)\times f^{\prime\prime}(t)\|=\left\|T\frac{ds}{dt}\times \frac{ds}{dt}T^{\prime}\right\|=\left(\frac{ds}{dt}\right)\left\|T\right\|\left(\frac{ds}{dt}\right)\left\|T^{\prime}\right\|\sin(T,T^{\prime})=\left(\frac{ds}{dt}\right)^{2}\left\|T^{\prime}\right\|$$En cosecuencia$$\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\left(\frac{ds}{dt}\right)^{2}}=\|T^{\prime}|\Rightarrow \|T^{\prime}\|=\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{2}}$$ sustituimos en $$k(t)=\frac{\|T^{\prime}(t)\|}{\|f^{\prime}(t)\|}\Rightarrow \kappa(t)=\frac{\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{2}}}{\|f^{\prime}(t)\|}\Rightarrow \kappa(t)=\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{3}}.~~ \blacksquare $$ Ejemplo. Hallar la función curvatura $\kappa(t)$ de la curva $$f(t)=\left(t^{2},t,\frac{2t^{3}}{3}\right)$$ Solución. Según la fórmula anterior \begin{align*} f'(t) & =(2t,1,2t^{2}) \\\ f^{\prime\prime}(t) & =(2,0,4t) \\ \|f'(t)\| & =\sqrt{4t^{2}+1+4t^{4}}=2t^{2}+1 \end{align*} Por lo que \begin{align*} f'(t)\times f^{\prime\prime}(t) & =\left|\begin{matrix}i&j&k\\2t&1&2t^{2}\\2&0&4t\end{matrix}\right| \\ & =2(2t,-2t^{2},-1) \\ \|f'(t)\times f^{\prime\prime}(t)\|&=2\sqrt{4t^{2}+4t^{4}+1}=2(2t^{2}+1) \end{align*} Luego $$\kappa(t)=\frac{\|f^{\prime}(t)\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{3}}=\frac{2(2t^{2}+1)}{(2t^{2}+1)^{3}}=\frac{2}{(2t^{2}+1)^{2}}.~~ \blacksquare $$ Ejemplo. Para el caso especial de una curva plana con ecuación $y=f(x)$ podemos escoger $x$ como el parámetro y escribir $r(x)=x\hat{i}+f(x)\hat{j}$ entonces \begin{align*}r^{\prime}(x)&=\hat{i}+f^{\prime}(x)\hat{j}\\r^{\prime \prime}(x)&=f^{\prime \prime}(x)\hat{j}\end{align*} y al efectuar: \[ r^{\prime}(x)\ \text{x}\ r^{\prime \prime}(x)= \left| \begin{array}{ccc} \hat{i} & \hat{j} & \hat{k} \\ 1 & f^{\prime}(x) & 0 \\ 0 & f^{\prime \prime}(x) & 0 \\ \end{array} \right|= f^{\prime \prime}(x)\hat{k} \]
Por lo tanto $\|r^{\prime}(x)\ \times r^{\prime\prime}(x)\|=|f^{\prime\prime}(x)|$. Por lo tanto, para una curva plana \[ \kappa(x)=\frac{\|r'(t)\times r^{\prime\prime}(t)\|}{\|r'(t)\|^{3}}=\frac{|f^{\prime\prime}(x)|}{\left(1+[f^{\prime}(x)]^2\right)^{3/2}}.~~ \blacksquare \] Ejemplo. Calcular la curvatura del gráfico $f(x)=e^{-x}$. Solución. Tenemos que: $f'(x)=-e^{-x}$ y $f^{\prime\prime}(x)=e^{-x}$. Luego $$\kappa(x)=\frac{|f^{\prime\prime}(x)|}{\left[1+\left(f'(x)\right)^{2}\right]^{\frac{3}{2}}}=\frac{e^{-x}}{\left[1+\left(-e^{-x}\right)^{2}\right]^{\frac{3}{2}}}=\frac{e^{-x}}{\left[e^{-2x}+1\right]^{\frac{3}{2}}}.~~ \blacksquare$$
Circunferencia y radio de curvatura
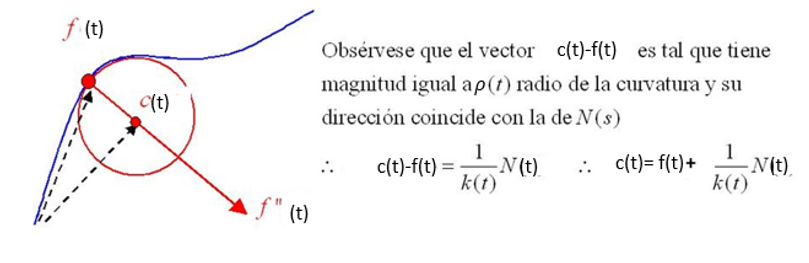
Sea $f:[a,b]\rightarrow\mathbb{R}^{2}$ una curva plana y un punto $P$ sobre una curva plana donde $\kappa\neq 0$. Se llama circunferencia de curvatura o circunferencia osculadora de la curva en el punto P a la circunferencia que cumple las siguientes condiciones: (a) Es tangente a la curva en P. (la circunferencia y la curva tienen la misma recta tangente en el punto P). (b) Tiene la misma curvatura ($\kappa$) que la curva en P. (c) Se encuentra hacia el lado concavo o interior de la curva. (d) El radio de la curvatura de la curva P es el radio del círculo de curvatura o círculo osculador. $$\rho(t)=\frac{1}{\kappa(t)}$$
Asi el centro del círculo osculador (llamado centro de curvatura) debe estar en:
\[ c(t)=f(t)+\frac{1}{k(t)}N(t) \] Ejemplo. Determine los vectores $T$ y $N$, la curvatura $k$, el centro de la curvatura y la circunferencia osculadora de la parábola $y=x^2$ en el punto $(1,1)$. Solución. Si la parábola esta parametrizada por $x=t$ y por $y=t^2$, entonces su vector de posición es $f(t)=(t,t^2)$, por lo tanto \begin{align*}f(t)=(t,t^2)&\Rightarrow f^{\prime}(t)=(1,2t)\\&\Rightarrow\|f^{\prime}(t)\|=\sqrt{1+4t^2}\\&\Rightarrow f^{\prime\prime}(t)=(0,2)\end{align*} por lo tanto: \[ T(t)=\frac{(1,2t)}{\sqrt{1+4t^2}}\ \ \ \ \ \ \ T(1)=\left(\frac{1}{\sqrt{5}},\frac{2}{\sqrt{5}}\right)\ \ \ \ \ \ \ N(1)=\left(\frac{-2}{\sqrt{5}},\frac{1}{\sqrt{5}}\right) \] la curvatura $\kappa$, \[ k=\frac{\|f^{\prime\prime}(t)\|}{\left(\sqrt{1+[f^{\prime}(t)]^2}\right)^3}= \frac{2}{\left(\sqrt{1+4t^2}\right)^3}\ \ \ \ \ \ \ k(1)=\frac{2}{5\sqrt{5}}\ \ \Rightarrow\ \ \rho=\frac{5\sqrt{5}}{2} \] Por lo tanto el centro de la curvatura es \[ c(t)=f(1,1)+\frac{1}{\frac{2}{5\sqrt{5}}}\left(\frac{-2}{\sqrt{5}},\frac{1}{\sqrt{5}}\right)= \left(-4,\frac{7}{2}\right) \] Y la ecuación del círculo osculador a la parábola es, por tanto: \[ (x+4)^2+\left(y-\frac{7}{2}\right)^2= \left(\frac{5\sqrt{5}}{2}\right)^2=\frac{125}{4}.~~ \blacksquare \]
Torsión
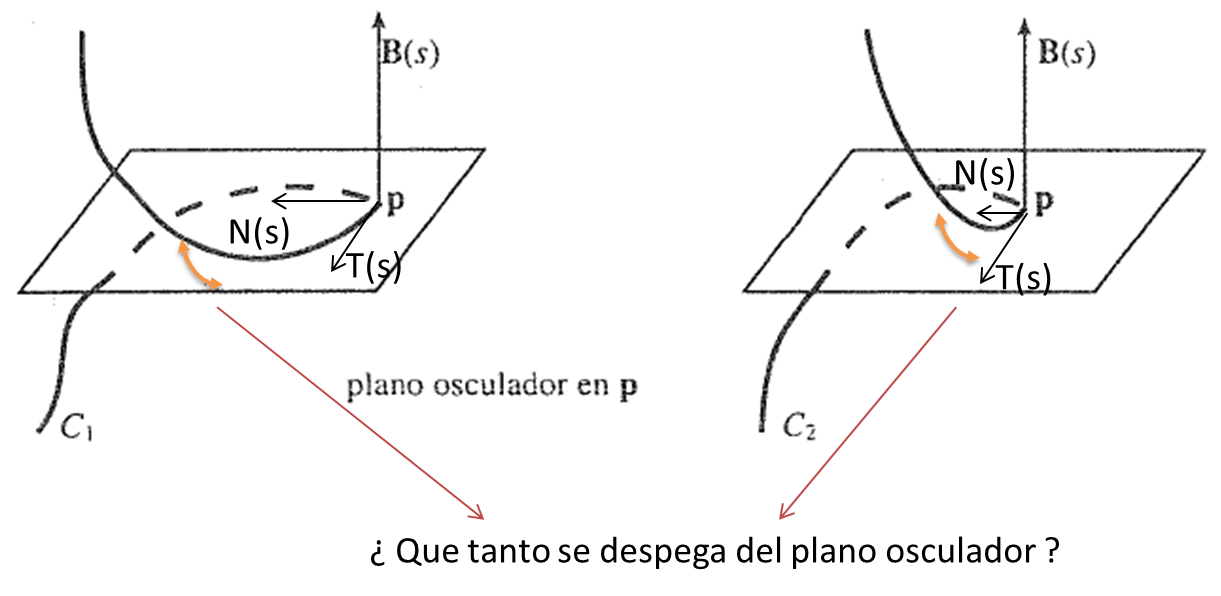
Sea $f:I\subset \mathbb{R}\rightarrow \mathbb{R}^{3}$ una curva tres veces diferenciable parametrizada por longitud de arco. Nuestro objetivo consistira en estimar con que rapidez una curva se aleja de su plano osculador
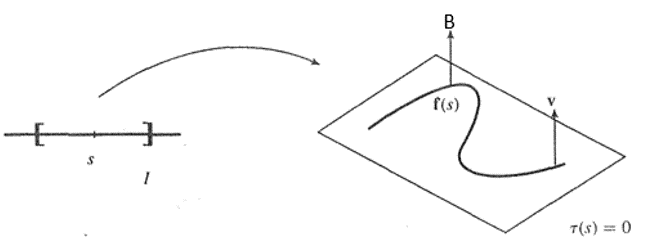
La forma de medir la rapidez de alejamiento de la curva f de su plano osculador es por medio del vector binormal $B(s)=T(s)\times N(s)$, que sabemos es un vector unitario ortogonal al plano osculador de f en P. Puesto que $\|B(s)\|=1$, $\forall~s\in I$, la magnitud de la derivada $\|B'(s)\|$ de $B(s)$ medirá precisamente la rapidez con la que el vector binormal $B(s)$ está cambiando de dirección en los alrededores del punto estudiado. Puesto que $B(s)=T(s)\times N(s)$, tenemos, derivando $$B'(s)=T(s)\times N'(s)+T'(s)\times N(s)$$ El sumando $T'(s)\times N(s)$ que aparece en esta expresión es igual a cero, ya que $T'(s)=f^{\prime\prime}(s)$ es un vector en la dirección de $N(s)$ (y por lo tanto son colineales; por lo que su producto cruz es cero). Entonces nos queda $$B'(s)=T(s)\times N'(s)$$ También tenemos que $$\|B\|=1~\Rightarrow~\frac{d \|B\|^{2}}{ds}=0~\Rightarrow~\frac{d(B\cdot B)}{ds}=0~\Rightarrow~B\cdot B’+B’\cdot B=0~\Rightarrow~B’\cdot B=0~\Rightarrow~B’\bot B $$ Esto nos permite concluir que $B'(s)$ es un vector en el plano osculador de f en s. Por otro lado $$B\cdot T=0~\Rightarrow~(B\cdot T)’=0~\Rightarrow~B’\cdot T+T’\cdot B=0~\underbrace{\Rightarrow}_{\textcolor{red}{T’\cdot B=N~ \|T’\|\cdot B=0}}~B’\cdot T=0~\Rightarrow~B’\bot T$$ De lo anterior podemos concluir que $B’$ tiene la dirección del vector $N$. Debe entonces existir un escalar $\tau(s)$ tal que $$B'(s)=\tau(s)N(s)$$ Definición. Sea $f:I\subset \mathbb{R}\rightarrow \mathbb{R}^{3}$ una curva tres veces diferenciable parametrizada por longitud de arco tal que $f»(s)\neq 0$ $\forall~s\in I$. El número $\tau(s)$ tal que $B'(s)=-\tau(s)N(s)$ se llama torsión de f en s. Notese que $$\|B'(s)\|=|\tau(s)|$$ Ejemplo. Dada la función $$f(t)=(\cos(t),\sin(t),t)$$ cuya reparametrización por longitud de arco es: $$\overline{f}(s)=\left(\cos\left(\frac{s}{\sqrt{2}}\right),\sin\left(\frac{s}{\sqrt{2}}\right),\frac{s}{\sqrt{2}}\right)$$ cuyo vector normal es $$N(s)=\left(-\cos\left(\frac{s}{\sqrt{2}}\right),-\sin\left(\frac{s}{\sqrt{2}}\right),0\right)$$ cuyo vector binormal es $$B(s)=\frac{1}{\sqrt{2}}\left(\sin\left(\frac{s}{\sqrt{2}}\right),-\cos\left(\frac{s}{\sqrt{2}}\right),1\right)$$ de modo que $$B'(s)=\frac{1}{2}\left(\cos\left(\frac{s}{\sqrt{2}}\right),\sin\left(\frac{s}{\sqrt{2}}\right),0\right)$$ y por lo tanto se tiene $$|\tau(s)|=\|B'(s)\|=\frac{1}{2}.~~ \blacksquare$$ Una curva es plana (es decir, es la imagen de un camino $f:[a,b]\rightarrow\mathbb{R}^{3}$ tal que f(s) se encuentra en un plano en $\mathbb{R}^{3}$ para toda $s\in [a,b]$) si y sólo si su torsión es igual a cero $(\forall~s\in [a,b])$. En efecto, si $\tau(s)=0$, se tiene que $B'(s)=0$, por lo que el vector binormal $B(s)$ debe ser constante, es decir $B(s)=v$ para todo $s\in[a,b]$. De aquí se tiene que $$f'(s)\cdot B(s)=f'(s)\cdot v=0~~~\forall~s\in[a,b]$$ (pues $f'(s)$ es ortogonal a $B(s)$), o sea $$\frac{d(f(s)\cdot v)}{ds}=0$$ de donde $f(s)\cdot v=cte~~~\forall~s\in[a,b]$, y por lo tanto, concluimos que $f(s)$ se encuentra en el plano cuyo vector normal es v, $\forall~s\in[a,b]$.
Recíprocamente, si $f(s)$ se encuentra en un plano para toda s en $[a,b]$, entonces dicho plano es el plano osculador de la curva en todo punto de ella, por tanto el vector unitario $B(s)$ no cambia de dirección, por lo que $B'(s)=0$. de donde $\tau(s)=0$ para toda s en $[a,b]$. $\blacksquare$
Fórmula para calcular la Torsión en términos de la parametrización por longitud de arco
La torsión representa una variación en la dirección del vector binormal, procederemos ahora a desarrollar una fórmula para calcularla Sea $\overline{f}:[a,b]\rightarrow\mathbb{R}^{3}$ la reparametrización por longitud de arco de f, $\overline{f}=f\circ\varphi$. Queremos calcular la torsión de f en t, donde $t=\varphi(s)$. Sabemos que \begin{align*} T(s) & =\overline{f}'(s)=\frac{f'(t)}{\|f'(t)\|} \\ T'(s)&=\overline{f}»(s)=\frac{d\left(\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)}{ds} \\ &=\frac{d\left(\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)}{dt}\frac{dt}{ds}=\frac{d\left(\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)}{dt}\frac{1}{\frac{ds}{dt}}\\ &=\frac{d\left(\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)}{dt}\frac{1}{\varphi^{\prime}(s)}\\ &=\frac{d\left(\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)}{dt}\frac{1}{\|f^{\prime}(t)\|}\\ &=\left(\frac{\|f^{\prime}(t)\|f^{\prime\prime}-f^{\prime}(t)\frac{d\left(\|f^{\prime}(t)\|\right)}{dt}}{\|f^{\prime}(t)\|^{2}}\right)\frac{1}{\|f^{\prime}(t)\|}\\ &=\left(\frac{\|f^{\prime}(t)\|f^{\prime\prime}-f^{\prime}(t)\frac{f^{\prime}\cdot f^{\prime\prime}}{\|f^{\prime}(t)\|}}{\|f^{\prime}(t)|^{2}}\right)\frac{1}{\|f^{\prime}(t)\|}~~\left(\frac{d\left(\|f^{\prime}(t)\|\right)}{dt}=\frac{d\sqrt{f^{\prime}(t)\cdot f^{\prime}(t)}}{dt}=\frac{f^{\prime}(t)\cdot f^{\prime\prime}(t)}{\|f^{\prime}(t)\|}\right)\\ &=\left(\frac{\|f^{\prime}(t)\|^{2}f^{\prime\prime}-\left(f^{\prime}(t)\cdot f^{\prime\prime}(t)\right)f^{\prime}(t)}{\|f^{\prime}(t)\|}\right)\frac{1}{\|f^{\prime}(t)\|^{3}}\\ &=\frac{1}{\|f^{\prime}(t)\|^{4}}\left(\|f^{\prime}(t)\|^{2}f^{\prime\prime}(t)-\left(f^{\prime}(t)\cdot f^{\prime\prime}(t)\right)f^{\prime}(t)\right)\\ N(s) &=\frac{\overline{f}^{\prime\prime}(s)}{\kappa(s)} =\frac{\overline{f}^{\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|} \end{align*} calculemos $$B'(s)=T(s)\times N'(s)$$ en este caso \begin{align*} N^{\prime}(s) & =\frac{\|\overline{f}^{\prime\prime}(s)\|\overline{f}^{\prime\prime\prime}(s)-\overline{f}^{\prime\prime}(s)\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|}\right)}{\|\overline{f}^{\prime\prime}(s)\|^{2}} \\ &=\frac{\overline{f}^{\prime\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|}-\overline{f}^{\prime\prime}(s)\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|^{3}}\right) \end{align*} Luego si $B^{\prime}(s)=T(s) \times N^{\prime}(s)$ entonces se tiene que \begin{align*} B^{\prime}(s) &=\overline{f}^{\prime}(s)\times \left(\frac{\overline{f}^{\prime\prime\prime}(s)}{|\overline{f}^{\prime\prime}(s)|}-\overline{f}^{\prime\prime}(s)\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{|\overline{f}^{\prime\prime}(s)|^{3}}\right)\right) \\ &=\frac{1}{|\overline{f}^{\prime\prime}(s)|}\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime\prime}(s)-\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{|\overline{f}^{\prime\prime}(s)|^{3}}\right)\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime}(s) \end{align*} La torsión esta dada por \begin{align*} B^{\prime}(s) &=\tau(s)N(s) \\ &\Rightarrow B^{\prime}(s)\cdot N(s)=\tau(s)N(s)\cdot N(s) \\ &\Rightarrow B^{\prime}(s)\cdot N(s)=\tau(s)\|N(s)\|^{2} \\ &\Rightarrow B^{\prime}(s)\cdot N(s)=|\tau(s)| \end{align*} Entonces \begin{align*} \tau(s) &=B^{\prime}(s)\cdot N(s) \\ &=\left(\frac{1}{\|\overline{f}^{\prime\prime}(s)\|}\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime\prime}(s)-\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{|\overline{f}^{\prime\prime}(s)|^{3}}\right)f^{\prime}(s)\times \overline{f}^{\prime\prime}(s)\right)\cdot \frac{\overline{f}^{\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|} \\ &=\frac{1}{\|\overline{f}^{\prime\prime}(s)\|^{2}}\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime\prime}(s)\cdot \overline{f}^{\prime\prime}(s)-\cancel{\left(\frac{\overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{\|\overline{f}^{\prime\prime}(s)\|^{4}}\right)\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime}(s)} \\ &=\frac{1}{\|\overline{f}^{\prime\prime}(s)\|^{2}}\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime\prime}(s)\cdot \overline{f}^{\prime\prime}(s) \end{align*} La cancelación es porque $$\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime}(s)=0$$ y como $$k(s)=\|\overline{f}^{\prime\prime}\|$$ se tiene entonces que $$\boxed{\tau(s)=\frac{\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime\prime}(s)\cdot \overline{f}^{\prime\prime}(s)}{k(s)^{2}}=-\frac{\overline{f}^{\prime}(s)\times \overline{f}^{\prime\prime}(s)\cdot \overline{f}^{\prime\prime\prime}(s)}{k(s)^{2}}}$$
Fórmula para calcular la Torsión en términos del parámetro t
Ahora vamos a expresar la torsión en términos de t. Ya hemos visto que \begin{align*} \overline{f}^{\prime}(s)&=\frac{f^{\prime}(t)}{|f^{\prime}(t)|} \\ f^{\prime\prime}(s) & =\frac{1}{\|f^{\prime}(t)\|^{4}}\left(|f^{\prime}(t)|^{2}f^{\prime\prime}(t)-\left(f^{\prime}(t)\cdot f^{\prime\prime}(t)\right)f^{\prime}(t)\right) \end{align*} Por lo tanto \begin{align*} f^{\prime}(s)\times f^{\prime\prime}(s) &=\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\times \left(\frac{1}{\|f^{\prime}\|^{4}}\left(\|f^{\prime}(t)\|^{2}f^{\prime\prime}(t)-\left(f^{\prime}(t)\cdot f^{\prime\prime}(t)\right)f^{\prime}(t)\right)\right) \\ &=\left(\frac{1}{\|f^{\prime}(t)\|^{3}}\right)f^{\prime}(t)\times f^{\prime\prime}(t)-\left(\frac{f^{\prime}(t)\cdot f^{\prime\prime}(t)}{\|f^{\prime}(t)\|^{5}}\right)\cancel{f^{\prime}(t)\times f^{\prime}(t)} \\ &=\left(\frac{1}{\|f^{\prime}(t)\|^{3}}\right)f^{\prime}(t)\times f^{\prime\prime}(t) \end{align*} Mientras que \begin{align*} f^{\prime\prime\prime}(s) &=\frac{df^{\prime\prime}(s)}{ds}=\left(\frac{df^{\prime\prime}(s)}{dt}\right)\frac{dt}{ds}=\left(\frac{df^{\prime\prime}(s)}{dt}\right)\frac{1}{\frac{ds}{dt}} \\ &=\left(\frac{df^{\prime\prime}(s)}{dt}\right)\frac{1}{\|f^{\prime}(t)\|} \\ &=\frac{1}{\|f^{\prime}(t)\|}\frac{d}{dt}\left(\frac{1}{\|f^{\prime}\|^{4}}\left(\|f^{\prime}(t)\|^{2}f^{\prime\prime}(t)-\left(f^{\prime}(t)\cdot f^{\prime\prime}(t)\right)f^{\prime}(t)\right)\right) \\ &=\left(\frac{1}{\|f^{\prime}(t)\|}\right)\left[\left(\frac{1}{\|f^{\prime}(t)\|^{2}}f^{\prime\prime}(t)\right)+\left(\frac{1}{\|f^{\prime}(t)\|^{2}}\right)^{\prime}f^{\prime\prime}(t)\right. \\ &\left.-\left(\frac{f^{\prime}(t)\cdot f^{\prime\prime}(t)}{\|f^{\prime}(t)\|^{4}}\right)f^{\prime\prime}(t)-f^{\prime}(t)\left(\frac{f^{\prime}(t)\cdot f^{\prime\prime}(t)}{\|f^{\prime}(t)\|^{4}}\right)^{\prime}~\right] \end{align*} Por lo tanto \begin{align*} f^{\prime}(s)\times f^{\prime\prime}(s)\cdot f^{\prime\prime\prime}(s) &=\left(\frac{1}{\|f^{\prime}(t)\|^{3}}\right)f^{\prime}(t)\times f^{\prime\prime}(t)\cdot \left(\frac{1}{\|f^{\prime}(t)\|}\right)\left[\left(\frac{1}{\|f^{\prime}(t)\|^{2}}f^{\prime\prime}(t)\right)\right. \\ &\left.+\cancel{\left(\frac{1}{\|f^{\prime}(t)\|^{2}}\right)^{\prime}f^{\prime\prime}(t)}-\cancel{\left(\frac{f^{\prime}(t)\cdot f^{\prime\prime}(t)}{\|f^{\prime}(t)\|^{4}}\right)f^{\prime\prime}(t)}-\cancel{f^{\prime}(t)\left(\frac{f^{\prime}(t)\cdot f^{\prime\prime}}{\|f^{\prime}(t)\|^{4}}\right)^{\prime}}~\right] \\ &=\frac{1}{\|f^{\prime}(t)\|^{3}}f^{\prime}(t)\times f^{\prime\prime}(t)\cdot \frac{1}{\|f^{\prime}(t)\|^{3}}f^{\prime\prime\prime}(t) \\ &=\frac{1}{\|f^{\prime}(t)\|^{6}}f^{\prime}(t)\times f^{\prime\prime}(t)\cdot f^{\prime\prime\prime}(t) \end{align*} finalmente \begin{align*} \tau(t) &=\frac{f^{\prime}(s)\times f^{\prime\prime\prime}(s)\cdot f^{\prime\prime}(s)}{k(s)^{2}} \\ &=-\frac{f^{\prime}(s)\times f^{\prime\prime}(s)\cdot f^{\prime\prime\prime}(s)}{k(s)^{2}} \\ &=-\frac{1}{\|f^{\prime}(t)\|^{6}}\frac{f^{\prime}(t)\times f^{\prime\prime}(t)\cdot f^{\prime\prime\prime}}{\left(\frac{\|f^{\prime}\times f^{\prime\prime}(t)\|}{\|f^{\prime}(t)\|^{3}}\right)^{2}} \end{align*} Tenemos que la torsión esta dada por $$\boxed{\tau(t)=-\frac{f^{\prime}(t)\times f^{\prime\prime}(t)\cdot f^{\prime\prime\prime}(t)}{\left(\|f^{\prime}(t)\times f^{\prime\prime}(t)\|\right)^{2}}}$$ Ejemplo. Probar que la torsión de la hélice $f(t)=(a\cos(t),a\sin(t),bt)$ es $$\tau(t)=\frac{b}{a^{2}+b^{2}}$$ Solución. En este caso \begin{align*} f'(t) & =(-a\sin(t),a\cos(t),b) \\ f^{\prime\prime}(t) & =(-a\cos(t),-a\sin(t),0) \\ f^{\prime\prime\prime}(t) & =(a\sin(t),-a\cos(t),0) \end{align*} Por lo que $$f'(t)\times f^{\prime\prime}(t)=\left|\begin{matrix}i&j&k\\-a\sin(t)&a\cos(t)&b\\-a\cos(t)&-a\sin(t)&0\end{matrix}\right|=(ab\sin(t),-ab\cos(t),a^{2})$$ tenemos entonces $$f'(t)\times f^{\prime\prime}(t)\cdot f^{\prime\prime\prime}(t)=(ab\sin(t),-ab\cos(t),a^{2})\cdot (a\sin(t),-a\cos(t),0)=a^{2}b$$ $$\|f'(t)\times f»(t)\|=\|(ab\sin(t),-ab\cos(t),a^{2})\|=\sqrt{a^{2}b^{2}+a^{4}}=|a|\sqrt{a^{2}+b^{2}}$$ luego, $$\tau(t)=\frac{[f'(t)\times f^{\prime\prime}(t)]\cdot f^{\prime\prime\prime}(t)}{\|f'(t)\times f^{\prime\prime}(t)\|^{2}}=\frac{a^{2}b}{\left(|a|\sqrt{a^{2}+b^{2}}\right)^{2}}=\frac{b}{a^{2}+b^{2}}.~~ \blacksquare$$
Más adelante
En la siguiente entrada veremos cómo las curvaturas de las ecuaciones polares determinadas por los vectores tangente, normal y binormal dan origen a las fórmulas de Frenet-Serret. En la geometría de las curvas dichas fórmulas juegan un papel importante.
Tarea Moral
1.- Determine la curvatura de la parábola: $y=4px^2$
2.- Demuestra que $N´=-kl´T´+tl’B$
3.- Determina la torsión de la cúbica descrita por $f(t)=(t,t^2,t^3)$
4.-Determina la torsión de la hélice cónica descrita por $f(t)=(tcost, tsent, t)$ en el punto $(0,0,0)$.
5.- Determina la torsión de la curva descrita por $f(t)=(t-sent, 1-cost,t)$ en los puntos: $t=0$, $t=\dfrac{\pi}{2}$, $t=\pi$
Enlaces
El siguiente enlace muestra una construcción en geogebra sobre el trazo de circunferencia osculadora de la curva $cos(2x)$
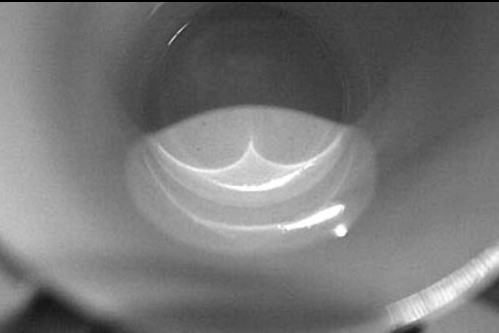
La siguiente entrada muestra varios ejemplos de caústicas, una cáustica en matemáticas es una curva generada apartir de los centros de curvatura de otra curva dada.
Cuando la luz incide sobre el borde interior de una taza circular, como una taza de café, se forma en el interior una curva luminosa brillante con forma de corazón.
calcular la longitud de arco de una curva no solo nos permite medir “cuánto mide” la trayectoria, sino que también nos introduce de manera natural en la idea de cómo cambia la curva punto a punto. Es precisamente en este contexto donde surgen de manera natural los vectores tangente, normal y binormal.
Plano Tangente
Sea $f:[a,b]\rightarrow\mathbb{R}^{n}$ una curva tal que el vector derivada $f'(t)\neq 0$ para todo $t\in[a,b]$, es tangente a f y apunta en la dirección que el parámetro t crece. Definición. Dada una curva $f:[a,b]\rightarrow\mathbb{R}^{n}$, el vector unitario tangente $T$ es otra función vectorial asociada a la curva, y está definida por: \[ T(t)=\frac{f^{\prime}(t)}{\|f^{\prime}(t)\|}\ \ \ \ \text{si}\ \ \ \|f^{\prime}(t)\| \neq 0. \] Si en la definición anterior, la curva está parametrizada por longitud de arco, considerando que $\|\overline{f}'(s)\|=1$, se tiene que $$T(s)=\overline{f}'(s)$$
Propiedades del Vector Tangente
(a) En este caso se tiene que \[ \|T(t)\|= \left\| \frac{f^{\prime}(t)}{\|f^{\prime}(t)\|} \right\|= \frac{1}{\|f^{\prime}(t)\|} \|f^{\prime}(t)\|=1 \] por lo tanto $T$ es de magnitud constante. (b) Tenemos que \begin{align*} \|T(t)\|=1&\Rightarrow \|T(t)\|^2=1\\&\Rightarrow \frac{d}{dt}\left(\|T(t)\|^2\right)=0\\&\Rightarrow \frac{d}{dt}\left(T(t)\cdot T(t)\right)=0\\&\Rightarrow T'(t)\cdot T(t)+T(t)\cdot T'(t)=0\\&\Rightarrow 2T(t)\cdot T'(t)=0\\&\rightarrow T(t)\cdot T'(t)=0\end{align*} Esto es $T(t)$ y $T'(t)$ son ortogonales. Este resultado nos permite definir un vector unitario ortogonal a $T(t)$ y que tiene la misma dirección que $T'(t)$.
Vector Normal Principal
Definición. Si $\|T^{\prime}(t)\|\neq 0$ el vector unitario que tiene la misma dirección que $T^{\prime}$ se llama Normal Principal a la curva y se designa por $N(t)$. Asi pues $N(t)$ es una nueva función vectorial asociada a la curva y esta dada por la ecuación: \[ N(t)=\frac{T^{\prime}(t)}{\|T^{\prime}(t)\|},\ \ \ \ \text{si} \ \ \|T^{\prime}(t)\| \neq 0 \] Notese que $$\|N(t)\|=\left\|\frac{T^{\prime}(t)}{\|T^{\prime}(t)\|}\right\|=1$$ Si en la definición anterior, la curva está parametrizada por longitud de arco, considerando que $T(s)=\overline{f}'(s)$ , se tiene $$N(s)=\frac{\overline{f}^{\prime\prime}(s)}{|\overline{f}^{\prime\prime}(s)|}=\frac{T'(s)}{\|T'(s)\|}$$
Vector Binormal
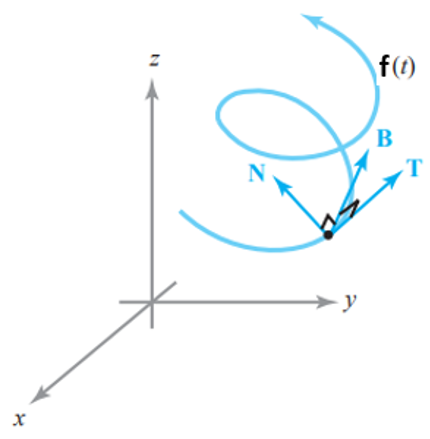
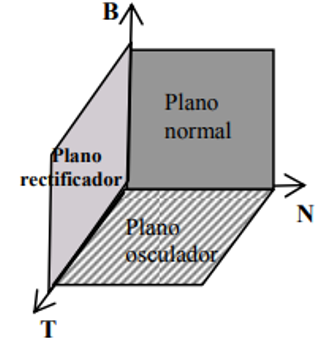
Un tercer vector definido mediante $$B(t)=T(t)\times N(t)$$ recibe el nombre de Vector binormal. Notese que $$\|B(t)\|=\|T(t)\times N(t)\|=\|T(t)\|\|N(t)\|\sin\left(\frac{\pi}{2}\right)=1$$ En el punto correspondiente a $f(t)$ en la curva, los vectores $T(t)$, $N(t)$ y $B(t)$ conforman un trío de vectores unitarios y mutuamente ortogonales. Estos dan lugar a un sistema de coordenadas llamado sistema de referencia TNB o sistema de referencia de Frenet-Serret de la curva C. Los vectores $T(t)$, $N(t)$ y $B(t)$ juegan en el punto de la curva correspondiente a $f(t)$ un papel similar al que juega la tríada i, j y k en el origen del espacio tridimensional. Esta última tríada permace fija, en cambio los vectores $T(t)$, $N(t)$ y $B(t)$ conforman una tríada movil que se mueve a lo largo de la curva.
Ejemplo. Dada la curva $r(t)=\cos t \hat{i}+\sin t \hat{j} + t\hat{k}$ cuya parametrización por longitud de arco es \[ \bar{r}(s)=\left(\cos\left(\frac{s}{\sqrt{2}}\right),\sin\left(\frac{s}{\sqrt{2}}\right),\frac{s}{\sqrt{2}}\right) \] Hallar los vectores Tangente, Normal y Binormal en un punto $r(s)$. Solución.
Sea $f:[a,b]\rightarrow\mathbb{R}^{3}$ una curva con triada móvil $T(t)$, $N(t)$ y $B(t)$. Sea $P=(x_{0},y_{0},z_{0})$ un punto de la curva f tal que $f(t_{0})=(x_{0},y_{0},z_{0})$. Se llama Plano Osculador de f en el punto P, al plano que pasa por P y es paralelo a los vectores $T(t_{0})$ y $N(t_{0})$. Este plano tiene por ecuación $$\boxed{B(t_{0})\cdot [(x,y,z)-(x_{0},y_{0},z_{0})]=0}$$ El plano osculador es el plano que mejor se adapta a la curva en cada uno de sus puntos. Si la curva es plana, el plano osculador coincide con el plano de la curva. Ejemplo. Consideremos la curva $f:\mathbb{R}\rightarrow\mathbb{R}^3$ dado por: \[ f(s)=\left( \cos\left(\frac{s}{\sqrt{2}}\right), \sin\left(\frac{s}{\sqrt{2}}\right), \frac{s}{\sqrt{2}} \right) \] el cual es dos veces diferenciable parametrizado por longitud de arco y que describe una hélice circular en $\mathbb{R}^3$. Obtenga la ecuación del plano osculador en el punto $f(\sqrt{2}\pi)=(-1,0,\pi)$. Solución. Tenemos que: \[ T(s)=\frac{f^{\prime}(s)}{\|f^{\prime}(s)\|}= \left( -\frac{1}{\sqrt{2}} \sin\left(\frac{s}{\sqrt{2}}\right), \frac{1}{\sqrt{2}}\cos \left(\frac{s}{\sqrt{2}}\right), \frac{1}{\sqrt{2}} \right) \] y $T(\sqrt{2}\pi)=\left(0,-\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)$, por otro lado: \begin{align*}N(s)&=\frac{T^{\prime}(s)}{\|T^{\prime}(s)\|}\\&=\left( -\frac{1}{\sqrt{2}}\cos\left(\frac{s}{\sqrt{2}}\right)\left(\frac{1}{\sqrt{2}}\right), -\frac{1}{\sqrt{2}}\left(\frac{1}{\sqrt{2}}\right)\sin\left(\frac{s}{\sqrt{2}}\right),0 \right)\\&=\left( -\left(\frac{1}{2}\right)\cos\left(\frac{s}{\sqrt{2}},\right),-\left(\frac{1}{2}\right)\sin\left(\frac{s}{\sqrt{2}}\right),0 \right)\end{align*} y $N(\sqrt{2}\pi)=(1,0,0)$. Por lo que \[ T(\sqrt{2}\pi)\times N(\sqrt{2}\ \pi) =\left| \begin{array}{ccc} \hat{i} & \hat{j} & \hat{k} \\ \frac{-1}{\sqrt{2}}\sin\left(\frac{s}{\sqrt{2}}\right) & \frac{1}{\sqrt{2}}\cos\left(\frac{s}{\sqrt{2}}\right) & \frac{1}{\sqrt{2}}\\-\left(\frac{1}{2}\right)\cos\left(\frac{s}{\sqrt{2}}\right) & -\left(\frac{1}{2}\right)\sin\left(\frac{s}{\sqrt{2}}\right) & 0\\ \end{array}\right|= \left(\frac{1}{2\sqrt{2}}\sin\left(\frac{s}{\sqrt{2}}\right),\frac{-1}{2\sqrt{2}}\cos\left(\frac{s}{\sqrt{2}}\right),\frac{1}{2\sqrt{2}} \right) \] al evaluar en $\sqrt{2}\ \pi$ nos queda $\displaystyle{\left(0,\frac{1}{2\sqrt{2}},\frac{1}{2\sqrt{2}}\right)}$. Por lo tanto la ecuación del plano osculador en $P=(-1,0,\pi)$ es: \[ (x+1,y,z-\pi)\cdot\left(0,\frac{1}{2\sqrt{2}},\frac{1}{2\sqrt{2}}\right)=0 \] \[ \Rightarrow \frac{1}{2\sqrt{2}} (y) +\frac{1}{2\sqrt{2}} (z-\pi)=0 \] \[ \Rightarrow y+z=\pi.~~ \blacksquare \]
Plano Normal
Se llama Plano Normal de f en el punto P, al plano que pasa por P y es paralelo a los vectores $N(t_{0})$ y $B(t_{0})$. Este plano tiene por ecuación $$\boxed{T(t_{0})\cdot [(x,y,z)-(x_{0},y_{0},z_{0})]=0}$$ Ejemplo. Consideremos la curva $f:\mathbb{R}\rightarrow \mathbb{R}^3$ dado por: \[ f(t)=\left( 2\cos\left(t\right), 2\sin\left(t\right), t \right) \] el cual es dos veces diferenciable y que describe una hélice circular en $\mathbb{R}^3$. Obtenga la ecuación del plano normal en el punto $f\left(\frac{\pi}{2}\right)=\left(0,2,\frac{\pi}{2}\right)$. Solución. Tenemos que: \[ T(t)=\frac{1}{\sqrt{5}}\left(-2\sin(t),2\cos(t),1\right) \] y $\displaystyle{T\left(\frac{\pi}{2}\right)=\frac{1}{\sqrt{5}}\left(-2,0,1\right)}$. Por lo tanto la ecuación del plano normal es: \[ \frac{1}{\sqrt{5}}(-2,0,1)\cdot\left[(x,y,z)-\left(0,2,\frac{\pi}{2}\right)\right]=0 \] \[ \Rightarrow 4x-2z+\pi=0.~~\blacksquare \]
Plano Rectificador
Se llama Plano rectificador de f en el punto P, al plano que pasa por P y es paralelo a los vectores $T(t_{0})$ y $B(t_{0})$. Este plano tiene por ecuación $$\boxed{N(t_{0})\cdot [(x,y,z)-(x_{0},y_{0},z_{0})]=0}$$ Ejemplo. Consideremos la curva $f:\mathbb{R}\rightarrow \mathbb{R}^3$ dada por: \[ f(t)=\left( 2\cos\left(t\right), 2\sin\left(t\right), t \right) \] la cual es dos veces diferenciable y que describe una hélice circular en $\mathbb{R}^3$. Obtenga la ecuación del plano rectificador en el punto $\displaystyle{f\left(\frac{\pi}{2}\right)=\left(0,2,\frac{\pi}{2}\right)}$. Solución. Tenemos que: \[ N(t)=\left(-\cos(t),-\sin(t),0\right) \] y $\displaystyle{N\left(\frac{\pi}{2}\right)=\left(0,-1,0\right)}$. Por lo tanto la ecuación del plano rectificador es: \[ (0,-1,0)\cdot\left[(x,y,z)-\left(0,2,\frac{\pi}{2}\right)\right]=0 \] \[ \Rightarrow y-2=0.~~\blacksquare \]
Mas adelante
En la siguiente entrada veremos como a partir de vectores caracterizados en esta entrada podemos definir y calcular la curvatura y radio de curvatura de una curva o plano.
Tarea Moral
1.- Determina $T$ y $N$ para cada una de las siguientes curvas:
La parábola $x=pt^2$ , $y=2pt$.
La elipse $f(\theta)=(acos\theta, b sen\theta)$, $\theta \in [0,2\pi]$; $a,b>0$
2.- Si una curva está descrita por $f(t)= (t,t^2,t^3)$, determína $T(t)$, $N(t)$, $B(t)$ y el plano osculador cuando $t=0$ y $t=1$
3.- Si $C$ es una curva en $R^3$ descrita por $f$ demuestra que
4.- Demuestra que si una curva $C$ se encuentra en el plano $P$ en $R^3$ entonces el plano osculador en cualquier punto de $C$ es $P$.
5.- Determina $T,N$ y $B$ y el plano osculador en $f(0)$ para las curvas en seguida descritas.
a) $f(t)= (t cost, t sent, t)$
b) $f(t)= (t-sent, 1-cost, t)$
Enlaces
El siguiente interactivo contiene un visualizador de las funciones vectoriales parábola y circunferencia con su vector tangente. Si tienes experiencia con el código puedes implementar cualquier otra función de tu elección.



 El siguiente interactivo contiene un visualizador de las funciones vectoriales parábola y circunferencia con su vector tangente. Si tienes experiencia con el código puedes implementar cualquier otra función de tu elección.
El siguiente interactivo contiene un visualizador de las funciones vectoriales parábola y circunferencia con su vector tangente. Si tienes experiencia con el código puedes implementar cualquier otra función de tu elección.